闭合导线控制点坐标计算表
合集下载
闭合导线计算表祥解

观测 左 角: 角度改正数: 方 位 角:
各实测方位角: 平 距:
△X(坐标增量):COS(各点方位角)X各点边长。 △Y(坐标增量):Sin(各点方位角)X各点边长。 改 正 正 数 数 X: =-(△X之总和/各边长总和)×实测边长。 Y: =-(△Y之总和/各边长总和)×实测边长。
10 改
11 改正后坐标增量: △X=△X(坐标增量)+-改正数X。 12 改正后坐标增量: △Y=△Y(坐标增量)+-改正数Y。 13 平差后X坐标: 14 平差后Y坐标: =置镜点X坐标+-改正后坐标增量△X。 =置镜点Y坐标+-改正后坐标增量△Y。
闭合导线计算表
1 2 3 4 5 6 7 8 9 点 号: 实测点名、前后2点为已知边长(坐标点)。 闭合环各边之实测角度、边长。 理论内角之和-各观测角之内角和(n-2)x180°n为所有边之和。 (Pol(置镜X-后视X,置镜Y-后视Y))=起始点方位角。 各测点方位角=起始点方位角+各观测点左角-180°。 为各3条依次类推。 √((X-X1)+(Y-Y1))的平方=距离 或 Pol(X1-X2,Y1-Y2) 1201+TCR400全站仪的软件平曲线的编设 曲线左转向角半径与直线半径都输‘-’,右转向角半径与直线半径输‘+’。
闭合导线坐标计算(顺时针右内角)
B 127 25 38 127.4272222 -4.444444445 127.4259877 269.5280864 183.568
A 138 24 2 138.4005556 -4.444444445
和
—— —— —— 1260.011111
-40
已知α1= 0 0 1 0.000277778
4.978643 143.16446 4.957813765 143.14708 765.6561 605.9606
-88.37454 109.57122 -88.3950051 109.554144 770.6139 749.1076
-66.58147 26.744293 -66.591904 26.7355882 682.2189 858.6618 -160.6265 3.5615855 -160.64988 3.54209448 615.627 885.3974 -80.08118 -60.24492 -80.0957482 -60.2570738 454.9771 888.9395
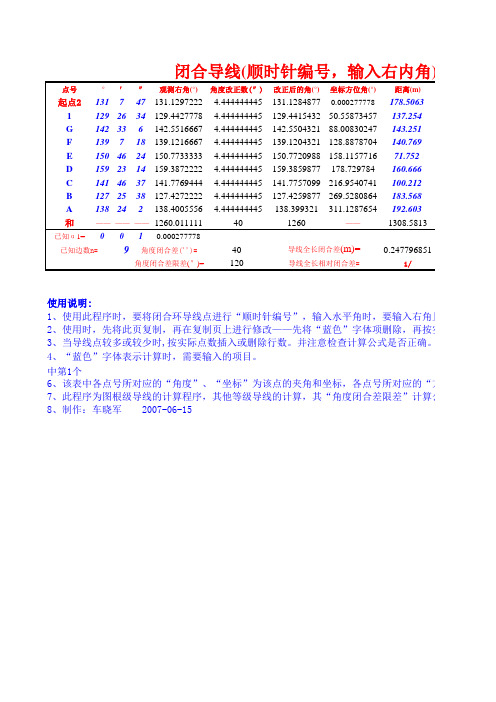
闭合导线(顺时针编号,输入右内角)坐标计算
点号
起点2 1 G
° ′ ″ 观测右角(°) 角度改正数(″) 改正后的角(°) 坐标方位角(°)
131 7 47 131.1297222 -4.444444445 131.1284877 0.000277778 129 26 34 129.4427778 -4.444444445 129.4415432 50.55873457 142 33 6 142.5516667 -4.444444445 142.5504321 88.00830247
-1.511931 -183.5618 -1.53862168 -183.584043 374.8813 828.6824