中国教育机器人大赛智能搬运比赛规则 Ver1.0
中国高校智能机器人创意大赛竞赛章程
中国高校智能机器人创意大赛竞赛章程一、竞赛目的中国高校智能机器人创意大赛旨在激发高校学生对于智能机器人技术的创新热情,培养其创新思维和实践能力,同时推动智能机器人技术的发展和应用。
二、组织机构1. 主办单位:教育部高等教育司、中国教育电视台2. 承办单位:各高校及有关单位3. 协办单位:各相关企业、行业协会等三、参赛对象全国高校全日制本科生、硕士研究生及博士研究生均可参加。
四、竞赛形式1. 团队报名:参赛者以团队形式报名,每个团队人数不超过5人。
2. 创意提交:参赛者需提交一份创意方案,包括机器人设计、功能及应用等方面的描述。
3. 现场答辩:入围决赛的团队需进行现场答辩,展示机器人模型及功能演示。
4. 评选结果:根据创意方案和现场答辩的表现,由评委团评选出优胜者。
五、参赛作品要求1. 创意性:作品应具有新颖性、创新性和实用性,能够解决实际问题或满足特定需求。
2. 技术性:作品应基于智能机器人技术,具备感知、决策、执行等功能。
3. 完整性:作品方案应完整,包括设计说明、技术实现、应用前景等方面的描述。
4. 规范性:作品提交应符合大赛规定的格式和要求。
六、竞赛流程1. 报名阶段:参赛者需在大赛官方网站完成团队注册及报名。
2. 作品提交阶段:参赛者在规定时间内提交创意方案。
3. 初审阶段:组委会对提交的创意方案进行初审,筛选出优秀作品进入决赛。
4. 决赛阶段:入围团队进行现场答辩,评选出最终优胜者。
5. 颁奖阶段:组委会对优胜者进行颁奖及表彰。
七、评审标准1. 创意性:作品的新颖性、创新性和实用性。
2. 技术性:作品的技术难度和实现水平。
3. 完整性:作品的方案完整性和实施可行性。
4. 规范性:作品提交的规范性和准确性。
机器人搬运赛竞赛规则-V1.0
* Please note that this is draft version of the rules. It is not the final version therefore, there may have some changes until 2 months before the competition.Transporter机器人搬运赛组别:中学组(A组、B组)、小学组(A组、B组)成员:每组一台机器人,一位参赛队员1. Game DescriptionTransporter is a game that robot transport specified target to assigned goal in IROC official playfield in time. The robot who transports all targets and returns at time closest to given time will win the game.It is essential to understand participant’s own robot fully, dynamics and physical laws about robot, sensor control techniques, and programming in order to construct robot and program it.本项目为轨迹类计时赛,机器人从起点出发,完成指定搬运任务,在指定时间到达终点后停住。
本项目非比谁更快,而是比谁更精准。
机器人不能推、拖目标物,只能将目标物搬里地面并运送。
2. Robot rule2-1. Robot type 机器人类型No restriction 没有特别限制。
2-2. Construction 机器人搭建2-2-1. Built on-site 现场搭建The robots should be built on-site by the participant during the construction time except for the robot controller.机器人应在比赛当场搭建。
智能机器人比赛规则
智能机器人比赛规则智能机器人比赛是一项刺激、激烈且极具挑战性的竞赛活动。
参与者的机器人将经过一系列的测试和比较,以决出最出色的机器人团队。
为了保证比赛的公正和规范性,下面将详细介绍智能机器人比赛的规则。
一、参赛机器人资格要求1. 参赛机器人应具备自主学习和智能判断的能力,能够在复杂环境下自主决策。
2. 参赛机器人应当符合相关安全要求,不能对人体和环境造成危害。
3. 参赛机器人团队应当具备必要的技术能力和人员配备,能够进行机器人的设计、制作和调试。
4. 参赛机器人可以由单一团队或多个团队合作组成,但每个团队只能提交一台机器人。
二、比赛项目和要求1. 导航挑战:机器人需要在复杂迷宫中,通过自主识别和导航的方式,找到指定目标点。
机器人在完成任务过程中,需要避开障碍物、迂回绕道,并快速准确地到达目标点。
2. 抓取挑战:机器人需要凭借自身的机械手臂或其他相应机构,完成指定形状物体的抓取和搬运任务。
机器人在任务中需要根据不同的物体形状和位置变化,调整抓取方式并成功完成任务。
3. 对话挑战:机器人需要具备语音识别和语义理解的能力,能够与操作员进行自然对话。
机器人需要能够正确理解操作员的指令,并给出明确准确的回应,以完成指定的任务。
4. 交互挑战:机器人需要通过视觉识别和动作规划,与人类进行实时的交互。
机器人需要跟随人类的指引,完成给定的任务,例如:握手、帮助人们搬运物体等。
三、比赛规则和评分方式1. 参赛机器人完成任务的时间将作为最终评分的重要指标,时间越短,得分越高。
2. 参赛机器人在执行任务过程中,如发生失误或出现故障,将会扣除相应的分数。
3. 机器人中途或在任务完成后,需自主回到起点。
如果机器人不能自主完成回到起点的任务,将会扣除相应的分数。
4. 常规任务和高级任务将有不同的得分要求,高级任务难度更大,得分更高。
5. 评分标准包括任务完成度、时间效率、准确度和机器人的创新性。
四、比赛安全和纪律要求1. 比赛过程中,参赛机器人应当遵守相关的安全规定,如不能抛洒危险物品、不能对其他机器人或人员造成伤害等。
2013中国教育机器人大赛智能搬运比赛演示程序说明

2013中国教育机器人大赛智能搬运竞赛演示程序说明深圳市中科鸥鹏智能科技有限公司2013年7月目录第一章智能搬运比赛简介 (3)1.1 比赛任务介绍 (3)第二章组装智能搬运机器人 (4)2.1 智能搬运机器人零件 (4)2.2 智能搬运机器人安装说明 (4)第三章超声波传感器测试说明 (7)3.1 超声波传感器技术参数介绍 (7)3.2 超声波测试程序 (8)第四章QTI线跟踪传感器测试说明 (10)4.1 QTI传感器技术参数介绍 (10)4.2 QTI传感器测试程序 (10)第五章智能搬运算法说明及程序 (12)5.1 智能搬运算法说明 (12)5.2 智能搬运程序 (13)第一章智能搬运比赛简介智能搬运是“中国教育机器人比赛”的一个比赛项目,智能搬运比赛是基于8位单片机的小型机器人比赛项目。
在比赛场地里移动,并将不同颜色的色块分类搬运到对应的位置。
比赛的记分根据机器人搬运物体安置位置的精度和完成任务时间来决定分值的高低。
该比赛模拟了工业自动化过程中自动化物流系统的实际工作过程,使参赛队员在实践中了解自动化物流系统的制作过程。
1.1 比赛任务介绍图1.1 智能搬运场地图如图1.1所示绿色区域为智能搬运场地的出发区。
机器人从出发区出发,到达物料储存区后,分拣其赛前1小时抽签决定好的任务,即先从5个预知颜色色块(黄、白、红、黑、蓝)按照顺序抽取4个颜色色块分别依次放到A,B,D,E位置,然后将剩下的1个色块通过抽签放到F、G、H和I中的一个位置。
在1小时内修改和调整程序,控制机器人运动,以便将5个颜色色块准确地搬运到对应的5个颜色中心区域内,最后回到出发区。
第二章组装智能搬运机器人2.1 智能搬运机器人零件⏹宝贝车车体一套⏹搬运手爪一个⏹超声波传感器一个⏹QTI线跟踪套件四个⏹C51+AVR教学板一个⏹导线和连接线若干⏹螺钉、螺母、铜柱和固定架若干⏹5-8V电源一个以下为部分智能搬运机器人零件的实物图。
2021 中国机器人大赛比赛规则

2021 中国机器人大赛比赛规则
2021中国机器人大赛是由中国机器人大赛组委会主办的一项竞赛活动。
比赛规则如下:
1. 比赛类别:
a. 智能机器人竞赛类别:包括机器人足球、机器人救援、机器人舞蹈等。
b. 工业机器人竞赛类别:包括工业机器人操作、装配、焊接等。
2. 比赛组别:
a. 高校组:参赛队伍由高校学生组成,有固定学术指导老师。
b. 中小学组:参赛队伍由中小学生组成,有固定指导老师。
3. 参赛队伍:
a. 队伍人数:每支队伍一般为3-5人,不同赛项可能会有不同要求。
b. 参赛资格:参赛队伍需经过选拔赛等环节,获得参赛资格。
4. 比赛内容和评分:
a. 比赛内容将根据具体赛项安排,比如机器人足球比赛的规则、比赛场地等。
b. 比赛成绩将根据机器人的表现进行评分,包括比分、完赛时间、技术操作等方面。
5. 设备和技术规定:
a. 参赛队伍需自备相关设备和机器人。
b. 机器人规格、参数等需符合比赛规定,如机器人尺寸、重量、动力系统等。
c. 参赛队伍需具备相关机器人技术和操作技能。
6. 比赛组织与裁判:
a. 比赛由组委会组织,设有裁判团队进行监督和评判。
b. 比赛过程中,裁判可以对比赛场地、规则等进行适当调整和解释。
7. 奖项设置:
a. 比赛设有冠军、亚军、季军等奖项。
b. 根据比赛项目和参赛队伍数量,还可能设有最佳球队、技术创新奖、优秀组织奖等。
以上是一般的比赛规则,具体的规则可能会根据比赛项目和赛区的不同而有所调整和变化。
参赛队伍在报名之前,应详细了解和遵守具体的比赛规则。
智能搬运机器人比赛规则

智能搬运机器人比赛规则智能搬运机器人比赛已成为当今科技领域中备受关注与热议的话题。
这项比赛旨在鼓励参赛者利用人工智能技术设计和开发能够自主操控、高效搬运物品的机器人。
为了保证比赛的公平与准确性,组织者制定了一系列的比赛规则。
下面将重点阐述这些规则。
1. 参赛条件参赛者必须是合法注册的团队或个人,拥有合法运营机器人的资格。
参赛者的机器人必须符合比赛要求的尺寸、重量和功能要求。
参赛者需提供详细的报名信息,包括团队介绍、机器人技术参数等。
2. 比赛场地比赛场地分为室内和室外两种类型。
室内场地为标准的搬运场景,包括楼梯、过道、障碍物等;室外场地则更具挑战性,可能存在不平整的地面和复杂的环境条件。
参赛者可以根据自身机器人的特点选择适合的场地进行参赛。
3. 比赛任务比赛任务分为基础任务和高级任务两大类。
基础任务主要包括物品搬运、避开障碍物、跨越不同高度等;高级任务则要求机器人具备更高的智能和多功能性,比如寻找指定位置、识别特定颜色等。
参赛者可以自由选择参与哪些任务,但最终成绩将综合考量基础任务和高级任务的完成情况。
4. 时间限制每个比赛项目都有时间限制。
参赛者需在规定的时间内完成尽可能多的任务,并在规定时间结束前将机器人停在指定区域。
超时将会导致相应的罚分,最终成绩将减去罚分。
5. 评分标准评分标准根据完成任务的准确性、速度和稳定性来衡量。
参赛者的机器人应准确地完成指定的任务,并在最短时间内完成。
同时,机器人在执行任务时应保持稳定,不发生故障或意外情况。
评委会根据参赛者机器人的表现给出相应的评分,最终冠军将根据得分确定。
6. 安全规定安全是比赛的重要考虑因素之一。
参赛者需确保机器人的设计符合安全要求,并采取相应的安全措施,以确保比赛过程中不对参赛者和观众造成伤害或损害。
如有安全违规情况,将会取消参赛资格或受到相应的处罚。
7. 复赛与决赛比赛分为初赛、复赛和决赛阶段。
初赛是对参赛者机器人的基本性能和功能进行评估;复赛则进一步挑战机器人的智能和灵活性;决赛是最后的巅峰对决,选出最终的胜者。
中国机器人大赛规则
中国机器人大赛规则中国机器人大赛是我国一年一度举行的盛大赛事,旨在推动机器人领域的科学研究和技术创新。
本文将介绍中国机器人大赛的规则和参赛要求。
一、参赛资格1. 参赛者必须是中国公民或在中国合法居住,不限制参赛人数。
2. 参赛队伍需要有一个指导教师或导师,并具备相关科研背景或专业知识。
二、赛事组别中国机器人大赛包括多个赛事组别,旨在展示不同领域机器人的技术应用和创新成果。
1. 机器人舞蹈:参赛者需要设计和编程一个舞蹈表演机器人,展示其协调和灵活的舞蹈动作。
通过舞蹈演示评委会对机器人舞蹈技术进行打分。
2. 人机协作:参赛者需要开发具有人机协作能力的机器人系统,能够与人类完成特定任务。
评委会将根据任务完成的质量和效率对参赛机器人进行评分。
3. 智能家居:参赛者需要设计和制造一个智能家居控制系统,能够远程监控和控制各种家居设备。
评委会将根据系统性能和用户体验对参赛作品进行评审。
4. 仿生机器人:参赛者需要设计和制造仿生机器人,并模仿人体的运动和功能。
评委会将根据仿真程度和机器人性能对参赛作品进行评分。
三、评委评分标准评委会将根据以下几个方面对参赛作品进行评审:1. 技术创新:参赛作品是否具备创新性的技术应用和解决方案。
2. 功能完善:参赛作品是否能够准确、高效地完成相应任务。
3. 性能稳定:参赛作品在各种环境和条件下是否具有稳定的性能和可靠性。
4. 用户体验:参赛作品是否能够提供良好的用户体验和使用便利性。
四、赛事安排中国机器人大赛通常会分为初赛和决赛两个阶段进行。
1. 初赛阶段:参赛队伍需要提交相关项目资料和作品视频,由评委会进行初步评审。
通过初赛的队伍将进入决赛阶段。
2. 决赛阶段:参赛队伍需要将制作的机器人和相关设备带到决赛现场进行现场展示和演示。
评委会将根据现场表现对参赛作品进行最终评审。
五、奖项设置中国机器人大赛设有多个奖项,包括一等奖、二等奖、三等奖等。
评选获奖作品时,将同时考虑机器人的技术水平、创新性、功能完善性以及用户体验。
2012中国教育机器人大赛“机器人游深圳”中学组比赛规则
2012中国教育机器人大赛“机器人游深圳”中学组比赛规则(Ver:1.0)中国教育机器人大赛技术委员会2012-8一、 比赛简介比赛目的设计一个基于单片机的小型轮式机器人从起始点出发到达目的地。
参赛机器人按比赛场地道路轨迹移动,在规定时间内,游历尽量多的景点,获得尽量多的分数。
在游历完所有景点后回到出发地。
比赛内容与任务“机器人游深圳”竞赛项目要求参赛机器人在规定时间内,从出发点出发“OPEN 起始站”游历尽量多的景点,并最后返回起点。
机器人类型 时间轮式机器人 180秒二、 比赛规则1.比赛场地①比赛场地为长2000mm×1500mm的长方形区域,底部为绿色。
比赛地图材料:为广告灯布,参赛队可以直接将场地地图拿到广告公司直接喷绘,也可以从技术委员会指定的厂家购买。
②道路是由有宽度约2.2cm的黑色引导线用以引导机器人循迹的。
比赛机器人从“出发区OPEN”区域出发,上面布有黑色导引线。
2.比赛区域标识:景点介绍牌材料:有机玻璃板,尺寸:120mm3.每支代表队参赛机器人数量每支代表队参赛机器人数量为1~2台,比赛次数为2次,每次只允许1台机器人比赛,取成绩最好的一次计分。
4.比赛机器人要求:为了公平公正的比赛,本次比赛对参赛队使用的机器人做了如下规定①控制器要求:可以使用任何型号的控制器芯片进行比赛。
②参赛机器人只限定使用舵机轮式移动机器人。
③参赛机器人必须带有面包板,传感器电路要在面包板上体现并实现。
④机器人尺寸:机器人在地面投影不超出:长220mm×宽140mm。
⑤机器人重量:≤500g。
⑥在规则满足规则的前提下,可以对机器人的机械和传感器进行扩展。
5.景点得分要求①共有15个固定景点,所有固定景点都在其所处道路的尽头,所有景点的分值相同,为1分。
②到达固定景点的标志是,比赛机器人(包括所携带传感器或零件)有明显碰触景点介绍牌的行为,就认为机器人已游览了此景点。
(比如使用触须传感器碰撞,当碰撞到景点介绍牌时,有掉头或是转向行为)三、规则与裁判每场比赛将委派两名裁判执行裁判工作,一名技术裁判,一名计时裁判。
机器人大赛规则

机器人大赛规则1. 比赛概述机器人大赛是一项旨在展示机器人设计与操作技术的比赛。
参赛者需要通过编程和机械设计来控制自己的机器人完成一系列任务。
比赛的目的是鼓励参赛者展示技术创新、合作精神和工程能力。
本文档将详细介绍机器人大赛的参赛规则,包括参赛资格、赛程安排、比赛任务、机器人规格和评分标准等内容。
2. 参赛资格2.1 参赛者必须年满18岁,并拥有合法身份。
2.2 参赛者需要组成一个团队,每个团队至少包含两名成员。
3. 赛程安排3.1 报名阶段参赛者需要在指定时间内进行报名,提交参赛团队的信息和机器人设计方案。
3.2 选拔赛所有报名的团队都将参加选拔赛。
选拔赛中,每个团队将有限定的时间来展示自己的机器人,并完成一些简单的任务。
选拔赛的目的是筛选出最有潜力的团队。
3.3 决赛选拔赛结束后,进入决赛阶段。
决赛中,参赛团队将面对更加复杂和具有挑战性的任务。
最终,评委会将根据各个团队的表现决定获胜者。
4. 比赛任务4.1 机器人操控参赛团队需要使用编程语言控制机器人,使其完成指定的动作和任务。
机器人的操控需要快速、精准和稳定,以达到最佳表现。
4.2 任务难度比赛任务将会逐渐增加难度,挑战参赛团队的技术和创新能力。
任务涵盖多个领域,包括机械设计、传感器应用、图像识别等。
4.3 时间限制每个任务都有时间限制,参赛团队需要在规定的时间内完成任务。
如果超出时间限制,将会受到相应的扣分或淘汰。
5. 机器人规格5.1 尺寸限制机器人的尺寸必须在规定范围内,超出范围的机器人将不被允许参赛。
5.2 安全性机器人必须具有一定的安全性能,不得对其他参赛团队或观众造成伤害。
机器人设计中需要考虑到防护装置、应急停机等安全措施。
5.3 能源机器人可以使用电池、太阳能等能源,但必须符合安全规范,并且不得对比赛场地造成污染或危险。
6. 评分标准6.1 任务完成度参赛团队完成任务的质量和数量将直接影响评分。
任务完成得越好,得分越高。
6.2 创新性参赛者可以通过独特的创新和技术手段来提高机器人的性能和表现。
2023中国机器人大赛规则

2023中国机器人大赛规则引言:2023中国机器人大赛是一项全国性的机器人竞赛活动,旨在推动机器人技术的发展与创新。
本文将介绍该比赛的参赛规则及相关要求,详细阐述参赛机器人的要求、比赛项目及评分标准,以及比赛的组织与管理等内容。
一、参赛机器人要求1.1 外观要求:参赛机器人的外观应符合机器人设计规范,不得有尖锐边角或对人体造成伤害的部件。
机器人外观的美观性和创意性将作为评分因素之一。
1.2 机器人尺寸与重量:机器人的尺寸和重量应符合规定范围,以确保比赛的公平性。
具体的尺寸和重量要求将在比赛规则中详细说明。
1.3 机器人动力系统:机器人的动力系统可以采用电池、气体、液体等不同形式,但必须符合安全性要求。
机器人的动力系统应稳定可靠,以确保比赛的正常进行。
1.4 控制系统:机器人的控制系统可以采用有线或无线方式,但必须确保控制信号的稳定传输和响应速度。
二、比赛项目及评分标准2.1 比赛项目:2023中国机器人大赛将设立多个比赛项目,包括机器人足球、机器人舞蹈、机器人抓取等。
每个比赛项目的规则和要求将在比赛手册中详细说明。
2.2 评分标准:机器人在比赛中将根据不同项目的评分标准进行评分。
评分标准将综合考虑机器人的功能、性能、创新性、稳定性等因素,并给予相应的分值。
评分标准将在比赛手册中明确列出。
三、比赛组织与管理3.1 比赛组织:2023中国机器人大赛将由中国机器人协会主办,各地区机器人协会承办。
比赛将分为预赛和决赛两个阶段进行,预赛将在各地区同时进行,决赛将在全国范围内进行。
3.2 比赛规则:比赛规则将由中国机器人协会制定,确保比赛的公平性和规范性。
规则将明确参赛机器人的要求、比赛项目的规则、评分标准等内容,并对违规行为进行相应的处理措施。
3.3 安全与保障:比赛组织方将确保比赛场地的安全与保障工作,包括现场设备的安全性检查、应急救援措施的准备等。
参赛队伍应遵守比赛场地的安全规定,确保比赛过程的安全顺利进行。
机器人竞赛规程

机器人竞赛规程1. 竞赛背景机器人竞赛是一项旨在促进技术创新和团队合作的活动,通过设计、制造和操作机器人来完成特定任务的挑战。
机器人竞赛不仅可以提高参赛者的技术水平,还有利于培养团队合作意识和解决问题的能力。
2. 参赛资格2.1 参赛资格开放给所有对机器人竞赛感兴趣的个人或团队。
2.2 参赛者需年满18岁,或者由一名成年监护人陪同参赛。
2.3 每个参赛队伍最多可由5名成员组成,参赛队伍需指派一位队长负责统筹工作。
3. 比赛规则3.1 比赛项目由主办方提前公布,包括任务描述、使用材料、规则等。
参赛队伍需根据规定时间和要求设计、制造机器人。
3.2 机器人需符合主办方提供的尺寸和重量限制,同时需要具备必要的遥控或自主控制功能。
3.3 参赛队伍可自行选择控制方式,包括遥控器、计算机程序等。
但遥控设备不得操控机器人完成任务,仅用于控制机器人的基本操作。
3.4 比赛中,机器人所使用的零部件必须合法、安全、公平,并且只能使用主办方指定的材料和设备。
3.5 参赛队伍需在规定时间内将机器人交给主办方检查和审核,确保机器人符合要求。
3.6 比赛期间,参赛队伍需遵守现场的指引和要求,保持公平、诚实的竞争态度。
3.7 参赛队伍如发现其他参赛队伍有作弊行为,应立即向主办方报告。
主办方将对举报进行调查,并在必要时对有作弊行为的参赛队伍进行处罚。
4. 比赛流程4.1 报名阶段:参赛队伍需在规定时间内完成在线报名,并缴纳报名费用。
4.2 赛前准备:主办方提供比赛规则和任务要求,并且发布参赛队伍名单。
参赛队伍需在规定时间内准备机器人并进行调试。
4.3 比赛阶段:比赛按照设定的时间和赛程进行,参赛队伍需按照规定的顺序完成任务。
每个任务的得分将根据完成情况和所用时间进行评定。
4.4 颁奖仪式:比赛结束后,主办方将对各个项目的获奖队伍进行表彰和奖励。
5. 安全措施5.1 参赛队伍需确保机器人操作过程中的安全,包括但不限于保证机器人的稳定性,避免对他人和物品造成伤害。
机器人搬运赛比赛规则
机器人搬运比赛规则一、比赛主题:“机器人搬运”任务主要模拟运输队伍的活动项目。
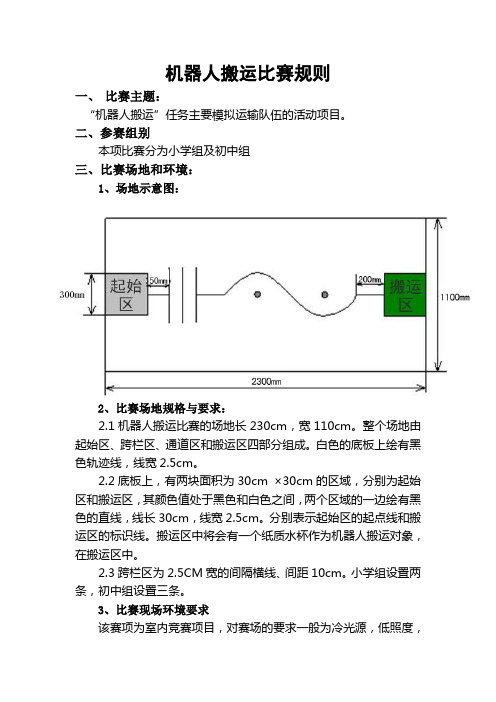
二、参赛组别本项比赛分为小学组及初中组三、比赛场地和环境:1、场地示意图:2、比赛场地规格与要求:2.1机器人搬运比赛的场地长230cm,宽110cm。
整个场地由起始区、跨栏区、通道区和搬运区四部分组成。
白色的底板上绘有黑色轨迹线,线宽2.5cm。
2.2底板上,有两块面积为30cm ×30cm的区域,分别为起始区和搬运区,其颜色值处于黑色和白色之间,两个区域的一边绘有黑色的直线,线长30cm,线宽2.5cm。
分别表示起始区的起点线和搬运区的标识线。
搬运区中将会有一个纸质水杯作为机器人搬运对象,在搬运区中。
2.3跨栏区为2.5CM宽的间隔横线、间距10cm。
小学组设置两条,初中组设置三条。
3、比赛现场环境要求该赛项为室内竞赛项目,对赛场的要求一般为冷光源,低照度,无磁场干扰,但也不排除有外部的各种干扰。
建议各参赛队要做好防干扰的各种准备,按规定做好热身及环境因素的测定。
四、机器人设计与器材要求:1、本比赛项目的机器人套装或散件不做任何限定。
2、机器人最大原始尺寸:长30cm,宽25cm,高不限。
3、每个参赛队比赛时将使用一个机器人去完成任务,机器人限定使用1个可编程处理器;马达数量不超过4个;传感器不超过3个;其它用于结构搭建的材料不限;机器人部件之间的衔接可以使用胶水、螺丝钉等材料进行固定。
4、各参赛队必须对参赛机器人进行个性化设计,机身上要有明显的本队标志。
5、各代表队须自备竞赛所需的机器人套装器材,并带齐常用工具、电源接线板、转换插头等。
如各代表队有手提电脑推荐自带。
五、比赛任务说明1、评定标准:记录机器人完成全部任务的时间。
机器人如果在搬运赛过程中脱离轨迹运行,则为任务失败,不再记录当次比赛成绩。
2、成绩记录:两轮比赛以完成任务时间最短的一次作为参赛队伍的比赛最终成绩。
3、任务分值:机器人从起始区出发,穿过跨栏区,进入通道区,然后进入搬运区,把搬运区的搬运物再从搬运区搬运到起始区的为完成全部总体任务,从起始区出发到跨过跨栏区得15分,顺利通过通道区到达搬运区得到15分,成功搬起物体得10分,成功把搬运物运回到起始区得40分,总体任务的时间得分20分,只有顺利完成全部任务的方可得到相应的时间得分。
智能搬运机器人比赛规则

附件4:分拣机器人(智能搬运机器人)比赛规则1、比赛目的设计一个轮式或人形小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置。
比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。
它模拟了工业自动化过程中自动化物流系统实际工作过程。
2、比赛内容及任务项目1 :规定项目比赛比赛任务:在规定时间内,机器人完成物料的分类搬运,并回到出发点。
比赛分组:根据电机转速分为舵机组和无差别组,每组细分为轮式机器人和人形机器人两个组别。
机器人从出发区出发,到达物料储存区后,分拣其赛前抽签决定好的任务,即从5个预知颜色料块(黄、白、红、黑、蓝)选3种颜色料块的已知6种组合(任务)中,选其中1个作为比赛任务(其料块均要求摆放在场地图的A、C、E位置,B、D位置不放置物料,场地图参见比赛规则一:比赛场地),再按照设计好的控制策略控制机器人动作,以便将三个料块快速准确地搬运到对应的三个颜色中心区域内,最后回到出发区。
项目2 创新创意赛根据是否使用面包板分为标准平台组和无差别组,其中标准平台组作品必须使用至少一块面包板且可进行现场插线操作。
参赛队在不破坏场地并在场地范围内,可充分利用场地,自主选择场景、机器人等,进行创新创意演示。
可添加一定的辅助器件。
3、比赛规则规则一比赛场地规则1.1 尺寸比赛场地为正方形规则1.2 场地区域及标识比赛场地用直线、圆及数字进行标识。
详见图1、图2、图3。
图1 场地立体示意图图2 场地平面示意图(带安全边界)图3 机器人出发区规则二比赛用料块使用5个直径为40、高度为40的料块,颜色分别为黄色、白色、红色、黑色、蓝色。
制作方法(推荐):先准备外径为40,高度为40的白色PVC 水管,在中间填充泡沫后,侧面用喷绘不干胶贴装即可。
规则三场上机器人的数量每支参赛队可同时使用1至3个机器人(最多不超过三个)参加比赛,在比赛前,各个参赛队需要对于机器人进行登记标识。
机器人搬运比赛

机器人搬运比赛1、比赛内容机器人从出发点分拣3个不同颜色的圆形物料,物料尺寸Φ40×40mm,物料材质为泡沫塑料,机器人将3个物料按照比赛现场抽签的颜色顺序放置在对应颜色的同心环区域。
2、比赛任务比赛场地上有三个不同颜色(蓝、红、黄)的得分区域,机器人按照现场抽签的顺序出场比赛。
机器人按照自已的策略顺序将三个色块放到对应的三个颜色区域内,并最后回到出发区。
比赛任务为:机器人在规定的5分钟内,准确放置色块,并回到出发点。
机器人可以在规则内扩展多种传感器来对机器人的比赛进行精确的控制以求更好的成绩。
3、比赛规则(1) 比赛整个过程中不能有人为干涉机器人完成比赛任务,一旦机器人启动则必须自主完成比赛任务,如果有人为帮助则比赛得分为0。
(2) 参赛队伍为单个机器人参加比赛,每个机器人有3次比赛机会,分3轮进行,取三轮比赛中取得的最高分值作为该机器人的比赛成绩。
(3) 每个机器人在第一轮比赛开赛前有20分钟准备时间,一旦裁判宣布比赛开始则参赛机器人的比赛时间不能超过5分钟。
超过5分钟的按照5分钟之内的结果计算成绩。
(4) 分拣得分原则:物料必须与机器人脱离,才能计算分数。
比赛终止时刻,尚在移动的色块,不计算得分。
(5) 回到出发点得分原则:比赛终止时刻,机器人有一个轮子与地面的接触点在出发区域内,并且机器人已经停止动作,则算已经回到出发点。
参赛队员可以口头通知裁判提前终止比赛。
(6) 比赛中各队之间不得互相借用机器人,若有借用,即取消2队的比赛成绩。
(7) 色块放置原则:比赛开始前由裁判在场地正中心的物料存储区圆环内的一、二、四象限内各放置1个Φ40×40mm的色块,颜色分别为蓝色、红色、黄色。
各种颜色的色块摆放的具体象限将在比赛开始之前由抽签决定(色块摆放的具体象限共有5种组合,按四、一、二象限的顺序分别为:A、红蓝黄,B、黄红蓝,C、黄蓝红,D、蓝黄红,E、红黄蓝)。
裁判在放置色块时应保证色块不与周围的黑线相接触。
2018 第八届中国教育机器人大赛"人工智能技术应用- 智能物流系统"比赛规则(大学高职组)

2018第八届中国教育机器人大赛 "人工智能技术应用-智能物流系统"比赛规则Version: 1.0(大学高职组)中国教育机器人大赛技术委员会2018年8月一、比赛简介1.比赛目的设计一个基于STM32平台(STM32F103VCT6 32位单片机)小型轮式物流机器人,配合高精度多功能桌面机械臂,用来进行和工业4.0相关的机器人应用和人工智能技术应用-智能物流系统,模拟工厂自动化生产物流系统工作。
2.比赛内容与任务“人工智能技术应用-智能物流系统”竞赛项目要求参赛机器人在规定时间内,用至少4台3.比赛方式各个参赛队到裁判处抽签决定比赛任务和比赛出场顺序,抽取18个不同的方块,在2个小时的时间内设计搬运控制策略并修改程序控制机器人动作,将18个方块由机械臂准确地放到对应的物流机器人上,再由物流机器人将方块放入指定的仓库,并最后回到结束区域,完成比赛。
二、比赛规则1.比赛场地(见文档结尾的附图)① 比赛场地为长2600mm×3600mm的长方形区域。
比赛时,参赛队只能采用比赛组委会现场提供的地图。
② 地图分几个部分,A区域与B区域以及方块传送部分。
A和B区域虚线段内为参赛机器人起始区,仓库T型入口处有放置电子标签卡,A1-A7和B1-B7为仓库名称。
方块传送部分由方块箱、传送带及机械手组成,传送带的两端放置机械臂。
灰色实线之间是传送带和机械臂放置区域③ 地图上的循线道路由宽度约2cm的黑色引导线组用于引导机器人循迹。
比赛机器人从出发/结束区域出发。
注:方块摆放顺序由裁判抽签得到的比赛任务决定,机械臂以及方块与方块之间的距离不作要求,可由参赛队自行设定。
例如,假设抽到的比赛任务是A-B-A-B-A-B-A-B-A-B-A-B-A-B-A-B-A-B,放置顺序如下图所示:方块对应的仓库信息被贴在方块底部,所有电子标签卡信息及其对应仓库信息会在抽签后由裁判提供。
2.参赛队员和机器人数量每支代表队由3个参赛队员、至少4台全童物流机器人、2台越疆机械臂、传送带和中央控制板组成,每个机器人比赛1次,需要多台机器人同时协同运行。
教育机器人比赛注意事项和补充规则

教育机器人比赛注意事项和补充规则教育机器人比赛注意事项和补充规则一、预设场地任务模型位置抽取说明1、2019年科协场地预设任务模型共12个,分别是图灵鸟、搬运能量块、处置概率、智能拾取、抽取信息、立体车库、获取深度学习样本、信息采集、特征匹配、剔除重复数据、加载能源反应堆、无人驾驶。
2、其中图灵鸟、搬运能量块、处置概率、智能拾取四个任务模型按照规则要求随机抽签摆放在可变位置一到可变位置五当中的四个位置上,剩余的位置是机器人上楼的位置。
抽取信息和立体车库的位置固定但方向可以改变,抽取信息的方向1和方向2以及立体车库的方向1、方向2、方向3须现场抽签决定。
3、获取深度学习样本、信息采集、特征匹配、剔除重复数据、加载能源反应堆、无人驾驶的位置按照规则要求随即抽签摆放在可变位置六到可变位置十四。
其中无人驾驶、特征匹配、剔除重复数据、加载能源反应堆的模型方向只能是数字1。
获取深度学习样本、信息采集模型的方向根据规则要求按现场随即抽签决定。
二、附加任务模型位置抽取说明1、市赛和省赛赛事,附加任务中智能分拣和智能运输的位置与方向是固定的,分别位于抽取信息模型位置两侧的虚线框处。
2、智能分拣的九个方形环的摆放顺序由现场3位学生抽签决定。
3、智能运输需要放置方块的运输框的编号由现场4位学生抽签决定。
综合技能比赛注意事项和补充规则竞赛场地变量:在科协竞赛场地包中对应编号,由在场学生抽取。
竞赛任务数量:综合技能竞赛共有规定任务8个,本次竞赛高中抽取一个任务,初中抽取一个任务,小学抽取两个任务。
竞赛任务变量:位置及方向,经全体参赛队员公正,由现场裁判员抽签选取决定。
最后成绩取三轮竞赛成绩之和。
FLL工程挑战赛注意事项和补充规则根据比赛时间及场地的实际情况,现就本届竞赛中FLL机器人工程挑战赛项目的场地竞赛规则及赛制做出以下调整:一、赛场与环境1、场地膜是平铺并粘贴在场地上的,以南侧赛纸紧贴比赛场地边框为准,东西场地纸居中。
智能搬运星际迷航规则

智能搬运(星际迷航)一、项目简介普及机器人大赛已经越来越成为江苏省青少年机器人竞赛最为亮眼的内容之一。
其活动对象为青少年学生,要求参加比赛的代表队在比赛现场自行制作机器人、编写程序并进行调试,可以在比赛场地上按照一定的规则要求进行比赛。
以激发青少年对机器人技术的兴趣和爱好,培养其动手、动脑的能力。
二、竞赛主题本届比赛项目的规则主题为“智能搬运”,模仿经典电子游戏“推箱子”而设计。
目的是在训练你的逻辑思考能力。
在一个狭小的仓库中,要求把木箱放到指定的位置,稍不小心就会出现箱子无法移动或者通道被堵住的情况,所以需要巧妙的利用有限的空间和通道,合理安排移动的次序和位置,才能顺利的完成任务。
三、比赛场地与环境1、比赛场地的内部尺寸长为126cm、宽246cm,场地上有横4竖8 ,宽为2.54cm的黑色引导线,整个场地外围有5-8厘米的围框。
2、场地由手动区域、自动区域组成。
示意图中橙色竖线左侧为手动区,机器人在此区域内手动遥控完成任务;右侧为自动区,机器人在此区域必须自动控制完成任务。
自动区域和手动区域衔接位置为起始区和修整区(黄色位置),大小为25x25x25cm的一个空间范围,可以对机器人进行位置的摆放、结构休整或程序进行切换。
3、红色位置为终点区。
4、在手动区域内放置两种大小的木制方块代表得分物。
小方块尺寸为长50mm,宽50mm,高50mm,(如图1)数量为6-12个。
(小学组6个,初中组9个,高中组12个)大方块尺寸为长100mm,宽100mm,高50mm,(如图2)数量为2-4个。
(小学组2个,初中组3个,高中组4个)(图1 )(图 2)5、小方块的得分区为2.4cm高,长宽为12cm的正方格围栏(图3),需要通过夹取的方式放入(扫、推、撞、铲等方式进入得分区均视为无效),小方块与底面接触即为得分。
大方块可由机器人直接推动进入得分区域(图4)。
(图 3 )(图 4 )四、组别组别为小学、初中、高中三个组别五、任务及得分1、机器人的体积以静态放置时,所有可伸展的部分都不能超出基地的空间范围为准,即25x25x25cm的立方空间。
教育机器人智能搬运比赛项目要求和评分标准

教育机器人智能搬运比赛项目要求和评分标准(总5页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2016中国教育机器人大赛机电工程学院选拔赛“智能搬运”比赛规则2016-10-17一、比赛简介1.比赛目的设计一个基于 AT89S52 单片机或者 STM32 单片机的轮式移动机器人,比赛场地里移动,在将不同颜色、形状或者材质的物体分类搬运到对应的分数位置。
比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。
它模拟了工业自动化过程中自动化物流系统实际工作过程。
2.比赛任务机器人从出发区出发,到达物料储存区后,分拣其赛前 1 小时抽签决定好的任务,即将 5 个不同颜色的色块快速准确地搬运到 5 个对应颜色的中心区域内,最后回到出发区。
注意:所有参赛队及其队员都是同一个搬运初始位置,初始位置上的色块是由参赛队员代表从暗箱中随机抽取决定。
二、比赛规则1.比赛场地FIH G智能搬运比赛场地1RC-1. 材质及表面要求说明场地规格说明直接采用比较平整的地面或者桌面即可,只要承重能力在 100Kg 以上。
比赛场地由比赛组委会统一提供,不能使用参赛队自己带来的场地。
各种颜色和线条用计算机彩色喷绘的形式产生。
参赛队训练场地可以从技术委员会指定的厂家购买。
场地为边长 1500mm(不含安全边界)的正方形。
1、绿色区域为参赛机器人出发区域。
2、 A、B、C、D、E这 5个位置为物块初始放置位置,其中 A、B、C、D、E 五个位置位于黑色引导线上,位置处有白色空心标示。
3、黄、白、红、黑、蓝这 5 个位置及其周围标示精度的环区为目标区域,也称靶位,精度环区标示从 1 环到 10环。
不做特别要求,只需普通室内环境和荧光灯即可,但不可以有阳光直射。
比赛是,场地外围观人员不能使用闪光灯进行拍照。
2.色块使用直径为 40mm,高度为 40mm 的圆柱形料块,重量在 100 克以内,共 5 个,颜色分别为黄色、白色、红色、黑色、蓝色。
918388-WER2020竞赛-智能搬运—”熊猫乐园“竞赛规则-001
智能搬运小学组一、竞赛目的四川是熊猫的故乡,大熊猫栖息地被联合国教科文组织指定为世界自然文化遗产。
大熊猫号称“竹林隐士”,它们生性孤僻,每只大熊猫都有自己的生活领地, 争夺生活领地成为野生大熊猫基本的生存技能。
本赛题为“熊猫乐园”,主题以大熊猫争夺生活领地为原型,机器人(代表大熊猫)搬运圆柱状的竹笋(代表领地标记物)去标记领地里的竹子。
每支战队参赛队员数量为1 人,指导老师1 人。
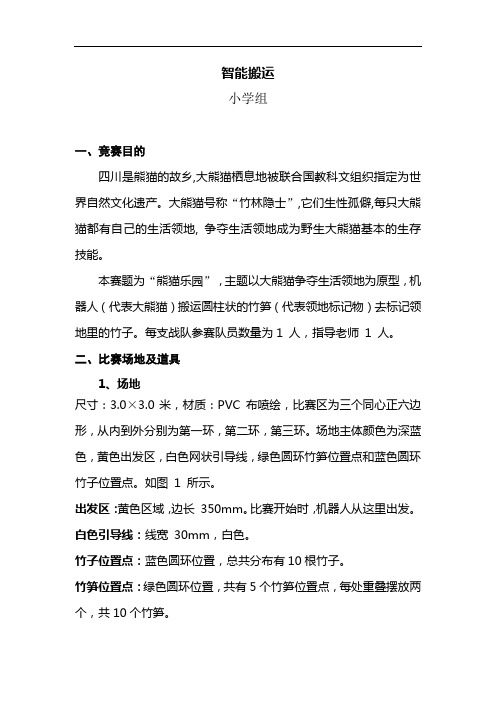
二、比赛场地及道具1、场地尺寸:3.0×3.0米,材质:PVC 布喷绘,比赛区为三个同心正六边形,从内到外分别为第一环,第二环,第三环。
场地主体颜色为深蓝色,黄色出发区,白色网状引导线,绿色圆环竹笋位置点和蓝色圆环竹子位置点。
如图1 所示。
出发区:黄色区域,边长350mm。
比赛开始时,机器人从这里出发。
白色引导线:线宽30mm,白色。
竹子位置点:蓝色圆环位置,总共分布有10根竹子。
竹笋位置点:绿色圆环位置,共有5个竹笋位置点,每处重叠摆放两个,共10个竹笋。
图1 熊猫乐园比赛场地2、场地道具竹子:利用脚杯制作,材质不锈钢,总高105mm,底座直径约100mm,底部用胶水或双面胶粘在地图上固定。
竹子尺寸和效果图如图2 所示。
图2 脚杯实物图和竹子制作效果图竹笋:PVC 管材质,外直径50mm,高50mm,每个摆放点重叠摆放2 个,表面贴绿色PVC 贴膜。
竹笋的尺寸和效果图如图3所示。
图3 竹笋实物图三、机器人尺寸及其他要求比赛入场时,机器人尺寸必须限制在300mm(长)×300mm (宽)×300mm(高)以内。
比赛开始后,机器人形状可以改变。
在比赛期间,机器人不可以分离,用软绳连接的机器人被视为两个机器人。
1、对机器人的重量不作限制。
2、所有电源电压均不得高于10V。
3、传感器数量不超过4个。
4、电机数量不超过4个。
四、比赛比赛时间:每场比赛时间为150秒。
标记竹子的要求:将至少一个竹笋套在竹子上则算标记成功。
自动搬运分拣机器人比赛方案

自动搬运分拣机器人比赛方案一、赛事背景自动搬运分拣机器人作为现代制造业中关键的技术装备之一,其在提高生产效率、减少人力成本、提升智能制造水平等方面发挥着重要作用。
为进一步推动机器人技术的发展和普及,促进机器人应用于实际生产中,本次比赛旨在通过竞技的方式,激发机器人领域的创新潜力,推动机器人技术的提升和普及。
二、比赛内容1. 比赛形式本次自动搬运分拣机器人比赛采用“传统赛事+技术挑战”相结合的形式,包括机器人搬运、分拣、导航等环节。
2. 比赛流程1.报名阶段:参赛队伍进行线上报名,并提交相关资料。
2.设备准备:参赛队伍准备机器人设备,并进行调试。
3.比赛预演:进行预演环节,熟悉比赛规则和场地情况。
4.正式比赛:按照规定的流程进行正式比赛。
5.颁奖典礼:根据比赛结果进行颁奖。
三、竞赛规则1. 赛道设计赛道设置搬运区域、分拣区域和导航区域,确保机器人在各个环节的表现。
2. 机器人要求1.机器人具备搬运、分拣功能。
2.机器人需具备自动导航功能,能够遵循指定路径进行搬运和分拣。
3. 比赛规则1.比赛分为预赛和决赛阶段,根据规则进行比赛。
2.机器人在规定时间内完成搬运和分拣任务,按照规定得分。
3.机器人在比赛中遇到问题需自行解决,裁判可在必要时提供帮助。
四、评分标准1. 完成任务情况根据机器人完成搬运、分拣任务的情况评分,完成越快、准确度越高得分越高。
2. 技术创新程度评估机器人设计中的创新点和技术水平,包括导航系统、传感器应用等方面的创新。
3. 队伍合作表现评价参赛队伍的合作精神和团队协作能力。
五、奖项设置本次比赛设置冠军、亚军、季军以及最佳创新奖、最佳设计奖等奖项,以鼓励参赛队伍在技术创新和设计上的表现。
六、总结通过这次自动搬运分拣机器人比赛,旨在促进机器人技术的发展和应用,激发广大学生和科技爱好者对机器人技术的兴趣,推动机器人技术在生产领域的应用与创新,促进智能制造的发展。
希望这次比赛能够为机器人领域的研究和发展贡献一份力量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011中国教育机器人大赛智能搬运比赛规则(Ver:1.0)中国教育机器人大赛技术委员会2011-5目录比赛简介 (3)比赛目的 (3)比赛内容及任务 (3)项目1 规定项目比赛 (3)项目2 技术挑战赛 (3)比赛规则 (4)规则一比赛场地 (4)规则1.1 尺寸 (5)规则1.2 场地区域及标识 (5)规则二比赛用料块 (6)规则三场上机器人的数量 (6)规则四比赛队员装备 (6)规则五规则与裁判 (7)规则六比赛要求 (7)规则七比赛记分标准 (7)规则7.1 成绩及排名 (7)规则7.2 记分细则 (7)比赛目的设计一个基于8位单片机或ARM控制的小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置。
比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低。
它模拟了工业自动化过程中自动化物流系统实际工作过程。
比赛内容及任务比赛任务为:在规定时间内,机器人分类搬运完毕物料,并回到出发点。
比赛分组:比赛分为大学组和中学组两个大组。
大学组又分为8位单片机组和32位单片机组两个组别。
三个组别的比赛采用统一的比赛任务,但规定使用不同的控制平台,具体规则附后。
项目1 规定项目比赛机器人从出发区出发,到达物料存放区后,分拣其赛前抽签决定好的任务,即从5个预知颜色料块(黄、白、红、黑、蓝)选3种颜色料块的已知6种组合(任务)中,选其中1个作为比赛任务(其料块均要求摆放在场地图的A、C、E位置,B、D位置不放置物料,场地图参见比赛规则一:比赛场地),再按照设计好的控制策略控制机器人动作,以便将三个料块快速准确地搬运到对应的三个颜色中心区域内,最后回到出发区。
项目2 技术挑战赛比赛要求基本同项目1,不同之处在于:参赛队需要从5个预知颜色料块(黄、白、红、黑、蓝)选4种颜色料块的已知6种组合(任务)中,选其中1个作为比赛任务(其料块均要求摆放在场地图的A、B、D、E位置,C位置不放置物料),再按照设计好的控制策略控制机器人动作,以便将四个料块快速准确地搬运到对应的四个颜色中心区域内,并最后回到出发区。
规则一 比赛场地 场地的材质为木质,场地表面最大承重能力100kg ,各参赛队可自行制作,或者直接在采用比较平整的地面即可。
场地表面的材料为亚光PVC 膜,各种颜色和线条用计算机彩色喷绘的形式产生。
参赛队可以从技术委员会指定的厂家购买场地表面材料。
场地的照明要求:赛场的照度为600Lux 到1200Lux 之间,场地上各区域的照度应柔和均匀,各区域照度差不超过300Lux.实际的比赛场地四角会架设各2座20W 、色温4000~6000K 的节能灯,光源高度为2米。
A B CDE规则1.1 尺寸比赛场地为正方形,规定如下:RC1.1尺寸边长为1600mm(不含安全边界),公司提供的场地表面材料为1500mm*1600mm 的长方形。
规则1.2 场地区域及标识比赛场地用直线、圆及数字进行标识。
规定RC1.2.1场地及挡边 比赛区域为1600mm*1600mm正方形区域,底部白色,高度离开地面为100毫米,区域边缘有宽度10mm,高度100mm挡边(即挡边最上沿离地面高度200毫米)。
自行练习时可以不设挡边等。
RC1.2.2 出发区 底部顶点外接机器人出发区,其区域大小为180mm*180mm,里侧布有出发导引线,底部绿色。
RC1.2.3 物料存储区 物料存储区为圆形,直径为500毫米,其中心位于场地正中心,线条宽度为20mm,颜色50%灰色。
用于放置物料。
RC1.2.4同心圆环区(物料搬运目标区) 5个以场地正中心为圆心,距离中心均为400mm的同心等间距圆环组,同心圆轮廓线颜色为50%灰度,线宽2毫米,从圆环(搬运目标区)中心到外围,半径分别为:22.5mm、37.5mm、52.5mm、67.5mm、82.5mm、97.5mm、112.5mm、127.5mm、142.5mm、157.5mm。
同心圆间距分别写10、9、8、7、6、5、4、3、2、1 字体高度10mm,宋体,加黑(除了黑色中心圆10字样为白色外),其中5个中心圆分别图黄色、白色、红色、黑色、蓝色。
RC1.2.5 搬运辅助线 同心圆环中心与出发区前侧中点,均分布在一个半径为400mm的圆周顶点上,圆周上的6个点首尾相连,构成了凸六边形辅助线。
凸六边形顶点与场地中心分别相连,形成了6个等长的辅助线。
辅助线为宽度20mm黑色线,并可用于辅助机器人定位及搬运过程。
RC1.2.6 物料摆放点 为物料存储区圆与搬运辅助直线的5个交点,分别命名为:A、B、C、D、E,在其旁边用白色字体标识出。
RC1.2.7 场地外安全边界 场地周围0.5米处有高400mm、厚10mm的方形白色木质围栏,外形尺寸为:2600毫米×2600毫米。
比赛开始后,白色围栏内不得有人活动。
机器人出发区:绿色边界为180mm×180mm,中间黑色线宽20mm,两边线宽10毫米,间距均为28mm,居中布局。
规则二比赛用料块使用5个直径为40,高度为40的料块,颜色分别为黄色、白色、红色、黑色、蓝色。
推荐制作方法:先准备外径为40,高度为40的白色PVC水管,在中间填充泡沫后,侧面用喷绘不干胶贴装即可。
规则三场上机器人的数量参赛队必须有3个或以上机器人参加比赛,在比赛前,各个参赛队需要对于机器人进行登记标识。
规则四比赛队员装备为了能公平和公正进行比赛,本次比赛对于参赛队使用的机器人做如下规定,以便各个参赛队能在统一的平台上进行比赛。
1、控制器要求,根据参赛队伍学校类型规定使用以下的控制器参加比赛。
①中学组组规定使用BASIC语言编程的BS系列微控制器及其配套的教学板。
②大学组的8位单片机组可以使用各种品牌和型号的8位单片机,优先推荐C51/A VR单片机二合一控制器。
③大学组32位单片机组可以使用各种品牌和型号的32位单片机,推荐使用Cortex-M3 Arm控制器。
④特别要求:为了体现教育机器人大赛的概念和本质,每个参赛队都必须现场搭建及动手装配机器人传感器等,即要求所有控制器上必须带有面包板。
2、要求参加技术挑战赛的机器人必须使用Cortex-M3控制器,以提高整体比赛水平及增加比赛观赏性。
3、只限定使用舵机驱动轮式移动机器人,轮子直径≤80mm。
最大速度60rpm左右。
4、机器人可以在规则允许的条件下,扩展多种传感器来对机器人的比赛进行精确的控制,以求更好的成绩。
5、机器人尺寸:机器人在地面的投影不超出:长280mm×宽140mm。
6、机器人总重量≤ 1000g。
规则五规则与裁判每场比赛将委派两名裁判执行裁判工作,裁判员在比赛过程中所作的判决将为比赛权威判定结果不容争议,参赛队伍必须接受裁判结果。
裁判的责任:1.执行比赛的所有规则。
2.监督比赛的犯规现象。
3.记录比赛的成绩和时间。
4.核对参赛队伍的资质。
5.审定场地,机器人等是否符合比赛要求。
规则六比赛要求比赛场地上有五个不同颜色(黄、白、红、黑、蓝)的得分区域,比赛前1个小时,由裁判通知参赛队对于将要搬运的料块颜色及布局(简称任务)进行抽签,参赛队根据确定的任务进行准备调试,准备调试时间为1个小时。
正式比赛前,所有机器人将统一收回,并摆放在指定区域。
比赛时到摆放区域直接领取相应的机器人参加比赛。
比赛完成再放回摆放地点。
所有比赛结束方可领回机器人。
各个队机器人参赛队也采取按照现场抽签决定比赛出场次序并进行比赛。
每支参赛队伍的比赛时间为15分钟,一旦裁判宣布比赛开始则3台机器人的参赛时间总和不能超过15分钟。
规则七比赛记分标准规则7.1 成绩及排名每个参赛队伍以团体的方式参加比赛,每队由三名机器人队员完成比赛项目,取三名队员的总成绩计算该队成绩来评定参赛队伍的比赛名次。
比赛得分按照精度与速度综合的方式进行评分具体计算方式如下1、每个机器人的精度分值=物体放置好后根据裁判的判定的结果三个颜色位置物料放置的靶位环数相加的总和,以最小直径的包络环数计算成绩。
2、每台机器人总成绩=精度分值+回出发点分值(0或2)。
3、团队总成绩=3名机器人的参赛成绩的总和+奖励分(0或4)。
比赛排名:1、先以比赛团队总成绩计算名次,总成绩高者排名靠前;2、若总成绩一样,则以完成时间决定比赛排名,耗时更少者名次更靠前。
规则7.2 记分细则1、参赛队比赛总分的计算①规定项目比赛:团队满分为100分,每个机器人物料分拣最高得分:3*10(位置精度最高分)+2(回到出发区得分)分即32分,三名队员得分96分,三个机器人都回到出发点奖励4分。
②技术挑战赛赛:团队满分为130分,每个机器人物料分拣最高得分:4*10(位置精度最高分)+2(回到出发区得分)分即42分,三名队员得分126分,三个机器人都回到出发点奖励4分。
2、分拣得分原则:搬运完毕后,物料必须与机器人脱离,才能计算分数。
3、回到出发点得分原则:比赛终止时刻,机器人若有一个轮子与地面的接触点在出发区域内,并且机器人已经停止动作,则算已经回到出发点。
若机器人无法自动回到出发点的,参赛队员可以口头通知裁判提前终止比赛,则回到出发点项记分为零。
4、出现以下的情况,不计算参赛队得分(即得分为零):①参赛队伍为每队3台机器人参加比赛,每台机器人有1次比赛机会,时间5分钟,5分钟内未回到出发点的,则不计得分。
②比赛整个过程中不能有人为干涉机器人完成比赛任务,一旦机器人启动则必须自主完成比赛任务,如果有人为帮助的,则不计得分。
③比赛终止时刻,尚在移动的色块,不计算得分。
④比赛的2个或多个队之间发生互相借用机器人,则不计算相关队的得分。