三相电压型PWM整流器双闭环系统校正方法
三相电压型PWM整流的新型双闭环控制策略
三相电压型PWM整流的新型双闭环控制策略一、本文概述随着电力电子技术的快速发展,三相电压型PWM整流器因其高效率、高功率因数以及优良的电能质量调节能力,在电力系统中得到了广泛应用。
然而,传统的三相电压型PWM整流器控制策略在复杂多变的电网环境下往往难以达到理想的性能。
因此,研究并开发新型的控制策略,以提高整流器的稳定性和动态响应能力,具有重要的理论价值和实际应用意义。
本文提出了一种三相电压型PWM整流的新型双闭环控制策略。
该策略结合了传统的电压外环和电流内环,通过引入一种新型的非线性控制算法,实现了对整流器输出电压和电流的精确控制。
同时,该策略还考虑了电网电压的波动和负载变化的影响,通过动态调整控制参数,保证了整流器在各种工况下的稳定运行。
本文首先介绍了三相电压型PWM整流器的基本原理和传统的控制策略,然后详细阐述了新型双闭环控制策略的设计和实现过程。
接着,通过仿真和实验验证了该控制策略的有效性和优越性。
对本文的研究成果进行了总结,并对未来的研究方向进行了展望。
本文的研究工作为三相电压型PWM整流器的控制策略提供了新的思路和方法,对于提高整流器的性能和稳定性,推动电力电子技术的发展具有积极的意义。
二、三相电压型PWM整流器的基本原理三相电压型PWM整流器是一种能够实现AC到DC转换的电力电子设备,其基本原理基于PWM(脉冲宽度调制)技术和三相电力电子变换技术。
该整流器主要由三相桥式电路、PWM控制器和滤波电路组成。
三相桥式电路由六个开关管(通常是IGBT或MOSFET)组成,分为上桥臂和下桥臂,每相上下各两个开关管。
通过控制这些开关管的通断状态,可以实现AC电源与直流负载之间的能量转换。
当开关管导通时,相应的相线与直流侧正极或负极相连,形成通路;当开关管关断时,相线与直流侧断开。
PWM控制器是整流器的核心部分,负责生成控制开关管通断的信号。
控制器根据输入的电压和电流信号,以及设定的控制策略,计算出每个开关管应该导通的时间,从而生成PWM信号。
三相电压型PWM整流器的新型双闭环控制方法
Electric Power Engineering Technology
第 37卷 第 l期
三 相 电压 型 PWM 整 流器 的新 型 双 闭环 控 制 方 法
朱志键 ,唐 卫 民 (国网无锡供电公司,江苏 无锡 214000)
摘 要 :研 究 了三相 电压 型 PWM 整 流器的 基 于 内模 控 制的 新型 双闭环控 制 策略。其 中 电流 环基 于 内模 解耦控
r J 。 J
+
Zc ,
1
—
a
Z幽
r
Zsc
-J
Udc= 7- 【
C
“c
_
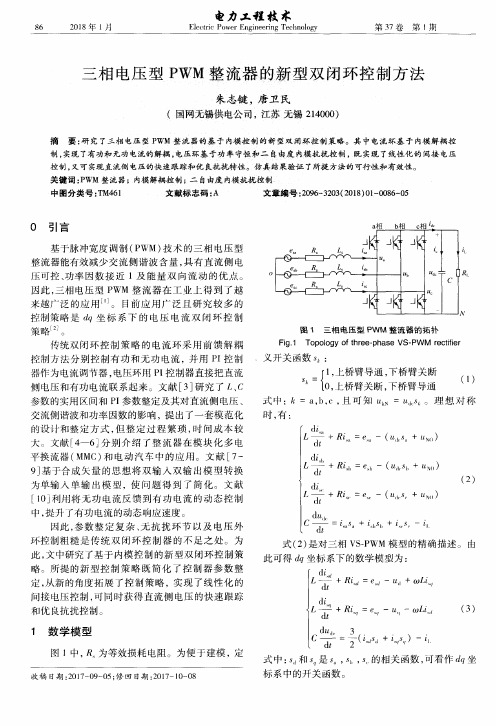
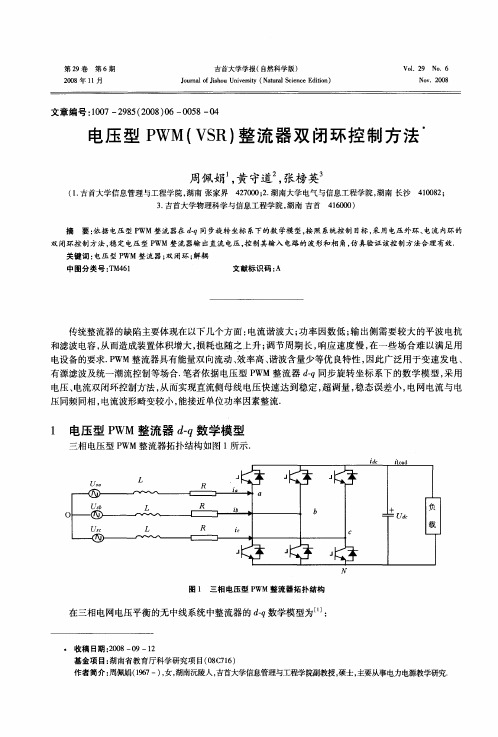
图 1 三相 电压 型 PW M 整 流 器 的 拓 扑 Fig.1 Topology of three—phase VS—PW M rectifier
义 开关 函数 S : f1,上 桥臂 导通 ,下 桥臂 关 断 ,.、
中图分 类号 :TM461
文献标 志码 :A ห้องสมุดไป่ตู้
文 章编 号 :2096.3203(2018)01-0086-05
0 引 言
基 于脉 冲宽 度 调 制 (PWM)技 术 的三 相 电压 型 整 流器 能有 效减 少 交 流侧 谐 波 含 量 ,具 有 直 流 侧 电 压 可控 、功率 因 数 接 近 1及 能 量 双 向流 动 的 优 点 。 因此 ,三 相 电压 型 PWM 整 流 器 在 工 业 上 得 到 了 越 来越 广 泛 的应 用 。。 。 目前 应 用 广 泛 且 研 究 较 多 的 控制 策 略 是 由 坐 标 系 下 的 电 压 电 流 双 闭 环 控 制 策略 。
三相电压型PWM整流器PI调节器参数整定的原理和方法

三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。
最新型三相PWM整流器双闭环PI调节器的设计
最新型三相P W M整流器双闭环P I调节器的设计摘要:通过分析三相脉宽调制(P W M)整流器在D-Q旋转坐标系下的数学模型,设计了具有前馈解耦控制的P W M整流器双闭环控制系统。
根据系统对电流内环的控制要求设计电流比例积分(P I)调节器,提出按闭环幅频特性峰值(M r)最小准则来确定调节器参数的方法;根据系统对电压外环的控制要求,采用模最佳整定法来设计电压P I调节器。
最后对整个P W M整流器双闭环控制系统进行仿真,仿真结果验证了P I调节器设计的正确性。
0引言P W M整流技术在抑制谐波及无功补偿方面有很强的优势,具有网侧电流输入接近正弦,网侧功率因数可控,能量双向传输,动态响应速度快等优点。
目前广泛采用的是基于电压定向的P W M整流器。
电压型P W M整流器要控制的变量有两个,一是整流器的直流电压输出,二是整流器的输入电流,基于D-Q坐标变换的矢量控制通过对P W M整流器有功和无功电流控制,达到控制输入电流的目的。
因此,如何合理的设计控制两个变量的调节器参数以保证在电源电压波动范围内能实现良好的控制性能很重要。
本文在分析P W M整流器工作原理和数学模型基础上,建立前馈解耦控制系统框图,提出电流环和电压环P I调节器参数设计方法,并给出S i mu l i n k仿真结果。
1P W M整流器工作原理及数学模型三相P W M整流器主电路如图(1)所示,E a,E b,E c为电源电压,U a,U b,U c为整流器整流侧输出电压,其中整流器交流侧输入电感L起到滤波和升高直流电压的作用,直流侧电容C作为储能元件并起到稳压作用。
三相P W M整流器在D2q坐标系下的数学模型为:图1P W M整流器电路结构由上式,同步旋转坐标系中,以D轴电源电压矢量定向(矢量图如图2,把对电网相电流的控制转化为对电流I s在D轴和Q轴的直流分量的控制,从而简化了P W M整流系统控制器的设计)的P W M整流器模型为:式中,Ω为旋转角速度;S d,S q为开关函数。
1470-三相电压型PWM整流器双闭环控制策略研究
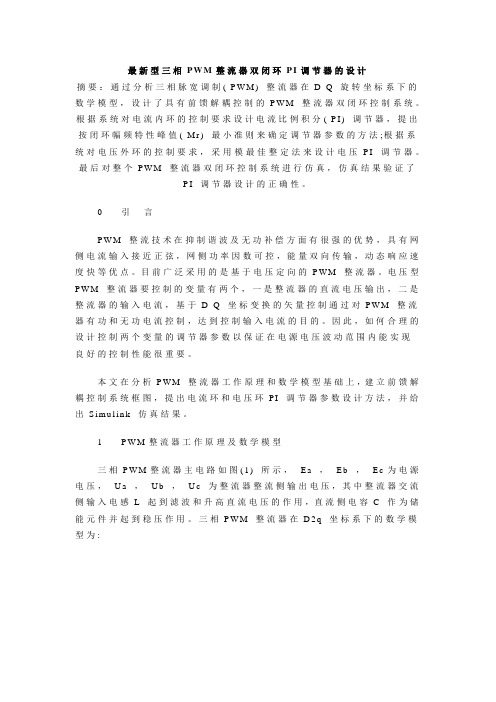
三相电压型PWM 整流器双闭环控制策略研究黄天富,石新春,孙玉巍,王 丹新能源电力系统国家重点实验室(华北电力大学),保定 071003摘 要 本文在分析三相电压型PWM 整流器工作原理的基础上,建立了dq 同步旋转坐标系下三相电压型PWM 整流器的数学模型,推导了一种三相电压型PWM 整流器前馈解耦控制策略,设计了电流内环、电压外环的双闭环控制策略。
该控制策略能有效地抑制网侧输入谐波电流,得到稳定的直流输出电压,同时还具有控制简单、控制精度高等优点。
仿真和实验结果验证了该控制策略的正确性和有效性,系统具有良好的稳态特性和动态特性。
由于控制简单、易于实现,该控制方法具有一定的实用价值。
关键词 PWM 整流器,前馈解耦,双闭环控制1.引言PWM 整流器与传统的不控整流或相控整流方式相比,具有网侧电流谐波含量少、功率因数高、能量可双向流动、动态响应快等优点,成为当今电力电子领域研究的一个热点[1-3]。
因此,研究高性能的PWM 整流器控制策略具有重要现实意义[4-5]。
本文在分析三相电压型PWM 整流器工作原理的基础上,建立了dq 同步旋转坐标系下三相电压型PWM 整流器的数学模型,分别设计了基于前馈解耦控制的电流内环控制器和电压外环控制器。
最后通过仿真和实验验证该控制策略的正确性和有效性。
2.三相电压型PWM 整流器数学模型三相电压型PWM 整流器的原理图如图1示,图1中各物理量定义如下:e a 、e b 、e c 为电网电压,i a 、i b 、i c 为交流侧各相电流,U dc 代表直流侧电压,u a 、u b 、u c 为PWM 整流器交流侧输入电压。
假设三相电网电压平衡,则可得:cos cos(2/3)cos(2/3)a b ce E te E t e E t ωωπωπ=⎧⎪=−⎨⎪=+⎩ (1) 其中E 为电网电压的峰值,ω为电网的角频率。
由图1可列出PWM 整流器的基本方程:0010000a a a a b b b b c c c c di R dt L i e u di R i e u dt LL i e u R di L dt ⎡⎤⎡⎤−⎢⎥⎢⎥−⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=−+−⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥−⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥−⎢⎥⎢⎥⎣⎦⎣⎦ (2) 将上述abc 三相静止坐标系下的PWM 整流器数学模型变换到dq 同步旋转坐标下的数学模型:111d d d d q q q q di i e u R L dt di i e u L R L L L dt ωω⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤−−⎡⎤⎢⎥=+−⎢⎥⎢⎥⎢⎥⎢⎥−⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦ (3) 式中e d 、e q 为电网电动势矢量在d 轴和q 轴上的分量;u d 、u q 为整流器交流侧电压矢量在d 轴和q 轴上的分量;i d 、i q 为整流器交流侧电流矢量在d 轴和q 轴上的分量。
三相电压型PWM整流器PI调节器参数整定的原理和方法
三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。
三相电压源型 PWM 整流器控制

三相电压源型 PWM 整流器控制
电气工程术语
01 背景
目录
02
电压源型整流器的双 环控制方式
03
电压源型整流器的控 制方法
04
电压源型整流器控制 方法的实际应用
05
PWM整流器控制技术 的发展趋势
06 结语
控制技术对提高三相电压源型PWM整流器性能非常重要。根据并交流信号不同,电压源型整流器又可分为电 压控制和电流控制。由于电流控制的方法简单、直接,且具有限流和短路保护作用,因此使用比较广泛。电压源 型整流器的电流控制方案一般采用以直流电压为外环、交流电流为内环的双环控制结构。根据电流内环是否引入 交流电流反馈,可分为直接、间接两种电流控制,由于直接电流控制响应速度快,鲁棒性好,占主导地位。
由于智能控制不需要建立PWM整流器的数学模型,因而也被引入到整流器控制中,但智能控制还很不成熟, 基本还停留在仿真阶段。
虽然现代的非线性和智能两类控制都还不成熟,但随着它们控制技术的进一步发展和逐步成熟,无疑它们具 有良好的应用前景。
PWM整流器控制技术的发展趋势
自20世纪80年代开始PWM整流器研究以来,PWM整流器控制虽已取得了很多成果,但仍不完善。它的发展趋势 大致可归结为以下几个方面 。
结语
三相VIENNA整流器的双闭环控制策略研究

三相VIENNA整流器的双闭环控制策略研究随着工业自动化的不断发展,交流电源整流技术在工业控制领域中得到了广泛应用。
其中,三相VIENNA整流器作为一种比较常见的电源电路拓扑结构,具有功率因数校正和谐波抑制等优点,被广泛应用于电力电子变频调速、激光器电源和无线充电电源等领域。
双闭环控制策略是提高整流器性能、稳定性和响应速度的一种有效方法,本文将对三相VIENNA整流器的双闭环控制策略进行研究。
1.三相VIENNA整流器的基本结构和工作原理整流器的工作原理是在每个半周期内,分别通过A、B、C三个整流单元对输入的交流电压进行整流,输出相应的正半波电压。
通过控制三个整流单元的开通和关断状态,可以实现输出电压的调节和功率因数校正。
2.双闭环控制策略设计双闭环控制策略是将整流器的输出电压和电流分别作为反馈信号,设计两个闭环控制回路进行调节。
其中,电压环控制是通过调节整流器的PWM控制信号来维持输出电压的稳定性和精度;电流环控制是通过调节整流器的开关器件来维持输出电流的稳定性和跟踪性。
电压环控制的设计思路是在输出电压环路中加入PI控制器,根据输出电压与参考电压的差值来调节PWM控制信号。
电流环控制的设计思路是在输出电流环路中加入PI控制器,根据输出电流与参考电流的差值来调节整流器的开关器件。
整体控制框图如下所示:其中,Uref和Iref分别为输出电压和电流的参考值,U和I为输出电压和电流的实际值,Vpwm和SW为PWM控制信号和开关器件,PI为控制器模块。
3.控制系统参数调整和优化在双闭环控制策略中,PI控制器的参数调整和优化是关键。
控制器参数的选择应考虑到整流器的动态响应特性和稳定性要求。
常用的参数调整方法包括试误法、频域法和优化算法。
试误法是通过手动调节参数,观察系统的响应情况,逐步优化参数值。
频域法是基于系统的频率响应特性,通过Bode图和Nyquist图分析系统的稳定性和性能,优化参数值。
优化算法是通过数学优化方法,自动化地寻找控制器参数的最优解。
三相电压型PWM整流器新型双闭环控制策略研究

三相电压型PWM整流器新型双闭环控制策略研究作者:任科明黄辉先胡超来源:《现代电子技术》2015年第01期摘要:针对三相电压型PWM整流器交流侧电感值实际控制系统中存在误差,往往忽略掉耦合项,以及系统参数变化影响整流器的动、静态性能等问题,提出了一种新型的双闭环控制策略。
其中电流内环采用同步旋转d⁃q坐标系下无电感L参数的解耦控制与内模控制相结合的方法,电压外环采用滑模控制,在Matlab中利用Simulink工具箱搭建三相电压型PWM 整流器数值仿真数学模型,数值仿真结果表明系统仍获得了较好的动、静态性能,鲁棒性强。
并通过实验平台验证该控制策略的正确性和优越性。
关键词: PWM整流器;无电感值控制系统;内模控制(IMC);滑模控制中图分类号: TN35⁃34; TM46 文献标识码: A 文章编号: 1004⁃373X(2015)01⁃0115⁃05Abstract: A novel dual closed⁃loop control strategy is proposed in view of the problems that AC inductance value of the three⁃phase voltage⁃source PWM rectifier exists error and often ignores the coupling term in the actual control system, and the change of system parameters affects the dynamic and static performance. The hybrid mode of decoupling current control without exact value of the boost inductor in d⁃q synchronous frame and internal model control is adopted in the current inner loop. The sliding mode control is adopted in the voltage outer loop. The three⁃phasevoltage⁃source PWM rectifier simulation model is build with Simulink toolbox in Matlab. The simulation results show that system can still obtain the excellent dynamic and static performance. And the system robustness is strong. The validity and superiority of the proposed control scheme were verified by experimental results of the physical platform.Keywords: PWM rectifier; no inductance value control system; internal model control;slide mode control0 引言三相电压型 PWM整流器具有网侧电流谐波小、双向电能传输等优势[1],已成为近年来一大研究热点。
PWM整流器的双闭环控制系统设计与仿真研究
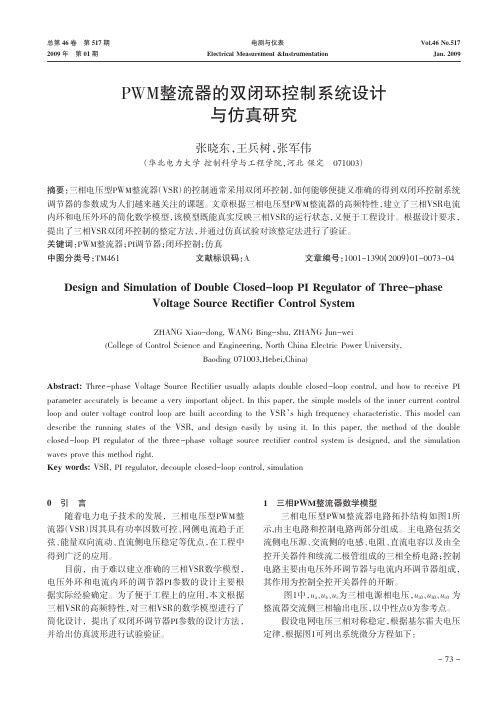
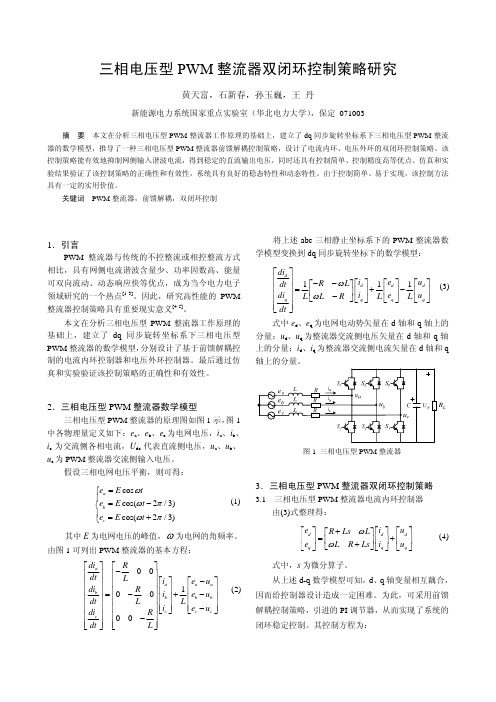
(a)整流器直流侧输出电压
(b)整流器交流侧电压与电流曲线
(c)系统无功与有功的变化曲线
(d)电流跟踪电流给定值的变化曲线
图7 三相VSR双闭环系统响应曲线
Fig.7 Response curves of double closed-loop control of three phase VSR control system
总第 46 卷 第 517 期 2009 年 第 01 期
电测与仪表 Electrical Measurement &Instrumentation
Vol.46 No.517 Jan. 2009
PWM整流器的双闭环控制系统设计 与仿真研究
张晓东,王兵树,张军伟
(华北电力大学 控制科学与工程学院,河北 保定 071003)
for phase a
电流内环闭环传递函数为:
Goi=
Kp L
s+K1/KP
2
s +(R+KP)s/L+KI/L
(4)
式中KP=KiPKPWM,KI=KiIKPWM
(5)
由式(4)求得电流内环阻尼比和自然震荡频率为:
姨姨姨姨ξ=(R+KP)
姨 2 K L 姨姨
%
姨 姨
I
姨
姨 姨
ω = 姨姨
姨
n
%
KI/L
摘要:三相电压型PWM整流器(VSR)的控制通常采用双闭环控制,如何能够便捷又准确的得到双闭环控制系统
调节器的参数成为人们越来越关注的课题。文章根据三相电压型PWM整流器的高频特性,建立了三相VSR电流
内环和电压外环的简化数学模型,该模型既能真实反映三相VSR的运行状态,又便于工程设计。根据设计要求,
三相电压型PWM整流器的系统设计与PI参数校正_王长恺
Ki i * 烄 ( ) [ ) ) ] Ki i s - i s d ( d( p+ s ) i s = d( s L+R ( ) 3 烅 K i i * ( ) [ ) ) ] Ki i s - i s p+ q ( q( s ) i s = q( s L+R 烆 ) , , 式( 表明 在采用前馈控制后 三相 V 3 S R 的电流
内 环 已 经 实 现 解 耦。 由 此 可 得 图 2 所 示 的 三 相 V S R 双闭环矢量控制系统原理图 。
] 出的 C 上限和文献 [ 给出的 C 下限 , 可以综合考 3 虑到直流电压跟随性能和抗扰性能的要求 : 4 L P2 o u t ≤C≤ / 3 Ud Ud Umc o s 2 Ud 3-Um ) Δ c c m a x c φ(
王长恺 , 尹华杰 ( ) 华南理工大学 电力学院 , 广东 广州 5 1 0 6 4 0
三相电压型 PWM 整流器 ( 的系统设计 及 P V S R) I参 数 校 正 是 保 证 其 能 稳 定 工 作 的 前 提 条 件 。 详 摘要 : / 细介绍了三相 V 并在 M S R 系统的设计方案 , a t l a b S i m u l i n k 环境下通过仿真研究了这种 V S R 系统的 P I参数 对直流电压波形的影响 , 提出了一套完整的 、 实用性强 的 系 统 设 计 和 P 用实例说明了这种方 I参 数 校 正 方 法 , 法的具体操作过程 , 并通过仿真验证了其有效性 。 关键词 : 系统设计 ; 参数校正 ; 仿真 PWM 整流器 ; 中图分类号 : TM 4 6 1 文献标识码 : A
用I 且视为理想开关 。 G B T 和续流二极管反并联 ,
三相高功率因数PWM整流器双闭环控制系统设计
三相高功率因数脉宽调制(PWM)整流器具有交流侧输入电流趋于正弦化、功率因数高、直流侧输出电压稳定、能量可以回馈等优点[1-2]。
目前,工程上主要采用动态响应快、控制精度高的直接电流控制方法[3-4]。
但因为难以建立合理的简化数学模型,电压外环和电流内环双闭环串联控制的比例积分(PI)调节参数通常经大量实验凭经验确定。
本文在分析PWM整流器工作原理的基础上,引入电源电压作为扰动补偿,建立其简化数学模型,提出双闭环PI调节参数的设计方法,并给出仿真波形和实验结果。
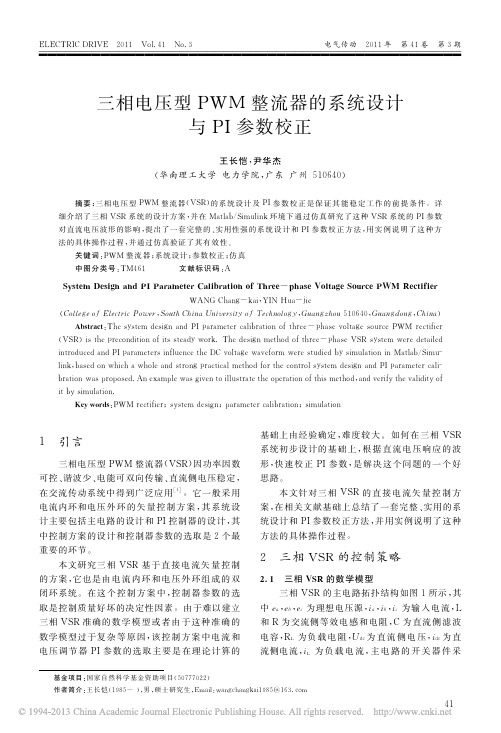
1PWM整流器的电路结构及数学模型三相电压型PWM整流器的电路图如图1所示,由主电路和控制电路2部分组成。
图中,ua、ub、uc为三相电源相电压,upa、upb、upc为PWM整流器交流侧三相输出电压,它们均以三相电源中性点N为参考点;ia、ib、ic为三相电源线电流,参考方向见图1。
不考虑开关状态,由电路可得PWM整流器a、b、c三相的微分方程为Ldiadt=upa-Ria-uaLdibdt=upb-Rib-ub(1)Ldicdt=upc-Ric-uc取拉氏变换,可得PWM整流器a、b、c三相的传递函数:ia(s)=upa(s)-ua(s)Ls+Rib(s)=upb(s)-ub(s)Ls+R(2)ic(s)=upc(s)-uc(s)Ls+R考虑a、b、c三相对称,只给出a相电流内环控制原理框图,如图2所示。
其中,G1(s)为电流调节器传递函数,K0为PWM整流器的放大倍数,与直流侧输出电压有关。
本文取G1(s)为工程中常用的PI串联调节器。
电压外环控制原理框图如图3所示[5]。
图中,G2(s)为电压调节器传递函数;Q(s)为电流内环闭环传递函数;G3(s)为PWM整流器输出传递函数,由主电路参数决定;imref为三相参考电流的幅值,im为三相实际电流的幅值。
本文取G2(s)为工程中常用的PI串联调节器。
图2a相电流内环控制原理框图Fig.2PrinciplediagramofinnercurrentcontrolloopforphaseaG1(s)K0upa1Ls+Riarefupwmauaia电流内环控制部分PWM整流器物理部分-+-+三相高功率因数PWM 整流器双闭环控制系统设计朱永亮,马惠,张宗濂(南京电子技术研究所,江苏南京210013)摘要:引入电压干扰补偿,建立三相高功率因数脉宽调制(PWM)整流器的简化数学模型,该模型既能真实反映PWM整流器的运行状态,又便于控制系统设计。
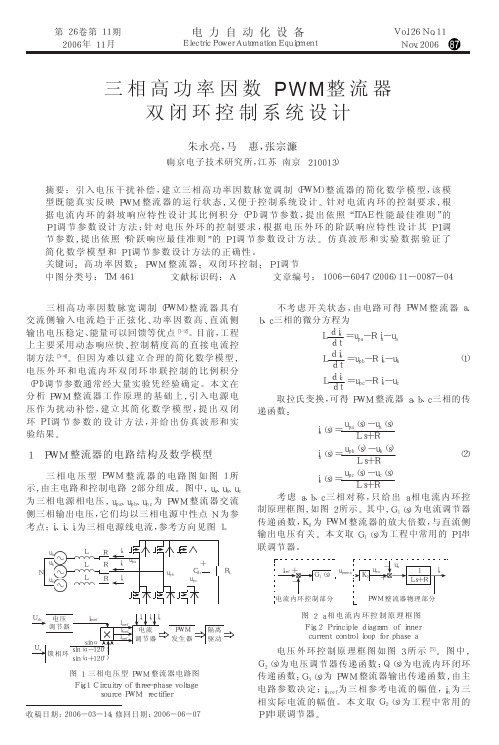
双闭环控制的三相电压型PWM整流器研究
Abs r c : hi pe e e t t e t p l gc l sr t r n t e tc l mo e f t r e — t a t T s pa r pr s n s h o oo i a tucu e a d mah mai a d lo h e —ph s v l g — a e ot e — a s uc o r e PW M e t e .Th e i n o o l l s d —l o o to y tm s i to u e rci r i f e d sg fd ube co e o p c n rl s se i n r d c d,a d t e c n r lsr tg f n h o to tae y o d v la e re t t n a d p c v c o wi t mo u a in i a o t d At l s , t e o to s se o tg o n ai n s a e e tr d h i o d lt s d pe . o a t h c n r l y tm u i g sn DS P
aie te o e a in o ni o rf co n i e o n o n u r n h th sb t rsai nd d n mi h r ce s l h p r to fu t p we a tra d sn fi c mi g c re tt a a e t ttc a y a c c a a t r . z y e Ke wo ds:PW M e tfe ;d u e co e y r r ci r o bl l s d—lo i o p;g i ot g re tto rd v la e o n ai n;DS i P
三相电压型PWM整流器PI调节器参数整定的原理和方法

三相电压源型PWM整流器PI调节器参数整定的原理和方法1引言1.1 PID调节器简介在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
目前,在工业过程控制中,95%以上的控制回路具有PID结构。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。
图1-1 PID控制系统原理图PID控制器传递函数常见的表达式有以下两种:(1)()ip dKG s K K ss=++,Kp代表比例增益,Ki代表积分增益,Kd代表微分增益;(2)1()p diG s K T sT s=++(也有表示成1()(1)p diG s K T sT s=++),Kp代表比例增益,Ti代表积分时间常数,Td代表微分时间常数。
这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。
⏹比例(P,Proportion)控制比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用,以减少偏差。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
⏹积分(I,Integral)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制中必须引入“积分项”。
电压型PWM整流器的双闭环矢量控制策略研究

\ \
步的提 高 。于是 可得 完 全解 耦 的三相 电 压 U 0) 1 WM整 流器 控制 方程 如下 : 关 函数 ,= 代表 上管 通 , S1 下管 关 ;= 代 表下 型 P SO 管通, 上管 关 。 于 相对 称平 衡且 无 中线系 对 图 3 电压 空 问矢量 分布
号 的圆形轨 迹 。
U 0
则 对整 流器 模 型进 行 c r l k变 换 以 及 a 如 照 图 3所 示 的 电压 空 问 矢量 定 义 可 pr ak变换 得 P WM整 流 器 在 d q坐 标 系下 方 知 , 间八个 基本 电压 矢量 u组 成六 边形 , - 空 分
程 :
=S S ^
由于 d 轴 之 间的 电流存 在耦 合 , q 引入 电
+U ̄ v o
流状 态 反 馈
w i , 以 实 现对 d L )可 q轴 电
【o 00
C
i -i : L
流 的解 耦 , 且 引入 电 网扰 动 电压 f b q 并 l U ) d 作 为前 馈补 偿 [— 1 系 统 的 动态 性 能有 进 5 6, 使
控制 。仿真 结果 证 明 了该 方 法的可行 性 ,控 制 系统 具有 良好 的动 、 态响应 能 力 , 流母线 电压 稳 定 , 静 直 实现 了单 位功 率 因数 的 能量 双
向传 输 。
关键 词 : WM 整 流 器 ; 闭环 ; P 双 空间 矢量 ; 解耦控 制 中图 分类 号 : M 6 T 41 文 献标 识码 : A
1概 述 采用 空间 坐标 变换 概 念 ,以输 入 电压矢 量 的 单位 功 率 因数 的 电压 型 P WM整 流 器 由 位置 为 d 正方 向 , 轴 即取 三相输 入 电压为 : 于具 有 网侧 电流 谐波 含量 小 、 功率 因数 高 、 电 l口 m O w “ =U S t C
电压型PWM(VSR)整流器双闭环控制方法
基金项 目: 湖南省教育厅科学研究项 目( 8 7 6 0C 1)
作者简介 : 周佩娟(97一)女 , 16 , 湖南沅陵人 , 吉首大学信息管理与工程学院副教授, 硕士, 主要从事电力电源教学研究
第 6期
周佩娟 , : 等 电压 型 P WM( S 整流器双闭环控制方法 V R)
dr i d
.
和 电 网电压
由( )式 可 以看 出 ,, 电流除受 控 制量 “ , 的控制 外 , 受耦 合 电压 o i,一 3 d q轴 ,Ⅱ d 还 o L
Hale Waihona Puke u 的影响, 所以单纯对 d q , 轴电流作负反馈并不能解除 dq , 轴电流的耦合 , 利用状态反馈和输入前馈 可实现对 d q , 轴电流的完全解耦控制. 现假设理想的整流器输人参考电压矢量 :+ u j 中包含 3 个分量 ,
为有功电流的参考值 , 无功 电流的参考值则根据系统对无功功率的要求进行设定 , 笔者没考虑无功功率控 制问题 , 因此取 E 0 .D . m I
图 2 基 于 dq坐 标 系的 P - WM 整 流 器 系统 控 制 结 构
由 ( ) 司知 , 对 P 1式 在 WM 整流器 的输 入 电流进行 控 制时 , 由于有 功 电流 与无 功 电流 i相 互耦 合 , r q 使
文章 编号 :07— 95 20 )6— 0 8— 4 10 28 (08 0 05 0
电压 型 P WM( S 整 流 器 双 闭环 控 制 方 法 V R)
周佩 娟 黄 守道 张榜 英 , ,
(. 1吉首大学信息管理 与工程学院 , 湖南 张家界 4 70 ;. 20 0 2 湖南大学 电气与信息工程学 院, 湖南 长沙 4 08 ; 102
双闭环矢量控制的电压型PWM整流器参数整定
双闭环矢量控制的电压型PWM整流器参数整定双闭环矢量控制是一种常用于电压型PWM整流器的控制策略,该控制策略通过同时控制电流环和电压环,可以实现对整流器输入电压和输出电流的精确控制。
在进行双闭环矢量控制的参数整定时,通常需要考虑以下几个方面:1.电流环参数整定:电流环主要控制整流器输出电流的稳定性,其参数整定需要根据控制系统的动态特性进行选择。
在进行参数整定时,可以采用传统的PID控制器或者先进的自适应控制算法。
具体的参数整定方法可以采用试探法、经验法或者数学模型等不同的方法进行,其中需要注意参数的合理性和抗干扰能力。
2.电压环参数整定:电压环主要控制整流器输入电压的稳定性,其参数整定也需要根据控制系统的动态特性进行选择。
在进行参数整定时,可以采用与电流环类似的方法,通过试探法、经验法或者数学模型等不同方法选择合适的参数,保证整流器在变化负载和输入电压的情况下能够稳定输出。
3.内环与外环的协调:在进行双闭环矢量控制时,电流环和电压环之间需要进行合理的协调。
通常情况下,电流环的整定需要比电压环更为严格,以确保电流的稳定性。
在实际参数整定中,可以通过调整两个环节的参数比例关系来实现内外环之间的协调,以达到更好的控制效果。
4.频率响应和控制性能:在双闭环矢量控制中,需要对整流器的频率响应和控制性能进行评估和优化。
通过对控制系统的传输函数进行建模和仿真,可以获取整流器系统的频率响应和控制性能,从而选择合适的参数进行整定。
总结起来,双闭环矢量控制的电压型PWM整流器参数整定是一个综合考虑电流环和电压环相互协调的过程。
通过合理选择和调整参数,优化控制系统的频率响应和控制性能,可以实现对整流器输入电压和输出电流的精确控制。
在实际应用中,可以结合试探法、经验法和数学模型等方法进行参数整定,以实现最佳的控制效果。
双闭环矢量控制的电压型PWM整流器参数整定

双闭环矢量控制的电压型PWM整流器参数整定汪万伟;尹华杰;管霖【摘要】双闭环矢量控制的电压型PWM整流器的PI参数整定是一项极其重要却又十分依赖经验的工作,参考文献很少。
本文应用Matlab/Simulink仿真研究了这种整流器系统的L、C参数和PI调节器参数对直流侧电压响应及交流侧谐波与功率因数的影响,提出了一套简单易行、规范化的设计和参数整定方法。
并用实例说明了这种方法的具体操作过程,验证了其有效性。
【期刊名称】《电工技术学报》【年(卷),期】2010(000)002【总页数】7页(PP.67-72,79)【关键词】PWM整流器;矢量控制;PI;参数整定;仿真【作者】汪万伟;尹华杰;管霖【作者单位】华南理工大学电力学院,广州510640【正文语种】中文【中图分类】工业技术2010 年 2 月第25 卷第 2 期电工技术学报TRANSACTIONS OFCHINAELECTROTECHNICALSOCIETY V01.25 No.2Feb. 2010歹 D 环矢量空制的电压型 PWM整流器参数整定汪万伟尹华杰管霖(华南理工大学电力学院广州510640 )摘要双闭环矢量控制的电压型 PWM 整流器的 PI参数整定是一项极其重要却又十分依赖经验的工作,参考文献很少。
本文应用 Matlab/Simulink 仿真研究了这种整流器系统的三、 C 参数和PI 调节器参数对直流侧电压响应及交流侧谐波与功率因数的影响,提出了一套简单易行、规范化的设计和参数整定方法。
并用实例说明了这种方法的具体操作过程,验证了其有效性。
关键词: PWM整流器矢量控制 PI 参数整定仿真中图分类号:TM461ParameterSettingforDoubleClosed-LoopVectorControlof Voltage Source PWM Rectifier WangWanweiYin HuajieGuanLin(SouthChinaUniversityofTechnology Guangzhou 510640 China) Abstract The PIparametersettingof doubleclosed-loopvectorcontrolof voltagesourcePWM rectifier is veryimportantandlargelydependingonexperiencewithfewreferencesavailabl e.Inthispaper,howtheL.CvaluesandPIparametersinfluencetheoutputDCvolta gewaveform,ACsideharmonicsandpowerfactor arestudiedbysimulationin Matlab/Simulink, andbasedonwhichasimpleand normalized method forthecontrolsystemdesignandPIparametersettingis proposed.Some examplesaregiventoillustrate the applicationof this method. Keywords: rectifier,vectorcontrol,PI, parametersetting, simulation 1 引言单位功率因数的电压型 PWM 整流器由于具有网侧电流谐波含量小、功率因数高、电能可双向传输、动态响应快等优点[1-2],而被广泛应用于交流传动系统中,其控制系统往往采用电流内环和电压外环的双闭环直接电流矢量控制方案[3-7]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相电压型P WM整流器双闭环系统校正方法支宝威1, 张晓东2(1.河北省保定热电厂,河北保定 071003;2.华北电力大学控制科学与工程学院,河北保定 071003) 摘 要:分析了三相电压型脉宽调制(P WM)整流器在旋转dq坐标系中的简化数学模型,运用前馈解耦控制策略得到三相电压型P WM整流器的电流解耦模型。
根据该模型,提出了三相P WM整流双闭环系统调节器的整定方法,并通过仿真验证了该整定法的可行性。
关键词:脉宽调制整流器;P I调节器;闭环控制中图分类号:T M461 文献标识码:A 文章编号:167326540(2009)1020042204Desi gn M ethod of Regula tor of Thr ee2P ha se Volta geSour ce Rect i f i er C on tr ol Syste mZH I B ao2w ei1, ZHANG X iao2d ong2(1.Hebei B aoding Ther m al Powe r P lant,Baoding071003,China; 2.College of Contr olScience and Engineering,North China Electric Power University,B aoding071003,China) Ab stra ct:Ana l ysis of the three2phase P WM v oltag e s ource rectifi e r i n the rota ti on dq co ordinate system,and ob2 t a in a si mp lified ma thema tical mode l,t he current decoupli ngmodel of P WM v o ltage s ource rectifier can be built by u2 sing the feed2forwa rd decoup ling control stra t egies.According t o the model,a de sign me th od be introduced ab out how t o g e t pa rame ter of a three2phase P WM rectifie r control s ystem.Key wor d s:PWM r ec tif i er;P I r egul a tor;closed2loop con tr ol0 引 言 全控器件的不连续性及系统模型的电流耦合性,给系统设计带来了困难。
因此,本文根据文献[1]中所提到的前馈解耦控制策略,首先对三相电压型脉宽调制(P WM)整流器进行解耦,得到d q旋转坐标系中的电流解耦模型;其次,三相电压型整流器(VS R)系统的控制有多种方式,其中双闭环控制系统由于控制结构简单、性能优良等优点被广泛采用。
因此,本文根据三相VSR系统的设计要求,提出了较为可行的双闭环系统设计方案,并进行仿真验证。
1 三相P WM整流器数学模型三相电压型P WM整流器电路拓扑结构如图1所示。
三相V S R拓扑结构主要包括交流侧电压源、交流侧的电感、电阻、直流电容,以及由全控开图1 三相电压型P WM整流器主电路拓扑结构关器件和续流二极管组成的三相全桥电路。
假设电网电压三相对称稳定,根据基尔霍夫定律,由图1可列出系统微分方程如下:Ld i ad t+R ia=ea-va0Ld i bd t+R ib=eb-vb0Ld i c+R i=e-v=++(1)——d t c c c0 i dc s a i a s b i b s c i c24式中:e a 、e b 、e c ———交流侧电压源;R,L ———分别为交流侧等效电阻,等效电感;v a0、v b0、v c0———整流器输出电压;s a 、s b 、s c ———桥路开关函数。
通过坐标变换,三相电压型P WM 整流器在d q 旋转坐标系中的模型可描述为:e d e q=L p +R-ωL ωLL p +Ri d i q+v d v q32(v d i d+v q i q )=v dc i dc (2)式中:e d ,e q ———三相电网电动势矢量的d 、q 轴分量;v d ,v q ———三相V S R 交流侧电压矢量的d 、q轴分量;i d ,i q ———三相VS R 交流侧电流的d 、q 轴分量;p ———微分算子。
从三相VSR dq 模型可看出,由于VSR d 、q轴变量相互耦合,给设计造成了一定困难。
因此,可采用前馈解耦控制策略[1],当电流采用P I 调节时,v d 、v q 的控制方程式如式(3)、(4)所示。
v d =-K ip +K iI s (i 3d -i d )-ωL i q +e d (3)v q =-K ip +K iI s(i 3q-i q )-ωL i d +e q (4)式中:K i p 、K iI ———电流内环比例调节增益和积分调节增益;i 3q 、i 3d ———i q 、i d 电流指令值。
将式(3)、(4)代入式(2),并简化得:pi d i q=A i d i q-B i 3d i 3q(5)其中:A =-R -K ip +K iI s/L-R -K ip +K iI s/L B =-1LK ip +K iI s ;式(5)表明基于式(3)、()使三相V S R 电流内环(,q )实现了解耦控制,如图所示。
图2 三相VSR 电流内环解耦控制结构2 双闭环控制系统调节器的设计2.1 电流调节器设计由于两电流内环对称,因此以电流i q 控制为例讨论电流调节器的设计。
考虑电流内环信号采样的延迟和P WM 控制器的小惯性特性,已解耦的i q 电流内环结构如图3所示。
图3 i q 电流环结构 图3中,T s 为电流内环电流采样周期(即P WM 开关周期),K P W M 为桥路P WM 等效增益。
为了使电流内环具有较好的电流跟随性能,因此可按典型I 型系统设计电流环调节器参数,具体整定方法如下。
为简化分析,暂不考虑e q 的扰动,且将P I 调节器传递函数写成零极点形式,即:K ip +K i I s =K ipτi s +1τi sK iI =K ipτi(6) 将小时间常数T s /2、T s 合并,得简化的电流环传递函数为:W i (s )=K ip K P W MR τi s (1.5T s s +1)(7) 电流环系统的闭环传递函数可描述为: W ()=K ip K P W M1.5T s R τi+5T +K K WM 5T R τ=—3—:4i d i 2c i s s 211.s s ip P 1.s i4ω2ns 2+2ξωn s +ω2n(8)其中:2ξωn =11.5T s;ω2n=K ip K P W M1.5T s R τi 取系统阻尼比ξ=0.707,即可求得电流环P I调节器控制参数:K ip =L 3T s K P W M K iI=k ipτi=R3T s K P WM (9) 经过上述分析,整定后三相VSR 的电流内环闭环传递函数可表述为:W ci (s )=14.5T 2ss 2+3T s s +1≈13T s s +1(10)2.2 电压外环调节参数设计三相VS R 直流侧电流i dc 可由开关函数描述为:i dc =s a i a +s b i b +s c i c(11) 根据文献[3],三相VS R 直流侧电流i dc 可简化为:i dc ≈0.75m I m cosθ(12)式中:θ———开关函数基波初始相位角;m ———P WM 调制比(m ≤1)。
综合分析可得三相VS R 电压外环控制结构,如图4所示。
图4 三相VS R 电压外环控制结构图 在图4中,0.75m cosθ可近似处理为比例增益0.75[3]。
将电压采样小惯性时间常数τv 与电流内环等效小时间常数3T s 合并,即T ev =τv +3T s ,且不考虑负载电流i L 扰动,经简化的电压外环控制结构如图5所示。
由于电压外环的主要控制作用是稳定三相VSR 直流电压,故其控制系统整定时,应着重考虑电压外环的抗扰动性能。
图5 三相VS R 电压外环控制结构图 为使电压外环具有较好的抗扰动性能,可采用“模最佳”原则确定系统电压调节器参数[4],试验证明,“模最佳”原则设计的系统比文献[2]中提到的典型Ⅱ型系统设计法得到的系统响应更具有良好的抗扰动性能。
具体整定方法如下。
由图5得电压外环开环传递函数为: W v (s )=0.75K v (T v s +1)CT v s 2(T ev s +1)=K (T v s +1)s 2(T ev s +1)(13)其中:K =0.75K vCT v;T ev =τv +3T s 。
电压外环的闭环传递函数为:W cv (s)=K (T v s +1)T ev s 3+s 2+KT v s +K(14) 闭环频率特性为: W cv (j ω)=K (j T vω+1)(K -ω2)+j (KT v ω-T ev ω3)(15) 闭环幅频特性为:M (ω)=KT 2v ω2+1(K -ω2)2-(KT v ω-T ev ω3)2(16) 使M (ω)在尽可能宽的频带内等于1,则可求得电压调节器的参数为:K v =2C3T evT v =4T ev(17)3 三相VSR 控制系统分析与仿真运用MAT LAB /Si mulink 仿真软件对系统进行仿真分析,并验证上述双闭环系统调节器整定方法的可行性。
根据上述双闭环系统调节器的整定方法可分别算出电流内环及电压外环调节器参数,并由此可对系统进行仿真分析。
图6中的响应曲线为“模最佳”电压外环整定曲线与典型Ⅱ系统整定曲线的对比。
由图可看出,由“模最佳”整定法设计的调节系统不仅具有良好的抗扰动性能,还具有较快的动态响应速度。
由于“模最佳”法整定后的系统闭环传递函——44图6 两种电压调节器设计方案阶跃响应曲线数分子中有一比例微分项,它使相角裕量减小,增大了超调量。
因此可在系统前加一个给定滤波器,以抵消闭环传递函数分子中的微分项,减小超调量。
加入给定滤波器前后系统的响应曲线见图7。
图7 加入给定滤波器前、后的系统响应曲线4 结 语通过仿真试验可知,三相电压型P WM 整流器电压内环采用典型Ⅰ型系统调节方式进行的调节器参数整定对系统电流具有较快的跟踪能力,而电压外环通过“模最佳”整定法得到的系统响应不仅能够满足系统设计要求,而且比采用典型Ⅱ系统整定法得到的调节系统具有更良好的抗扰动性能,动态响应速度也得到了明显改善。