机器人避障问题的MATLAB解法探析
机器人避障问题的解题分析(建模集训)
v1.0 可编辑可修改机器人避障问题的解题分析摘要:本文对2012年全国大学生数学建模竞赛D题机器人避障问题进行了全面分析,对最短路的设计进行了理论分析和证明,建立了机器人避障最短路径的几何模型,对最短时间路径问题通过建立非线性规划模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等问题。
关键词:机器人避障;最短路径;Dijkstra算法;几何模型;非线性规划模型1 引言随着科学技术的进步和计算机技术的发展,机器人的应用越来越广泛,在机器人的应用中如何使机器人在其工作范围内为完成一项特定的任务寻找一条安全高效的行走路径,是人工智能领域的一个重要问题。
本文主要针对在一个场景中的各种静态障碍物,研究机器人绕过障碍物到达指定目的地的最短路径问题和最短时间问题。
本文以2012年“高教社”杯全国大学生数学建模竞赛D题“机器人避障问题”为例进行研究。
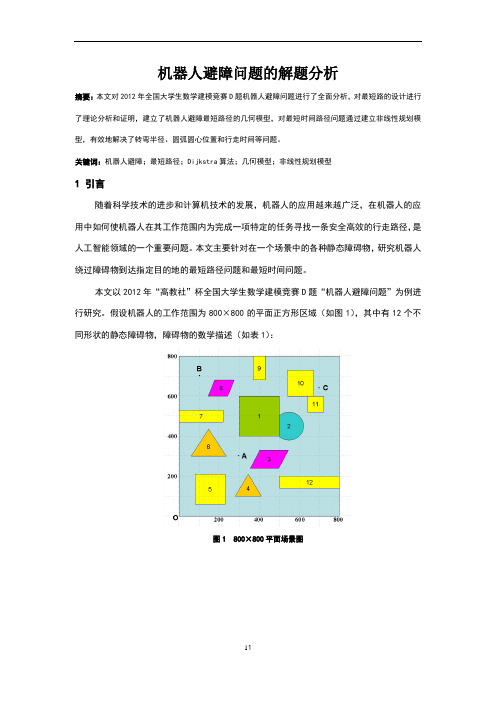
假设机器人的工作范围为800×800的平面正方形区域(如图1),其中有12个不同形状的静态障碍物,障碍物的数学描述(如表1):图1 800×800平面场景图表1在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动,机器人不能与障碍物发生碰撞,障碍物外指定一点为机器人要到达的目标点。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人转弯时,最大转弯速度为21.0100e1)(ρρ-+==v v v (ρ是转弯半径)。
如果超过该速度,机器人将发生侧翻,无法完成行走。
场景图中有4个目标点O(0, 0),A(300, 300),B(100, 700),C(700, 640),下面我们将研究机器人从O(0, 0)出发,求O→A、O→B、O→C和O→A→B→C→O的最短路径,以及机器人从O(0, 0)出发,到达A的最短时间路径问题。
机器人避障优化模型讲解

机器人避障优化模型摘要“机器人避障问题”是在一个规定的区域范围内,有12个位置各异、形状不同的障碍物分布,求机器人从出发点到达目标点以及由出发点经过途中的若干目标点到达最终目标点的避障最短路径及其最短时间,其中必须考虑如圆与切线的关系等问题。
基于优化模型,对于题目实际情况进行研究和分析,对两个问题都用合适的数学思想做出了相应的解答和处理,以此建立符合题意的数学模型。
问题一,要求建立机器人从原点出发到达以区域中另一点为终点的最短路径模型。
机器人的避障路径规划主要包括环境建模、路径搜索、路径平滑等环节,针对本题的具体情况,首先对图形进行分析,并用AutoCAD 软件进行环境建模,使其在障碍物外围延伸10个单位,然后考虑了障碍物对路径安全的影响再通过蚁群算法来求它的的最短路径,由于此时最短路径中存在转弯路径,需要用人工势场法进行路径平滑处理,从而使它的最短路径在蚁群算法算出的结果情况下,可以进一步缩短其路径,从而存在机器人以区域中一点到达另一点使其避障的路径达到最短,在最终求解时,通过matlab 软件求其最优解。
问题二,仿照问题一机器人避障路径规划的基本环节所建立的一般模型,再根据题二所提出的具体问题,建立机器人从O (0,0)出发,使达到A 的最短时间路径模型。
其中已知最大速度为50=v 个单位/秒,机器人转弯时,最大转弯速度为21.0100e 1)(ρρ-+==v v v ,其中ρ是转弯半径,并有ν为增函数。
且有0νν<恒成立,则可知行走路径应尽量减少走圆弧,且可时间由走两段直线加圆弧的时间之和。
关键词: 最短路径 蚁群算法 人工势场法 机器人避障一 、问题重述图1是一个800×800的平面场景图,在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍障碍物的距离至少超过10个单位)。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
matlab避障最短路径

matlab避障最短路径一、引言随着机器人技术的发展,自动化导航成为一个重要的研究领域。
在许多应用中,机器人需要通过复杂的环境中,避开障碍物并找到最短路径。
Matlab作为一种强大的数学计算工具,为我们提供了实现这一目标的丰富功能和工具。
二、建立环境模型在开始编写避障算法之前,首先需要建立机器人所在环境的模型。
可以使用Matlab的图形界面工具来实现,也可以通过编程方式来创建。
这里我们选择使用编程方式来建立环境模型。
在Matlab中,可以使用矩阵来表示环境模型。
假设我们的环境是一个网格,每个网格可以是空地、障碍物或起点/终点。
我们可以用不同的数值来表示不同的状态,例如0表示空地,1表示障碍物,2表示起点,3表示终点。
三、编写避障算法在建立环境模型之后,我们可以开始编写避障算法了。
这里我们使用A*算法来寻找最短路径。
A*算法是一种常用的启发式搜索算法,它通过估计当前节点到目标节点的代价来选择下一个节点,从而找到一条最短路径。
具体来说,A*算法通过维护一个开放列表和一个关闭列表来搜索最短路径。
初始时,将起点加入开放列表。
然后,重复以下步骤直到找到终点或开放列表为空:1. 从开放列表中选择代价最小的节点作为当前节点。
2. 如果当前节点是终点,搜索结束,返回最短路径。
3. 否则,将当前节点加入关闭列表,并计算其相邻节点的代价。
4. 对于每个相邻节点,如果它不在关闭列表中并且不是障碍物,则更新其代价,并将其加入开放列表。
四、Matlab实现在Matlab中,可以使用自定义函数来实现A*算法。
下面是一个简单的示例代码:```matlabfunction path = astar(start, goal, map)% 初始化开放列表和关闭列表openList = start;closeList = [];% 初始化起点的代价为0start.g = 0;while ~isempty(openList)% 选择开放列表中代价最小的节点作为当前节点[~, index] = min([openList.f]);current = openList(index);% 如果当前节点是终点,搜索结束if current == goalpath = reconstructPath(current);return;end% 将当前节点加入关闭列表closeList = [closeList, current];openList(index) = [];% 对当前节点的相邻节点进行处理neighbors = findNeighbors(current, map);for i = 1:length(neighbors)neighbor = neighbors(i);% 如果相邻节点在关闭列表中或是障碍物,跳过if ismember(neighbor, closeList) || map(neighbor) == 1continue;end% 计算相邻节点的代价g = current.g + 1;h = heuristic(neighbor, goal);f =g + h;% 如果相邻节点不在开放列表中,或其代价更小if ~ismember(neighbor, openList) || g < neighbor.gneighbor.g = g;neighbor.f = f;neighbor.parent = current;% 如果相邻节点不在开放列表中,加入if ~ismember(neighbor, openList)openList = [openList, neighbor];endendendend% 如果开放列表为空,搜索失败error('No path found.');endfunction path = reconstructPath(node)path = [];while ~isempty(node.parent)path = [node, path];node = node.parent;endendfunction neighbors = findNeighbors(node, map)% 根据当前节点的位置和地图大小,找到相邻节点[row, col] = size(map);neighbors = [];% 上方节点if node.row > 1neighbors = [neighbors, struct('row', node.row-1, 'col', node.col)];end% 下方节点if node.row < rowneighbors = [neighbors, struct('row', node.row+1, 'col', node.col)];end% 左方节点if node.col > 1neighbors = [neighbors, struct('row', node.row, 'col', node.col-1)];end% 右方节点if node.col < colneighbors = [neighbors, struct('row', node.row, 'col', node.col+1)];endendfunction h = heuristic(node, goal)% 使用曼哈顿距离作为启发函数h = abs(node.row-goal.row) + abs(node.col-goal.col);end```以上代码实现了A*算法,并提供了辅助函数来计算相邻节点、启发函数和重构最短路径。
机器人避障问题的MATLAB解法探析

2012年10月总391期科技探索头、铁路等在乡镇内的位置、布置,对城镇本身的空间发展具有重要的影响,如果不能正确地利用对外交通设施,则会阻碍城镇的进一步发展。
4.5建立规范的交通秩序建立科学的交通规范道路交通秩序,提高道路交通设施的利用率,增强居民的交通意识,从而提高乡镇交通的效率,建立良好的城镇交通秩序。
具体措施如完善交通标志、信号灯控制等交通设施的建设;进行交通知识的普及;静态交通和动态交通综合调控。
5结论对每个乡镇道路改造与规划都要仔细调查道路现状与特征,认真分析现有道路问题的成因,以科学发展观为指导,按照适度超前的原则,编制乡镇交通建设规划并指导实施,使交通能始终当好经济建设的先行官,服务于全国城镇化进程。
参考文献:[1]《公路网规划》裴玉龙,人民交通出版社,2011(6)[2]《城乡一体化》汝信,中国社会科学院,2011(12)中图分类号:G64文献标识码:A文章编号:1007-0745(2012)10-0104-01孙晓娟张艳妮(长春市花园路一号基础部数学教研室130117)机器人避障问题的MATLAB 解法探析摘要:本文对2012年全国大学生数学建模竞赛D 题“机器人行走避障问题”,给出了利用matlab 这一数学软件进行求解的方法,并对该方法的优缺点进行了分析。
关键词:机器人避障matlab 2012年全国大学生数学建模竞赛D 题“机器人行走避障问题”如下:在一个800×800的平面场景图中,原点O(0,0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的圆弧组成,每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位。
计算机器人从O(0,0)出发,O →A 、O →B 、O →C 和O →A →B →C →O 的最短路径。
机器人Bug避障算法的Matlab半实物仿真软件设计
中 国 科 技 论 文
CH I NA S CI ENCEP APE R
Vo 1 . 1 O NO . 8 Ap r .2 0 1 5
机器人 B u g避 障 算 法 的 Ma t l a b半 实 物 仿 真 软 件 设 计
黄培奎 , 赵祚喜 , 吴志伟 , 曹文君 , 施 垒 , 刘 雄
实验结果 与实 际情况吻合 , 验证 了B u g 避 障算法, 对经 由传感器实 时数据采集 的路径规划 算法研 究具有参考 意义 。
关键 词 : 半 实 物仿 真 ; B u g算 法 ; 移动机器人 ; 路径 规 划
中 图分 类 号 : T P 2 4 9 文献标志码 : A 文章编号 : 2 0 9 5 —2 7 8 3 ( 2 0 1 5 ) 0 8 —0 9 9 0 —0 5
( 1 .华 南 农 业 大 学 南方 农 业 机 械 与 装 备 关 键 技 术 教 育 部 重 点 实验 室 , 广州 5 1 0 6 4 2 ; 2 .华 南农 业 大 学 工程 学 院 , 广州5 1 0 6 4 2 )
摘 要: 以外接激光测距仪 的 P i o n e e r 3 一 A T移 动机 器人 作为 物理平 台, 用 AR I A Ma t l a b接 I : / 软件 实现 对物理平 台的控制 与通 信。通过 S i mu l i n k自定义模块封装 B u g算 法, 设计 Ma t l a b Gr a p h i c a l Us e r I n t e r f a c e s( GUI ) 界面设置仿真参数和动 态显示仿真 结果。经 由笔者开发的折线 B u g与圆弧 B u g算法实验表 明, 该 软件 可灵 活执 行纯仿真 、 半实 物仿真与物理 执行 3种工作 方式,
数学建模机器人避障问题
现需建立机器人从区域中一点到达另一点的避障最短路径和最短时间路径的数学模型。对场景图中4个点O(0, 0),A(300, 300),B(100, 700),C(700, 640),具体计算:
模型一:(点圆模型)
该模型主要求解 —— 的路径长度,该路径只有一个转弯,由图2易知, ,C、D均为直线与圆的切点,CD为圆弧, 为圆弧对应的圆心角的大小,根据已积累的知识,圆弧的长度为圆弧对应的圆心角与圆半径的乘积,即 ,同时利用余弦定理
,即可求得总距离为:
S= ;
其中 =
模型二:(双圆异侧模型)
通过MATLAB编程,画出其图像,求解得出:当半径 =11.435时,时间T最小,其大小为94.5649(秒)。
关键词:最短路径线圆模型行走矩阵MATLAB
二、问题重述
在一个800×800的平面场景图(见附录一),在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物,障碍物的数学描述如下表:
机器人行驶路线是由直线段和圆弧组成。机器人从O(0, 0)出发,建立数学模型求得O→A、O→B、O→C和O→A→B→C→O的最短路径。现将各个路段的情况进行综合分析,根据每个路段所遇到的情况,从起始点到目标点的最短距离应该是直线段与圆弧组成,由已知的数学知识,两点之间线段最短,故机器人走的直线越多,路径越短,也就是说当机器人绕过障碍物的时候,半径越小,路径越短,根据题意,转弯半径可按最小半径10来计算,经过分析,可建立如下三个线圆模型。
边长80
12
长方形
机器人壁障问题——数学建模讲解

机器人避障问题摘要:当今科学技术日益发达,高科技产品尤其是机器人在我们日常生活中运用的越来越广泛,它能够代替人类完成许许多多的工作,但如何能让机器人自动化的完成人类交给的任务成为设计机器人的关键。
我们做此题就是为了更好的利用机器人为我们提供方便,提高生活质量,若机器人程序设计不当不仅不会给人类带来方便,还很有可能给我们的生活带来更多的麻烦。
本题中提出了如何让机器人能够自动识别障碍物,保证机器人能够在合理区域行走,并设计出如何能让机器人自动判断最短路程于最短时间下行走路线的问题。
所以解决好本题可以为我们的生活提供帮助。
本文通过运用两点之间直线最短理论,优化问题,最短路问题,图论,以及运用matlab软件编程及作图的方法,阐述了机器人避障问题的相对优化方案的解决办法,即“两点之间直线最好,转弯半径最小”的理论,通过计算中的比较与选择把四条最短路径都求出了相对最优解,论证了转弯速度不会随着r的增加一直增大或减小,而是有一个最小极点的思想。
从而求出了r,以及最短的时间。
问题一,通过对最短路问题的分析,我们很容易分解成线圆结构来求解,然后把可能路径的最短路径采用穷举法列举出来,最终得出最短路径:O →A 最短路径为:471.0372O →B 最短路径为:838.0466O →C 最短路径为:1085.7531O→A→B→C→O最短路径为:2834.6591问题二,通过建立时间t与r的关系式,得出r在11.504时,从O到A的时间相对最短,最短时间为98.606004。
我们可以利用此篇论文解决生活中实际的问题,在计算时可以节省大量的时间,使机器人又准确又完善的完成我们给定的任务,从而进行拓展,给定区域内任何两个点,我们都可求出其最短路径和走完全程的最快时间。
从而可以让机器人帮助我们给家里打扫卫生或设计自动吸尘器等,也可使机器人在最短的时间完成工作,提高效率,延长机器人的使用寿命。
关键字:最短路问题优化问题 matlab一 问题重述 随着现代科学技术日新月异的发展,机器人越来越多的出现在日常生活中,它既可以通过运行预先编排的程序为人类服务,根据人工智能程序自动处理一些生活中问题,进而协助或者相应地取代人类的工作,可以说机器人的创新与改进正一步步影响着人类的发展。
基于Matlab的机器人避障仿真软件设计

I S SN 1 001 . 9 08l
2 01 5— 0 6. 2 0
计 算机应用, 2 0 1 5 , 3 5 ( S 1 ) : 2 2 6— 2 2 8 , 2 4 2 文章编号 : 1 0 0 1 — 9 0 8 1 ( 2 0 1 5 ) S 1 — 0 2 2 6 — 0 3
关键词 : 移动机器人 ; 避 障; 仿真软件 ; Ma t l a b 中图 分 类 号 : T P 2 4 9 文 献标 志码 : A
De s i g n o f mo bi l e r o bo t o bs t a c l e a v o i da n c e s i mu l a t o r b a s e d o n Ma t l a b
雄
( 1 . 华南农业大学 工程学院 , 广州 5 1 0 6 4 2; 2 . 南方农业机械与装备关键技术教育部重点实验室( 华南农业大学), 广州 5 1 0 42 6 )
摘
要: 为了提 高机 器人避 障算 法开发 效率 , 设计 了一 种基 于 Ma t l a b的机 器人避 障 算法设 计与试 验仿 真软件 。
C ODE N J YI I DU
h t t p : / / w w w . j o c a . a n
基 于 Ma t l a b的机 器 人避 障仿 真 软 件 设 计
吴志伟 , 赵祚喜 , 黄培奎 , 陈嘉琪 , 刘
( 通信作者 电子邮箱 z h a o — z u o x i @h o t ma i l . c o m)
Ab s t r a c t :A Ma t l a b b a s e d s i mu l a t o r w a s d e s i g n e d i n o r d e r t o i mp r o v e t h e e ic f i e n c y . T h e s i mu l a t o r i n c l u d e s t wo p a d s . t h e i f r s t p a r t i s a u s e r i n t e r f a c e f o r ma n i p u l a t i o n a n d s u p e r v i s i o n wh i c h i s e s t a b l i s h e d b a s e d o n Ma t l a b / GUI .t h e s e c o n d p a r t i S t h e k e y o f t h i s s o f t w a r e e s t a b l i s h e d t h r o u g h Ma t l a b p r o g r a mmi n g a n d S i mu l i n k mo d e l i n g ,i n c l u d i n g t h e s i mu l a t i o n o f r a n g e — s e n s o r a n d mo b i l e r o b o t . T h e s y s t e m mo d e l i n g , s o f t wa r e p r o g r a mmi n g a n d t h e d e s i g n i n g o f t h e u s e r i n t e r f a c e w e r e p r e s e n t e d a n d t h e k e y t e c h n i q u e s u s e d t o r e a l i z e t h e s o f t w a r e w e r e d e s c r i b e d . E x p e r i me n t a l r e s u l t s h o ws t h e e f f e c t i v e n e s s o f t h e a b o v e s i mu l a t o r . Ke y wo r d s :mo b i l e r o b o t ;o b s t a c l e a v o i d a n c e ;s i mu l a t o r ; Ma t l a h
2012高教社杯数模竞赛D题——机器人避障问题

机器人避障问题摘要本文研究了在已知区域障碍物分布的情况下,机器人从起点到目标点避障最短路径或最短时间路径的问题,路径必须是由圆弧和与之相切的直线段组成的线圆结构。
一开始先对模型预处理,将所有障碍物外扩10个单位长度,划定危险区域,得到障碍扩展图。
针对问题一,经过分析论证,无论起点到目标点间危险区域有多少,最短路径都应该是紧绕危险点的切线圆路径,且可根据需依次绕过的危险点情况划分为N条子路径(见图5.1.2)求解,圆弧段取允许最小转弯半径。
模型求解分两步走:一、将实际障碍图转化为加权可视图,利用Dijstra算法搜索出在可视图下的最短路径,主要是找到必须绕过的若干危险点。
二、根据障碍扩展图将可视图中的路径修正为实际情况下的切线圆路径,求出最终结果。
在求解过程中运用MATLAB数学软件给出路径中每段直线段或圆弧的起点和终点坐标、圆弧的圆心连接两条切线,使机器人总的行走时间最短。
而圆弧可以有圆心坐标和半径唯一确定。
由此构建机器人行走总时间的目标函数,将机器人不与障碍物碰撞作为约束条件,将该问题转变为一个非线性规划问题,借助matlab求得最优解为:T=94.3314s。
关键词:路径规划最优化模型切线圆路径 Dijstra算法非线性规划matlab求解一、问题重述图1是一个800×800的平面场景图,在原点O(0,0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰标点与障碍物的距离至少超过10个单位)。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人避障问题的解题分析建模集训资料全

机器人避障问题的解题分析摘要:本文对2012年全国大学生数学建模竞赛D题机器人避障问题进行了全面分析,对最短路的设计进行了理论分析和证明,建立了机器人避障最短路径的几何模型,对最短时间路径问题通过建立非线性规划模型,有效地解决了转弯半径、圆弧圆心位置和行走时间等问题。
关键词:机器人避障;最短路径;Dijkstra算法;几何模型;非线性规划模型1 引言随着科学技术的进步和计算机技术的发展,机器人的应用越来越广泛,在机器人的应用中如何使机器人在其工作围为完成一项特定的任务寻找一条安全高效的行走路径,是人工智能领域的一个重要问题。
本文主要针对在一个场景中的各种静态障碍物,研究机器人绕过障碍物到达指定目的地的最短路径问题和最短时间问题。
本文以2012年“高教社”杯全国大学生数学建模竞赛D题“机器人避障问题”为例进行研究。
假设机器人的工作围为800×800的平面正方形区域(如图1),其中有12个不同形状的静态障碍物,障碍物的数学描述(如表1):图1 800×800平面场景图表1在原点O(0, 0)点处有一个机器人,它只能在该平面场景围活动,机器人不能与障碍物发生碰撞,障碍物外指定一点为机器人要到达的目标点。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人无法完成行走。
机器人直线行走的最大速度为50=v 个单位/秒。
机器人转弯时,最大转弯速度为21.0100e1)(ρρ-+==v v v (ρ是转弯半径)。
如果超过该速度,机器人将发生侧翻,无法完成行走。
场景图中有4个目标点O(0, 0),A(300, 300),B(100, 700),C(700, 640),下面我们将研究机器人从O(0, 0)出发,求O→A、O→B、O→C和O→A→B→C→O的最短路径,以及机器人从O(0, 0)出发,到达A 的最短时间路径问题。
智能机器人避障路径规划算法研究
智能机器人避障路径规划算法研究智能机器人只有具备自主移动能力才能实现应用价值。
路径规划用于决策机器人在环境中如何行走的问题,是实现机器人智能化的关键技术。
为提高机器人路径规划,对未知环境的实时性、适应性和优化性要求越来越高。
自主移动机器人是集环境感知、动态策略与规划、行为控制与执行等多功能于一体的综合系统。
近几年,移动机器人技术在工业、农业、医学、航天航空等许多领域发挥了重要作用。
其中智能避障更是研究领域的难点和热点,智能避障是能够根据采集障碍物的状体信息,按照一定的方法进行有效的避障,最后到达终点。
本文主要介绍了动态窗口和Bug2的避障算法和研究与仿真。
实现这两种避障算法主要基于Matlab等语言编程开发,实现对移动机器人避障算法的仿真。
Matlab功能强大、编程简单、适用广。
最后,验证基于Bug算法的几种路径规划方法,将避障实时性,环境的适应性、规划路径的优化性作为算法性能指标,进行仿真实验与对比实验分析。
结果验证了算法的有效性。
标签:智能机器人;避障;MATLAB仿真;路径规划1 绪论智能机器人避障算法的研究对于推进机器人领域的应用和发展具有重要的意义。
随着计算机技术、传感器技术、控制技术的发展,智能机器人的避障技术已经取得了丰硕的研究成果,其应用领域不断的扩大,应用复杂程度也越来越高,因此对其关键技术提出了更高要求,相应的方法也更加成熟。
本文通过查阅文献资料,对目前智能机器人的发展动态有了一定了解。
对现阶段机器人避障的一些常用方法做了研究,然后设计了不同算法在未知环境下的避障仿真实验来验证本文所设计的算法的可行性。
路径规划要求机器人能够在较短的时间内,感知到范围尽可能大的区域,从而找到最近的路径使机器人能够沿着最优路径运动到终点,并避开障碍物。
2 基于动态窗口的避障算法及仿真2.1 概述机器人局部路径规划的方法很多,动态窗口法就是其中的一种,其主要是在速度(v,w)空间中采样多组速度,并模拟机器人在这些速度下一定时间内的轨迹。
matlab 冗余机械臂避障

matlab 冗余机械臂避障机械臂是一种常用于工业生产和制造业中的设备,但在日常生活中,我们也可以看到它的身影,例如在医疗、服务机器人等领域。
然而,随着机械臂应用的增多,在狭小的空间中避免碰撞问题成为了一项重要挑战。
如何通过程序控制机械臂避开障碍物呢?今天,我们就来探讨一下“matlab冗余机械臂避障”的实现。
首先,我们需要明确冗余机械臂的概念。
所谓冗余机械臂,就是指比必要的自由度多出来的自由度。
对于一个具有6个自由度的机械臂来说,如果它有7个自由度,那么这个机械臂就是一个冗余机械臂。
冗余机械臂可以增加机械臂的灵活性,使其具有更好的避障能力。
接着,我们需要确定机械臂的起始和目标位置,以及需要避开的障碍物。
这些信息可以通过传感器或视觉识别技术获取。
我们可以将起始位置、目标位置和障碍物的位置放在坐标系中,以便编写程序进行计算。
第三步是计算机械臂的轨迹。
由于机械臂是一个冗余机械臂,冗余自由度可以用来避开障碍物。
我们可以通过对机械臂的关节位置进行优化,找到一条最短且不碰撞的轨迹。
最后,我们可以通过matlab套件中的机械臂运动仿真工具,将机械臂的轨迹进行可视化。
这有助于我们理解机械臂的运动轨迹,以及改进和优化轨迹规划算法。
通过上述步骤,我们可以实现matlab冗余机械臂的避障。
当然,这只是一个基础的演示,实际应用会更加复杂。
例如,在实际环境中,机械臂可能会面临多个障碍物,需要制定更加细致的避障规划策略。
但无论如何,通过matlab工具的支持,我们可以更好地理解和呈现机械臂的运动轨迹和避障效果,从而促进冗余机械臂技术的发展和应用。
matlab轨迹避障代码
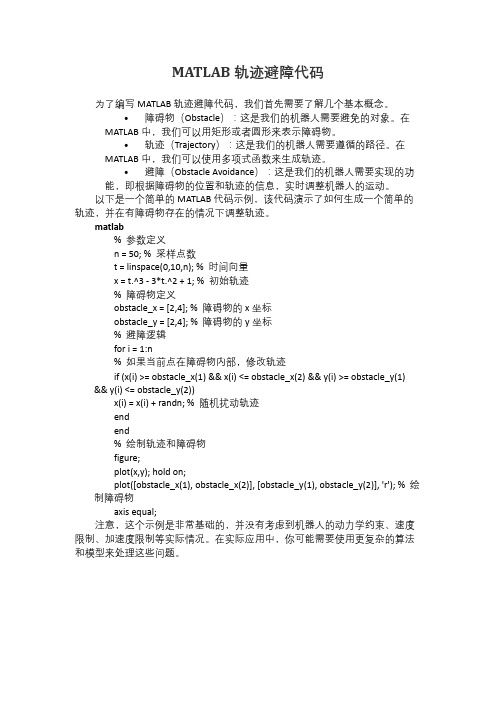
MATLAB轨迹避障代码为了编写MATLAB轨迹避障代码,我们首先需要了解几个基本概念。
•障碍物(Obstacle):这是我们的机器人需要避免的对象。
在MATLAB中,我们可以用矩形或者圆形来表示障碍物。
•轨迹(Trajectory):这是我们的机器人需要遵循的路径。
在MATLAB中,我们可以使用多项式函数来生成轨迹。
•避障(Obstacle Avoidance):这是我们的机器人需要实现的功能,即根据障碍物的位置和轨迹的信息,实时调整机器人的运动。
以下是一个简单的MATLAB代码示例,该代码演示了如何生成一个简单的轨迹,并在有障碍物存在的情况下调整轨迹。
matlab% 参数定义n = 50; % 采样点数t = linspace(0,10,n); % 时间向量x = t.^3 - 3*t.^2 + 1; % 初始轨迹% 障碍物定义obstacle_x = [2,4]; % 障碍物的x坐标obstacle_y = [2,4]; % 障碍物的y坐标% 避障逻辑for i = 1:n% 如果当前点在障碍物内部,修改轨迹if (x(i) >= obstacle_x(1) && x(i) <= obstacle_x(2) && y(i) >= obstacle_y(1) && y(i) <= obstacle_y(2))x(i) = x(i) + randn; % 随机扰动轨迹endend% 绘制轨迹和障碍物figure;plot(x,y); hold on;plot([obstacle_x(1), obstacle_x(2)], [obstacle_y(1), obstacle_y(2)], 'r'); % 绘制障碍物axis equal;注意,这个示例是非常基础的,并没有考虑到机器人的动力学约束、速度限制、加速度限制等实际情况。
机器人避障问题的最短路径分析
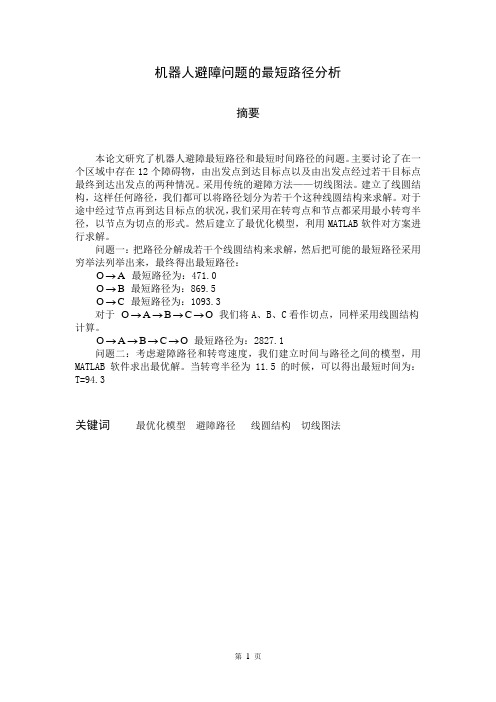
机器人避障问题的最短路径分析摘要本论文研究了机器人避障最短路径和最短时间路径的问题。
主要讨论了在一个区域中存在12个障碍物,由出发点到达目标点以及由出发点经过若干目标点最终到达出发点的两种情况。
采用传统的避障方法——切线图法。
建立了线圆结构,这样任何路径,我们都可以将路径划分为若干个这种线圆结构来求解。
对于途中经过节点再到达目标点的状况,我们采用在转弯点和节点都采用最小转弯半径,以节点为切点的形式。
然后建立了最优化模型,利用MATLAB软件对方案进行求解。
问题一:把路径分解成若干个线圆结构来求解,然后把可能的最短路径采用穷举法列举出来,最终得出最短路径:AO→最短路径为:471.0O→最短路径为:869.5BO→最短路径为:1093.3C对于O→→→我们将A、B、C看作切点,同样采用线圆结构CBAO→计算。
O→→→→最短路径为:2827.1AOCB问题二:考虑避障路径和转弯速度,我们建立时间与路径之间的模型,用MATLAB软件求出最优解。
当转弯半径为11.5的时候,可以得出最短时间为:T=94.3关键词最优化模型避障路径线圆结构切线图法一、问题重述本文是求一个机器人在800×800的平面场景图中避开障碍物,建立从原点O(0, 0)点处出发达到终点的最短路径和最短时间路径的模型。
即求:1、O→A 、O→B 、O→C 和O→A→B→C→O 的最短路径。
2、O →A 的最短时间路径。
机器人在行走时的要求是:1、它只能在该平面场景范围内活动2、图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物(障碍物的分布如图1)3、障碍物外指定一点为机器人要到达的目标点(要求目标点与障碍物的距离至少超过10个单位)。
4、规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。
基于MATLAB环境的四旋翼无人机避障控制方法研究
基于MATLAB 环境的四旋翼无人机避障控制方法研究1.1 前言无人机在飞行过程中往往会遇到障碍物分布,在检测到存在障碍物之后就需要采取有效的避障措施避免发生碰撞。
这一过程可以分为避障动作控制与避障路径规划两个部分。
针对避障动作控制问题,本章将对无人机展开动力学分析后建立辅助避障系统模型,再利用遗传算法实现动作操作的精确控制。
针对避障路径规划问题,本章提出了一种基于自适应遗传算法的避障路径规划模型,帮助实现最优路径选择。
1.2 无人机避障系统模型1.2.1 无人机位置模型就本质而言,无人机避障是对其位置进行控制的过程。
因此首先需要建立起能够反应无人机所处位置的完善系统。
此外,由于无人机运行中需要一定的空间体积,而且在改变飞行状态时也需要考虑其姿态的变化,故而也有必要对其进行姿态控制。
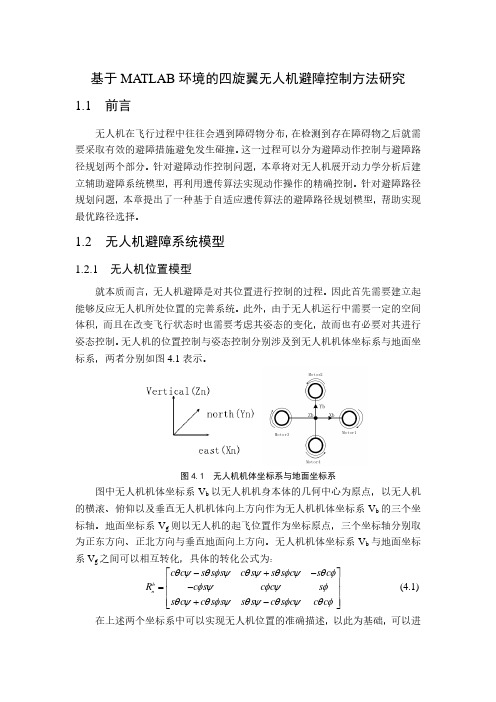
无人机的位置控制与姿态控制分别涉及到无人机机体坐标系与地面坐标系,两者分别如图4.1表示。
图4.1 无人机机体坐标系与地面坐标系图中无人机机体坐标系V b 以无人机机身本体的几何中心为原点,以无人机的横滚、俯仰以及垂直无人机机体向上方向作为无人机机体坐标系V b 的三个坐标轴。
地面坐标系V g 则以无人机的起飞位置作为坐标原点,三个坐标轴分别取为正东方向、正北方向与垂直地面向上方向。
无人机机体坐标系V b 与地面坐标系V g 之间可以相互转化,具体的转化公式为:b nc c s s s c s s s c s c R c s c c s s c c s s s s c s c c c θψθφψθψθφψθφφψφψφθψθφψθψθφψθφ-+-⎡⎤⎢⎥=-⎢⎥⎢⎥+-⎣⎦ (4.1)在上述两个坐标系中可以实现无人机位置的准确描述,以此为基础,可以进一步实现无人机飞行轨迹规划等任务。
当无人机在飞行过程中遭遇障碍物时,需要及时动作以避开障碍,由于环境中障碍物的出现存在较大的随机性,因此障碍的具体位置信息无法事先由地面坐标系V g 描述,也就是说,仅依靠地面坐标系V g 的坐标信息无法实现无人机避障任务。
冗余机械臂避障matlab
冗余机械臂避障matlab机械臂是一种能够模拟人类手臂运动的机器人,它可以完成各种复杂的工作任务。
在实际应用中,机械臂需要具备避障能力,以保证其在复杂环境中的安全运行。
冗余机械臂是一种具有多余自由度的机械臂,它可以通过调整自身姿态来避开障碍物,从而实现避障功能。
本文将介绍如何使用matlab实现冗余机械臂的避障控制。
我们需要建立机械臂的运动学模型。
运动学模型是描述机械臂运动规律的数学模型,它可以通过机械臂的关节角度计算出机械臂的末端位置和姿态。
在matlab中,我们可以使用Robotics System Toolbox工具箱来建立机械臂的运动学模型。
具体步骤如下:1. 定义机械臂的DH参数,包括关节长度、关节角度、关节偏移和连杆旋转角度。
2. 使用robotics.RigidBodyTree函数创建机械臂的刚体树模型。
3. 使用robotics.RigidBody函数创建机械臂的刚体模型,并将其添加到刚体树中。
4. 使用robotics.Joint函数创建机械臂的关节模型,并将其添加到刚体树中。
5. 使用robotics.RigidBodyJoint函数将关节模型连接到刚体模型上。
6. 使用robotics.RigidBodyTree函数计算机械臂的运动学模型。
建立好机械臂的运动学模型后,我们需要设计避障控制算法。
在冗余机械臂中,我们可以通过调整机械臂的姿态来避开障碍物。
具体步骤如下:1. 使用机械臂的运动学模型计算机械臂的末端位置和姿态。
2. 使用传感器获取障碍物的位置和大小。
3. 根据障碍物的位置和大小,计算机械臂需要调整的姿态。
4. 使用机械臂的运动学模型计算机械臂的关节角度。
5. 控制机械臂运动到目标姿态。
在matlab中,我们可以使用Robotics System Toolbox工具箱中的函数来实现避障控制算法。
具体步骤如下:1. 使用robotics.OccupancyGrid函数创建占据栅格地图。
机器人壁障问题数学建模

机器人避障问题摘要:当今科学技术日益发达,高科技产品尤其是机器人在我们日常生活中运用的越来越广泛,它能够代替人类完成许许多多的工作,但如何能让机器人自动化的完成人类交给的任务成为设计机器人的关键。
我们做此题就是为了更好的利用机器人为我们提供方便,提高生活质量,若机器人程序设计不当不仅不会给人类带来方便,还很有可能给我们的生活带来更多的麻烦。
本题中提出了如何让机器人能够自动识别障碍物,保证机器人能够在合理区域行走,并设计出如何能让机器人自动判断最短路程于最短时间下行走路线的问题。
所以解决好本题可以为我们的生活提供帮助。
本文通过运用两点之间直线最短理论,优化问题,最短路问题,图论,以及运用matlab软件编程及作图的方法,阐述了机器人避障问题的相对优化方案的解决办法,即“两点之间直线最好,转弯半径最小”的理论,通过计算中的比较与选择把四条最短路径都求出了相对最优解,论证了转弯速度不会随着r的增加一直增大或减小,而是有一个最小极点的思想。
从而求出了r,以及最短的时间。
问题一,通过对最短路问题的分析,我们很容易分解成线圆结构来求解,然后把可能路径的最短路径采用穷举法列举出来,最终得出最短路径:O →A 最短路径为:471.0372O →B 最短路径为:838.0466O →C 最短路径为:1085.7531O→A→B→C→O最短路径为:2834.6591问题二,通过建立时间t与r的关系式,得出r在11.504时,从O到A的时间相对最短,最短时间为98.606004。
我们可以利用此篇论文解决生活中实际的问题,在计算时可以节省大量的时间,使机器人又准确又完善的完成我们给定的任务,从而进行拓展,给定区域内任何两个点,我们都可求出其最短路径和走完全程的最快时间。
从而可以让机器人帮助我们给家里打扫卫生或设计自动吸尘器等,也可使机器人在最短的时间完成工作,提高效率,延长机器人的使用寿命。
关键字:最短路问题优化问题 matlab一 问题重述 随着现代科学技术日新月异的发展,机器人越来越多的出现在日常生活中,它既可以通过运行预先编排的程序为人类服务,根据人工智能程序自动处理一些生活中问题,进而协助或者相应地取代人类的工作,可以说机器人的创新与改进正一步步影响着人类的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人避障问题的MATLAB解法探析
作者:孙晓娟张艳妮
来源:《科技探索》2012年第10期
摘要:本文对2012年全国大学生数学建模竞赛D题“机器人行走避障问题”,给出了利用matlab这一数学软件进行求解的方法,并对该方法的优缺点进行了分析。
关键词:机器人避障 matlab
2012年全国大学生数学建模竞赛D题“机器人行走避障问题”如下:
在一个800×800的平面场景图中,原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。
图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物。
规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。
机器人不能折线转弯,转弯路径由与直线路径相切的圆弧组成,每个圆弧的半径最小为10个单位。
为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位。
计算机器人从O(0,0)出发,O→A、O→B、O→C和O→A→B→C→O的最短路径。
一、问题的分析
为达到要求,我们按照以下原则选择路径:
(1)在障碍物拐点处的圆弧半径为临界半径个单位;
(2)因为直线速度大于转弯速度,所以在不转弯的地方尽可能走直线;
按照上述原则,我们选取以下步骤求最短路径:
(1)穷举出起始点与目标点的所有可能直线路径,判断出最短直线路径;
(2)针对上述最短直线路径,在障碍物拐点处加入弧线转弯,然后计算实际最短行走路径。
二、问题的求解
按照上述步骤,逐步求最短路径:
(1)首先画出O到A允许行走所有直线路线,如图所示。
(2)计算出各节点到下一节点的距离作为权值给各条边赋权,可以求解出最优直线路径。
用MATLAB软件,程序如下:
sets:
cities/O,B1,B2,C1,C2,A/;
roads(cities,cities)/O,B1 O,B2 O,C1 B1,A B1,C2 C1,B1 C1,B2 B2,C2 B2,A C2,A /: w,x;
data:
w= 224.7 237.7 100 237.7 150 150 150 150 250 114;
n=@size(cities);
min=@sum(roads:w*x);
@for(cities(i)|i #ne# 1 #and# i #ne# n:
@sum(roads(i,j):x(i,j))=@sum(roads(j,i):x(j,i)));
@sum(roads(i,j)|i #eq# 1:x(i,j))=1;
end
计算出结果(只列出有用部分):
Global optimal solution found.
Total solver iterations: 0
Variable Value Reduced Cost
X( O, B1) 1.000000 0.000000
X( B1, A) 1.000000 0.000000
由此可以知道最短直线路线为O→B1→A
(3)在直线路线O→B1→A加入弧线路段,即在点处考虑转弯半径。
再利用matlab可求出各拐点坐标,从而确定具体路径。
经计算O→B1→A 最短路线的总路长为471.0372。
该方法的优点是计算结果精确,缺点是对matlab软件编程要求较高、不易操作。
参考文献:
[1]高隆昌,数学建模基础理论,北京,科学出版社,2007.。