基于球面投影的单站地面激光扫描点云构网方法
基于椭球面投影的散乱点云建立三角格网方法
第19卷第4期测绘工程Vol.19l .42010年8月EN GINEERING OF SURVEYING AND MAPPINGAug.,2010基于椭球面投影的散乱点云建立三角格网方法郑德华,庞逸群,曹操(河海大学土木工程学院,江苏南京210098)摘要:空间点云数据建立三角格网是三维激光扫描数据处理中重要的处理内容之一。
已有的点云三角格网建立方法的网形结构良好,但存在数据量大、计算效率低的特点。
提出借助椭球面进行高斯投影建立点云的空间三角格网建立方法,有效地实现四周型点云数据格网建立过程。
结合某矿井点云数据实例,对基于圆柱面和椭球面投影的两种方法建立的三角格网进行对比,结果表明,利用椭球面投影法建立三角格网能更有效地建立顶部和底部点云数据的拓扑关系。
关键词:散乱点云;三角格网;椭球面投影;高斯投影中图分类号:P 226文献标志码:A文章编号:100627949(2010)0420019205Triangular grid establishment based on disordered pointcloud of ellipsoidal surface projectionZH ENG De2hua,PA NG Yi 2qun,CAO Cao(College of Civil Engineer ing,Hoha i Univer sity,Nanjing 210098,China)Abstr act:The spatial point cloud data to establish a tr iangular grid in 3D laser scan data processing is one important process.Previous methods of establishing triangular gr id are shape and structurally sound,but have problem to calculate the characteristics of low efficiency with large amount of points.In this paper,carried out with Gaussian ellipsoid pr ojection for the establishment of point cloud to establish triangular grid method,effective implementation of the surr ounding grid-based point cloud data building bination of point cloud data instance of a mine,based on cylindrical surface and the ellipsoid projection to establish a triangular grid of two methods were compared;results showed that the use of ellipsoid to es2tablish a triangular grid projection method is more effective in building the top and bottom of the points cloud data topology.Key words:disordered point cloud;tr iangular mesh;ellipsoidal surface projection;Gauss projection收稿日期基金项目江苏省交通科学研究计划项目(Y )作者简介郑德华(),男,副教授,博士三维激光扫描目前已广泛应用于计算机可视化、人工智能以及逆向工程等方面,三角格网贯穿于三维激光点云数据处理的整个过程。
地面三维激光扫描点云数据处理及建模

地面三维激光扫描点云数据处理及建模
在地面三维激光扫描中,传感器通过发射激光,将其反射后接收到的信号转化为点云数据,并最终形成三维模型。
点云数据处理是整个建模过程中不可或缺的步骤,它包括点云数据的清洗、滤波、配准、分割与特征提取等。
首先,点云数据的清洗是对采集到的数据进行初步处理,去除噪声、杂乱点以及无效数据,为后续处理提供可靠的数据基础。
其次,通过滤波处理对点云数据进行过滤,可以避免由于随机噪声、光照反射或折射等原因导致的数据异常,帮助从海量数据中选取有价值的信息。
常用的滤波方法有平均积分法、高斯滤波、中值滤波等。
随后,对多组点云数据进行配准,使得其尽可能吻合同一场景不同视角的点云数据,构建大尺度、高精度的三维模型。
此外,对于复杂的场景,需要进行分割与特征提取,以便将不同实体进行分割,从而更好地绘制出场景的结构。
在点云数据处理的基础上,进一步进行建模。
建模有几种方法,包括三角化、贴合法和分组法。
三角化法相对简单,它将每个点看作三角形的顶点,并通过连线构建三角形面片。
贴合法则是将点云数据与现有的CAD模型或建模软件结合,完成建模过程。
分组法则是通过将点云数据分成不同组,然后分别进行建模。
这些方法都有各自的优劣。
最后,需要进一步进行优化和编辑,确保生成的三维模型符合设计要求,呈现精美而真实的效果。
优化方式包括点云拟合,曲面重建,模型优化等。
编辑的方式包括调整模型的颜色,纹理,质感等。
综上所述,点云数据处理和建模是地面三维激光扫描的关键步骤,能够协助建筑、工程、文化保护等领域,构建高精度、真实的三维模型,为实时监测、分析和管理提供有力支撑。
点云科技扫描仪软件操作手册
武汉点云科技有限公司点云三维数据处理系统[英文名: DY 3D Scanner-LS版本号:V1.0]用户操作手册目录第一章引言1.1编写的目标 (3)1.2术语定义 (3)第二章软件系统概述2.1目标 (4)2.2功能模块 (4)2.3软件运行的软硬件环境 (4)2.4技术特点 (4)第三章软件的安装过程及注意事项3.1软件安装 (5)3.2软件狗的使用 (8)第四章软件的功能描述4.1软件界面 (8)4.2仪器连接 (9)4.3数据采集 (12)4.4数据预处理 (23)4.5产品 (55)4.6数据交换 (71)第一章引言1.1 编写的目标本手册的目的在于为用户介绍DY 3D Scanner-LS系统软件的功能,以及如何正确有效地使用这些功能的操作流程,为用户的操作提供规范化的指导。
1.2术语定义点云三维点坐标集合标靶特殊用途的点的三维坐标影像与点云配准后的相片外业外部作业内业室内作业内方元素相机的数字参数外方元素确定摄影光束在物方的几何关系的基本数据纹理贴图将影像与点云结合形成三维真实景观站点拼接通过坐标系转换关系将多个站点下的点云统一到大地坐标系下DEM 数字高程模型(一种摄影测量学专用的文件格式,分为文本和二进制两种,存储的是一个区域内的高程值)DOM 数字正射影像图(Digital Orthophoto Map,DOM)是以航摄像片或遥感影像(单色/彩色)为基础,经扫描处理并经逐像元进行辐射改正、微分纠正和镶嵌,按地形图范围裁剪成的影像数据,并将地形要素的信息以符号、线画、注记、公里格网、图廓(内/外)整饰等形式填加到该影像平面上,形成以栅格数据形式存储的影像数据库。
它具有地形图的几何精度和影像特征。
OBJ 是Alias|Wavefront公司为它的一套基于3D建模和动画软件"Advanced Visualizer"开发的一种标准3D模型文件格式xyz 记录三维坐标系中的x坐标、y坐标和z坐标的一种文本文件格式dxf AutoCAD(Drawing Interchange Format或者Drawing Exchange Format) 绘图交换文件DXF。
点云数据获取方法
点云数据获取方法
点云数据是由三维空间中的离散点组成的集合,它是数字化的物体表面的几何形状。
获取点云数据的方法有多种,下面将介绍几种常见的方法:
1. 激光测距法
激光测距法是通过激光发射器向物体表面发射激光,在激光照射到物体表面后,利用光电转换器将反射回来的激光信号转化为电信号,并通过算法计算出物体表面的三维坐标,从而得到点云数据。
2. 三维扫描仪法
三维扫描仪是一种通过激光或者光学方式对物体表面进行扫描,获取点云数据的设备。
其工作原理是通过控制扫描仪的扫描角度和距离,将物体表面的信息转化为点云数据。
3. 结构光法
结构光法是一种通过投射光栅模式进行三维扫描的方法,它通常使用投影仪投射特定的光栅模式,然后通过相机捕捉反射回来的图像,从而获取物体表面的三维坐标,得到点云数据。
4. RGB-D相机法
RGB-D相机可以同时获取彩色图像和深度图像,通过将深度图像转化为点云数据,可以得到物体表面的三维形状信息。
此方法适用于小范围物体的三维扫描。
总之,不同的点云数据获取方法适用于不同的应用场景,选择合适的方法是获取高质量点云数据的关键。
激光点云分类基本方法
激光点云分类的基本方法主要包括以下几个步骤:1.点云数据预处理:建立电力线三维结构特征指标体系。
基于原始点云数据,噪声、地面、建筑物等显著非电力线点的过滤机制,将更加准确地区分非电力线点,减少后续处理数据量,同时保证可能电力线点的完整筛选。
2.地面点过滤和DTM 生成:根据原始LiDAR 点云进行地面点过滤和DTM(数字地面模型)生成以提取所有非地面点。
3.电力线候选点滤波:根据电力线布设规范,选择地面一定高度(如4m)以上的非地面点作为电力线候选点。
4.多尺度邻域类型选取:使用给定点X 的局部三维空间形状结构进行电力线分类。
初步选取两类邻域:单一尺度邻域和多尺度邻域,并在每个尺度上分别选取球形邻域、柱状邻域和K 值邻域 3 种邻域类型。
每种邻域类型的限制参数为半径和K 值。
5.形状结构特征提取:结合LiDAR 点云数据中电力线与林木、建筑物等地物相互遮挡、混杂的问题和电力线快速自动化提取的需求,针对已有的基于结构形状的统计分析和图像处理分类方法中的不足,通过研究在不同复杂场景下电力线点云数据的形状结构特征,确定其关联参数。
6.SVM 分类:基于前述的候选电力线点云数据集及其三维形状结构关联参数,设计和研究基于机器学习监督分类的电力线智能分类模型。
设计机载LiDAR 点云数据的SVM(支持向量机)分类算法,以候选电力线点云的三维形状结构关联参数作为特征向量,以是否属于电力线点作为结果种类,构建电力线SVM 分类算法的训练样本和测试样本。
使用五重交叉对比分析来验证评估分类器的准确性。
这些方法在激光点云分类中各有优势,可以根据实际应用场景和需求进行选择和优化。
简述地面三维激光扫描数据采集流程

简述地面三维激光扫描数据采集流程一、地面三维激光扫描的基本原理地面三维激光扫描是利用激光束对地面上的物体进行扫描,通过测量激光束从发射到接收经过的时间,计算出激光束在空间中的坐标位置,从而得到物体的三维坐标信息。
激光扫描仪通常由激光发射器、接收器、扫描镜等组成,其中激光发射器发射出的激光束被扫描镜反射,经过接收器接收并记录下激光束的时间和强度。
二、地面三维激光扫描数据采集流程地面三维激光扫描的数据采集流程通常包括数据准备、设备设置、扫描操作和数据处理等步骤。
1. 数据准备在进行地面三维激光扫描之前,需要准备好相关的数据,包括地面区域的范围、扫描任务的目的和要求等。
同时,还需要对扫描区域进行清理,清除障碍物和遮挡物,以保证扫描的准确性和完整性。
2. 设备设置将激光扫描仪放置在合适的位置,并与电脑或数据采集设备连接。
根据实际情况设置扫描仪的参数,如扫描分辨率、扫描速度、扫描角度等。
同时,还需校准扫描仪,确保扫描仪的准确性和稳定性。
3. 扫描操作启动激光扫描仪,开始进行扫描操作。
通常,扫描仪会自动水平和垂直扫描地面区域,并记录下每个扫描点的坐标位置和强度值。
扫描过程中需要保持扫描仪的稳定,避免震动和移动,以保证数据的准确性。
4. 数据处理扫描完成后,将采集到的数据导入到计算机或数据处理软件中进行处理。
首先,对原始数据进行滤波和去噪处理,去除不必要的干扰和噪声。
然后,根据扫描点的坐标位置和强度值,生成地面的三维模型或点云数据。
最后,对数据进行分析和处理,提取出需要的信息,如地形、建筑物、道路等。
三、总结地面三维激光扫描是一种高精度、高效率的数据采集方法,广泛应用于地理测绘、城市规划、建筑设计等领域。
通过本文的介绍,我们了解到了地面三维激光扫描的基本原理和数据采集流程。
希望本文能为读者对地面三维激光扫描有一个初步的了解,并对相关领域的应用提供帮助。
激光点云技术原理

激光点云技术原理⼀、引⾔激光点云技术,⼜称为激光雷达扫描技术,是⼀种通过激光测距原理获取物体表⾯三维坐标信息的技术。
近年来,随着科技的快速发展,激光点云技术在测绘、机器⼈导航、⽆⼈驾驶、⽂物保护等领域得到了⼴泛应⽤。
本⽂将详细介绍激光点云技术的原理、特点及应⽤。
⼆、激光点云技术原理激光点云技术的核⼼原理是利⽤激光测距技术获取物体表⾯的三维坐标信息。
激光测距技术的基本原理是:通过测量激光脉冲从发射器到⽬标物体表⾯再反射回接收器的时间差,结合激光的传播速度,计算出发射器到⽬标物体的距离。
激光扫描仪通常采⽤脉冲激光测距技术或相位差激光测距技术。
1.脉冲激光测距技术脉冲激光测距技术是通过测量激光脉冲从发射器到⽬标物体表⾯再反射回接收器的时间差来计算距离的。
当激光脉冲发射后,计时器开始计时,当反射光被接收器接收时,计时器停⽌计时。
根据计时器的读数和激光的传播速度,可以计算出发射器到⽬标物体的距离。
2.相位差激光测距技术相位差激光测距技术是通过测量激光发射器和接收器之间的相位差来计算距离的。
这种技术需要在激光发射器和接收器之间建⽴⼀个稳定的振荡频率,然后测量激光往返过程中的相位差。
根据相位差和振荡频率,可以计算出发射器到⽬标物体的距离。
激光扫描仪通过⾼速旋转的镜⾯或者振镜等扫描装置,将激光脉冲以极快的速度扫描到⽬标物体表⾯。
当激光脉冲接触到物体表⾯时,部分光线被反射回扫描仪。
通过测量反射光的强度和时间,激光扫描仪可以获得⽬标物体表⾯的三维坐标信息。
这些坐标信息以点的形式存储在计算机中,形成所谓的“点云”数据。
三、激光点云技术的特点1.⾼精度:激光点云技术具有很⾼的测距精度和⻆度分辨率,可以获得⾼精度的三维坐标信息。
2.⾼速度:激光扫描仪的扫描速度⾮常快,可以在短时间内获取⼤量的点云数据。
3.⾮接触性:激光点云技术可以在不接触⽬标物体的情况下进⾏测量,避免了传统测量⽅法对物体可能造成的损坏。
4.适⽤性⼴:激光点云技术适⽤于各种复杂场景和环境条件,如室外地形测量、室内建筑测量、⽔下地形测量等。
机载激光雷达数据处理方法综述
机载激光雷达数据处理方法综述摘要:机载激光雷达(Airborne LiDAR)技术在遥感领域起到了至关重要的作用,可以获取高精度的地理空间数据。
然而,机载激光雷达数据的处理是一个复杂且关键的任务,直接影响到数据的准确性和可靠性。
本文综述了当前机载激光雷达数据处理的常用方法,包括预处理、数据配准、分类和特征提取等方面,旨在为相关研究者提供参考。
1. 引言机载激光雷达是一种通过发射激光束并测量其返回信号的遥感技术。
它可以实时获取地物的高分辨率、三维几何信息,成为地理空间数据获取的重要手段。
机载激光雷达数据的处理涉及到预处理、数据配准、分类和特征提取等步骤,需要考虑大量的技术和算法。
2. 机载激光雷达数据处理方法2.1 预处理预处理是机载激光雷达数据处理的第一步,旨在去除噪声和杂散信息,提高数据质量。
常用的预处理方法包括:(1)去除离群点:通过设定阈值,排除距离激光波束过远或过近的数据点。
(2)去除地面点:利用地面模型,将地面上的点云数据挑选出来,去除非地面点。
(3)去除植被覆盖:通过对植被的检测和分析,去除植被对地面点云的遮挡。
2.2 数据配准数据配准是将不同位置、不同扫描线的激光雷达数据进行对齐,从而达到全区域的无缝拼接。
常用的数据配准方法包括:(1)球面配准:将球面上不同点云数据投影到一个球面上,通过优化球面上的变换参数实现数据的配准。
(2)特征匹配:通过提取数据点云的特征,如表面几何特征和颜色特征,利用特征匹配算法估计不同点云之间的变换关系。
2.3 分类分类是机载激光雷达数据处理中的重要步骤,旨在将点云数据分为不同的地物类别。
常用的分类方法包括:(1)基于形状特征的分类:通过分析点云数据的形状特征,如表面曲率和点云密度,将其分为建筑物、树木、道路等类别。
(2)基于反射率的分类:通过分析点云数据的反射率,将其分为不同的地物类别。
不同地物对激光束的反射率有所不同,可以通过反射率的阈值进行分类。
2.4 特征提取特征提取是机载激光雷达数据处理中的关键步骤,旨在提取有效的地物信息。
激光点云构建路面方程

激光点云构建路面方程
激光点云是一种通过激光扫描仪获取的三维点云数据,它具有高精度和高密度的特点。
在道路建设和车辆导航等领域,通过激光点云构建路面方程是非常重要的一项任务。
构建路面方程的过程可以分为三个步骤:数据采集、数据预处理和方程拟合。
首先,我们需要使用激光扫描仪对道路进行扫描,获取大量的点云数据。
这些点云数据记录了道路表面的各个点的坐标信息。
在数据预处理阶段,我们需要对采集到的点云数据进行滤波和去噪处理,以去除由于传感器误差或环境干扰引起的噪声点。
然后,我们可以通过对点云数据进行分割和聚类,将道路点云与其他物体点云进行区分。
接下来,我们需要根据预处理后的点云数据拟合路面方程。
常用的方法是使用最小二乘法进行拟合,通过寻找最小化残差的参数来确定路面方程的系数。
拟合的路面方程可以表示为:z = ax + by + c,其中a、b和c分别表示平面方程的系数。
构建路面方程后,我们可以利用它进行道路分析和车辆导航。
例如,可以通过计算车辆相对于路面的高度差来判断车辆是否偏离了道路中心线,从而实现车道偏离预警功能。
此外,还可以根据路面方程来进行道路平整度评估,从而提供道路维护和修复的参考依据。
总的来说,通过激光点云构建路面方程是一项重要的技术,它可以为道路建设和车辆导航等领域提供精确的路面信息。
随着激光扫描仪和数据处理算法的不断发展,我们相信在未来会有更多的创新和应用。
基于球面投影的散乱点云三维建模算法实现与效果分析
Th m pl m e t to l o ih f t r e d m e s o a o lng t o nt ei e n a i n a g r t m o h e — i n i n lm de i o p i
co d b sdo p eia u fc rj cina defc n lss lu ae n s h rc l ra ep o t n fet ayi s e o a
但 是 由于该 方法 需 要 涉及 到 迭 代 计 算 , 正 算公 式 且
复杂 , 应用椭 球 面投 影 法 建 网 效率 明显 低 于 圆 柱 面 投 影法 , 随 着 点 数 的增 多 , 种 差 异 越 明显 。为 且 这 此 , 文从 提高 椭球 面投 影效率 的角度 出发 , 出球 本 提 面投影 法 。详细论述 了基于球面投影的散 乱点云三维
第 2 O卷第 3期
21 0 1年 6月
测
绘
工
程
VoI O № . l2 3
ENGI NEERI NG U RVEYI OF S NG AND AP NG M PI
J n 2 1 u .,0 1
基 于 球 面 投 影 的 散 乱 点 云 三 维 建 模 算 法 实 现 与 效 果 分 析
adP ee t n n r v n i ,W u a nv riy o h nU ie st ,W u a 3 0 9 C n ) h n4 0 7 , hia
AbtatTh lo i m f h e—i n in l d l gt on lu ae ns h r a s raepoet n src: e g r h o redme s a mo ei p it o db sdo p ei l ufc rjci a t t o n o c c o
激光扫描技术原理与点云处理方法介绍

激光扫描技术原理与点云处理方法介绍激光扫描技术是一种基于激光测距原理的三维形态测量技术。
它通过向目标物体发射激光束,并测量激光束从发射到返回的时间差,从而获取目标物体的三维坐标信息。
激光扫描技术在工程测量、地形测绘、建筑设计等领域有广泛应用,成为了现代数字化信息获取的重要手段。
激光扫描技术主要包括两个核心部分:激光器和接收器。
激光器会产生脉冲激光束,并将其发射到目标物体上。
接收器则接收返回的激光束,并测量返回激光束的时间差。
通过记录发射和返回激光束的时间差,以及激光在空气中的传播速度,我们可以计算出目标物体到激光扫描仪的距离。
在实际扫描过程中,激光扫描仪会不断地旋转或移动,从而实现对目标物体的全方位扫描。
每当目标物体上有一个点被扫描到时,激光扫描仪会测量该点的三维坐标,并将其保存在一个称为点云的数据集中。
点云是由大量三维点组成的数据集,每个三维点都包含了目标物体在空间中的位置信息。
得到点云数据后,我们需要对其进行处理和分析,以提取出所需的信息。
点云处理主要包括点云预处理、特征提取和点云配准等步骤。
在点云预处理中,我们会对点云数据进行滤波、去噪等处理,以去除一些无用或异常的点。
特征提取则是从点云数据中提取出一些具有代表性的特征信息,如曲率、法向量等。
通过将不同扫描位置的点云配准,我们可以获取目标物体的完整形态。
除了点云处理,激光扫描技术还可以与其他技术相结合,实现更多应用。
例如,结合图像处理技术,可以实现激光扫描图像的纹理重建。
这样可以使得点云数据不仅包含几何信息,还能包含纹理信息,提高数据的可视化效果。
此外,激光扫描技术还可以与机器学习算法相结合,实现对点云数据的自动识别和分类。
这对于工程测量、建筑设计等领域的自动化处理具有重要意义。
总之,激光扫描技术是一种高效、精确的三维形态测量技术。
通过激光扫描技术,我们可以获取目标物体的几何和纹理信息,从而实现对其进行全面的分析和处理。
随着技术的不断发展,激光扫描技术在各个领域的应用将会越来越广泛,为现代数字化信息获取和处理提供更多可能性。
点云分割的五种方法

点云分割的五种方法点云分割是计算机视觉和机器学习的一个重要任务,它的目标是将三维点云数据中的不同对象或部分进行分割和识别。
下面将介绍五种常见的点云分割方法。
1.基于几何特征的方法:这种方法基于点云数据的几何特征,例如点的法线、曲率、形状度量等,来进行分割。
常用的算法包括基于曲率阈值的方法、基于区域生长的方法和基于支持向量机的方法。
其中,基于曲率阈值的方法通过设定曲率阈值,将曲率高于该阈值的点作为边缘点进行分割;基于区域生长的方法则从一个种子点开始,通过逐渐添加周围点来构建一个连通的区域,直到达到预设的停止条件;而基于支持向量机的方法则通过训练一个二分类器来区分不同的点云区域。
2.基于深度学习的方法:近年来,深度学习在点云分割任务中取得了很大的成功。
这种方法利用深度神经网络来自动学习点云数据的特征表示和分割规则。
常见的方法有基于3D卷积神经网络(CNN)的方法和基于图卷积网络(GCN)的方法。
其中,3DCNN通过在点云上进行卷积操作来提取局部和全局特征,进而进行分割;GCN则通过在点云上构建图结构,利用图卷积操作来学习点云之间的依赖关系,得到更准确的分割结果。
3.基于形状特征的方法:这种方法通过提取点云数据的形状特征,例如球面谐波系数、形状描述子等,来进行分割。
常用的方法有基于球面谐波函数分析的方法和基于形状描述子的方法。
其中,球面谐波函数分析方法将点云数据投影到球面谐波函数空间,通过分析其系数来实现分割;形状描述子方法则通过描述点云数据的局部和全局几何性质来进行区域分割。
4.基于语义信息的方法:5.基于混合方法的方法:这种方法将上述不同的方法进行组合和融合,充分发挥它们的优势。
常见的方法有多尺度分割方法和多模态分割方法。
其中,多尺度分割方法通过在不同的尺度下对点云数据进行分割,然后将结果进行融合,得到更准确的分割结果;而多模态分割方法则将来自于不同传感器(例如相机和激光雷达)的点云数据进行融合,提高分割的鲁棒性和准确性。
地面三维激光扫描的技术介绍
地面三维激光扫描的技术介绍一、激光扫描原理地面三维激光扫描技术是一种通过激光测距和角度测量来获取物体表面三维坐标的测量技术。
它利用激光发射器向目标物体发射激光束,通过测量激光束从发射到返回的时间,计算出激光束与目标物体之间的距离。
同时,通过测量激光束的角度,可以确定目标物体在水平面上的坐标。
通过多个测量的点云数据,可以重建出目标物体的三维模型。
二、扫描精度地面三维激光扫描的精度通常取决于多种因素,包括激光测距的精度、角度测量的精度、目标物体的反射性质以及环境条件等。
一般来说,地面三维激光扫描的精度可以达到毫米级别,对于一些精细的物体或者需要高精度测量的应用场景,其精度甚至可以达到亚毫米级别。
三、扫描速度地面三维激光扫描的速度通常取决于扫描仪器的性能以及目标物体的表面性质。
一般来说,地面三维激光扫描的速度可以很快,特别是在对大型物体进行扫描时,其扫描速度通常可以达到数百万个点/秒。
四、扫描范围地面三维激光扫描的范围通常取决于扫描仪器的视场角以及目标物体的大小和形状。
一般来说,地面三维激光扫描的范围可以从几米到数百米不等,对于一些大型的建筑物或者地形地貌等,其扫描范围甚至可以达到数公里。
五、数据处理地面三维激光扫描的数据处理主要包括点云数据的预处理、三维模型的重建以及后处理等步骤。
点云数据的预处理主要包括去除噪声、点云数据的配准和拼接等;三维模型的重建主要包括利用点云数据构建三角网格模型或者表面模型等;后处理主要包括对三维模型的平滑处理、简化处理以及格式转换等。
六、应用领域地面三维激光扫描技术被广泛应用于建筑领域、考古领域、地形测量领域、城市规划领域以及灾害监测领域等。
在建筑领域,可以利用地面三维激光扫描技术对建筑物进行数字化建模和测量;在考古领域,可以利用地面三维激光扫描技术对遗址进行数字化建模和保护;在地形测量领域,可以利用地面三维激光扫描技术对地形地貌进行高精度测量和建模;在城市规划领域,可以利用地面三维激光扫描技术对城市进行数字化建模和规划;在灾害监测领域,可以利用地面三维激光扫描技术对灾害现场进行数字化建模和监测。
详述点云和像数据的采集与处理
详述点云和像数据的采集与处理三维激光扫描技术是近年来国内外测绘领域研究的热点,自20世纪90年代出现后,已被应用到测绘工程、結构测量、文物古迹保护、娱乐等多个领域。
与传统全站仪单点测量方式相比,三维激光扫描能在短时间内获取大量目标点,数据精度高,能够很好的满足建筑三维建模对原始测量数据的需求,还提高了外业数据采集的效率。
城市建筑三维模型是数字城市的基础建设内容之一。
如何利用三维激光扫描技术快速完成城市建筑现状数据的采集并完成三维建模是目前亟需解决的问题。
本文将介绍如何结合三维激光扫描与摄影测量技术,进行建筑三维模型制作。
一、三维激光扫描原理地面三维激光扫描系统主要由激光扫描仪、控制器、电源和软件等组成。
其中激光扫描仪的主要构造包括激光测距仪和一组可以引导激光并以均匀角速度扫描的反射棱镜。
通过记录激光束从发射到反射回的时间差或相位差可以计算出测站到扫描点的斜距S;在加上测量出的扫描水平和垂直方向角α和θ,就可以算出每个扫描点与测站的空间相对坐标了。
如果测站点的空间坐标是已知的,那么就能够最终算出所有扫描点的三维空间坐标[1]。
图1 三维激光扫描中点坐标计算原理二、数据采集与处理(一)控制点测量在对建筑物进行扫描之前,要先对测区进行踏勘工作。
为后期数据处理提供点云配准和定向的参数,需要利用RTK测量图根控制点的坐标。
(二)外业激光扫描与影像采集外业激光扫描通常按照布设控制网进行静态扫描。
由于扫描时其他物体遮挡,需要从多个站点进行扫描,同时利用靶标,在后期拼接出完整的建筑物点云[2]。
对有测量控制点的扫描,需要两个已知位置的靶标,就能确定点云在坐标系中的位置。
同时,利用数码相机拍摄建筑物影像照片,重点对扫描时被遮挡的部分如屋顶处进行详细拍摄。
(三)点云拼接与影像配准初始的点云仅具有距离、回波值、回波强度等信息,在点云定向之后才能算出它们的坐标信息。
由于扫描获得的每一站数据都是以扫描仪位置为原点的局部坐标系[3],所以需要进行点云拼接,将它们转化到同一坐标系中。
利用球心投影与线特征的点云与全景影像配准
利用球心投影与线特征的点云与全景影像配准岳明宇;康志忠【摘要】针对车载移动测量系统信息融合问题,提出了一种点云与全景影像配准的解决方案.利用车载移动测量系统记录的位置和姿态信息将三维点云进行站心化和姿态调整,然后利用球心投影纠正预先选定的全景影像目标区域的形变使之可以提取线状特征,在经过站心化和姿态调整的点云数据中提取与之对应的线状特征,同样利用球心投影计算点云在目标区域的投影坐标初值,最后利用影像线特征方程和点云投影坐标初值通过条件平差获得点云投影改正量,进而优化配准.试验结果表明,该方法计算简单,配准效果较好.%In this paper,a new method of registration of panoramic images with point clouds is proposed for mobile measurement system.Firstly,the position and posture information collected by the mobile measurement system is used to pretreat point clouds.Then,gnomonic projection is used to correct the deformation of the selected part of the panoramic image.Line features can be extracted from the part after correction.Gnomonic projection is also used to calculate the initial value of projection coordinates of point clouds in the target area.Finally,use the equation of the line features and initial value of projection coordinates of point clouds to calculate the correction by adjustment of conditions.【期刊名称】《遥感信息》【年(卷),期】2017(032)001【总页数】7页(P10-16)【关键词】全景影像;激光点云;球心投影;线特征;配准【作者】岳明宇;康志忠【作者单位】中国地质大学,北京100083;中国地质大学,北京100083【正文语种】中文【中图分类】TP751车载移动测量系统集成激光扫描仪、全景相机、定位定姿系统、同步控制系统、车程编码器等多种传感器,广泛应用于三维城市数据采集。
基于深度差的离群点识别与修正方法
基于深度差的离群点识别与修正方法李嘉;林欢;蓝秋萍;马符讯【摘要】离群点的存在会给点云后续处理与应用带来干扰,文中针对扫描过程中快速通过的车辆或行人造成的离群点提出基于深度差的识别与修正方法.分析此类离群点的产生机理,并运用基于球面投影的点云构网方法构建点云的拓扑关系,在此基础上提出根据深度差识别离群点的方法以及兼顾不同点云质量的阈值自动选择方法;设计了基于二次曲面拟合的点云修复方法;利用真实隧道数据进行实验,实验结果验证了文中方法的有效性和稳定性.【期刊名称】《测绘工程》【年(卷),期】2014(023)011【总页数】6页(P1-6)【关键词】离群点;三角构网;测距异常;二次曲面拟合;插值【作者】李嘉;林欢;蓝秋萍;马符讯【作者单位】河海大学,地球科学与工程学院,江苏南京210098;河海大学,地球科学与工程学院,江苏南京210098;河海大学,地球科学与工程学院,江苏南京210098;河海大学,地球科学与工程学院,江苏南京210098【正文语种】中文【中图分类】P23三维激光扫描系统已经广泛应用于已建成并投入运营的高速公路桥梁和隧道的三维重建与变形检测中,扫描过程中快速经过的车辆和行人会在扫描点云中留下“断续”、“跳跃”的粗差点,也被称为离群点[1]。
本文提出的离群点识别及修正方法只针对扫描过程中车辆和行人遮挡造成的这类离群点,所以后文提到的离群点特指此类离群点。
如图1所示为三维激光扫描仪扫描的隧道点云,隧道内杂乱的点即为快速通过车辆造成的离群点。
三维激光扫描仪是按照倒“Z” 字形的顺序扫描[2],快速通行的车辆会对扫描目标产生临时遮挡,阻碍激光光束到达实际扫描物体表面,从而在移动车辆位置产生离群点,并造成被遮挡目标表面的数据缺失。
经分析离群点具有如下特性:1)离群点与相应物体表面缺失点在同一视线方向,即两者的水平角值和竖直角值相等,只是深度值大小不同;2)离群点的大部分顺序扫描邻近点都在扫描物体表面,离群点与它们的距离较大。
点云投影地面方法
点云投影地面方法全文共四篇示例,供读者参考第一篇示例:点云投影地面方法是一种利用激光或者摄像头采集的点云数据,通过特定的算法处理,并将其投影到地面模型上的技术手段。
这种技术在各行业都有广泛的应用,比如城市规划、建筑设计、道路施工等领域。
本文将介绍一些常用的点云投影地面方法,以及它们的优缺点和适用场景。
一、点云投影地面方法的基本原理点云投影地面方法的基本原理是通过对采集到的点云数据进行处理,找到其中代表地面的点,并将其投影到地面模型上。
这个过程一般可以分为以下几个步骤:1. 点云数据的采集:点云数据可以通过激光雷达、摄像头等设备进行采集。
这些设备可以将周围环境的几何信息转换为点云数据,包括点的位置、颜色、反射强度等信息。
2. 点云数据的预处理:采集到的点云数据可能包含一些噪声点或者无效点,需要通过滤波、去噪等方法对数据进行预处理,以提高后续处理的效果。
3. 地面点的提取:在预处理之后,需要通过一些算法找到代表地面的点,比如地面的斜率、高度等属性。
常用的算法包括RANSAC、PCA等。
4. 点云投影到地面模型:找到地面点之后,可以通过插值、投影等方法将这些点投影到地面模型上,从而得到一个更加清晰的地面模型。
1. 地面分割法:地面分割法是一种简单直观的方法,通过对采集到的点云数据进行分割,找到其中代表地面的点。
这种方法适用于地面比较规则的场景,但在地形复杂的情况下效果不佳。
2. 地面拟合法:地面拟合法是一种通过对地面点进行拟合,得到地面模型的方法。
在这种方法中,常用的模型包括平面模型、曲面模型等,可以更好地适应地形的变化。
三、点云投影地面方法的优缺点和适用场景1. 优点:(1)能够快速准确地获取地面的地形信息,为后续的规划设计提供重要依据。
(2)可以实时检测地面的变化情况,及时处理地面问题。
(3)适用于各种地形情况,包括平地、山地等。
(1)在复杂地形条件下,准确提取地面点的难度较大。
(2)需要耗费较长的处理时间,对计算资源要求较高。
基于单点激光测距的扫描成像技术
基于单点激光测距的扫描成像技术发布时间:2022-07-07T09:24:28.221Z 来源:《科学与技术》2022年第3月5期作者:段声原,庞思洋,罗钰清[导读] 在科考研究中,面对未知的环境段声原,庞思洋,罗钰清陆军装备部驻重庆地区军事代表局摘要:在科考研究中,面对未知的环境,科考人员也很难识别探究过程中的危险,面临着很多潜在的安全隐患。
鉴于此,为了确保科学探测的精准性,准确识别目标物体的距离、尺寸等参数,并有效解决传统二维成像在实际工作中的弊端,为后续工作提供准确的数据支撑,单点激光测距的扫描成像技术应运而生,形成的3D成像精度更高、数据更加准确、所测内容更加详实。
所以,本文就对这一技术进行了深入的研究,旨在将其更好的应用到后续科考研究中。
关键词:激光技术;单点激光测距;扫描成像就当前工作来看,科学探查工作都是以清晰度较高的摄像机进行目标物体成像的获取,以二维形态为主,这种方法只能帮助其了解未知环境的外观信息,但是,科考探测是一项危险系数极高的工作,科考人员需要对位置环境下的物体信息进行近距离的观察和测量,在这种情况下,只依靠传统的二维成像和2D数据很难满足现代科学发展的需求。
鉴于此,激光测距技术逐渐得到了较好的发展,在无接触测量的状态下,可以帮助科考人员获取更加准确的距离信息,基于单点激光测距测量每个测距点的信息,为现代科学勘测和探究提供了有利条件。
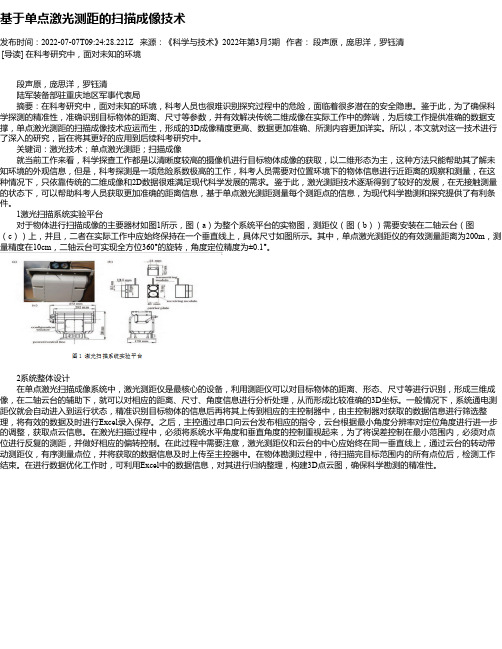
1激光扫描系统实验平台对于物体进行扫描成像的主要器材如图1所示,图(a)为整个系统平台的实物图,测距仪(图(b))需要安装在二轴云台(图(c))上,并且,二者在实际工作中应始终保持在一个垂直线上,具体尺寸如图所示。
其中,单点激光测距仪的有效测量距离为200m,测量精度在10cm,二轴云台可实现全方位360°的旋转,角度定位精度为±0.1°。
2系统整体设计在单点激光扫描成像系统中,激光测距仪是最核心的设备,利用测距仪可以对目标物体的距离、形态、尺寸等进行识别,形成三维成像,在二轴云台的辅助下,就可以对相应的距离、尺寸、角度信息进行分析处理,从而形成比较准确的3D坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第38卷 第1期测 绘 学 报Vol.38,No.1 2009年2月Acta Geodaeti ca et Cartogra phica Si nicaFeb.,2009文章编号:1001 1595(2009)01 0048 07基于球面投影的单站地面激光扫描点云构网方法张 帆,黄先锋,李德仁武汉大学测绘遥感信息工程国家重点实验室,湖北武汉430079Spherical Projection Based Triangulation for One Station Terrestrial La ser Scanning Point CloudZHANG Fan,HUANG Xia n feng,LI D e renSta te Key La bora tory of Information Engineeri ng i n Surveying,M a ppi ng a nd R emote Sensing,Wuh a n University,W uh a n430079,Ch i naAbstra ct :A Tri angul ated Irregula r N etwork (T IN)genera ting al gorithm is proposed for one sta tion terrestria l l aser scanning poi nt cl oud.The al gori thm is i ncrementa l insertion generati ng al gorithm usi ng spheri ca l projecti on stra te gy.Previ ous 3D TIN genera ting algori thms ha ve probl em to get correct neighbori ng rela tion between poi nts,so,spheri ca l projection strategy is employed to resolve the probl em.The stra tegy is on the basi s of the cha racteri sti c of one stati on terrestria l laser scanning point cl oud.Incremental i nserti on generati ng a lgorithm ta kes less computer spa ce resource,so the al gorithm is suit for the data set w it h l arge amount of poi nts.Som e deta il s of generati ng spheri ca l Del auna y T IN are descri bed,they i ncl ude:the data struct ure of the al gorithm ;t he definiti on of t he projec tive sphere;generati ng of i niti al TIN;the met hod to judge positi ona l rel ati onship between geometr ic objects;the method of di rected searchi ng for tri angle a nd the spherical local optimi zati on procedure.The processes are opti mized to improve the al gorithm s efficiency.There are tw o experiments compa ring the proposed a lgorithm w i th Geom a gic Studio to test the performa nce of the al gori thm.The fi rst experiment revea ls that the proposed al gori thm is more effi ci ent tha n the Geoma gic St udi o,a nd the second experi ment show s that the proposed a lgorithm coul d get the better resul ts to generat e T IN.Key w ords :terrestri al l aser scanning;tri angul ati on;spherical D ela unay TIN摘 要:为正确判断点与点之间的邻接关系,结合单站地面激光扫描点云数据的特性,提出利用球面投影对其构建三角网的方法,讨论球面Del auna y 构网方法的若干细节。
采用球面有向搜索和球面LOP 局部优化算法,提高构网时间效率。
实验表明本方法能快速、有效地对单站激光扫描点云构网。
关键词:地面激光扫描;三角化;球面Del auna y 三角网中图分类号:P 235 文献标识码:A基金项目:国家863计划(2006AA 12Z 151);国家西部1 50000地形图空白区测图工程1 引 言地面激光扫描系统(Terrestrial Laser Scanner)能够快速获取目标表面精确而密集的点集,是一种高效的数据获取模式,在文物保护、工业零件检测、3维仿真、测绘等领域有着广泛的应用。
而实际应用中由于处理的需要,例如:可视化、数据简化等,通常需要对离散点进行三角化构成三角网。
3维离散点的三角网构建算法种类繁多,可分为直接法和间接法两大类[1]。
直接法是直接在3维空间中利用点与点之间的关系对点集构网,主要包括雕刻算法[2],距离函数算法和表面生长法等[3,4],此类方法的优点是用真3维T IN 较真实的描述对象的表面,但其最大的问题就是在点密度不均匀或存在噪声的情况下,难以判断点与点之间的真正邻接关系,以至于容易出现表面空洞、面片重叠、法向不一致等构网错误。
间接法主要指映射法,该类方法将局部的邻近点投影到切平面上进行2维三角化,然后拼接成整体的3维表面模型[5],这类方法将复杂的3维问题简化为2维问题,具有较高的效率,但是其结果依赖于K 邻域大小的选取[1],而且将3维点集平行投影到平面上也容易导致点与点之间的邻接关系判断错误。
为了解决正确判断点之间的邻接关系问题,第1期张 帆等:基于球面投影的单站地面激光扫描点云构网方法考虑到单站地面激光扫描点云数据的特点,如果将全部扫描点以中心投影的方式投影到以激光发射中心点为球心的球面,那么,投影点之间的邻接关系可以较真实地反映出扫描点间的邻接关系。
因此,本文利用中心投影的方式将单站激光扫描点云数据投影到一个球面上,在球面上进行构网,保证了点之间的正确邻接关系,同时通过改进的构网算法,可以获得较高的计算效率。
2 球面投影构网算法地面激光扫描仪扫描方式是底座固定,激光脉冲发射方向随着扫描头在垂直方向上下摆动,同时在水平方向上缓慢转动,通过记录激光脉冲的方向和经目标表面反射后返回的时间(或相位差)来计算目标表面3维坐标[6]。
当扫描视场较大时,如果将全部扫描点直接通过平行投影的方式投影到一个平面上,必然会产生点的重叠、遮挡等问题,构出的三角网无法正确反映对象表面的情况和表面点之间的邻接关系。
但是,扫描点可认为是由激光发射中心出发的射线与目标表面的交点,所以,所有扫描点对激光发射中心点都是可视的,如果将扫描点通过中心投影的方式投影到以激光发射中心点为球心的球面上则可避免上述问题。
文献[7]采用了这种投影方式对单站地面激光扫描数据进行构网,该算法先对扫描点分块,再先后通过球面中心投影和平行投影的方式将扫描点投影到平面上进行构网,最后将投影点保持构网关系反投影回其原始位置并对三角网进行拼接,该算法涉及多次投影和三角网拼接,实现较复杂。
本文将扫描点投影到球面后直接在球面上构网,再保持构网关系反投影到原始位置,算法实现简单,构网过程高效。
2维三角网中Delaunay三角网是惟一最优的[8],但是3维表面三角网不能遵循3维Delau nay构网准则来保证其唯一最优,因为3维Delaunay构网准则是对于3维实体模型而言的[9]。
本算法将数据点投影到球面后,在球面构网过程中可遵循球面Delaunay构网准则使其在球面最优,正确连接相邻点,从而保证反投影到原始位置后的三角网能正确反映对象表面形状。
球面投影构网算法采用逐点插入法构网,构网流程如图1所示。
该方法是将2维Delau nay三角网的逐点插入构网法扩展到了球面上[10]。
首先定义投影球面,将数据点以中心投影的方式投影到球面;然后构建一个覆盖整个球面的初始球面Delaunay三角网;再将投影到球面上的数据点逐点插入三角网,并用球面局部优化算法(Local Optimization Procedure)保证生成的三角网符合球面Delaunay准则,循环此步骤直到所有的点都被处理;删除初始三角网的顶点,以及包含这些点的三角形,并局部修复三角网;最后保持投影点的球面的构网关系将其反投影到数据点原始位置,完成构网。
本节将首先介绍本算法采用的数据结构和判断几何对象空间位置的方法,然后对算法过程中投影球面的定义、初始三角网的构建和逐点插入构网过程等步骤进行详细的讨论。
图1 球面逐点插入构网流程图F ig.1 Flow char t of the alg or ithm2.1 数据结构球面Delaunay三角网(SD T IN)由相互邻接的三角形组成,每个三角形的三个顶点都在球面上,为了方便的存储对象的数据以及对象之间的关系,并能快速的增加、删除、修改和查找三角网中的对象,本文采用了如图2的数据结构描述顶点、三角形和SD T IN及其拓扑关系。
其中,顶点数据结构同时记录扫描点的原始坐标与投影后的坐标,在将数据点从球面反投影到原始位置时,不需要重新计算坐标,避免了两次投影计算对点云精度的影响;三角形的数据结构按逆时针顺序记录了每个顶点的指针,该记录顺序是后文讨论球面点与三角形位置关系的基础,49February 2009Vol.38No.1AGCS http://xb.si 也保证了三角网中三角形法向的一致;同时,三角形的数据结构中还按逆时针顺序记录了相邻三角形的指针,这种记录方式为高效搜索球面上点所在的三角形以及快速进行球面LOP 局部优化提供了支持。