基于DSP技术的数字式SNOM_STM控制系统的研发和应用
基于DSP宝石加工机械手控制系统设计与实现
m n,Wuhu G agi 4 2, hn ) et zo u n x 5 0 C i 1 0 a
中 图 分 类 号 :P 4 T22 文献标 识码 : A
De i n a d Re lz to f G e so o e sng M a i a o n r lSy t m s d o sg n a ia i n o m t ne Pr c si n pult r Co t o se Ba e n DSP XI ONG ,YU he m i ,CHEN n —h n Yi Z n- ng Bi g z o g
州 5 10 ) 4 0 2
摘 要 : 了在 工业 生产 中提 高 宝石加 工 的精度 和 效 率 , 用一 种 基 于 D P控 制 五 自由度机 械 手 实现 为 采 S 宝石加 工 的方 案 。 系统 以 D P为核 心处理 器 , 以专 用步进 电机 驱动 芯 片 , S 辅 配合 传 感 器 , 晶 显示 和 液
A b t ac s r t:I r e o i pr v he e ce c nd pr cso f g m so oc s ig i h d tilpr n o d rt m o e t f in y a e iin o e t ne pr e sn n t e i usra o‘ i n d c in,u ig a 5- O F m a pu ao s d o S o to o pr c s e s o e yse i S st e u to s D n ni lt rba e n D P c n r lt o e s g m t n .S tm w t D P a h h c r oc s o ,s ppo t d b d c t d s e n gm o o rve hpS w ih t e s n o e h o o y, o e pr e s r u re y de ia e tppi t rd i rc i , t h e s rt c n l g LCD i。 ds ply a e o e c n r lt c noog ,i c n ipu t e pa a ee s f g ms o e d sg ih lng r n e t a nd r m t o to e h l y t a n t h r m tr o e t n e in w t o a g o c n r lt e m a pu ao o m e t bo t rn i g a l h g g m s o e o to h ni lt r m ve n a u gi d n nd poi i e t n .Te t s o s h t h s tห้องสมุดไป่ตู้ sn s h w t a t e yse r al r d c heer r n l ge ty e u et ro sofm a ua o e s gpr cs e s o e a d i pr c s i e ie g m t n n mpr v h o e sngfe iii a i n o et e pr c s i xb l y r to l t a d e ce c n f in y. i K e o ds:5 D OF m a i lt r s e yw r 一 n pu ao ; t ppi o o ;pr c s e so ; e o e c n r l ng m t r o e sg m t ne r m t o to
基于DSP的数字化电机控制系统开发与实验平台设计
北京:清华大学出版社,2002 3居兴华等.宝钢2050热轧板带厚度控制系统的研究.
钢铁,2000(1)
Design of Monitor Software about Hydraulic AGC System Based on VB
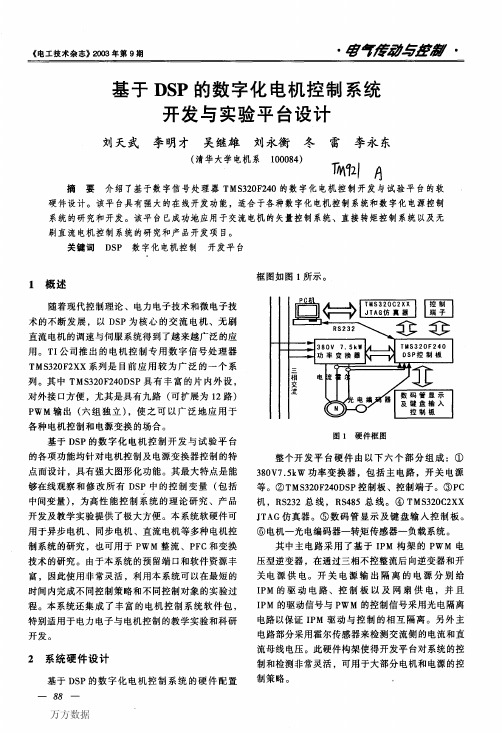
电路部分采用霍尔传感器来检测交流侧的电流和直
流母线电压。此硬件构架使得开发平台对系统的控
制和检测非常灵活,可用于大部分电机和电源的控
制策略。
.
基于DSP的数字化电机控制系统开发与实验平台设计
主控电路部分还配置了丰富的资源用于系统开 发,图2为DSP控制板的逻辑框图。
『串行EEPROM№
=剥 开关量输出
基于DSP的数字化电机控制开发与试验平台 的各项功能均针对电机控制及电源变换器控制的特 点而设计,具有强大图形化功能。其最大特点是能 够在线观察和修改所有DSP中的控制变量(包括 中间变量),为高性能控制系统的理论研究、产品 开发及教学实验提供了极大方便。本系统软硬件可 用于异步电机、同步电机、直流电机等多种电机控 制系统的研究,也可用于PWM整流、PFC和变换 技术的研究。由于本系统的预留端口和软件资源丰 富,因此使用非常灵活,利用本系统可以在最短的 时间内完成不同控制策略和不同控制对象的实验过 程。本系统还集成了丰富的电机控制系统软件包, 特别适用于电力电子与电机控制的教学实验和科研 开发。
Yang Jingming (Yanshan University)
Abstract This paper introduces the communication protocol of upper and low machine and the visual interfaces based on VB6.0 about hydraulic automatic gauge control system of 1270mm cold rolling mill. Keywords AGC system Visual Basic 6.0 communication
基于DSP的数字伺服系统研制及控制算法的研究的开题报告

基于DSP的数字伺服系统研制及控制算法的研究的开题报告一、研究背景随着现代工业技术的不断发展,数字信号处理器(DSP)作为一种新兴的数字信号处理技术,已经广泛应用于数字伺服系统中。
数字伺服系统是利用数字控制器控制电机及其他动力机构的运动,取代传统的模拟伺服调节系统。
数字伺服系统的优点在于其精度高、可靠性稳定、可以有效地实现高速运动控制,并且更加适合于复杂的运动控制应用。
然而,由于伺服系统需要在瞬间传递大量数据和进行复杂的控制运算,对DSP的性能也提出了更高的要求。
因此,需要对数字伺服系统的研制及控制算法进行深入研究,以提高数字伺服系统的运行效率和控制精度。
二、研究内容本次研究的内容主要包括以下两个方面:1.基于DSP的数字伺服系统的研制首先,需要对数字伺服系统的硬件进行设计,并选取合适的DSP芯片作为控制器。
其次,需要对数字伺服系统的软件进行编程,以实现数字伺服系统的控制功能。
同时,为了保证数字伺服系统的可靠性,还需要对数字伺服系统的电路进行仿真测试和实际应用测试。
2.数字伺服系统的控制算法的研究伺服系统的控制算法是数字伺服系统的核心部分,对于数字伺服系统的精度、响应速度等性能有着至关重要的影响。
因此,需要对数字伺服系统的控制算法进行研究,如采用基于模型的PID控制算法、神经网络控制算法、自适应控制算法等方法,以提高数字伺服系统的控制精度和性能。
三、研究意义数字伺服系统是现代工业控制领域中的重要技术,其在机械制造、自动化生产、航空航天等行业中有着广泛的应用。
本次研究的意义在于通过研究基于DSP的数字伺服系统的研制及控制算法的研究,提高数字伺服系统的运行效率和控制精度,为数字伺服系统在实际应用中提供更好的解决方案。
四、研究方法本次研究的方法主要包括以下几个方面:1.文献综述:对数字伺服系统的研究现状进行综述,了解数字伺服系统的发展历程、现状及存在的问题。
2.硬件设计:根据数字伺服系统的实际应用需求,设计数字伺服系统的硬件电路,并选取适合的DSP芯片作为控制器。
基于DSP实验箱显示/控制模块的应用系统设计
基于DSP实验箱显示/控制模块的应用系统设计在当今的数字化时代背景下,DSP已成为通信、计算机、消费类电子产品等领域的基础器件,被誉为信息社会革命的旗手。
宁波大学也十分重视DSP芯片技术的教学与研究,但开设DSP芯片技术课程的时间很短,仅两三年的时间,2004年底才引进了ICETEK-VC5416-USB/PP-EDU型DSP教学实验系统。
而我们现有的实验内容仅仅是一些验证性的实验,每个实验项目都是局限于对实验箱中某一单一功能进行的,缺乏针对性,更不适合宁波大学特色办学--短学期的教学,这些问题对正常教学工作的开展造成了很大不利,不能锻炼学生的系统设计能力。
因此,迫切要求开发出适合于短学期教学的实验项目。
目前音乐播放系统(mp3)正由单一的播放功能逐步向集录音、收音、视屏播放等功能于一体的方向发展,对处理芯片的要求日益提高。
DSP芯片体积小、功耗低、处理速度快,非常适合新的音乐播放系统的应用。
本课题组成员针对我校开设的专业课《DSP芯片技术应用》及《DSP芯片应用系统设计》两门课程的特点及TMS320C54X系列DSP芯片的应用场合,努力探索了一套适合于培养学生软硬件系统设计能力的实验方案,从而提高学生解决实际应用问题的能力,并设计开发了基于DSP教学实验箱的音乐播放应用系统,本文主要介绍了该系统的设计过程和测试结果。
2 系统设计2.1 系统设计思路一款普通的播放器主要有以下几个部分:数据端口、内存、微处理器、数字信号处理器、显示屏、播放控制、音频端口、放大器、电源等。
DSP的实验箱的显示/控制模块主要由以下几部分组成:液晶显示、键盘输人、音频输出、电机转动等。
可以将液晶显示部分来代替LCD显示控制器,而键盘可以充当音乐播放器的按键,音频输出则相当于音乐的产生,而电机转动则是模仿一个安全的音乐播放系统,他设置了门禁限制,只有输入正确密码才能进入,进入系统或退出系统时,电机逆向转动或正向转动。
系统框图如图1所示。
DSP在数字控制系统设计中的应用
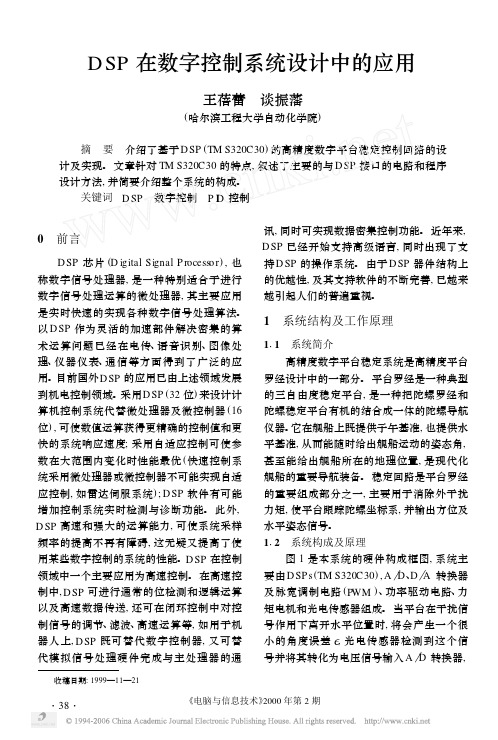
收稿日期:1999—11—21D SP 在数字控制系统设计中的应用王蓓蕾 谈振藩(哈尔滨工程大学自动化学院)摘 要 介绍了基于D SP (TM S 320C 30)的高精度数字平台稳定控制回路的设计及实现。
文章针对TM S 320C 30的特点,叙述了主要的与D SP 接口的电路和程序设计方法,并简要介绍整个系统的构成。
关键词 D SP 数字控制 P I D 控制0 前言D SP 芯片(D igital Signal P rocess o r ),也称数字信号处理器,是一种特别适合于进行数字信号处理运算的微处理器,其主要应用是实时快速的实现各种数字信号处理算法。
以D SP 作为灵活的加速部件解决密集的算术运算问题已经在电传、语音识别、图像处理、仪器仪表、通信等方面得到了广泛的应用。
目前国外D SP 的应用已由上述领域发展到机电控制领域。
采用D SP (32位)来设计计算机控制系统代替微处理器及微控制器(16位),可使数值运算获得更精确的控制值和更快的系统响应速度;采用自适应控制可使参数在大范围内变化时性能最优(快速控制系统采用微处理器或微控制器不可能实现自适应控制,如雷达伺服系统);D SP 软件有可能增加控制系统实时检测与诊断功能。
此外,D SP 高速和强大的运算能力,可使系统采样频率的提高不再有障碍,这无疑又提高了使用某些数字控制的系统的性能。
D SP 在控制领域中一个主要应用为高速控制。
在高速控制中,D SP 可进行通常的位检测和逻辑运算以及高速数据传送,还可在闭环控制中对控制信号的调节、滤波、高速运算等,如用于机器人上,D SP 既可替代数字控制器,又可替代模拟信号处理硬件完成与主处理器的通讯,同时可实现数据密集控制功能。
近年来,D SP 已经开始支持高级语言,同时出现了支持D SP 的操作系统。
由于D SP 器件结构上的优越性,及其支持软件的不断完善,已越来越引起人们的普遍重视。
1 系统结构及工作原理111 系统简介高精度数字平台稳定系统是高精度平台罗经设计中的一部分。
基于DSP的PMSM无位置传感器控制系统实现
基于DSP的PMSM无位置传感器控制系统实现杨 阳 邱娜灵(四川建筑职业技术学院,四川 德阳 618000)摘 要:笔者介绍了基于美国TI公司的DSP芯片TMS320F2812为核心的永磁同步电机(PMSM)无位置传感器系统的电路设计。
系统主要由三部分组成:由逆变器、驱动器、光耦隔离组成的功率驱动电路,检测电流、电压的检测电路和DSP及其外围的控制电路。
电机部分采用矢空间量控制算法进行建模和计算,为DSP的控制算法提供理论依据。
此外,利用相关软件设计并搭建了控制电路,并将该设计转化为实物电路,实验验证电路运行稳定可靠。
关键词:PMSM;DSP;无位置传感器;电路设计中图分类号:TM341 文献标识码:A 文章编号:1003-9767(2017)11-121-04Realization of PMSM Position Sensorless Control System based on DSPYang Yang, Qiu Naling(Sichuan College of Architectural Technology, Deyang Sichuan 618000, China) Abstract: The author introduces the design of the permanent magnet synchronous motor(PMSM) position sensorless vector control system based on the DSP chip, TMS320F2812 of the American TI company. The system consists of three parts of power drive circuit, detection circuit and DSP control circuit. In the motor part, vector space control algorithm is used to model and calculate, which provides a theoretical basis for the control algorithm of DSP. In addition, the control circuit is built by using the related software design, and the design is transformed into the physical circuit, which is stable and reliable through the experimental circuit.Key words: PMSM; DSP; position sensorless; circuit design1 引言无刷直流电机用位置传感器来代替碳刷换向器,使得它既有直流电机的优点,又弥补了碳刷滑环的缺点,具有高效率、高精度、体积小、运行可靠等优点,是当今效率最高的调速电动机[1]。
基于DSP的数字化舵机系统软件设计与实现
基于DSP的数字化舵机系统软件设计与实现摘要本文主要介绍了一种基于数字信号处理器(DSP)的数字舵机控制器的软件程序设计方案。
所选用的DSP为德州仪器公司的TMS320F2812,该DSP在电机控制应用上进行许多优化设计。
相对于传统的采用单片机或其它微处理器的控制器,采用DSP可以使程序实际更简单,同时可以实现更复杂的算法。
本文主要讨论了DSP与有刷直流电机的之间的PID控制算法及软件实现,对数字舵机控制器的设计有较大的工程价值。
关键词:舵机控制器,DSP,有刷直流电机,PID控制Software Design of Digital Servo Controller Based on DSPAbstractThis paper presents a software design of Digital Servo Controller system. The DSP used in the design is TMS320F2812 produced by Texas Instrument (TI TM) which has been greatly optimized for motor-control application. Compared with the traditional controller based on microcontroller or other microprocessor, using DSP can simplify the software design of the controller system, and realize more complex algorithm.This paper mainly discussed the algorithm of PID and its realizition between DSP and brushed DC motor, and supplies the reference for the design of Digital Servo Control system.Key Words: Digital Servo Controller, DSP, BDC, PID目录1 引言 (1)1.1 概述 (1)1.2 课题研究背景 (1)1.3 国内外相关技术的发展状况 (1)2 舵机系统介绍 (5)2.1 事件管理器 (5)2.2 电机简介 (7)2.2.1 电机的分类 (8)2.2.2 有刷直流电机工作原理 (9)2.2.3 电刷和换向器 (9)2.2.4 基本驱动电路 (10)2.2.5 速度控制 (12)2.2.6 反馈机制 (12)2.2.7 传感器反馈 (13)3 部分硬件电路 (15)3.1 光电编码器输入电路 (15)3.2 功率放大电路 (15)4 数字舵机系统软件程序设计 (18)4.1 系统流程图 (18)4.2 QEP编码模块 (20)4.3 速度计算模块 (24)4.4 BDC PWM产生模块 (28)4.5 PID控制器模块 (31)4.6 系统测试说明 (34)5 附录 (41)附录1:数字化舵机控制器软件设计主程序 (41)6 总结 (48)致谢 (51)1引言1.1概述舵机是一种位置伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。
基于DSP的数字综合保护控制装置的研制
基于DSP的数字综合保护控制装置的研制提出了一种基于32位高性能DSP芯片TMS320F2808的数字综合保护控制装置的软硬件设计方案。
可以实现110kv电压等级以下的线路、变压器、电容器、电动机等回路和设备的多种保护功能。
标签:DSP;数字综合保护控制装置中图分类号:F49文献标识码:A文章编号:1672-3198(2012)19-0170-01 0引言与传统的继电保护装置相比,微机保护装置由于其在性能和可维护性方面的优势得到了越来越广泛的应用。
然而,由于应用到现场的微机保护装置种类繁多,功能各异,使装置的软硬件结构日趋复杂,不可避免的带来一些诸如装置可靠性,实用性,制造成本等方面的问题,给用户的维护和掌握增加了诸多不便。
因此,尽可能的减少非标准化的补丁设计,减少后续开发维护的工作量,研制一种结构尽可能简单可靠,功能满足大部分用户要求的突出其实用性的保护装置成为大势所趋。
本文采用TI公司32位高性能的DSP芯片——TMS320F2808,设计了可以满足电力系统各种保护装置的最常用的功能的数字综合保护控制装置。
在硬件设计上尽量简练可靠,更多的工作交由软件实现,采用了保护元件可编程的方法,使装置能够适用于110kv电压等级以下的线路、变压器、电容器、电动机等回路和设备的保护;装置结构采用模块化设计;在DSP上嵌入了一个实时操作系统平台;程序语言主要采用C语言,少量代码用汇编语言来实现。
完成了人机接口设计,通过按键对装置进行操作,指示灯能指示出装置各种运行状态,液晶显示器LCD通过“图元”文件的方式绘制要显示的内容,可以显示一次系统图等。
1保护元件可编程机制本装置采用面向对象的设计思想,实现系统可编程和多层次编程模式(元件级-工程级-用户级),采用“主保护元件”和“子保护元件”组合机制,提供32×6种保护元件类型供选择,用户可以根据实际需要,通过键盘设定保护类型,为装置的功能扩展奠定了良好的基础,使装置可以满足不同类型的设备、回路的要求和变化。
基于DSP芯片的数字控制系统综述
数字控制系统设计基本过程 。工程上有较好 的参考和应用价值。
关键 词 :D  ̄ S 芯片;数 字控 制 ;闭环控 制
引 言
传统 的信 号处 理或 控 制系 统采 用模 拟 技术进 行 设
二、D P为基础 的数 字控 制系统 S
当控制 算法 比较 复 杂 , 则难 以采 用模 拟 电路 实现 , 为 此采用 微处 理器 或 D P的数字 控制 方式 是 目前 设计 S 控 制系 统 的发展 趋 势 , D P为 基础 的数 字控 制 系统 , 以 S
百分 之 百准确 ,而且 截 断和 溢 出等 问题也 可 以 采用 适
当的 调整 比例 范 围来解 决 。
( 下转 6 1页)
P a t e系统 实 践 r ci c
6 1
sa -at r是 前后 两 次 扫 描 中搜 索 窗 口 的 比例 系 c fc o I e
数 , . 表示 每 次将 搜 索窗 口扩 大 1% m n n jh o s 11 0 ; j— e g b r 指构 成检 测 目标 的相 邻 矩形 的最 小 个数 , 它控 制着 误 检 率 ; g 是 操 作 模 式 , 如 f s l a
M c i e I t 1 g n e2 0 , 4 5: 9 — 0. a h n n e i e c , 22 ( 6 6 7 6 1 0 )
C H AR FI V A ND BI GE T G S
_ — — —
会在 嵌入 式环境 中得到 广泛 应用 。
参 考 文 献
[ LH,MA M KJ.F c e e to nc 1 r 1 R - A a ed t c ni o o ] i i m e 【 .I E r n a e n A a y i n ag s J ] E E T a sP t t r n l s a d S
基于现代DSP技术的全数字MQAM调制器的设计
a e p cfe , i cu ig c a lr s ra t p rle, d fee ta e c d n , ma p n , a d h p n fl r ec T e , te r s e iid n l dn s rmb e, e il o a all i rn il n o i g p i g n s a ig it , t. h n h e
【 bt c】 A crig t t lm t pi i e o te M A ou t n h olo yt eea ri IE D s A s at co n o h ut ae r c l f h Q M m dl i ,te t fSs m G nrt n S S i r d e i n p ao o e o
td dlt n MQ M) u eMo u i , A 采用 正交 幅度 调制 的方法 对载 ao 由于 M A Q M调 制方式 的原理在 很 多文献 中有 所介
波 的幅度及相位 同时进行 调制 , 与其他调制技术相 比, 是
一
绍 , 里就不再说明 。以6 Q M为例 , 这 4A 采用数字化处理
d vc . e i e
【 e od】M A ; ou tn F G ; y e ee t K yw rs Q M m dli ; P A Ss m G nr o ao t ar
0 引言 1 基于 Ss m G nrt 的6 Q M yt eea r 4 A e o 多电 平正交幅 制( i,Qaa 。 ml 度调 Ml。l u r A p. t、 dt l。 i 调 制器设计
基于 DSP 芯片的数字控制系统综述
1 典 型 控 制 系统 的组 成
比较典型 的闭环控制 系统主要有 控制器 、
传 感 器 、 被控 对 象 这 些 基 本 模 块 构 成 。制 器 会
模 型,然 后针对 现 当代 社会 广泛 采用 的基 于
DS P为 基础 的 数 字 控 制 系 统 进 行 了 分 析 , 并 将
它 同传 统的模拟信号处理 系统进 行 比较 。DS ห้องสมุดไป่ตู้
利 用 的数 字 信 号 处 理 技 术 由 于具 有 抗 干 扰 能 力
强 、可靠性强 、灵活 、方便 等特 点,采用软件
事 项 相 应 的功 能 ,较 传 统 的模 拟 电 路 体 现 了明 显 的优 势 。相 信 ,在 控 制 系 统 的 发 展 中 , 基 于
些较复杂的控制系统 。 比如机 器人 自动控制、
C NC。在 国 防 工业 的相 关产 品 中 , 比 如 导 航 与 导 弹 ,可 靠 性 要 求 都 需 非 常 高 。 为 此 , 我 们 采
D S P 为基础 的数 字控 制 系统的优势
做 了 简单 的 概 括 。
DS P系 统 中包 含 的 C P L D 、DS P芯片 和
实现的数值计算不会随着各种外在条件对硬件
电 路 的 影 响 而 相 应变 化 , 计 算 都 是 肯 定 正确 的 , 而 且 还 可 以针 对 存 在 的 截 断 等 相 关 问题 采 取 调
现代控 制系统 主要是 以数 字技术为基础 ,
因 此 针 对 DS P系 统 , 接 口都 是 兼 容 的 , 因 此 很方便 。
置 都 是 利 用 电容 、 电 阻和 集 成 运 算 放 大 器 来 构 造 。然 而 ,随 着 社 会 高速 信 息 化 的 快 速 发 展 , 我 国 逐 步 进 入 数 字 化 的 时 代 , 数 字 信 号 处 理 技 术 逐 渐 发 展 成 熟 并 得 到 了 广 泛 的 利 用 。 数
基于DSP的大功率SRM全数字控制系统
( RM ) wa r s n e n t i a e . Du lp o e s r r h t c u e wa d p e n t i s s e b s d o ih S s p e e t d i h s p p r a r c s o s a c i t r s a o t d i h s y t m a e n h g e p ro ma c i i lsg a r c s o DS e f r n ed g t in lp o e s r( P)TM S 2 F2 1 n ir o t o lru i M C a 3 0 8 2 a d m c o d n r l n t( e U) 8 C5 .Co p e 9 2 m lx p o r mma l o i e ie( rga b e l g cd v c CPL D)E PM 7 6 S i t a fs mea a t e ie s u e r e O smp iy t e 0 4 n s e d o o p r vc swa s d i o d rt i l h d n f e t r rc r u ta d i r v h e ib l y o h y t m.An u r n h p c n r l( x e i ic i n mp o e t e r l i t ft es s e o a i d c r e t c o o t o CCC)wa p l d a h sa p i st e e
一种基于DSP的STATCOM控制系统及其控制方法[发明专利]
![一种基于DSP的STATCOM控制系统及其控制方法[发明专利]](https://img.taocdn.com/s3/m/baaa88ea0740be1e640e9a91.png)
专利名称:一种基于DSP的STATCOM控制系统及其控制方法专利类型:发明专利
发明人:马幼捷,王德祥,周雪松,刘伟
申请号:CN201410635252.1
申请日:20141112
公开号:CN104348175A
公开日:
20150211
专利内容由知识产权出版社提供
摘要:一种基于DSP的STATCOM控制系统,其特征在于它包括信号调理电路单元、DSP控制单元、工业控制计算机单元以及驱动电路单元;其中,所述DSP控制单元由补偿电流检测模块和控制及脉冲触发模块构成;其控制方法包括:采集电网实时电压电流信息,通过瞬时无功功率理论算法完成谐波检测和无功计算,并将结果传送给所述的DSP控制模块,控制所述补偿模块的投入与切除;其优越性在于:装置简单;响应速度快;动作精确可靠;数据计算和数据处理能力强。
申请人:天津理工大学
地址:300384 天津市西青区宾水西道391号
国籍:CN
代理机构:天津天麓律师事务所
代理人:王里歌
更多信息请下载全文后查看。
DSP技术及应用 成电陈金鹰 教授的讲义
可编程
DSP系统开发 周期大大缩短
13
6.保密性好
DSP系统 保密 性能 几乎 无懈 可击
隐蔽内部总线地址变化 做成ASIC
DSP CPLD FPGA
保密 保密 性好 性好
14
7.时分复用
信道n 信道2 信道1
系统1
系统2
系统n
DSP系统
应 用 场 合
信号的采样 频率与DSP 系统的运算 速度相比较 低的场合。
26
逻辑控制
器件的选型原则
根据与其他 系统通信的速 率决定采用的 通信方式: 串口 并口 总线
27
通信接口
器件的选型原则
根据使用场合、数据 传输速率的高低(总线 宽度、频率高低、同步 方式等)选择: PCI ISA 现场总线
28
总线选择
器件的选型原则
人机接口 可以通过单片机构成 通信,也可在DSP的基 础上直接构成。 键盘 显示器等 主要考虑电压的高低 和电压的大小。 电压高低要匹配 电流容量要足够
DSP系统概述
DSP系统 数字信号
实时处理
模拟器件
强调控制 FPGA/CPLD
运算过程 DSP芯片
9
1. 精度高
一、DSP系统的特点
模拟网络元件 (R、L、C等) 模拟网络系统 DSP、D/A
难
精度10-3
17位字长
精度10-3
10
数字系统
2.可靠性强
放大器A
信号
放大器B 计算机A
A、B结果 可能不同
A、B结果 果相同
信号
计算机B
只要误差不超过0、1判决电平
11
3.集成度高
DSP系统
DSP CPLD FPGA
基于DSP的数据采集系统的开发与实现
基于DSP的数据采集系统的开发与实现
陆幼青;潘宏侠
【期刊名称】《机械工程与自动化》
【年(卷),期】2007(000)001
【摘要】为了解决自动检测和控制系统中数据采集速度慢的问题,提出运用基于DSP的软件平台CCS和TI公司TMS320系列F2812芯片开发一种快速数据采集系统,研究了该系统硬件平台的搭建和相关应用程序的开发.将其运用于旋转机械状
态监测及故障诊断领域中有关转速信号、多路同步轴径向振动信号、轴向位移信号、若干开关量信号、温度、压力、流量等参数的信号采集,取得了良好的效果.
【总页数】3页(P68-69,72)
【作者】陆幼青;潘宏侠
【作者单位】中北大学,机械工程与自动化学院,过程控制系,山西,太原,030051;中北大学,机械工程与自动化学院,过程控制系,山西,太原,030051
【正文语种】中文
【中图分类】TP274+.2
【相关文献】
1.基于DSP的数据采集系统开发与实现 [J], 王淑芳;张国英;马景兰;高艳铃;张福斌;李致荣
2.基于dsPIC的存储式数据采集系统设计与实现 [J], 周志彬;高巍;王晓东;涂文荣
3.基于dsPIC的存储式数据采集系统设计与实现 [J], 周志彬;高巍;王晓东;涂文荣;
4.基于DSP的数据采集系统开发与实现 [J], 井超;张晓华
5.基于FPGA+DSP的数据采集系统设计与实现 [J], 程佩;房海华;黄蓝
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的无人机手遥控制器PCM解码装置设计与实现
·1 0 6·
内容版权归作者所有
更多技术文章,论文请登录
基于 D S P 的无人机手遥控制器 P C M 解码装置设计与实现 宋辉 等:
可能。P 而且 CM 编码的优点不仅在于其很强的抗干扰性, 可以很方便的利用计算机编程, 不增加或少增加成本, 实 现各种智能设计。
目前, 比例遥控设备中最常用的两种脉冲编码方式就 是P P M 和P C M: P P M 接收解码电路都使用积分电路或通 用的集成电路来实现, 只要输入脉冲的上升沿达到一定的 高度, 都可以使其翻转。 这样, 一旦输入脉冲中含有干扰 脉冲, 就会造成输出混乱。 由于干扰脉冲的数量和位置是 随机的, 因此在接收机输出端产生的效果就是 “ 抖舵 ” 。对 于窄小的干扰脉冲, 一般的 P P M 电路可以采用滤波的方 式消除, 而对于较宽的干扰脉冲, 滤波电路就无能为力了。 尤其是在有同频干扰的情况下, 无人机往往会完全失控。 / 数( / 和数字编解码技术实 P CM 编解码则是用模 A D) ] 1 3 现的[ 。在编码电路中模 / 数转换部分将电位器产生的模 拟信息转换成一组数字脉冲信号。 接收机解码电路中的 解码模块收到这种数字编码信号后, 再经过解码操作, 将 数字信号解码出所需要的控制信号。 由于在空中传播的 是数字信号, 很容易在解码器中进行校验, 从而判断数据 是否有效。如果在传送过程中产生了干扰, 解码模块可以 不更新该通道的数据保持原状态, 当下一次有效数据到达 时再更新输出数据, 这样就消除了各种干扰造成误动作的
[] 作是 U A R T5 。S C I的接收器和发送器各具有一个 1 6级
2 . 2 脉冲信号比较电路设计 经过多次实验发现, 传输遥控器输出的脉冲控制信号 的电平并不稳定, 随着遥控器电源电压等因素的变化会发 生跳变。由于 D S P 芯片的信号输入电压是必须保证在一 定范围之内, 因此需要对输入的脉冲进行电平转换、 保持 处理, 将高低电平稳定在一个固定的值, 这样才能使遥控 器输出的控制信号能够被 D S P 准确捕获并尽量削弱对信 号的干扰和衰变。 系统采用 L M 2 9 0 3 电压比较器进行脉 冲波形的整形。
基于DSP精跟踪数字伺服系统研究的开题报告
基于DSP精跟踪数字伺服系统研究的开题报告一、研究背景与意义数字伺服系统指将传感器得到的信号经过AD转换后进行数字处理,通过数字运算实现对控制对象的调节,具有精度高、性能稳定、自适应性强等特点。
精跟踪数字伺服系统是数字伺服系统的一种进一步发展研究,它采用高速数字信号处理器(DSP)进行实时计算,并通过谐波补偿、反馈滤波等技术来实现高精度的控制。
在工业自动化、机床加工、精密测量等工程领域,数字伺服技术已成为了必备的控制手段之一,而精跟踪数字伺服技术则更是对控制精度与稳定性提出了更高的要求。
因此,开发一套专门应用于精跟踪数字伺服系统的控制方案和算法,具有重要的研究和应用价值。
二、研究内容本研究将围绕精跟踪数字伺服系统展开,主要研究内容包括:1. 分析数字伺服系统的基本结构原理,分析数字信号处理器在伺服系统中的作用和必要性。
2. 探究精跟踪数字伺服系统的现状及发展趋势,对精跟踪数字伺服系统的目标,特点和主要技术进行深入分析。
3. 针对精跟踪数字伺服系统的特点,对DSP的算法优化、控制策略优化等进行研究和实验验证,并实现有关的控制算法。
4. 对研发的精跟踪数字伺服系统进行实验验证和控制性能评估,并与传统数字伺服系统进行对比分析。
三、研究计划和预期目标1. 论文框架:绪论、数字伺服系统的基本原理、精跟踪数字伺服控制系统的设计、实验分析、控制性能分析、结论与展望等。
2. 计划时间节点:第1-2个月:文献查阅及理论学习;第3-4个月:方案设计及算法实现;第5-6个月:系统实现及实验验证;第7-8个月:数据处理及结果分析;第9-10个月:论文撰写及答辩准备。
3. 预期目标:研发一套精度高、稳定性好的精跟踪数字伺服系统,实现对控制对象的高精度调节,同时对DSP的优化、控制策略等方面提出新的思考和见解,为数字伺服系统的应用和发展做出一定的贡献。
基于 DSP 的 PM SM 伺服控制系统设计
技 术设 备 内部 的记 忆 来记 住位 置 ,因 此 当停 电后 ,
编 码 器 不 能 有 任 何 的 移 动 ;当 正 常 工 作 时 ,编 码 器 不 能 有 干 扰 而 丢 失 脉 冲 。 这 样 ,在 实 际 的 工 程 项 目中 会 带 来 很 多 的 不 便 。 此 处 ,采 用 多 摩 川 公 司生产的型号为 T S 5 6 6 8 N2 1的 1 7位 绝 对 编 码 器 来 实 现位 置/ 速 度 检 测 , 并 自行 设 计 了 将 绝 对 编 码 器
中 图 分 类 号 :T M3 5 1
文 献标 识 码 : A
D O I :1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2 —0 7 9 2 . 2 0 1 5 . 0 3 . 0 1 1
0 引 言
随 着 集 成 电 路 、 电 力 电 子 技 术 和 交 流 可 变 速 驱 动 技 术 的 发 展 ,交 流伺 服驱 动 有 了 较 快 的 发 展 。
子 位 置 和 速 度 计 算 、电 流 及 速 度 P I调 节 、 坐 标 变
换 、S VP W M 的 生 成 ,流 程 如 图 4所 示 。
控 制 中 霍 尔 传 感 器 可 以 检 测 到 电 机 输 出 的 相 电 流 并 作 比例 变 换 至 幅 边 ,然 后 经 过 高 频 率 波 、运 算 放 大 和 偏 置 电 路 得 到 0~3 . 3 V 的 电压 信 号 ,输 入
统可靠性 。
2 . 4 位置/ 速 度检测 电路
以往 经 常 采 用 增 量 式 编 码 器 进 行 位 置 和 速 度
检 测 ,通 过计 算 编 码 器 旋 转 时 输 出 的 脉 冲 个 数 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国科学技术大学硕士学位论文基于DSP技术的数字式SNOM/STM控制系统的研发和应用姓名:邬晓华申请学位级别:硕士专业:精密仪器与机械指导教师:黄文浩;王克逸19990601基于DSP技术的数字式SNOM/STM控制系统的研发和应用摘要/SPM仪器家族l=要包括STM(扫描隧道显微镜),SNOM(扫描近场光学显微镜)和AFM(原子力显微镜)。
传统的SPM仪器的电子反馈系统均为模拟式的。
7本文介绍了一种与上海原子核研究所合作开发的基于DSP技术的全数字化SPM仪器。
对它的基本原理,仪器结构,和电子系统作r详细描述。
与模拟式的SPM仪器相比,全数字化的SPM仪器在仪器易维护性,操作的自动化程度,特殊的反馈控制功能的实现,配置灵活性以及开放性等方面有着明显的优势。
针对这套仪器,我们自行开发了一套控制系统软件,它的基本功能包括SPM探针的进给和扫描控制,图、、象数据采集,图象实时显示和存储以及正弦波发生器等。
、,、1由于SPM仪器的实时性要求很高,并目.DSP插卡上的内存地址是事先固定的。
因此必须采用中断技术来实现高速数据采集,此外还必须解决物理内存访问的问题。
本论文成功的解决了windows98平台下的内存物理地址直接读写,I/O口读写和中断服务程序编写的难题。
同时运用多线程技术实现了扫描参数的实时改变和扫描图象的实利显示。
PSTM是近场光学显微镜的一种,我们还利用它观察到了倏逝波的驻。
,波条纹和它的偏振效应j本文给出了我们所测到的图象,并且建立了一}个物理模型来解释这种现象,讨论了它的产生机制,分析了驻波的光强分布,得出了一些有意义的结论。
我们的实验表明,实验结果与理沦计算吻合的很好。
关键i,司DSP,扫描隧道显微镜,拗别够乳琵场光学显微镜,Windows、AbstractSPMfamilymainlyincludesSTM(ScanningTunnelingMicroscope),SNOM(ScanningNear—FieldOpticalMicroscope)andAFM(AtomicForceMicroscope)etc.TheelectricalfeedbacksystemsoftraditionalSPMinstrumentsareallanalogy.Thisthesisintroducesadigitalinstrument.Itisbased—onDSPtechnologyandjointlydevelopedbySPMlabandShanghaiAtomicNuclearInstitute.Wedescribeitsbasicprinciple,architectureandelectricalsystemindetail.Compared、ⅣithanalogySPMinstrument.thedigitalSPMhasobviousadvantagesontheaspectsofeasy-maintainability,operationautomation,functionimplementation,flexibilityofconfigurationandopenness.Wedevelopasetofsystem—controlsoftwareforthedigitalSPMinstrument.ItsbasicfunctionsincludetheapproachofSPMtip,scanningcontrol,imagedataacquisition,imagereal—timedisplayandsavingaswellasthegeneratorofsinewaveetc.Becauseofthereal—timehi吐requestofSPMinstrumentandthefixedphysicalmemoryaddressofDSP,wemustllseinterrupttechnologytoimplementhigh-speeddataacquisition.MoreoverwealsoneedsolvetheproblemofphysicalmemorydirectaccessaswellasthedifficultiesofI/0portreadandwriteandinterruptserviceprogramimplementation.Furthermore,wealsoadoptmulti・-threadtechnologytOachievethereal—・timechangeofscanningparametersandreal—timedisplayofscanningpictures.PSTMisakindofNear-FieldOpticalMicroscope.WedetectedtheandPolarizationeffectofevarlescentbyusingPSTM.Instanding—wavestripethispaper,weshowthepictureswhichweobservedandbuildaphysicalmodeltoexplainthephenomenon.Thenwenotonlydiscussthereasonofitsevanescentwave.generationbutalsoanalyzetheintensitydistributionofFinallyweobtainsomesignificantconclusions.Furthermore,Ourexperimentindicatesthatthetheoreticalcomputingconclusionsconsistwiththeexperimentalresultsverywell.Keywords:DSP,STM,SNOM,Windows中国科技大学顾士论文第一章绪论§1-1扫描探针显微镜的发展史人的眼睛不能直接观察到比0.Olmm更小的物体或物质的结构细节,借助于光学显微镜,人们可以看到象细菌,细胞那样小的物体。
但是由于光波的衍刳效应,使得传统光学显微镜的分辨极限分辨率是o.2um。
为了观察更微小的物体,必须利用波长更短的波作为光源。
根据德布罗意微观粒子波粒二象性的理论,物理学家利用电子在电磁场中的运动与光线在介质中的传播相似的性质,发明了电子透镜,在此基础上于1933年研制成功了第一台电子显微镜(EM)。
由于在电场中高速运动的电子具有远小于可见光的波长,因而肌具有远高于传统光学显微镜的分辨率。
此后的几十年中,又有许多用于表面结构分析的科学仪器先后问世,如透射电子显微镜(I'EM)、扫描电子显微镜(SEM)、场电子显微镜(FEM)、场离子显微镜(FIM)、低能电子衍射(LEED)、俄歇谱仪(AES)、光电子能谱(ESCA)、电子探针等。
这些技术在各自领域的研究中起着重要的作用。
但任何一种技术在应用中都会存在这样或那样的局限性,例如LEED及x利线等衍射方法要求样品具备周期性结构,传统光学显微镜和SEM的分辨率不足以分辨出表面原子,高分辨TEM主要用于薄层样品的体相和界面研究,FEM和FIM只能探测在半径小于lOOnm的针尖上原子结构和二维几何性质,且制样技术复杂,可用来做为样品的研究对象十分有限;还有些表而分析技术,如x射线光电子能谱(XPS)、紫外光电子能谱(UPS)和能量损失潜(ELS)等只能提供空间平均的电子结构信息;有的技术只能获得问接结果,还需要用理论模型来拟合。
此外,上述一些分析技术对测量环境也有特殊要求,例如真空条件等。
【1】i982年,国际商用机器公司的gerdBining博士和HeinrichRohrer博士及其同事们共同研制成功了一种新型的表面分析仪器~扫描隧道显微镜(ScanningTunnelingMicroscope,简称STM)心1。
STM的基本原理是基于量子理论的隧道效应,其基本机制是在计算机的控制下,探针在样品表面极近的距离(nm级)处扫描,在此过程中,计算机完成对样品局域特性一表现为隧道电流的采集。
它的出现,使人类第一次能够实时的观察单个原子在物质表面的排列状态和与表面电子行为有关的物理、化学性质,在表面科学、材料科学、生命科学等领域的研究中自‘着重大的意义和广阔的应用前景,被国际科学界公认为八十年代世界卜大科技成就之一。
为了表彰STM的发明者对科学研究的杰出贡献,1986年GerdBining和HeinrichRohrer被授予诺贝尔物理奖。
与其它表面分析技术相比,STM所具有的独特优点可归纳为以下五点:1:具有原子级的高分辨率,sTM在平行和垂直于样品表面方向的分辨率分别可达到0.1nm和0.O]nm,即可以分辨出单个原子。
2:可实时地获得在实空间中表面的三维图象,可用于具有周期性或不具备周期性的表面结构研究。
这种可实时观测的性能可用于表面扩散等动态过程的研究。
3:可以观察单个原子层的局部表面结构,而不是体相或整个表面的平均性质。
因而可直接观察到表面缺陷、表面重构、表面吸附体的形态和位置,以及由吸附体引起的表面重构等。
4:可在真空、大气、常温等不同环境下工作,甚至可将样品浸在水或其它溶液中,不需要特别的制样技术,并且探测过程对样品无损伤。
这些特点特别适用于研究生物样品和在不同实验条件下对样品表面的评价,例如对于多相催化机理、超导机制、电化学反应过程中电极表面变化的监测等。
5:配合扫描隧道谱(ScanningTunnelingSpectroscopy,简称STS)可以得到有关表面电子结构的信息,例如表面不同层次的态密度、表面电子阱、电荷密度波、表面势垒的变化和能隙结构等。
尽管sTM有着EM、FIM等仪器所不能比拟的诸多优点,但由仪器本身的工作方式造成的局限性也是显而易见的。
这主要表现在以下二个方面:1:在sTM的恒流工作、模式下,有利它对样品表面微粒之间的某些沟槽不能够准确探测,与此相关的分辨率较差。
在恒高模式下,从原理上这种局限性会有所改善。
但只有采用非常尖锐的探针,其针尖半径应远小于粒子之间的距离时,才能避免这种缺陷。
2:sTM所观察的样品必须有一定的导电性,对于半导体,观察的效果就差于导体;对于绝缘体则根本无法观察。
对于非导体,只有表面镀上导电层后才能观察到它的形貌。
由于导电层的粒度和均匀性等问题又限制图象对真实表面的分辨率。
在STM出现以后,又陆续发展了一系列的新型的扫描探针显微镜,例如:原子力显微镜(AFM)、近场光学显微镜(SN0M)、激光力显微镜(LFM)、磁力显微镜(MEM)、弹道电子发射显微镜(BEEM)、扫描离子电导显微镜(SICM)、扫描热显微镜和扫描隧道电位仪(STP)等等。