加工中心换刀程序分析
五轴加工中心的自动换刀故障

加工中心的换刀

加工中心的换刀形式以及刀库种类介绍数控机床的自动换刀装置中,实现刀库与机床主轴之间传递和装卸刀具的装置称为刀具交换装置。
本文讲解了加工中心的换刀形式以及刀库种类相关内容。
自动换刀数控机床多采用刀库式自动换刀装置。
带刀库的自动换刀系统由刀库和刀具交换机构组成,它是多工序数控机床上应用最广泛的换刀方法。
换刀过程较为复杂,首先把加工过程中需要使用的全部刀具分别安装在标准的刀柄上,在机外进行尺寸预调整之后,按一定的方式放入刀库,换刀时先在刀库中进行选刀,并由刀具交换装置从刀库和主轴上取出刀具。
在进行刀具交换之后,将新刀具装入主轴,把旧刀具放回刀库。
存放刀具的刀库具有较大的容量,它既可安装在主轴箱的侧面或上方,也可作为单独部件安装到机床以外。
1、刀库的种类刀库用于存放刀具,它是自动换刀装置中的主要部件之一。
根据刀库存放刀具的数目和取刀方式,刀库可设计成不同类型。
图7.1所示为常见的几种刀库的形式。
(1)直线刀库。
如图7.1(a)所示,刀具在刀库中直线排列、结构简单,存放刀具数量有限(一般8把-12把),较少使用。
(2)圆盘刀库。
如图7.1(b)-(g)所示,存刀量少则6把-8把,多则50把-60把,有多种形式。
图7.1(b)所示刀库,刀具径向布置,占有较大空间,一般置于机床立柱上端。
图7.1(c)所示刀库,刀具轴向布置,常置于主轴侧面,刀库轴心线可垂直放置,也可以水平放置,较多使用。
图7.1(d)所示刀库,刀具为伞状布置,多斜放于立柱上端。
为进一步扩充存刀量,有的机床使用多圈分布刀具的圆盘刀库(图7.1(e)),多层圆盘刀库(图7.1(f))和多排圆盘刀库(图7.1(g))。
多排圆盘刀库每排4把刀,可整排更换。
后三种刀库形式使用较少。
(3)链式刀库。
链式刀库是较常使用的形式(图7.1(h),(i)),常用的有单排链式刀库(图7.1(h))和加长链条的链式刀库(图7.1(i))。
(4)其他刀库。
格子箱式刀库,如图7.1(j)、k,刀库容量较大。
加工中心刀库装刀步骤【技巧】
数控加工中心有一刀库,我们如果需要哪把刀就用这个指令把它调出来。
当然还有另一种情况就是手动换刀,这个比较容易,你可以参看各厂家的说明书,了解下松刀和紧刀按钮就可以了,那么加工中心刀库装刀有哪些步骤呢?一、刀库装刀的步骤及注意事项一般来说,对于一个工件完整的加工工序,可能涉及铣削、钻削、镗削、铰削和攻丝等工序。
所使用的加工刀具可能几把到几十把。
工件数控加工前需要把每一把刀具装刀刀库中并和加工程序设定对应关系,以便由程序调用。
1、装刀步骤首先将使用的刀具安装到刀柄上,并调整刀具长度至所要求的尺寸;然后根据工件的工艺要求和程序设计将刀具和刀具号一一对应,为了避免混要可以贴上标签;将立式加工中心的主轴回Z轴零点,并通过数控系统面板手动输入并执行T01 M06指令;此时手动将1号刀具装入刀库中,这个刀具即为1号刀具;然后在手动输入T02 M06指令,并手动将第二把刀具装入刀库中,这个刀具即为第二把刀。
按照上述操作一次将剩余刀具装入刀库即可。
加工中心哪家好。
2、装刀注意事项在立式加工中心进行刀库装刀时,应特别注意以下几点:一是只有主轴回到机床零点或换刀点,才能将主轴上的刀具装入刀库,或者将刀库中的刀具调整在主轴上。
二是装入刀库的刀具必须与加工程序中的刀具号一一对应,否则会严重损伤机床和加工零件。
三是交换刀具时,主轴上的刀具不能与刀库中的刀具号重号。
二、刀库装刀后的设置刀库完成装刀后需要进行必要的设置才可进行立式加工中心的正式加工。
因每把刀具的长度或到Z坐标零点的距离都不相同,这些距离的差值需要进行刀具的长度补偿值设定才行。
另外铣刀都就有一定的半径,刀具中心轨迹和工件轮廓差一个半径的尺寸。
因此需要将刀具半径进行补偿才可正常进行数控加工。
加工中心哪家好。
刀具长度补偿有两种方法:一种是将其中的一把刀具作为标准刀具,找出其他刀具与标准刀具的差值,作为其它刀具长度补偿值;另一种是将工件坐标系的Z值输为0,调出刀库中的每把刀具,通过Z向设定器确定每把刀具到工件坐标系Z 向零点的距离,直接将每把刀具到工件零点的距离值输到对应的长度补偿值代码中。
友佳加工中心自动换刀系统的电气分析维修

友佳加工中心自动换刀系统的电气分析及维修引言:1.友佳加工中心由于采用机械手刀库换刀装置,结构复杂,动作流程多。
故信号点多2.原有资料不利维修,只有图,文字很少,且图纸和PMC界面为英文3.同型设备多,具有典型性。
一、加工中心简介、加工中心是指一次装夹中,能够实现自动铣削、钻孔、镗孔、铰孔、攻丝等多工序的数控机床。
它区别于一般的数控铣、镗床的主要特点就是具有根据工艺要求自动更换所需刀具的功能,即自动换刀(ATC)功能。
加工中心的ATC系统,通常由刀库和机械手组成。
它是加工中心的象征,又是加工中心性能的关键部分。
同时由于它的结构复杂,信号点多,使用频繁,也就造成了它的故障频繁,维修难度大。
现我结合近三年的认知来谈谈自动换刀系统的电气原理及维修。
二、友佳加工中心自动换刀系统的组成及控制方式友佳加工中心的自动换刀系统由机械手和刀库两大部分组成。
其中包含独立的刀库控制器,刀臂电机,刀库正反转电机,液压控制电机以及刀具夹紧放松电磁阀。
故其控制也为三大部分:刀库选刀控制,刀具交换控制,主轴准停控制。
其中刀库选刀控制由计算机记忆换刀方式,采用了专用的ATC伺服控制器,及富士变频器,故只要检查原位开关和计数开关的信号,故障率较低。
主轴的准停控制也有编码器和专用的准停控制器。
因为它们控制信号少,故均不详细陈述。
三、自动换刀系统(ATC)的动作流程(一)选刀程序执行T指令时,系统通过控制刀库电机的正转或反转,将刀库上所选的刀具转到换刀位置。
(二)倒刀当T代码执行后,倒刀电磁阀YV10由于Y0.4而得电。
刀杯向下翻90度。
信号检测开关SQ7(X1.0)发讯。
倒刀完成。
(三)抓刀执行交换刀具指令M06时,主轴准停,换刀电机M4启动。
机械手抓刀。
当扣刀定位开关SQ5(X0.6)发讯时,换刀电机停止。
主轴刀具夹紧装置Y0.7失电自动松开,松到位开关SQ10(X1.3)发讯。
(四)拨刀当主轴刀具松SQ10(X1.3)发讯后,换刀电机再次启动。
加工中心换刀的三个步骤及流程

加工中心换刀的三个步骤及流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!步骤一:准备换刀1. 确保加工中心处于停止状态,并关闭所有相关的电源和控制系统。
基于PLC的数控加工中心自动换刀系统的研究
盘式刀库自动换刀控制系统的优势主要体现在以下几个方面。首先,自动换刀 控制系统可以显著提高加工效率,避免了手动更换刀具的繁琐过程,节省了大 量时间。其次,自动换刀控制系统可以降低工人的劳动强度,减少错误操作的 可能性,提高生产安全性。最后,自动换刀控制系统有利于实现工厂的自动化 和智能化,提升整体竞争力。
目前,加工中心自动换刀装置的研究主要集中在换刀方式、刀库设计、夹持机 构和控制系统等方面。其中,换刀方式是自动换刀装置的核心技术之一,直接 影响到换刀的效率和精度。按照换刀过程中是否有旋转动作,换刀方式可以分 为旋转式和非旋转式两种。旋转式换刀方式又可以分为刀具旋转和主轴旋转两 种,而非旋转式换刀方式则可以分为直插式和伸缩式两种。
盘式刀库自动换刀控制系统的工作原理基于计算机数值控制(CNC)技术,通 过接收加工中心的指令,控制机械手臂进行刀具的更换。首先,机械手臂在盘 式刀库中选择需要更换的刀具,然后将其抓取并移动到加工区域。接下来,机 械手臂将旧的刀具从主轴中取出,并将新的刀具安装到主轴上。最后,机械手 臂将更换下来的刀具放回盘式刀库的正确位置。
近年来,随着人工智能、机器学习和计算机视觉等技术的不断发展,加工中心 自动换刀装置的研究也在不断深入。这些技术的应用,可以实现更加智能化和 高效的换刀控制,从而提高加工中心的生产效率和加工质量。
在应用前景方面,加工中心自动换刀装置将会在更多领域得到应用。例如,在 航空航天、汽车制造、模具制造和医疗器械等领域,由于对加工精度和效率的 要求较高,因此对自动换刀装置的需求也将会不断增加。此外,在智能制造和 数字化工厂的建设中,加工中心自动换刀装置也将会成为其重要组成部分之一。
加工中心自动换刀装置的发展历程可以追溯到20世纪80年代,当时该技术还处 于研究和实验阶段。随着计算机技术、机械制造技术和液压气动技术的发展, 自动换刀装置的可靠性、稳定性和效率得到了不断提高。进入21世纪以来,随 着数控技术的快速发展和制造业的不断升级,加工中心自动换刀装置的应用范 围和需求量也不断增加。
加工中心的刀库形式与自动换刀程序的调试
加工中心的刀库形式与自动换刀程序的调试————————————————————————————————作者:————————————————————————————————日期:ﻩ加工中心的刀库形式与自动换刀程序的调试一、实训目的( 1 )了解加工中心的各种刀库形式;( 2 )了解机械手换刀的基本动作组成;( 3 )掌握加工中心自动换刀程序的编写与调试运行;二、预习要求认真阅读加工中心组成、换刀装置、自动换刀程序的编写等章节内容。
三、实训理论基础1 .加工中心的刀库形式加工中心刀库的形式很多,结构各异。
常用的刀库有鼓轮式和链式刀库两种。
图 11-1鼓轮式刀库( a )径向取刀形式( b )轴向取刀形式 ( c )径向布置形式( d )角度布置形式鼓轮式刀库结构简单,紧凑,应用较多。
一般存放刀具不超过32 把。
见图 11-1。
径向取刀形式( a )多用于使用斗笠式刀库的立式加工中心和使用角度布置的机械手换刀装置的加工中心;形式( b )应用比较广泛,可用于立式和卧式加工中心,换刀可用机械手或直接主轴移动式换刀。
由于从布局设计方面的考虑,鼓轮式刀库一般都采用侧向安装的结构形式,若用于机械手平行布置的加工中心时,刀库中的刀袋(座)通常在换刀工作位可作90 o 翻转。
形式( c )多用于小型钻削中心;形式( d )一般用于专用加工中心。
链式刀库多为轴向取刀,适于要求刀库容量较大的加工中心。
见图11-2 。
图 11-2 链式刀库2 .自动换刀装置及其动作分解斗笠式刀库换刀装置我们已经在实训 4 中接触过,在此就不再赘述。
对于刀库侧向布置、机械手平行布置的加工中心,其换刀动作分解见图11-3。
换刀时,Txx指令的选刀动作和M6指令的换刀动作可分开使用。
图 11-3平行布置机械手的换刀过程图11-4 角度布置机械手的换刀过程对于刀库侧向布置、机械手角度布置的加工中心,其换刀动作分解见图 11-4 。
机械手换刀装置的自动换刀动作如下:(1)主轴端: 主轴箱回到最高处( Z 坐标零点),同时实现“主轴准停”。
FANUC刀库换刀——详解.
加工中心机床圆盘式刀库发那科系统PMC的编程技术安庆长谷川数控机床有限公司 雷晓鹏北京发那科机电有限公司 胡 年自动换刀机构(ATC)是数控机床易发生故障的地方。
本文介绍PMC的编程思路和方法,供大家讨论。
此程序自2004年始已在数百台加工中心运用。
一、基本规则1、刀具在D0000到D0032登录。
D0000登录主轴刀具号,D0001到D0032登录刀套内刀具号,在此假定刀库容量为32把刀。
2、执行T码时,刀库中T码刀具旋转到换刀口位置,在刀库旋转过程中,程序自动加工运行不中断,称之为预选刀。
3、M6执行换刀过程,执行前,Z轴必须回第一参考点,即 G91 G28 Z0或 M19 G91 G28 Z0。
4、允许的大径刀(如面铣刀)直径不容许超过普通刀具(以下简称:小径刀)最大直径的二倍,否则大径刀之间随机交换会撞刀。
刀具重量不能超过刀库容许重量。
大径刀刀具号设定规则:大径刀的相临两侧刀套内必须为空,空刀套的刀具号自动设定为99(也可设定其他数字,PMC识别为空刀)。
D100内设定大径刀个数,小径刀刀具号必须大于大径刀个数乘2加1。
初始设定主轴刀具号D0000必须是小径刀刀具号。
5、大径刀具交换规则:小径刀可放进大径刀刀套内,大径刀不可放进小径刀刀套内。
主轴小径刀与刀库小径刀交换,一次性换刀;主轴大径刀与刀库大径刀交换,一次性换刀;主轴小径刀与刀库大径刀交换,一次性换刀,小径刀放进大径刀刀杯套内;主轴大径刀与刀库小径刀交换, 第一次将原大径刀刀套内的小径刀换到主轴上,第二次再进行小径刀之间的交换。
以上交换规则PMC自动识别换刀。
6、在刀库运行中发生停电等故障,具备中断点记忆和用按键操作恢复功能。
有完善的电机保护和报警操作提示。
7、以上自动刀具交换(ATC)动作本文介绍的都用PMC完成,读者也可用宏程序和PMC结合编程实现。
二、PMC程序框图三、详细介绍刀库盘旋转部分PMC程序和说明1、准备工作自动换刀部分反馈信号:R30.0=1 主轴抓刀反馈;R30.1=1 主轴松刀反馈,延迟0.2秒是消除信号反馈传感器安装误差,其它信号反馈延迟道理相同;R30.2=1 刀杯上(水平位置)信号反馈;R30.3=1 刀杯下(刀具垂直向下位置)信号反馈。
加工中心刀具的装卸及对刀过程

加工中心刀具的装卸及对刀过程入门指导:一.加工中心刀具的装卸1.库上刀具的装卸:①选择手动、手轮、增量寸动等操作方式②通过手动换刀键将刀库内的刀号旋转到装刀位③将刀具(刀具上的凹槽要对准刀槽内的凸起)沿着刀槽平行推入★切记:a.在刀库内不能装屏幕上所显示的刀号,否则必撞无疑b.在按手动换刀键的频率不能过快,否则必乱无疑④卸刀则反2.主轴上刀具的装卸:①在手动、手轮、增量寸动等方式下②将刀具对准主轴的锥孔向上推入(注:刀具上的凹槽要对准主轴上的凸起)③按下主轴上的气压电磁阀开关按钮(注:此时另一支手紧抓刀具)3.刀夹上刀具的装卸:二.加工中心自动换刀1.指令格式:T___M06(对应刀盘里的刀的位置号)2.自动换刀步骤:★切记:刀盘(刀库)里的刀号要与程序里的刀号一致①选择〔单节程式〕操作方式②按F3(MDI输入)③输入换刀指令及刀号④执行〔循环启动〕(即:单节程式→ F4→ F3 → T_ _ → ENTER)三.刀库混乱的处理方法:(引起混乱的原因:突然断电、手动换刀时刀库转动过快、程序出错)1.把刀具全部取下2.利用刀库正反转使刀库的“1号”刀位正对准主轴3.选择〔原点复归〕操作方式4.一直按住刀库的正转按钮,直到屏幕上出现主轴上的刀号为“1号”刀为止5.进行自动换刀检验刀库是否调整好(即:单节程式→ F4 → F3 → T_ _ → ENTER)四.加工中心的对刀(一)对刀前预备设定:1.选择主轴转速为800r/min以下2.基准刀一般选择精加工刀具3.设定基准刀的补偿值为零(二):分中对刀:(原理与铣床分中对刀一致)1.对X轴:①利用手轮方式,将基准刀轻轻地碰上工件或毛坯的侧面;②提刀;③F1(机台设定)→输入X → F3(清除坐标);④将基准刀移到X轴方向的另一个侧面上,直到接触为止;⑤提刀;⑥ F1(机台设定)→输入X → F2(1/2坐标);2.对Y 轴:(同理对X轴)3.对Z轴:①利用手轮方式,将基准刀轻轻地碰上工件或毛坯的侧面② F1(机台设定)→输入Z →F3(清除坐标)(三)零点偏置:(坐标系的设定)1.前提:将刀位点与编程原点重合时才按照以下步骤进行2.步骤:按F5(设定工件坐标系) →移动光标选择对应的坐标→按F1(自动坐标系设定)(四)刀补设定:(是指刀具的长度补偿)1.将基准刀所对应刀补值清零2.利用单节程式,调用第二把刀具(粗加工刀具)3.利用手轮方式,将此粗加工刀具轻碰上工件上表面时,把此时在屏幕上所显示Z轴相对坐标值记下来4.按F4〔执行加工〕→按F5〔刀具设定〕→将刚记下的坐标值输入到第二把刀具号所对应长度补偿位置处5.其余刀具补偿设定同理第二把刀具设定巡回指导:分组练习1.现场指导分中对刀的步骤及方法2.指导设定工件坐标系3.检查学生所设定的刀具补偿值结束指导:1.由学生提问题并及时解答2.课后总结。
加工中心刀库自动换刀的控制
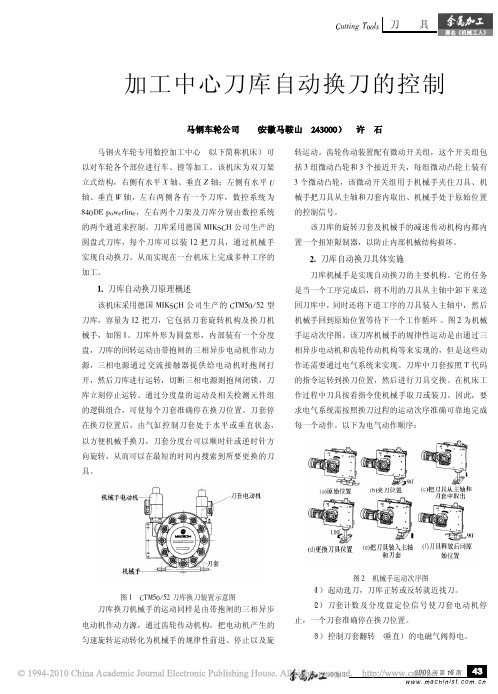
#" 镗刀杆! $" 镗刀! (" 上下调整螺钉 ’" 两侧调整螺钉
图! #
此刀具的特点:可用于组合机床或其他机械加工机 床,结构紧凑,制造简单,使用灵活。效率高,且在刀 具磨损后可调整继续使用,有效延长刀具寿命,减小机 床夹具调整时间。
( 收稿日期:$&&5&$#5 )
############################################
冷加工
! " " # 年 第 $% 期 # !" ! ! !" " # $ % & ’ & ( )" $ * "" $ ’
刀! ! 具
!"##$%& ’(()*
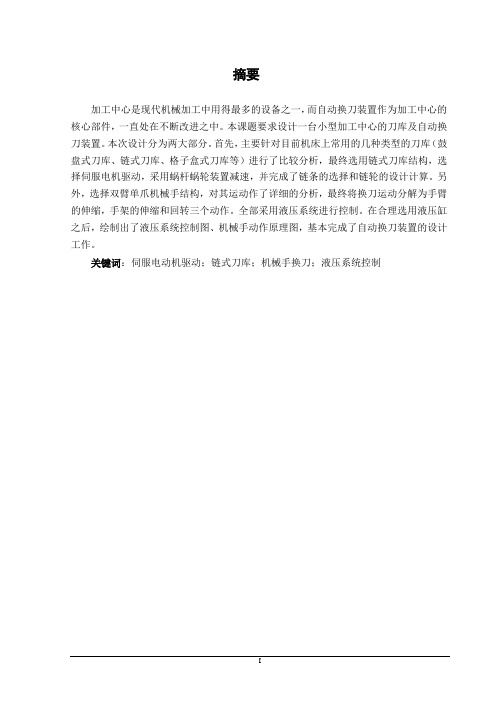
( # ) 刀套垂直到位,发出到位信号,主轴定向给出 位置到达确认信号。 ( $ ) 机械手从原始位置起动,旋转 %&’ 到达机械手 夹刀位置。 ( ( ) 机械手抠刀到位发出停止信号,把刀具从主轴 和刀套中取出,机械手电动机停止。 ( ) ) 抠刀确认及刀具松开给出到位信号。 ( * ) 刀具夹放松完毕,起动机械手旋转 +*&’ ,到达 刀具更换位置。 ( % ) 机械手电动机停止信号使机械手电动机停止。 ( +& ) 装刀确认及刀具夹紧给出到位信号。 ( ++ ) 机械手电动机起动,使机械手回到原始位置。 ( +, ) 机械手电动机停止信号,使机械手电动机停 止。 ( +- ) 机械手原始位置开关发信号。 ( +# ) 控制刀套翻转 ( 水平) 的电磁气阀得电。 +$ ) 刀套翻 转 处 于 水 平 位 置 的 接 近 开 关 发 信 号 ( ( 刀库换刀动作完成) 。 刀库及机械手的动作可以由 ./ 来控制,也可以由 01/ 来控制,由于该刀库选用的普通的 三 相 异 步 电 动 机,故采用 01/ 来控制刀库及机械手的动作。由于该机 床数 控 系 统 为 *#&23 456789:;7, 它 内 部 集 成 了 <) — -+$ —,20 的 01/ 系统,为 01/ 编程控制刀库和机械手 的动作提供了方便。01/ 程序设计采用了模块化、参数 化和标准化的编程方法,按控制功能将程序块分成不同 的功能块,利用程序块形式的参数编程特点,将控制功 能程序标准化。程序结构如图 - 所示。
加工中心自动换刀系统设计说明书
摘要加工中心是现代机械加工中用得最多的设备之一,而自动换刀装置作为加工中心的核心部件,一直处在不断改进之中。
本课题要求设计一台小型加工中心的刀库及自动换刀装置。
本次设计分为两大部分。
首先,主要针对目前机床上常用的几种类型的刀库(鼓盘式刀库、链式刀库、格子盒式刀库等)进行了比较分析,最终选用链式刀库结构,选择伺服电机驱动,采用蜗杆蜗轮装置减速,并完成了链条的选择和链轮的设计计算。
另外,选择双臂单爪机械手结构,对其运动作了详细的分析,最终将换刀运动分解为手臂的伸缩,手架的伸缩和回转三个动作。
全部采用液压系统进行控制。
在合理选用液压缸之后,绘制出了液压系统控制图、机械手动作原理图,基本完成了自动换刀装置的设计工作。
关键词:伺服电动机驱动;链式刀库;机械手换刀;液压系统控制AbstractProcessing Center is a modern mechanical processing equipment used in one of the largest and automatic tool change device as the core parts processing center, has been in the continuous improvement of. The topics designed a small knife processing center for devices and automatic tool change. The design is divided into two parts. First of all, the main view of the current machine, commonly used for several types of knives (knives drum disc library, the chain knife, knife lattice cassette library, etc.) a comparative analysis, the final choice of the chain knife structure, choice of servo motor Driver, a worm worm deceleration devices, and completed the chain and sprocket of the choice of design and calculation. In addition, the choice of single-claw manipulator arms structure, its movement made a detailed analysis will eventually ATC campaign for the decomposition of the telescopic arm, hand-stretching and rotating the three movements. All the hydraulic system used to control. A reasonable choice of hydraulic cylinders, to map out plans of the hydraulic control systems, mechanical hand movements schematics, basically completed the installation of automatic tool change the design work.Keywords:The servo motor actuates; Chain knife storehouse; The manipulator trades the knife; The hydraulic system controls目录目录摘要 (I)Abstract (Ⅲ)1 绪论1.1 本课题的来源、目的及意义 (1)1.1.1 课题的来源 (1)1.1.2 本课题研究的目的 (1)1.1.3 本课题研究的意义 (1)1.2 课题背景及国内外研究现状 (2)1.3 本课题研究的主要内容 (3)2 刀库及换刀机构总体结构设计2.1 刀库的结构设计 (3)2.1.1 方案分析比较 (3)2.1.2 刀库容量的确定 (6)2.1.3 刀库选刀方式的确定 (6)2.1.4 刀库的设计及计算 (6)2.2 自动换刀装置设计 (13)2.2.1 方案分析比较 (13)2.2.2 机械手自动换刀工作流程设计 (13)2.2.3 换刀机械手结构设计 (22)2.2.4 换刀手手臂和手爪结构设计 (23)2.2.5 液压缸、活塞杆的选择 (24)2.2.6 液压系统工作原理 (26)设计总结 (27)致谢 (29)参考文献 (30)1 绪论1.1课题的来源及研究目的和意义1.1.1课题的来源刀库和机械手是加工中心稳定可靠运行的关键功能部件。
XAH/785立式加工中心换刀机构分析

刀) .所 选刀 具到达 换刀 位后定位 ;主轴 吹气 ,主
轴从 P 5到 P 4点 .主 轴 紧刀 ,吹 气停 ;主轴 回到 P 1点 .即 P 一 P 一 P 一 P :换 刀动 作 完 成 .刀 4 3 2 1 库 门关 闭 。
位 后 定 位 : 主 轴 吹
气 .主 轴 从 P 5点 移 到 P 4点 .主轴 紧刀 . 吹 气 停 : 主 轴 回 到
P 1点 . 即 P — 3 4 P一
意 图
P 一P ;换刀 动作 完 2 1
1 找刀
此机 床采 用 固定 刀 位 .双 向近 程 找 刀方 式 , 换 刀动作 由 P C控 制 。刀库 容 量 2 L 0把 ,刀 库 上 标 明 12 — 0刀 位 号 . 当 C C装 置 发 出 找 刀 命 令 N T x .刀库 以近 程找 刀 方 式快 速 旋 转 .到 达 所 x后
我 分 厂 有 一 台北 京 第 一 机 床厂 生 产 的 X H A / 7 5立 式 加 工 中心 .它 采 用 8 2 的数 控 系 统 . 8 0D 6l l U的 驱动 系统 .此 机 床没 有 机 械 手 .换 刀 动
作 由主轴 箱 X、Z向运动 和刀 库 盘 的 回转定 位 运 动共 同完 成 。
回零 ,刀 库定 位 .刀 库 门打开 .主轴定 向 ,主轴
将 结束 工作 的刀具还 回刀 库 ,变 为无刀状 态 。
2 1 取 刀 .
取刀 是主轴 无刀 时的换 刀过 程 ( 图 1 。在 见 )
到达 P 1点 :主轴 从 P 1点 X 向移 到 P 2点 ;主轴
从 P 2点正 向移 到 P 3点 :主轴 从 P 3点移 到换 刀
加工中心换刀程序的编制

否 ,直接 影响 到加 工 中心 _作 U l : 。 。在 编制加 靠性
I 中心 的 P C 序 中 , 刀具 选择 序 的编 制放 在 L 把
令 L输入的 T码十 比较,只要人 r j 『 1 某个 先确定的 / 值 , 为人 。 』 J J
法 之 : J _ 先编制 两个 数 农 , 一 以事 个为
定 今后 的换 刀动 作 。在 编 制 决 定 具 性 质 的 程 j
轴上 的 J 也足 人 , 人 刈 人 刀,那么就 l 以 J l J 接 进 行 换 刀 。假 如 是 人 刀 对 小 刀 或 小 对 大 J 时 ,情 况就不 样 了。由丁 刀的类 同 , 可能 用 r 较 大 位 置 的 大 / 放 到 占有 较 小位 置 的小 刀 有 』 J
是 醣原土轴 L的刀号应传递 到刀库 中换过 的刀套
卜 n 轴 1 J ,l主 J 4 的 号即为 己换 好 , 的 T码 刀 号 。经 / J
因此 在换 刀前必 须 先确定 换 刀的次 数 ,然 后才 能 正确地换 刀 。表 1 山 了几 种换 次 数 的可能 。 给 根 据 下表 所 列 换 刀 次 数 ,编 制 出相 应 的换 刀 程 序
只 要是 ‘ 的话 ,就 f 致 以确 定 T码 的 足 大 ,否 J
则是小 刀 。
。
求 能就 近选 等 ,很 为复杂 。 J 的选择 是 加 T・ J 具 l
心 的换 刀 过 稗 中 ‘ 重要 步骤 ,其选 择 【确 L 个 j
法 之二 :首先确 定 。 人 刀的范 用 比较 指 个
主轴 . 卜,主轴 要 拉 刀,把 具 紧 紧地装 在主 轴上 , 紧接着 机 械于 反转 9 。 0 ,完成 了换 刀的最后 步骤 , 称 为 A C回 零 。之 后 刀库 的 刀要 同刀 ,即反转 9 。 T 0 度 同 到刀 库 中去 。整 个换 过程 在 几十 秒 内完成 。 J 完成 这 个复杂 的 换刀 过程 是通 过宏 程 序来实 现 ,每
加工中心机械手换刀过程详解

机械手换刀程序蜗杆轴承凸轮,端面凸轮和凸轮滚子是做在一起的这两根轴固定蜗轮[Kh765Al Ladder Diagram F;0032-HFM16经过译码指令译码后186扣刀过程: M06调用换刀宏程序,Y 轴回到第二参考点,主轴定向完成后, :F:O 們 1-—lh H16―IF R0039™. ―IFR0039r —lhA. 6025RO612..6―IF-RO512.7—IF-NOO99& 匚 SO34K0003u5-HIO-TSK ・ HC―II —NOQaB^I E W43K000 3--4—<0-TEK ・匚匚NOO09O G €046NOO991 I S060ROOSS ・ 4RO L1 J .2Nooa^z K 6Q65—RC?050r3—II —NOO993M 6Q71ROOSO-3—11R&OS5.2—II —NOO694O 6078KOO55.2 —I —R0054™ —lhxoooe :... —I 卜EXGr i :TFO039.—dF 兰口口D3.6 —II — T5K ・ UFF ;ROE-12,7—0—FOO45・了 □ KARAXOO0A. -4 —fl[HEH 焉,i ;T—117MC - £T¥0003-&—TEJ<・ DR—I —、:「m 「.—OTEHG , STROD36・1 F;OO52 ・ERO0S 斗.4—0—FOO : •—ClROO55・2RO049・7—CH-―11 XOOOfl .4 K0512,€ —II —Y0002B 4 —JkTC. ONKOOO9 ・ 4 TlEHG a STRO 052■酝 m —RO039・d―11 Y0003■申 —ATC-.0 忡H00E.&-2 —XODOO ・3 —BO — ®Fr LDR003&・O—]\—R512.6由换 刀宏程序里的换刀指令 M16控制Y 轴回到第 ―'介严Jtr 二参考点机械手原位信号机械手停止信号主轴松刀扣刀指令SIFBTIJ TMRBQQQ 丁0000000100K *4^3WOW F edO3TJOO 今卫會 H 11MOO9 B1 J 衣 0 1!9TJDQ34 每rd o o s o I «S4 15NOO95« O 召四39TJOO^4 & A ^30 8NQO9^3 <S*4 07。
数控加工中心的自动换刀系统设计
数控加工中心的自动换刀系统设计摘要本设计介绍了加工中心自动换刀装置的机械手结构的部分设计、相关液压缸的结构设计以及控制系统的设计,最终实现自动换刀动作;介绍了目前实现快速自动换刀技术的基本方法和各种途径,及其在加工中心上的应用情况和实际达到的技术指标,从而可看出这方面的发展趋势。
换刀装置作为加工中心的重要组成部分,其主要作用在于减少加工过程中的非切削时间,提高生产率,降低生产成本,进而提升机床乃至整个生产线的生产力。
加工中心自动换刀装置是实现多工序连续加工的重要装置,其结构设计及其控制是实现加工中心设计制造的关键。
加工中心的换刀过程较为复杂,动作多,动作间的相互协调关系多,因而自动换刀系统性能的好坏直接影响加工效率的高低。
带有自动换刀系统的数控加工中心在现代先进制造业中起着越来越重要的作用,它能缩短产品的制造周期,提高产品的加工精度,适合柔性加工。
加工中心是数控机床中较为复杂的加工设备,由于其具有多种加工能力而得到广泛的应用,其强大的加工能力和效率得益于其配置的自动换刀装置(Automatic Tool Changer)。
关键词:自动换刀,机械手,设计,加工中心CNC MACHINING CENTER AUTOMATIC TOOLCHANGING SYSTEMABSTRACTThis paper introduces the structure of Automatic Tool Changer,And the single chip microcomputer is used to achieve the process of automatic tool changing.The cutting tool recognition system uses the cutting tool encoding method, this way is to carries on every time the cutting tool the code, because has every time the cutting tool own code, therefore, may deposit in Y u Daoku any tool apron. In such knife storehouse, simultaneously also reduced the knife storehouse operating time; Simplified has traded the knife control wiring automatically. May complete grasps the knife to draw a sword the rotation slotting tool returns and so on a series of movements.Trades the knife installment to take the machining center the important component, its leading role lies in the reduction processing process the non-cutting time, raises the productivity, reduces the production cost, then promotes the engine bed and even the entire production line's productive forces. The machining center automatically trades the movement are many, the movement intercoordination relates much, thus trades the knife system performance automatically the quality immediate influence processing efficiency height. Has trades the knife system's numerical control machining center to play more and more vital role automatically in the modern advanced manufacturing industry, it can reduce product the manufacturing cycle, enhances the product the working accuracy, suits the flexible processing. The machining center is in the numerically-controlled machine tool the more complex processing equipment, because it has many kinds of working capacities to obtain the widespread application, its formidable working capacity and the efficiency benefit from its disposition trade the knife installment automatically (Automatic Tool Changer).KEY WORDS: automatic tool changer,single chip microcomputer,design,The machining center目录前言 (1)第1章设计任务书 (2)1.1 本课题的内容和要求 (2)1.2 毕业设计目的 (2)第2章总体方案的设计 (4)2.1 换刀过程 (4)2.2 伸缩与旋转运动的确定 (5)2.2.1 液压传动的优缺 (5)2.2.2 液压传动装置的组成 (6)2.2.3 液压系统中在机械手中主要实现的辅助功能 (6)2.3 主要参数的确定 (7)2.3.1 工作行程 (7)2.3.2 运动速度 (7)2.3.3 驱动方式 (8)2.3.4 定位精度 (8)2.3.5 液压系统元件的选择 (8)2.3.6 液压系统的控制原理 (8)2.3.7 机械手液压系统的工作原理图 (11)第3章机械手各部分的设计 (13)3.1 驱动液压缸的设计 (13)3.1.1 液压系统的优点 (13)3.1.2 液压缸的设计 (14)3.2 花键轴及轴套的设计与校核 (16)3.2.1 花键轴的设计 (16)3.2.2 花键的校核 (18)3.3 轴承的选择与润滑 (19)3.4 齿轮的设计与校核 (20)3.4.1 齿轮的设计 (20)3.4.2 齿轮的校核 (21)3.5机械手臂及手抓的设计 (23)3.5.1 对设计手臂的要求 (24)3.6 立柱和机座 (25)3.6.1 立柱 (25)3.6.2 机座 (25)3.7 刀库及换刀机械手的常见故障和维护 (26)3.7.1 刀库的故障 (26)3.7.2 换刀机械手故障 (26)结论 (28)谢辞 (29)参考文献 (30)外文资料翻译 (32)前言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
加工中心自动换刀程序的设计与调试

s c r e e n o f t h e t o u c h s c r e e n .F a c t h a s p r o v e d t h a t t h e A T C ma k e s t h e p r o d u c t i o n p r o c e s s i n a g o o d r u n n i n g s t a t e , a n d i t p u t s u p t h e p r o —
L I U L u.C HANG Xi a o l i n g
( G u a n g d o n g I n d u s t r y C o l l e g e ,G u a n g z h o u G u a n g d o n g 5 1 0 3 0 0 ,C h i n a )
t o o l pr o c e s s ,a p p l y i ng t he i n n e r PL C o f NC ,t h e p r o g r a m o f ATC wa s d es i g n e d.The d e bu g g i ng wa s c o mp l e t e d b y t he c o o r d i na t i o n o f t h e
关键词 :加工 中心 ;自动换 刀;P L C ;触摸屏
中 图分 类 号 :T P 2 7 文献 标 识 码 :A 文 章 编 号 :1 0 0 1— 3 8 8 1( 2 0 1 3 )2 0—0 6 4— 4
Pr o g r a m De s i g n a n d De bu g g i ng o f t h e ATC o f t h e Ma c h i n e Ce nt e r
加工中心换刀的三个步骤及流程
加工中心换刀的三个步骤及流程English Answer:Step 1: Preparation.Access the tool magazine and locate the desired tool.Ensure the tool is securely fastened in the tool holder.Clean the tool holder and spindle taper.Step 2: Tool Change.Initiate the tool change command using the machine's control panel.The machine will move the spindle to a safe position and retract the current tool.The tool arm will then extend and retrieve the desired tool from the magazine.Step 3: Tool Calibration.Once the new tool is installed, it must be calibrated to ensure accurate machining operations.This typically involves setting the tool length and offset values using a probe or manual measurement.After calibration, the tool is ready for use.Chinese Answer:步骤 1,准备。
进入刀具库,找到所需刀具。
确保刀具牢固地固定在刀柄上。
清洁刀柄和主轴锥度。
步骤 2,换刀。
使用机器控制面板启动换刀命令。
机器将将主轴移动到安全位置并缩回当前刀具。
MC12加工中心换刀位置及刀库零点调整思路

MC12加工中心换刀位置及刀库零点调整思路文章以MC12加工中心为例,分析西门子840D数控系统换刀位置设置方法,并建立数学模型,分析刀库零点调整思路。
标签:MC12;840D数控系统;换刀位置;刀库零点由德国HELLER厂家生产MC12加工中心采用西门子840D数控系统,其换刀位置以及刀库零点的准确程度会直接影响到刀夹的使用寿命和发生换刀卡死、掉刀的概率[1]。
X、Y轴重新校正原点,更换刀夹,机械磨损,机床搬迁,参数丢失等,都需要对换刀位置进行校验。
1 换刀位置设置进入换刀过程维修模式(维修模式下可以按手动方式逐步执行换刀动作),操作过程一定要格外小心,合理降低机床进给轴倍率,避免发生机械碰撞,让主轴缓慢抓刀,观察刀具在X、Y方向与主轴锥孔中心的偏差,最好由钳工观察并估计相对准确的偏差值。
在840D数控系统中,换刀点相当于系统启动时执行一个宏程序文件,这个文件放在“/CMA/”目录下,该文件一般以H开头+机床编号的形式命名,要编辑该文件可以从【Services】软件,进入Manufacturer-cycles.DIR(制造商目录),打开这个目录后找到该文件,按回车键及可进行编辑。
例如:制造厂编号为52967的设备,其文件则为H52967.SPF,如图1所示。
修改设置完成之后,重新启动机床,该文件生效,再次利用维修模式,缓慢执行换刀动作,再次对刀具在X、Y方向与主轴锥孔中心的偏差进行校验,直到刀具与主轴锥孔中心对齐。
2 刀库零点調整模型西门子840D数控系统轴参数【Axis MD】中的MX1轴的34090参数[2]为刀库零点调整参数,其值的大小的单位是角度。
MC12刀库共包含42各刀位[3]。
该机床找正参考点就是调试该参数的过程。
下面我们介绍该参数调试的基本思路,如图3所示,不妨设机床现在回参考点位于4号刀位,而标准参考点应该是42号刀位。
以上就是刀库参考点找正的数学模型及基本思路,依照此方法经过多次调试后即可找正参考点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十章、加工中心换刀程序分析10.1 加工中心的换刀程序分析10.1.1机床及换刀机构机床外观主轴和机械手刀套落下动作换刀过程中10.1.2 换刀动作分析这种类型的加工中心的整个换刀过程包括刀库找刀和换刀两个独立的动作。
刀库找刀也叫刀具调用,当机床的操作者通过程序命令,例如:T12,从刀库调用12号刀时,PMC检索12号刀具所在的刀套号,再进行刀库正反转判别,控制刀库旋转;当然还有手动刀库的旋转操作,完成手动装卸刀具。
换刀动作集合了刀库、机械手、主轴三方面的动作,整个过程是一个顺序动作的过程,本章以一台立式加工中心的换刀程序为例,分析换刀程序的程序结构、程序内容,加工中心的生产厂家为台湾丽伟计算机机械股份有限公司,VB系列机床,采用的是FANUC-0IMB系统。
该机床的换刀机构包括:刀库、机械手、主轴拉刀机构。
刀库采用侧装式,安装在立柱上,由三相异步电机通过减速机构带动刀库旋转,通过接近开关检测刀库计数和刀库回零。
换刀时位于刀库最下位置的刀套在刀套抬起/落下油缸的驱动下可完成抬起落下动作。
机械手的旋转、抬起落下等动作是在机械手电机的驱动下,通过一套凸轮机构来完成,换刀动作平滑、快速。
由接近开关检测机械手的关键位置,配合换刀时的其它机构的动作。
主轴拉刀机构完成主轴刀具的夹紧和松开操作,并有接近开关检测主轴刀具的夹紧或松开状态。
通过顺序动作的步骤一步步完成换刀。
以程序控制自动换刀来解释整个换刀过程10.1.3换刀电路:10.1.4换刀程序地址说明:加工中心的换刀程序比较复杂庞大,所涉及的地址较多,为便于阅读梯形图程序,将所涉及的地址放在附录。
10.1.5 换刀程序介绍该机床的PLC类型为SB7,下图是该程序的清单,与换刀有关的程序内容出现在一级程序、二级程序,没有为换刀专门编写子程序。
因为,换刀过程中机械手动作较快,机械手的60度、中间点、180度的检测信号出现的时间很短,所以将这部分的程序放在一级程序,保证8ms能处理到这种信号。
在二级程序中,换刀程序包含:刀具检索、换刀过程状态记忆、手动换刀、自动换刀。
一级程序中的换刀程序分析:一级程序中只是将需要快速处理的换刀程序信号做了一个收集,没有顺序动作,包括以下处理内容:(1)机械手返回点、中间点、停止点的程序分析:1、k3.1用来设定机械手接近开关的类型,当接近开关使用常开触点时,设定k3.1为1,使用常闭触点时,设定k3.1为0。
三段程序处理机械手返回点、中间点、停止点的信号。
2、该机床的换刀机械手采用凸轮机构,动作快,机械手位置信号都是窄脉冲信号,将这些信号的处理放在一级程序,保证每8ms有一次刷新。
3、机械手有两个中间停止点,60度和180度两个位置,在60度位置时,机械手电机继续旋转但机械手不转,而执行机械手向下拔刀;在180度位置时,机械手电机继续旋转机械手不转,而执行向上装刀。
用一个接近开关配合两个检测挡块,当机械手转到这两个位置时R529.0均为1。
(2)机械手离开停止点R529.2处理的是机械手离开停止点的状态,表示机械手已开始转动,后面程序中处理机械手60度旋转到位、180度旋转到位等都用到这个信号。
当机械手旋转60度、180度延时到达后将R529.2复位。
k7.6为1时设定机械手的停止点使用60度和180度到达信号。
当K7.6为0时,使用主轴刀具夹紧松开标志信号.(3)在机械手旋转到60度、180度时,机械手电机继续旋转,但是根据凸轮的结构,机械手停止旋转,开始机械手拔刀、装刀动作。
以下程序处理机械手60度、180度的到达信号,程序的原理是:在自动换刀步骤中(第二步A2-R540.1;第四步A4-R540.4;第六步A6-R541.0),机械手从离开停止点R529.2到检测到机械手停止信号R529.0,即是到达了60度、180度位置。
这些位置到达信号一个目的是用于启动下一个换刀步骤,另一个目的是控制机械手电机的旋转。
在机械手转到60度时检测是否有主轴刀具松开X2.1的错误信号.在机械手转到180度时检测是否有主轴刀具夹紧X2.0的错误信号(5)主轴刀具松开处理:主轴刀具松开包括自动刀具松开和手动刀具松开,根据自动换刀动作在机械手旋转60度到达、拔刀过程、换刀过程、机械手装刀过程自动刀具松开。
手动刀具松开是手动方式下,按送到按钮来执行。
从程序中分析,自动刀具松开是在第二步骤R540.1情况下,当机械手旋转到达60度R529.3后启动。
当机械手再旋转180度R529.4到达后,下一个动作是主轴刀具夹紧。
自动刀具松开R538.0或手动刀具松开R537.7时,输出主轴刀具松开Y6.3,加工中心的主轴刀具夹紧机构在刀具夹紧时,是通过蝶形弹簧的弹力来保持的,当松刀时,增压气缸活塞杆伸出压缩蝶形弹簧,使松刀机构松开刀具,控制气缸换向的电磁阀是单作用阀。
所以没有刀具夹紧的输出信号。
(6)机械手电机旋转处理根据自动换刀的顺序过程,组合出在哪一个步骤机械手电机需要旋转,通过“或”逻辑完成。
M95是机械手故障检查指令,R544.5用于检测机械手是否在停止位,如果不在正确的停止位置,执行M95指令时机械手继续旋转到正确位置。
k7.6为1时设定机械手的停止点使用60度和180度到达信号,当K7.6为0时,使用主轴刀具夹紧松开标志信号.(7)刀库计数处理刀库计数处理程序,X4.5为计数开关输入地址,由K5.7来设定选用其常开触点或常闭触点,用典型的上升沿下降沿处理程序获得计数脉冲(R530.1上升沿信号,R531.7下降沿信号),使用基本逻辑指令编辑上升沿和下降沿指令比使用上升沿和下降沿功能指令节省程序的处理时间。
R500.0为置1逻辑,用于给计数器的控制条件赋值。
刀库计数说明:计数器的初始值为1(R500.0),根据刀库的旋转方向(R531.3)来决定是正计数还是负计数。
不对计数器进行复位(R500.0)刀库正转(R531.0)或反转(R531.3)时,对计数开关脉冲(R530.1)进行检测计数。
D110是计数器的预设值,也就是刀库容量。
D100记录的是当前的刀套号。
(8)刀库旋转处理以下为刀库正转控制:R530.4为刀库手动正转启动,R536.0为刀库自动正转启动,由检索程序判别,指定刀库正转启动。
以下为刀库反转控制:R530.5为刀库手动反转启动,R536.1为刀库自动反转启动,由检索程序判别,指定刀库反转启动。
二级程序中换刀程序的分析:1、刀库手动旋转控制:包括刀库准备处理、手动正转/反转刀库准备好信号条件包括:机床准备好F1.7、急停信号G8.4、刀库错误条件R536.5、刀库换刀位置刀套在抬起位R539.3。
刀库手动正、反转控制。
条件:不在刀具检索过程中R534.2,在手动方式R513.1、按刀库旋转按钮R584.3/按刀库正转按钮R577.0刀库正转启动程序,按刀库手动启动按钮,刀库正转;当刀库电机开始正转后,R530.4被复位。
执行的结果是按刀库正转按钮,刀库转位;松开按钮后,刀库再转一个刀套位。
刀库反转启动程序,按刀库手动反转按钮,刀库反转后;当刀库电机反转运行后,R530.4被复位。
执行的结果是按刀库反转按钮,刀库转位;松开按钮后,刀库再转一个刀套位。
2、换刀时刀具表的处理:刀具表的处理流程刀具容量赋值:K8.5,K5.1用于设定刀库容量:K8.5=0,K5.1=0,刀库容量为20;K8.5=0,K5.1=1,刀库容量为24;K8.5=1,K5.1=0,刀库容量为30;K8.5=1,K5.1=1,刀库容量为32;NUMEB为定义二进制常数指令,在程序中指定数据格式为两字节,将指定的数据赋值到D110,D110存储刀库容量数据。
刀具表的赋值:D110定义刀库容量,D112定义为刀库容量+1,其作用是为刀具表容量赋值,D112为刀具表长度,这样,在刀具表D112中,D0可存储主轴刀号,D1存储一号刀套的刀具号。
以此类推,直到最后一个刀套。
数据转换:进行BIN-BCD码的转换,主要用于COIN指令,COIN指令只能进行BCD码的一致性判别,D125的数据是刀具表的最大值,用来判别主轴刀号、待位刀号是否为空刀号。
对当前刀套号D100进行BCD码转换成D120,用于对当前刀套号内刀具号码的检索判别。
读出当前刀套内的刀具号:XMOVE指令为二进制编址数据传送指令,在这里这条指令从刀套表里读出当前刀套安装的刀具号,D112是刀套表的容量,D000是刀套表的首地址,D100是当前刀套号码,按照此号码,在刀套表中找出对应的刀具号,写到R587.1、判断主轴是否是空刀2、判断主轴刀号是否等于指令刀号3、刀套内是否有刀3、刀具检索处理:当执行T 指令时,PMC 首先在刀具表内检索出T 指令的刀具存放在哪一个刀套内,刀具检索的处理的流程是:刀具检索使能处理:检索使能条件包括:刀套在抬起位R539.4,刀库停止状态R532.1,刀库没有报警R536.5,换刀没有报警R544.2。
数控发出T 指令F7.3后,启动R534.0并保持住,当检索的刀具在刀库换刀位刀套位置R535.4或指令刀具在主轴上时,检索使能复位。
T 代码的转换,该条指令完成刀具指令代码的BIN 到BCD 转换,为后面进行指令刀具与检索到的刀具进行一致性判别指令做准备。
DSCHB为二进制检索指令,在程序中检索指令刀具所在的刀套号,D112指定刀据表的大小,D00定义刀具表的首地址,F26指令的刀具号,R690存储检索出指令刀具所在的刀套号码。
DCNV数据转换:进行数据BIN-BCD的转换,转换的数据用于判断指令刀具所在的刀套号与待位的刀套号是否一致。
二进制方向判断:D110刀库容量,D100当前刀库计数值,R690为刀具刀套号地址,R689为刀具刀套号的前一个刀号地址,R534.7为刀具检索启动信号。
数据转换:用于判断指令刀具所在的刀套号的前一个刀号与计数刀套号是否一致。
判断刀库实际计数刀套号与指令刀具刀套号的前一个刀号是否一致,如果一致刀库开始减速。
刀库旋转减速保持,由刀库旋转到位(指令与实际刀具一致)断开。
4、刀具交换数据处理:机械手进行180度旋转步骤时,主轴刀具与刀套的刀具进行了交换,此时需要修改刀具表。
使用XMOVB二进制变址数据传送,完成在R537.0\R549.0时刻读出当前刀套的刀具号。
D112刀库容量,D000数据表初始地址存放主轴刀具,D100刀库当前刀套号。
R693存放当前刀套内的刀具号。
刀具数据交换过程:D100-->R693D000-->D100R693-->D000XMOVB二进制变址数据传送,完成在R537.3\R549.0时刻将主轴刀号写入到当前刀套内刀具号码,完成刀具数据交换。
D112刀库容量,D000数据表初始地址,D100刀库当前刀套号。