水准测量-武汉大学
(武汉大学)数字测图原理与方法课件-第四章

第4章 水准测量和水准仪 4.1 水准测量原理与方法
4.1.3.1 地球曲率对一根水准尺上读数的影响
设通过仪器中心I的水准面的半径为R,仪器至水准尺的弧长为S,仪器至水准
第4章 水准测量和水准仪 4.2 水准仪和水准尺
2)移动十字丝的“补偿”装置
数
字
测
• 视准轴始终是铅垂位置,
图
• 两个反光镜构成45度角,
原
视准轴经两次反射后射出望远镜的光
理
线必是水平光线.因此十字丝交点上始终
与
得到水平视线的渎数。
方
法
第4章 水准测量和水准仪 4.2 水准仪和水准尺
4.2.5.2 补偿器的补偿原理
与
方
法
观测者的眼睛作上、下(或左、右)移动,若发觉目标像与十字丝之间有相对移 动,这种现象称为“视差”。
消除视差的方法
第4章 水准测量和水准仪 4.2 水准仪和水准尺
4.2.3 水准器及其灵敏度
4.2.3.1 水准管
数
字
测
图
原 理
水准管的零点
与
水准管轴
方 气泡居中
法
水准管分划值τ 水准管上两相邻分划线间 的圆弧(弧长为2mm)所对的圆心角,
水准测量是测定地面点高程的主要方法之一。水准测量是使用水准仪和水准尺,
数 根据水平视线测定两点之间的高差,从而由已知点的高程推求未知点的高程。
字
测
4.1.1 水准测量原理
图 原
H B H A hAB
大地测量参考框架_武汉大学测绘学院

20
• 现代大地测量基准/卫星大地测量基准(几何特征+物理特征):
➢ 总地球椭球(椭球中心与地球质心重合,椭球旋转轴与地球旋转轴重合,椭 球的起始子午面与地球的起始子午面重合,在全球范围内椭球面与地球表面 最佳拟合)
➢ 地球椭球的四个基本常数:地球椭球赤道半径a,地心引力常数GM,地球重
力场2阶带谐系数J2(由此导出椭球扁率f,
2021/8/13
12
The shape of the geoid varies around the globe, therefore different sized ellipsoids have been used for different regions. Each is chosen to fit the geoid as closely as measurement technologies and computational abilities allowed at the time they were established. For example, an ellipsoid which provides a good fit of the geoid over the whole globe is not necessarily the most suitable for North America, and neither would be the most appropriate for Ireland (see the diagram below for an exaggerated depiction).
2021/8/13
10
➢ the size and shape of the ellipsoid, usually expressed as the semimajor axis (a) and the flattening (f) or eccentricity squared (e2). There are a number of techniques used to determine the best fit ellipsoid for an area;
二等水准测量实习心得

二等水准测量实习心得平面控制测量的主要仪器有J6经纬仪、测钎、钢尺。
进行平面控制测量的时候有位组员临时有事没能参加,但是我们仍然完成了任务。
内业计算的时候出现了问题,角度闭合差的数值远大于标准数值,经过我们的慎重考虑,决定第二天重新测量。
下面就是小编带来的二等水准测量实习心得,希望能帮助大家!二等水准测量实习心得1一,实习目的与要求:1,巩固和深化对《数字测图原理》课程的理解,具体包括一下三个方面:熟练掌握常用测量仪器的使用;掌握小地区大比例尺地形图的成图过程与测绘方法;了解数字测图的基本程序及相关软件的应用。
2,培养同学们的基本功,充分锻炼同学们在测,记,算绘个方面的能力。
3,帮助同学们形成良好的团队协作意识和个人责任感。
4,充分认识到测量工作的科学性,精密性,引导专业素质的养成。
5,培养同学们快速,严谨而有创造性的解决实际问题的能力。
二,实习任务:1,每小组施测一条约1km的四等水准闭合路线。
2,每小组完成一幅1:500比例尺地形图(测区面积为150m_150m)的白纸测图。
3,每小组完成老师规定的数字测图任务。
第二部分,实习内容一,实习项目:在老师的分配下,本小组的实习任务由2月13日起,共为时两周,实习具体内容由两大部分组成:一,在武汉大学信息学部,对一条长约1km闭合路线进行四等水准测量,并且闭合路线所包含的区域中应有图书馆,运动场,友谊广场等学校的主要地物;二,在武汉大学信息学部中,以夏坚白雕塑为中心,对周围150米_150米的区域完成一幅1:500比例尺的白纸测图。
整个实习过程中采用的技术规定主要是《城市测量规范》CJJ8-9和《1:500,1:1000,1:2000地形图图式》GB/T7929。
二,测区概况:水准测量与地形图测绘都在武汉大学信息学部内进行,由于学校整体建筑在低矮破碎的丘陵地形上,各点之间相对高程不大,这给水准测量提供了一定的便利。
但就进行地形图测绘的局部区域来说,测区内树木,灌木较多,通视情况一般,且多陡坎,沟渠的复杂地物,给我们并不熟练的地形图测绘带来了一定难度。
武汉大学数字测图原理与方法全套课件第五章

图5-3 经纬仪基本结构
照准部水准器的水准轴与竖轴正交,与横轴平行,当水 准气泡居中时,仪器的竖轴应在铅垂线方向,此时仪器处在整 平状态。 水平度盘安置在水平度盘轴套外围,水平度盘不与照准 部旋转轴接触。水平度盘平面应与竖轴正交,竖轴应通过水平 度盘的刻划中心。 水平度盘的读数设备安置在仪器的照准部上,当望远镜 旋转照准目标时,视准轴由一目标转到另一目标,这时读数指 标所指示的水平度盘数值的变化就是两目标间的水平角值。 经纬仪依据度盘刻度和读数方式不同,分为游标经纬仪、 光学经纬仪及电子经纬仪。目前主要使用电子经纬仪,光学经 纬仪已较少使用,而游标经纬仪早已淘汰。 我国大地测量仪器的总代号为汉语拼音字母“D”,经纬 仪代号为“J”。经纬仪的类型很多,我国经纬仪系列是按野外 “一测回方向观测中误差”这一精度指标划分为DJ07、DJ1、 DJ2、DJ6、DJl5五个等级。例如“DJ6”表示经纬仪野外 “一测回方向观测中误差”为,简写为“J6”。
§5.2 经纬仪 Theodolite
一、 经纬仪的基本构造及分类 经纬仪基本构造,如图5-3所 示。 望远镜与竖盘固连,安装在仪 器的支架上,这一部分称为仪器的 照准部,属于仪器的上部。望远镜 连同竖盘可绕横轴在垂直面内作转 动,望远镜的视准轴应与横轴正交, 横轴应通过竖盘的刻划中心。照准 部的竖轴 (照准部旋转轴)插入仪器 基座的轴套内(图5-3),照准部可 作水平旋转。
图5-7 竖盘的构造 1、竖直度盘;2、竖盘指标管水准器 反射镜;3、竖盘指标管水准器;4、 竖盘指标管水准器校正螺丝;5、望 远镜视准轴;6、竖盘指标管水准器 支架;7、横轴;8、竖盘指标管水准 器微动螺旋
图5-7为J6光学经纬仪竖盘构造 的示意图,图中,竖盘固定在横轴的 一端,当望远镜转动时,随望远镜在 竖直面内一起转动。在竖盘上进行读 数的指标是在读数窗上。竖盘指标水 准管与竖盘转向棱镜、竖盘照明棱镜、 显微物镜组固定在微动架上。竖盘分 划的影像,通过竖盘光路成像在读数 窗上。望远镜转动时(竖盘随着转动), 传递竖盘分划的光路位置并不改变, 所以可在读数窗内进行读数。但是, 若转动竖盘指标水准管微动螺旋,可 使光路产生变化,从而使呈像在读数 窗上的竖盘部位发生变化,即读数发 生变化。在正常情况下,当竖盘指标 水准管气泡居中时,竖盘指标就处于 正确位置。所以每次竖盘读数前,均 应先调节竖盘指标水准管使气泡居中。
水准测量实习报告范文(通用5篇)
水准测量实习报告时间过得真快,一段时间的实习生活已经结束了,回顾过去的实习经历,倍感充实,收获良多,是时候写一篇实习报告好好总结一下了。
但很多人说起写实习报告都是毫无头绪吧!下面是小编收集整理的水准测量实习报告范文(通用5篇),希望能够帮助到大家。
水准测量实习报告1一、实习时间和实习地点实习时间为七天,在这七天里不包括周末,周末正常休息。
实习的地点为校内的公路上。
20xx年6月1日至20xx年6月10日二、实习目的和任务实习的目的(一)掌握水准仪的安置、瞄准、精平、读数、。
首先,是安置水准仪,张开三脚架,调节其长度,使架头大致的水平,压紧脚架,将仪器从箱中取出,放在脚架上,并把连接螺旋拧紧。
其次,是进行粗平,先将三个脚螺旋的高度调成一样,并处于剧中的位置,然后用手前后左右的移动脚架的一条腿,使圆气泡大致居中,旋转角螺旋,使气泡居中。
然后,在读数之前,应用微倾螺旋调整管水准器泡居中,使实现精确水平。
最后,是读数转动目镜调焦螺旋,使十字丝清晰。
转动仪器,用仪器的粗瞄准器瞄准标尺,拧紧制动螺旋。
转动物镜调焦螺旋,使水准尺分化清晰,再旋转水平微动螺旋,使十字丝的竖丝贴近水准尺的边缘。
转动微倾螺旋,使符合水准器气泡影像严格符合。
先估读毫米数,然后米、分米、厘米共四位数一起读出,以毫米为单位。
(二)熟悉微倾式水准仪及自动安平水准仪的基本构造和性能,使用方法水准仪主要是有望远镜、水准器、基座三部分组成。
望远镜由物镜、目镜、调焦螺旋、和十字丝分划板组成。
物镜:将远处的目标在十字丝附近形成缩小而明亮的实像。
调焦螺旋:通过其改变等效焦距,再通过目镜的作用,就可以清晰的看到放大的十字丝和目标影像。
十字丝分划板:其中横丝是用来测高差,而上下两条短丝称为视距丝,用来测量距离。
视准轴望远镜的物镜光心与十字丝中心的连线。
视场:望远镜静止不动时,通过望远镜所能看到的空间。
视差:当望远镜瞄准目标后,眼睛在目镜处上下左右的做少量的移动,发现十字丝和目标有着相对的运动。
《武大大地测量》课件

大地测量的应用领域概述
详细描述
大地测量在许多领域都有广泛的应用,如科学研究、工 程设计、军事侦察、地图绘制等。在科学研究方面,大 地测量可以用于研究地球的形状、地球重力场、地球自 转等;在工程设计方面,大地测量可以用于桥梁、隧道 、高速公路等的设计和施工;在军事侦察方面,大地测 量可以用于精确确定敌方目标的位置和距离;在地图绘 制方面,大地测量可以提供基础地理数据和信息,为地 图绘制提供可靠的依据。
测量和定位。
国家大地控制网在地理信息建设 中具有重要作用,为各种地理信 息应用提供统一的空间基准和时
间基准。
大地控制网的建设需要综合考虑 地球重力场、地球动力学、地球 物理学等多个学科领域的知识。
卫星大地测量在国家地理信息建设中的应用
1
卫星大地测量是一种高精度、高效率的测量技术 ,通过卫星轨道和信号传播等原理实现对地球表 面的精确测量。
计算机科学
随着大数据和人工智能技术的发 展,大地测量与计算机科学的交 叉融合,可以实现更高效的数据 处理、分析和可视化。
统计学
大地测量与统计学的交叉融合, 可以提供更精确的测量数据处理 和分析方法。
大地测量新技术的研发与应用
卫星导航定位技术
随着卫星导航定位技术的不断发展,其在大地测量中的应用越来 越广泛,提高了测量精度和效率。
大地测量坐标系
地理坐标系
地理坐标系是以地球表面上的点位地理位置(经度和纬度)为定义的坐标系,通 常以度为单位。地理坐标系是大地测量的基础,用于描述地球表面上的点位位置 。
大地测量坐标系
大地测量坐标系是以地球椭球上的点位位置(经度、纬度和高程)为定义的坐标 系,用于描述地球椭球上点位的大地测量参数。
回归分析
精密三角高程测量

武汉大学测绘学院
潘正风
常规高程测量方法
几何水准测量目前仍是高程测量的主要方法, 测量精度高、操作简单是这种方法的优势。但视 线短、速度慢、劳动强度大。三角高程测量的精 度主要受高度角观测精度的限制和大气折光的影 响,限制了三角高程测量的应用。但可在较长的 距离上测量。因此,测量人员一直在研究,提高 三角高程测量的精度,在一定的精度范围内,代 替几何水准测量。
同理
短距离双向三角高程计算公式
长距离三角高程测量计算公式
点P1 观测目标P2 ,相对于 参考椭球面的大地高为h1 和 h2 , Z为大地天顶距。视线两 端点在椭球上的投影以m 和 n 表示。椭球中心 O,旋转轴 通 过极P 。b 椭球法线端点在旋 转轴上的位置以 n1和n2 表示, 而mP 和nP 是子午线。
• 在测段水准点附近(一般在20米以内,并要 求起、末点大致相等)架设全站仪,在水准 点上架设棱镜杆(起、末点为同一根杆,长 度不变),进行距离和高度角观测。 • 低棱镜两测回,高棱镜两测回。 • 观测时各站上要在观测前测定温度和气压, 在全站仪上设置,以便对边长进行改正。
观 测
观 测
观 测
大瑶山三角高程观测路线
精密三角高程测量的发展
随着全站仪的发展,国内外广泛开展了 EDM
三角高程测量的研究,并取得很大的进展。这 些研究表明,三角高程测量可以代替四等水准 测量,也有的认为边 EDM 三角高程测量已接 近或已达到二等水准测量要求,也有的认为 EDM 三角高程测量可以达到更高的精度。
短距离单向三角高程计算公式
大瑶山三角高程观测路线
大瑶山三角高程观测路线
对向观测方法
• 按仪器前进方向,先进行后测站观测,再 进行前测站观测。每个测段进行单棱镜往 返测或高低双棱镜观测,高低双棱镜观测 顺序为:后低,前低,前高,后高。支线 测段进行单棱镜往返测。一条边观测结束 后,进行下条边观测,这时特别要注意, 前站仪器不动,为下条边的后站,原后仪 器迁至前面,为下条边的前站,在一个测 段上对向观测的边为偶数条边。
武汉大学测绘学院CPII复测和CPIII测量方案

CPII、二等水准测量复测和CPIII测量(石武线十九局管段,线路长约50Km)一、作业依据1.《客运专线无碴轨道铁路工程测量暂行规定》(铁建设〔2006〕189号);2.《国家一、二等水准测量规范》(GB/T12897-2006);3.《全世界定位系统(GPS)铁路测量规程》(TB10054-97);4.“石武铁路客运专线(河南段)CPIII轨道控制网测量技术方案”(京广铁路客运专线河南有限责任公司,2009年9月,郑州)。
二、坐标与高程系统⑴平面坐标系统采用中铁三院、中铁四院提交的精测网功效的工程独立坐标系统。
参考椭球体采用WGS-84坐标系椭球体参数。
⑵高程系统采用1985国家高程基准,已知高程采用中铁三院、中铁四院提交的二等水准点高程。
三、作业人员组织和测量仪器⑴按作业量和进度,开始进入一个GPS平面测量增强组(8人)、二个水准测量组(8人)和一个精密三角高程测量组(4人),进行CPII、二等水准复测和加密和地面至桥面的高程引测。
⑵按工程进度,每次最多进入3个CPIII平面测量组(12人)和二个CPIII水准测量组(8人)。
⑶按测量内容和测量进度,前后采用8台静态双频GPS接收机、2台电子水准仪(0.3mm/Km)和2~3台1秒级智能全站仪作业。
四、CPII、二等水准测量复测这里所进行的CPII、二等水准测量复测,是指对设计院在第一次成立CPIII之前,进行CPII、二等水准测量复测功效的复测。
如CPII、二等水准控制点不能知足CPIII测量要求时,还需加密CPII 平面测量控制点和二等水准高程控制点。
CPII复测和加密采用GPS测量,按“客运专线无砟轨道铁路工程测量暂行规定”C级测量要求作业。
测量按边连接扩展,每次采用8台双频GPS接收机同步观测一个时段≥60分钟。
GPS同步观测图形如下。
8台GPS同步观测二等水准复测采用几何水准测量,按“国家一、二等水准测量规范”和“客运专线无砟轨道铁路工程测量暂行规定”测量要求作业。
水准测量实验及精度分析
水准测量实验及精度分析摘要:随着科技的进步和社会经济建设的发展,测绘工作的应用范围越来越广泛。
一般测绘工作包括平面控制测量和高程控制测量,水准测量是一种常用的高程测量方法。
水准测量分为四个等级,其中一等、二等水准测量称为精密水准测量。
精密水准测量的测量精度高,操作方便,因此使用范围十分广泛,无论是建立国家现代基准测绘体系还是工程建设的施工和维护都离不开精密水准测量。
但是精密水准测量容易受仪器自身或外界环境的影响产生误差,因此对测量环境的要求很严格。
如果水准测量的观测结果精度不达标,就只能重新进行观测,测量的效率会下降,因此在测量过程中应尽量避开会造成误差的因素,这就要求测量人员必须熟悉精密水准测量的原理、测量方法、测量规范和精度分析的方法,否则,对精密水准测量的精度和测量效率都会产生不利影响。
本文介绍了水准测量的原理及使用数字水准仪进行水准测量测量的内业、外业工作和操作规范,以一次在华南农业大学进行二等水准测量实验为例,探究影响精密水准测量精度的因素,并对这次的水准测量实验数据进行精度分析。
关键词:水准测量精度分析误差分析1绪论现在精密水准测量基本都是用数字水准仪配合条码水准尺来进行观测,数字水准仪可以通过传感器自动识别条码尺的条码分划从而实现自动读数[1]。
自动读数意味着可以不受人工读数误差的影响,这样观测出来的数据更加客观准确,读数完毕后,数字水准仪会自动储存数据,不需要人工记录数据,相比光学水准仪更加省时省力,测量效率和测量精度都可以提高不少[2]。
数字水准仪不仅可以自动读数,还可以自动处理及检核数据,有助于实现水准测量内外业一体化。
它会自动计算所测的高差、视距、视距差、视距差累积、视距累积、高差或高程累积差等,如果视距差和视距累积差超限了,水准仪会做出警告,观测者就可以调整测站。
测量完毕后可以在电脑上导出水准测量记录手簿。
但是用数字水准仪进行精密水准测量在测量的过程中,对外界环境的要求比较严格,很容易受到外界因素影响从而出现误差,这些误差有可能很难消除或削弱。
武大大地测量试题

武汉大学2003年攻读硕士学位研究生入学考试试题一.大地测量学基础名词解释(每小题4.5分)1.大地线克莱劳定理2.垂线偏差改正3.正常重力位4.正常高5.底点纬度6.投影长度比7.周期误差8.大地原地9.参心空间直角坐标系10.基辅差二.画图(15分)试分别画出1980年国家大地坐标系和WGS-84世界大地坐标系的示意图,并说明各轴的指向。
三.计算(18分)二等水准测量中,AB点间共设了4个测站点,A点的高程为h A=10.0000m,现用N3水准仪进行返测,前三站的高差和为5.0000m,第四站的观测数据如下(按观测顺序排列):1825 1385 16032 17427 1962 1523 47582 46188试计算该测站的视距长度和B点的高程h B。
四.证明题(18分)已知椭球面上一点的大地纬度为B、归化纬度为U、地心纬度为Φ,试证明:B>U>Φ五.问答题(本题共3小题,共54分)1.试述高斯投影的三个条件极其推导高斯投影坐标正算公式中的作用。
2.已知A点的大地坐标和B点的高斯平面坐标,试述下面问题的解题思路:(1)如何求得椭球面上A、B两点的大地线长?(2)如何求得A点至B点的平面坐标方位角?3.简述大地测量学的定义极其作用。
武汉大学2004年攻读硕士学位研究生入学考试试题大地测量学基础一.名词解释(每小题4分)1.大地水准面2.高斯投影正算3.大地高4.垂线偏差5.大地主题反算6.参考椭球定位7.找准目标的相位差8.波道曲率改正9.静力法重力测量10.恒星时二.填空(每小题3分)1.我国1954年北京坐标系是采用球参数。
2.已知P点的大地坐标为B=30°22',L=114°20',则P点位于6°投影带的号带。
3.当大地纬度B= 时,子午曲率半径M等于平均曲率半径。
4.水平角观测时,必须用盘左、盘右取平均值作为最后观测值,这样可以消除和误差的影响。
武汉大学 工程测量

工程测量第一章绪论1.工程测量学:是研究各种工程在规划设计、施工建设和运营管理阶段所进行的各种测量工作的学科。
2.工程测量学的内容:①工程测量中的地形图测绘②工程控制网布设及优化设计③施工放样技术和方法④工程的变形监测分析和预报⑤工程测量的通用和专用仪器⑥工程测量学中的误差及测量平差理论第二章工程建设中的测量工作与信息管理1.(简答)按工程建设的程序可划分为:(1)工程建设规划设计阶段(亦称勘测设计阶段)的测量工作内容:任何一项工程都必须按照自然条件和预期目的进行选址和勘测设计。
主要工作是提供各种比例尺的地形图供设计人员进行设计(城市规划主要采用1:2000地形图)(2)工程建设施工阶段的测量工作内容:按设计要求将设计的建(构)筑物位置、形状、大小及高程在实地标定出来,以便进行施工测量工作(施工控制网的建立和施工放样);工程质量的监理测量工作。
()(3)工程建设运营管理阶段的测量工作内容:工程建筑物变形观测,即定期对建筑物的位移、沉降、倾斜以及摇摆等进行观测。
2.(简答)线路勘测设计阶段的内容:⑴初测(初步设计)是对方案研究中认为有价值的几条线路或一条主要线路,结合现场的实际情况,在实地进行选点、插旗、标出线路方向。
内容:选点、插旗、标出线路方向、点位平面控制测量和水准测量,测出各点的平面位置和高程。
⑵定测(施工设计)是对已批准的初步设计所选定的线路方案,利用带状地形图上初测导线和纸上线路的几何关系,将选定的线路测设到实地上去。
内容:中线测量、曲线测设、纵横断面测量及局部地形图测绘,并为施工设计收集资料。
(初步设计为1:2000比例尺地形图;施工设计为1:1000比例尺的地形图)3.工程建设中的测量信息管理(信息传输、信息加工、信息存储)采集方法:测量仪器采集、通过数字化仪自动或手动扫描采集、用摄影测量方法获取影像。
信息分类方法:线分类法、面分类法。
信息编码分类:顺序码、位别码、表意码、合成码。
武汉大学大地测量学PPT课件
第6页/共95页
国家平面大地控制网
• 甚长基线干涉测量系统(VLBI)
甚长基线干涉测量系统(VLBI)是在甚长基线 的两端(相距几千公里),用射电望远镜,接收 银河系或银河系以外的类星体发出的无线电辐射 信号,通过信号对比,根据干涉原理,直接测定 基线长度和方向的一种空间技术。
长度的相对精度10-6,可达0.001″,由于其
9
第9页/共95页
国家平面大地控制网
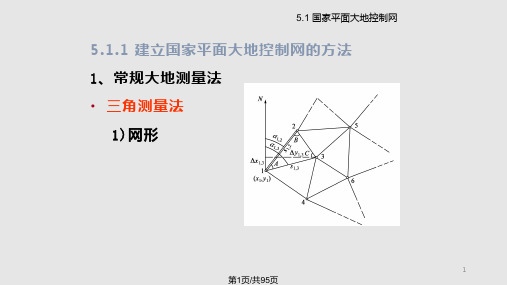
5.1.3 国家平面大地控制网的布设方案 1、 常规大地测量方法布设国家三角网 1)一等三角锁系布设方案
10
第10页/共95页
2)二等三角锁、网布设方案
国家平面大地控制网
11
第11页/共95页
3)三、四等三角网
国家平面大地控制网
插网法
12
第12页/共95页
插点法
16
第16页/共95页
国家平面大地控制网
3)国家高精度GPS B级网
全网由818个点组成,分布全国各地(除台湾省外)。 东部点位较密,平均站间50~70km,中部地区平均站 间100km,西部地区平均站间距150km。外业自1991 年至1995年结束,主要使用Ashtech MD 12和Trimble 4000 SSE仪器观测。经数据精处理后,点位中误差相 对于已知点在水平方向优于,高程方向优于,平均点 位中误差水平方向为,垂直方向为,基线相对精度达 到10-7
缺点:导线结构简单,没有三角网那样多的检核条件,不易发现粗差,可 靠性不高。
3
第3页/共95页
国家平面大地控制网
• 三边测量及边角同测法 边角全测网的精度最高,相应工作量也
较大。在建立高精度的专用控制网(如精密的 形变监测网)或不能选择良好布设图形的地区 可采用此法而获得较高的精度。
工程测量(武汉大学工程测量教案)-GPS精密单点定位技术软件及应用

R0i = ( X si − X 0 ) 2 + (Ysi − Y0 )2 + ( Z si − Z 0 ) 2
Z si − Z 0 X si − X 0 Ysi − Y0 令:l i = ;m i = ;n i = R0i R0i R0i
P i = R0i − l i dX − mi dY − n i dZ + δatmos i + δdt − δdT i
作三个球面 三个球面两两相交于两点 测站位于其中一点
测绘学院卫星应用工程研究所
测绘信息网网友提供
GPS单点定位的几何原理
测绘信息网网友提供
GPS单点定位方法的实质是空间距离后方交会
一个站星距离 = 球面 两个站星距离 = 圆 三个站星距离 = 两点 三个站星距离 + 地球 = 一点
测绘学院卫星应用工程研究所
测绘学院卫星应用工程研究所
GNSS全球导航卫星系统
卫星定位系统的三大部分
空间飞行的 GPS 卫星
Galileo星座 测绘学院卫星应用工程研究所 测绘信息网网友提供
测绘学院卫星应用工程研究所
测绘信息网网友提供
GPS单点定位基本概念
GPS单点定位 GPS单点定位通常是指 利用GPS直接确定观测 站在WGS-84坐标系中 的绝对坐标的一种定位 方法,单点定位也叫绝 对定位。
测绘学院卫星应用工程研究所
i = 1,2,3,4
1 ⎡ P1 ⎤ ⎡ R0 ⎤ ⎡l1 ⎢ 2⎥ ⎢ 2⎥ ⎢ 2 ⎢P ⎥ = ⎢R0 ⎥ − ⎢l 3 ⎢ P3 ⎥ ⎢ R0 ⎥ ⎢l 3 ⎢ 4⎥ ⎢ 4⎥ ⎢ 4 ⎣P ⎦ ⎣R0 ⎦ ⎣l
m1 n1 − 1⎤ ⎡dX ⎤ ⎡δdT1 ⎤ ⎡δatmos1 ⎤ ⎥ ⎢dY ⎥ ⎢ 2 2 2⎥ ⎢ 2⎥ m n − 1⎥ ⎢ ⎥ ⎢δdT ⎥ ⎢δatmos ⎥ + − 3 3 3 m n − 1⎥ ⎢ dZ ⎥ ⎢δdT ⎥ ⎢δatmos3 ⎥ ⎥⎢ ⎥ ⎢ 4 4 4⎥ ⎢ 4⎥ m n − 1⎦ ⎣δdt⎦ ⎣δdT ⎦ ⎣δatmos ⎦
武汉大学培养方案 测绘学院
测绘学院School of Geodesy and Geomatics测绘学院是我国测绘教育事业的著名学府,源于1956年的武汉测量制图学院,她以当时的同济大学、天津大学、南京工学院、华南工学院、青岛工学院等几所高校测绘专业的师资和设备为基础组建,隶属国家教育部,并于1958年划归国家测绘局管理,易名为武汉测绘学院;1978年,武汉测绘学院被批准为全国重点大学,1980年成为国务院批准的首批具有硕士、博士学位授予权的单位之一,1985年10月,学校更名为武汉测绘科技大学,1993年12月,武汉测绘科技大学原大地测量系与工程测量系合并组建了地学测量工程学院,2000年8月,在国家教育部的支持下,武汉测绘科技大学与当时的武汉大学、武汉水利电力大学、湖北医科大学合并,成立了新的武汉大学。
在新的武汉大学建制下,在原武汉测绘科技大学地学测量工程学院的基础上组建了武汉大学测绘学院。
学院下设测量工程系、卫星应用工程系、地球物理系,是全国高等学校测绘学科教学指导委员会主任单位,现有测绘工程和地球物理两个本科专业,具有测绘科学与技术一级学科博士点、地球物理学一级学科博士点,并设有博士后科研流动站。
学院现有大地测量与测量工程(国家重点学科)硕士及博士授权点、固体地球物理学(省重点学科)硕士及博士授权点。
学院拥有三个部级重点实验室:地球空间环境与大地测量教育部重点实验室、精密工程测量与测量机器人国家测绘局重点实验室、极地测绘科学国家测绘局重点实验室,以及武汉大学灾害监测与防治研究中心、国际全球导航卫星服务系统(IGS)永久性卫星跟踪站、GPS 差分基准站等,学院教学、科研设备齐全,有充足的高端GPS接收机、各种类型的全站仪、三维激光扫描仪、数字水准仪、影像处理软硬件、地球物理实验仪器等。
学院内设五个研究所:航天航空测绘研究所、空间信息工程研究所、测量工程研究所、地球物理大地测量研究所、卫星应用工程研究所,设有为本科教学服务的测绘实验中心、地球物理实验室和多个为科研服务的专业实验室。
8第八讲+水准仪的检验与校正

3.7水准测量误差的主要来源
——水准管气泡居中的误差
m居中
符合水准器:
0.1
''
S
: 水准管分划值 S : 距离 : 206265
'' ''
m居中
0.1 2
''
S
(表示每弧度对应的秒)
3.7水准测量误差的主要来源
——在水准尺上估读误差 1mm宽度在明视距离25cm内估读0.1mm可以得到保 证,在50m远1cm宽人眼构成的角度,经水准仪望远 镜放大成像后,在人眼明视距离范围上为1mm宽度。 在水准测量中,限制视距长度。
3.7水准测量误差的主要来源
——水准尺零点误差
前、后两水准尺的零点不一致。如由于尺子的 磨损等原因,可以采用高程点之间测量偶数站 的方法。
四、望远镜的视准轴与水准管的水
准轴平行的检验与校正
第一种检验i角的方法
' ' S A SB
' SB
' SA
A
'' SA
B
'' SB
'' ' hAB hAB i '' '' ' ' (S A S B ) (S A S B )
'' h AB h AB i '' '' S A SB
往返观测取平均可减小尺子的升沉误差
3.7水准测量误差的主要来源
——大气折光的影响
在晴天,地面温 度高,空气的密 度较上面的稀, 光线向上折射。
武汉大学测量平差课件01

绪 论
袁修孝
教授
武汉大学
遥感信息工程学院
主要内容
一、摄影测量学的定义与任务
二、摄影测量学的发展历程 三、本课程的主要内容
§1.1 摄影测量学的定义与任务
定义 分类 平台 特点 任务
A(X、Y、Z)
Z
Y
1
2
2 X
O
1
通过摄影,进行测量
遥感影像
地形图
传统摄影测量学定义
北京城市景观(亚运村)
摄影测量:分类
按距离远近
航天摄影测量 航空摄影测量 地面摄影测量 近景摄影测量 显微摄影测量 地 形摄影测量 非地形摄影测量 模拟摄影测量 解析摄影测量 数字摄影测量
按 用
途
按处理手段
摄影测量与遥感:平台
遥感平台 航天飞机 无线电探空仪 超高度喷气机 中低高度飞机 飞艇 高度 240~350km 100m~100km 10000~12000m 500~8000m 500~3000m 目的、用途 不定期地球观测、空间实验 各种调查(气象等) 侦察、大范围调查 各种调查、航空摄影测量 空中侦察、各种调查 其它
第一次世界大战期间,首台航摄仪的问世、立体坐标量测仪和 1318 立体测图仪的使用,真正开始了摄影测量学
摄影测量学的三个发展阶段
模拟摄影测量(1851-1970)
解析摄影测量(1950-1980)
数字摄影测量(1970-现在)
模拟摄影测量
利用光学/机械投影方法实现摄影过程的反转,用两个/多个投 影器模拟摄影机摄影时的位置和姿态构成与实际地形表面成比 例的几何模型,通过对该模型的量测得到地形图和各种专题图
摄影测量学是利用光学摄影机获取的 像片,经过处理以获取被摄物体的形 状、大小、位置、特性及其相互关系 的一门学科
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字测图原理及方法
3.4 水准测量
水准路线的形式 1、单一水准路线:附合水准路线:支水准路线、闭合水准路线
A
1
附合水准路线 2
3
2
2
A A
1
B
闭合水准路线
1 支水准路线
3
数字测图原理及方法
3.4 水准测量
2、水准网:由若干条单一水准路线相互连接成网状的形式。
C
3.4 水准测量
数字测图原理及方法
3.4 水准测量
城市高程系统的选择 ——《城市测量规范》规定一个城市只应采用一个 统 一的高程系统。 ——城市高程系统应采用1985国家高程基准或沿用 1956年黄海高程系统, ——在远离国家水准点的新设城市或在改造旧有水 准网因高程变动而影响使用时,经上级行政主 管部门批准后,可暂时建立或用地方高程系 统,但应争取条件归算到1985国家高程基准上 来。
数字测图原的等级
一、二等水准测量——科学研究、提供高程起算数据 三、四等水准测量——工程建设、提供高程起算数据 等外水准测量(普通水准、图根水准测量)——工程建设、 测图等。 精度由高到低
数字测图原理及方法
3.4 水准测量
编写水准测量技术设计书 1、收集资料:已有的小比例尺地形图、测区已有 的水准测量资料(水准点的高程、精度、高程系统、 施测单位、施测日期) 2、图上选点: 3、实地踏勘:修改点位 4、确定水准点的位置——埋石
(18)
(14)
1571 1197 37.4 -0.2
1
0739 后 0363 前 37.6 后-前 -0.2
+0832.5
数字测图原理及方法
3.5 三、四等 水准测量
三、四等水准测量的观测手簿:
测 站 编 号
后 下丝 尺 上丝 后距 视距差d (1) (2) (12) 前 下丝 尺 上丝 前距 d (5) (6) (13) (15) 方向 即尺 号 后 前 后- 前 标尺读数 黑面 (3) (4) (16) 1934 2008 -0074 红面 (8) (7) (17) 6621 6796 -0175 K+黑 减红 (10) (9) (11) 0 -1 +1 高 差 中 数
数字测图原理及方法
Principle and Methods of Digital Mapping
武汉大学测绘学院
第三章 高程测量
3.1水准测量的原理 3.2 水准仪等级及型号 3.3 水准仪的使用 3.4 水准测量 3.5 三、四等 水准测量 3.6 水准仪的检验与校正 3.7水准测量误差的主要来源
(18)
(14)
2121 1747 37.4 -0.1
2
2196 后 1821 前 37.5 后-前 -0.3
-0074.5
数字测图原理及方法
3.5 三、四等 水准测量
三、四等水准测量的观测手簿:
测 站 编 号
后 下丝 尺 上丝 后距 视距差d (1) (2) (12) 前 下丝 尺 上丝 前距 d (5) (6) (13) (15) 方向 即尺 号 后 前 后- 前 标尺读数 黑面 (3) (4) (16) 1726 1866 -0140 红面 (8) (7) (17) 6513 6554 -0041 K+黑 减红 (10) (9) (11) 0 -1 +1 高 差 中 数
D
A
1
2
3 B
E
4
数字测图原理及方法
3.5 三、四等 水准测量
数字测图原理及方法
3.5 三、四等 水准测量
1、三、四等 水准测量的观 测程序 施测方向
后 视 尺
前 视 尺
1、照准后视尺黑面,读取下、上、中丝读数 2、照准前视尺黑面,读取中、下、上丝读数 3、照准前视尺红面,读取中丝读数 4、照准后视尺红面,读取中丝读数
三、四等水准测量观测程序为:后、前、前、后 (黑、黑、红、红)
数字测图原理及方法
3.5 三、四等 水准测量
三、四等水准测量的观测限差:
等 级
仪 器 类 型
距后 差前 视
累后 计前 视 距 差
数黑 差红 面 读
高黑 差红 之面 差所 测
高检 差查 之间 差歇 点
(mm)
(mm)
(m)
(m)
(mm)
三等
数字测图原理及方法
3.4 水准测量
数字测图原理及方法
3.4 水准测量
水准测量的主要目的是测出一系列水准点的高 程。通过水准点的高程,可以了解地表的形状、地 壳的变化,以及指导工程的设计、施工、监测。 水准测量必须有统一的高程系。
数字测图原理及方法
3.4 水准测量
我国有两个国家高程系统
(1) 1956年黄海高程系(Huanghai height system 1956) ——以青岛验潮站历年观测的黄海平均海水面为基准面, ——于1954年在青岛市观象山建立了水准原点(leveling origin),通过水 准测量的方法将验潮站确定的高程零点引测到水准原点,也即求出水 准原点的高程。 ——1956年我国采用青岛验潮站1950年~1956年7年的潮汐记录资料推算 出的大地水准面为基准引测出水准原点的高程为72.289m, ——以这个大地水准面为高程基准建立的高程系称为“1956年黄海高程 系”(Huanghai height system 1956),简称“56黄海系”。 如珠穆琅玛峰的高程为8848.65m,是56黄海系。
数字测图原理及方法
3.4 水准测量
(2) “1985国家高程基准”
(Chinese height datum 1985) ——80年代,我国又采用青岛验潮站1953年~1977年25年 的潮汐记录资料推算出的大地水准面为基准引测出水 准 原点的高程为72.260m, ——以这个大地水准面为高程基准建立的高程系称为 “1985 国家高程基准”(Chinese height datum 1985),简称 “85高程基准”。 ——在水准原点,85高程基准使用的大地水准面比56黄海 系使用的大地水准面高出0.029m。 数字测图原理及方法
四等
S3
S3
65 85
3.0 5.0
6.0
2.0
3.0 5.0
3.0 5.0
10.0 3.0
数字测图原理及方法
3.5 三、四等 水准测量
三、四等水准测量的观测手簿:
测 站 编 号
后 下丝 尺 上丝 后距 视距差d (1) (2) (12) 前 下丝 尺 上丝 前距 d (5) (6) (13) (15) 方向 即尺 号 后 前 后- 前 标尺读数 黑面 (3) (4) (16) 1384 0551 +0833 红面 (8) (7) (17) 6171 5239 +0932 K+黑 减红 (10) (9) (11) 0 -1 +1 高 差 中 数