modeling homework using matlab
matlab数学建模方法与应用

matlab数学建模方法与应用Mathematical modeling is a powerful tool used in various fields such as engineering, physics, biology, economics, and many others. It involves the process of creating a mathematical representation of a real-world system or phenomenon. This allows us to better understand and analyze the system, make predictions, and even optimize its behavior. 数学建模是在工程、物理、生物学、经济学等各个领域中使用的一种强大工具。
它涉及创建对现实世界系统或现象的数学表示的过程。
这使我们能够更好地理解和分析系统,作出预测,甚至优化其行为。
One of the most common techniques used in mathematical modeling is differential equations. These equations describe the rate of change of a quantity with respect to another quantity. They are widely used to model various phenomena such as population growth, chemical reactions, and the behavior of physical systems. Differential equations can be solved using a variety of analytical and numerical methods, allowing us to study the behavior of the system over time. 在数学建模中使用的最常见技术之一是微分方程。
MATLAB编程基础入门教程
MATLAB编程基础入门教程Chapter 1: Introduction to MATLAB ProgrammingMATLAB is a widely used programming language and environment that is specifically designed for numerical computing. In this chapter, we will provide a comprehensive introduction to MATLAB programming and its fundamental concepts.1.1 MATLAB EnvironmentMATLAB provides an interactive environment where users can write and execute their programs. It offers a user-friendly interface that includes a command window, an editor, and a workspace. The command window allows users to execute commands directly and see the output instantly. The editor is used to write and save MATLAB programs, while the workspace displays the variables and their values.1.2 Variables and Data TypesIn MATLAB, variables are used to store data. They can be assigned values of different data types, including numeric data types such as integers, floating-point numbers, and complex numbers. MATLAB also supports character and string data types. Understanding data types is crucial for performing accurate calculations and data manipulations.1.3 Basic OperationsMATLAB supports a wide range of arithmetic and logical operations. Users can perform basic operations such as addition,subtraction, multiplication, and division on both scalars and arrays. MATLAB also provides functions for more complex mathematical operations such as exponentiation, logarithm, and trigonometric functions.1.4 Control Flow StatementsControl flow statements allow users to control the flow of program execution. MATLAB supports various control flow statements, including if-else statements, for loops, while loops, and switch statements. These statements enable users to write programs that can make decisions or repeat steps based on certain conditions.Chapter 2: MATLAB Programming TechniquesIn this chapter, we will delve deeper into MATLAB programming techniques that will enhance the efficiency and readability of your code.2.1 Functions and ScriptsFunctions and scripts are two fundamental components of MATLAB programming. Functions are reusable pieces of code that accept inputs and produce outputs. They allow for modular and organized programming. Scripts, on the other hand, are collections of code that execute in a specific order. They are useful for automating a series of commands or calculations.2.2 File I/O OperationsMATLAB provides functions to read and write data from and to different file formats. These file I/O operations are crucial for data analysis and processing tasks. MATLAB supports file formats such as text files, spreadsheets, images, and audio files. Understanding how to efficiently read and write data from different file formats will greatly enhance your data processing capabilities.2.3 Error HandlingError handling is an essential aspect of programming. MATLAB provides mechanisms to catch and handle errors that may occur during program execution. By implementing proper error handling techniques, you can make your code more robust and prevent unexpected crashes or undesired outcomes.2.4 Debugging and ProfilingDebugging is the process of identifying and fixing errors or bugs in your code. MATLAB provides debugging tools that allow you to step through your code, set breakpoints, and inspect variables. Profiling, on the other hand, helps identify code bottlenecks and optimize the performance of your programs. Profiling tools provide insights into the execution time and memory usage of different parts of your code.Chapter 3: MATLAB Graphics and VisualizationMATLAB offers powerful tools for creating highly visual and interactive graphics. In this chapter, we will explore MATLAB'sgraphics capabilities and techniques for creating professional-quality visualizations.3.1 Basic PlottingMATLAB provides functions for creating basic 2D and 3D plots. Users can plot data points, lines, surfaces, and volumes. They can also customize the appearance of plots by changing colors, line styles, and markers. Understanding how to create and customize basic plots will enable you to effectively visualize your data.3.2 Advanced Plotting TechniquesMATLAB's advanced plotting techniques allow users to create more complex visualizations. These techniques include plotting multiple data sets on the same graph, adding legends and labels, creating subplots, and customizing axes properties. By mastering these techniques, you can generate informative and aesthetically pleasing visualizations.3.3 Animation and Interactive GraphicsMATLAB provides tools for creating animations and interactive graphics. Animation allows you to visualize changes in data over time. Interactive graphics enable users to interact with plots by zooming, panning, or selecting data points. Understanding how to create animations and interactive graphics will enhance the engagement and effectiveness of your visualizations.Chapter 4: MATLAB Applications and ExtensionsMATLAB offers a wide range of toolboxes and extensions that extend its functionality and allow users to solve specific technical problems. In this chapter, we will explore some popular MATLAB toolboxes and their applications.4.1 Signal Processing ToolboxThe Signal Processing Toolbox provides functions for analyzing and processing signals. It offers tools for filtering, spectral analysis, time-frequency analysis, and wavelet analysis. This toolbox is widely used in fields such as telecommunications, audio processing, and biomedical engineering.4.2 Image Processing ToolboxThe Image Processing Toolbox is designed for image analysis and manipulation tasks. It offers functions for image enhancement, segmentation, morphological operations, and spatial transformations. This toolbox finds applications in fields such as medical imaging, computer vision, and remote sensing.4.3 Control System ToolboxThe Control System Toolbox provides tools for analyzing and designing control systems. It offers functions for modeling, simulation, and control system design. This toolbox is valuable for engineers working in fields such as robotics, aerospace, and industrial automation.4.4 Machine Learning ToolboxThe Machine Learning Toolbox enables users to implement various machine learning algorithms. It provides functions for classification, regression, clustering, and dimensionality reduction. This toolbox is widely used in data analysis, pattern recognition, and predictive modeling.Conclusion:MATLAB is a powerful and versatile programming language for numerical computing. In this tutorial, we have covered the essential concepts and techniques required for getting started with MATLAB programming. By mastering these foundation skills, you can explore more advanced topics and unlock the full potential of MATLAB as a tool for technical computation and data visualization.。
matlab实训心得体会
matlab实训心得体会matlab实训心得体会1作为一名即将毕业踏入社会的大学生,这次实习就像是上台前的最后一次彩排,当我走进公司时那种激动而又紧张的心情不言而喻。
生怕会在工作中出现差错,然而现在看来所有在实习中出现的困难,都是一笔珍贵的财富,警示着我在今后的工作中做得更好。
一、实习过程开始实习之前,我多少有些心虚。
因为我的许多朋友都有过假期打工的经历。
而作为一名化工专业的学生,这次的实习却是我的第一次工作经历。
从工作那天开始,我过着与以往完全不一样的生活,每天在规定的时间上下班,上班期间要认真准时地完成自己的工作任务,不能草率敷衍了事,我们肩上扛着的责任,不再只是对自己了,而是对一个公司,所以凡是都要小心谨慎。
学校换成了公司,同学换成了同事,不再有自由支配的时间,一切来得那么无情,但是去必须适应。
其实我的工作就是、收发信函、报价、传真和邮件、绘制表格等。
每天重复着这些烦琐的工作,时间久了容易厌倦,但是工作烦琐也不能马虎,一个小小的错误不但会给自己带来麻烦,更会给公司带来巨大的损失,而像公司的业务员每天都得到处奔波,他们必须具备坚韧不拔的个性,遭遇挫折时绝不能就此放弃,犯错时遭到领导责骂还不能赌气就此辞职,每次看到他们我就会充满干劲。
踏上了社会我们开始与形形色色的人打交道,由于存在着利益关系,很多时刻同事不会像同学一样嘘寒问暖,有时候我会很矫情的想起安妮宝贝说过的,纯粹的东西总是死的很快,而现在所能做的,只有在怀念中适应变化的一切。
二、实习感悟“在大学里学的不是知识而是一种叫自学的能力。
”当我真正走上工作岗位时才深刻的体会到这句话的含义,除了化工和计算机操作外,课本上学的理论用的很少,我担任的助理一职平时做些接待客户、处理文件,我必须工作中勤于动手,不断学习新知识积累经验,没有自学能力的人迟早会被企业和社会淘汰。
我最大的感悟就是真诚所至,金石为开。
不管多难做,做好自己的那一份,总有一天会有收获,只是时间的问题。
Matlab的第三方工具箱大全
Matlab的第三方工具箱大全(按住CTRL点击连接就可以到达每个工具箱的主页面来下载了)Matlab Toolboxes∙ADCPtools - acoustic doppler current profiler data processing∙AFDesign - designing analog and digital filters∙AIRES - automatic integration of reusable embedded software∙Air-Sea - air-sea flux estimates in oceanography∙Animation - developing scientific animations∙ARfit - estimation of parameters and eigenmodes of multivariate autoregressive methods∙ARMASA - power spectrum estimation∙AR-Toolkit - computer vision tracking∙Auditory - auditory models∙b4m - interval arithmetic∙Bayes Net - inference and learning for directed graphical models∙Binaural Modeling - calculating binaural cross-correlograms of sound∙Bode Step - design of control systems with maximized feedback∙Bootstrap - for resampling, hypothesis testing and confidence interval estimation ∙BrainStorm - MEG and EEG data visualization and processing∙BSTEX - equation viewer∙CALFEM - interactive program for teaching the finite element method∙Calibr - for calibrating CCD cameras∙Camera Calibration∙Captain - non-stationary time series analysis and forecasting∙CHMMBOX - for coupled hidden Markov modeling using max imum likelihood EM ∙Classification - supervised and unsupervised classification algorithms∙CLOSID∙Cluster - for analysis of Gaussian mixture models for data set clustering∙Clustering - cluster analysis∙ClusterPack - cluster analysis∙COLEA - speech analysis∙CompEcon - solving problems in economics and finance∙Complex - for estimating temporal and spatial signal complexities∙Computational Statistics∙Coral - seismic waveform analysis∙DACE - kriging approximations to computer models∙DAIHM - data assimilation in hydrological and hydrodynamic models∙Data Visualization∙DBT - radar array processing∙DDE-BIFTOOL - bifurcation analysis of delay differential equations∙Denoise - for removing noise from signals∙DiffMan - solv ing differential equations on manifolds∙Dimensional Analysis -∙DIPimage - scientific image processing∙Direct - Laplace transform inversion via the direct integration method∙DirectSD - analysis and design of computer controlled systems with process-oriented models∙DMsuite - differentiation matrix suite∙DMTTEQ - design and test time domain equalizer design methods∙DrawFilt - drawing digital and analog filters∙DSFWAV - spline interpolation with Dean wave solutions∙DWT - discrete wavelet transforms∙EasyKrig∙Econometrics∙EEGLAB∙EigTool - graphical tool for nonsymmetric eigenproblems∙EMSC - separating light scattering and absorbance by extended multiplicative signal correction∙Engineering Vibration∙FastICA - fixed-point algorithm for ICA and projection pursuit∙FDC - flight dynamics and control∙FDtools - fractional delay filter design∙FlexICA - for independent components analysis∙FMBPC - fuzzy model-based predictive control∙ForWaRD - Fourier-wavelet regularized deconvolution∙FracLab - fractal analysis for signal processing∙FSBOX - stepwise forward and backward selection of features using linear regression∙GABLE - geometric algebra tutorial∙GAOT - genetic algorithm optimization∙Garch - estimating and diagnosing heteroskedasticity in time series models∙GCE Data - managing, analyzing and displaying data and metadata stored using the GCE data structure specification∙GCSV - growing cell structure visualization∙GEMANOVA - fitting multilinear ANOVA models∙Genetic Algorithm∙Geodetic - geodetic calculations∙GHSOM - growing hierarchical self-organizing map∙glmlab - general linear models∙GPIB - wrapper for GPIB library from National Instrument∙GTM - generative topographic mapping, a model for density modeling and data visualization∙GVF - gradient vector flow for finding 3-D object boundaries∙HFRadarmap - converts HF radar data from radial current vectors to total vectors ∙HFRC - importing, processing and manipulating HF radar data∙Hilbert - Hilbert transform by the rational eigenfunction expansion method∙HMM - hidden Markov models∙HMMBOX - for hidden Markov modeling using maximum likelihood EM∙HUTear - auditory modeling∙ICALAB - signal and image processing using ICA and higher order statistics∙Imputation - analysis of incomplete datasets∙IPEM - perception based musical analysisJMatLink - Matlab Java classesKalman - Bayesian Kalman filterKalman Filter - filtering, smoothing and parameter estimation (using EM) for linear dynamical systemsKALMTOOL - state estimation of nonlinear systemsKautz - Kautz filter designKrigingLDestimate - estimation of scaling exponentsLDPC - low density parity check codesLISQ - wavelet lifting scheme on quincunx gridsLKER - Laguerre kernel estimation toolLMAM-OLMAM - Levenberg Marquardt with Adaptive Momentum algorithm for training feedforward neural networksLow-Field NMR - for exponential fitting, phase correction of quadrature data and slicing LPSVM - Newton method for LP support vector machine for machine learning problems LSDPTOOL - robust control system design using the loop shaping design procedure LS-SVMlabLSVM - Lagrangian support vector machine for machine learning problemsLyngby - functional neuroimagingMARBOX - for multivariate autogressive modeling and cross-spectral estimation MatArray - analysis of microarray dataMatrix Computation- constructing test matrices, computing matrix factorizations, visualizing matrices, and direct search optimizationMCAT - Monte Carlo analysisMDP - Markov decision processesMESHPART - graph and mesh partioning methodsMILES - maximum likelihood fitting using ordinary least squares algorithmsMIMO - multidimensional code synthesisMissing - functions for handling missing data valuesM_Map - geographic mapping toolsMODCONS - multi-objective control system designMOEA - multi-objective evolutionary algorithmsMS - estimation of multiscaling exponentsMultiblock - analysis and regression on several data blocks simultaneously Multiscale Shape AnalysisMusic Analysis - feature extraction from raw audio signals for content-based music retrievalMWM - multifractal wavelet modelNetCDFNetlab - neural network algorithmsNiDAQ - data acquisition using the NiDAQ libraryNEDM - nonlinear economic dynamic modelsNMM - numerical methods in Matlab textNNCTRL - design and simulation of control systems based on neural networks NNSYSID - neural net based identification of nonlinear dynamic systemsNSVM - newton support vector machine for solv ing machine learning problems NURBS - non-uniform rational B-splinesN-way - analysis of multiway data with multilinear modelsOpenFEM - finite element developmentPCNN - pulse coupled neural networksPeruna - signal processing and analysisPhiVis- probabilistic hierarchical interactive visualization, i.e. functions for visual analysis of multivariate continuous dataPlanar Manipulator - simulation of n-DOF planar manipulatorsPRT ools - pattern recognitionpsignifit - testing hyptheses about psychometric functionsPSVM - proximal support vector machine for solving machine learning problems Psychophysics - vision researchPyrTools - multi-scale image processingRBF - radial basis function neural networksRBN - simulation of synchronous and asynchronous random boolean networks ReBEL - sigma-point Kalman filtersRegression - basic multivariate data analysis and regressionRegularization ToolsRegularization Tools XPRestore ToolsRobot - robotics functions, e.g. kinematics, dynamics and trajectory generation Robust Calibration - robust calibration in statsRRMT - rainfall-runoff modellingSAM - structure and motionSchwarz-Christoffel - computation of conformal maps to polygonally bounded regions SDH - smoothed data histogramSeaGrid - orthogonal grid makerSEA-MAT - oceanographic analysisSLS - sparse least squaresSolvOpt - solver for local optimization problemsSOM - self-organizing mapSOSTOOLS - solving sums of squares (SOS) optimization problemsSpatial and Geometric AnalysisSpatial RegressionSpatial StatisticsSpectral MethodsSPM - statistical parametric mappingSSVM - smooth support vector machine for solving machine learning problems STATBAG - for linear regression, feature selection, generation of data, and significance testingStatBox - statistical routinesStatistical Pattern Recognition - pattern recognition methodsStixbox - statisticsSVM - implements support vector machinesSVM ClassifierSymbolic Robot DynamicsTEMPLAR - wavelet-based template learning and pattern classificationTextClust - model-based document clusteringTextureSynth - analyzing and synthesizing visual texturesTfMin - continous 3-D minimum time orbit transfer around EarthTime-Frequency - analyzing non-stationary signals using time-frequency distributions Tree-Ring - tasks in tree-ring analysisTSA - uni- and multivariate, stationary and non-stationary time series analysisTSTOOL - nonlinear time series analysisT_Tide - harmonic analysis of tidesUTVtools - computing and modifying rank-revealing URV and UTV decompositions Uvi_Wave - wavelet analysisvarimax - orthogonal rotation of EOFsVBHMM - variation Bayesian hidden Markov modelsVBMFA - variational Bayesian mixtures of factor analyzersVMT- VRML Molecule Toolbox, for animating results from molecular dynamics experimentsVOICEBOXVRMLplot - generates interactive VRML 2.0 graphs and animationsVSVtools - computing and modifying symmetric rank-revealing decompositions WAFO - wave analysis for fatique and oceanographyWarpTB - frequency-warped signal processingWAVEKIT - wavelet analysisWaveLab - wavelet analysisWeeks - Laplace transform inversion via the Weeks methodWetCDF - NetCDF interfaceWHMT - wavelet-domain hidden Markov tree modelsWInHD - Wavelet-based inverse halftoning via deconvolutionWSCT - weighted sequences clustering toolkitXMLTree - XML parserYAADA - analyze single particle mass spectrum dataZMAP - quantitative seismicity analysis。
用MATLAB的时重要MATLAB tools
用MATLAB的时重要MATLAB toolsADCPtools - acoustic doppler current profiler data processingAFDesign - designing analog and digital filtersAIRES - automatic integration of reusable embedded softwareAir-Sea - air-sea flux estimates in oceanographyAnimation - developing scientific animationsARfit - estimation of parameters and eigenmodes of multivariate autoregressive methodsARMASA - power spectrum estimationAR-Toolkit - computer vision trackingAuditory - auditory modelsb4m - interval arithmeticBayes Net - inference and learning for directed graphical modelsBinaural Modeling - calculating binaural cross-correlograms of soundBode Step - design of control systems with maximized feedbackBootstrap - for resampling, hypothesis testing and confidence interval estimationBrainStorm - MEG and EEG data visualization and processingBSTEX - equation viewerCALFEM - interactive program for teaching the finite element methodCalibr - for calibrating CCD camerasCamera CalibrationCaptain - non-stationary time series analysis and forecastingCHMMBOX - for coupled hidden Markov modeling using maximum likelihood EM Classification - supervised and unsupervised classification algorithmsCLOSIDCluster - for analysis of Gaussian mixture models for data set clusteringClustering - cluster analysisClusterPack - cluster analysisCOLEA - speech analysisCompEcon - solving problems in economics and financeComplex - for estimating temporal and spatial signal complexitiesComputational StatisticsCoral - seismic waveform analysisDACE - kriging approximations to computer modelsDAIHM - data assimilation in hydrological and hydrodynamic modelsData VisualizationDBT - radar array processingDDE-BIFTOOL - bifurcation analysis of delay differential equationsDenoise - for removing noise from signalsDiffMan - solving differential equations on manifoldsDimensional Analysis -DIPimage - scientific image processingDirect - Laplace transform inversion via the direct integration methodDirectSD - analysis and design of computer controlled systems with process-oriented modelsDMsuite - differentiation matrix suiteDMTTEQ - design and test time domain equalizer design methodsDrawFilt - drawing digital and analog filtersDSFWAV - spline interpolation with Dean wave solutionsDWT - discrete wavelet transformsEasyKrigEconometricsEEGLABEigTool - graphical tool for nonsymmetric eigenproblemsEMSC - separating light scattering and absorbance by extended multiplicative signal correctionEngineering VibrationFastICA - fixed-point algorithm for ICA and projection pursuitFDC - flight dynamics and controlFDtools - fractional delay filter designFlexICA - for independent components analysisFMBPC - fuzzy model-based predictive controlForWaRD - Fourier-wavelet regularized deconvolutionFracLab - fractal analysis for signal processingFSBOX - stepwise forward and backward selection of features using linear regressionGABLE - geometric algebra tutorialGAOT - genetic algorithm optimizationGarch - estimating and diagnosing heteroskedasticity in time series modelsGCE Data - managing, analyzing and displaying data and metadata stored using the GCE data structure specificationGCSV - growing cell structure visualizationGEMANOVA - fitting multilinear ANOVA modelsGenetic AlgorithmGeodetic - geodetic calculationsGHSOM - growing hierarchical self-organizing mapglmlab - general linear modelsGPIB - wrapper for GPIB library from National InstrumentGTM - generative topographic mapping, a model for density modeling and data visualizationGVF - gradient vector flow for finding 3-D object boundariesHFRadarmap - converts HF radar data from radial current vectors to total vectorsHFRC - importing, processing and manipulating HF radar dataHilbert - Hilbert transform by the rational eigenfunction expansion methodHMM - hidden Markov modelsHMMBOX - for hidden Markov modeling using maximum likelihood EMHUTear - auditory modelingICALAB - signal and image processing using ICA and higher order statisticsImputation - analysis of incomplete datasetsIPEM - perception based musical analysisJMatLink - Matlab Java classesKalman - Bayesian Kalman filterKalman Filter - filtering, smoothing and parameter estimation (using EM) for linear dynamical systemsKALMTOOL - state estimation of nonlinear systemsKautz - Kautz filter designKrigingLDestimate - estimation of scaling exponentsLDPC - low density parity check codesLISQ - wavelet lifting scheme on quincunx gridsLKER - Laguerre kernel estimation toolLMAM-OLMAM - Levenberg Marquardt with Adaptive Momentum algorithm for training feedforward neural networksLow-Field NMR - for exponential fitting, phase correction of quadrature data and slicingLPSVM - Newton method for LP support vector machine for machine learning problemsLSDPTOOL - robust control system design using the loop shaping design procedure LS-SVMlabLSVM - Lagrangian support vector machine for machine learning problemsLyngby - functional neuroimagingMARBOX - for multivariate autogressive modeling and cross-spectral estimationMatArray - analysis of microarray dataMatrix Computation - constructing test matrices, computing matrix factorizations, visualizing matrices, and direct search optimizationMCAT - Monte Carlo analysisMDP - Markov decision processesMESHPART - graph and mesh partioning methodsMILES - maximum likelihood fitting using ordinary least squares algorithmsMIMO - multidimensional code synthesisMissing - functions for handling missing data valuesM_Map - geographic mapping toolsMODCONS - multi-objective control system designMOEA - multi-objective evolutionary algorithmsMS - estimation of multiscaling exponentsMultiblock - analysis and regression on several data blocks simultaneouslyMultiscale Shape AnalysisMusic Analysis - feature extraction from raw audio signals for content-based music retrievalMWM - multifractal wavelet modelNetCDFNetlab - neural network algorithmsNiDAQ - data acquisition using the NiDAQ libraryNEDM - nonlinear economic dynamic modelsNMM - numerical methods in Matlab textNNCTRL - design and simulation of control systems based on neural networksNNSYSID - neural net based identification of nonlinear dynamic systemsNSVM - newton support vector machine for solving machine learning problemsNURBS - non-uniform rational B-splinesN-way - analysis of multiway data with multilinear modelsOpenFEM - finite element developmentPCNN - pulse coupled neural networksPeruna - signal processing and analysisPhiVis - probabilistic hierarchical interactive visualization, i.e. functions for visual analysis of multivariate continuous dataPlanar Manipulator - simulation of n-DOF planar manipulatorsPRTools - pattern recognitionpsignifit - testing hyptheses about psychometric functionsPSVM - proximal support vector machine for solving machine learning problemsPsychophysics - vision researchPyrTools - multi-scale image processingRBF - radial basis function neural networksRBN - simulation of synchronous and asynchronous random boolean networksReBEL - sigma-point Kalman filtersRegression - basic multivariate data analysis and regressionRegularization ToolsRegularization Tools XPRestore ToolsRobot - robotics functions, e.g. kinematics, dynamics and trajectory generationRobust Calibration - robust calibration in statsRRMT - rainfall-runoff modellingSAM - structure and motionSchwarz-Christoffel - computation of conformal maps to polygonally bounded regions SDH - smoothed data histogramSeaGrid - orthogonal grid makerSEA-MAT - oceanographic analysisSLS - sparse least squaresSolvOpt - solver for local optimization problemsSOM - self-organizing mapSOSTOOLS - solving sums of squares (SOS) optimization problemsSpatial and Geometric AnalysisSpatial RegressionSpatial StatisticsSpectral MethodsSPM - statistical parametric mappingSSVM - smooth support vector machine for solving machine learning problemsSTATBAG - for linear regression, feature selection, generation of data, and significance testingStatBox - statistical routinesStatistical Pattern Recognition - pattern recognition methodsStixbox - statisticsSVM - implements support vector machinesSVM ClassifierSymbolic Robot DynamicsTEMPLAR - wavelet-based template learning and pattern classificationTextClust - model-based document clusteringTextureSynth - analyzing and synthesizing visual texturesTfMin - continous 3-D minimum time orbit transfer around EarthTime-Frequency - analyzing non-stationary signals using time-frequency distributions Tree-Ring - tasks in tree-ring analysisTSA - uni- and multivariate, stationary and non-stationary time series analysisTSTOOL - nonlinear time series analysisT_Tide - harmonic analysis of tidesUTVtools - computing and modifying rank-revealing URV and UTV decompositions Uvi_Wave - wavelet analysisvarimax - orthogonal rotation of EOFsVBHMM - variation Bayesian hidden Markov modelsVBMFA - variational Bayesian mixtures of factor analyzersVMT - VRML Molecule Toolbox, for animating results from molecular dynamics experimentsVOICEBOXVRMLplot - generates interactive VRML 2.0 graphs and animationsVSVtools - computing and modifying symmetric rank-revealing decompositionsWAFO - wave analysis for fatique and oceanographyWarpTB - frequency-warped signal processingWAVEKIT - wavelet analysisWaveLab - wavelet analysisWeeks - Laplace transform inversion via the Weeks methodWetCDF - NetCDF interfaceWHMT - wavelet-domain hidden Markov tree modelsWInHD - Wavelet-based inverse halftoning via deconvolutionWSCT - weighted sequences clustering toolkitXMLTree - XML parserYAADA - analyze single particle mass spectrum dataZMAP - quantitative seismicity analysis。
Homework-01
《图像处理技术在纺织中的应用》作业一
- 1 - 作业一
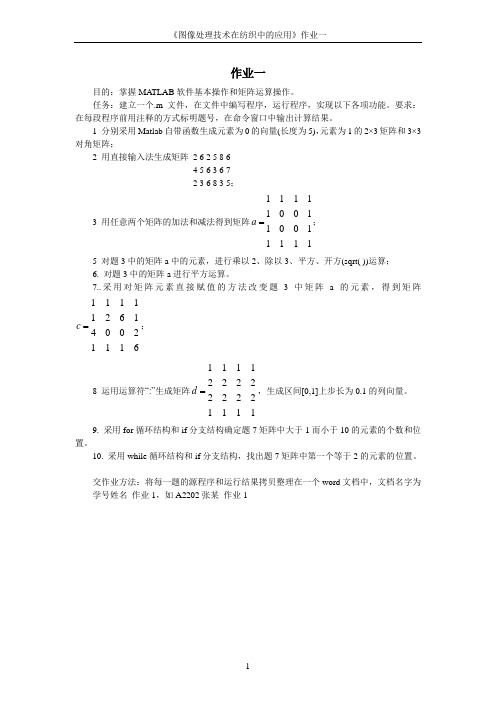
目的:掌握MA TLAB 软件基本操作和矩阵运算操作。
任务:建立一个.m 文件,在文件中编写程序,运行程序,实现以下各项功能。
要求:在每段程序前用注释的方式标明题号,在命令窗口中输出计算结果。
1 分别采用Matlab 自带函数生成元素为0的向量(长度为5),元素为1的2×3矩阵和3×3对角矩阵;
2 用直接输入法生成矩阵 2 6 2 5 8 6
4 5 6 3 6 7
2 3 6 8 3 5;
3 用任意两个矩阵的加法和减法得到矩阵1111
1001
1001
1111a =;
5 对题3中的矩阵a 中的元素,进行乘以2、除以3、平方、开方(sqrt( ))运算;
6. 对题3中的矩阵a 进行平方运算。
7..采用对矩阵元素直接赋值的方法改变题3中矩阵a 的元素,得到矩阵1111
1261
4002
1116
c =; 8 运用运算符“:”生成矩阵1111
22222222
1111
d =,生成区间[0,1]上步长为0.1的列向量。
9. 采用for 循环结构和if 分支结构确定题7矩阵中大于1而小于10的元素的个数和位置。
10. 采用while 循环结构和if 分支结构,找出题7矩阵中第一个等于2的元素的位置。
交作业方法:将每一题的源程序和运行结果拷贝整理在一个word 文档中,文档名字为 学号姓名 作业1,如A2202张某 作业1。
麻省理工大学matlab homework
Jan. 26, 2010 Homework 2 6.094: Introduction to MatlabHomework 2This homework is designed to give you practice with writing functions and visualizing data. This assignment will give you more freedom than Homework 1 to choose how you implement your functions. You will just be graded on whether your functions produce the correct output, but not necessarily on how efficiently they’re written. As before, the names of helpful functions are provided in bold where needed. Homework must be submitted before the start of the next class.What to turn in: Copy the text from your scripts and paste it into a document. If a question asks you to plot or display something to the screen, also include the plot and screen output your code generates. Submit either a *.doc or *.pdf file.Keep all your code in scripts. If a specific name is not mentioned in the problem statement, you can choose your own script names.1. Semilog plot. Over the past 5 years, the number of students in 6.094 has been 15, 25, 55, 115,144. Class size seems like it’s growing exponentially. To verify this, plot these values on a plot with a log y scale and label it (semilogy, xlabel, ylabel, title). Use magenta square symbols of marker size 10 and line width 4, and no line connecting them. You may have to change the x limits to see all 5 symbols (xlim). If the relationship really is exponential, it will look linear on a log plot.1Problem 2 removed due to copyright restrictions.3. Bar graph. Make a vector of 5 random values and plot them on a bar graph using red bars,something like the figure below.24. Interpolation and surface plots. Write a script called randomSurface.m to do the followinga. To make a random surface, make Z0 a 5x5 matrix of random values on the range [0,1](rand).b. Make an X0 and Y0 using meshgrid and the vector 1:5 (use the same vector for bothinputs into meshgrid). Now, X0, Y0, and Z0 define 25 points on a surface.c. We are going to interpolate intermediate values to make the surface seem smooth.Make X1 and Y1 using meshgrid and the vector 1:.1:5 (again use the same vector forboth inputs into meshgrid).d. Make Z1 by interpolating X0, Y0, and Z0 at the positions in X1 and Y1 using cubicinterpolation (interp2, specify cubic as the interpolation method).e. Plot a surface plot of Z1. Set the colormap to hsv and the shading property to interp(surf, colormap, shading).f. Hold on to the axes and plot the 15-line contour on the same axes (contour).g. Add a colorbar (colorbar).h. Set the color axis to be from 0 to 1 (caxis). The final figure should look something likethis (if the figure isn’t copy/pasting into your document appropriately, try changing thefigure copy options to use a bitmap):5. Fun with find. Write a function to return the index of the value that is nearest to a desiredvalue. The function declaration should be: ind=findNearest(x, desiredVal). x is a vector or matrix of values, and desiredVal is the scalar value you want to find. Do not assume that desiredVal exists in x, rather find the value that is closest to desiredVal. If multiple values are the same distance from desiredVal, return all of their indices. Test your function to make sure it works on a few vectors and matrices. Useful functions are abs, min, and find. Hint: You may have some trouble using min when x is a matrix. To convert a matrix Q intoa vector you can do something like y=Q(:). Then, doing m=min(y) will give you theminimum value in Q. To find where this minimum occurs in Q, do inds=find(Q==m);.36. Loops and flow control . Make function called loopTest(N)that loops through the values 1 through N and for each number n it should display ‘n is divisible by 2’, ‘n is divisible by 3’, ‘n is divisible by 2 AND 3’ or ‘n is NOT divisible by 2 or 3’. Use a for loop, the function mod or rem to figure out if a number is divisible by 2 or 3, and num2str to convert each number to a string for displaying. You can use any combination of if , else , and elseif .7. Smoothing filter. Although it is a really useful function, Matlab does not contain an easy to usesmoothing filter. Write a function with the declaration: smoothed=rectFilt(x,width). The filter should take a vector of noisy data (x ) and smooth it by doing a symmetric moving average with a window of the specified width . For example if width=5, then smoothed(n) should equal mean(x(n-2:n+2)). Note that you may have problems around the edges: when n<3and n>length(x)-2.a. The lengths of x and smoothed should be equal.b. For symmetry to work, make sure that width is odd. If it isn’t, increase it by 1 to makeit odd and display a warning, but still do the smoothing.c. Make sure you correct edge effects so that the smoothed function doesn’t deviate fromthe original at the start or the end. Also make sure you don’t have any horizontal offsetbetween the smoothed function and the original (since we’re using a symmetric movingaverage, the smoothed values should lie on top of the original data).d. You can do this using a loop and mean (which should be easy but may be slow), or moreefficiently by using conv (if you are familiar with convolution).e. Load the mat file called noisyData.mat. It contains a variable x which is a noisy line. Plotthe noisy data as well as your smoothed version, like below (a width of 11 was used):D a t a V a l u e Smoothing IllustrationIndex 4Optional Problems8. Optional: Plot a circle. It’s not immediately obvious how to plot a circle in Matlab. Write thefunction [x,y]=getCircle(center,r) to get the x and y coordinates of a circle. The circle should be centered at center (2-element vector containing the x and y values of the center) and have radius r. Return x and y such that plot(x,y)will plot the circle.x (t )= cos (t )a. Recall that for a circle at the origin (0,0), the following is true: , for t onsin ty t () = () the range [0, 2π] . Now, you just have to figure out how to scale and translate it.b. Write a script called concentric.m. In this script, open a new figure and plot fivecircles, all centered at the origin and with increasing radii. Set the line width for eachcircle to something thick (at least 2 points), and use the colors from a 5-color jetcolormap (jet). The property names for line width and color are ‘LineWidth’ and‘Color’, respectively. Other useful function calls are hold on and axis equal. It shouldlook something like thisc. Make a script called olympic.m. This script should use your getCircle function todraw the Olympic logo, as shown below. Don’t worry about making the circles overlap inthe same way as the official logo (it’s possible but is too complicated for now). Also,when specifying colors, you can use the same color codes as when plotting lines (‘b’ for5blue, ‘k’ for black, etc.) instead of providing an RGB vector.69. Optional: Functions . If you wrote the ball throwing script for Homework 1, turn it into afunction. Add a function declaration that takes v and theta as inputs and returns the distance at which the ball hits the ground: distance=throwBall(v,theta). We generally don’t want functions to plot things every time they run, so remove the figure command and any plotting commands from the function. To be able to simulate a wide range of v and theta, make the time go until 10sec and add an if statement that will display the warning ‘The ball does not hit the ground in 10 seconds’ if that turns out to be the case. Also, if the ball doesn’t hit the ground in 10 seconds, you should return NaN as the distance . To test your function, write a script testBall.m to throw the ball with the same velocity v but different angles and plot the distance as a function of angle theta . The plot should look something like the figure below. You will need to run throwBall within a loop in order to calculate the distances for various thetas .Distance of ball throw as a function of release angle D i s t a n c e t h r o w n (m )Initial Angle (deg) 710. Optional: Smoothing nonuniformly sampled data. Modify your smoothing filter above to alsoworks on data that isn’t sampled at a constant rate. Modify the program to also accept x if it is an Nx2 matrix, where the first column is the x values and the second column is the y values of the data points (such that doing plot(x(:,1),x(:,2),’.’) would plot the data). In this case, width should be on the same scale as the scale of the x values, so for example if the x(:,1) values are on the range [0,1], a width of 0.2 is acceptable. Also, in this case the width doesn’t have to be odd as before. Assume that the x values are in increasing order. The output should also be an Nx2 matrix, where the first column is the same as the first column in x , and the second column contains the smoothed values. The most efficient way to do this is unclear; you may find the interpolating function interp1 helpful, but you can definitely do this without using it. The file optionalData.mat contains a matrix x that you can test your function on. When smoothed with a width of 2, you should get a result like:Smoothing Illustration, nonuniform spacingY V a l u e X Value 811. Optional: Buy and sell a stock. Write the following function:endValue=tradeStock(initialInvestment, price, buy, sell)The weekly price of Google stock from 8/23/2004 until 1/11/2010 is saved in the file googlePrices.mat. This file also contains two other vectors: peaks and lows. The peaks vector contains indices into the price vector when the stock peaked, and the lows vector contains indices into the price vector when the stock hit a low. Run your program so that it buys stock when it’s low, and sell it when it’s high. Below is a list of specifications.a. The inputs are: initialInvestment – the amount of money you have to invest atthe beginning, in dollars; price – a vector of stock prices over time; buy – a vector oftimes when to buy (should just be integers that index into the price vector); sell – avector of times when to sell (similar to the buy vector). endValue is the end value ofyour investment. If all of your stock isn’t sold at the end, use the last price of the stockto calculate how much it’s worth and add it to your available cash. Make the functiongeneral so that it will work with any given price, buy and sell vectors.b. You can only buy integer numbers of shares of stock (you can’t buy 3.23 shares). Youalso can’t buy more stock than you can afford (if the current price is $100 and you have$599 in cash, you can only buy 5 shares). When deciding how much you can buy, factorin the transaction cost (see next section) so that you don’t go negative. When buying,always buy as many shares as you can, and when selling, sell all your shares.c. Each buy or sell transaction costs you $12.95, make sure you include this in yourprogram. If your initial investment is small, you may not be able to carry out all the buyand sell orders. It may also not make sense to sell at each specified time: for example ifyou bought 10 shares of stock and the price increases by $1, it doesn’t make sense tosell it since the transaction cost would eat up all your profit and cost you $2.95 extra.However you can’t make the decision of whether to buy or not since you don’t knowwhere the price is going to go (you can’t look forward in time). You don’t have to besuper clever about deciding whether to sell or not, but you can if you’re so inclined.d. After it’s complete, run your program with various initial investments. LoadgooglePrices.mat into your workspace and then run the function using the price,peaks, and lows vectors. To check that you did it right, try an initial investment of$100. This should give you an end value of $100. Also try an initial investment of$100000, which should result in a total value of about $61,231,407 (with a $100,000initial investment, it turns out that you don’t even have to decide whether it’s a goodidea to sell because the transaction cost becomes negligible compared to the number ofshares you have).9M IT OpenCourseWare6.094 Introduction to MATLAB®January (IAP) 2010For information about citing these materials or our Terms of Use, visit: /terms.。
PV模型

PV 组件的MATLAB 建模(A detailed modeling of photovoltaic module using MATLAB)摘要:PV 模块是将光转换为电能的接口。
此装置的建模必然要求以气象数据(辐照度和温度)作为输入变量。
输出变量可以是电流、电压、功率等等。
然而I(V)和P(V)的跟踪特性需要这三个变量。
任何输入的变化,必将引起输出的立刻改变。
这就是需要一个精确的PV 模块模型的重要原因。
本文提出了辐照度和温度对PV 模块参数影响的详细模型。
所选择的模型是更准确的串联和并联电阻单二极管模型。
详细的模型是:通过使用MATLAB/Simulink 软件按步骤仿真。
MA TLAB 是使用最频繁和最有效的工具之一。
1.引言所选择模型的等效电路变得更便捷和更贴近实际时,未知参数的数量也随之增加。
但大多数制造商的数据表不提供取决于天气条件(辐照度和温度)的参数的足够信息。
因此,为建立光伏电池和光伏模块的数学模型,对电池性能的物理性质的一些假设是必要的。
此外,使用这些信息是用于构造函数。
本文着重研究的是光伏模块或阵列作为复杂“电能量系统”的一个设备。
因此我们的目标是获取实时最大和最精确功率。
因此,此时的值最接近实验值。
I(V)特性是一个多参数的非线性方程,参数分类如下:一些是由构造函数提供,一些是常数,还有是需要计算得到的。
有些研究人员提出了简化方法,但是一些未知的参数不能计算(因此将它们假设为恒定值)。
例如,在2011年Walker 和Geoff 提出串联一个电阻RS ,但在中等复杂模型中,没有并联阻抗。
Benmessaoud 等人(2010)、Atlas 和Sharaf(1992)、Beckman 等人、Bryan(1999)、Bouzid 等人(2005)都采用相同的假设,即认为并联阻抗非常大(可忽略)。
有些学者同时忽略并联和串联电阻,因为并联阻抗非常大而串联阻抗非常小。
另一方面,有些文献认为PV 组件的这两个内部特征非常重要,且决定精度。
Matlab+homework+2

Matlab Worksheet 2Part A (In-class room exercises)ing plot to display the following voltage with appropriate line type, title and labels.Also present the graph with suitable ranges of axis.220sin)(=tvπ2ftwhere f=50 Hz.(Hint: time interval must be small enough, e.g. 0.001 seconds. Therefore, t=0:0.001:1 is appropriate);t=0:0.002:1;v=220*sin(2*pi*50*t);plot(t,v,'r','LineWidth',1);xlabel('time');ylabel('value');title('v(t)--t');axis([0 1 -250 250]);ing plot to display the following voltage with appropriate line type, title and labels.Also present the graph with suitable ranges of axis.ft e t v t π2sin 220)(5-=where f =50 Hz.In addition, on the same graph, draw the envelope of the oscillation and add legends. t=0:0.001:0.1;v=220*sin(2*pi*50*t);v1=220*exp(-5*t).*sin(2*pi*50*t); plot(t,v,'r','LineWidth',1); hold on;plot(t,v1,'b','LineWidth',2); xlabel('time'); ylabel('value'); title('v(t)--t');axis([0 0.1 -250 250]); hold off; grid on;3. Use subplot, draw a 2 by 2 array of plots for the following functions :te v t e v t e v t v t t t ππππ10cos 10cos 10cos ,10cos 204103521---====Apply appropriate line type, title, labels and axis ranges for the graphs. t=0:.01:1v1=cos(10*pi*t);v2=exp(-5*t).*cos(10*pi*t); v3=exp(-10*t).*cos(10*pi*t); v4=exp(-20*t).*cos(10*pi*t); subplot(2,2,1);plot(t,v1);xlabel('time');ylabel('value');title('v--t');axis([0 1 -1 1]);grid on;subplot(2,2,2);plot(t,v2);xlabel('time');ylabel('value');title('v--t');axis([0 1 -1 1]);grid on;subplot(2,2,3);plot(t,v3);xlabel('time');ylabel('value');title('v--t');axis([0 1 -1 1]);grid on;subplot(2,2,4);plot(t,v4);xlabel('time');ylabel('value');title('v--t');axis([0 1 -1 1]);grid on;e plot3 to plot 2 spiral curves like below with appropriate line width and colour.t=0:0.01:10;x=0.01*sin(2*pi.*t).*exp(0.6*t);y=0.01*cos(2*pi.*t).*exp(0.6*t);z=0.2*t;plot3(x,y,z,'g','LineWidth',3);axis([-4 4 -4 4 0 3]);grid on ;-44t=0:0.01:10;x=sin(2*pi.*t).*log(6*t); y=cos(2*pi.*t).*log(6*t); z=0.2*t;plot3(x,y,z,'g','LineWidth',3); axis([-4 4 -4 4 0 3]); grid on ;-445. Display the surface using mesh and contour with a suitable resolution:))50()50((005.022),(-+--=y x e y x z[x,y]=meshgrid(0:2:100,0:2:100); z=exp(-0.005*((x-50).^2+(y-50).^2)); figure(1); mesh(x,y,z), xlabel('x'); ylabel('y'); grid; figure(2); contour(x,y,z); xlabel('x');ylabel('y'); grid;100xyxy10203040506070809010001020304050607080901006. Load 2 of your photos into Matlab WorkSpace using imread . a) Change brightnesslocally or globally. b) Overlap them to produce a new photo. c) write a new photo into a file using imwrite . (Note: lower version of Matlab such as 6.5 is not allowed to do some direct image operations.) A):A=imread('Desert.jpg'); figure(1),imshow(A); size(A);figure(2),histeq(A(:,:,1)) imshow(A+100);imwrite(A+100,'ddd1.jpg');B):A=imread('Desert.jpg');B=imread('Penguins.jpg'); [M,N,L]=size(A);C(1:M,1:N,1:L)=B(1:M,1:N,1:L); figure(1);imshow(A);figure(2);imshow(C);figure(3);imshow(A+C);C):A=imread('Tulip.jpg');imwrite(A,'ttt.jpg');7. For linear simultaneous equationsMN MN M M N N N N b x a x a x a b x a x a x a b x a x a x a =+++=+++=+++.................. (2212)2222121112112111the equation coefficients:A=[ 1 -1 4 3-5 4 5 -60 7 -8 9-1 3 -2 6]; (M=N)a) Find the determinant of A,>> A=[1 -1 4 3;-5 4 5 -6;0 7 -8 9 ;-1 3 -2 6];>> det(A)ans =-765.0000b) Find the inverse of A and check for matrix singularity,>> inv(A)ans =0.3333 -0.0000 0.3333 -0.66670.2000 0.1176 0.2706 -0.38820.2000 0.0588 0.0353 -0.09410.0222 -0.0392 -0.0680 0.2183c) If B=[ 5; 1; -2; 3], find the unknown x in the equation.>> B=[5;1;-2;3];>> x=inv(A'*A)*A'*Bx =-1.0000-0.58820.70590.86278. For linear simultaneous equations,MN MN M M N N N N b x a x a x a b x a x a x a b x a x a x a =+++=+++=+++.................. (2212)2222121112112111M>N, the equation coefficients:A=[ 1 -1 4 3-5 4 5 -60 7 -8 9-1 3 -2 61 -2 5 30 4 7 -3];a) Find the determinant of A’*A,>> A=[1 -1 4 3;-5 4 5 -6;0 7 -8 9;-1 3 -2 6;1 -2 5 3;0 4 7 -3];>> det(A'*A)ans =2.1051e+007b) Fin d the inverse of A’*A and check for matrix singularity,>> inv(A'*A)ans =0.0884 0.0321 -0.0013 -0.02190.0321 0.0231 0.0002 -0.0099-0.0013 0.0002 0.0085 0.0053-0.0219 -0.0099 0.0053 0.0144c) If B=[ 5; 1; -2; 3; 4; 0], find the solution of the equation.>> B=[5;1;-2;3;4;0];>> x=inv(A'*A)*A'*Bx =-0.8903-0.48980.57550.70839. Data of 10 records are shown belowy=[3.5 4.3 3.7 5.4 6.6 7.3 8.7 8.8 9.4 9.0 10.0 12.0 11.3 9.9 13.3],Use polyfit with different orders (from 1 to 3) of polynomials to find a curve of best fit . Check the total distance between the fitted curve z and records defined by()2/12⎪⎪⎭⎫ ⎝⎛-=∑i i i y z s .x=0:14; y=[3.5 4.3 3.7 5.4 6.6 7.3 8.7 8.8 9.4 9.0 10.0 12.0 11.3 9.9 13.3];plot(x,y,'x');hold on ;p=polyfit(x,y,3);z=polyval(p,x);plot(x ,z ,'r', 'LineWidth', 2);hold off ;grid on ;024******** >> s=sqrt(sum((z-y).^2))s =3.039810.Create a set of 20 points from a curve by Matlab code:x=1:20;y=2*exp(-0.3*(x-5).^2)+0.7*exp(-0.2*(x-12).^2);Then interpolate the curve to 60 points using ‘linear’ and ‘spline’ options,respectively. See the quality of different types of interpolation.x=1:20;y=2*exp(-0.3*(x-5).^2)+0.7*exp(-0.2*(x-12).^2);xi = 0:.25:20;yi = interp1(x,y,xi,'linear');plot(x,y,'r*');hold on;plot(xi,yi,'o');plot(xi,yi,':');hold off ;grid on ;00.511.522.5x=1:20;y=2*exp(-0.3*(x-5).^2)+0.7*exp(-0.2*(x-12).^2);xi = 0:.25:20;yi = interp1(x,y,xi,'spline');plot(x,y,'r*');hold on ;plot(xi,yi,'o');plot(xi,yi,':');hold off ;02468101214161820Part Bing the plot and subplot functions create 4 plots on a 2 by 2 array of subplots,for the function exp(-t)sin(5t) showing in each plot the function in the corresponding intervals of t i.e. (-2, -1), (-1,0), (0,1) and (1,2).Answer:t=-2:.01:2;x=(exp(-t)).*sin(5.*t);%subplot(2,2,1);plot(t,x);axis([-2 -1 -5 5]);subplot(2,2,2);axis([-1 0 -5 5]);subplot(2,2,3);plot(t,x);axis([0 1 -5 5]);subplot(2,2,4);plot(t,x);axis([1 2 -5 5]);grid on ;-2-1.5-1-505-1-0.50-50500.51-5051 1.52-5052. A three phase induction motor characteristic is given in terms of mechanical shaft output torque M T (NM Newton-meter) as a function of rotational speed ω (rad/s radian per second). This is approximated by 3 piece-wise linear equations as follows:πωππωπωππωπωπω120110120010110905.42220959000.490≤≤+-=≤≤-=≤≤+=M M M T T T This motor is directly coupled to a loadL T , which can be represented asπωπωπω12041201001205023+⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛-=L TWrite 2 separate Matlab f unction m-files in which: a) the motor characteristic, b) the load characteristic are defined only as functions of ω. Name them motor.m and sysload.m, respectively.Answer:function TM=motor(w);for i=1:length(w);if w(i)>=0 & w(i)<=90*pi;TM(i)=w(i)/(90*pi)+4.0;elseif w(i)>=90 & w(i)<=110*pi;TM(i)=(95*w(i))/(20*pi)-422.5;elseif w(i)>=110*pi & w(i)<=120*pi;TM(i)=-10*w(i)/pi+1200;end;end;endfunction TL=sysload(w);%TL=-50*(w/(120*pi)).^3+100*(w/(120*pi)).^2+4*w/(120*pi);end3. Write a Matlab scripgt-m file which calls your function m-files from Question 2. And plot the motor and load characterstics on the same figure, giving suitable labelling and title. Name this script m-file systemplot.mAnswer:w=0:1:120*pi;TM=motor(w);TL=sysload(w);plot(w,TM,'r');hold on;plot(w,TL,'k');hold off;xlabel('rotational speed ω');ylabel('q');title('compare of TM & TL'); grid on;4. Write a sript m-file which finds all the mathematicall possible points (values of ω) whereL M T T = for the range 0≤ ω≤120π (rad/s) with the characteristic given in Question 2. The system could theoretically operate at a speed ω whereL M T T = Mathematically, this involves finding the roots of the equation0=-L M T TGive a name to this m-file posspoints.m . Call posspoints.m in systemplot.m and sh ow all of the points on a system plot using the ‘o’ symbol.Answer:Part CIntroduction to DSP1. Basic digital signals Unit impulse functionδ[]n n n =≠=⎧⎨⎩0010Exercise 1-1:Display the unit impulse function with Matlab code. The code can be either typed under Matlab prompt or written into a script Matlab file, then run the file. n=-10:10; for k=1:21 x(k)=0; end; x(11)=1; stem(n, x);axis([-10 10 0 2]);Problem 1-1:For the signal ]2[2+n δ, write the Matlab code and copy the result figure into the following boxes.Unit step functionu n n n []=<≥⎧⎨⎩0010Exercise 1-2:Display the unit step function with Matlab code:n=-10:10; for k=1:10 x(k)=0; end;for k=11:21 x(k)=1; end;stem(n, x);axis([-10 10 0 2]);Problem 1-2:For the signal ]2[--n u , write the Matlab code, and display the corresponding signal into theSine wave)sin(T n ωwhere ω - frequency (rad/second), T - sampling interval (seconds)Exercise 1-3:Let T=0.02, ω =6.28. Using the following code, plot on the screen in the region 0 ≤ n ≤100.n=0:100; T=0.02;omega=6.28;for k=1:101x(k)=sin((k-1)*omega*T); end;stem(n, x);Problem 1-3:Modify the above code to display the signal: )2sin(2πω+T n , where T=0.02, ω=6.28.Execute the code and plot the signal on the screen. Copy the code, then display the signalTime shift, impulse and step responsesExercise 1-4For the unit impulse,⎩⎨⎧≠==-00001][n n n n n n δand the unit step⎩⎨⎧<≥=-00001][n n n n n n uwrite two Matlab functions and save as ‘impseq.m’ and ‘stepseq.m’ files, respectively.% impseq.m %Unit Impulse%[n1:n2] simple number range %n0 - time shiftfunction [x, n]=impseq(n0,n1,n2) n=[n1:n2]; x=[(n-n0)==0]; %end;% stepseq.m % Unit Step%[n1:n2] simple number range %n0 - time shiftfunction [x, n]= stepseq(n0, n1, n2) n=[n1:n2]; x=[(n-n0)>=0]; %endGiven the following difference equation:][]2[9.0]1[7.0][n x n y n y n y =-+--a) Calculate and plot the impulse response at n=-20,…,120; andb) Calculate and plot the step response at n=-20,…,120, using the following codeb=[1]; a=[1,-0.7, 0.9];x=impseq(0,-20, 120); n=[-20:120]; h=filter(b,a,x);subplot(2,1,1);stem(n,h);title('Impulse response');xlabel('n');ylabel('h(n)');x=stepseq(0,-20, 120); n=[-20:120]; h=filter(b,a,x);subplot(2,1,2);stem(n,h);title('Step response');xlabel('n');ylabel('s(n)');Problem 1-4 Solve the above a) and b) for the system: ]1[2][]2[94.0]1[8.1][-+=-+--n x n x n y n y n yDisplay the responses in the boxes.2. ConvolutionIn the liner time-invariant (LTI) system, the response of the system can be calculated by a convolution between the input and its unit impulse response.Exercise 2-1 Write an Matlab function and save as ‘conv_m.m’.%convolution function%conv_m.mfunction [y, ny]=conv_m(x,nx,h,nh)nyb=nx(1)+nh(1);nye=nx(length(x))+nh(length(h));ny=[nyb:nye];y=conv(x,h);%end;Compute the convolution for x[n] and h[n] using the following codes:x=[3, 11, 7, 0, -1, 4, 2];nx=[-3:3];h=[2, 3, 0, -5, 2, 1];nh=[-1:4];[y, ny]=conv_m(x,nx,h,nh);Subplot(3,1,1);stem(nx,x);ylabel('x[n]');axis([-6 10 -20 20]);Subplot(3,1,2);stem(nh,h);ylabel('h[n]');axis([-6 10 -20 20]);subplot(3,1,3);stem(ny,y);xlabel('n');ylabel('y[n]');axis([-6 10 -50 50]);Problem 2-1 Compute a response of a system by convolution between an input signal x1[n] and the impulse response x2[n]. Display the signals and result into the following boxes using the code modified from the above:%*********************************%The input signalx=[1, 1, 1, 1, 1];% ^% The Impulse responseh=[1,0.5,0.25,0.125,0.0625,0.03125;% ^%Define the position on axisnx=[0:4];nh=[0:5];%*******************************3. Z-Transform and Frequency ResponseExercise 3-1A digital LTI system has z-transform 8.01)(-=z z H . Its frequency response can be obtained by letting z =exp(j Ω). ()8.0exp 1)(-Ω=Ωj HThe MATLAB code for plotting the magnitude and phase of the frequency response:delta=0.01;Omega=0:delta:pi;H= 1 ./ (exp(j .* Omega)-0.8); subplot(2,1,1);plot(Omega, abs(H)); xlabel('0<\Omega<\pi'); ylabel('|H(\Omega)|');axis([0 pi 0 max(abs(H))]); subplot(2,1,2);plot(Omega,atan2(imag(H),real(H))); xlabel('0<\Omega<\pi'); ylabel(' -\pi < \Phi_H <\pi') axis([0 pi -pi pi]);0<Ω<π|H (Ω)|0.511.522.530<Ω<π-π < ΦH <0The LTI system has a high gain in the range of low frequencies. Therefore, it is a low-pass filter.Problem 3-1 Generate Matlab code similar to Exercise 4-1, and sketch the magnitudeand phase for the frequency response of a filter: 922.036.1)(2+-=z z zz H .Indicate the type of filter and comment on the magnitude and phase in different frequency bands:Problem 3-2 Generate Matlab code similar to Exercise 4-1, and sketch the magnitudeIndicate the type of filter and comment on the magnitude and phase in different frequency bands:)922.036.1)(8.0()(224+-+-=z z z z z z H4. Spectral analysis by DFT and windowingDigital spectral analysis using DFT – the decomposition of a signal into its frequency components using a computer or spectral-purpose hardware- is a valuable technique in many branches of engineering, applied science and information technology. An FFT algorithm is the natural choice for this work because of its fast speed. The basic assumption behind the purpose of spectral analysis is that a frequency-domain description for the signal is likely to reveal important information which is not apparent in the time –domain. Note that spectral analysis, unlike digital filtering, is primarily investigative. It is not necessarily concerned with modifying the signal. Nevertheless, the information it yields often leads to important insights or decision making.4.1 Spectral leakageIf a component in a signal is not the harmonic of basic frequency, the discontinuity will occur between one basic sampling length and the next. The spectrum will not be represented by a single line but a peak with sidelobs.Problem 4-1Examine sinusoidal components in a signal by spectral analysis⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=10245.4222sin 15.010245.1072sin 2.01024322sin 1.0][n n n n x πππThe first component gives a single spectral coefficient. The second and the third components display sidelobes around a high coefficient, which represent the spectral leakage. Using the following code, plot the signal in time and frequency domains on the screen and sketch them into the box below.%Examine signal components %sampling rate 1024Hz N=1024; dt=1/N; t=0:dt:1-dt; %****define the signal** x=0.1*sin(2*pi*32 .*t ) + ... 0.2*sin(2*pi*107.5 .*t )+ ... 0.15*sin(2*pi* 422.5 .*t ) ; %*********************** subplot(2,1,1);plot(t,x);axis([0 1 -1 1]);xlabel('nT (seconds)');ylabel('x[n]');X=fft(x);df=1;f=0:df:N-1;subplot(2,1,2);plot(f,abs(X));axis([0 N/2 0 120]); xlabel('k (Hz)'); ylabel('|X[k]|');4.2 WindowingIn spectral analysis, only a signal component at an exact harmonic frequency of DFT gives rise to a single and well-defined spectral line. Unfortunately practical digital signals do not behave in this way. They normally contain a wide mixture of frequencies, few of them exact harmonics. This means that the spectral leakage is generally unavoidable, and it may lead to difficulties of interpretation. It is therefore common practice to taper the original signal before transformation, reducing discontinuities at its edges. This can be done by multiplying the signal with a suitable window function.Problem 4-2a) Use the following Matlab code to apply rectangular, triangular and Hamming window. Observe the level of magnitude and the distribution of side-lobs carefully to find any improvement of leakage reduction. Put the screen display below and make your comments about different level of leakages. Make sure the shape of the signal in the time domain is drawn according to the shape of window function.%Windowing for reducing leakage%sampling rate 1024HzN=1024; dt=1/N; t=0:dt:1-dt;%****define the signal**x=sin(2*pi*72 .*t )+...sin(2*pi*196.5 .*t )+...sin(2*pi*408 .*t );%***********************% Apply rectangular windowsubplot(3,2,1);plot(t,x);axis([0 1 -5 5]);xlabel('nT (seconds)');ylabel('x[n] rectang win');X=fft(x);df=1;f=0:df:N-1;subplot(3,2,2);plot(f,20*log10(abs(X)));axis([0 N/2 -30 60]);xlabel('k (Hz)');ylabel('|X[k]| (db)');% Apply triangular windowfor n=1:Nw(n)=1-abs(2*n-N+1)/N;end;x1=x .*w;subplot(3,2,3);plot(t,x1);axis([0 1 -5 5]);xlabel('nT (seconds)');ylabel('x[n] triang win');X=fft(x1);df=1;f=0:df:N-1;subplot(3,2,4);plot(f,20*log10(abs(X)));axis([0 N/2 -30 60]);xlabel('k (Hz)');ylabel('|X[k]| (db)');% Apply Hamming windowfor n=1:Nw(n)=0.54+0.46*cos((2*n-N+1)*pi/N);end ;x1=x .*w;subplot(3,2,5);plot(t,x1);axis([0 1 -5 5]);xlabel('nT (seconds)');ylabel('x[n] Hamming win');X=fft(x1);df=1;f=0:df:N-1;subplot(3,2,6);plot(f,20*log10(abs(X)));axis([0 N/2 -30 60]);xlabel('k (Hz)');ylabel('|X[k]| (db)');b)Use your code with Hamming window to analyse the signal:⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛⋅⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=10243.3652cos 10242.32sin 10245.1752cos 10246.522sin ][n n n n n x ππππPlot the graphic result with appropriate title and labels.00.10.20.30.40.50.60.70.80.91-505nT (seconds)x [n ] H a m m i n g w i n 050100150200250300350400450500-20204060k (Hz)|X [k ]| (d b )。
ch2.4 Modeling and Simulation using MATLAB-Simulink
Cleve Moler
In the late 1990s, MATLAB had been the standared computation software.
Jack Little
1. MATLAB
Versions MATLAB 1.0 MATALB 2 MATLAB 3 MATLAB 3.5 MATLAB 4 MATLAB 4.2c MATLAB 5.0 R7 R8
2.4.1 Introduction of MATLAB/Simulink
1. MATLAB
Development of MATLAB
In 1970s , Cleve Moler, the dean of department of computer science in University of New Mexico, developed the software MATLAB by FORTRAN language for reducing the burden on the students’ programming. In 1984, Jake Little, Cleve Moler and Steve Bangert cofounded the company of MathWorks.
matlab yalmip gurobi 编程指导 -回复

matlab yalmip gurobi 编程指导-回复Matlab, Yalmip, and Gurobi Programming Guidance: Step by StepIntroduction:In this article, we will provide a step-by-step guide to programming in MATLAB using the YALMIP modeling language and the Gurobi optimization solver. This comprehensive guide will cover essential aspects of the MATLAB environment, explain how to install and set up YALMIP and Gurobi, and provide examples to help you understand the process better.Section 1: MATLAB Basics (250 words)Matlab is a numerical programming language that offers a wide range of functions, comprehensive toolboxes, and an interactive environment for data analysis, modeling, and simulation. To get started, you need to have MATLAB installed on your computer. Once installed, launch MATLAB, and you will be greeted with the MATLAB Command Window.Section 2: Installing YALMIP (250 words)YALMIP is a MATLAB-based modeling language for optimization problems. It allows you to express optimization problems in anatural way using MATLAB syntax. To install YALMIP, follow these steps:1. Download the YALMIP package from the official website.2. Extract the contents of the downloaded file to a directory of your choice.3. Add the path to the extracted directory to MATLAB's search path using the "addpath" command.Section 3: Setting up Gurobi (250 words)Gurobi is one of the leading optimization solvers available, known for its efficiency in solving large-scale mathematical programming problems. Here's how you can set up Gurobi:1. Download and install the Gurobi Optimizer binary for your operating system from the official Gurobi website.2. Once installed, obtain a license by following the instructions provided.3. Set up the Gurobi MATLAB interface by running the"gurobi_setup.m" script provided with the Gurobi installation.Section 4: Using YALMIP and Gurobi (750 words)Now that you have MATLAB, YALMIP, and Gurobi installed and set up, let's dive into some examples of how you can use themtogether to solve optimization problems. We will demonstrate the process using a simple linear programming example.Step 1: Define the decision variables and objective function (150 words)Start by defining your decision variables using MATLAB syntax. For example, to define a scalar variable 'x', you can use the command "x = sdpvar(1,1);". Next, define your objective function using the decision variables. For instance, "Objective = 3*x + 2;".Step 2: Set up constraints (150 words)Define the constraints of your optimization problem using MATLAB syntax. For example, if you have the constraint "2*x <= 10", you can express it as "Constraint = x <= 5;".Step 3: Set up the optimization problem (150 words)Now that you have defined your decision variables, objective function, and constraints, you can set up the optimization problem using the YALMIP syntax. For example, "OptimizationProblem = optimize(Constraint, Objective);".Step 4: Solve the optimization problem using Gurobi (150 words)To solve the optimization problem, you need to call the Gurobi solver. Use the command "optimize(OptimizationProblem, [], options);" to solve the problem. Here, 'options' can be customized to modify the solver's behavior.Step 5: Retrieve and interpret the solution (150 words)After the optimization problem has been solved, you can retrieve and interpret the solution using MATLAB syntax. For example, use "value(x)" to retrieve the value of decision variable 'x'. You can also obtain the optimal objective value using "value(Objective)".Conclusion (100 words)In conclusion, MATLAB, YALMIP, and Gurobi provide a powerful and user-friendly environment for formulating and solving optimization problems. By following this step-by-step guide, you should now have a good understanding of how to set up and use these tools together to solve optimization problems in MATLAB. Remember to explore the extensive documentation available for MATLAB, YALMIP, and Gurobi to further enhance your programming skills in this domain. Happy coding!。
Matlab的第三方工具箱全套整合(强烈推荐)

Complex- for estimating temporal and spatial signal complexities
Computational Statistics
Coral- seismic waveform analysis
2007-8-2915:04
#1
littleboy
助理工程师
精华0
积分49
帖子76
水位164
技术分0
JMatLink- Matlab Java classes
Kalman- Bayesian Kalman filter
Kalman Filter- filtering, smoothing and parameter estimation (using EM) for linear dynamical systems
DMsuite- differentiation matrix suite
DMTTEQ- design and test time domain equalizer design methods
DrawFilt- drawing digitaland analog filters
DSFWAV- spline interpolation with Dean wave solutions
FSBOX- stepwise forward and backward selection of features using linear regression
GABLE- geometric algebra tutorial
GAOT- genetic algorithm optimization
1-Matlab基本介绍

文件名是要以字母开头中间不含空格和标点 符号的字符串;不能用汉字、数字和专用变量 名作为文件名,如1,11,pi,ans,eps等。
16
设置个性化路径
(1)程序通常保存在文件夹:\matlab\work中, 此为matlab的默认路径。 (2)程序若要放在其他路径中,则要添加该路径 到matlab的路径设置中,否则程序不能执行。
acot(x) log(x)
x的反正切 x的余切
x的反余切 x的自然对数
cos(x)
asin(x)
x的余弦
x的反正弦
log10(x)
sinh(x)
x的常用对数
双曲正弦
acos(x)
tan(x)
x的反余弦
x的正切
cosh(x)
双曲余弦
22
特殊函数
函数名 含义
计算m除以n 的余数
函数名
含义
取超过x的最 近整数
30
二、数值函数运算
2
什么是数学建模?
数学模型(Mathematical Model)是用数学符号对一类 实际问题或实际发生的现象的(近似的)描述. 数学建模(Mathematical Modeling)则是获得该模型 并对之求解、验证并得到结论的全过程. 数学建模不仅是揭示、了解基本规律, 而且从应用的 观点来看更重要的是预测和控制所建模的系统的行为 的强有力的工具. 数学问题 = 建立数学模型 + 求解数学模型 合理假设、建立模型、 求解模型、解释验证. 记住这12(16)个字, 将会终生受用.
24
⑤有了变量,就可以组成表达式,也就可以对变量 进行赋值。MATLAB的赋值语句有两种形式。
● 变量名=表达式 ● 表达式 在第一种情况下, MATLAB 将右边的表达式的值赋 值给左边的变量,在第二种情况, MATLAB 将表达 式的值赋值给系统变量ans。
MATLAB的一些有用的工具箱
MATLAB是很多人经常使用的“懒人”编程软件了。
可是大家是不是有时候仍然觉得他的功能不够强大呢?提供给大家一些matlab的软件toolbox,使得大家在做应用的时候更加得心应手吧。
ZSM (zero sum multinomial)/zsmcode.htmlBinaural-modeling software for MATLAB/Windows/home/Michael_Akeroyd/download2.htmlStatistical Parametric Mapping (SPM)/spm/ext/BOOTSTRAP MATLAB TOOLBOX.au/downloads/bootstrap_toolbox.htmlThe DSS package for MATLABDSS Matlab package contains algorithms for performing linear, deflation and symmet ric DSS.http://www.cis.hut.fi/projects/dss/package/Psychtoolbox/download.htmlMultisurface Method Tree with MATLAB/~olvi/uwmp/msmt.htmlA Matlab Toolbox for every single topic !/~baum/toolboxes.htmleg. BrainStorm - MEG and EEG data visualization and processingCLAWPACK is a software package designed to compute numerical solutions to hyper bolic partial differential equations using a wave propagation approach/~claw/Fusetool - Image Fusion Toolboxhttp://www.metapix.de/toolbox.htmTSTOOL is a MATLAB software package for nonlinear time series analysis.TSTOOL can be used for computing: Time-delay reconstruction, Lyapunov exponents, Fractal dimensions, Mutual information, Surrogate data tests, Nearest neighbor stati stics, Return times, Poincare sections, Nonlinear predictionhttp://www.physik3.gwdg.de/tstool/MATLAB / Data description toolboxA Matlab toolbox for data description, outlier and novelty detectionMarch 26, 2004 - D.M.J. Taxhttp://www-ict.ewi.tudelft.nl/~davidt/dd_tools/dd_manual.html。
吴恩达逻辑回归作业matlab
英文回复:Professor U Nanda is a prominentputer scientist and an authoritative person in the field of machine learning。
He is currently a professor at Stanford University and has served as Vice—President of the Google Data Department。
Professor U Nda is well known for his outstanding contribution in the field of machine and in—depth learning。
Logic regression, an important classification algorithm in the field of machine learning, is widely applied in a number of fields, such as medical diagnosis, risk prediction, advertising rmendations,etc。
Professor U Nda ' s logical regression is important for learners to realize the principles and application of the algorithm model。
The logical regression model is achieved through the use of Matlab programming, which helps learners to better understand the theoretical basis and practical application of the algorithm。
Matlab+homework+3

Matlab Worksheet 3Part Aing function conv_m.m to make convolution between the following to functions (x and h):x=[3, 11, 7, 0, -1, 7, -5, 0, 2];h=[11, 9, 0, -7, -3, 2, 0 -1];nx=[-2:6];nh=[0:7];Plot the functions and convolution results.%convolution function%conv_m.mfunction [y, ny]=conv_m(x,nx,h,nh)nyb=nx(1)+nh(1);nye=nx(length(x))+nh(length(h));ny=[nyb:nye];y=conv(x,h);end%end;x=[3,11,7,0,-1,7,-5,0,2];nx=[-2:6];h=[11,9,0,-7,-3,2,0,-1];nh=[0:7];[y, ny]=conv_m(x,nx,h,nh);Subplot(3,1,1);stem(nx,x);ylabel('x[n]');axis([-6 10 -20 20]);Subplot(3,1,2);stem(nh,h);ylabel('h[n]');axis([-6 10 -20 20]);subplot(3,1,3);stem(ny,y);xlabel('n');ylabel('y[n]');axis([-6 10 -200 200]);-6-4-20246810-20020x [n ]-6-4-20246810-20020h [n ]-6-4-20246810-200200ny [n ]2. Plot the frequency response over π≤Ω≤0for the following transfer function by lettingΩ=j e z , where Ωis the frequency (rad/sample)., with appropriate labels and title.9.06.1)(2++=z z zz H .delta=0.01;Omega=0:delta:pi;H= exp(j.*Omega)./ ((exp(j.*Omega)).^2+1.6*exp(j.*Omega)+0.9); subplot(2,1,1);plot(Omega, abs(H)); xlabel('0<\Omega<\pi'); ylabel('|H(\Omega)|');axis([0 pi 0 max(abs(H))]); subplot(2,1,2);plot(Omega,atan2(imag(H),real(H))); xlabel('0<\Omega<\pi');ylabel(' -\pi < \Phi_H <\pi') axis([0 pi -pi pi]);00.511.522.53510150<Ω<π|H (Ω)|0.511.522.53-2020<Ω<π-π < ΦH <π3. Use fft to analyse following signal by plotting the original signal and its spectrum.⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=10244672sin 10241372sin 1024322sin ][n n n n x πππ.%Examine signal components %sampling rate 1024Hz N=1024; dt=1/N;t=0:dt:1-dt;%****define the signal** x=sin(2*pi*32 .*t ) + ... sin(2*pi*137.*t )+ ... sin(2*pi*467.*t ) ; %***********************subplot(2,1,1); plot(t,x);axis([0 1 -4 4]);xlabel('nT (seconds)'); ylabel('x[n]'); X=fft(x); df=1;f=0:df:N-1;subplot(2,1,2); plot(f,abs(X));axis([0 N/2 0 800]); xlabel('k (Hz)'); ylabel('|X[k]|');00.10.20.30.40.50.60.70.80.91-4-224nT (seconds)x [n ]050100150200250300350400450500200400600800k (Hz)|X [k ]|4. Use the fast Fourier transform function fft to analyse following signal. Plot the original signal, and the magnitude of its spectrum linearly and logarithmically. Apply Hamming window to reduce the leakage.⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=10247.4672sin 10244.1372sin 10245.322sin ][n n n n x πππ.The hamming window can be coded in Matlab asfor n=1:Nhamming(n)=0.54+0.46*cos((2*n-N+1)*pi/N); end;where N is the data length in the FFT.%Windowing for reducing leakage %sampling rate 1024HzN=1024; dt=1/N; t=0:dt:1-dt; % Apply Hamming window %****define the signal** x=sin(2*pi*32.5.*t )+... sin(2*pi*137.4.*t )+... sin(2*pi*467.7.*t ); %*********************** for n=1:Nw(n)=0.54+0.46*cos((2*n-N+1)*pi/N); end ;x1=x .*w;subplot(2,1,1); plot(t,x1);axis([0 1 -5 5]);xlabel('nT (seconds)');ylabel('x[n] Hamming win'); X=fft(x1); df=1;f=0:df:N-1;subplot(2,1,2);plot(f,20*log10(abs(X))); axis([0 N/2 -40 60]); xlabel('k (Hz)');ylabel('|X[k]| (db)');00.10.20.30.40.50.60.70.80.91-55nT (seconds)x [n ] H a m m i n g w i n50100150200250300350400450500-40-200204060k (Hz)|X [k ]| (d b )Part BSimulation Using SIMULINKINTRODUCTIONThe objective of this laboratory is to learn about various properties of signals and systems by doing simulations in SIMULINK.PART 1. BASICS OF SIMULINK1.1 UNDERSTANDING SIMPLE WAVEFORMS AND INTEGRATIONCreate a pulse of height 2 units from time 0 to 4 seconds by subtracting two unit steps and adding a gain. Connect this pulse to an integrator with a gain of 0.5 and a zero initial condition. Connect oscilloscopes to show the pulse and the output of the integrator. You may wish to name your simulation (block) diagram; to do so use the save as feature under edit. Your block diagram should be similar as below.Before simulating you need to pull down the simulation header and double click on parameters. Unless told otherwise always assume that you can use the ode 45 integration algorithm shown in this window and the other default parameters. Typically you will only alter the start and stop times but for this first simulation you can use the default values of 0 and 10 seconds. Double click on the oscilloscopes to get the windows in which the traces will appear, pull down the simulate menu and click on run. Plot below the integrator input and output waveforms.Repeat the experiment but with an initial condition of –2 on the integrator. Again draw the results.1.2 FIRST ORDER SYSTEMA single time constant may be simulated using the transfer function block in which you enter the coefficients of the numerator and denominator polynomials. Set up the configuration in a new SIMULINK window to realise the transfer function 1/(s+2) with the input unit step and an oscilloscope connected to the output of the transfer function block. Plot the block diagram in the space below. Simulate the system for 5 seconds and plot the response.1.3 SECOND ORDER SYSTEMFor the second order all pole transfer function )2/(200220ωωζω++s s you will recall that if a time scale of ω0t is used for plotting the step response, the response shape will only be affected by changes in the damping ratio ζ. This can also be shown if we normalise the transfer function by replacing (s/ω0) by s n togive )12/(12++n n s s ζ. To study the effect of varying ζ on the step response we will therefore use the transfer function 1/(s 2+2ζs+1). Set up the following configuration for a simulation study.i) A unit step input. ii) Connect the unit step to a transfer function of 1/(s 2+2ζs+1) with ζ = 1.0. iii) Take a summing block and connect the input step to a +ve input and the transfer functionoutput to a –ve input.iv) Connect the output of this summer to a square function. This is obtained by using f(u) in thenonlinear blocks.v) Connect the output of this squarer to an integrator. vi) Connect two oscilloscopes to the circuit, one to the transfer function output and the other tothe output of the integrator.vii) Also connect simout blocks to the same signals as the oscilloscopes. Rename the oneconnected to the integrator output simout1.Simulate the system with the values of ζ listed in the table below and fill in the other figures from the simulation results. To get an accurate value at the end of each run you can type simout1 in the MATLAB window. You can also measure the overshoot by making use of the maximum command: simply type max(simout) in the MATLAB window.PART 2. SIMULATION OF AIRCRAFT PITCH ANGLE AND ALTITUTEThe purpose IS to use "SIMULINK" to simulate a (much simplified) model of the longitudinal motion of a fighter aircraft.The "angle of attack", is the angle between the direction a plane is pointing, and the direction in which it actually moves through the air. For a plane flying at approximately constant altitude, this is equivalent to the "pitch angle", φ, as illustrated in Fig.2.1. This angle is important because it produces a lift force, (also shown in the figure). perpendicular to the axis of the plane, and hence a "normal acceleration", anvThe pilot wants to be able to control the pitch angle, and does so ultimately (最后,最终; 基本上; 根本; )by rotating the front fins, and tail elevators of the aircraft, shown in Fig. 2.2. The first task is therefore to model the effect of these movements on the "pitch rate" q( )=φ, and "normal acceleration" a. nFig. 2.2 Illustration of control surfaces2.1: MODELLING THE AIRCRAFT AND ACTUATOR DYNAMICSi) Normal Acceleration, a nThe acceleration of the aircraft in a direction perpendicular to its axis, (the "normal accel.", a n ), is determined mainly by the angle θ1 of the tail elevators of the aircraft shown in Fig. 2.2. Indeed aerodynamic modelling shows that this relationship can be described by the differential equation,11116342.364.1982.81.3θθθ++=-+ n n n a a aConvert this relationship into a transfer function form:-ii) Pitch Rate, qThe rate at which the pitch angle changes, (the "pitch rate", q ), is determined mainly by the angle θ2 of the front fins of the aircraft shown in Fig. 2.2. Indeed aerodynamic modelling shows that this relationship can be described by the differential equation,2227.1125.782.81.3θθ++=-+ q q qConvert this relationship into a transfer function form:-iii) Actuator Dynamics + GearsThe tail elevators of the aircraft are driven directly by a hydraulic actuator which has a transfer function,G s s ()()=-+1414/To a unit step input U(s)=1/s , the response R(s) = G(s)⋅U(s)= 1411)14(14++-=+-s s s s . What form ofstep response r(t) would you expect from this actuator, and what is its time constant?The front fins and the tail elevators are both driven from the actuator by the same drive shaft through a gear box. The same gear on this drive shaft connects to the tail elevator gear wheel, which has 500 teeth, and the front fin gear wheel, which has 100 teeth, the relationship between θ1 and θ2 is52112==t t θθ (4)2.2: SIMULATING THE AIRCRAFT AND ACTUATOR DYNAMICSi) F or the aircraft model you will need from the Continuous or Maths Library:-∙ a Transfer Fcn block to represent the "tail elevator angle 错误!未找到引用源。
PV模型
PV 组件的MATLAB 建模(A detailed modeling of photovoltaic module using MATLAB)摘要:PV 模块是将光转换为电能的接口。
此装置的建模必然要求以气象数据(辐照度和温度)作为输入变量。
输出变量可以是电流、电压、功率等等。
然而I(V)和P(V)的跟踪特性需要这三个变量。
任何输入的变化,必将引起输出的立刻改变。
这就是需要一个精确的PV 模块模型的重要原因。
本文提出了辐照度和温度对PV 模块参数影响的详细模型。
所选择的模型是更准确的串联和并联电阻单二极管模型。
详细的模型是:通过使用MATLAB/Simulink 软件按步骤仿真。
MA TLAB 是使用最频繁和最有效的工具之一。
1.引言所选择模型的等效电路变得更便捷和更贴近实际时,未知参数的数量也随之增加。
但大多数制造商的数据表不提供取决于天气条件(辐照度和温度)的参数的足够信息。
因此,为建立光伏电池和光伏模块的数学模型,对电池性能的物理性质的一些假设是必要的。
此外,使用这些信息是用于构造函数。
本文着重研究的是光伏模块或阵列作为复杂“电能量系统”的一个设备。
因此我们的目标是获取实时最大和最精确功率。
因此,此时的值最接近实验值。
I(V)特性是一个多参数的非线性方程,参数分类如下:一些是由构造函数提供,一些是常数,还有是需要计算得到的。
有些研究人员提出了简化方法,但是一些未知的参数不能计算(因此将它们假设为恒定值)。
例如,在2011年Walker 和Geoff 提出串联一个电阻RS ,但在中等复杂模型中,没有并联阻抗。
Benmessaoud 等人(2010)、Atlas 和Sharaf(1992)、Beckman 等人、Bryan(1999)、Bouzid 等人(2005)都采用相同的假设,即认为并联阻抗非常大(可忽略)。
有些学者同时忽略并联和串联电阻,因为并联阻抗非常大而串联阻抗非常小。
另一方面,有些文献认为PV 组件的这两个内部特征非常重要,且决定精度。
MATLAB产品家族
●提供廣泛的訓練及學習函式●提供Simulink的類神經網路block●可自動將MATLAB產生的類神經網路物件轉成Simulink 模型●提供前處理及後處理函式改善類神經網路訓練及效能●提供視覺化函式更容易瞭解類神經網路之效能(Preceptron)、倒傳遞網路(Backpropagation)、自組織映射網路(SOM)、徑向基網路(Radial Basis Network)、學習向量量化網路(LVQN)..等.◎ Curve Fitting Toolbox(曲線契合工具箱)產品特色●可透過圖形化使用者介面或指令列操作各種功能●可作資料前置處理的例行程序設定,例如資料排序、分割、平滑化、及除去界外值(outlier)等●擁有線性或非線性參數契合模型的龐大的函式庫,與最佳化的起始點(starting points)以及非線性模型參數的解題器●多樣的線性和非線性契合方法,包括最小平方法、加權最小平方法、或強韌契合程序(robustfitting procedures) (上述全部支援限制係數範圍或不限制係數範圍的功能)●客製化的線性或非線性模型發展●使用Splines或內插法(interpolants)進行非參數(Nonparametric)契合●支援內插法、外插法、微分以及積分計算簡介1.功能就是可將客戶的資料畫成圖形,接著提供現有標準的一些數學式子來找出符合這圖形的方程式,例如y=ax+bx^2+cx^3。
2.裡面有提供許多的數學式子,也可讓User自定自己的數學函式,而此工具箱可幫客戶算出數學式子的係數(如a,b,c等)3.提供polynomial, exponential, Fourier, rational等數學model給客戶Note: 此套工具不能作曲面的契合,即是如果客戶要求要作y=ax1+bx2 找出a與b,是不可以的,因為此工具箱只能找出單一變數x的係數。
建議他們購買OP and SP 解決他們的問題。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Numerical Approximations in Differential EquationsThe Runge-Kutta Methodby Ernest NgaruiyaMay152007AbstractIn this paper,I will discuss the Runge-Kutta method of solving simple linear and linearized non-linear differential equations.I start by stating why the Runge-Kutta method is ideal for solving simple linear differential equa-tions numerically in comparison to more elementary methods.I will then proceed to explain what steps the method actually carries out in solving the differential equation along with the matlab code I used to write a simple Runge-Kutta solver and the output of the code,given some basic differential equations.I will then end by discussing the pitfalls of this way of solving differential equations.1IntroductionAny nth order linear ordinary differential equation can be expressed in the form of a system offirst order linear ODEs.Numerical approximation can be applied to effectively analyse differential equations that may not be easy to solve by traditional methods.Once any ODE has been expressed as a linear system,any of the methods of linear algebra can be applied on the system. The Runge-Kutta method is a far better method to use than the Euler or Improved Euler method in terms of computational resources and accuracy. All these methods use afixed step size,but there are other methods that use a variable step size(though not neccessarily better in all circumstances). While essentially the Euler methods are simple Runge-Kutta methods,I,like has now become common,refer to the fourth-order Runge-Kutta method as the Runge-Kutta method.2The Euler and Improved Euler methods For an initial value problemdy/dx=f(x,y),y(a)=y0that has a unique solution y(x)on the closed interval[a,b]and given that y(x)has a continous second derivative on that interval,then there exists a constant C such that for the approximations y i to the actual values y(x i)1computed using the Euler’s method with step size h > 0,|y n − y (x n )|≤ ChFor n =1,2,3,.. . ,kfor the Euler method, and|y n − y (x n )|≤ Ch 2for the improved Euler method. Here, h is the step size. This implies that the error is of order h in the Euler method and order h 2 in the improved Euler method. The proof can be found in the book, Ordinary Di fferential Equa-tions by G. Birkho ff and G.C. Rota. On the other hand, the Runge-Kutta method is a fourth-order method (Runge-Kutta methods can be modified into methods of other orders though). The Euler methods su ffer from big local and cumulative errors. The improved Euler method and the Runge-Kutta method are predictor-corrector methods and are more accurate than the simple Euler method.3 The Runge-Kutta MethodThis method uses the simple fact that, for a given actual change in the out-put y, we can use the fundamental theorem of calculus to express the change in the form of an integraly (x n +1) − y (x n )= x x n n +1 y (x ) dx =x x n n +h y (x ) dx We can then use Simpson’s rule for numerical integrationy (x n +1) − y (x n ) ≈ h y (x n )+4y (x n + h 2 )+ y (x n +1)6y n +1 ≈ y n + h y (x n )+2y (x n + h )+2y (x n + h )+ y (x n +1)6 22 I used matlab to write out some code that implements an algorithm that uses the Simpson’s rule to approximate solutions for a given number of steps. Us-ing the code, one can solve any nth order linear ODE as long as you specify the initial conditions. I have shown that by attempting to approximate the solutions to a first order ODE and a second order ODE. The code is shown2below:function[T,X]=hrungekutta(t,x,t1,n,f)T=t;X=x’;h=(t1-t)/n;for i=1:n;k1=f(t,x);k2=f(t+h/2,x+k1*h/2);k3=f(t+h/2,x+k2*h/2);k4=f(t+h,x+k3*h);x=x+h*(k1+2*k2+2*k3+k4)/6;t=t+h;T=[T;t];X=[X;x’];endThis function takes the form f(t initial,[x0;y0],t final,steps,@ode)I implemented ODEs as functions.So it can take in any ODE as long as you express it in the form of a linear system and you specify its initial values. Note that in Matlab,to input a function to another function,you must use the@sign in front of the input function’s name.For example,the function ddxeqnegx is the ode x =−x.In this case,you will input@ddxeqnegx.Example:[T,X]=hrungekutta(0,[0;1],5,10,@ddxeqnegx)This solves x =−x whose general solutions are of the form[sin(t),cos(t)] for t running from0to5where the initial values are x=0,y=1,since you change x =−x to the system offirst order ODEs x =y,y =−xThe code for the input ODE is:function X=ddxeqnegx(t,x)X=x;X(1)=x(2);X(2)=-x(1);3A graph of the solution is shown in the next page:An example of afirst order ODE is[x,y]=hrungekutta(0,[0],1,10,@pidiff) which approximates the solution to dy=4,with the initial value y0=0.24 Note that the general solution to this differential equation is y=arctan(x).Therefore,y1≈π.Outputs for a ten step Runge-Kutta method are shown below.x=0.10000.200040.30000.40000.50000.60000.70000.80000.90001.0000y=0.39870.78961.16581.52201.85462.16172.44292.69902.93133.1416With1000steps,I gotπ=3.1415926535897914Pitfalls in the Runge-Kutta method and other numerical methodsThere are a number of problems faced by the Runge-Kutta method.While I will not go into the details here,I will use an example equation to illustrate a problem that one could face.Consider the equationdy=5y−6e−x,y(0)=1dxIts general solution is5y(x)=e−x+Ce5xWith the initial condition y(0)=1,then C=0A small error in the evaluation of the output leads to a non-zero value of C.Since the exponent is big,a very small error in approximation(which is almost inevitable)leads to a huge error in the output. AcknowledgementI would like to thank my instructor Vera Hur for great suggestions on how to write this paper and putting me in the same group as Lisa Danz,Marcelo Alvisio,Laura Evans and Oleg Golberg who are all interested in Numerical Methods of approximating differential equations.I would also like to thank Josh Nichols-Barrer,who showed us some really neat problems in math. References[1]Birkhoff,Garrett and Rota,Gian-Carlo.Ordinary Differential Equations 4th ed.(John Wiley&Sons,New Jersey,1989)[2]Edwards,Henry and Penney,David.Elementary Differential Equations with Boundary Value Problems4th ed.(Prentice Hall,1999)[3]/wiki/Runge-kutta6。