GPS作业05
2024版年度GPS的使用教学课件全

•GPS概述与基本原理•GPS设备类型与选购指南•GPS软件安装与设置教程•地图数据下载与更新方法•导航功能使用技巧与实例演示•轨迹记录与分享功能应用•总结回顾与拓展延伸GPS概述与基本原理GPS定义及发展历程GPS定义全球定位系统(Global Positioning System,GPS)是一种基于卫星的无线电导航定位系统,可为全球用户提供全天候、连续、实时的三维位置、速度和精确时间信息。
发展历程自20世纪70年代美国国防部开始研制以来,GPS技术不断成熟和完善,已广泛应用于军事、民用等多个领域。
全球定位系统组成与功能组成部分GPS系统由空间部分(卫星星座)、地面控制部分(地面监控系统)和用户部分(GPS信号接收机)三大部分组成。
功能作用GPS系统具有定位、导航、授时和测速等功能,可广泛应用于交通、测绘、农业、气象、环保等领域。
信号传输与接收原理信号传输GPS卫星向地面发射无线电信号,这些信号包含有卫星的位置信息、时间信息等。
接收原理地面上的GPS接收机在接收到卫星信号后,通过测量信号传播时间、多普勒频移等参数,解算出接收机与卫星之间的距离,进而确定接收机的三维位置、速度和时间等信息。
误差来源及精度评估方法误差来源GPS定位误差主要来源于卫星时钟误差、星历误差、大气层延迟误差、多路径效应以及接收机噪声等。
精度评估方法通常采用定位精度、测速精度和授时精度等指标来评估GPS系统的性能。
其中,定位精度是指接收机解算出的位置信息与真实位置之间的偏差程度;测速精度是指接收机解算出的速度信息与真实速度之间的偏差程度;授时精度是指接收机提供的时间信息与真实时间之间的偏差程度。
GPS设备类型与选购指南手持式GPS设备特点及适用场景特点轻便易携,防水防震,电池续航时间长,具有高精度定位能力。
适用场景户外探险、徒步旅行、野外作业等需要精确定位和导航的场合。
车载式GPS设备优缺点分析优点屏幕尺寸大,显示清晰,可接入车载电源,支持语音导航和实时路况等功能。
物流信息技术(GPS)

路径实时调整
根据实时路况信息和天气状况,对运输路径进行实 时调整,确保运输过程的安全和效率。
多模式路径规划
支持多种交通方式的路径规划,如公路、铁 路、水路等,满足不同运输需求和成本考虑 。
03
GPS技术优势与限制
技术优势
实时定位
GPS技术可以实时追踪和定位物品或 车辆的位置,提供准确的物流信息。
人工智能技术将在物流行业中得到更广泛的应用,推动物流行业的 智能化和自动化发展。
物联网与物流融合
物联网技术将与物流行业深度融合,实现物流各个环节的智能化和 协同化。
THANKS FOR WATCHING
感谢您的观看
GPS系统组成
上运行,并不 断发送信号。
地面控制部分
负责监控卫星的运行状态和传输校正参数。
用户部分
包括GPS接收器和数据处理软件,用于接收卫星 信号并计算位置和时间信息。
02
GPS在物流中的应用
运输管理
实时监控
通过GPS技术,对运输车辆进行实时 监控,了解车辆的位置、速度和行驶 轨迹,确保运输过程的安全和效率。
室内定位技术
01
随着技术的发展,室内定位将成为GPS技术的重要发展方向,
以解决建筑物内部和地下空间的定位问题。
与其他技术的融合
02
未来GPS技术将与其他物流信息技术如物联网、大数据等融合,
进一步提高物流效率。
智能化发展
03
通过与人工智能技术的结合,GPS技术将实现更智能的路线规
划和物品追踪。
04
GPS在物流行业的挑战 与解决方案
物流信息技术(GPS)
目 录
• GPS技术概述 • GPS在物流中的应用 • GPS技术优势与限制 • GPS在物流行业的挑战与解决方案 • GPS在物流行业的未来展望
GPS定位器 GT05短信指令表
定位网址1、激活(必须要做,否则无法进行其它操作)使用手机给追踪器发送短信:SZMM,初始密码,新密码,追踪器电话号码。
其中初始密码为123456,新密码由用户自己设置。
【举例】SZMM,123456,123456,138XXXXXXXX其中“138XXXXXXXX”为追踪器内所插卡的电话号码。
收到提示成功的短信后,车主可以进行其它短信指令操作或网上查车操作。
2、短信操作1)设置密码方法同上节中的“激活”操作。
2)定位车主手机发送短信“DW”到追踪器电话号码上,追踪器将回复中文短信,短信中描述车辆当前所处的位置。
比如:XX省XX市XX路XX大厦附近。
3)经纬度定位车主手机发送短信“DWJW”到追踪器电话号码上,追踪器将回复车辆所属的位置参数(经纬度和基站编号),并不回复所处位置的具体文字描述。
4)设防车主手机发送短信“SF”到追踪器电话号码上。
设置成功后,车辆被非法移动或非法振动时将会以短信的方式给车主告警。
5)撤防车主手机发送短信“CF”到追踪器电话号码上。
设置成功后,追踪器恢复到平常状态。
3设置参数车主发送“SZCS”指令,可以对车辆的相关配置信息进行修改。
指令格式如下:SZCS,密码,参数名=参数值(,参数名=参数值,……)参数名可以为下列几种:(1)MODE 修改上报模式,MODE=0表示NET,MODE=1表示WAP,MODE=2表示不连接GPRS(2)TRACE 查询是否开启追踪,1是开启追踪,0是关闭追踪(3)FREQ 修改追踪模式下数据上报频率,单位为秒,最低为10秒。
如:FREQ=10 默认15秒(4)RADIUS 设置车辆越界报警半径,单位为米 (要求>200米)(5)VIBL:振动灵敏度0~15,0为最高灵敏度,太高可能会误报,15为最低灵敏度(6)VIB 振动短信通知,VIB=0表示关闭振动短信,VIB=1表示开启振动短信例如:开启震动短信通知:SZCS,密码,VIB =1关闭振动短信通知:SZCS,密码,VIB =0【注】:厂家默认关闭需要此功能请自行打开,并在设防状态才能报警。
物流运输中的GPS定位与追踪系统

为了保证系统的稳定运行和数据的准 确性,物流企业需要定期对GPS定位 与追踪系统进行维护和保养。这需要 投入一定的资金和人力成本。
05
GPS定位与追踪系统的未来发展
物联网技术的融合
物联网技术将与GPS定位与追踪系统 深度融合,实现物流运输过程中的实 时监控、数据采集和智能调度。
通过物联网技术,可以连接各种运输 设备和传感器,收集运输过程中的温 度、湿度、压力等环境数据,为物流 运输提供更准确、可靠的信息。
功能
实时监控运输工具的位置、速度、方向等动态信息;记录运输工具的行驶轨迹 ;提供预警和调度功能等。
工作原理
GPS接收器
安装在运输工具上的GPS接收器通过接收卫星信号,获取运输工具 的经度、纬度、高度、时间等信息。
数据传输
通过无线通信技术(如GSM、GPRS、CDMA等),GPS接收器将 获取的位置信息传输到数据中心或监控平台。
物流运输中的GPS定 位与追踪系统
目录
• GPS定位与追踪系统概述 • GPS定位与追踪系统在物流运输中的应用 • GPS定位与追踪系统的技术实现 • GPS定位与追踪系统的优势与挑战 • GPS定位与追踪系统的未来发展
01
GPS定位与追踪系统概述
定义与功能
定义
GPS定位与追踪系统是一种利用全球定位系统(GPS)技术,对物流运输过程 中的车辆、船舶、飞机等运输工具进行实时定位和追踪的现代化管理系统。
信息呈现
数据中心或监控平台对接收到的数据进行处理,以地图、表格、图表 等形式展示运输工具的实时位置和轨迹,方便用户进行监控和管理。
GPS定位与追踪系统的重要性
提高运输效率
实时监控运输工具的位置和轨迹,优化调度和路线规划, 减少运输时间和成本。
GPS调度系统驾驶员操作办法
GPS调度管理系统驾驶员操作办法为保障线路营运秩序和GPS智能营运调度管理系统的正常,结合系统与GPS车载终端的操作要求,特制订如下操作办法:一、操作按钮功能GPS终端机的顶部有6个功能按钮,从左至右依次按1-6号排序。
1号键:方向-终点转向键;用于调整行车“方向”设臵,除每天的班次头班或特殊情况需手动操作外,正常营运时,在车辆行驶至线路终点折返处会自动转换“方向”。
2号键:查询-状态查询键;使用2号键可以显示或查询“日期、时间、签到、签退、当前线路、最近1条发车指令、时速、本班行驶里程、乘客人数统计、当前车辆所处位臵、车号、GPS终端机工作状态、车辆当前位臵经纬度”信息。
3号键:选项-信息选择键;3号键预设“恢复正常、线路堵车、请求通话、乘客超载、乘客纠纷、请求排班、放空、车辆进场、车辆故障、停止营运、交通事故、包车”共12项信息选项,供驾驶员根据实际情况选择。
4号键:发送-信息发送键;在3号键选择相关信息后,按4号键即可发送。
5号键:设臵-报站测试键;用于测试电子报站器语音。
6号键:通话-电话接听键。
用于和调度中心进行语音通话,语音通话为单向设臵,驾驶员需与调度中心通话联系时,应使用3号键选择“请求通话”选项并发送,然后等待调度中心发起通话,驾驶员听到电话振铃后,拿起听筒,按一下6号键,即可与调度中心进行通话。
听筒使用方法:驾驶员讲话时,要按住听筒旁边的按钮,听调度中心讲话时,要松开听筒旁边的按钮。
通话时间超过2分钟会自动中断通信,如需继续通话,可重新请求。
二、早发班前的操作方法1、驾驶员到达停车场后,先开启IC卡收费机和GPS终端机电源,检查IC卡收费机和GPS终端机的状态是否正常。
●开机后,IC卡收费机能显示和刷卡签到即表示正常;●GPS终端机能显示时间且右侧指示灯为绿色即表示正常。
2、在检查状态正常后,驾驶员进行签到操作。
●安装IC卡收费机的车辆,驾驶员按一下IC卡收费机上的黑色按钮,显示屏显示“司机签到、请刷卡”,刷卡后,显示屏显示“签到成功”,几秒钟后,GPS终端机会发出音乐声,同时显示“签到信息发送成功”。
UT05 GPS Vehicle Camera&Navi Tracker User Manual
UniGuard Technology LimitedGPS/GPRS/GSM Camera&NaviTrackerUT05 User ManualUniGuard Technology Limited1 GPS Tracking System IntroductionGPS Camera Tracker integrates GPS and GSM functions, which could send vehicle location and status to mobile and Internet. It can track the vehicles remotely and transmit image of the vehicle to Internet through camera. The system structure is as below:UniGuard Technology Limited 2 Product Description2.1 S pecificationGSM module:● Band:850/900/1800/1900MHz● Max RF Output: 33.0dBm±2dBm● Dynamic Input Range: -15 ~ -102dBmGPS module:● GPS chip set: SiRF Star III● Frequency: L1, 1575.42 MHz● Number of Channel: 20UniGuard Technology Limited Interface:● 1 Camera interface● 1 extend R232 port● 1 A/D Port● general I/O Ports● 1 Microphone interfaceBattery:● Voltage:3.7V● Charge:<4.2V● Li-ion: 200~850mAhInput Voltage: DC 9~36VOperating Temperature:-45~65 ℃2.2 F eatures:1. Use Google map, Global free2. Take photo of the vehicle, and Image transmit to internet.3. Fuel Check / monitor4. Real-time locating / inquiry5. SOS button/Power-cut Alarm6. Listen by telephone7. E-fence/Over-speed Alarm8. Compatible original anti-theft9. Remote control engineUniGuard Technology Limited3Installation Instructions3.1 InterfaceGPS 1GSM1324DATA1DATA26273849510DATA1 No .DescriptionNo .Description1 DC+ (9~36V) 6 GND2 Fuel check line 7 SOS button3 GND 8 Extend port1(Assist alarm)4 ACC9 Extend port2 5Engine cut_off control10Extend port3DATA2: Camera portSIMMICPHONE LED1ResetLED21、SIM: Port for SIM card2、PHONE: Connect to MicrophoneUniGuard Technology Limited3、MIC: Connect to earphone4、LED1: Power light5、LED2: Status light6、ResetUniGuard Technology Limited 3.2 Installation FigureUniGuard Technology Limited3.3 Installation and Test:Please test after installation. If you don’t need some functions, you can disconnect corresponding interface. Please make sure ACC, DC, GND installed correctly. Otherwise, the device cannot work. Please check the device status through signal light after power on:LED1 is off indicates there is no power.LED2 flashes for one second which indicates GSM registers successfully.LED2 flashes three seconds once which indicates GPS is obtaining orientationLED2 is on which indicates work successfully that GSM has registered and GPS has obtained the orientation.If LED 2 is on 0.1 second then off 0.1 second for more than 3 minutes, please make sure SIM card inserts well. Without SIM card, the device cannot work.4 SMS Operation InstructionSMS Format: A******,cmd,param1,param2…1. ******is the password, Initial Password is 0000002. cmd is the command ID.3. Param is the command parameter. Different cmd use different parameters. All the parameters must use half-angle symbol. Wrong SMS format or wrong password, it will not respond.UniGuard Technology Limited4.1 Location Inquiry (000/100)1. Google Map reply Message format: A******,000e.g. A000000,000Reply: /maps?q=22.54079,113.93923 09-10-20 17:38:30 Speed:20you can use the website to Enquiry on google Map2. Detailed Address Name reply Message format: A******,100e.g. A000000,100Reply: 42 Xiacheng North Rd, Wujin, Changzhou, Jiangsu, China 4.2 Change Password (001)Message format:A******,001,New Passworde.g. A000000,001,123456Note:000000 is the old password ,123456 is the new password. Reply:Set Password OK!4.3 Real-time return setting (002)Message format:A******,002, XXXXXX=0 is for STOP, value of XXX is within [15~64800] seconds.e.g. A000000,002,30UniGuard Technology Limited Message replied after successful setting: Set time interval (30) OK!Message contains position information will be sent in every 30 seconds after successful setting.4.4 Alarm/Listen Number settingMessage format:A******,003,P, TelNumberP=1 is for SOS and listenP=2 or 3 is the second\ the third listen number.e.g. A000000,003,1,136xxxxxxxxMessage replied after successful setting:Set Telephone OK!Keep pressing SOS button for 2 seconds. The device will send emergency SMS and dial the number you set as SOS number. Reply: SOS Pos: Longitude E114.04577 Latitude N22.32405 08-10-20 17:38:30,If you dial with your listen number, it can be connected automatically after the 7th ring. Then you can listen the voice in the vehicle.4.5 Over-speed Alarm Setting (005)Message format:A******,005,XXXXXX=[000,200] (unit: km/h)XXX=00 is close the function.e.g. A000000,005,020Message replied after successful setting: Set Over speed (20) KM OK!UniGuard Technology LimitedIf the vehicle is over speed you set, it will send alarm SMS to SOS mobile number. 20 KM/H Over speed!4.6 e-Fence Setting(006)Message format:A******,006,XXXX =[00-50] (Unit:100m) .When XX=0, e-Fence is OFF. And the maximum limited value of XX is 50*100=5000m. e.g. A000000,006,10Reply: Set Distance (1000)M OK!When user is out of the bound region (e.g. 1020m), a prompt message will be sent to the user: 1020m is further than 1000m!4.7 Engine Cut-off Setting (007)Message format: A******,007,XX=0 cut off engine , x=1 resume engine, For security, this command will execute when the speed less than 20Km / h or the ACC is off . e.g. A000000,007,04.8 Fuel data collect(017)Message format: A******,017,XXNote:XX =[0 , 100], which corresponds to fuel percentage. For example: if the fuel meter shows 50% fuel, (A000000,017,50),and theUniGuard Technology Limiteddevice checking value is 170, it will reply: Oil interval (50:170)!You can view fuel line in GPS Vehicles Tracking system.4.9 Open/Close camera function (019)Message format: A******,019,XX=0 close camera function, x=1 open camera functione.g. A000000,019,05 GPRS Communication Settings5.1 Set APN (APN(Access Point NAME))Message format: A******,012,APNLength of APN is limited within 100 characters, E.g:A000000,012,cmnet“cmnet”is the APN of China Mobile5.2 Set the IP and Port of Gprs_ServerMessage format: A******,010,IP,PORTe.g. A000000,010,121.37.58.10,6903121.37.58.10 is the IP of GPRS_server, 6903 is the port of GPRS_Server application (be in communication with GPS camera tracker)UniGuard Technology Limited5.3 Open GPRS functionMessage format: A******,011,X(note:x=1 open GPRS, X=0 close GPRS)e.g. A000000,011,1GPRS function will be open, and GPS Camera tracker will send data to Internet,Users can turn off this function though send SMS: A000000,011,05.4 Query the GPRS SettingMessage format: A******,004The device will send back GPRS setting parameters. You can check whether the parameter sets correctly by it.(1)Device ID(2)APN (China Mobile is CMNET, China Unicom is UNINET)(3)Server IP address(4)Server port(5)GPRS open status(0- off ,1- on)(6)GPRS connecting status(0- Internet is bad,1- work well)(7)GSM signal value(1~31),if value<10 is too weak to work well.UniGuard Technology Limited6 GPS tracking system on website6.1 User LoginGoogle Map can support many different languages. It can change language for local language by itself.6.2 Vehicle real-time tracking1 choose vehicle →2 map mode → 3.vehicle state, Google map have3 model: map mode ,satellitic mode and Hybrid mode Map mode satellites mode:UniGuard Technology Limited6.3 Vehicle history record playbackPlease point run history review page1 choose vehicle →2 start time →3 inquire time →4.setup review speed →5 start review process you can know that time date , speed , way and distance sum.UniGuard Technology Limited6.4 View image1 Select date range→2Select Vehicle→3View Image →4Click the time link to display image →5Image6.5 Fuel LineShows as above:1 It shows normal fuel consumption. The fuel decreases slowly.2 It shows abnormal fuel consumption, and it decreases straightly.It may be fuel leak or fuel stolen.UniGuard Technology Limited3 It shows the fuel increases straightly. It should be in fuel up.4 It shows the fuel without change. It should be in parking.7. Navigation scheduling management operations7.1 Start Navigation to setting:When Navigation starts, the interface will shows above, the user can click Settings, set the GIS scheduling software, select the Nav Path , then select Autorun.exe programme from SD card. Selecting Auto run navigation,Then click save it , retreated to the main interface, click on the GPS, the interface will enter into the GIS scheduling management interface (7.2), when open navigation each time at later, GIS will be automatically entered GIS scheduling management interfaceUniGuard Technology Limited8.GIS messaging operationsUse mini_usb, connected the tracker with navigation, after communication is normal, the last column shows the latitude and longitude information and the strength of GSM, Recv box will show the scheduling information and the broadcast information, from the GIS management platform and the broadcast information, the driver can Enter the information in the send form, and sent it to GIS management center.UniGuard Technology LimitedClick the “SET” button, the user interface is as following, and the user can set the APN, the server IP and the navigation map paths, the user can open the GPRS or close the GPRS via this interface after setting the APN,IP & navigation map.Click the “Select”button, select navigation maps, the local navigation maps installed in the SD card, which is bought by the user, the parameter of navigation is COM1, Baud Rate 9600bpsUniGuard Technology LimitedTelephone calling operations:The driver can make telephone call via the navigator, click the “CALL” button the user interface is as following,。
中海达RTK两个控制点如何计算四参数
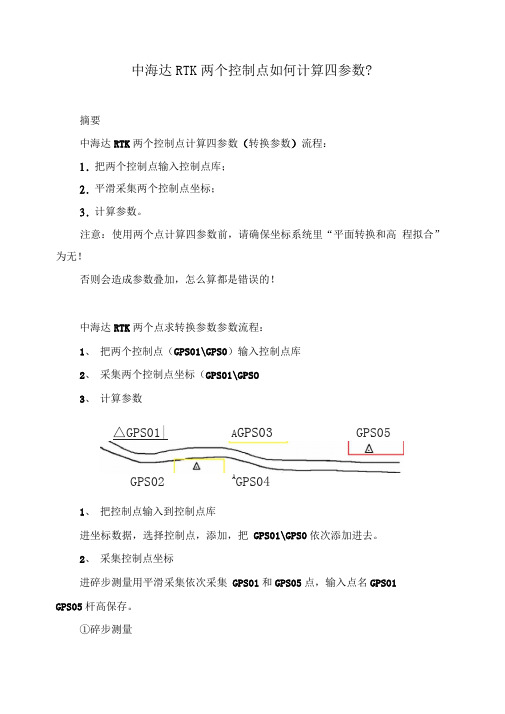
中海达RTK两个控制点如何计算四参数?摘要中海达RTK两个控制点计算四参数(转换参数)流程:1.把两个控制点输入控制点库;2.平滑采集两个控制点坐标;3.计算参数。
注意:使用两个点计算四参数前,请确保坐标系统里“平面转换和高程拟合”为无!否则会造成参数叠加,怎么算都是错误的!中海达RTK两个点求转换参数参数流程:1、把两个控制点(GPS01\GPS0)输入控制点库2、采集两个控制点坐标(GPS01\GPSO3、计算参数△GPS01|A GPS03GPS05GPS02 A GPS041、把控制点输入到控制点库进坐标数据,选择控制点,添加,把GPS01\GPS0依次添加进去。
2、采集控制点坐标进碎步测量用平滑采集依次采集GPS01和GPS05点,输入点名GPS01GPS05杆高保存。
①碎步测量气泡水平居中点平滑采集图标开始采集,平滑采集10次,输入点名(GPSO1、杆高(1.8 )。
平滑采集,每秒采集一次,采集 10次求平均,精度较高!③重复以上操作,采集控制点 GPS05把移动站放在控制点 GPS051, 气泡水平居中,点平滑采集图标开始采集,平滑采集10次,输入点名(GPS05、 杆高(1.8 )Z工具②点显示隐藏图标采集控制点GPS01把移动站放在控制点 GPSOlh ,碎部测量 点放样 线放样文本图根测最 道路放样橫断面采集道路设计楼断面点库 土方计算 H文本 碎部测量 配置②默认计算类型“四参数+高程拟合”,点添加依次添加 GPS01和GPS05④ 添加GPS01,源点进点库从坐标点库选择 GPS01目标点一一进点库从控制点库选择GPS01保存。
⑤ 同样添加GPS05,保存⑥ 添加结果⑦ 计算⑧ 计算结果:四参数平移北:一平移东:一旋转:一尺度 K:无限接近 1,即 0.999xxxxxxx < K vl.OOOxxxxxxx高程拟合改正值A:XX.XXXX 3、计算参数①进计算参数 参数计算点名源貧)/N(rm) 源 L(D )/E([H ㊉添加西打开日保存。
GPS基础知识培训

个人定位
GPS技术可用于个人定位 、追踪和救援,保障人身 安全。
授时同步领域应用
STEP 01
电力系统
STEP 02
通信网络
GPS技术可为电力系统提 供高精度的时间同步服务 ,确保电力系统的稳定运 行。
STEP 03
金融交易
GPS技术可为金融交易提 供精确的时间戳服务,确 保交易的公正性和安全性 。
GPS基础知识培训
• GPS概述与基本原理 • GPS接收机类型与性能参数 • GPS定位技术与方法 • GPS应用领域与案例分析 • GPS数据处理与误差分析 • 未来发展趋势与挑战
目录
Part
01
GPS概述与基本原理
GPS定义及发展历程
• 全球定位系统(Global Positioning System,GPS)定义:一种基于卫星的无线电导航定位系统,可为全球范围内 用户提供连续、实时、高精度的三维位置、速度和时间信息。
THANKS
感谢您的观看
多模多频接收机技术展望
多模接收机技术
开发能够同时接收多种卫星导航系统 信号的多模接收机,提高定位精度和 可用性。
多频接收机技术
软硬件协同设计
通过软硬件协同设计,优化接收机性 能,降低功耗和成本。
利用多频信号处理技术,提高接收机 抗干扰能力和定位精度。
人工智能和大数据在GPS中应用前景
人工智能在GPS中的应用
全球卫星导航系统(GNSS)的兼容与互操作
探讨不同卫星导航系统之间的兼容性和互操作性,提高全球定位、导航和授时服务的可靠 性和精度。
卫星导航增强技术
研究利用地基增强、星基增强等技术手段,提高卫星导航系统的定位精度、可用性和完好 性。
GPS 定位器 (GPS+SMS+GPRS) Version 5.0
GPS定位器(GPS+SMS+GPRS) Version 5.0一.产品介绍KH-110P 是安装GPS和GSM/GPRS模块的个人远端定位系统。
它是一台体积小巧,适合携带,远程定位准确的跟踪设备。
在移动过程中可以通过GPS全球定位通讯卫星精确的得到位置信息。
然后把所在位置的经度和纬度信息同时发送到您的手机中。
您可以根据这些特点用于搜索和保护丢失的小孩和智障老人。
更多的,您还可以用于保护和定位跟踪运输贵重物品的押送车辆以及家庭宠物。
您可以使用KH-110P,将定位短信发到手机上,配合PC/PDA/导航仪地图进行定位跟踪;、同样也可以利用RedView GPS的超低成本的DIY跟踪控制中心系统,终端直接连接电脑,实现全自动跟踪定位。
整个定位过程无需交付任何定位服务费或者月租费。
KH-110P具备1个SOS紧急求救按键和2个快速拨号键,非常适合老人/小孩的保护、寻找、求救方面的使用。
二.主要特征1使用GPS个人定位,精度大大高于GSM定位2GSM/SMS 通信功能或GPRS TCP/UDP连接3全球通用;支持4频段,GSM 850/900/1800/1900 MHz客户可选4使用最新的SiRF-Star III GPS 芯片,灵敏度极高,它提供了动态环境下的,无缝导航能力,即使在仅拥有咫尺天空的城市高楼峡谷中,仍可良好工作5体积只有一张名片的大小,便于携带和隐藏6功率消耗低7信号接受速度快8支持定时连续跟踪功能9支持特定区域范围跟踪10支持指定范围超出电话报警11支持警报和远距离监控12支持2个按键快速拨号的功能13在不防碍个人生活的条件下时实跟踪监控14提供短信与网络跟踪位置15通过短信查找移动物体的位置(简单的系统讯息)16SOS按键向外发出紧急求救信号并把准确的位置发送到求救中心17支持超速电话报警功能18不用支付月租费的控制中心3详细规格3硬件GSM 模块内含频率GSM 850/900/1800内含GSM 850/900/1800/1900Mhz (可选)或GPRS TCP/UDPGPS 模块最新GPS SiRF-Star III 芯片组GPS 灵敏度-158DbGPS 频率L1, 1575.42 MHzC/A 编码 1.023 MHz chip rate通道20 通道查看跟踪位置精确度10 米, 2D RMS速度精确度0.1 m/s时间精确度同步GPS时间默认数据WGS-84重新获得平均0.1秒热启动平均1秒暖启动平均38秒冷启动t平均42秒高度限制18,000 公尺 (60,000 英尺) 最大值速度限制515 公里/second (1000 knots) 最大值.加速度限制小于 4g抖动限制20 米/秒其它工作温度 -25°~ 65° C湿度 5%~ 95% 不凝固的尺寸76 mm × 46 mm × 25 mm电压可充放电电池1300 mAh (3.7V),5V供电输入电压充电端口DC 5V (USB端口)待机时间 60小时显示电源, GPS 和GSM 状态,LEDsLED灯 3和其它的工作状态个按键分别为紧急求救SOS,快速拨号键A,快速拨号键B。
中海达RTK两个控制点如何计算四参数

中海达R T K两个控制点如何计算四参数Last revision on 21 December 2020中海达RTK两个控制点如何计算四参数摘要中海达RTK两个控制点计算四参数(转换参数)流程:1.把两个控制点输入控制点库;2.平滑采集两个控制点坐标;3.计算参数。
注意:使用两个点计算四参数前,请确保坐标系统里“平面转换和高程拟合”为无!否则会造成参数叠加,怎么算都是错误的!---------------------------------------------------------中海达RTK两个点求转换参数参数流程:1、把两个控制点(GPS01\GPS05)输入控制点库2、采集两个控制点坐标(GPS01\GPS05)3、计算参数1、把控制点输入到控制点库进坐标数据,选择控制点,添加,把GPS01\GPS05依次添加进去。
2、采集控制点坐标进碎步测量用平滑采集依次采集GPS01和GPS05点,输入点名GPS01、GPS05,杆高保存。
①碎步测量②点显示隐藏图标采集控制点GPS01,把移动站放在控制点GPS01上,气泡水平居中。
点平滑采集图标开始采集,平滑采集10次,输入点名(GPS01)、杆高()。
平滑采集,每秒采集一次,采集10次求平均,精度较高!③重复以上操作,采集控制点GPS05,把移动站放在控制点GPS05上,气泡水平居中,点平滑采集图标开始采集,平滑采集10次,输入点名(GPS05)、杆高()3、计算参数①进计算参数②默认计算类型“四参数+高程拟合”,点添加依次添加GPS01和GPS05。
④添加 GPS01,源点进点库从坐标点库选择GPS01,目标点——进点库从控制点库选择GPS01,保存。
⑤同样添加 GPS05,保存⑥添加结果⑦计算⑧计算结果:四参数平移北:—平移东:—旋转:—尺度K:无限接近1,即 < K <高程拟合改正值A:注意:尺度K<,尺度K>应该考虑操作错误或控制点有问题,必须检查错误重新计算!⑨点击应用!4、检核精度参数计算完后,必须对所计算的参数进行精度检核,检核方法有两种:①进碎步测量,测任意控制点坐标(N,E,Z)与已知坐标(N,E,Z)对比。
GPS原理及应用A试卷答案-图文
GPS原理及应用A试卷答案-图文姓名学号班级专业------------------------------------------------------------------------------密------------------------------封----------------------------------线-----------------------------------------------------------甘肃交通职业技术学院2022——2022学年第一学期期末考试试卷课程名称:GPS原理及应用【A】考试类型:开卷班级:道桥1201、1202、1203、1204、1205、1206班,造价1201、1202、1203、1204班教师(签名):张文教研室主任(签名):注意事项:1、本试卷为密封试卷,考生在答题前务必要认真填写班级名称、本人姓名、学号及其它有关内容。
2、密封线内不准答题或做任何标记。
题号得分一二三四五总分A、几何中心B、相位中心C、点位中心D、高斯投影平面中心2、GPS系统的空间部分由21颗工作卫星及3颗备用卫星组成,它们均匀分布在(D)相对与赤道的倾角为55°的近似圆形轨道上,它们距地面的平均高度为20220Km,运行周期为11小时58分。
A、3个B、4个C、5个D、6个A、东8区B、西8区C、东6区D、西6区4、在使用GPS软件进行平差计算时,需要选择哪种投影方式(A)。
A、横轴墨卡托投影B、高斯投影C、等角圆锥投影D、等距圆锥投影5、双频接收机可以同时接收L1和L2信号,利用双频技术可以消除或减弱(C)对观测量的影响,所以定位精度较高,基线长度不受限制,所以作业效率较高。
A、对流层折射B、多路径误差C、电离层折射D、相对论效应6、我国自行建立第一代卫星导航定位系统“北斗导航系统”是全天候、全天时提供卫星导航信息的区域导航系统,它由(B)组成了完整的卫星导航定位系统。
手把手教你成为GPS一机多图(图)
手把手教你成为GPS一机多图DIY高手此贴目的是与菜鸟一起共同学习的科普贴。
自认为是高手的请绕道。
随着科技进步,GPS的硬件和软件的发展也日新月异。
系统越来越强大。
GPS地图品牌也琳琅满目,让人眼花缭乱。
网上的破解地图也天天更新,一机多图教程也不少。
但是很多新玩家看着这么多五花八门的教程而无从下手。
本人属于折腾一族。
在本游戏战队网站也经常折腾制作一些游戏任务与队友分享。
这次正好自己小轩也要升级GPS地图。
就借此机会与有兴趣的新手朋友们一起学习学习。
水平有限,请大家指教。
让高手见笑了。
以下内容如果你认为值得一看,就请你给个回帖以作鼓励。
请新手们认真看完教程。
相信你一晚之间就会成为玩转GPS一机多图的高手。
(只要你会基本电脑使用知识就行。
呵呵!不要告诉我你不会上网。
)先上制作好后在睛田GPS上使用的效果图(我设计了可以在GPS上更换不同的桌面风格啊~~~)一,制作一机多图的必需资料1.下载一机多图的制作程序(必需)首先要有一机多图的制作程序。
一机多图的制作程序有很多种,功能都是大同小异。
网上都有很多资料可以下载。
流行的有:MobileNavigator和navigation等。
自己上网找就行。
一机多图程序是一个多功能的GPS引导程序,里面有工具、软件、游戏、音视频播放器、导航地图等多种功能,用户只需要将相应的wince应用软件、游戏、音乐、视频放入相应的文件夹,即可以实现相应的功能。
例如:其中.MobileNavigator.exe是一机多图主启动程序.Shell.ini是程序指向配置文件.我自己用的是下面这种一机多图程序:其中.navi.exe是一机多图启动程序.sysinfosettings.ini是配置设置文件.(后面有详解)附一个一机多图程序的下载链接吧:/read.php?tid-52540-keyword-%D2%BB%BB%FA%B6%E0%CD%BC.html2.下载WINCE模拟器(必需)WINCE模拟器是一个可以在你的PC上模拟你的GPS机运行GPS地图和其它只能在WINCE操作系统下使用的程序的软件。
GPS 05 GPS卫星定位基本原理(三)
特点
优点: 实时消除误差,
实现精密定位 缺点:需要额外的接收设备
DGPS数据链
基准接收机的DGPS数据无线电发送机,与动 态接收机的DGPS数据无线电接收机,构成了 DGPS数据链
差分改正数
基准接收机
动态接收机
DGPS数据链的组成
调制解调器
无线电电台
通过RS-232-C接口与信号接收 机相连
广域差分示意图
电离层改正 卫星星历改正
卫星时钟改正
广域差分可纠正的误差种类
星历误差
依赖区域精密定轨,确定精密星历,取代广播星历
大气延时误差
通过建立精确的区域大气延时模型,能够精确地计算 出作用区内的大气时延量
卫星钟差误差
可计算出卫星钟各时刻的精确钟差
广域差分的工作流程
1) 在已知坐标的若干监测站上,跟踪观测GPS卫 星的伪距、相位等信息; 2) 将测得的伪距、相位和电离层延时的量测结果 传输到中心站; 3) 中心站计算出星历误差改正、卫星钟差改正及 电离层延迟误差改正; 4) 将上述改正数用数据通信链传输到用户站; 5) 用户利用这些改正数修正自己的观测值,计算 出精密结果。
以库尔勒、喀什、和田为监测站,构成小区域网, 选择距这一小网不同距离的四个地点作为用户位置
根据小网计算卫星相对钟差,用伪距法计算用户测 站坐标,并与国家A级点计算坐标比较
RTK 测量技术的发展
两个关键因素
1.整周模糊度的解算,即OEM板的工作性 能问题。 2.数据的传输技术即通讯方式的可靠性问 题。 数据的通讯方式决定了RTK系统的作用 距离和工作稳定性,现有的通讯方式有:
数传电台
数据质量高,但有距 离限制。 电台的能力强弱可以 直接影响到RTK的测量 效果。
GPS实验三GPS基线解算

数据格式转换
02
将原始数据格式转换为基线解算软件可识别的格式。
数据筛选与预处理
03
剔除异常数据,进行必要的坐标转换和时间对齐等预处理操作。
基线解算设置与执行
1 2
参数设置
设置基线解算所需的参数,如卫星轨道、地球模 型、时间系统等。
执行基线解算
利用基线解算软件进行数据处理,求解基线向量。
3
输出结果
将基线解算结果输出为所需的格式,如RINEX格 式。
实验结论与讨论
结论
通过本次GPS基线解算实验,我们成功得到了基线的长度和坐标差值,测量精度较高, 验证了GPS技术在测量领域的应用价值。
讨论
为了进一步提高测量精度,可以考虑采用更高精度的GPS接收器,优化数据处理算法, 以及加强信号传播过程中的干扰抑制措施。此外,还可以通过多次测量取平均值的方法
减小误差。
GpsDataPro软件应用实例
某城市高精度地形测量项目
利用GpsDataPro软件对大量GPS观测数据进行处理,得到高精度的地形图。
某桥梁施工监测项目
在桥梁施工过程中,利用GpsDataPro软件对桥梁进行实时监测,确保施工安全。
04
GPS基线解算实验步骤
数据准备与预处理
数据收集
01
收集相关GPS数据,包括卫星观测数据、接收机位置数据等。
高精度数据处理
随着数据获取技术的不断发展,未来需要更加高 效和高精度的数据处理方法,以满足更高精度的 测量和定位需求。
人工智能与机器学习应用
人工智能和机器学习技术在数据处理和分析中具 有巨大的潜力,未来将进一步探索其在GPS基线 解算中的应用,提高数据处理效率和精度。
THANKS
gps05gps卫星定位基本原理(二)
发生反射或衰减,影响定位精
的传播和接收。
度。
伪距测量及误差源
大气误差
钟差误差
大气层密度变化引起相位延迟和信号衰减,
卫星和地面的时钟时间存在微小差异,需要
会造成定位误差。
进行纠正。
不稳定性误差
多径误差
接收机的温度和电源波动等因素会影响伪距
信号反射、折射等现象,使伪距测量受到多
测量结果。
径干扰。
载波相位测量原理
1
概述
与伪距测量不同,载波相位测量利用波长计算距离,更加精确。
2
双频技术
使用L1和L2频率的信号技术
差分技术利用基准站的精确定位信息进行扩展,提高定位精度。
基于差分GPS的高精度定位技术
高精度测绘
精准农业
智能机器人
利用差分技术进行精度达数毫
利用精度较高的定位信息进行
GPS卫星定位基本原理(二)
欢迎来到本节课程,今天我们将学习GPS卫星定位的进阶知识。让我们一同
探索这一神奇技术的更多应用和原理。
GPS定位原理回顾
1
GPS接收机接收到从卫星发射出的射频信号
这些信号携带着卫星位置和时间信息。
2
接收机解码信号
计算卫星与接收机之间的距离,也称为伪距测量,因为它受到误差影响。
结合GPS定位和机器人技术,
米的地面测绘。
精准的田间作业,可以有效提
可以实现自动化操作,如航拍
高作物产量。
无人机、自动驾驶汽车等。
GPS在导航中的应用
1
汽车导航
2
户外探险
3
航空航海领域
使用GPS技术,结合地
手持GPS设备可以在户
GPS成为提高飞机和船
几何技术规范(GPS)_05_GB T 17851-2010_几何公差_基准和基准体系_上海大学_李明
组成要素: 面或面上的线
导出要素: 由一个或几个组成要素得到的中心点、中心线或中心面
如:1)球心是由球面得到的导出要素,该球面为组成要素 2)圆柱的中心线是由圆柱面得到的导出要素,该圆柱面为组成要素
上海大学 李明 (robotlib@)
5
术语与定义
拟合组成要素: 按规定的方法由提取组成要素形成的并具有理想形状的组成
上海大学 李明 (robotlib@)
11
基准的作用与应用案例
上海大学 李明 (robotlib@)
12
6
2013/11/10
基准的作用与应用案例
上海大学 李明 (robotlib@)
13
基准的作用与应用案例
上海大学 李明 (robotlib@)
要素
拟合导出要素: 由一个或几个拟合组成要素导出的中心点、轴线或中心平面
上海大学 李明 (robotlib@)
6
3
基准的建立
一个组成要素作为基准
2013/11/10
上海大学 李明 (robotlib@)
最小二乘法
7
基准的建立
一个导出要素作为基准
上海大学 李明 (robotlib@)
42
21
2013/11/10
基准及基准体系构建案例
上海大学 李明 (robotlib@)
43
基准及基准体系构建案例
上海大学 李明 (robotlib@)
44
22
2013/11/10
谢
GPS/CMM
Geometrical Product Specification and Verification
几何技术规范(GPS) GB/T 17851-2010 几何公差
定位系统

中国定位发展史
根据中国物联网校企联盟的定义,通过定位系统获取位置信息是物联化时代的重要研究课题。物联网环境下 对定位技术的挑战主要体现在:异构网络、多变环境下的精准定位;大规模应用;基于位置的服务(Location based Services);位置信息带来的信息安全和隐私保护问题。
北斗-1A 发射日期:2000年10月31日 卫星类型:北斗一号 发射地点:西昌卫星发射中心 北斗-1B 发射日期:2000年12月21日 卫星类型:北斗一号 发射地点:西昌卫星发射中心 北斗-1C
可见GPS导航系统卫星部分的作用就是不断地发射导航电文。然而,由于用户接受机使用的时钟与卫星星载 时钟不可能总是同步,所以除了用户的三维坐标x、y、z外,还要引进一个Δt即卫星与接收机之间的时间差作为 未知数,然后用4个方程将这4个未知数解出来。所以如果想知道接收机所处的位置,至少要能接收到4个卫星的 信号。
主流定位系统除美国的GPS外,还有中国的北斗卫星导航系统、欧盟的伽利略卫星导航系统、俄罗斯全球导 航卫星系统等。
全球定位系统(Global Positioning System,简称GPS)是一个由覆盖全球的24颗卫星组成的卫星系统, 是美国第二代卫星导航系统在子午仪卫星导航系统的基础上发展起来的,它采纳了子午仪系统的成功经验。和子 午仪系统一样,GPS定位系统由空间部分、地面监控部分和用户接收机三大部分组成。
历史发展
前身
中国定位发展 史
前身
GPS系统的前身为美军研制的一种子午仪卫星定位系统(Transit),1958年研制,64年正式投入使用。该系 统用5到6颗卫星组成的星网工作,每天最多绕过地球13次,并且无法给出高度信息,在定位精度方面也不尽如人 意。然而,子午仪系统使得研发部门对卫星定位取得了初步的经验,并验证了由卫星系统进行定位的可行性,为 GPS系统的研制埋下了铺垫。由于卫星定位显示出在导航方面的巨大优越性及子午仪系统存在对潜艇和舰船导航 方面的巨大缺陷。美国海陆空三军及民用部门都感到迫切需要一种新的卫星导航系统。
ITRF2005框架下GPS、VLBI和SLR地心坐标速度的精度检测
ITRF2005一SLR.SCC数据选自各数据中心提交 给IERS的ITRF2005的SSC(SLR)坐标解。解算处 理1980--2006年最近20多年的数据,这些站的地 心坐标速度的标称精度大部分优于3 mm/a。我们 选用了其中16个精度较高与ITRF2005一VLBl.SCC 并置的台站,26个与1TRF2005一GPS.SCC并置的精 度较高的台站。
的中误差,以此作为外符精度,可以看出:VLBI、GPS和SLR地心坐标速度三分量的外符精度在1 mm/a之内,SLR
与VLBI和GPS地心坐标速度的三分量的外符精度较差,而VLBI与GPS的外符精度较高。表明VLBI和GPS实现
的地心坐标速度精度比SLR高。
关键词 GPS/VLBI/SLR;地心坐标速度;坐标转换;标称精度;外符精度
表1 SLR与VLBI并置站地心坐标速度的标称精度(单 位:mm/a)
Tab.1 Nominal accuracy of geocentric velocity at same stations located parellelly with SLR and VLBI(a- nit:mm/a)
表3 VLBI与GPS并置站地心坐标速度的标称精度(单
曙日圄 (6)
坐标不符值加权中误差的计算公式为:
鼢
VxPxvx\/lpx
(7)
该值可以作为两种技术在X、y、z方向速度的 外部检核的量化精度,即外符精度。其中比、K、屹 为平差后并置站坐标的不符值,PnPnPz为每一并 置站上坐标速度不符值分量的权。
4结果分析
利用各自的并置站信息,各自的并置站地心坐 标速度计算出的标称精度如表1~3所示。
SLR与VLBI的不符值中误差在3轴方向的分 量基本上都在1 mm/a以内,因此可以认为SLR与 VLBI获得地心坐标速度的实际精度已经达到毫米 级/年。与SLR和VLBI技术获得的地心坐标速度 的标称精度基本相当。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
杨凌职业技术学院交通与测绘工程学院(系)实践性教学安排审批表2010 ~2011学年第 2 学期单及安排实施。
3.本表一式3份,除教研室、院(系)办公室,还须提前一周报教务处教务科一份,作为过程检查及期末实践教学课时计算的依据。
杨凌职业技术学院交通与测绘工程学院2010~2011学年第2学期《GPS测量技术综合实训》计划与任务书测绘09024班(第19周)2011年6月27日—7月01日;测绘09025班(第18周)2011年6月20日—6月24日;测绘09026班(第17周)2011年6月13日—6月17日;测绘09027班(第15周)2011年5月30日—6月03日;测绘09028班(第16周)2011年6月06日—6月10日;工程测绘教研室2010年4月一、实训目的全球定位系统(GLOBAL POSITIONING SYSTEM-GPS)的开发与研制,在测量界引起了极大的影响。
在我国大地测量、精密工程测量、地壳运动监测、资源勘察和城市控制测量等方面已取得了成功。
为了适应GPS卫星测量发展的需要,使学生能基本掌握GPS测量中,控制网的布设、数据的外业采集、数据的下载及后期处理的过程以及RTK测量技术的应用,特安排本次实训。
通过GPS测量的实训,使学生掌握GPS定位测量与传统测量方法的区别;掌握GPS测量的外业施测过程以及精度指标的要求;掌握数据后处理软件的使用以及控制网的平差;掌握RTK测量技术的实施等。
具体为:1.巩固课堂所学知识,进一步加深对GPS定位原理的理解,并能将理论与实践相结合。
2.训练学生GPS野外动手操作能力,熟练掌握GPS接收机的使用方法,外业观测的记录要求,选点、埋石的要求,通过实习使学生掌握GPS控制网的二级实测。
3.合理分配时段、掌握星历预报对时段的要求,PDOP值的大小对观测精度的影响,图形结构的设计及外业工作,手机或对讲机的合理应用。
4.通过对野外观测数据的采集、下载、处理,使学生掌握HD-S2003数据后处理软件的使用。
5.使学生掌握在RTK测量技术中,基准站的架设与设置,移动站的调试与安置,进行碎步测量,点的放样,线段放样,线路放样的内容。
6.通过整个实训,培养学生从事测绘工作的实际能力,养成良好的专业品质和职业道德。
7.通过GPS定位实习,将所学知识融会贯通,从外业准备工作开始,测区踏勘、资料收集、人员组织、外业观测计划,GPS网与地面网的联测方案,编写GPS技术设计书并实施。
二、时间、地点.1、具体的时间安排为:测绘09024班(第19周)2011年6月27日—7月01日;测绘09025班(第18周)2011年6月20日—6月24日;测绘09026班(第17周)2011年6月13日—6月17日;测绘09027班(第15周)2011年5月30日—6月03日;测绘09028班(第16周)2011年6月06日—6月10日;2、具体的地点在杨凌示范区市区内(见下示意图)。
三、组织与指导教师(一)组织:参加实训的师生统一组成实习队,在交通与测绘工程学院的领导下,由指导教师组成领导小组,负责全队的组织及思想教育工作。
为了便于仪器的合理利用,充分锻炼每个学生的实践能力,全班共分8个小组。
每小组设组长一名负责本小组的各项实际工作以及仪器与资料的保管工作。
实训过程中每个同学应积极完成所安排的任务。
其中1、组长:赵飞燕老师2、成员:测绘09024班(第19周):赵飞燕、张少雄、宁创刚测绘09025班(第18周):赵飞燕、黄军辉、裴斌斌测绘09026班(第17周):赵飞燕、张广东、郭新瑞测绘09027班(第15周):赵飞燕、刘恒、贺海涛测绘09028班(第16周):赵飞燕、史浩、杨飞(二)指导教师校内指导教师:赵飞燕四、实训任务及内容。
1.作业依据1.1 GPS测量规范(规程)(1)《全球定位系统(GPS)测量规范》(2)《全球定位系统城市测量技术规程》(3)各行业部门的其他GPS测量规程或细则1.2 测量任务书测量任务书或合同是测量施工单位上级主管部门或合同甲方下达的技术要求文件。
它规定了测量任务的范围、目的、精度和密度要求,提交成果资料的项目和时间,完成任务的经济指标等。
2.施测方案2.1布网方案采用8台GPS接收机,按边连式或点连与边连相结合的形式布设GPS控制网,等级为E级。
2.2 坐标系统、高程系统和时间系统GPS基线向量为WGS-84坐标系,GPS网平差成果为西安1980坐标系坐标或1954北京坐标系并转换为测区独立坐标系坐标。
高程系统采用1985国家高程基准。
时间系统采用北京时间系统。
2.3 测区已有的大地控制成果测区如有已知的国家高等级三角点,可考虑联测国家高等级点,将GPS网点的坐标转换到国家坐标系中。
如无已知的国家高等级三角点,则采用测区独立坐标系统。
2.4 起算数据本次实习GPS控制网可考虑利用国家等级点,必须有西安1980坐标系坐标或1954北京坐标系坐标,作为本次实习GPS控制网的起算数据。
如无已知的国家高等级三角点,则采用测区中任意两点的独立坐标作为本次实习GPS控制网的起算数据。
3.外业观测,GPS观测及作业要求:(1)外业作业调度安排(按实际情况另排)。
(2)GPS接收机的检验:一般检视、通电检验、实测检验。
(3)观测组严格按调度表规定的时间进行作业,保证同步观测同一卫星组。
(4)每时段开机前,作业员量取天线高,并及时输入测站名、年月日、时段号、天线高等信息。
关机后再量取一次天线高作校核,三次量天线高互差不得大于3mm,取平均值作为最后结果,记录在手簿中。
若互差超限,应查明原因,提出处理意见记入测量手簿备注栏中。
(5)仪器工作正常后,作业员及时逐项填写测量手簿中各项内容。
当时段观测时间超过60min以上,应每隔30min记录一次。
(6)一个时段观测过程中不得进行以下操作:关闭接收机又重新启动;进行自测试(发现故障除外);改变卫星高度角;改变数据采样间隔;改变天线位置;按动关闭文件和删除文件等功能键。
(7)观测员在作业期间不得擅自离开测站,并应防止仪器受震动和被移动,防止人和其他物体靠近天线,遮挡卫星信号。
(8)接收机在观测过程中不应在接收机近旁使用对讲机;雷雨过境时应关机停测,并卸下天线以防雷击。
(9)每日观测结束后,应及时将数据转存至计算机硬、软盘上,确保观测数据不丢失。
(10)记录雨、晴、阴、云等天气状况。
4.GPS网的数据处理基线数据采用HD—S2003随机软件包进行求解,用BJ-54坐标进行平差,包括数据传输、输入数据、解算基线、打印网图、检验基线闭合差、定义椭球元素、选择坐标系统、定义高斯投影、网平差。
其主要技术参数如下:卫星截止高度角≥15°,星历为广播星历,采用L1、L2双频。
五、测区概况根据实际选定实习场地,布设10个左右的GPS控制点,构建一个E级GPS 网,满足实习需要。
六、组织安排1、时间安排:实训时间为1周。
具体安排如下表:8+1套中海达GPS接收机(一套基准站,八套移动站,数据下载线):野外记录手簿。
(自备):木桩,斧子,油漆。
计算机机房一个(50台计算机)七、实训要求1、实训期间,各组组长要切实负责,合理安排本组的工作;各组间要加强团结协作,以保证实训的顺利进行。
2、实训期间,应特别注意仪器的安全使用;各组要指定专人妥善保管仪器。
3、加强组织纪律性,遵守学生守则、遵守实习制度,加强请假制度,未经指导老师和班主任同意,不得缺勤,不得私自外出,无故不请假离开实习者,以旷课论处。
4、实训中的各项工作每人都应有机会参与,得到锻炼。
5、严格依各技术要求进行测量和计算。
6、具体的仪器操作与注意事项遵照课堂实习的要求。
八、上交成果1. GPS点之记表格。
(每组一份)2. GPS外业观测记录手簿。
(每班一份)3. 控制网的计算成果资料。
(一组一份)。
4.实训报告(一人一份)。
九、成绩评定根据学生在实训中的表现,完成实际任务的数量及所交资料成果的质量,基本技能的熟练程度,独立工作能力的大小,出勤及爱护仪器情况,实习报告的质量《GPS测量技术设计书》和《GPS测量实习报告》的编写水平等内容对学生的成绩给予优,良,中,及格,不及格五个等级标准。
十、实训学生名单(参照每个班课堂实习的名单)工程测绘教研室:赵飞燕2011年4月附件:1、GPS点点之记2、GPS外业观测记录手簿3、实践教学学生评价表4、学生实习(实训)报告(封面)GPS点点之记GPS外业观测手薄测量09024—09028班GPS测量实训工程GPS外业观测手薄附件3杨凌职业技术学院院(系)实践教学效果学生评价调查表20 -20 学年第学期实训项目:实训地点:实训时间:实训班级:指导教师:评价内容:1、实训目的:□明确□比较明确□不明确2、实训要求:□具体□比较具体□不具体3、实训内容:□充实□比较充实□不充实4、指导教师:□认真□比较认真□不认真5、纪律要求:□严格□比较严格□没有要求6、安全保障:□好□较好□一般7、组织安排:□合理□比较合理□不合理8、实训环境:□良好□一般□较差9、实习收获:□大□较大□一般意见或建议:。
年月日1、此表由参加实训把经济的学生如实填写,抽样率应大于等于班级学生总数的20%2、对各项调查项目,在自己认为的情况下的“□”内打“√”。
附件4杨凌职业技术学院院(系)20 ~20 学年第学期《》实训报告班级:姓名:学号:指导老师:实训地点:完成时间:。