基于单片机的超声导盲杖设计
基于单片机技术的超声波测距盲杖的设计
基于单片机技术的超声波测距盲杖的设计摘要:超声波测距盲杖是一种盲人助行工具,可以提供距离信息,帮助盲人行走。
本文介绍了超声波测距盲杖的系统组成和工作原理,并设计了测距模块、语音提示模块、蓝牙连接模块。
其中超声波测距模块和语音提示模块是本设计的重点。
本系统采用51单片机作为主控芯片,利用超声波测距原理和语音提示功能,实现了盲人在行走过程中的实时距离监测、障碍物检测、安全警报等功能,具有成本低、体积小、可靠性高等特点。
测试结果表明,本系统测量数据准确、可靠性高、可重复性强,能够满足盲人使用需求。
关键词:超声波测距单片机语音提示1.引言根据新思界产业研究中心发布的《2021-2025年全球盲人智能助视器行业深度市场调研及重点区域研究报告》显示,在全球中,中国是盲人数量最多的国家,在2020年盲人数量约为830万人,占全球失明人口的21%左右。
而短短两年——2022年4月23日,中国盲人协会转载的人民日报发布的《喜马拉雅助力中国盲人协会,共同孵化盲人音频主播》中显示,中国约有1731万盲人,每年因盲人在日常生活中的障碍而导致的事故达10万起,由于没有必要的无障碍设施,这些盲人无法正常的出行。
因此,研究一种能够辅助盲人安全出行的工具非常有必要。
目前市面上已有很多种类的助行工具,如手杖、盲杖、导盲犬等。
但这些助行工具均存在一些不足,如价格昂贵、携带不便、使用时间短等。
基于以上因素,本文主要研究一种基于单片机开发的超声波测距盲杖。
超声波测距是一种非接触式测量方法,具有精度高、响应速度快、抗电磁干扰等优点。
利用超声波测距原理可以实现对障碍物距离的测量。
超声波测距目前在医疗上使用比较广泛。
超声波测距系统主要是利用超声波在介质中传播时遇到障碍物反射回来的时间来计算距离。
本项目在设计上主要考虑以下几点:一是采用单片机作为控制核心,利用超声波测距原理实现对障碍物距离的测量;二是通过语音提示功能实现对障碍物距离进行播报;三是设计蓝牙模块可以发送超声波所测得的距离。
基于超声波技术的导盲杖设计

六、结论 本装置结构简单、体积小、性能稳定,结合手杖让盲人使用简单、方 便,也可以安装在不同的载体上,制作成不同的用具,如导盲小车、导盲 头盔等,因而具有一定推广应用价值。由于系统具有数字和语音双重输 出功能,稍加改动,就可应用于倒车避应用设计中。
图 2 主函数流程
图 3T1 中断函数流程
图 4 外部中断 0 服务函数流程
参考文献 [1]孙传友,孙晓斌.感测技术基础(第 2 版)[M ].北京:电子工业出 版社,2006 [2]陆军,米文龙,朱齐丹,王艳.超声波测距系统在移动机器人中的 设计与应用[J].电子技术应用,2007.(6) [3]ISD 1700 系列数码语音电路使用手册.中青世纪 http://w w w . atvoc.com /
(上接第 20 页) 教师作为大学教育的主要实施者,在大学生科研与实践创新能力
培养过程中具有重要的作用。在师范背景下,机械专业教师一方面可以 积极指导学生参加学科竞赛和项目研究,另一方面,在上课教学的过程 中也要积极引导学生重视科研和实践创新能力的培养。
2.2 加大经费投入,完善硬件设备和实验场地 师范类的专业,大多不需要硬件设备支撑,但机械专业的科研与实 践需要有一个平台,因此,建设一个开放的机电类大学生创新实验室是 很有必要的,这样可以让学生有一个稳定的科研环境和互相学习的氛 围。 学校应对机械专业加大经费投入,学院应多方筹措资金,完善创新 实验室的建设,购买一批先进的实验设备,一方面加强对学生的吸引 力,激发学生的兴趣,另一方面有利于提高学生创新成果的质量。另外, 要逐步实行开放式实验室管理模式,放手让学生自主实验,这可以增强 学生的创造性,强化学生的实践动手能力。但实验室开放的同时,必须 建立与之配套的现代化教学管体系与制度,从而规范实验行为,加强实 验管理[4]。 2.3 区别于师范类专业的发展,形成具有自己特色的培养评价体系 师范类高校发展机械专业,往往容易根据师范背景的思维惯性,而 忽视了机械专业的特殊性。机械专业不同于师范类专业,它不再强调教 师技能和学生管理能力的培养,而更加重视科研实践能力的锻炼。在师 范背景下,机械专业要想更好的发展,就要形成具有自己特色的培养评 价体系,实现由注重知识传授向注重创新能力的转变[5],努力提高学生 动手能力,并转变学生的思维模式,使学生提高科研与实践能力。文献 [5]提出了机械专业人才培养的三个层次,第一层次,工程认识实践与基
智能导盲拐杖的设计毕业论文

智能导盲拐杖的设计毕业论文YUKI was compiled on the morning of December 16, 2020天津职业技术师范大学Tianjin University of Technology and Education 毕业论文专业:班级学号:学生姓名:指导教师:二〇一三年六月天津职业技术师范大学本科生毕业设计基于单片机电子导盲拐杖设计Electron blind-guide crutch design based on MCU 专业班级:学生姓名指导教师:学院:电子工程学院2013年06月摘要随着社会的发展,在社会生活中应用超声波测距技术已很广泛,如汽车倒车雷达、测距仪和物位测量仪等都可以通过超声波来实现。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声测距技术的研究和开发具有实际意义。
本设计研究为盲人提供行走时,遇到前方障碍物提前躲避的预警系统。
以AT89S52作为核心处理器,采用超声波回波时间差测量人与物体之间的安全距离,实现了提前预警使用者避让障碍物,起到避免安全隐患的作用。
该系统是基于AT89S52单片机的超声波测距系统,它根据超声波在空气中传播的反射原理,以超声波传感器为检测部件, 应用超声波在空气中传播的时间差来测量距离。
夜晚时利用光敏传感器控制警示灯开关,警示来往车辆避让。
另有时间播报功能。
主要由测距系统(包括超声波发射模块、超声波接收模块)和语音报警系统,时间播报系统,警示灯控制系统,稳压电源,五个主要模块构成。
该设计利用AT89S52单片机系统的I/O口,控制超声波传感器发出40KHz的超声波,利用反射回来的超声波信号,经过放大、整形、滤波等电路回到单片机,比较调试后确定与障碍物之间的距离,完成测距。
该装置将单片机的实时控制及数据处理功能,与超声波的测距技术、传感器技术相结合。
语音系统发出警示音,提醒使用者前方障碍物需躲避。
使盲人在看不见的情况下,能够识别前方的障碍物正常的行走,从而起到保护盲人安全的作用。
基于单片机的智能拐杖硬件设计
基于单片机的智能拐杖硬件设计摘要伴随着我国科学技术和制造业的快速的壮大,人们在平常的生活和工业生产活动中使用智能设备控制技术的应用也随之广泛,不但节省了人力资源,而且很大程度上提高了人们生活生产的效率,既促进了科学技术的飞速发展,又不断地丰富着人们的生活。
导盲设备的研发一直是各国科研的一个重点,不仅是因为它有重大的社会意义,还因为它对于机器人视觉等多个研究领域有着不小的研究意义,能够给人类提供道路信息的导盲设备,在自动化机器人上也能起到同样的效果。
有许多研究已经有了成功的案例。
本设计采用STC89C51单片机作为主控板,HC-SR04超声测距传感器作为探测装置,达到导盲的效果。
这款仪器结构简单,功能可靠,它可以对前方的障碍物进行探测,在达到预设范围时蜂鸣器会提醒使用者小心障碍物,从而达到智能导盲的效果。
关键词:STC89C51单片机 HC-SR04超声测距传感器智能拐杖Intelligent crutches hardware design based on SCMAbstractWith the continuous development of science and technology and manufacturing in China, people use in everyday life and industrial production automation control technology has been widely applied, not only save the human resources, and greatly improve the people's life the efficiency of production, not only promoted the rapid development of science and technology, and constantly enrich people's life.The research and development of guide for the blind has always been a focus of scientific research in various countries, not only because it has great social significance, but also because it has great research significance in many research fields such as robot vision. The guide equipment that can provide road information to humans can also play thesame role in automated robots. There have been many successful studies. This design USES stc89c51 microcontroller as the main control board, hc-sr04 ultrasonic ranging sensor as the detection device, to achieve the effect of guide for the blind. This instrument is simple in structure and reliable in function. It can detect obstacles in front of it. When reaching the preset range, the buzzer will remind the user to be careful of obstacles, thus achieving the effect of intelligent guide for the blind.Keywords:STC89C51 SCM HC-SR04 ultrasonic ranging sensor目录1前言 (3)1.1研究背景与意义 (3)1.2在国内外的发展概况及分析 (4)1.2.1导盲杖 (4)1.2.2导盲眼镜 (5)1.2.3触觉鞋与智能手机 (5)1.2.4现状分析 (6)1.3本设计应解决的主要问题 (8)2本设计 (8)2.1本设计设计原理 (8)2.1.1单片机基本介绍 (8)2.1.2引脚功能介绍 (9)2.1.3超声波测距和光学测距的分析对比 (11)2.2本设计方案选择 (13)2.2.1硬件部分 (13)2.2.2Keil软件 (15)2.2.3软件程序主要部分及编写思路 (16)2.2.4测试数据 (20)3.结论 (21)4参考文献 (22)5谢辞.............................................. 错误!未定义书签。
基于STM32单片机的多功能智能盲人拐杖设计

基于 STM32 单片机的多功能智能盲人拐杖设计摘要:针对盲人出行安全问题,设计一款解决盲人出行困难的智能拐杖。
本设计以 STM32 单片机为控制核心,结合当前先进且较为成熟的信号处理算法、传感器技术、无线通信技术,通过超声波模块进行广角测障利用语音播报模块报警,引导盲人及时规避障碍物。
同时采用 MPU6050 水平检测模块监测拐杖与地面的倾角,在出现突发情况时,不仅可以通过语音模块识别求救,还可以用短信的方式将GPS的实时定位位置发送给监护人。
此外,采用OPENMV 4进行机器视觉图像分析,使拐杖能对外界变动的信息做出应答,为盲人通过路况复杂的红绿灯路口提供保障。
现测试结果表明,整个系统性能稳定,灵敏度较高,操作方便,且功能易于扩展,能满足盲人出行的多方面需求。
关键词:盲人拐杖;红绿灯识别;超声波测距;跌倒报警项目名称:“无忧出行”智能盲人手杖装置设计,项目编号:202010214020,国家级大学生创新训练项目1概述针对盲人出行安全问题,现有的辅助盲人出行工具性能单一且无法普及,设计智能盲人手杖可以帮助更多盲人实现安全出行。
随着信息化社会的飞速发展,在基本满足了大众的物质需求后,人们也更加关注社会残障群体。
相比于正常人,残障人士的生活有诸多的不便,更需要社会对他们的理解与关注。
针对盲人出行安全问题,现有的辅助盲人出行工具性能单一且无法普及,设计了一款基于STM32单片机控制的集超声波测障、语音播报、红绿灯识别、短信报警、GPS定位等功能于一体的智能拐杖系统, 能够实时监测周边情况, 保护老人安全出行。
2系统总体设计单片机实时监控测距模块传送来的信号,对信号处理后,进行避障决策判断。
当检测到障碍物时,手杖自动报警(语音和机械振动双重模式)提示盲人避障。
同时,用图像分析技术识别并筛选外界信息,构造合理的内部控制逻辑,组建红绿灯决策功能,另外,还有一键求助和黑夜防撞等特色功能,进一步提高盲人出行安全系数。
基于STM32的智能导盲杖的设计
第43卷第5期2020年10月电子器件ChineseJournalofElectronDevicesVol 43㊀No 5Oct.2020项目来源:北京工业职业技术学院重点科研课题项目(BGZYKY201820Z)ꎻ中国农业大学烟台研究院科研基金项目(YT201805)收稿日期:2020-03-28㊀㊀修改日期:2020-05-10DesignofIntelligentBlindGuideStickBasedonSTM32∗SONGYu e1ꎬLIUYehui1ꎬZHANGXiaoyan1ꎬWANGChengguo2∗ꎬLINHaonan1(1.SchoolofElectricalandInformationEngineeringꎬBeijingPolytechnicCollegeꎬBeijing100042ꎬChinaꎻ2.YantaiAcademyꎬChinaAgriculturalUniversityꎬYantaiShandong264670ꎬChina)Abstract:InordertofacilitatethetravelofblindpeopleꎬthispaperdesignsanewtypeofintelligentblindguidestickbasedonSTM32developmentboard.Theblindguidestickusesultrasonicsensorꎬtemperaturesensorandwaterdetectionsensortodetecttheinformationofobstaclesꎬambienttemperatureandhumidityꎬroadareaandwaterconditionsrespectivelyꎬandbroadcastthecorrespondingcontenttotheblindbythevoicebroadcastmodule.Itusestheluminancesensortomeasurethesurroundinglightconditionsꎬandturnonthelightautomaticallyaccordingtotheluminancevaluetoremindotherstoavoidtheblind.Theblindguidestickhascompletefunctionsꎬlowpowerconsumptionꎬconvenientuseꎬandcanbringgreaterconveniencefortheblind.Keywords:ultrasonicsensorꎻSTM32ꎻblindguidestickꎻtemperaturesensorꎻwaterdetectionsensorꎻluminancesensorEEACC:8380㊀㊀㊀㊀doi:10.3969/j.issn.1005-9490.2020.05.042基于STM32的智能导盲杖的设计∗宋玉娥1ꎬ刘业辉1ꎬ张小燕1ꎬ王承国2∗ꎬ林豪男1(1.北京工业职业技术学院电气与信息工程学院ꎬ北京100041ꎻ2.中国农业大学烟台研究院ꎬ山东烟台264670)摘㊀要:为方便盲人出行ꎬ基于STM32开发板设计了一款新型的智能导盲杖ꎮ该导盲杖利用超声波传感器㊁温度传感器及积水探测传感器分别探测盲人前方障碍物㊁环境温度㊁路面积水情况等信息ꎬ并通过语音播报预警信息反馈给盲人ꎮ利用光照度传感器测量周围光线情况ꎬ根据光照度值自动打开灯光ꎬ提醒他人避让盲人ꎮ该导盲杖功能齐全㊁耗电量低㊁使用方便ꎬ可为盲人的出行带来更大的便利ꎮ关键词:超声波传感器ꎻSTM32ꎻ导盲杖ꎻ温度传感器ꎻ积水探测传感器ꎻ光照度传感器中图分类号:TP23㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀文章编号:1005-9490(2020)05-1180-05㊀㊀据调查ꎬ目前我国有盲人1700多万ꎬ是世界上盲人最多的国家ꎬ并且盲人人数每年都在增加ꎮ由于视力问题ꎬ盲人最大的问题是出行难ꎮ目前ꎬ引导盲人行走的方式主要有3种:(1)传统的手杖引导ꎻ(2)盲道引导ꎻ(3)导盲犬引导[1]ꎮ传统的手杖引导通过敲击地面告知盲人前方是否为可行路线ꎬ这种方式无法告知盲人周围障碍物的空间分布和距离ꎻ盲道引导存在一定的局限性ꎬ可能被占用或损坏ꎻ而导盲犬的培训周期长ꎬ成本很高ꎮ目前ꎬ我国盲人出行普遍使用的是简单的传统手杖引导ꎬ但由于缺陷很多已不能满足盲人的出行需求ꎮ部分学者也设计出了智能导盲杖㊁智能手杖[2-5]ꎬ主要利用超声波测距来识别前方的障碍物和进行位置定位ꎮ这类导盲杖能够在一定程度上帮助盲人避让前方障碍物ꎬ但如果是面部的障碍物(如悬空的广告牌㊁倾斜的树木等)则无能为力ꎮ因此ꎬ设计出一款可测量盲人前方上下障碍物距离㊁及时提醒盲人避让障碍物㊁并能适合盲人夜间行走的手杖已迫在眉睫ꎮ1㊀导盲杖的功能设计设计的导盲杖选用STM32F系列单片机为微控制器(MicrocontrollerUnitꎬMCU)ꎬ可实现以下功能:(1)在导盲杖的上部和底部分别设置超声波传感器ꎬ利用超声波测距原理分别测得盲人面部和脚底离障碍物的距离ꎬ并将障碍信息通过语音播报传递给盲人ꎻ(2)在导盲杖上设置温度传感器ꎬ利用温度传感器测量环境温度ꎬ并语音播报给盲人ꎬ为盲人增减第5期宋玉娥ꎬ刘业辉等:基于STM32的智能导盲杖的设计㊀㊀衣物提供参考ꎮ(3)在导盲杖上设置光照度传感器ꎬ利用光照度传感器测量环境光照强度ꎻ当光照强度小于某个阈值时自动打开导盲杖上的照明LED灯带ꎬ以便引起行人及车辆注意ꎬ进而避让盲人ꎮ(4)在导盲杖底部安装积水探测传感器来检测路面是否有积水ꎬ如果有积水ꎬ则进行蜂鸣器报警ꎬ进而使盲人躲避积水ꎮ在以上各功能的基础上ꎬ得到智能导盲杖的原理结构图如图1所示ꎮ图1㊀智能导盲杖原理结构图2㊀智能导盲杖的硬件设计2.1㊀微处理器在本文设计的导盲杖中ꎬ单片机选择STM32F103微处理器ꎬ该开发板具有较低的系统功耗㊁可供选择的引脚数目ꎬ价格便宜ꎬ既能满足需要ꎬ又能降低导盲杖成本[6]ꎮ2.2㊀导盲杖杖体设计导盲杖杖体采用轻便的铝合金材质ꎬ分上下两部分ꎬ均采用可伸缩设计ꎬ以适应不同身高的盲人ꎬ展开最大高度为1.8mꎬ最小高度为1.2mꎬ可适用于2m以内的盲人ꎮ杖体上下两部分用手柄连接ꎬ手柄用于盲人抓握导盲杖ꎬ内嵌微处理器㊁电源模块㊁光强度检测模块㊁温度检测模块㊁语音模块等ꎮ手柄上部30cm㊁下部30cm杖体不可伸缩ꎬ分别镶嵌红色LED灯带ꎬ光线不足时亮起ꎬ以提醒行人及车辆避让盲人ꎮ杖体中空设计ꎬ内部用杜邦线连接上部的超声波模块㊁下部的超声波模块和积水探测模块ꎬ同时节约成本和减轻整体重量ꎮ由于杖体可伸缩ꎬ故内置连线长度设置为杖体最大高度ꎮ2.3㊀超声波测距模块超声波测距模块选择HY-SRF05ꎬ用于测量盲人与障碍物之间的距离ꎮ模块具有2cm~450cm的非接触式距离感测功能ꎬ测距精度可达高到3mmꎮ模块包括超声波发射器㊁接收器与控制电路[7]ꎮ测距时:(1)首先采用IO口Trig触发测距ꎬ给予至少10μs的高电平信号ꎻ(2)模块自动发送8个40kHz的方波ꎬ自动检测是否有信号返回ꎻ(3)有信号返回时ꎬ通过IO口Echo输出一个高电平ꎬ高电平持续的时间即为超声波从发射到返回的时间ꎮ测试距离设为Sꎬ高电平时间设为Tꎬ声速为340m/sꎬ则S=T∗340/2(1)HY-SRF05超声波模块及各引脚作用分别如图2㊁表1所示ꎬ需要两个超声波模块ꎬ分别置于导盲杖的底部和顶部ꎬ都可调节高度ꎮ底部的模块根据需要可调至距离最低端10cm至70cm处ꎬ面部的模块可调节至面部高度ꎬ分别用以检测人的脚部和面部的障碍物ꎮ图2㊀超声波模块实物图表1㊀超声波模块各引脚作用引脚序号英文缩写作用1Vcc电源端2Trig控制端3Echo接收端4OUT开关量输出端5GND公共地2.4㊀语音合成模块及功放模块语音合成模块选择一款高性价比的中文语音合成芯片模块XFS3031CNP-EVBꎮ芯片模块可以通过UART接口接收待合成的文本ꎬ把文本合成为语音输出ꎮ导盲杖选择异步串口UART接收数据ꎮ芯片模块支持任意中文文本的合成ꎬ可以采用GB2312㊁GBK㊁BIG5和UNICODE四种编码方式ꎬ并支持英文字母的合成ꎬ遇到英文单词时按字母方式发音ꎮ芯片模块具有智能的文本分析算法ꎬ对常见的数值㊁电话号码㊁时间日期㊁度量衡符号等格式的文本ꎬ并能够根据内置的文本匹配规则进行正确的识别和处理ꎮ本1811电㊀子㊀器㊀件第43卷设计采用LM4990组成的功放电路对声音信息进行放大ꎮ整个语音合成系统结构框图如图3所示ꎮ图3㊀XFS3031CNP语音合成系统构成框图2.5㊀温度传感器模块本系统中采用DHT11数字温湿度传感器ꎬ它是一款含有已校准数字信号输出的温湿度复合传感器ꎮ其精度为温度ʃ2ħꎬ温度0~50ħ[8]ꎮ它应用专用的数字模块采集技术和温湿度传感技术ꎬ确保产品具有极高的可靠性与卓越的长期稳定性ꎬ超小的体积㊁极低的功耗ꎬ信号传输距离可达20m以上ꎬ产品为4针单排引脚封装ꎮ电路图如图4所示ꎮ图4㊀DHT11数字温湿度传感器典型电路图2.6㊀光照度采集模块及灯带光照度采集模块采用BH1750光照传感器ꎬ一种用于两线式串行总线接口的数字型光强度传感器集成电路ꎬ采用标准的I2C总线传输方式ꎮ利用它的高分辨率可以探测较大范围的光强度变化(1-65535lx)ꎬ具有接近视觉灵敏度的光谱灵敏度特性ꎬ且对光源依赖性弱[9]ꎮ结构框图如图5所示ꎮ图5㊀BH1750结构框图从结构框图可容易看出ꎬ外部光照被接近人眼反应的高精度光敏二极管PD探测到后ꎬ通过集成运算放大器将PD电流转换为PD电压ꎬ由模数转换器获取16位数字数据ꎬ然后被逻辑和IC界面进行数据处理与存储ꎮOSC为内部的振荡器提供内部逻辑时钟ꎬ通过相应的指令操作即可读取出内部存储的光照数据ꎮ数据传输使用标准的I2C总线ꎬ按照时序要求操作起来也非常方便ꎮ灯带采用发红色光的LED灯带ꎬ内嵌于杖体ꎬ杖体挖孔ꎬ露出灯珠ꎬ以便透光ꎮ2.7㊀积水探测传感器模块积水探测传感器模块选择物美价廉的电极式积水探测传感器ꎬ它基于液体导电原理ꎬ用电极探头探测是否有水存在ꎬ一般有两个或者三个探头ꎮ当有水时ꎬ由于液体导电ꎬ探头之间形成通路ꎬ再用控制器转换成开关量输出信号启动报警器ꎮ由于目前很多积水探测模块自带报警器ꎬ故不需微处理器控制ꎬ可供电单独使用ꎮ选择市面上已有的带蜂鸣器报警的积水探测传感器ꎬ将电源线接入电池模块ꎬ设置于导盲杖的底端ꎬ离地面1cm处ꎮ2.8㊀底部卡轮设计盲人使用普通的导盲杖时ꎬ一般倾斜导盲杖ꎬ并通过敲打地面掌握障碍物信息ꎬ长时间使用会使得手臂酸痛ꎮ倾斜的导盲杖上安装超声波测距模块ꎬ会使得模块发出的波的方向向上倾斜ꎬ不能平行于地面ꎬ这样会导致测距不准ꎮ同时ꎬ为方便盲人使用导盲杖ꎬ可以远距离行走ꎬ本设计将导盲杖底端普通的点触头替换成凹槽卡轮ꎬ其宽度略大于盲道单个突起宽度(轮距60mm)ꎬ见图6ꎮ使用时盲人手推导盲杖ꎬ使导盲杖垂直于地面从而达到能够在盲道上大体沿直线行走ꎬ轻便省力ꎬ不用刻意维持方向ꎬ防止走偏[10]ꎮ图6㊀导盲杖卡轮2.9㊀电源模块导盲杖采用9V的可充电电池供电ꎬ以节约成本ꎮ同时ꎬ通过电压转换模块把9V电压转换成各模块和传感器需要的5.0V或3.3V电压ꎮ由于不需要随时检测环境温度㊁光照度和路面积水情况ꎬ在向温度传感器㊁光照度传感器㊁LED灯带㊁积水探测传感器等模块供电时ꎬ分别设置按键开关ꎬ控制各模块电源的通断ꎮ如在想要检测环境温度时ꎬ就可以按下电源ꎬ给温度传感器供电ꎬ在程序控制下即可进行温度检测ꎮ2811第5期宋玉娥ꎬ刘业辉等:基于STM32的智能导盲杖的设计㊀㊀3㊀软件设计软件设计采用Keil5软件开发工具ꎬ使用C语言编写程序ꎮKeil提供了包括C编译器㊁宏汇编㊁链接器㊁库管理和一个功能强大的仿真调试器等在内的完整开发方案ꎬ通过一个集成开发环境(uVision)将这些部分组合在一起ꎬ生成的目标代码效率非常之高ꎬ多数语句生成的汇编代码很紧凑ꎬ容易理解[11]ꎮ软件设计主要包括主程序㊁超声波测距子程序㊁光照度采集子程序㊁温度采集子程序及语音播报子程序组成ꎮ当面部超声波测量障碍物距离小于等于1.5m时ꎬ语音播报 请注意ꎬ面部有障碍物 ꎻ当底部超声波测量障碍物距离小于等于1.5m时ꎬ语音播报 请注意ꎬ底部有障碍物 ꎻ当按下温度传感器的电源开关后ꎬ温度传感器测量温度ꎬ语音播报测得的实时温度ꎬ之后可关掉温度传感器的开关ꎬ不再测温ꎮ白天时光线一般比较充足ꎬ可以选择关闭光照度传感器的电源开关ꎻ晚上或阴天光线不足时ꎬ打开光照度传感器的电源开关ꎬ测量环境光照度ꎬ当光照度小于等于30lx(路灯照度标准)时[12]ꎬ杖体上的LED灯带亮起ꎬ提醒行人及车辆及时避让盲人ꎮ在所有模块电源都打开的情况下ꎬ整个设计程序执行一次的流程图如图7所示ꎮ图7㊀系统的软件程序流程图4㊀测试结果及结论本设计经过电路实现后(见图8)ꎬ进行了相应的模拟实验ꎬ选择两边都有教室的走廊为实验场地ꎬ测试者手持木板充当障碍物ꎮ试验者蒙住眼睛手持导盲杖向前走ꎬ导盲杖在距离前方面部障碍物和底部障碍物小于等于1.5m的时候发出相应的语音警告ꎮ测试者关闭两侧的教室门和走廊灯源ꎬ光线比较弱ꎬ当光强度值小于30lx的时候LED灯带亮起ꎬ路人很容易看到了盲人并避让ꎮ试验者按下温度传感器电源ꎬ语音播报了现场的环境温度ꎬ关闭温度传感器电源ꎬ不再播报ꎮ在地面洒上水后ꎬ水少不报警ꎬ有1cm的积水后报警ꎮ图8㊀导盲杖简易图3811电㊀子㊀器㊀件第43卷㊀㊀模拟实验验证了导盲杖的实用性和可操作性ꎬ证明该导盲杖可有效引导盲人避开上下障碍物ꎬ提醒行人及车辆避让盲人ꎬ检测温度及路面积水情况ꎬ大大方便了盲人的出行ꎮ参考文献:[1]㊀毛达许ꎬ程海玉.基于超声波的盲人导盲系统的设计[J].科技世界ꎬ2015ꎬ18:131.[2]孙二杰ꎬ汪东军ꎬ石震ꎬ等.超声波智能导盲杖的设计[J].计算机系统应用ꎬ2015ꎬ8:273-276.[3]张仁朝ꎬ王高原ꎬ罗政杰.基于单片机控制的智能导盲杖设计[J].电子制作ꎬ2019ꎬ21:31-33.[4]张昂ꎬ黄立勤.基于机器视觉的导盲杖辅助识别系统设计[J].贵州大学学报(自然科学版)ꎬ2019ꎬ36(6):63-67.[5]赵志杰ꎬ何赫ꎬ王延文ꎬ等.多功能北斗智能手杖的研究与设计[J].电子器件ꎬ2018ꎬ41(6):1622-1626.[6]缪燕.基于STM32F103的噪声频谱分析仪软件系统设计实现[D].长沙:湖南大学ꎬ2013.[7]陈骏.基于超声波测距与控制的运动实验平台研发[D].南京:南京邮电大学ꎬ2017.[8]韩丹翱ꎬ王菲.DHT11数字式温湿度传感器的应用性研究[J].电子设计工程ꎬ2013ꎬ21(13):83-85ꎬ88.[9]王伟ꎬ施六林ꎬ王斌.基于单片机的桑蚕养殖智能实时监控系统设计[J].中国农机化学报ꎬ2017ꎬ38(04):109-112.[10]王飞ꎬ杜向阳.基于keil软件的一体化螺丝刀控制器设计[J].软件ꎬ2019ꎬ40(9):76-80.[11]张靖雪ꎬ许泽天ꎬ胡沛.智能便携导盲杖设计[J].科技风ꎬ2017ꎬ2017(12):1-2.[12]CJJ45 2015.城市道路照明设计标准[S].北京:中国建筑工业出版社ꎬ2015.宋玉娥(1981 )ꎬ女ꎬ汉族ꎬ山东曹县人ꎬ北京工业职业技术学院ꎬ博士ꎬ副教授ꎬ主要研究方向为分数阶傅里叶变换㊁线性正则变换基础理论及其在雷达信号处理领域中的应用ꎬaeaeae623@163.comꎻ王承国(1981 )ꎬ男ꎬ通讯作者ꎬ汉族ꎬ山东烟台人ꎬ中国农业大学烟台研究院ꎬ博士ꎬ副教授ꎬ主要研究方向为智能控制与农业信息化技术ꎬwangcg@126.comꎮ4811。
基于单片机的超声导盲杖设计
价值工程0引言盲人作为特殊的群体,其借助的辅助工具主要有手杖和导盲犬,其中使用手杖最为普遍。
传统的盲人拐杖是一根长杆,存在一系列的不足。
例如:探测的距离受限于拐杖的长度;难于探测悬挂的障碍物;无法对快速接近的障碍物发出预先报警;公共场合不利于收藏等。
为了更好地帮助盲人行走,国内外很多机构都研究和生产了相关电子导盲装置,由于利用了GPS 全球定位系统及建立无线电基站等方法,导致用这些方法实现的导盲器价格昂贵,不适合于普通消费者。
导盲犬则价格更高,并且在某些社交场合(例如禁止宠物进入)不适合使用,造成导盲犬无法普及。
本文构思设计一种能辅助盲人安全行动的智能拐杖,该拐杖可以对前方一定距离的障碍物进行探测,并给出警报提示,从而对视力存在缺陷者提供较好的辅助行走功能。
该设计采用基于超声波传感器,以单片机为主控芯片,利用超声波测距原理辅助盲人行走,使用简单方便,具有方向性强、能量易于集中、传播距离较远,以及对障碍物定位具有一定的精确性,体积相对较小、方便携带、价格低廉等特点。
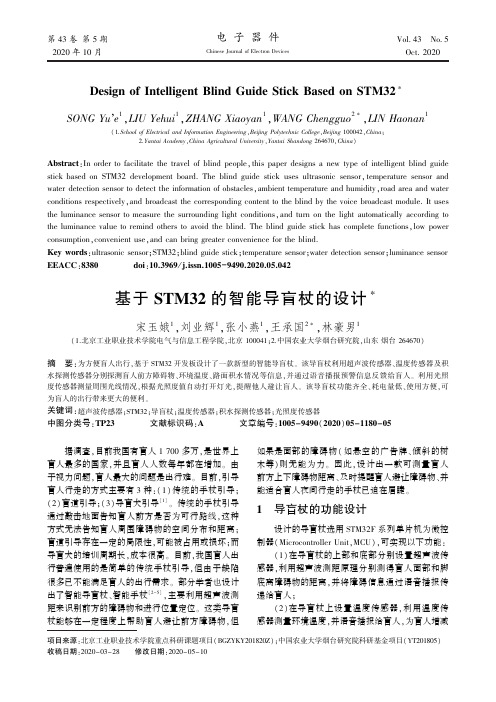
1系统的硬件结构及基本功能本设计主要分为主控模块、超声波测距模块和报警模块三个部分。
首先由超声波传感器发射端产生一个高频的超声波,然后接收端接收到这个回波,通过计算传感器发送信号和接收信号的时间间隔来确定对象的距离,最后通过对距离的判断发出警报信号,实现智能导盲的作用。
硬件的整体结构如图1所示。
1.1超声波测距模块应用超声波脉冲回波法测距的过程是:用持续时间一定的超声频高压电脉冲信号激励超声换能器,使之向外部介质发送一串超声波,当超声波在换能器的声轴上遇到一个或多个目标时,部分声能将被反射回来并作用在换能器上,使换能器输出微弱的电信号。
该信号经过放大滤波后,送入微处理系统进行信息处理,以判定回波信号出现的时刻,并计算出超声波的射程时间及对应的目标距离,从而完成了一个测距周期。
本设计中的测距模块采用收发分体式,由一对超声传感器组成,超声波发射电路主要由反相器74LS04和超声波发射换能器T 构成,由主控模块向超声波的发射端送出固定频率(40kHz)的脉冲信号,在发射端经一级反向器后送到超声波换能器的一个电极,将电脉冲信号转成超声波发射出去,若前方有障碍物存在,超声波接收端将收到的一部分反射回波转为电信号,该信号经放大后送至主控模块的另一路,被主控模块接收后计算回波时间,从而计算出障碍物的距离。
基于单片机的智能导盲杖的设计思路

基于单片机的智能导盲杖的设计思路
基于单片机的智能导盲杖是一种辅助视障人士行走的设备。
其设计思路主要包括以下几个方面:
1. 障碍物探测:通过使用传感器(如超声波传感器、红外线传感器等),检测周围环境中的障碍物,并根据检测结果发出警告信号,提醒使用者注意避让。
2. 定位导航:利用全球卫星定位系统(如GPS)和地图数据,通过单片机计算当前位置和目标位置之间的路线,并通过语音或震动等方式指引使用者前进方向,帮助其到达目的地。
3. 声音识别:通过声音传感器,识别周围环境中的重要声音,如交通信号灯的声音、车辆的鸣笛声等,以提醒使用者行进中的安全问题。
4. 蓝牙连接:与智能手机或其他设备进行蓝牙连接,可以实现远程遥控、数据传输等功能,方便使用者与其他人进行沟通或获取更多信息。
5. 指纹识别:为了确保只有授权的人员可以使用该导盲杖,可以集成指纹识别模块,对使用者进行身份验证。
6. 电源管理:为了延长电池寿命,可以设计省电模式,或者采用可充电电池,并提供低电量提示功能,以便及时更换电池。
这些是基于单片机的智能导盲杖的设计思路,通过集成多种传感器和功能模块,帮助视障人士在行走中更加安全和自信。
同时,还可以根据实际需求添加其他功能,如语音识别、避障算法优化等,以进
一步提升导盲杖的实用性和智能化水平。
基于单片机的超声波导盲杖设计研究
科技信息- 136 -世界上视觉障碍者数量众多,如何安全行走,是盲人生活中最大的问题。
传统的手杖使用起来有诸多不便,导盲犬的训练周期过长且价格较贵,不利于普及。
随着计算机技术、自动化技术及工业机器人的不断出现,测距与识别技术在工业中已经得到了普遍的发展,把这种非接触式检测与识别技术应用于民用领域变得十分重要。
如果采用超声检测的方法实现对障碍物的识别,同时将这一项技术应用于导盲产品中将有广阔的发展前景。
本设计是一种基于超声波测距技术,以AT89S51单片机为核心的低成本、高精度智能导盲杖。
整个系统包括主控制器、超声波发射器、超声波接收器、语音播报模块、电源、开关、拐杖把和拐杖体。
系统采用AT89S51作为主控制器,主要是利用超声波测距技术,在遇到障碍物时,获得障碍物的距离信息,通过单片机控制语音模块,从而发出不同的报警录音,达到导盲的作用。
1.系统的总体构成系统主要由一个主控制器、三对超声波测距模块和一个语音报警模块及振动模块组成。
系统工作时三对超声波测距模块对三个不同方向的障碍物距离进行巡回检测,再将采集到的信息送微处理器处理,微处理器再通过语音模块告知使用者安全的行进方向。
其系统总体框图如图1。
图1 系统原理图2.系统的硬件部分超声波导盲杖的设计系统共包括单片机控制电路、超声波发送超声波、接收电路和语音播报电路等四部分的硬件电路,其中单片机模块由AT89S51单片机及其外围电路组成,是整个超声波测距仪的核心电路。
2.1单片机控制电路AT89S51是一种低功耗、高性能CMOS8位微控制。
超声信号的工作频率为40 KHz,首先由AT89S51产生3路40 KHz 的方波信号通过换能器分别输送到手杖末端的3个超声探头。
在导盲杖工作时16个周期的超声波信号首先由第一个探头先发出,发出一段时间之后开始接收回波信号,接收到的回波信号先经比例放大后变成较大的回波信号,再通过自动增益控制部分,使信号放大成为能够被单片机识别的信号,经过低通滤波之后再送入单片机,然后再由第二个超声探头发送16个周期的超声信号,用和第一个同样的方式接收处理,然后是如此循环发送接收第三个、第一个……如果将两个探头发送时间间隔定为18.5ms,这样去除发送超声波的时间、处理信号的时间和消除余震的时间,总计约2.9ms,余下的15.6ms 则用来接收反射回来的回波信号,能够测得34cm ~3m 内的障碍物。
大学毕业设计---基于单片机的盲人蔽障器
基于单片机的盲人避障器摘要:由于盲人在走路的时候没有办法知道前方有没有危险,这个问题给他们的生活带来了很多的不方便。
针对这类问题本文设计了一个由单片机控制的盲人避障器,这个器件装置具有语音提醒和报警的功能。
该方案的原理是探测前方一定范围内没有任何障碍,根据发送和接收超声波如果有,那么语音提示模块可以发出声音,按钮可以播放的距离。
当距离达到10cm时,蜂鸣器会报警提醒,如果有障碍物快速靠近的时候语音会发出“危险请躲避”的声音。
关键词:AT89S52 HY-SRF05 语音芯片ISD1420Blind avoidance device based on micorocontroller Abstract: Since there is no way to know ahead the Blind whether there are obstacles in the process of walking,this issue has brought to their lives a lot of inconvenience.For this problem ,a obstacle-avoidance device was designed,which is based onprinciple of the program is based on transmitting and receiving ultrasonic probe to the front there exists a range of obstacles.If having,then the voice will sound to remind module, After pressing the button,it can broadcast the distance,when the distance is less than 10cm,Buzzer will alarm to remind,If there is an obstacle when approaching fast,then the voice will issue a “dangerous,please avoid”.This design uses A T89S52 microcontroller as the core of the low-power, high-performance, high-precision Ultrasonic Ranging display hardware and software design. The main chip ultrasonic ranging module HY-SRF05, voice chip ISD1420.Keywords:AT89S52 HY-SRF05 V oice remind ISD1420目录第1章绪论 (1)1.1设计的目的和意义 (1)1.2盲人避障器的研究前景 (2)第2章设计所用的主要技术 (3)2.1硬件技术 (3)2.2软件技术 (3)第3章硬件部分 (4)3.1总体框架 (4)3.3 系统的软件流程图 (4)3.4 系统各个模块的设计 (5)3.4.1 超声波测距模块 (5)3.4.2语音模块设计 (7)3.4.3单片机模块设计及应用 (10)3.4.4 液晶显示模块LCD1602 (14)3.4.5整个硬件电路的电路图和实物图 (15)第四章软件部分 (16)4.1主程序的流程图和过程 (16)4.2 子程序流程 (17)第五章总结 (21)第六章致谢 (22)参考文献 (23)第1章绪论1.1设计的目的和意义日常生活中,盲人在各个方面都有很多的不方便,在行走过程中也只能通过触觉来感知前方是否存在障碍物,这样就很容易遭遇危险,面对这种现实的问题,本次设计了一个由单片机控制的盲人用来躲避障碍物的器件。
基于单片机的智能盲人手杖 (修改)

利用超声波传感器实现测距功能:探测前方障碍物距离,并将数据传输给单片机进行处理
利用语音合成芯片实现语音提示功能:为用户提供方向、距离等信息
通过 GPS 模块实现定位功能:将手杖位置信息传输给手机APP,方便用户了解行进路线
采用红外传感器实现避障功能:当探测到前方有障碍物时,通过单片机控制手杖自动转向避让
基于stm32单片机的智能盲人手杖
-
项目背景
技术方案
软件设计
4
6
项目目标
硬件设计
项目成果
2
目录
1
3
5
01
项目背景
项目背景
随着科技的发展,人类生活的智能化越来越普遍
1
2
3
4
+
然而,传统的盲人手杖功能较为单一,无法满足日益多样化的需求
对于视障人群,他们需要依靠手杖来探测周围环境
因此,开发一款基于 STM32 单片机的智能盲人手杖,可以为视障人群提供更全面、更安全的服务
01
项目目标
项目目标
开发一款基于 STM32 单片机的智能盲人手杖
实现超声波测距、红外避障、GPS定位、语音提示等功能
通过蓝牙技术将手杖与手机进行连接:实现远程控制
优化产品设计:确保其性能稳定、成本低廉、易于操作
01
技术方案
技术方案
选择 STM32F4 系列单片机作为主控制器:其具有高性能、低功耗、丰富外设等特点
电源模块:采用锂电池供电,同时加入电源管理芯片,确保系统稳定运行
外壳设计:采用轻便、坚固的材料制作手杖外壳,确保产品实用性和耐用性
01
软件设计
软件设计
使用 C 语言编写程序:实现各个功能模块的驱动和控制
基于单片机的导盲杖智能控制系统设计

154理论前沿Theory Frontier一、引言导盲杖能够帮助视障人群对周边出现的人或物作出判断,对提高视障人群的分辨能力具有着重要作用[1]。
为了改善导盲杖在实际应用过程中存在的不足,本文通过引入单片机,设计基于单片机的导盲杖智能控制系统。
并通过智能控制系统,提高了导盲杖应用的实用性、实时性与智能性,能够在较短时间内精确地反映出障碍物的具体位置信息。
二、硬件设计导盲杖智能控制系统的微处理器采用型号为STM26L102的单片机,其含有低功耗的处理器内核,对障碍物位置信息检测的速度较快[2]。
系统电源采用锂离子电池,具有电压高效转换功能,能够根据导盲杖的运行状况,调整其内部电压,能够保证在使用过程中具有充足的电量[3]。
GPS 模块采用集成度较高的芯片,由匹配元件、带通滤波器、基带处理器以及其他附加器件共同组成,能提高智能控制系统的灵活性。
三、软件设计(一)图像采集模块设计基于单片机的导盲杖智能控制系统设计田野 左晨曦基金项目:2022年陕西省大学生创新创业训练计划项目《智能避障导盲拐杖》阶段性成果(XJY2022DC39)摘要:传统导盲杖控制系统采用超声波发射设计避障模块,但无法在短时间内准确检测出障碍物的具体位置,并作出告警提示,缺乏智能性与实用性。
基于此,引入单片机,设计了一种全新的导盲杖智能控制系统。
系统硬件的微处理器采用型号为STM26L102的单片机,检测速度优势显著。
设备采用周期性连续抓拍方法,设计系统图像采集模块,将系统单片机与超声波发射相结合,设计智能避障模块,探测行进过程中的障碍物,并通过导盲杖发出语音或振动告警。
通过测试,本文设计的控制系统识别障碍物的准确率较高,能够更加精确地控制导盲杖。
关键词:单片机;导盲杖;控制系统;智能图像采集模块对系统的实时控制具有重要作用。
本文在设计系统图像采集模块时,采用周期性连续抓拍的方法,在无需系统预览拍照功能的基础上,使导盲杖摄像头自动取景,并将其显示在系统图像采集模块的预览界面。
基于单片机控制的智能导盲杖设计
www�ele169�com | 31智能应用0 引言据统计,我国约有盲人600万-700万,占世界盲人总数的18%,是世界上盲人最多的国家。
随着时代的发展,人们对盲人的关爱日益渐增,政府对盲人的重视程度也越来越高。
盲人参加一些正常活动的时候大多需要借助一些外物辅助,其中最常见的就是导盲杖。
以前的导盲杖就是一根普通的棍棒,盲人需要经过长期的练习才能勉强运用。
目前而言,市面上的导盲杖也只是用简单的铝合金之类的,它们的主要功能是可以折叠,方便携带。
这类导盲杖除了方便携带外就和原本的导盲杖没什么区别,对于盲人的帮助不是很大。
有些导盲杖上加上了语音提醒,但却是提醒周围的人,告诉他们自己是盲人,需要帮助。
虽说这样的盲人杖是方便了一点,但在某些特定环境下对盲人的帮助还不是很大,比如周围没有人但地形又很复杂的情况下,这种盲人杖所发挥的作用与传统的盲人杖发挥的作用基本一样。
本作品设计的智能导盲杖就在传统导盲杖的基础上,外加遥控发送接收、语音、超声波探测、GPS 定位等电路。
(1)遥控发送、接收系统主要是为了让盲人更好的分辨出导盲杖所在的位置,这个功能主要是为了在某些特定的情况下盲人找不到导盲杖的时候使用的,通过遥控使导盲杖发出声音,以获得导盲杖的位置所在。
(2)语音系统主要是用于提醒盲人导盲杖所在位置,障碍所在位置,达到让盲人提前知道障碍所在,使盲人更好的做出反应。
(3)超声波测距系统是为了帮助盲人检测前方何处有障碍物,以达到提前发出信号给盲人使得盲人可以做出相应的反应。
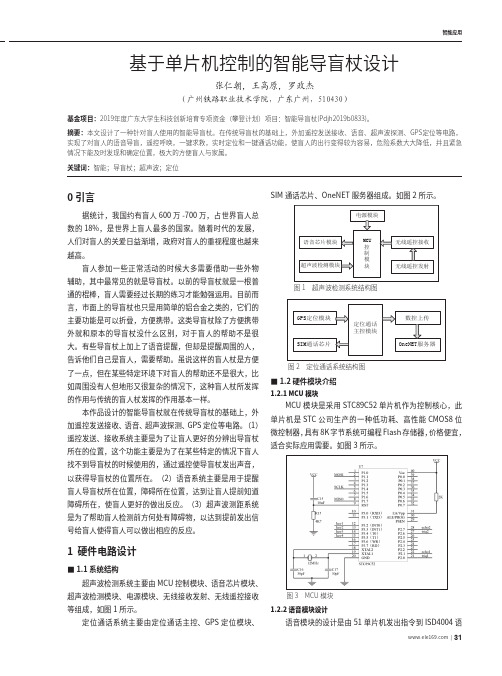
1 硬件电路设计■1.1 系统结构超声波检测系统主要由MCU 控制模块、语音芯片模块、超声波检测模块、电源模块、无线接收发射、无线遥控接收等组成,如图1所示。
定位通话系统主要由定位通话主控、GPS 定位模块、SIM■1.2 硬件模块介绍1.2.1 MCU 模块MCU 模块是采用STC89C52单片机作为控制核心,此单片机是STC 公司生产的一种低功耗、高性能CMOS8位微控制器,具有8K 字节系统可编程Flash 存储器,价格便宜,适合实际应用需要。
基于单片机的智能盲人手杖的设计

基于单片机的智能盲人手杖的设计一、引言智能盲人手杖是一种利用现代科技手段,为盲人提供导航、避障、安全等功能的辅助工具。
随着科技的不断进步,智能盲人手杖的设计也不断完善和创新。
本文将基于单片机技术,探讨智能盲人手杖的设计原理、功能模块和实现方法,并对其性能进行评估。
二、智能盲人手杖设计原理1. 传感器模块传感器模块是智能盲人手杖的核心部分,用于感知周围环境信息。
常见的传感器包括超声波传感器、红外线传感器和光敏传感器等。
超声波传感器可以测量物体与手杖之间的距离,红外线传感器可以检测前方障碍物,光敏传感器可以判断光线强弱。
2. 控制模块控制模块负责处理从传感器模块获取到的信息,并根据预设规则进行判断和决策。
单片机作为控制模块常用的核心部件之一,具有较强的计算和控制能力。
通过编程实现算法逻辑,单片机可以对传感器数据进行处理和分析,并控制手杖的运动。
3. 功能模块智能盲人手杖的功能模块包括导航模块、避障模块和安全模块等。
导航模块通过地图数据和定位技术,为盲人提供导航指引,帮助其准确找到目的地。
避障模块通过传感器检测前方障碍物,并发出警示信号提醒盲人注意。
安全模块可以实时监测手杖状态,如倾斜、摔倒等,及时报警并发送求救信息。
三、智能盲人手杖功能实现1. 导航功能实现为了实现导航功能,智能盲人手杖需要获取当前位置信息并与目的地进行对比。
可以利用GPS定位技术获取当前位置,并将地图数据存储在嵌入式存储器中。
单片机通过读取存储器中的地图数据,并结合当前位置信息计算出最佳路径,并通过语音合成技术将导航指引发送给盲人。
2. 避障功能实现避障功能是智能盲人手杖中最重要的功能之一,它可以帮助盲人检测前方障碍物并避免碰撞。
通过超声波传感器和红外线传感器,手杖可以实时监测到前方的物体,并根据距离和位置发出不同的警示信号。
当距离过近或者有危险物体时,手杖会通过声音或震动提醒盲人注意。
3. 安全功能实现安全功能主要是监测手杖的状态,并及时报警并发送求救信息。
基于单片机超声导盲杖设计论文
基于单片机的超声导盲杖设计摘要:本文利用超声波测距原理,以at89s52单片机为主控核心,设计了一种导盲装置,该装置可以对盲人前进的道路上的障碍物进行距离探测并把障碍物的距离信息转换成声音和振动提示,从而起到导盲作用。
abstract: this paper designs a blind guiding device whose main control part is at89s52 scm by using ultrasonic ranging principle. the device measure the distance with obstacle and transform the information into sound information and vibration alert, thus creating a blind guiding effect.关键词:单片机;超声波;导盲key words: scm;ultrasonic;blind guiding中图分类号:tp39 文献标识码:a 文章编号:1006-4311(2012)33-0176-030 引言盲人作为特殊的群体,其借助的辅助工具主要有手杖和导盲犬,其中使用手杖最为普遍。
传统的盲人拐杖是一根长杆,存在一系列的不足。
例如:探测的距离受限于拐杖的长度;难于探测悬挂的障碍物;无法对快速接近的障碍物发出预先报警;公共场合不利于收藏等。
为了更好地帮助盲人行走,国内外很多机构都研究和生产了相关电子导盲装置,由于利用了gps全球定位系统及建立无线电基站等方法,导致用这些方法实现的导盲器价格昂贵,不适合于普通消费者。
导盲犬则价格更高,并且在某些社交场合(例如禁止宠物进入)不适合使用,造成导盲犬无法普及。
本文构思设计一种能辅助盲人安全行动的智能拐杖,该拐杖可以对前方一定距离的障碍物进行探测,并给出警报提示,从而对视力存在缺陷者提供较好的辅助行走功能。
基于单片机的智能盲人手杖的设计
基于单片机的智能盲人手杖的设计
智能盲人手杖是基于单片机技术的一种辅助盲人出行的设备。
它
能够通过传感器检测周围环境,实时反馈给盲人,并提供语音提示和
震动反馈,以帮助盲人避免障碍物、寻找方向。
本文介绍了一种基于单片机的智能盲人手杖的设计。
首先,通过
光线传感器、超声波传感器等检测周围环境的传感器,获得障碍物的
距离和位置信息。
同时,为了提高设备的灵敏度和准确性,我们采用
了多个传感器的组合,并通过算法进行数据处理和分析,从而实现更
好的障碍物识别能力。
其次,为了方便盲人使用,我们在智能手杖上增加了语音提示和
震动反馈功能。
当检测到障碍物时,设备会通过语音提示告知盲人,
并输出震动信号进行提醒。
此外,我们还在手杖上增加了路线导航的
功能,通过预设目的地位置,设备能够引导盲人沿着正确的路线前进,从而减少迷路的风险。
最后,为了实现设备的智能化和可扩展性,我们采用了基于单片
机的系统架构,构建了一套完整的软硬件平台。
同时,我们还设计了
一个可编程的控制面板,允许用户自定义设备的功能和参数,以满足
不同盲人的需要。
综上所述,基于单片机的智能盲人手杖是一种非常实用的辅助设备,能够帮助盲人更加便利、安全地出行。
在未来,我们将继续完善
设备的性能和功能,进一步提高盲人的生活质量。
基于单片机的电子导盲杖设计
基于单片机的电子导盲杖设计编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(基于单片机的电子导盲杖设计)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为基于单片机的电子导盲杖设计的全部内容。
智能仪表设计基础课程设计课题名称电子导盲杖学生学号学生姓名所在班级指导教师二〇一二年九月目录1.功能要求及性能指标1.1 课程设计的目的和设计任务 (1)1。
2 课程设计的要求和技术指标 (1)2.方案设计2.1 硬件方案 (2)2。
1.1 测距模块方案选择 (2)2.1。
2 语音模块方案选择 (3)2。
1。
3 显示模块方案选择 (4)2。
1。
4 震动模块方案选择 (4)2。
2 软件方案 (4)3.硬件设计3。
1 STC89C52单片机介绍 (6)3。
1。
1 引脚分布及定义 (6)3.1.2 定时器 (8)3。
2 HC—SR04超声波模块介绍 (8)3。
2。
1 模块实物图及说明 (9)3.2。
2 测距电路设计 (9)3。
2。
3 测距程序设计 (11)3.3 ISD1420语音芯片介绍 (12)3。
3。
1 芯片引脚图及功能说明 (12)3。
3.2 语音录放电路的设计 (13)3.3。
3 语音程序设计 (14)3。
4 震动模块及LED灯的控制 (15)3.5 总原理图 (16)3。
6 仪器仪表清单 (18)4.软件设计4.1 程序程序设计 (18)4.2 程序调试结果 (22)5。
设计小结 (23)参考文献附录一:课程设计任务书附录二:软件程序清单1。
功能要求及性能指标1.1 课程设计的目的和设计任务世界上视觉障碍者数量众多,他们只能用百分之六十的感觉来获取信息。
基于单片机控制的导盲杖的设计

基于单片机控制的导盲杖的设计摘要:世界上视觉障碍者数量众多,95%的信息是通过视觉获得的。
因而设计一款实用的导盲杖来帮助视觉障碍者是十分重要的。
本论文确定了超声波导盲杖的总体设计方案,重点阐述了系统的硬件设计。
该系统采用MCS-51系列单片机89C52作为主控制器,设计了超声波发射接收电路和语音报警电路,以及LED 提醒功能,通过单片机的控制,以达到辅助盲人安全行走的目的。
关键词:单片机;导盲杖;超声波1、引言人生活过程中95%的信息是通过视觉获得的。
盲人生活在黑暗的世界中,给工作、生活、社交活动带来了莫大的困难。
如何安全行走,是盲人生活中最大的问题。
传统的手杖使用起来有诸多不便,导盲犬的训练周期过长且价格较贵,不利于普及。
随着电子技术的不断成熟和发展,人们对电子产品的需求转移到为人类的生活服务上来。
依据超声波测距原理,可以制作导盲杖帮助盲人行走。
通过单片机对超声波测距的控制进行声音播报,来提醒盲人当前状况,也使得这完全优于导盲犬。
2、系统设计该系统由单片机、超声波发射接收电路、液晶显示电路及语音模块等组成,控制核心为单片机。
单片机在接收到传感器的信息后,将传感器的测量信号转换为距离信息,再通过语音进行提醒。
系统工作原理方框示意图如图1所示:图1 系统工作原理框图3、超声波导盲系统(1)超声波概述声波按频率高低不同可分为三种:频率低于20Hz的机械波称为次声波;在20Hz~20KHz之间的机械波,能为人耳所闻,称为声波;高于20KHz的机械波称为超声波,其中频率大于100M的机械波称为超高频声波,其具有了波粒两相性。
(2)超声波传感器超声波传感器是利用超声波的特性研制而成的用于产生和接收超声波的器件,它既能够把其他形式的能转化为所需频率的超声能又能够把超声能转化为其他形式的能。
(3)超声检测的原理和方法超声测距的方法有相位检测法、声波幅值检测法和往返时间检测法等。
其中相位检测法精度高,但是监测范围有限,声波幅值检测法易受反射波的影响,采用最多的是往返时间检测法。
毕业论文基于超声波技术的导盲杖设计(论文)

基于超声波技术的导盲杖设计论文龙剑赵凤娟李伟钦邹东江强进指导老师:谭永宏(湖南科技学院电子工程系)摘要:由于电子技术和压电材料的快速发展,使超声波检测技术得到了迅猛发展。
利用超声波指向性强、能量消耗缓慢的特点,通过发射具有特征频率的超声波实现对目标的探测便是超声检测技术的应用之一。
本文利用超声波障碍检测技术设计了一款导盲杖,该导盲杖能自动检测前方3米范围内障碍物,采用语音和振动两种方式有效提示盲人避障。
本设计是一种基于超声波测距技术,以STC89C52单片机为核心的低成本、高精度智能导盲杖。
整个系统包括主控制器、超声波发射器、超声波接收器、温度补偿模块、语音播报模块、电源、开关、拐杖把和拐杖体。
在拐杖体和拐杖把对接处制有便于握杖手按动的电源开关,拐杖体采用刚性材料制成内腔为空体式,内腔中安装有控制电路板、电源及超声波发射与接收器件;在拐杖体下端、中间、顶端与拐杖把拐向相对应方向装有上、下排列的超声波发射器与接收器共3对。
在拐杖把下端有一语音播报模块。
本系统能够感应到使用者前方3米内脸部,腿部高度处的障碍物,并通过震动手柄,及语音播报通知使用者,以保障盲人的行路安全。
【关键词】导盲杖超声波测距技术语音播报 STC89C52一引言随着信息化和数字化的发展 ,现在社会中人们的生活变得更加丰富多彩 ,生活更加便利。
但是有一种人群却不容忽视 ,社会上形形色色、丰富多彩的物是与他们无缘的,他们就是盲人。
众所周知眼晴是“心灵之窗” ,而对于突然失去或从未拥有过“心灵之窗”的盲人来说 ,生活上的困难与心理上的痛苦是可想而知的。
他们的衣食住行存在诸多不便 ,而在出行与人际交往中遇到的困难更加突出。
目前,市场上的导盲工具主要是导盲犬 ,导盲犬习惯于颈圈、导盲牵引带和其他配件的约束;懂得“来”、“前进”、“停止”等口令,可以带领盲人安全地走路,当遇到障碍和需要拐弯时,会引导主人停下以免发生危险。
但是 ,导盲犬的培训过程长达 18 个月 ,综合费用达 2.5~3万美元 ,如此昂贵的价格不是普通用户能承担的,所以设计一款基于超声波技术的导盲杖。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的超声导盲杖设计
作者:张亮
来源:《价值工程》2012年第33期
摘要:本文利用超声波测距原理,以AT89S52单片机为主控核心,设计了一种导盲装置,该装置可以对盲人前进的道路上的障碍物进行距离探测并把障碍物的距离信息转换成声音和振动提示,从而起到导盲作用。
Abstract: This paper designs a blind guiding device whose main control part is AT89S52 SCM by using ultrasonic ranging principle. The device measure the distance with obstacle and transform the information into sound information and vibration alert, thus creating a blind guiding effect.
关键词:单片机;超声波;导盲
Key words: SCM;ultrasonic;blind guiding
中图分类号:TP39 文献标识码:A 文章编号:1006-4311(2012)33-0176-03
0 引言
盲人作为特殊的群体,其借助的辅助工具主要有手杖和导盲犬,其中使用手杖最为普遍。
传统的盲人拐杖是一根长杆,存在一系列的不足。
例如:探测的距离受限于拐杖的长度;难于探测悬挂的障碍物;无法对快速接近的障碍物发出预先报警;公共场合不利于收藏等。
为了更好地帮助盲人行走,国内外很多机构都研究和生产了相关电子导盲装置,由于利用了GPS全球定位系统及建立无线电基站等方法,导致用这些方法实现的导盲器价格昂贵,不适合于普通消费者。
导盲犬则价格更高,并且在某些社交场合(例如禁止宠物进入)不适合使用,造成导盲犬无法普及。
本文构思设计一种能辅助盲人安全行动的智能拐杖,该拐杖可以对前方一定距离的障碍物进行探测,并给出警报提示,从而对视力存在缺陷者提供较好的辅助行走功能。
该设计采用基于超声波传感器,以单片机为主控芯片,利用超声波测距原理辅助盲人行走,使用简单方便,具有方向性强、能量易于集中、传播距离较远,以及对障碍物定位具有一定的精确性,体积相对较小、方便携带、价格低廉等特点。
1 系统的硬件结构及基本功能
本设计主要分为主控模块、超声波测距模块和报警模块三个部分。
首先由超声波传感器发射端产生一个高频的超声波,然后接收端接收到这个回波,通过计算传感器发送信号和接收信号的时间间隔来确定对象的距离,最后通过对距离的判断发出警报信号,实现智能导盲的作用。
硬件的整体结构如图1所示。
1.1 超声波测距模块应用超声波脉冲回波法测距的过程是:用持续时间一定的超声频高压电脉冲信号激励超声换能器,使之向外部介质发送一串超声波,当超声波在换能器的声轴上遇到一个或多个目标时,部分声能将被反射回来并作用在换能器上,使换能器输出微弱的电信号。
该信号经过放大滤波后,送入微处理系统进行信息处理,以判定回波信号出现的时刻,并计算出超声波的射程时间及对应的目标距离,从而完成了一个测距周期。
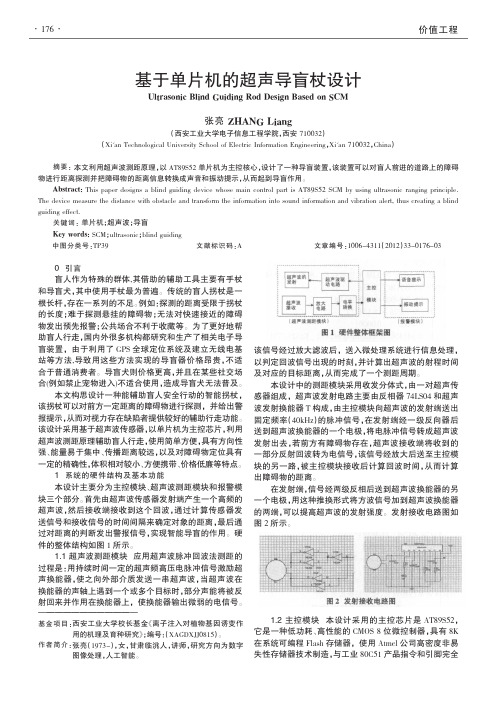
本设计中的测距模块采用收发分体式,由一对超声传感器组成,超声波发射电路主要由反相器74LS04和超声波发射换能器T构成,由主控模块向超声波的发射端送出固定频率
(40kHz)的脉冲信号,在发射端经一级反向器后送到超声波换能器的一个电极,将电脉冲信号转成超声波发射出去,若前方有障碍物存在,超声波接收端将收到的一部分反射回波转为电信号,该信号经放大后送至主控模块的另一路,被主控模块接收后计算回波时间,从而计算出障碍物的距离。
在发射端,信号经两级反相后送到超声波换能器的另一个电极,用这种推换形式将方波信号加到超声波换能器的两端,可以提高超声波的发射强度。
发射接收电路图如图2所示。
1.2 主控模块本设计采用的主控芯片是AT89S52,它是一种低功耗、高性能的CMOS 8位微控制器,具有8K在系统可编程Flash存储器,使用Atmel公司高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。
片上Flash允许程序存储器在线可编程,亦适于常规编程器。
在单芯片上,拥有灵巧的8位CPU和在系统可编程Flash,使得AT89S52在众多嵌入式控制应用系统中得到广泛应用。
在本设计中,该芯片主要完成把各个模块之间的数据信号进行分析处理后给出相应的指示,利用内部的定时器/计数器控制超声波发射接收并计算超声波的时间,通过时差算出距离,最终通过软件实现障碍物的识别,输出结果。
1.3 报警提示模块由于导盲杖被广泛用于室外的嘈杂环境中,本设计采用了蜂鸣器和振动双重报警,当通过超声波的发射和接收电路以及软件结合判断出前方有障碍物时,系统将发出报警信号。
声音报警电路通过一个简单的三极管驱动蜂鸣器报警,振动报警则是利用小型电机偏心轴原理实现导盲杖振动,可用于安静环境或嘈杂环境中听不见语音提示的情况。
电路图如图3所示。
1.4 硬件系统PCB图 PCB(Printed Circuit Board)是印制电路板的简称。
通常把在绝缘材料上,按预定设计,制成印制线路、印制原件或两者组合而成的导电图形称为印制电路。
而在绝缘基材上提供元器件之间的电气连接的导电图形称为印制线路。
这样就把印制线路的成品称为印制线路板,亦称为印制板或印制电路板。
印制电路板的设计是以电路原理图为根据,借助protell99SE软件来设计电路在电路板上的布局设计。
印制电路板的设计主要指版图设计,需要考虑外部连接的布局,内部电子元件的优化布局、金属连线和通孔的优化布局、电磁保护、热耗散等各种因素。
优秀的版图设计可以节约生产成本,达到良好的电路性能。
PCB的制作一般分为单层板、双层板、多层板。
由于本设计的元器件比较少且连线不复杂,所以采用的是单层板,导线只出现在其中一面。
本设计的PCB图如图4所示。
2 系统软件模块组成及基本功能
系统的软件设计采用C语言,可以大大提高程序编写时的效率,设计的关键是超声的发射和接收,障碍物距离的计算和语音报警。
主程序首先对系统初始化,然后循环调用超声波发射子程序,延时程序,超声波测距子程序,报警子程序等。
其中,超声波发射子程序的主要功能是利用单片机的P1.0口产生一个频率为40KHz、占空比为40%的方波。
考虑到前方可能一直没有障碍物的特殊情况,并为了使定时器便于计时,以及距离范围在3米内的具体要求,发射子程序采用先连续发射40个周期的方波(时长为1ms),然后延时20ms(用于等待接收端应答)的方式,保证每次收到的回波都是最近一次发射的脉冲反射回来的。
测距子程序包括回波时间计算和距离计算两部分:回波时间计算由单片机的的P1.1口控制,一旦查询到该引脚由高到低,则表明接收到了本次发射返回的超声回波;而距离的计算则通过定时器中存储的数据进行简单运算得出。
报警子程序分为振动报警和蜂鸣器报警,之所以采用振动报警是由于考虑到嘈杂环境下蜂鸣器音量有限而设置的。
主程序流程如图5所示。
3 系统调试及测试结果
系统调试分为硬件调试与软件调试,经仿真调试后焊接线路板,并进行了距离测试,结果如表1所示。
4 结论
本设计利用基于单片机的超声波测距原理完成了智能导盲杖的设计,可以探测到0到3米的障碍物,同时发出蜂鸣和振动提示,实现了探测一定范围内障碍物的功能,制作出的实物还在调试测试阶段,功能稳定性还有待于后期调试和检验。
与普通导盲杖相比,本设计的最大不同之处在于可以测出3米内的障碍物而不是传统的那种只可以杆长可以接触到的范围,该超声导盲杖可以使盲人及时避障,准确性可靠,灵敏度高。
同时提供人性化的设计,用语音加振动予以提示,为盲人的生活带来了方便。
但是本设计尚存在许多不足,从表1中可以看出,当距离范围
此外,本设计目前只能暂时测试出前方的障碍物,对于左右方向的障碍物尚在设想中,考虑可在不同的方向各配备一个超声波探头,软件设计的时候设置三个方向的数据分析,这样就可以增加障碍物识别的范围。
参考文献:
[1]胡伟,季晓衡.单片机C语言程序设计及应用实例.北京:人民邮电出版社,2003:269-395.
[2]杨西明,朱骐.单片机编程与入门.北京:机械工业出版社,2004:206-212.
[3]薛晓书.单片微机原理及接口技术[M].西安:西安石油大学,2002:18-25.
[4]夏路易,石宗义.电路原理图与电路板设计教程Protel 99SE.北京:北京希望电子出版社,2006:69-189.
[5]郑冬青.用PROTEL99 SE布线的基本流程.http:///.2001-10-10.
[6]Kim Hyoung-Tae.How to use KEIL 8051 C Compiler.Yangseogak publish Company,2001:1-19.
[7]S.moue,S.Konomi,H.Yasuura.Privacy in the Digitally Named World with RFID Tags. Workshop on Socially-informed Design of Privacy-enhancing Solutions in Ubiquitous Computing,2002:1001-1004.
[8]R.Want,K.Fishkin,A.Gujar,B.Harrison.Bridging Physical and Virtual Worlds with Electronic Tags. ACM CHI,1999:193-196.。