计算理论第6章
第六章-土压力计算理论

墙或者U形桥台上土压力,可近似看作静止土压力。
按照水平向自重应力的计算公式确定。
若墙后填土为均匀体,则单位面积上静止 土压力为
若墙后填土中有地下水,则计算静止土压 力时,水中土的重度应取浮重度
静止土压力计算的关键是静止侧压力系数的 确定。K0可由室内的或现场的静止侧压力试 验来测定。 对于砂或正常固结的粘土,可根据有效内摩 擦角来确定
本章的任务是讨论土压力的大小和分布规律的确 定方法。
位移对土压力的影响及三种土压力
主动
被动
挡土墙不向任何方向发生位移和转动时,墙 后土体处于弹性平衡状态,作用在墙背上的土 压力称为静止土压力。 挡墙沿墙趾向离开填土方向转动或平行移动, 且位移达到一定量时,墙后土体达到主动极限 平衡状态,填土中开始出现滑动面 ,这时挡土 墙上的土压力称为主动土压力。
五、填土为成层土时的土压力计算
由于各层填土重度不同,使得填土竖向应力分布 在土层交界面上出现转折
由于各层填土粘聚力和内摩擦角不同,所以在计 算主动或被动土压力系数时,需采用计算点所在 土层的粘聚力和内摩擦角
习 题
第4节 库仑土压力理论
一、基本原理和基本假定 基本原理:库伦土压力理论是根据墙后土体处于 极限平衡状态并形成一滑动楔体时,从楔体的静 力平衡条件得出的土压力计算理论。 基本假设: ①墙后的填土是理想的散粒体(粘聚力c=0); ②墙背倾斜、粗糙、墙后填土面倾斜;
(一)基本计算公式
朗肯理论的主动土压力系数
(二)无粘性土的主动土压力计算
(三)粘性土的主动土压力计算
ea=0
有均布荷载时粘性土的主动土压力
计算理论6章 Lambda演算模型

1 Lambda演算理论
• Lambda变换规则
• 变换(应用规则): (x.E) E0 E[E0/x]
• 例: (x.xy)z zy (x.yz)x yz (x.(y.yx)z)t (y.yt)z zt (x.(y.yx)z)t (x.zx)t zt
2 纯Lambda演算实例
• 整数上的运算: 令 plus m n 表示 m+n
time m n 表示 m×n 则
• plus = x.y. a.b. (x a)((y a)b) • time = x.y.a. x (y a)
2 纯Lambda演算实例
• plus m n = a.b. (m a)((n a)b) = ab. ((ab. amb)a)(((ab.anb)a)b) = ab. (b. amb)(anb) = ab. amanb = ab. am+nb
• 逻辑运算
• 布尔值
T = a.b.a F = a.b.b
• 布尔运算 and = x.y. x y F or = x. y. x T y not = x. x F T
2 纯Lambda演算实例
• and T T = T T F = (ab. a) T F =T
• or T F = T T F = (ab. a) T F =T
• E ::= x | E1 E2 | x:T. E | (E) T ::= Int | T T
• 类型系统 (表示类型上下文)
• x: T ├ x: T
•
├ x: T1,├ y:T2
, y:T2 ├ x:T1
•
├ x: T1, ├ E: T2 ├ x:T. E : T1 T2
第6章隧道结构计算
α— 轴向力偏心影响系数。 1 1.5 e0 h
抗拉控制检算
大偏心判断准则:
e0 0.2h
此时承载能力由抗拉强度控制:
KN 1.75Rlbh
6e0 1 h
式中: Rl — 混凝土的抗拉极限强度,
其它符号意义同前。
6.5 衬砌截面强度验算
6.4 隧道洞门计算
1.洞门墙墙身抗压承载能力计算(承载能力极限状态)
2.洞门墙墙身抗裂承载能力计算(正常使用极限状态)
6.4 隧道洞门计算
3.洞门墙地基承载能力计算
4.抗倾覆计算 5.抗滑动计算
6.5 衬砌截面强度验算
6.5.1 检算内容
(1)安全系数检算 (2)偏心检算
6.5.2 适用范围
铁路隧道拼装式衬砌、复合式衬砌 双线隧道整体式衬砌 公路隧道衬砌结构
6.5.3 安全系数检算
(1) 允许安全系数 混凝土和石砌结构的强度安全系数
圬工种类及 荷载组合
破坏原因
混凝土
主 附主 要 加要 荷 荷、 载载
石砌体 主 附主 要 加要 荷 荷、 载载钢筋ຫໍສະໝຸດ 凝土主附主要
加要
荷
荷、
载
载
(钢筋)混凝土或石砌
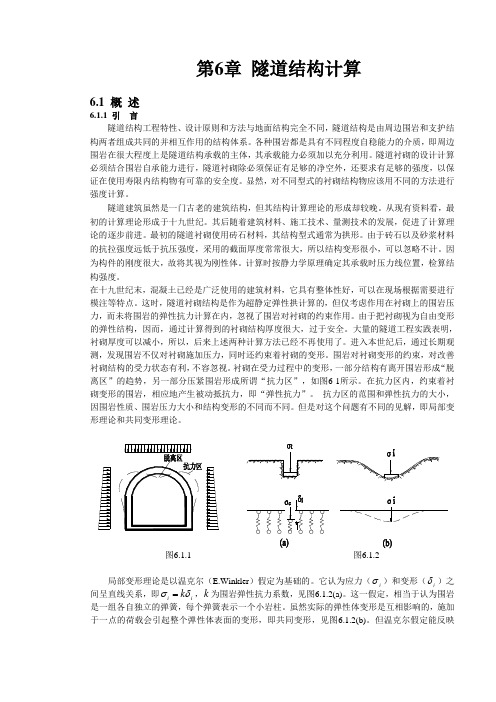
设围岩垂直压力大于 侧向压力, 则存在拱顶 脱离区,两侧 抗力区。
6.2 结构力学方法
6.2.3 隧道衬砌荷载分类
(1) 主动荷载 主要荷载:围岩压力、支护结构自重、回填土荷载、地下 静水压力及车辆活载等。 附加荷载:冻胀压力、地震力等。 (2) 被动荷载 被动荷载是指围岩的弹性抗力,计算有共同变形理论和局 部变形理论。
直刚法计算流程
第6章 玻璃面板的计算和设计
第6章 玻璃面板的计算和设计§6.1 计算理论建筑工程中典型温度下的玻璃特征是完全弹性的,玻璃也不具有蠕变和松弛特性。
当玻璃面板变形较小时,可采用小变形理论计算外荷载作用下的玻璃面板内力和位移。
对于各种矩形、圆形或三角形的具有不同边界条件的玻璃面板可采用解析解、表格或有限元方法计算。
大面积玻璃面板的实际位移一般要大于小变形理论所得结果,这是因为板因弯曲变形会产生中面的拉应力,而小变形理论忽略了中面拉应力对位移和应力的阻止或抵消效应。
所以,对玻璃幕墙中的玻璃面板,应采用精确的几何非线性方法进行计算和分析。
玻璃与其支承结构连接处的应力状态十分复杂,可采用有限单元法计算此处的局部应力分布,计算结果的可靠性取决于的边界条件选取的合理性。
当然,连接处有限单元模型的精确与否只对局部应力有影响,对玻璃面板的位移和大面应力影响不大。
玻璃内力采用弹性方法计算,截面最大应力设计值不应超过玻璃大面强度设计值。
无地震作用效应组合时,应力应符合下式要求:g w f ≤σγ0 (6-1)有地震作用效应组合时,应力应符合下式要求:RE g E f γσ/≤ (6-2)式中 g f —— 玻璃的大面强度设计值(N/mm 2),按表2-3取用;0γ—— 重要性系数,应取不小于1.0;RE γ——抗震调整系数,应取1.0;w σ——重力荷载和风荷载组合在玻璃中产生的最大应力设计值(N/mm 2);E σ——重力荷载、风荷载及地震荷载组合在玻璃中产生的最大应力设计值(N/mm 2)。
玻璃最大挠度不应超过规定限值。
lim ,f f d d ≤ (6-3)式中 f d ——玻璃在风荷载标准值作用下产生的最大挠度值(mm );lim ,f d ——玻璃的挠度限值,对窗框玻璃取其短边的1/60;点支玻璃取其长边的1/60。
在计算中值得注意的是,由于在这里考虑了玻璃面板的几何非线性效应,因此在计算时应先进行各种荷载的组合,然后对最不利荷载组合进行最大应力的计算,它不符合线性条件下的各种荷载作用下最大应力的叠加原理。
第6章结构件及连接的疲劳强度计算原理

148第6章 结构件及连接的疲劳强度随着社会生产力的发展,起重机械的应用越来越频繁,对起重机械的工作级别要求越来越高。
《起重机设计规范》GB/T 3811-2008规定,应计算构件及连接的抗疲劳强度。
对于结构疲劳强度计算,常采用应力比法和应力幅法,本章仅介绍起重机械常用的应力比法。
6.1 循环作用的载荷和应力起重机的作业是循环往复的,其钢结构或连接必然承受循环交变作用的载荷,在结构或连接中产生的应力是变幅循环应力,如图6-1所示。
起重机的一个工作循环中,结构或连接中某点的循环应力也是变幅循环应力。
起重机工作过程中每个工作循环中应力的变化都是随机的,难以用实验的方法确定其构件或连接的抗疲劳强度。
然而,其结构或连接在等应力比的变幅循环或等幅应力循环作用下的疲劳强度是可以用实验的方法确定的,对于起重机构件或连接的疲劳强度可以用循环记数法计算出整个循环应力中的各应力循环参数,将其转化为等应力比的变幅循环应力或转化为等平均应力的等幅循环应力。
最后,采用累积损伤理论来计算构件或连接的抗疲劳强度。
6.1.1 循环应力的特征参数 (1) 最大应力一个循环中峰值和谷值两极值应力中绝对值最大的应力,用max σ表示。
(2) 最小应力一个循环中峰值和谷值两极值应力中绝对值最小的应力,用min σ表示。
(3) 整个工作循环中最大应力值构件或连接整个工作循环中最大应力的数值,用max ˆσ表示。
(4) 应力循环特性值一个循环中最小应力与最大应力的比值,用minmaxr σσ=表示。
(5) 循环应力的应力幅一个循环中最大的应力与最小的应力的差的绝对值,用σ∆表示。
149,r i i N σ-曲线max min max (1)r σσσσ∆=-=-(6) 应力半幅一个循环中最大的应力与最小的应力的差的绝对值的一半,用a σ来表示。
max min /2a σσσ=-(7) 应力循环的平均值一个循环中最大的应力与最小的应力的和的平均值,用m σ表示。
第六章地球椭球与椭球计算理论
算,向北为正,叫北纬(0 -90°),向南为负,叫南纬
(0°-90°)。从地面点P沿椭球法线到椭球面的距离叫大
地高。大地坐标坐标系中,点的位置用,表示。如果点不在 椭球面上,表示点的位置除,外,还要附加另一参数——大 地高,它同正常高及正高有如下关系
H H正常 (高程异常)
H
H正
N
(大地水准面差距
)
地球椭球与椭球计算理论
2. 空间直角坐标系
1
以椭球体中心O 为原点,起始
2 子午面与赤道面交线x 为轴,在赤
3 道面上与X 轴正交的方向为Y 轴,
4 椭球体的旋转轴为Z 轴,构成右手
5 坐标系O—XYZ,在该坐标系中,p
6356752.3142(m)
9
c 6399698.9017827110(m) 6399596.6519880105(m) 6399593.6258(m)
10
1/298.3
e2 0.006 693 421 622 966
e2 0.006 738 525 414 683
1/298.257 0.006 694 384 999 588 0.006 739 501 819 473
1 1 .大地坐标系
2
3
p 点的子午面NPS 与起始子午面
4
NGS 所构成的二面角L,叫做p 点的
5
大地经度,由起始子午面起算,向东
6
为正,叫东经(0°~180°),向西
7
为负,叫西经(0°~180°)。P
8 9
点的法线 Pn 与赤道面的夹角B,叫
做P点的大地纬度。由赤道面起算,
第6章_隧道结构计算
第6章 隧道结构计算6.1 概 述6.1.1 引 言隧道结构工程特性、设计原则和方法与地面结构完全不同,隧道结构是由周边围岩和支护结构两者组成共同的并相互作用的结构体系。
各种围岩都是具有不同程度自稳能力的介质,即周边围岩在很大程度上是隧道结构承载的主体,其承载能力必须加以充分利用。
隧道衬砌的设计计算必须结合围岩自承能力进行,隧道衬砌除必须保证有足够的净空外,还要求有足够的强度,以保证在使用寿限内结构物有可靠的安全度。
显然,对不同型式的衬砌结构物应该用不同的方法进行强度计算。
隧道建筑虽然是一门古老的建筑结构,但其结构计算理论的形成却较晚。
从现有资料看,最初的计算理论形成于十九世纪。
其后随着建筑材料、施工技术、量测技术的发展,促进了计算理论的逐步前进。
最初的隧道衬砌使用砖石材料,其结构型式通常为拱形。
由于砖石以及砂浆材料的抗拉强度远低于抗压强度,采用的截面厚度常常很大,所以结构变形很小,可以忽略不计。
因为构件的刚度很大,故将其视为刚性体。
计算时按静力学原理确定其承载时压力线位置,检算结构强度。
在十九世纪末,混凝土已经是广泛使用的建筑材料,它具有整体性好,可以在现场根据需要进行模注等特点。
这时,隧道衬砌结构是作为超静定弹性拱计算的,但仅考虑作用在衬砌上的围岩压力,而未将围岩的弹性抗力计算在内,忽视了围岩对衬砌的约束作用。
由于把衬砌视为自由变形的弹性结构,因而,通过计算得到的衬砌结构厚度很大,过于安全。
大量的隧道工程实践表明,衬砌厚度可以减小,所以,后来上述两种计算方法已经不再使用了。
进入本世纪后,通过长期观测,发现围岩不仅对衬砌施加压力,同时还约束着衬砌的变形。
围岩对衬砌变形的约束,对改善衬砌结构的受力状态有利,不容忽视。
衬砌在受力过程中的变形,一部分结构有离开围岩形成“脱离区”的趋势,另一部分压紧围岩形成所谓“抗力区”,如图6-1所示。
在抗力区内,约束着衬砌变形的围岩,相应地产生被动抵抗力,即“弹性抗力”。
第6章 土压力计算分析

20
库伦主动土压力计算
图6-22所示挡土墙,已知墙背AB倾斜,与竖直线的夹角为ε;填土表面AC是 一平面,与水平面的夹角为β。若挡土墙在填土压力作用下背离填土向外移动, 当墙后土体达到主动极限平衡状态时,土体中产生两个通过墙角B的滑动面AB及 BC。若滑动面BC与水平面间夹角为 ,取单位长度挡土墙,把滑动土楔ABC作为 脱离体,考虑其静力平衡条件,作用在滑动土楔ABC上的作用力有:
图6-22 库伦主动土压力计算
21
(1)土楔ABC的重力为G。若 值已知,则G的大小、方向及作用 点位置均已知。
(2)土体作用在滑动面BC上的反力为R。R是BC面上摩擦力T1与 法向力N1的合力,它与BC面的法线间的夹角等于土的内摩擦角 。由 于滑动土楔ABC相当于滑动面BC右边的土体是向下移动,故摩擦力T1 的方向向上,R的作用方向已知,大小未知。
坡度: 坡
1:m
高
坡
坡底趾源自坡肩 坡 顶坡 角
天然土坡
• 江、河、湖、海岸坡 • 山、岭、丘、岗、天然坡
人工土坡
• 挖方:沟、渠、坑、池 • 填方:堤、坝、路基、堆料
滑坡:
一部分土体在外因作用下,相对于另一 部分土体滑动
土压力的类型与影响因素
• 土压力类型
土压力
静止土压力
主动土压力
1.静止土压力
无粘性土
p p ZK p
Pp
1 H
2
2Kp
粘性土
pp ZKp 2c K p
Pp
1 2
H
2Kp
2cH
Kp
• 【例】有一挡土墙,高6米,墙背直立、光滑,墙后填土
面水平。填土为粘性土,其重度、内摩擦角、粘聚力如下 图所示 ,求主动土压力及其作用点,并绘出主动土压力 分布图
《物性估算原理及计算机计算》 第6章UNIFAC法的理论基础及其应用
6.1 似晶格模型溶液理论及其对无热溶液的处理 6.2 UNIQUAC方程式 6.3 UNIFAC法估算活度系数 6.4 UNIFAC法估算活度系数实例及计算机程序
总目录
6.1 似晶格模型溶液理论及其对无热溶液的处理
6.1.1 液体的似晶格模型
似晶格理论又称严格正规溶液(S-正规溶液),是由Guggenheim等 提出和发展起来的,该理论假定溶液中分子都置于一定格子上,各组分 分子的大小和结构类似,在格子上彼此交换而不改变格子的结构,因此, 溶液的体积仅决定于分子的总数,过剩体积VE为零。Guggenheim等用 晶格模型处理液体混合物,但液体中并没有象晶体那样的格子,把液体 看作与晶体的格子类似,只是一种处理方法,所以称为似晶体模型。
ln k Qk [1 ln( ˆm mk )
m
m
ˆm km ˆn nm
]
(6-68)
n
ln k(i) Qk [1 ln( ˆm(i) mk )
mቤተ መጻሕፍቲ ባይዱ
m
ˆm(i) km ˆn(i) nm
]
(6-69)
n
总目录
本章目录
上页
下页
1987年,Larsen等对UNIFAC法做了较大的修正,其主要
总目录
本章目录
上页
下页
6.1.3 无热溶液的混合自由焓和过剩自由焓
由似晶格模型导出的无热溶液的过剩自由焓公式
GE (c)
kT(
N1
ln
1
x1
N2
ln
2
x2
z 2
q1 N1
ln
第6章 光线的光路计算及像差理论

主光线折射
想一想:你能在图中找出对应光线或平面吗? 子午面既是光束的对称面,又是系统的对称 面,位于该平面的子午光束通过系统后永远位在同 一平面内,因此计算子午面内光线的光路,是一个 平面的三角、几何问题,可以在一个平面图形表示 出光束的结构。 弧矢平面随主光线折射而改变。
一、轴外像差概述
如果没有像差,则所有光线对(上下、前后) 都 应相交在理想像平面上的同一点。 由于像差的存在,所有光线对(上下、前后)通过 系统后的交点,既不在主光线上,也不在理想像平面 上。
1、目视光学系统:一般选择D光或e光校正单色像 差,对C、F光校正色差。 2、普通照相系统:一般对F光校正单色像差,对D、 G校正色差。 3 、近红外和近紫外光学系统:一般对 C光校正单 色像差,对d、A校正色差。, 4、对特殊光学系统:只对使用波长校正单色像差。
第二节:光线的光路计算
光线光路计算是几何光学研究光学系统成像的 基本方法,也是进行光学设计的基本问题之一。 在光路计算中,根据任务的不同可分为: ( A )子午光线光路计算。它又包括近轴光路计算 和非近轴光路计算; (B)轴外点细光束的子午焦点和弧矢焦点的计算; (C)空间光线的计算。 对于第一种光路计算任何光学系统设计时都要进 行。 一. 子午面内的光线光路计算 二. 沿轴外点主光线细光束的光路计算 三. 计算举例
轴外点也有球差,宽光束(上下光线)交点(像点) 与细光束(上下光线)像点沿轴距离——子午轴外球差。 前后光线交点(像点)与细光束(前后光线)像点的 就是弧矢轴外球差。
上下、前后光线交点的沿轴距离:宽光束像散X; 细光束像散x.
上下、前后光线交点的沿轴距离:宽光束像散X; 细光束像散x.
② r >0,n>n (或r <0,n<n )的面对光束起会聚作用, 称会聚面; r >0,n<n(或r <0,n>n)的面对光束起发散作 用,称发散面;
第六章 混凝土的徐变、收缩、温度效应理论(特选内容)
加载早期对徐变的影响最大。 • 在周围相对湿度低于混凝土表面蒸发率增加(如太阳照射)时,
混凝土干燥及随之发生的徐变将增加。 • 温度升高混凝土的徐变将有显著增加。
优选内容
33
§6.1.1 徐变、收缩及影响因素
混凝土成份及构件尺寸等,DIN4227指南、CEB-FIP建
议、ACI209委员会建议及BS5400规范都有相应计算方
优选内容
16
§6.1.1 徐变、收缩及影响因素
2 .徐变、收缩对桥梁结构的影响 以下现象是现代混凝土结构设计所必须考虑的问题: 配筋构件中,随时间而变化的混凝土徐变、收缩将导
致截面内力重分布。混凝土徐变、收缩引起的预应力损
31
§6.1.1 徐变、收缩及影响因素
3 .影响徐变、收缩的因素
养护条件对徐变、收缩影响的解释:
• 延长潮湿养护时间可以延滞收缩进程,但养护对收缩量的影响虽相当
复杂,但一般是较小的。
• 长期养护的混凝土的强度较高,徐变有所降低,但由徐变所缓解的那
部份收缩应力亦将减小。这些因素可能导致骨料周围发生微裂,最终
优选内容
18
§6.1.1 徐变、收缩及影响因素
2 .徐变、收缩对桥梁结构的影响 应注意:
外加强迫变形如支座沉降或支座标高调整所产生的约 束内力,也将在混凝土徐变的过程中发生变化,部分约 束内力将逐渐释放。
徐变对细长混凝土压杆所产生的附加挠度是验算压杆 屈曲稳定所不能忽视的问题。
优选内容
19
§6.1.1 徐变、收缩及影响因素
3 .影响徐变、收缩的因素 水灰比、水泥用量、含水量对徐变、收缩影响的解释:
第6章-3偏心受力构件
( I1 / l1 I 2 / l2 ) H K1 I
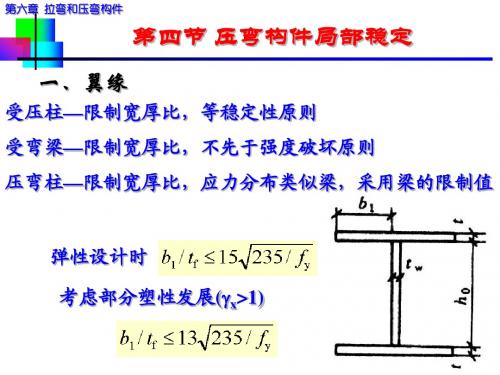
第六章 拉弯和压弯构件
第八节 压弯构件计算长度
二、单层框架平面内计算长度
2、有侧移单层框架柱计算长度系数m
(1)固接柱、刚性梁m=1.0
(2)铰接柱、刚性梁m=2.0
(3)固接柱、铰接梁m=2.0
(4)铰接柱、刚接梁m>2.0,按梁柱线刚度比k查表 (5)固接柱、刚接梁2.0 >m>1.0,按梁柱线刚度比k查表
31
第六章 拉弯和压弯构件
第八节 压弯构件计算长度
二、单层框架平面内计算长度
3、无侧移单层框架柱m
(1)固接柱、刚性梁m=0.5
(2)铰接柱、刚性梁m=0.7
(3)固接柱、铰接梁m=0.7
(4)铰接柱、刚接梁1.0>m>0.7,按梁柱线刚度比k查表 (5)固接柱、刚接梁0.7>m>0.5 ,按梁柱线刚度比k查表
二、单层框架平面内计算长度
1、决定计算长度(稳定性)的主要因素 (1)有无侧移。 (2)梁柱线刚度比k (3)柱脚约束。
28
第六章 拉弯和压弯构件
第八节 压弯构件计算长度
二、单层框架平面内计算长度
2、有侧移单层框架柱计算长度系数m
• 可以认为各柱是同时失 稳的,假定失稳时横梁 两端的转角θ相等 • 但方向相反,其计算长 度系数μ亦可查表求得 • 梁、柱的线刚度比采用 与柱相邻的两根横梁的 线刚度之和K1
式中:
x 由 0 x 确定的轴压构件稳定系 数;
M x 计算区段的最大弯矩;
mx M x N f x A W (1 N ) 1x x x NE
W1 x I x y 0 , I x 对x轴的毛截面惯性矩; y 0 为由x轴到压力较大分肢的轴 线距离或到压力较 大分肢腹板外边缘的距 离,二者取大值。 其余符号同前。
理论力学试题库-计算题第6章

理论力学试题库题型:A 填空题,B 选择题,C 简答题,D 判断题,E 计算题,F 综合题,G 作图题。
编号E04001中,E 表示计算题,04表示内容的章节号即题目内容属于第04章,001表示章节题号的序号,即此题是第04章计算题的001号题。
计算题:06:E06001. (10分)如图E06001所示曲柄滑杆机构中,滑杆上有一圆弧滑道,其半径R=100mm ,圆心O1在导杆BC 上。
曲柄OA 长100mm ,以等角速度ω=4 rad/s 绕O 轴转动。
求导杆BC 的运动规律以及当曲柄与水平线间交角ϕ=30°时导杆BC 的速度和加速度。
图E06001E06002. (10分)如图E06002所示机构中,假定杆AB 以匀速v 运动,开始时ϕ=0,求当4πϕ=时摇杆OC 的角速度和角加速度。
图E06002E06003.(10分)图示曲柄滑杆机构中,滑杆上有一圆弧形滑道,其半径R=100mm,圆心在导杆BC上。
曲柄长OA=100mm,以等角速度绕O轴转动。
求导杆BC 的运动规律以及当曲柄与水平线间的交角为30°时,导杆BC的速度和加速度。
图E06003E06004.(10分)图示为把工件送入干燥炉内的机构,叉杆OA=1.5m,在铅垂面内转动,杆AB=0.8m,B端为铰链,B端有放置工件的框架。
在机构运动时,工件的速度恒为0.05m/s,杆AB始终铅垂。
设运动开始时,角ϕ=0。
求运动过程中角ϕ与时间的关系,以及点B的轨迹方程。
图E06004E06005.(10分)已知搅拌机的主动齿轮以n=950 r/min 的转速转动。
搅杆ABC 用销钉A,B与齿轮O2, O3相连,如图所示。
且AB=O2 O3, O3A=O2B=0.25m,各齿轮齿数为z1=20,z2=50,z3=50。
求搅杆端点C的速度和轨迹。
图E06005E06006. (10分)机构如图所示,假定杆AB 以匀速v 运动,开始时0=ϕ。
第6章 Hilbert变换-3. 二维变换

第6章 Hilbert 变换3. 二维变换早在1957年,Duffin 就从理论上和形式上讨论了二维Hilbert 变换,主要是研究同Fourier 变换的对应关系及相应理论的表达式,并提出了与下面即将介绍的Riesz 变换相同的二维表达形式。
从具体的算法实现角度而言,因为二维的sgn 函数可以存在多种定义形式,加上二维函数自身以及函数空间的复杂性,笔者还没有发现一种很好的方法来定义二维的解析信号及对应的Hilbert 变换。
从笔者阅读过的参考文献来看,无论采用何种定义的二维sgn 函数,在计算二维解析信号时,都使用了快速二维Fourier 变换。
笔者在本节中只介绍两种形式的二维Hilbert 变换算法,并提供相应的图像变换结果供读者参考。
3.1 简单扩展第一种形式的二维Hilbert 变换实际上只是一维Hilbert 变换的简单扩展,只对二维信号的其中一个变量与sgn 函数进行卷积计算,Arnison 等人在研究中采用了这种算法。
对于一个二维序列],[n m f 、⎩⎨⎧-=-=1,,1,01,,1,0N n M m 而言,二维Hilbert 变换的具体计算步骤如下所示: 1、计算],[n m f 的二维Fourier 变换],[l k F ,⎩⎨⎧-=-=1,,1,01,,1,0N l M k 。
2、把],[l k F 与⎪⎩⎪⎨⎧<<≤<-==⋅-M k M/j M/k j k k j 2 ,20 ,0,0]sgn[相乘,得到],[l k F H 。
3、计算对],[l k F H 的逆向二维Fourier 变换,得到的实部就是所求的二维Hilbert 变换。
上面的计算也可以由一维Hilbert 变换来实现:依次对N 行序列],[n m f 沿着下标m 的方向进行一维Hilbert 变换,即可得到与上述算法相同的结果。
如果在第二步中,继续把乘积与函数⎪⎩⎪⎨⎧<<≤<-==⋅-N l N/j N/l j l l j 2 ,20 ,0,0]sgn[相乘,就得到另外一种形式的二维Hilbert 变换的定义。
第6章 不定积分

第六章 不定积分引 言我们知道,函数是数学分析研究的主要对象,前面几章我们已经学习了函数的微分学理论,主要内容包括导数的计算和导函数的分析性质,而其基本问题是导数的计算——给定已知函数,求出它的导数;但在某些实际问题中,往往需要考虑与之相反的问题——求一个函数,使其导数恰好是某一个给定的函数——这就是所谓的积分问题。
看一个例子:例1 一个静止的物体,其质量为m=1, 在力()sin F t t = 的作用下沿直线运动,给出物体的运动速度()v t 所满足的方程。
解、由所给的条件,可以利用Newton 第二定理计算出物体的加速度为sin F a t m==,因而,若设其速度为()v t ,则()sin v t a t ¢==。
因此,这个问题本质就是:已知导函数()v t ¢, 求原来的函数()v t 。
这类问题在实际应用和工程技术领域中还有很多,如几何问题中常见的已知切线求曲线问题、自然界中广泛存在的反应扩散现象等,因而,这类问题有很强的应用背景。
特别是在17世纪,这类问题是当时物理和几何学中急待解决的问题,是摆在数学家面前的重要的问题,经过3百多年的努力,今天,这类问题不仅已经得到彻底的解决,而且已经形成了完整且完美的数学理论――积分学理论:称这类由导函数()f x ¢ 求 原来函数)(x f 的运算为积分运算,研究这类运算及其相关的理论就是积分学理论。
我们将在本章和下一章引入这种理论。
为了引入这种理论,先引入基本概念。
§1不定积分概念与基本积分公式 一 、 原函数与不定积分我们引入积分理论中的基本概念。
定义1.1 设函数)(x f 与)(x F 在区间I 上有定义且)(x F 可导,若)()(x f x F =', Ix ∈,则称)(x F 为)(x f 在区间I 上的一个原函数。
注、由定义,若)(x F 为)(x f 的一个原函数,则从导数角度,)(x f 为)(x F 的导函数,这也反映了原函数何导函数的紧密关系。
岩土工程渗流:第6章 地下水渗流理论计算

6.1 概 述
6.1.2 基本假定及计算条件简化 渗流所研究的一般是地下水中的重力水 一般作如下的规定:
(1)渗流服从达西(Darcy)定律。 (2)不考虑土体和水的压缩性,渗透时土体的空隙 大小和孔隙率不变。 (3)土体的饱和度不变。
4
本章渗流计算内容
闸、坝基渗流问题 ——按一维简化,考虑成层土层
ln
a0
H2 a0
(6.4.18)
按流量相同,迭代可求q,h0或a0
32
33
坝下游有排水 设备的情况
水平排水体
坝体内的自由水面线 为一条抛物线。 抛物线焦点在排水体伸入坝体的端点,坐标原点设在焦 点。上游三角形仍用宽度等于ΔL的矩形代替。
L
m1 2m1 1
H1
(6.4.7)
上游垂直面bc和y轴截面间水平长度为L0,两截面间的 水头差为H1-h0,平均过水断面面积为(H1+h0)/2,通过 该坝段的渗流量为:
《地下水渗流力学 》
第6章 地下水渗流理论计算
第6章 地下水渗流理论计算
6.1 概 述 6.2 均值透水地基的渗流计算 6.3 多层透水地基渗流计算 6.4 不透水地基上土坝渗流计算 6.5 不透水地基上心墙坝渗流计算 6.6 库水位下降时心墙坝渗流计算(不讲) 补充:均质地基复杂地下轮廓线的渗流近似
m
由(3.3.7)式在 K相同条件下
2H x2
H H1
2
0
M m (M m)m
(6.2.2)
边界条件: x , H H1
x L, H H2
9
第一区段:
x L
2H x2
H
H1
2
0
M m (M m)m
大基6-3:计算理论

6.3.3 计算复杂性理论
• 计算复杂性: 用计算机求解问题的难易程度 • 度量标准 :
• 1、计算所需的步数或指令条数即时间复杂度 • 2、计算所需的存储单元数量即空间复杂度
6.3.2 可计算性理论
3.判定性问题 • 判定问题是无穷多个同类个别问题的总称。
• 例如,2是不是素数?6是不是素数?这些都是个别问题 • 把这类个别问题概括起来,就得到一个判定问题:任意给定的
正整数是不是素数? • 这里的正整数集合称为该判定问题的域,给定域中的一个元素,
判定问题就对应一个个别问题。
6.3 计算理论
• 问题求解的计算过程
6.3.1计算模型及计算能力
• 从20世纪30年代开始,为了讨论所有问题是否都有求解的算法, 数学家和逻辑学家从不同角度提出了几种不同的算法概念精确 化定义。
1935
邱奇提出 λ转换演算
1936
哥德尔等定 义递归函数
1936 1943
图灵和波斯特各 自提出抽象计算 机模型
• 停机问题的关键:能否找到一个测试程序,这个测试程序能判 定任何一个程序在给定的输入下能否终止。
• 数学反证法证明:先假设存在这样的测试程序,然后再构造一 个程序,该测试程序不能测试
• 假设存在一个测试程序T,它能接受任何输入。
• 当输入程序P能终止,输出1;
•
P不能终止,输出0。
6.3.2 可计算性理论
• 可计算性的特征包括: • 确定性:由相同的初始条件,得到相同的结果。 • 有限性:能在有限时间内,在有限设备上执行。 • 机械性:每一个计算过程的执行都是“机械的”或“构造的”, 且可以被精确地描述 • 可执行性:计算过程的语句甚至是有限的,且自身能被表示为 自然数 • 终止性:接收初始输入后能否达到停机状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
18
6.2.1 P类
13
6.1.4 复杂性类
定义6-6 设t:NN是一个函数,定义时间复杂 性类DTIME(t(n))为 DTIME(t(n))={L|L是由一个由O(t(n))时间的 图灵机识别的语言}。 定义6-7 设s:NN是一个函数,定义空间复杂 性类DSPACE(s(n))为 DSPACE(s(n))={L|L是由一个由O(s(n))空间 的图灵机识别的语言}。
29
6.2.3 多项式时间归约
例:给定一个图G=(N,E),2可着色问题需要判定一个全 函数f:N{1,2},存在着:当<u,v>∈E时,f(u)≠f(v)。 如果不想设计一个多项式时间算法来解决该问题,那么 可以将其多项式时间归约到一个已知的P类问题。 为每一个节点ni赋一个布尔变量xi,对每一条边(ui,vj), 有(xi∨xj)和(﹁xi∨﹁xj),即两个变量不能同时为true或同 时为false。
6.2.3 多项式时间归约
定理6-18LA与LB是两个语言,若LA≤PLB,且LB∈P, 则LA∈P。 证明:设M是判定LB的多项式 时间算法,f是从LA到LB的 多项式时间归约。判定LA的多项式时间算法MA如下: 对于输入w, 步1 计算f(w); 步2 在输入f(w)上运行M,输出M的输出。 因为w∈LA ≡ f(w) ∈LB,又f、M都是多项式时间可计算 的,所以MA也是多项式时间可完成的。
33
6.2.4 NP类
定理6-16 一个语言在NP中,当且仅当它能被 某个非确定型多项式时间的图灵机判定。 证明:首先证明若L∈NP,则存在非确定型多 项式时间的图灵机判定它。因为L∈NP,所以 存在L的多项式时间的验证机V,构造非确定型 图灵机N如下:设输入为w, 步1 非确定地选择长为nk的字符串c; 步2 在输入<w,c>上运行V; 步3 若V接受,则接受;否则拒绝。
30
6.2.3 多项式时间归约
定理:任意语言B,B≠Ф,B≠∑*,对于任意的P类中 的语言A,A≤PB。 证明:用y表示B中的一个句子,z表示Bc中的一个句子 (根据B的定义,y和z必然存在),定义函数f:
由于A是多项式时间可判定的,f是全的多项式时间可计 算函数。又: ,因此f是A到B的多项 式时间归约。 31
21
6.2.2 可归约性
称一个语言A可归约到另一个语言B:如果存在一 个算法可以判定某个句子属于语言B,则存在另 一个算法来判定某个句子属于语言A。
22
6.2.2 可归约性
称语言A是映射可归约(或m-可归约)到语言B (用A≤mB来表示):当存在一个全可计算函数, 对于任意的x∈∑*,有:
12
6.1.3 算法分析
【例6-5】 自然数的二进制表示转变为一进制表示。 图灵机T1的设计如下:设输入为:a0a1a2…an-1(ai{0,1}),则输 出为am,其中m=Σai2i (i:0~n-1) 。T1有两条工作带x和y, T1的工作过程如下: (1)在x上写一个a; (2)若输入为空格,则停机; (3)若输入为1,工作带x的内容送至输出带,并把x的内 容在y上抄两遍,然后用y 的内容覆盖原x的内容,清除y; 否则若输入符号为0时,只把x的内容在y上抄两遍,然后用 y 的内容覆盖原x的内容; (4)转至步(2)。
第6章 复杂性问题 的分类
杨 莹,冷芳玲
1
6.1 图灵机计算复杂性量度
复杂性的量度 复杂性量度的记法 算法分析 复杂性类
2
6.1 图灵机计算复杂性量度
6.1.1 复杂性的量度 1.空间复杂度 2.时间复杂性 3.巡回复杂性
3
6.1.1 复杂性的量度
1.空间复杂度
定义6-1 令M是一个对于所有输入都停机的离线图灵机, s : NN 是一个函数。如果对于每个长度为 n 的输入 字, M 在任一条存贮带(或工作带)上至多扫视 s(n) 个单元,那么称M是s(n)空间有界图灵机,或称M具有 空间复杂度s(n)。
11
6.1.3 算法分析
【例6-4】 考虑接受语言 L = {WCWR |W{0|1}*} 的图灵机的复杂性。 存在另一个图灵机M2,它接受L,具有空间复杂度 log2n。M2用二条工作带来作二进制计数器,首先, 检查输入,看看是否只出现一个C,以及C左边和 右边的符号数是否相等。然后,逐个字符地比较C 左边和右边的字,同时用上述计数器找出对应的 符号,如果它们不一致,M2停机且不接受,如果 所有的符号都一致,M2就接受。
则称f(n)=O(g(n))。此时,g(n)是f(n)渐近增长的一个上 界。
7
6.1.2 复杂性量度的记法
定义6-5 设f和g是两个函数,f、g:NR+,称 f(n)=o(g(n)),如果有
8
6.1.2 复杂性量度的记法
【例6-3】不难验证下面各式具有o关系: n2=o(n3) n=o(nloglogn) nlogn=o(n2)
4
6.1.1 复杂性的量度
2.时间复杂性
定义6-2 设M是一个对于所有输入都停机的确定图灵机, t:NN是一个函数。如果对于每个长度为n的输入, M在停机前最多做t(n)动作(步骤),那么就称M是一 个t(n)时间有界的图灵机,或称M 具有时间复杂度 t(n) 。
5
6.1.1 复杂性的量度
3.巡回复杂性
34
6.2.4 NP类
下面证明若L有非确定型多项式时间的图灵机 N接受它,则L∈NP。为此,构造多项式时 间的验证机V如下: 对于输入<w,c>, 步1 在输入w上模拟N,把c的每一个符号看 作是对每一步所作的非确定性选择的描述; 步2 若N的该计算分支接受,则接受;否则 拒绝。
35
6.2.4 NP类
由于A是可判定的,f是全的可计算函数。 又: ,因此f是A到B的m归约。
27
6.2.3 多项式时间归约
定义6-15 称语言LA多项式时间映射可归约 到语言LB,或简称为多项式时间可归约到LB, 记为 LA≤P LB, 若存在多项式时间可计算函数f:∑* ∑*, 对于每一个w,有 w∈LA ≡ f(w)∈LB 称函数f为LA到LB多项式时间归约。 28
14
6.1.4 复杂性类
定义6-8 设t:NN是一个函数,定义非确定时 间复杂性类NTIME(t(n))为 NTIME(t(n))={L|L是由一个由O(t(n))时间的 非确定图灵机识别的语言}。 定义6-9 设s:NN是一个函数,定义非确定空 间复杂性类NSPACE(s(n))为 NSPACE(s(n))={L|L是由一个由O(s(n))空间 的非确定图灵机识别的语言}。
9
6.1.2 复杂性量度的记法
6-6
10
6.1.3 算法分析
【例6-4】 考虑接受语言 L = {WCWR |W{0|1}*} 的图灵机的复杂性。
语言L具有时间复杂度O(n),因为存在一个图灵机M, 它具有两条带,并把C左边的内容复制到第二条带 上,然后当遇到C时,M第二带的读头向左,经过 它刚刚复制的字符串,回至第二带的开始位臵, 向右比较输入带C右侧的字符和第二带的字符,如 果每对字符都相同,且C左边的符号数相等,那么 M接受。易见,如果输入长度是n,则M最多做 n+1个动作。
【例6-8】有向图中两个节点的连通性判定问题是 P类问题。 证明:设有向图G= <V, E>,s, t ∈ V,n=|V|。不 失一般性可设G是简单图。下面是该问题的判定 算法。 步1 标记节点s; 步2 重复步2.1直至不再有节点需要标记: 步2.1 扫描G的所有边。如果找到一条边(u, v),u、 v∈V,u被标记,而v未被标记,则标记v; 步3 若t被标记,则接受;否则拒绝。
NP类是重要的,因为它包含许多具有实际意义的问题。 如前面的Hamilton路问题,它的验证机设计如下: 对于输入图G,节点s、t, 步1 写一列m 个数,v1,v2,…,vm,m是G的节点数,列中的每 一数,都是从1到m中非确定挑选的; 步2 在列中检查重复性,若发现重复,则拒绝; 步3 检查s=v1,t=vm是否成立。若有一个不成立,则拒绝; 步4 对于i=1,2,…,m-1,检查(vi,vi+1)是否是G的边,若都是 G的边,则接受;否则拒绝。
24
6.2.2 可归约性
例:证明语言Lhalt-e={T:T(e)停机},即计算图灵机在空句 子e上停机,是不可判定的。 语言Lhalt是已知的不可判定问题,上述问题的证明可以 通过语言Lhaltm-归约到语言Lhalt-e来证明。 给定任意图灵机T和任意输入x,总是存在一个图灵机T ’, 在T ’上运行空句子,即T ’(e)停机,当且仅当T(x)停机。 具体做法如下:T ’将x存储在内部(由于x是有限的,一定 可以做到),首先将x写到输入带上,然后开始模拟T,显 然这种从<T, x>到T ’的转换是一个m-归约。
则函数被称为A与B之间的m-归约。 使用适当的m-归约可以解决许多不可判定问题的 证明。
23
6.2.2 可归约性
引理:如果L1 ≤mL2,并且L1是不可判定的,则L2 也是不可判定的。 证明:假设存在图灵机T2判定L2,并且从L1到L2的 归约函数为 。计算(x),然后使用T2 来验证是 否有(x)∈L2,从而判定x∈L1,或者xL1。由于 L1是不可判定的,因此T2不可能存在,L2也不能 被判定。