Vacuum Instability in Low-Energy Supersymmetry Breaking Models
自动化专业英语常用词汇

自动化专业英语常用词汇acceleration transducer 加速度传感器accumulated error 累积误差AC-DC-AC frequency converter交-直-交变频器AC (alternating current) electric drive 交流电子传动active attitude stabilization 主动姿态稳定adjoint operator 伴随算子admissible error 容许误差amplifying element 放大环节analog-digital conversion 模数转换operational amplifiers运算放大器aperiodic decomposition 非周期分解approximate reasoning 近似推理a priori estimate 先验估计articulated robot 关节型机器人asymptotic stability 渐进稳定性attained pose drift 实际位姿漂移attitude acquisition 姿态捕获AOCS (attitude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度attitude disturbance 姿态扰动automatic manual station 自动-手动操作器automaton 自动机base coordinate system 基座坐标系bellows pressure gauge 波纹管压力表 gauge测量仪器black box testing approach 黑箱测试法bottom-up development 自下而上开发boundary value analysis 边界值分析brainstorming method 头脑风暴法CAE (computer aided engineering) 计算机辅助工程CAM (computer aided manufacturing) 计算机辅助制造capacitive displacement transducer 电容式位移传感器capacity电容 displacement 位移capsule pressure gauge 膜盒压力表rectangular coordinate system直角坐标系cascade compensation 串联补偿using series or parallel capacitors用串联或者并联的电容chaos 混沌calrity 清晰性classical information pattern 经典信息模式classifier 分类器clinical control system 临床控制系统closed loop pole 闭环极点 open loop 开环closed loop transfer function 闭环传递函数c ombined pressure and vacuum gauge 压力真空表command pose 指令位姿companion matrix 相伴矩阵compatibility 相容性,兼容性compensating network 补偿网络Energy is conserved in all of its forms能量是守恒的compensation 补偿,矫正conditionally instability 条件不稳定性configuration 组态connectivity 连接性conservative system 守恒系统consistency 一致性constraint condition 约束条件control accuracy 控制精度Gyroscope陀螺仪control panel 控制屏,控制盘control system synthesis 控制系统综合corner frequency 转折频率coupling of orbit and attitude 轨道和姿态耦合critical damping 临界阻尼临界criticalDamper阻尼器critical stability 临界稳定性cross-over frequency 穿越频率,交越频率cut-off frequency 截止频率cybernetics 控制论cyclic remote control 循环遥控 cycle 循环 cycliccylindrical robot 圆柱坐标型机器人damped oscillation 阻尼振荡oscillation 振荡;振动;摆动damper 阻尼器damping ratio 阻尼比 ratio 比data acquisition 数据采集data preprocessing 数据预处理data processor 数据处理器D controller 微分控制器微分控制:Differential control 积分控制:integral control 比例控制:proportional controldescribing function 描述函数desired value 希望值真值:truth values 参考值:reference value destination 目的站detector 检出器deviation 偏差deviation alarm 偏差报警器differential dynamical system 微differential pressure level meter 差压液位计 meter=gauge 仪表 differential 差别的微分的differential pressure transmitter 差压变送器differential transformer displacement transducer 差动变压器式位移传感器differentiation element 微分环节digital filer 数字滤波器 filter 滤波器digital signal processing 数字信号处理dimension transducer 尺度传感器discrete system simulation language 离散系统仿真语言 discrete离散的不连续的displacement vibration amplitude transducer 位移振幅传感器幅度:amplitudedistrubance 扰动disturbance compensation 扰动补偿diversity 多样性divisibility 可分性domain knowledge 领域知识dominant pole 主导极点零点zero调制:modulation ;modulate 解调:demodulationcountermodulationduty ratio负载比dynamic characteristics 动态特性dynamic deviation 动态偏差dynamic error coefficient 动态误差系数dynamic input-output model 动态投入产出模型Index指数eddy current thickness meter 电涡流厚度计 meter 翻译成计 gauge 翻译成表electric conductance level meter 电导液位计electromagnetic flow transducer 电磁流量传感器electronic batching scale 电子配料秤 scale 秤electronic belt conveyor scale 电子皮带秤electronic hopper scale 电子料斗秤elevation 仰角 depression 俯角equilibrium point 平衡点error 误差estimate 估计量estimation theory 估计理论expected characteristics 希望特性failure diagnosis 故障诊断feasibility study 可行性研究feasible 可行的feasible region 可行域feature detection 特征检测feature extraction 特征抽取feedback compensation 反馈补偿Feed forward path 前馈通路前馈:feed forward 反馈feedbackFMS (flexible manufacturing system) 柔性制造系统柔性:flexible 刚性:rigidity bending deflection 弯曲挠度 deflect 偏向偏离flow sensor/transducer 流量传感器flow transmitter 流量变送器forward path 正向通路frequency converter 变频器frequency domain model reduction me thod 频域模型降阶法频域frequency response 频域响应functional decomposition 功能分解FES (functional electrical stimulation) 功能电刺激stimulate 刺激functional simularity 功能相似fuzzy logic模糊逻辑generalized least squares estimation 广义最小二乘估计geometric similarity 几何相似global optimum 全局最优goal coordination method 目标协调法graphic search 图搜索guidance system 制导系统gyro drift rate 陀螺漂移率gyrostat 陀螺体Hall displacement transducer 霍尔式位移传感器horizontal decomposition横向分解hydraulic step motor 液压步进马达I controller 积分控制器 integral 积分identifiability 可辨识性image recognition 图像识别impulse 冲量impulse function 冲击函数,脉冲函数index of merit 品质因数 index 指数inductive force transducer 电感式位移传感器感应的inductive 电感:inductance industrial automation 工业自动化inertial attitude sensor 惯性姿态敏感器inertial coordinate system 惯性坐标系information acquisition 信息采集infrared gas analyzer 红外线气体分析器 infrared 红外线红外线的ultraviolet ray紫外线的 visible light可见光inherent nonlinearity 固有非线性inherent regulation 固有调节initial deviation 初始偏差input-output model 投入产出模型instability 不稳定性integrity 整体性intelligent terminal 智能终端internal disturbance 内扰invariant embedding principle 不变嵌入原理inverse Nyquist diagram 逆奈奎斯特图investment decision 投资决策joint 关节knowledge acquisition 知识获取knowledge assimilation 知识同化knowledge representation 知识表达lag-lead compensation 滞后超前补偿Laplace transform 拉普拉斯变换large scale system 大系统least squares criterion 最小二乘准则 criterion 准则linearization technique 线性化方法linear motion electric drive 直线运动电气传动linear motion valve 直行程阀linear programming 线性规划load cell 称重传感器local optimum 局部最优local 局部log magnitude-phase diagram 对数幅相图magnitude大小的程度amplitude振幅long term memory 长期记忆Lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理magnetoelastic weighing cell 磁致弹性称重传感器magnitude-frequency characteristic 幅频特性magnitude margin 幅值裕度 margin 边缘magnitude scale factor 幅值比例尺manipulator 机械手man-machine coordination 人机协调MAP (manufacturing automation protocol) 制造自动化协议 protocol 协议marginal effectiveness 边际效益Mason‘‘s gain formula 梅森增益公式matching criterion 匹配准则maximum likelihood estimation 最大似然估计maximum overshoot 最大超调量maximum principle 极大值原理mean-square error criterion 均方误差准则minimal realization 最小实现minimum phase system 最小相位系统minimum variance estimation 最小方差估计model reference adaptive control system 模型参考适应控制系统model verification 模型验证modularization 模块化MTBF (mean time between failures) 平均故障间隔时间 mean 平均MTTF (mean time to failures) 平均无故障时间multiloop control 多回路控制multi-objective decision 多目标决策Nash optimality 纳什最优性nearest-neighbor 最近邻necessity measure 必然性侧度negative feedback 负反馈neural assembly 神经集合neural network computer 神经网络计算机Nichols chart 尼科尔斯图Nyquist stability criterion 奈奎斯特稳定判据objective function 目标函数on-line assistance 在线帮助on-off control 通断控制optic fiber tachometer 光纤式转速表optimal trajectory 最优轨迹optimization technique 最优化技术order parameter 序参数orientation control 定向控制oscillating period 振荡周期周期:period cycleoutput prediction method 输出预估法oval wheel flowmeter 椭圆齿轮流量计Over damping 过阻尼underdamping 欠阻尼PR (pattern recognition) 模式识别P control 比例控制器peak time 峰值时间penalty function method 罚函数法perceptron 感知器phase lead 相位超前 phase lag相位滞后Photoelectri c光电 tachometric transducer 光电式转速传感器piezoelectric force transducer 压电式力传感器PLC (programmable logic controller) 可编程序逻辑控制器plug braking 反接制动pole assignment 极点配置pole-zero cancellation 零极点相消polynomial input 多项式输入portfolio theory 投资搭配理论pose overshoot 位姿过调量position measuring instrument 位置测量仪posentiometric displacement transducer 电位器式位移传感器positive feedback 正反馈power system automation 电力系统自动化pressure transmitter 压力变送器primary frequency zone 主频区priority 优先级process-oriented simulation 面向过程的仿真proportional control 比例控制proportional plus derivative controller 比例微分控制器pulse duration 脉冲持续时间pulse frequency modulation control system 脉冲调频控制系统:frequency modulation 频率调制调频pulse width modulation control system 脉冲调宽控制系统PWM inverter 脉宽调制逆变器QC (quality control) 质量管理quantized noise 量化噪声ramp function 斜坡函数random disturbance 随机扰动random process 随机过程rate integrating gyro 速率积分陀螺real time telemetry 实时遥测receptive field 感受野rectangular robot 直角坐标型机器人redundant information 冗余信息regional planning model 区域规划模型regulating device 调节装载regulation 调节relational algebra 关系代数remote regulating 遥调reproducibility 再现性resistance thermometer sensor 热电阻电阻温度计传感器response curve 响应曲线return difference matrix 回差矩阵return ratio matrix 回比矩阵revolute robot 关节型机器人revolution speed transducer 转速传感器rewriting rule 重写规则rigid spacecraft dynamics 刚性航天动力学 dynamics 动力学robotics 机器人学robot programming language 机器人编程语言robust control 鲁棒控制robustness 鲁棒性root locus 根轨迹roots flowmeter 腰轮流量计rotameter 浮子流量计,转子流量计sampled-data control system 采样控制系统sampling control system 采样控制系统saturation characteristics 饱和特性scalar Lyapunov function 标量李雅普诺夫函数s-domain s域self-operated controller 自力式控制器self-organizing system 自组织系统self-reproducing system 自繁殖系统self-tuning control 自校正控制sensing element 敏感元件sensitivity analysis 灵敏度分析sensory control 感觉控制sequential decomposition 顺序分解sequential least squares estimation 序贯最小二乘估计servo control 伺服控制,随动控制servomotor 伺服马达settling time 过渡时间sextant 六分仪short term planning 短期计划short time horizon coordination 短时程协调signal detection and estimation 信号检测和估计signal reconstruction 信号重构similarity 相似性simulated interrupt 仿真中断simulation block diagram 仿真框图simulation experiment 仿真实验simulation velocity 仿真速度simulator 仿真器single axle table 单轴转台single degree of freedom gyro 单自由度陀螺翻译顺序呵呵spin axis 自旋轴spinner 自旋体stability criterion 稳定性判据stability limit 稳定极限stabilization 镇定,稳定state equation model 状态方程模型state space description 状态空间描述static characteristics curve 静态特性曲线station accuracy 定点精度stationary random process 平稳随机过程statistical analysis 统计分析statistic pattern recognition 统计模式识别steady state deviation 稳态偏差顺序翻译即可steady state error coefficient 稳态误差系数step-by-step control 步进控制step function 阶跃函数strain gauge load cell 应变式称重传感器subjective probability 主观频率supervisory computer control system 计算机监控系统sustained oscillation 自持振荡swirlmeter 旋进流量计switching point 切换点systematology 系统学system homomorphism 系统同态system isomorphism 系统同构system engineering 系统工程tachometer 转速表target flow transmitter 靶式流量变送器task cycle 作业周期temperature transducer 温度传感器tensiometer 张力计texture 纹理theorem proving 定理证明therapy model 治疗模型thermocouple 热电偶thermometer 温度计thickness meter 厚度计three-axis attitude stabilization 三轴姿态稳定three state controller 三位控制器thrust vector control system 推力矢量控制系统thruster 推力器time constant 时间常数time-invariant system 定常系统,非时变系统 invariant不变的time schedule controller 时序控制器time-sharing control 分时控制time-varying parameter 时变参数top-down testing 自上而下测试TQC (total quality control) 全面质量管理tracking error 跟踪误差trade-off analysis 权衡分析transfer function matrix 传递函数矩阵transformation grammar 转换文法transient deviation 瞬态偏差短暂的瞬间的transient process 过渡过程transition diagram 转移图transmissible pressure gauge 电远传压力表transmitter 变送器trend analysis 趋势分析triple modulation telemetering system 三重调制遥测系统turbine flowmeter 涡轮流量计Turing machine 图灵机two-time scale system 双时标系统ultrasonic levelmeter 超声物位计unadjustable speed electric drive 非调速电气传动unbiased estimation 无偏估计underdamping 欠阻尼uniformly asymptotic stability 一致渐近稳定性uninterrupted duty 不间断工作制,长期工作制unit circle 单位圆unit testing 单元测试unsupervised learing 非监督学习upper level problem 上级问题urban planning 城市规划value engineering 价值工程variable gain 可变增益,可变放大系数variable structure control system 变结构控制vector Lyapunov function 向量李雅普诺夫函数function 函数velocity error coefficient 速度误差系数velocity transducer 速度传感器vertical decomposition 纵向分解vibrating wire force transducer 振弦式力传感器vibrometer 振动计 vibrationVibrate振动viscous damping 粘性阻尼voltage source inverter 电压源型逆变器vortex precession flowmeter 旋进流量计vortex shedding flowmeter 涡街流量计WB (way base) 方法库weighing cell 称重传感器weighting factor 权因子weighting method 加权法Whittaker-Shannon sampling theorem 惠特克-香农采样定理Wiener filtering 维纳滤波w-plane w平面zero-based budget 零基预算zero-input response 零输入响应zero-state response 零状态响应z-transform z变换《信号与系统》专业术语中英文对照表第 1 章绪论信号(signal)系统(system)电压(voltage)电流(current)信息(information)电路(circuit)确定性信号(determinate signal)随机信号(random signal)一维信号(one–dimensional signal)多维信号(multi–dimensional signal)连续时间信号(continuous time signal)离散时间信号(discrete time signal)取样信号(sampling signal)数字信号(digital signal)周期信号(periodic signal)非周期信号(nonperiodic(aperiodic) signal)能量(energy)功率(power)能量信号(energy signal)功率信号(power signal)平均功率(average power)平均能量(average energy)指数信号(exponential signal)时间常数(time constant)正弦信号(sine signal)余弦信号(cosine signal)振幅(amplitude)角频率(angular frequency)初相位(initial phase)频率(frequency)欧拉公式(Euler’s formula)复指数信号(complex exponential signal)复频率(complex frequency)实部(real part)虚部(imaginary part)抽样函数 Sa(t)(sampling(Sa) function)偶函数(even function)奇异函数(singularity function)奇异信号(singularity signal)单位斜变信号(unit ramp signal)斜率(slope)单位阶跃信号(unit step signal)符号函数(signum function)单位冲激信号(unit impulse signal)广义函数(generalized function)取样特性(sampling property)冲激偶信号(impulse doublet signal)奇函数(odd function)偶分量(even component)偶数 even 奇数 odd 奇分量(odd component)正交函数(orthogonal function)正交函数集(set of orthogonal function)数学模型(mathematics model)电压源(voltage source)基尔霍夫电压定律(Kirchhoff’s voltage law(KVL))电流源(current source)连续时间系统(continuous time system)离散时间系统(discrete time system)微分方程(differential function)差分方程(difference function)线性系统(linear system)非线性系统(nonlinear system)时变系统(time–varying system)时不变系统(time–invariant system)集总参数系统(lumped–parameter system)分布参数系统(distributed–parameter system)偏微分方程(partial differential function)因果系统(causal system)非因果系统(noncausal system)因果信号(causal signal)叠加性(superposition property)均匀性(homogeneity)积分(integral)输入–输出描述法(input–output analysis)状态变量描述法(state variable analysis)单输入单输出系统(single–input and single–output system)状态方程(state equation)输出方程(output equation)多输入多输出系统(multi–input and multi–output system)时域分析法(time domain method)变换域分析法(transform domain method)卷积(convolution)傅里叶变换(Fourier transform)拉普拉斯变换(Laplace transform)第 2 章连续时间系统的时域分析齐次解(homogeneous solution)特解(particular solution)特征方程(characteristic function)特征根(characteristic root)固有(自由)解(natural solution)强迫解(forced solution)起始条件(original condition)初始条件(initial condition)自由响应(natural response)强迫响应(forced response)零输入响应(zero-input response)零状态响应(zero-state response)冲激响应(impulse response)阶跃响应(step response)卷积积分(convolution integral)交换律(exchange law)分配律(distribute law)结合律(combine law)第3 章傅里叶变换频谱(frequency spectrum)频域(frequency domain)三角形式的傅里叶级数(trigonomitric Fourier series)指数形式的傅里叶级数(exponential Fourier series)傅里叶系数(Fourier coefficient)直流分量(direct component)基波分量(fundamental component) component 分量n 次谐波分量(n th harmonic component)复振幅(complex amplitude)频谱图(spectrum plot(diagram))幅度谱(amplitude spectrum)相位谱(phase spectrum)包络(envelop)离散性(discrete property)谐波性(harmonic property)收敛性(convergence property)奇谐函数(odd harmonic function)吉伯斯现象(Gibbs phenomenon)周期矩形脉冲信号(periodic rectangular pulse signal)直角的周期锯齿脉冲信号(periodic sawtooth pulse signal)周期三角脉冲信号(periodic triangular pulse signal)三角的周期半波余弦信号(periodic half–cosine signal)周期全波余弦信号(periodic full–cosine signal)傅里叶逆变换(inverse Fourier transform)inverse 相反的频谱密度函数(spectrum density function)单边指数信号(single–sided exponential signal)双边指数信号(two–sided exponential signal)对称矩形脉冲信号(symmetry rectangular pulse signal)线性(linearity)对称性(symmetry)对偶性(duality)位移特性(shifting)时移特性(time–shifting)频移特性(frequency–shifting)调制定理(modulation theorem)调制(modulation)解调(demodulation)变频(frequency conversion)尺度变换特性(scaling)微分与积分特性(differentiation and integration)时域微分特性(differentiation in the time domain)时域积分特性(integration in the time domain)频域微分特性(differentiation in the frequency domain)频域积分特性(integration in the frequency domain)卷积定理(convolution theorem)时域卷积定理(convolution theorem in the time domain)频域卷积定理(convolution theorem in the frequency domain)取样信号(sampling signal)矩形脉冲取样(rectangular pulse sampling)自然取样(nature sampling)冲激取样(impulse sampling)理想取样(ideal sampling)取样定理(sampling theorem)调制信号(modulation signal)载波信号(carrier signal)已调制信号(modulated signal)模拟调制(analog modulation)数字调制(digital modulation)连续波调制(continuous wave modulation)脉冲调制(pulse modulation)幅度调制(amplitude modulation)频率调制(frequency modulation)相位调制(phase modulation)角度调制(angle modulation)频分多路复用(frequency–division multiplex(FDM))时分多路复用(time–division multiplex(TDM))相干(同步)解调(synchronous detection)本地载波(local carrier)载波系统函数(system function)网络函数(network function)频响特性(frequency response)幅频特性(amplitude frequency response)幅频响应相频特性(phase frequency response)无失真传输(distortionless transmission)理想低通滤波器(ideal low–pass filter)截止频率(cutoff frequency)正弦积分(sine integral)上升时间(rise time)窗函数(window function)理想带通滤波器(ideal band–pass filter)太直译了第 4 章拉普拉斯变换代数方程(algebraic equation)双边拉普拉斯变换(two-sided Laplace transform)双边拉普拉斯逆变换(inverse two-sided Laplace transform)单边拉普拉斯变换(single-sided Laplace transform)拉普拉斯逆变换(inverse Laplace transform)收敛域(region of convergence(ROC))延时特性(time delay)s 域平移特性(shifting in the s-domain)s 域微分特性(differentiation in the s-domain)s 域积分特性(integration in the s-domain)初值定理(initial-value theorem)终值定理(expiration-value)复频域卷积定理(convolution theorem in the complex frequency domain)部分分式展开法(partial fraction expansion)留数法(residue method)第 5 章策动点函数(driving function)转移函数(transfer function)极点(pole)零点(zero)零极点图(zero-pole plot)暂态响应(transient response)稳态响应(stable response)稳定系统(stable system)一阶系统(first order system)高通滤波网络(high-pass filter)低通滤波网络(low-pass filter)二阶系统(second order system)最小相位系统(minimum-phase system)高通(high-pass)带通(band-pass)带阻(band-stop)有源(active)无源(passive)模拟(analog)数字(digital)通带(pass-band)阻带(stop-band)佩利-维纳准则(Paley-Winner criterion)最佳逼近(optimum approximation)过渡带(transition-band)通带公差带(tolerance band)巴特沃兹滤波器(Butterworth filter)切比雪夫滤波器(Chebyshew filter)方框图(block diagram)信号流图(signal flow graph)节点(node)支路(branch)输入节点(source node)输出节点(sink node)混合节点(mix node)通路(path)开通路(open path)闭通路(close path)环路(loop)自环路(self-loop)环路增益(loop gain)不接触环路(disconnect loop)前向通路(forward path)前向通路增益(forward path gain)梅森公式(Mason formula)劳斯准则(Routh criterion)第 6 章数字系统(digital system)数字信号处理(digital signal processing)差分方程(difference equation)单位样值响应(unit sample response)卷积和(convolution sum)Z 变换(Z transform)序列(sequence)样值(sample)单位样值信号(unit sample signal)单位阶跃序列(unit step sequence)矩形序列 (rectangular sequence)单边实指数序列(single sided real exponential sequence)单边正弦序列(single sided exponential sequence)斜边序列(ramp sequence)复指数序列(complex exponential sequence)线性时不变离散系统(linear time-invariant discrete-time system)常系数线性差分方程(linear constant-coefficient difference equation)后向差分方程(backward difference equation)前向差分方程(forward difference equation)海诺塔(Tower of Hanoi)菲波纳西(Fibonacci)冲激函数串(impulse train)第 7 章数字滤波器(digital filter)单边 Z 变换(single-sided Z transform)双边 Z 变换(two-sided (bilateral) Z transform)幂级数(power series)收敛(convergence)有界序列(limitary-amplitude sequence)正项级数(positive series)有限长序列(limitary-duration sequence)右边序列(right-sided sequence)左边序列(left-sided sequence)双边序列(two-sided sequence)Z 逆变换(inverse Z transform)围线积分法(contour integral method)幂级数展开法(power series expansion)z 域微分(differentiation in the z-domain)序列指数加权(multiplication by an exponential sequence)z 域卷积定理(z-domain convolution theorem)帕斯瓦尔定理(Parseval theorem)传输函数(transfer function)序列的傅里叶变换(discrete-time Fourier transform:DTFT)序列的傅里叶逆变换(inverse discrete-time Fourier transform:IDTFT)幅度响应(magnitude response)相位响应(phase response)量化(quantization)编码(coding)模数变换(A/D 变换:analog-to-digital conversion)数模变换(D/A 变换:digital-to- analog conversion)第 8 章端口分析法(port analysis)状态变量(state variable)无记忆系统(memoryless system)有记忆系统(memory system)矢量矩阵(vector-matrix )常量矩阵(constant matrix )输入矢量(input vector)输出矢量(output vector)直接法(direct method)间接法(indirect method)状态转移矩阵(state transition matrix)系统函数矩阵(system function matrix)冲激响应矩阵(impulse response matrix)光学专业词汇大全Accelaration 加速度Myopia-near-sighted近视Sensitivity to Light感光灵敏度boost推进lag behind落后于Hyperopic-far-sighted远视visual sensation视觉ar Pattern条状图形approximate近似adjacent邻近的normal法线Color Difference色差V Signal Processing电视信号处理back and forth前后vibrant震动quantum leap量子越迁derive from起源自inhibit抑制,约束stride大幅前进obstruction障碍物substance物质实质主旨residue杂质criteria标准parameter参数parallax视差凸面镜 convex mirror凹面镜 concave mirror分光镜spectroscope入射角 angle of incidence出射角emergent angle平面镜 plane mirror放大率角度放大率angular magnification 放大率:magnification 折射 refraction反射 reflect干涉 interfere衍射 diffraction干涉条纹interference fringe衍射图像 diffraction fringe衍射条纹偏振polarize polarization透射transmission透射光 transmission light光强度] light intensity电磁波 electromagnetic wave振动杨氏干涉夫琅和费衍射焦距brewster Angle布鲁斯特角quarter Waveplates四分之一波片ripple波纹capacitor电容器vertical垂直的horizontal 水平的airy disk艾里斑exit pupil出[射光]瞳Entrance pupil 入瞳optical path difference光称差radius of curvature曲率半径spherical mirror球面镜reflected beam反射束YI= or your information供参考phase difference相差interferometer干涉仪ye lens物镜/目镜spherical球的field information场信息standard Lens标准透镜refracting Surface折射面principal plane主平面vertex顶点,最高点fuzzy失真,模糊light source 光源wavelength波长angle角度spectrum光谱diffraction grating衍射光栅sphere半球的DE= ens data editor Surface radius of curvature表面曲率半径surface thickness表面厚度semi-diameter半径focal length焦距field of view视场stop 光阑refractive折射reflective反射金属切削 metal cutting机床 machine tool tool 机床金属工艺学 technology of metals刀具 cutter摩擦 friction传动 drive/transmission轴 shaft弹性 elasticity频率特性 frequency characteristic误差 error响应 response定位 allocation动力学 dynamic运动学 kinematic静力学 static分析力学 analyse mechanics 力学拉伸 pulling压缩 hitting compress剪切 shear扭转 twist弯曲应力 bending stress强度 intensity几何形状 geometricalUltrasonic超声波精度 precision交流电路 AC circuit机械加工余量 machining allowance变形力 deforming force变形 deformation应力 stress硬度 rigidity热处理 heat treatment电路 circuit半导体元件 semiconductor element反馈 feedback发生器 generator直流电源 DC electrical source门电路 gate circuit逻辑代数 logic algebra磨削 grinding螺钉 screw铣削 mill铣刀 milling cutter功率 power装配 assembling流体动力学 fluid dynamics流体力学 fluid mechanics加工 machining稳定性 stability介质 medium强度 intensity载荷 load应力 stress可靠性 reliability精加工 finish machining粗加工 rough machining腐蚀 rust氧化 oxidation磨损 wear耐用度 durability随机信号 random signal离散信号 discrete signal超声传感器 ultrasonic sensor摄像头 CCD cameraLead rail 导轨合成纤维 synthetic fibre电化学腐蚀 electrochemical corrosion 车架 automotive chassis悬架 suspension转向器 redirector变速器 speed changer车间 workshop工程技术人员 engineer数学模型 mathematical model标准件 standard component零件图 part drawing装配图 assembly drawing刚度 rigidity内力 internal force位移 displacement截面 section疲劳极限 fatigue limit断裂 fracture 破裂塑性变形 plastic distortionelastic deformation 弹性变形脆性材料 brittleness material刚度准则 rigidity criterion齿轮 gearGrain 磨粒转折频率 corner frequency =break frequencyConvolution 卷积Convolution integral 卷积积分Convolution property 卷积性质Convolution sum 卷积和Correlation function 相关函数Critically damped systems 临界阻尼系统Crosss-correlation functions 互相关函数Cutoff frequencies 截至频率transistor n 晶体管diode n 二极管semiconductor n 半导体resistor n 电阻器capacitor n 电容器alternating adj 交互的amplifier n 扩音器,放大器integrated circuit 集成电路linear time invariant systems 线性时不变系统voltage n 电压,伏特数Condenser=capacitor n 电容器dielectric n 绝缘体;电解质electromagnetic adj 电磁的adj 非传导性的deflection n偏斜;偏转;偏差linear device 线性器件the insulation resistance 绝缘电阻anode n 阳极,正极cathode n 阴极breakdown n 故障;崩溃terminal n 终点站;终端,接线端emitter n 发射器collect v 收集,集聚,集中insulator n 绝缘体,绝热器oscilloscope n 示波镜;示波器gain n 增益,放大倍数forward biased 正向偏置reverse biased 反向偏置P-N junction PN结MOS(metal-oxide semiconductor)金属氧化物半导体enhancement and exhausted 增强型和耗尽型integrated circuits 集成电路analog n 模拟digital adj 数字的,数位的horizontal adj, 水平的,地平线的vertical adj 垂直的,顶点的amplitude n 振幅,广阔,丰富multimeter n 万用表frequency n 频率,周率the cathode-ray tube 阴极射线管dual-trace oscilloscope 双踪示波器signal generating device 信号发生器peak-to-peak output voltage 输出电压峰峰值sine wave 正弦波triangle wave 三角波square wave 方波amplifier 放大器,扩音器oscillator n 振荡器feedback n 反馈,回应phase n 相,阶段,状态filter n 滤波器,过滤器rectifier n整流器;纠正者band-stop filter 带阻滤波器band-pass filter 带通滤波器decimal adj 十进制的,小数的hexadecimal adj/n十六进制的binary adj 二进制的;二元的octal adj 八进制的domain n 域;领域code n代码,密码,编码v编码the Fourier transform 傅里叶变换Fast Fourier Transform 快速傅里叶变换microcontroller n 微处理器;微控制器assembly language instrucions n 汇编语言指令chip n 芯片,碎片modular adj 模块化的;模数的sensor n 传感器plug vt堵,塞,插上n塞子,插头,插销coaxial adj 同轴的,共轴的fiber n 光纤relay contact 继电接触器Artificial Intelligence 人工智能Perceptive Systems 感知系统neural network 神经网络fuzzy logic 模糊逻辑intelligent agent 智能代理electromagnetic adj 电磁的coaxial adj 同轴的,共轴的microwave n 微波charge v充电,使充电insulator n 绝缘体,绝缘物nonconductive adj非导体的,绝缘的simulation n 仿真;模拟prototype n 原型array n 排队,编队vector n 向量,矢量inverse adj倒转的,反转的n反面;相反v倒转high-performance 高精确性,高性能two-dimensional 二维的;缺乏深度的three-dimensional 三维的;立体的;真实的object-oriented programming面向对象的程序设计spectral adj 光谱的distortion n 失真,扭曲,变形wavelength n 波长refractive adj 折射的ivision Multiplexing单工传输simplex transmission半双工传输half-duplex transmission全双工传输full-duplex transmission电路交换 circuit switching数字传输技术Digital transmission technology灰度图像Grey scale images灰度级Grey scale level幅度谱Magnitude spectrum相位谱Phase spectrum频谱frequency spectrum相干解调coherent demodulation coherent相干的数字图像压缩digital image compression图像编码image encoding量化quantization人机交互man machine interface交互式会话Conversational interaction路由算法Routing Algorithm目标识别Object recognition话音变换Voice transform中继线trunk line传输时延transmission delay远程监控remote monitoring光链路optical linkhalf-duplex transmission 半双工传输accompaniment 伴随物,附属物reservation 保留,预定quotation 报价单,行情报告,引语memorandum 备忘录redundancy 备用be viewed as 被看作…be regards as 被认为是as such 本身;照此;以这种资格textual 本文的,正文的variation 变化,变量conversion 变化,转化。
原子能院电子直线加速器技术的研究与应用

VACUUMELECTRONICS•加速器专辑•原子能院电子直线加速器技术的研究与应用杨京鹤,王国宝,王修龙,曾自强,朱志斌,余国龙,佟迅华,张立锋,吴青峰,韩广D,刘保杰(中国原子能科学研究院核技术应用研究所"匕京102413)摘要:加速器技术作为核技术应用的源头技术之一,推动了核科学技术与应用的发展。
中国原子能科学研究院是中国核科学技术的发祥地,在中低能电子直线加速器研究与应用方面进行了持续研究,取得了多项成果,研究开发了具有自主知识产权、型谱化、系列化的无损检测电子直线加速器和电子辐照直线加速器,在工业、农业、安全等领域得到了有效应用,在我国国防建设、国民经济发展中发挥了重要作用%关键8:直线加速器;电子束;无损检测;电子辐照中图分类号:TL53文献标志码:A文章编号:1002-8935(2021)01-0011-03doi:10.16540/11-2485/tn.2021.01.02Research and Application of Electron Linear Accelerator Technology at CIAEYANG Jing-he,WANG Guo-bao,WANG Xiu-ong,ZENG Zi-qiang,ZHU Zhi-bin,YU Guo-long, TONG Xun-hua,ZHANG Li-feng,WU Qing-feng,HAN Guang-wen,LIU Bao-jie (..Department of Nuclear Technology Application,China Institute of Atomic Energy,Beijing102413,China)Abstract:Accelerator is one of the source technologies of nuclear technology application,which promotes the development of nuclear science technology and application.China Institute of Atomic Energy is the birthplace of nuclear science technology in China.The low-energy and medium-energy electron linear accelerator technologies were researched and developed there.Serial non-destructive test and irradiation linear accelerators with independent intellectual property rights had been developed successfully.They are used in many fields such as industry,agriculture,security,etc.,and play important roles in China's national defense construction and national economic development.Keywords:Linear accelerator,Electron beam,Non-destructive testing,Electron irradiation电子加速器是研究开发历史最早的粒子加速器类型,在核科学与技术领域发重用%20世纪40年代以来,,波技术的快速进步,采用射频微波电子的电子器取式发展,在大型高能器科研设施和紧凑的中低能应用型器方到应用%原子能科研究低能电子器方的研究较早,并在80年代开始进行科技成果转化,攻克了一批技术难题,研发了一批具的电子器装置,t电子器在民用领域的发展,本文综述原子能电子直线加速器技术方面的研究与应用情况%1原子能院电子直线加速器的发展背景原子能的电子器技术用国防与科研领域(1),,民经济的发展,工业、医疗、农业等领域对应用型器的需求日趋强烈,在20世纪80年代,原子能器团队在强流短脉冲电子器研究等项目的基础上,提岀无损探伤器和电子辐器两个方向的科技化。
南大宽禁带半导体实验室
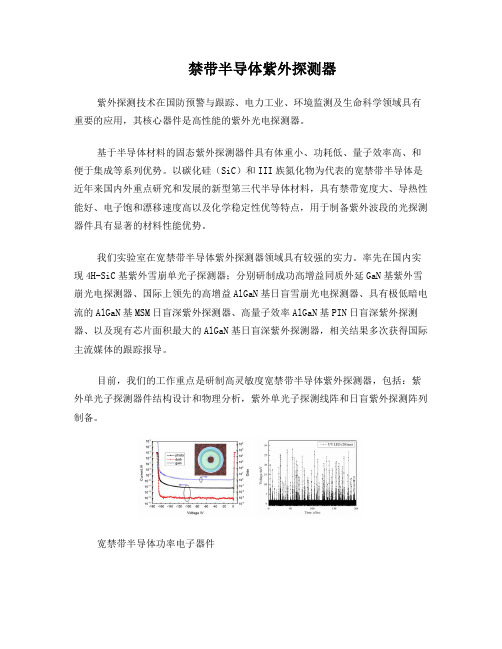
禁带半导体紫外探测器紫外探测技术在国防预警与跟踪、电力工业、环境监测及生命科学领域具有重要的应用,其核心器件是高性能的紫外光电探测器。
基于半导体材料的固态紫外探测器件具有体重小、功耗低、量子效率高、和便于集成等系列优势。
以碳化硅(SiC)和III族氮化物为代表的宽禁带半导体是近年来国内外重点研究和发展的新型第三代半导体材料,具有禁带宽度大、导热性能好、电子饱和漂移速度高以及化学稳定性优等特点,用于制备紫外波段的光探测器件具有显著的材料性能优势。
我们实验室在宽禁带半导体紫外探测器领域具有较强的实力。
率先在国内实现4H-SiC基紫外雪崩单光子探测器;分别研制成功高增益同质外延GaN基紫外雪崩光电探测器、国际上领先的高增益AlGaN基日盲雪崩光电探测器、具有极低暗电流的AlGaN基MSM日盲深紫外探测器、高量子效率AlGaN基PIN日盲深紫外探测器、以及现有芯片面积最大的AlGaN基日盲深紫外探测器,相关结果多次获得国际主流媒体的跟踪报导。
目前,我们的工作重点是研制高灵敏度宽禁带半导体紫外探测器,包括:紫外单光子探测器件结构设计和物理分析,紫外单光子探测线阵和日盲紫外探测阵列制备。
宽禁带半导体功率电子器件针对未来高效电力管理系统、电动汽车和广泛军事应用大容量化、高密度化和高频率化的要求,将宽禁带半导体材料应用于高档次功率电子器件可以有效解决当今功率电子器件发展所面临的“硅极限”(silicon limit)问题,将大幅度降低电能转换过程中的无益损耗,在各领域创造可观的节能空间。
宽禁带Ⅲ族氮化物半导体具有强击穿电场、高饱和漂移速度、高热导率和良好化学稳定性等系列材料性能优势,是制备新一代功率电子器件的理想材料。
这一研究方向近年来成为国际上继GaN基发光二极管和微波功率器件之后的新兴研究热点。
我们小组在这一研究领域具有较好的基础,已经研制成功AlGaN/GaN平面功率二极管,其击穿电压大于1100V,功率优值系数高达280MW/cm2。
真空技术 真空计 皮拉尼真空计的规范、校准和测量不确定度-最新国标
真空技术真空计皮拉尼真空计的规范、校准和测量不确定度1 范围本文件给出了皮拉尼真空计的参数,描述了其校准步骤,规定了使用这些真空计时要考虑的测量不确定度。
本文件适用于工作压力范围为 0.01 Pa ~150 kPa 的皮拉尼真空计。
当对皮拉尼真空计进行校准并将其用作参考标准时,本文件是对GB/T 34873 和 ISO 27893的补充。
另外,本文件描述了皮拉尼真空计响应时间和迟滞的表征方法。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 34873-2017 真空计与标准真空计直接比较校准(ISO 3567:2011,IDT)ISO 27893 真空计与标准真空计直接比较校准结果的不确定度评定(Vacuum technology —Vacuum gauges —Evaluation of the uncertainties of results of calibrations by direct comparison with a reference gauge)注:G B/T 34876-2017 真空计与标准真空计直接比较校准结果的不确定度评定(ISO 27893:2011,IDT)ISO/IEC 17025 检测和校准实验室能力的通用要求(General requirements for the competence of testing and calibration laboratories)注:G B/T 27025-2019 检测和校准实验室能力的通用要求(ISO/IEC 17025:2017,IDT)3 术语和定义下列术语和定义适用于本文件。
部组件定义3.1.1热传导真空计 thermal conductivity gauge通过测量保持不同温度的两个固定元件表面间的热量传递来确定压力的一种真空计。
流体力学英语词汇

流体力学英语词汇acceleration 加速度average velocity 平均速度Bernoulli 伯努力boundary layer 边界层calculus 微积分coefficient of viscosity 粘性系数compressible(incompressible) (不)可压的conservation of mass(momentum, energy) 质量(动量,能量)守恒continuum 连续介质control-volume 控制体density(mass per unit volume) 密度differential 微分dimension 量刚尺度dynamics 动力学Euler 欧拉eulerian (lagrangian) method of description欧拉(拉格郎日)观点,方法field of flow 流场flow pattern 流型(谱)fluid mechanics 流体力学function 函数inertia 惯性, 惯量integral 积分kinematics 运动学kinetic (potential, internal) energy 动(势,内)能Lagrange 拉格郎日liquid 流体Newtonian fluids 牛顿流体(non)linear (非)线性(non)uniform (非)均匀one-dimensional 一维pathline 迹线perfect-gas law 理想气体定律pressure 压力压强Reynolds 雷诺shear(normal) stress 剪(正)应力solution 解答statics 静力学steady(unsteady) (非)定常strain 应变streamline(tube) 流线(管)thermal conductivity 热传导thermodynamics 热力学variable 变量vector 矢量velocity distribution 速度分布velocity field 速度场velocity gradient 速度梯度viscous(inviscid) (无)粘性的volume rate of flow 体积流量CHAPTER -2absolute (gage,vacuum) pressure 绝对(表,真空)压力area moment of inertia 惯性面积矩atmospheric pressure 大气压力barometer 气压计body force 体力Cartesian [rectangular] coordinates 直角坐标(系)centroid 质心elliptic 椭圆的equilibrium 平衡horizontal 水平的hydrostatic 水静力学,流体静力学hyperbolic 双曲线的mercury 水银moment 矩parabolic 抛物线plane (curved) surface 平(曲)面plate 板pressure center 压力中心pressure distribution(gradient) 压力分布(梯度) reservoir 水库rigid-body 刚体scalar 标量specific weight 比重surface force 表面力vertical 垂直的, 直立的CHAPTER -3Bernoulli equation 伯努力方程Boundaries 边界Conservation of mass 质量Control volume 控制体Energy(hydraulic) grade line 能级线Flux 流率Free body 隔离体Heat transfer 热传到Imaginary 假想Inlet, outlet 进,出口Integrand 被积函数Jet flow 射流Linear(Angular)-momentum relation 线(角)动量关系式Momentum(energy)-flux 动量(能量)流量Net force 合力No slip 无滑移Nozzle 喷嘴Rate of work 功率Reynolds transport theorem 雷诺输运定理Shaft work 轴功Stagnation enthalpy 制止焓Surroundings 外围System 体系Time derivative 时间导数Vector sum 矢量合Venturi tube 文图里管Volume(mass) flow 体积(质量)流量Volume(mass) rate of flow体积(质量)流率CHAPTER -4Soomth 平滑Laminar 层流Transition 转捩Roughness 粗糙度Random fluctuations 随机脉动Reynolds number 雷诺数(Re)Instability 不稳定性Breakdown 崩溃Mean value 平均值Drag 阻力Osborne ReynoldsDye filament 染色丝Internal (external) flow 内(外)流Cartesian 笛卡坐标Infinitesimal 无限小local acceleration 当地加速度dot product 点乘total derivative 全导数convective acceleration 对流加速度substantial(material) derivative 随体(物质)导数operator 算子partial differential equation 偏微分方程Newtonian fluid 牛顿流体Navier-Stokes Equations N-S方程Second-order 二阶Similarity 相似Nondimensionalization 无量纲化Flat-plate boundary layer 平板边界层Thermal conductivity 热传导Heat flow 热流量Fourier's law 傅立叶定律Couette Flow 库塔流动Channel 槽道Parallel plates 平行平板Pressure gradient 压力梯度No-slip condition 无滑移条件Poiseuille flow 伯肖叶流动Parabola 抛物线Wall shear stress 壁面剪应力Prandtl 普朗特Karman 卡门Momentum-integral relation 动量积分关系Momentum thickness 动量厚度Skin-friction coefficient 壁面摩擦系数Displacement thickness 排移厚度Blasius equation 布拉修斯方程Coordinate transformation 坐标变换Composite dimensionless variable 组合无量纲变量Shape factor 形状因子Velocity profile 速度剖面流体动力学 fluid dynamics连续介质力学 mechanics of continuous media介质 medium流体质点 fluid particle无粘性流体 nonviscous fluid, inviscid fluid连续介质假设 continuous medium hypothesis流体运动学 fluid kinematics水静力学 hydrostatics液体静力学 hydrostatics支配方程 governing equation伯努利方程 Bernoulli equation伯努利定理 Bernonlli theorem毕奥-萨伐尔定律 Biot-Savart law欧拉方程 Euler equation亥姆霍兹定理 Helmholtz theorem开尔文定理 Kelvin theorem涡片 vortex sheet库塔-茹可夫斯基条件 Kutta-Zhoukowski condition 布拉休斯解 Blasius solution达朗贝尔佯廖 d'Alembert paradox雷诺数 Reynolds number施特鲁哈尔数 Strouhal number随体导数 material derivative不可压缩流体 incompressible fluid质量守恒 conservation of mass动量守恒 conservation of momentum能量守恒 conservation of energy动量方程 momentum equation能量方程 energy equation控制体积 control volume液体静压 hydrostatic pressure 涡量拟能 enstrophy压差 differential pressure流[动] flow流线 stream line流面 stream surface流管 stream tube迹线 path, path line流场 flow field流态 flow regime流动参量 flow parameter流量 flow rate, flow discharge 涡旋 vortex涡量 vorticity涡丝 vortex filament涡线 vortex line涡面 vortex surface涡层 vortex layer涡环 vortex ring涡对 vortex pair涡管 vortex tube涡街 vortex street卡门涡街 Karman vortex street 马蹄涡 horseshoe vortex对流涡胞 convective cell卷筒涡胞 roll cell涡 eddy涡粘性 eddy viscosity环流 circulation环量 circulation速度环量 velocity circulation 偶极子 doublet, dipole驻点 stagnation point总压[力] total pressure总压头 total head静压头 static head总焓 total enthalpy能量输运 energy transport速度剖面 velocity profile库埃特流 Couette flow单相流 single phase flow单组份流 single-component flow均匀流 uniform flow非均匀流 nonuniform flow二维流 two-dimensional flow三维流 three-dimensional flow准定常流 quasi-steady flow非定常流 unsteady flow, non-steady flow 暂态流 transient flow周期流 periodic flow振荡流 oscillatory flow分层流 stratified flow无旋流 irrotational flow有旋流 rotational flow轴对称流 axisymmetric flow不可压缩性 incompressibility不可压缩流[动] incompressible flow浮体 floating body定倾中心 metacenter阻力 drag, resistance减阻 drag reduction表面力 surface force表面张力 surface tension毛细[管]作用 capillarity来流 incoming flow自由流 free stream自由流线 free stream line外流 external flow进口 entrance, inlet出口 exit, outlet扰动 disturbance, perturbation分布 distribution传播 propagation色散 dispersion弥散 dispersion附加质量 added mass ,associated mass收缩 contraction镜象法 image method无量纲参数 dimensionless parameter 几何相似 geometric similarity运动相似 kinematic similarity动力相似[性] dynamic similarity平面流 plane flow势 potential势流 potential flow速度势 velocity potential复势 complex potential复速度 complex velocity流函数 stream function源 source汇 sink速度[水]头 velocity head拐角流 corner flow空泡流 cavity flow超空泡 supercavity超空泡流 supercavity flow空气动力学 aerodynamics低速空气动力学 low-speed aerodynamics 高速空气动力学 high-speed aerodynamics 气动热力学 aerothermodynamics亚声速流[动] subsonic flow跨声速流[动] transonic flow超声速流[动] supersonic flow锥形流 conical flow楔流 wedge flow叶栅流 cascade flow非平衡流[动] non-equilibrium flow细长体 slender body细长度 slenderness钝头体 bluff body钝体 blunt body翼型 airfoil翼弦 chord薄翼理论 thin-airfoil theory构型 configuration后缘 trailing edge迎角 angle of attack失速 stall脱体激波 detached shock wave波阻 wave drag诱导阻力 induced drag诱导速度 induced velocity临界雷诺数 critical Reynolds number 前缘涡 leading edge vortex附着涡 bound vortex约束涡 confined vortex气动中心 aerodynamic center气动力 aerodynamic force气动噪声 aerodynamic noise气动加热 aerodynamic heating离解 dissociation地面效应 ground effect气体动力学 gas dynamics稀疏波 rarefaction wave热状态方程 thermal equation of state喷管 Nozzle普朗特-迈耶流 Prandtl-Meyer flow瑞利流 Rayleigh flow可压缩流[动] compressible flow可压缩流体 compressible fluid绝热流 adiabatic flow非绝热流 diabatic flow未扰动流 undisturbed flow等熵流 isentropic flow匀熵流 homoentropic flow兰金-于戈尼奥条件 Rankine-Hugoniot condition 状态方程 equation of state量热状态方程 caloric equation of state完全气体 perfect gas拉瓦尔喷管 Laval nozzle马赫角 Mach angle马赫锥 Mach cone马赫线 Mach line马赫数 Mach number马赫波 Mach wave当地马赫数 local Mach number 冲击波 shock wave激波 shock wave正激波 normal shock wave斜激波 oblique shock wave头波 bow wave附体激波 attached shock wave 激波阵面 shock front激波层 shock layer压缩波 compression wave反射 reflection折射 refraction散射 scattering衍射 diffraction绕射 diffraction出口压力 exit pressure超压[强] over pressure反压 back pressure爆炸 explosion爆轰 detonation缓燃 deflagration水动力学 hydrodynamics液体动力学 hydrodynamics泰勒不稳定性 Taylor instability 盖斯特纳波 Gerstner wave斯托克斯波 Stokes wave瑞利数 Rayleigh number自由面 free surface波速 wave speed, wave velocity 波高 wave height波列 wave train波群 wave group波能 wave energy表面波 surface wave表面张力波 capillary wave规则波 regular wave不规则波 irregular wave浅水波 shallow water wave深水波 deep water wave重力波 gravity wave椭圆余弦波 cnoidal wave潮波 tidal wave涌波 surge wave破碎波 breaking wave船波 ship wave非线性波 nonlinear wave孤立子 soliton水动[力]噪声 hydrodynamic noise 水击 water hammer空化 cavitation空化数 cavitation number空蚀 cavitation damage超空化流 supercavitating flow 水翼 hydrofoil水力学 hydraulics洪水波 flood wave涟漪 ripple消能 energy dissipation海洋水动力学 marine hydrodynamics 谢齐公式 Chezy formula欧拉数 Euler number弗劳德数 Froude number水力半径 hydraulic radius水力坡度 hvdraulic slope高度水头 elevating head水头损失 head loss水位 water level水跃 hydraulic jump含水层 aquifer排水 drainage排放量 discharge壅水曲线 back water curve压[强水]头 pressure head过水断面 flow cross-section明槽流 open channel flow孔流 orifice flow无压流 free surface flow有压流 pressure flow缓流 subcritical flow急流 supercritical flow渐变流 gradually varied flow急变流 rapidly varied flow临界流 critical flow异重流 density current, gravity flow 堰流 weir flow掺气流 aerated flow含沙流 sediment-laden stream降水曲线 dropdown curve沉积物 sediment, deposit沉[降堆]积 sedimentation, deposition 沉降速度 settling velocity流动稳定性 flow stability不稳定性 instability奥尔-索末菲方程 Orr-Sommerfeld equation 涡量方程 vorticity equation泊肃叶流 Poiseuille flow奥辛流 Oseen flow剪切流 shear flow粘性流[动] viscous flow层流 laminar flow分离流 separated flow二次流 secondary flow近场流 near field flow远场流 far field flow滞止流 stagnation flow尾流 wake [flow]回流 back flow反流 reverse flow射流 jet自由射流 free jet管流 pipe flow, tube flow内流 internal flow拟序结构 coherent structure 猝发过程 bursting process表观粘度 apparent viscosity 运动粘性 kinematic viscosity 动力粘性 dynamic viscosity泊 poise厘泊 centipoise厘沱 centistoke剪切层 shear layer次层 sublayer流动分离 flow separation层流分离 laminar separation 湍流分离 turbulent separation 分离点 separation point附着点 attachment point再附 reattachment再层流化 relaminarization起动涡 starting vortex驻涡 standing vortex涡旋破碎 vortex breakdown涡旋脱落 vortex shedding压[力]降 pressure drop压差阻力 pressure drag压力能 pressure energy型阻 profile drag滑移速度 slip velocity无滑移条件 non-slip condition壁剪应力 skin friction, frictional drag 壁剪切速度 friction velocity磨擦损失 friction loss磨擦因子 friction factor耗散 dissipation滞后 lag相似性解 similar solution局域相似 local similarity气体润滑 gas lubrication液体动力润滑 hydrodynamic lubrication浆体 slurry泰勒数 Taylor number纳维-斯托克斯方程 Navier-Stokes equation牛顿流体 Newtonian fluid边界层理论 boundary later theory边界层方程 boundary layer equation边界层 boundary layer附面层 boundary layer层流边界层 laminar boundary layer湍流边界层 turbulent boundary layer温度边界层 thermal boundary layer边界层转捩 boundary layer transition边界层分离 boundary layer separation边界层厚度 boundary layer thickness位移厚度 displacement thickness本文来自: 恒星英语学习网() 详细出处参考:/word/sxwl/2009-01-26/66896.html动量厚度 momentum thickness能量厚度 energy thickness焓厚度 enthalpy thickness注入 injection吸出 suction泰勒涡 Taylor vortex速度亏损律 velocity defect law形状因子 shape factor测速法 anemometry粘度测定法 visco[si] metry流动显示 flow visualization油烟显示 oil smoke visualization孔板流量计 orifice meter频率响应 frequency response油膜显示 oil film visualization阴影法 shadow method纹影法 schlieren method烟丝法 smoke wire method丝线法 tuft method氢泡法 nydrogen bubble method相似理论 similarity theory相似律 similarity law部分相似 partial similarity定理 pi theorem, Buckingham theorem 静[态]校准 static calibration动态校准 dynamic calibration风洞 wind tunnel激波管 shock tube激波管风洞 shock tube wind tunnel水洞 water tunnel拖曳水池 towing tank旋臂水池 rotating arm basin扩散段 diffuser测压孔 pressure tap皮托管 pitot tube普雷斯顿管 preston tube斯坦顿管 Stanton tube文丘里管 Venturi tubeU形管 U-tube压强计 manometer微压计 micromanometer多管压强计 multiple manometer静压管 static [pressure]tube流速计 anemometer风速管 Pitot- static tube激光多普勒测速计 laser Doppler anemometer, laser Doppler velocimeter 热线流速计 hot-wire anemometer热膜流速计 hot- film anemometer流量计 flow meter粘度计 visco[si] meter涡量计 vorticity meter传感器 transducer, sensor压强传感器 pressure transducer热敏电阻 thermistor示踪物 tracer时间线 time line脉线 streak line尺度效应 scale effect壁效应 wall effect堵塞 blockage堵寒效应 blockage effect动态响应 dynamic response响应频率 response frequency底压 base pressure菲克定律 Fick law巴塞特力 Basset force埃克特数 Eckert number格拉斯霍夫数 Grashof number努塞特数 Nusselt number普朗特数 prandtl number雷诺比拟 Reynolds analogy施密特数 schmidt number斯坦顿数 Stanton number对流 convection自由对流 natural convection, free convec-tion 强迫对流 forced convection热对流 heat convection质量传递 mass transfer传质系数 mass transfer coefficient热量传递 heat transfer传热系数 heat transfer coefficient对流传热 convective heat transfer辐射传热 radiative heat transfer动量交换 momentum transfer能量传递 energy transfer传导 conduction热传导 conductive heat transfer热交换 heat exchange临界热通量 critical heat flux浓度 concentration扩散 diffusion扩散性 diffusivity扩散率 diffusivity扩散速度 diffusion velocity分子扩散 molecular diffusion沸腾 boiling蒸发 evaporation气化 gasification凝结 condensation成核 nucleation计算流体力学 computational fluid mechanics 多重尺度问题 multiple scale problem伯格斯方程 Burgers equation对流扩散方程 convection diffusion equation KDU方程 KDV equation修正微分方程 modified differential equation 拉克斯等价定理 Lax equivalence theorem数值模拟 numerical simulation大涡模拟 large eddy simulation数值粘性 numerical viscosity。
室内灯具系列专业英语词汇
室内灯residential lamp / light枝状大吊灯chandeliers吊灯pendant lamp / light半吊灯half pendant lamp / light台灯table lamp / light壁灯wall lamp / light落地灯floor lamp / light吸顶灯ceiling lamp / light水晶灯crystal lamp / light木灯wooden lamp / light宫灯palace lamp / light仿水晶灯imitated crystal lamp / light 低压灯low voltage lamp / light工艺灯artificial lamp / light石艺灯marble lamp / light羊皮灯parchment lamp / light镜前灯mirror front lamp / light镜画灯picture lamp / light吊线灯track / line lamp / light格栅灯grille lamp / light水珠灯water pearl lamp / light导轨灯track lamp / light柱灯pillar lamp / light蒂凡尼灯tiffany lamp / light户外灯outdoor lamp / light路灯street lamp / light筒灯down lamp / light投光射灯spot lamp / light庭院灯garden lamp / light草坪灯lawn lamp / light草地灯lawn lamp / light防水灯water proof lamp / Under water lamp 柱头灯water jet lamp / light水底灯underwater lamp / light户外壁灯outdoor wall lamp / light组合灯assembled lamp / light太阳能灯solar lamp / light彩灯holiday lamp / light彩虹灯rainbow lamp / light烟花灯firework lamp / light烛灯(candle lamp)壁画灯(fresco lamp)护眼灯(eye-protection lamp)音乐灯(music lamp)半吊灯(half-pendant lamp)木灯(wooden lamp)宫灯(palace lamp)窗帘灯(curtain lamp)投光灯(projection lamp)筒灯(down lamp)射灯(reflector lamp)户外灯具系列专业词汇景观灯(landscape lamp)户外灯(outdoor lamp)草坪灯(lawn lamp)工程灯(engineering lamp)高杆灯(high-pole lamp)指示灯(indicator light)埋地灯(underground lamp)工厂灯(factory lamp)庭院灯(yard lamp)广场灯(square lamp)防潮灯(moisture-proof lamp)椰树灯(coconut lamp)不锈钢灯(stainless steel lamp)探明灯(search lamp)隧道灯(tunnel lamp)烟花灯(firework lamp)壁灯(wall lamp)桥梁灯(bridge lamp)柱头灯(pillar lamp)水底灯(underwater lamp)网灯(net lamp)线灯(line lamp)造型灯(sculpt lamp)门牌灯(doorplate lamp)彩虹灯(rainbow lamp)泛光灯(floodlight)墙角灯(corner lamp)a.c. powered lamp 交流供电的灯accent lighting 重点照明accommodate 调节accuracy 准确度,精确度acting-area(spot) lighting 舞台前台(聚光)照明activated electrode 激活电极activated phosphor 激活荧光粉actual life 有效寿命adapting luminance (视觉)亮适应性additional exposure 辅助曝光additional lighting 辅助照明adiabatic 绝热的adjustable spot lamp 可调聚光灯;车灯adjustment for illumination 照明调节;照度调整advanced ignition 预热启动advertising lighting 广告照明afterglow 余晖age 寿命;老化;灯老炼aged lamp 已老炼的灯aging condition 老炼条件aging rack 老炼台aging rate 老化速率aging 老炼;老化agreeable luminous enviroments 适宜的照明环境aiming of head lamps (汽车)前灯对焦air discharge 空气放电airborne lighting 飞机照明air-cooled lamp 风冷式的灯airfield lighting 机场照明albedo 反射率alight 发光的灯alignment of headlights (汽车)前灯的对焦alignment 调整,对整amalgam fluorescent lamp 汞齐荧光灯amalgam 汞齐ambipolar diffusion [物]双极扩散analog circut 等效电路,模拟电路angle lighting fitting 定向照明灯具angle of approach light (机场)着陆指示灯anode-to-cathode distance 极间距离anti-aircraft fitting 防空灯具apparent brightness 表观亮度apparent current 视在电流apparent power 视在功率apparent resistance 视在电阻appraisal of glare 眩光评价apprasial of lighting 照明效果评价approach lighting fitting 着陆照明灯具approach lighting 着陆照明aarc discharge 电弧放电, 弧光放电arc distribution 电弧分布arc drop 电弧位降arc excitation 电弧激发arc failure 息弧arc formaion 电弧形成arc gap 弧隙arc hissing 电弧噪音arc ignition 电弧的触发arc instability 电弧的不稳定性arc lamp carbon 碳弧灯arc lamp 弧光灯arc length 电弧长度arc luminance 电弧发光率arc migration 电弧移动arc noise 电弧噪音arc spectrum 电弧光谱arc 电弧arc-back 逆弧architectural lighting 建筑照明area floodlighting 大面积泛光照明area of illumination 受照面arrangement of fitting 灯具配置artificial daylight 人造昼光artistic lighting 艺术照明assessment of glare 眩光评价asymmertric lighting fitting 非对称灯具asymmertrical intensity distribution 非对称光强分布automobile lighting 汽车照明auxiliary discharge 辅助放电avalanche n.雪崩v.雪崩buffer gas 缓冲气体candle n.蜡烛vt.对着光检查cap 灯座carbon arc lamp 炭弧灯charge neutrality 电中性区charge neutrality电中性区coiled coil 卷曲螺旋colorimetry 色度学Columnar cell 柱状细胞compact fluorescent lamp 紧凑型荧光灯cone cell 视锥细胞, 圆锥细胞critical angle n.[物][空]临界角diffuse reflection 漫反射diffuse transmission 扩散透射漫透射扩散传输diffuse v.散播, 传播, 漫射, 扩散, (使)慢慢混合adj.散开的, 弥漫的diffusion n.扩散, 传播, 漫射double helix 二重螺旋线, 双螺旋线electrode n.电极electroluminescence n. [物]场致发光, 电致发光electroluminescent lamp 场致发光灯electromagnetic radiation 电磁辐射electromagnetic wave n.[电磁]电磁波envelope 玻壳filament n.细丝, 灯丝filter n.滤波器, 过滤器, 滤光器, 筛选fluorescent lamp n.荧光灯(管),日光灯(管)full radiator 完全辐射体fuse n.保险丝, 熔丝v.熔合gas incandescent lamp 充气白炽灯gas-filled lamp 充气灯glass pinch 玻璃封接glow discharge 辉光放电high pressure mercury lamp 高压汞灯high pressure xenon lamp 高压氙灯homogeneous light 单色光illuminance n.(=illumination)照明[度], 启发Incandescent lamp 白炽灯, 白热灯incidence n.]入射incident angle 入射角inert gas 惰性气体infrared ray adj.红外线的n.红外线intensity 光强irradiation 辐照度lamp cap 灯(泡)头管帽lead wire 导线light intensity 光强度low pressure discharge 低气压放电low pressure sodium vapour lamp 低气压钠灯lumen) luminous intensity 发光强度, 照度luminance [计] 亮度luminous flux n.[物]光通量(其单位为流明lumen) luminous intensity 发光强度, 照度medium n.媒体, 方法, 媒介adj.中间的, 中等的, 半生熟的mesopic vision 过渡视觉黄昏黎明视觉metastable states 亚稳态monochromitry/monochromatic 单色neon arc lamp 氖(弧)灯, 氖光灯, 霓虹灯neon lamp n.霓虹灯phosphor 荧光粉photogenerator 半导体发光器photometers n.光度计, 曝光计photometry n.光度测定, 测光法photopic vision 亮视觉, 白昼视觉photosynthesis n.光合作用positive column 正柱区primary color 原色prismatic adj.棱镜的propagation n.动植物, 繁殖, (声波, 电磁辐射等)传播radial 射线radiance 辐亮度radiation flux 辐射通量radiation power 辐射功率radio wave n.无线电波radiometry n.辐射线测定reflect v.反射reflection angle n.反射角refraction 折射retina n. [解]视网膜scattering n.散射scotopic vision 暗[夜, 微光]视觉solid angle n.[几]立体角, 多面角spectral luminous efficiency 光谱效率曲线spectrum 波谱spirality n.螺旋形sputtering 溅射阴极真空喷镀, 阴极溅镀thermal radiation 热辐射total internal reflection [光]全内反射total reflection 全反射transmission n.播送, 发射, 传动, 传送, 传输, 转播trichromatic adj.三色的, 三色版的, 三原色的tungsten halogen lamp 卤钨灯ultraviolet radiation n.紫外线vacuum lamp 真空灯visible light 可见光。
人造小太阳可控核聚变作文
人造小太阳可控核聚变作文英文回答:Artificial Controlled Nuclear Fusion.Nuclear fusion, the process of combining light atomic nuclei to form heavier ones, has long been a subject of scientific exploration and research. It holds the promise of providing clean and virtually limitless energy for our planet. In recent years, scientists and engineers have made significant progress in developing controlled nuclear fusion, and one of the most exciting advancements is the creation of an artificial small sun.The concept of an artificial small sun is based on the idea of creating a miniature version of the sun here on Earth. By replicating the conditions found in the core of the sun, scientists aim to harness the immense power of nuclear fusion. The goal is to achieve a self-sustaining fusion reaction that can generate large amounts of energy.To achieve controlled nuclear fusion, scientists use a device called a tokamak. This device consists of a toroidal vacuum chamber surrounded by powerful magnets. Inside the chamber, a mixture of hydrogen isotopes, such as deuterium and tritium, is heated to extremely high temperatures, creating a plasma state. The strong magnetic field confines the plasma, preventing it from touching the walls of the chamber and causing damage.The plasma is then subjected to powerful heating methods, such as radiofrequency waves or neutral beam injection, to increase its temperature and pressure. As the plasma reaches the necessary conditions, the hydrogen isotopes collide and fuse together, releasing a tremendous amount of energy in the process. This energy can be captured and converted into electricity, providing a clean and sustainable source of power.The development of an artificial small sun has numerous advantages. Firstly, it offers a solution to the global energy crisis by providing a virtually unlimited source ofclean energy. Unlike fossil fuels, which contribute to climate change and pollution, nuclear fusion does not produce greenhouse gases or radioactive waste. Secondly,the technology behind controlled nuclear fusion can be used for various applications, such as powering spacecraft or generating electricity for remote areas. Lastly, theartificial small sun has the potential to revolutionize the way we think about energy, paving the way for a sustainable and environmentally friendly future.中文回答:人造小太阳可控核聚变。
年产1万吨甘氨酸生产工艺设计说明书

(4)影响醇析效果的主要因素有甲醇的加入量和醇析温度,因此为保证产品的收率,这两个条件必须控制好。
6、设计计算结果数据
本设计氨化合成釜各数据如下表1:
表1
序号
项目
规格
1
合成釜体积
3000L
4. The design process
Glycine production process a lot of, at present industrialization and has the prospects for industrialization production technology mainly in the chloroacetic acid ammonolysis process, Trey g (cstercker method), hydrogen cyanide, and biosynthesis method etc. This design adopts the method of ammonia chloride solution. The method according to the different raw materials, and can be divided into two processes: (1) alcohol or aqueous phase with methenamine, chloroacetic acid and ammonia (ammonia or liquid ammonia) synthesis as raw material; (2) in the aqueous solution with ammonium carbonate or carbamate amine, chloroacetic acid, ammonia as raw material synthesis. At present, the main production methods in China, the yield of about 70%, the latter yield is low (about 42%), it is rarely used in industrial production. At present, the main production methods in China, the yield of about 70%, the latter yield is low (about 42%), it is rarely used in industrial production. Because of urotropine in aqueous phase synthesis of glycine consumption is larger, and methenamine higher price, can’t be recycled, so cost is higher, and with alcohol solution instead of water solution will greatly reduce the consumption of urotropine, thereby reducing the cost of production. Therefore, the current domestic popular with alcohol phase synthesis of glycine.
2025届高考英语写作素材积累之青少年科技创新+词汇句型清单

2025届高考英语写作素材积累之青少年科技创新词汇句型清单一、词汇1. Innovation / Technological Innovation:科技创新2. Teenager / Youth:青少年3. Science and Technology:科学技术4. Creativity:创造力5. Invention:发明6. Discovery:发现7. Research and Development (R&D):研发8. Advanced Technology:先进技术9. Digital Technology:数字技术10. Artificial Intelligence (AI):人工智能11. Robotics:机器人技术12. Biotechnology:生物技术13. Nanotechnology:纳米技术14. Renewable Energy:可再生能源15. Smart Device:智能设备16. Coding:编程17. Experiment:实验18. Innovation Ability:创新能力19. Problem-solving Skills:解决问题的能力20. Critical Thinking:批判性思维21. Curiosity:好奇心22. Perseverance:毅力23. Teamwork:团队合作24. Leadership:领导力25. Future-oriented:面向未来的二、句型1. Teenagers play a crucial role in driving technological innovation.青少年在推动科技创新方面发挥着至关重要的作用。
2. Encouraging teenagers' interest in science and technology is essential for fostering innovation.鼓励青少年对科学技术的兴趣对于培养创新至关重要。
物理专业英语词汇(V)

物理专业英语词汇(V)v n transition v n 跃迁v particle v 粒子vacancy 空位vacancy mobility 空位迁移率vacant level 空能级vacant shell 空壳vacuum 真空vacuum apparatus 真空装置vacuum capacitor 真空电容器vacuum chamber 真空室vacuum desiccation 真空干燥vacuum discharge 真空放电vacuum evaporation 真空蒸发vacuum expectation value 真空期待值vacuum fluctuation 真空起伏vacuum gauge 真空计vacuum heat treatment 真空热处理vacuum polarization 真空极化vacuum pump 真空泵vacuum seal 真空密封vacuum spectrograph 真空摄谱仪vacuum spectrometer 真空光谱仪vacuum spectroscope 真空分光镜vacuum system 真空装置vacuum thermocouple 真空热电偶vacuum tube 真空管vacuum tube electrometer 真空管静电计vacuum tube oscillator 真空管振荡器vacuum ultraviolet 真空紫外线vacuum ultraviolet spectroscopy 真空紫外光谱学vacuum ultraviolet spectrum 真空紫外谱vacuum valve 真空阀vagabond current 涡流vagabond ray 杂散光valence 价valence angle 价角valence band 价带valence bond 价键valence bond band 价带valence bond method 价键法valence crystal 价键晶体valence electron 价电子valence number 价数valence orbit 价轨道valency 价validity 精确度value 值van allen belt 范艾伦辐射带van allen radiation belt 范艾伦辐射带van de graaf generator 范德格拉夫发电机van der pol equation 范德波尔方程van der waals energy 范德瓦耳斯能量van der waals equation 范德瓦耳斯方程van der waals force 范德瓦耳斯力van der waals molecule 范德瓦耳斯分子van der waals' crystal 范德瓦耳斯晶体van hove singularity 范霍夫奇点van vleck paramagnetism 范弗莱克顺磁性vanadium 钒vapor 汽vapor phase epitaxial growth 气相外延生长vapor phase growth 气相生长vapor pressure 蒸气压vapor pressure lowering 蒸气压降低vapor tension 蒸气压vapor vacuum pump 蒸气真空泵vaporization heat 汽化热vapour 汽vapour density 汽密度vapour pressure 蒸气压vapour tension 蒸气压varactor 变容二极管variable 变数variable capacitance diode 变容二极管variable focus lens 变焦透镜variable leak valve 可变漏阀variable mu tube 可变管variable quantity 变量variable resistance 可变电阻variable resistor 可变电阻器variable star 变星variation method 变分法variation principle 变分原理variational principle 变分原理varifocal lens 变焦透镜variometer 可变电感器varistor 压敏电阻器vector coupling 矢量耦合vector current 矢量流vector field 矢量场vector meson 矢量介子vector meson dominance model 矢量介子优势模型vector model 矢量模型vector polarization 矢量极化vector potential 矢量势vector space 矢量空间vega 织女星vela 船帆座vela pulsar 船帆脉冲星vela supernova remnants 船帆超新星遗迹velocity 速度velocity distance relation 速距关系velocity distribution 速度谱velocity field 速度场velocity modulation 蒂velocity modulation tube 速弟velocity of light 光速velocity of propagation 传播速度velocity potential 速度势velocity profile 速度场velocity selector 速度选择器velocity space 速度空间velocity space instability 速度空间不稳定性velocity spectrum 速度谱vena contracta 缩脉venetian blind 四分之一波片veneziano model 对偶模型venturi tube 文杜里管venus 金星verdet constant 费尔德常数vernal equinox 春分vernal point 春分点verneuil method 韦纳伊法vertex detector 顶角探测器vertical component 垂直分量vertical line 垂线vertical pendulum 竖摆vertical take off and landing aircraft 垂直起落机very high pressure 甚高压very large array 甚大阵very large scale integrated circuit 超大规模集成电路very low frequency emission 甚低频发射very low frequency radiation 甚低频辐射very low temperature 甚低温vibrate 振动vibrating reed 振簧vibrating reed electrometer 振簧式静电计vibrating reed frequency meter 振簧式频率计vibration 振动vibration galvanometer 振动式检疗vibration of membrane 膜的振动vibration of plate 板的振动vibration of string 弦的振动vibration rotation band 转动振动光谱带vibration rotation interaction 振动转动相互酌vibration rotation spectrum 振动转动谱vibration testing machine 振动测试机vibrational band 振动带vibrational constant 振动常数vibrational energy 振动能量vibrational excitation 振动激发vibrational level 振动能级vibrational perturbation 振动微扰vibrational quantum number 振动量子数vibrational relaxation 振动弛豫vibrational spectrum 振动谱vibrational state 振动态vibrational structure 振动结构vibrational sum rule 振动求和规则vibrational temperature 振动温度vibrometer 测振计vibronic interaction 振动电子相互酌vickers hardness 维氏硬度video amplifier 视频放大器video frequency 视频video signal 视频信号videotape recorder 磁带录象机vidicon 光导摄象管viewfinder 取景器vignetting 渐晕villari effect 维拉里效应violet 紫的virasoro algebra 维拉宿代数virgo 室女座virial 维里virial coefficient 维里系数virial expansion 维里展开virial theorem 维里定理virtual cathode 虚阴极virtual displacement 虚位移virtual energy level 虚能级virtual focus 虚焦点virtual image 虚象virtual mass 虚质量virtual molecular orbital 虚分子轨函数virtual particle 虚粒子virtual process 虚过程virtual source 虚象源virtual state 虚态virtual temperature 虚温度virtual transition 虚跃迁virtual work 虚功viscoelastic fluid 粘弹性铃viscoelastic gas 粘弹性气体viscoelastic solid 粘弹性固体viscoelasticity 粘弹性viscometer 粘度计viscosimeter 粘度计viscosity 粘滞性viscosity gage 粘滞真空计viscous fluid 粘滞铃viscous friction 粘滞摩擦viscous solid 粘性固体visibility 可见性visibility curve 糜度曲线visibility factor 可见性因子visibility of interference fringes 干涉条纹可见度visible horizon 可见地平visible image 可见象visible light 可见辐射光visible radiation 可见辐射光visible rays 可见光线visible spectrum 可见光谱visible ultraviolet spectrophotometer 可见紫外分光光度计vision 视觉visor 取景器visual acuity 视敏度visual angle 视角visual binary 目视双星visual double 目视双星visual field 视野visual magnitude 目视星等visualization 显象visualization of flow 怜显象vitreous solid 玻璃状固体vitreous state 玻璃态vlasov equation 伏拉蓑方程vlbi 超长基线干涉量度法vlf emission 甚低频发射vlf radiation 甚低频辐射void 空位void coefficient 空穴系数void lattice 空穴点阵voigt body 沃伊特物体voigt model 沃伊特模型volans 飞鱼座volatilisation 挥发volatility 挥发性volatilization 挥发volt 伏volta effect 伏打效应voltage 电压voltage amplifier 电压放大器voltage drop 电压下降voltage regulation diode 倒二极管voltage regulator tube 倒管voltage standard circuit 电压标准电路voltaic cell 伏打电池voltameter 电量计voltampere 伏安voltmeter 电压表volume 体积volume control 音量控制volume effects of isotope shift 同位素位移体积效应volume energy 体积能volume expansivity 体积膨胀系数volume force 体积力volume hologram 深全息图volume indicator 强度指示器响度指示器volume ionization 体积电离volumeter 容积计von klitzing constant 克里青常数von kormon number 卡尔曼数von kormon's transonic similarity rule 卡尔曼的跨声速相似定律von neumann algebra 诺伊曼代数voronoi polyhedron 沃罗诺伊多面体vortex 涡流vortex currents 涡流涡电流vortex field 旋涡场vortex flow 涡流vortex line 涡线vortex line state 涡线态vortex motion 涡旋运动vortex ring 涡环vortex sheet 涡层vortex street 涡街vortex tube 涡管vorticity 涡量度vorticity transfer theory 涡度转移理论vowel 元音vtol aircraft 垂直起落机vulcanizate 硫化橡胶vulcanized rubber 硫化橡胶vulpecula 狐狸座。
自动化专业英语常用词汇
自动化专业英语常用词汇acceleration transducer 加速度传感器accumulatederror 累积误差AC-DC-AC frequency converter 交 -直 -交变频器AC (alternating current)electric drive 交流电子传动active attitudestabilization 主动姿态稳定adjointoperator 伴随算子admissibleerror 容许误差amplifyingelement 放大环节analog-digital conversion 模数转换operationalamplifiers 运算放大器aperiodic decomposition 非周期分解approximate reasoning 近似推理a prioriestimate 先验估计articulatedrobot 关节型机器人asymptoticstability 渐进稳定性attained posedrift 实际位姿漂移attitudeacquisition 姿态捕获AOCS ( attitude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度attitude disturbance 姿态扰动automatic manual station 自动 -手动操作器automaton 自动机base coordinate system 基座坐标系bellows pressure gauge 波纹管压力表gauge 测量仪器black box testingapproach 黑箱测试法bottom-up development 自下而上开发boundary value analysis 边界值分析brainstorming method 头脑风暴法CAE (computer aided engineering) 计算机辅助工程CAM (computer aided manufacturing) 计算机辅助制造capacitive displacement transducer 电容式位移传感器capacity 电容displacement 位移capsule pressure gauge 膜盒压力表rectangular coordinatesystem 直角坐标系cascade compensation 串联补偿using series or parallel capacitors 用串联或者并联的电容chaos 混沌calrity 清晰性classical informationpattern 经典信息模式classifier 分类器clinical control system 临床控制系统closed loop pole 闭环极点open loop 开环closed loop transfer function 闭环传递函数combined pressure and vacuum gauge 压力真空表command pose 指令位姿companion matrix 相伴矩阵compatibility 相容性,兼容性compensating network 补偿网络Energy is conserved in all of its forms 能量是守恒的compensation 补偿,矫正conditionally instability 条件不稳定性configuration 组态connectivity 连接性conservative system 守恒系统consistency 一致性constraint condition 约束条件control accuracy 控制精度Gyroscope 陀螺仪control panel 控制屏,控制盘control system synthesis 控制系统综合corner frequency 转折频率coupling of orbit and attitude 轨道和姿态耦合critical damping 临界阻尼Damper 阻尼器临界 criticalcritical stability 临界稳定性cross-overfrequency 穿越频率,交越频率cut-off frequency 截止频率cybernetics 控制论cyclic remotecontrol 循环遥控cycle 循环 cyclic cylindrical robot 圆柱坐标型机器人damped oscillation 阻尼振荡oscillation 振荡;振动;摆动damper 阻尼器damping ratio 阻尼比ratio 比data acquisition 数据采集data preprocessing 数据预处理data processor 数据处理器D controller 微分控制器微分控制: Differentialcontrol积分控制: integralcontrol 比例控制: proportional controldescribing function 描述函数desired value 希望值真值: truthvalues 参考值: reference valuedestination 目的站detector 检出器deviation 偏差deviation alarm 偏差报警器differential dynamicalsystem 微differential pressure level meter差压液位计 meter=gauge仪表differen tial差别的 微分的differential pressure transmitter 差压变送器differential transformer displacement transducerdifferentiation element 微分环节差动变压器式位移传感器digital filer 数字滤波器 fil ter滤波器digital signal processing数字信号处理dimension transducer 尺度传感器discrete system simulation language 离散系统仿真语言discrete 离散的 不连续的displacement vibration amplitude transducer 位移振幅传感器 幅度: amplitude distrubance 扰动disturbance compensation 扰动补偿diversit y 多样性 divisibi lity 可分性domain knowledge 领域知识dominant pole 主导极点 零点 zero 调制: modulation ; modulate 解调: demodulation countermodulatio n duty ratio 负载 比 dynamic characteristics 动态特性 dynamic deviation 动态偏差dynamic error coefficient 动态误差系数 dynamic input-output model 动态投入产出模型Index 指数eddy current thickness meter 电涡流厚度计 meter 翻译成计 gauge 翻译成表 electric conductance level meter 电导液位计 electromagnetic flow transducer 电磁流量传感器electronic batching scale 电子配料秤 scale 秤electronic belt conveyor scale 电子皮带秤 electronic hopper scale 电子料斗秤elevation 仰角depression 俯角equilibrium point 平衡点error 误差estimate 估计量estimation theory 估计理论expected characteristics 希望特性failure diagnosis 故障诊断feasibility study 可行性研究feasible 可行的feasible region 可行域feature detection 特征检测feature extraction 特征抽取feedback compensation 反馈补偿Feed forward path 前馈通路前馈: feed forward 反馈 feedbackFMS ( flexible manufacturing system) 柔性制造系统柔性: flexible 刚性: rigiditybending deflection 弯曲挠度deflect 偏向偏离flow sensor/transducer流量传感器flow transmitter 流量变送器forward path 正向通路frequency converter 变频器frequency domain model reduction me thod 频域模型降阶法频域frequency response 频域响应functional decomposition 功能分解FES (functional electrical stimulation ) 功能电刺激stimulate 刺激functional simularity 功能相似fuzzy logic 模糊逻辑generalized least squares estimation 广义最小二乘估计geometric similarity 几何相似global optimum 全局最优goal coordinationmethod 目标协调法graphic search 图搜索guidance system 制导系统gyro drift rate 陀螺漂移率gyrostat 陀螺体Hall displacement transducer 霍尔式位移传感器horizontaldecomposition 横向分解hydraulic step motor 液压步进马达Icontroller 积分控制器integral 积分identifiability 可辨识性imagerecognition 图像识别impulse 冲量impulsefunction 冲击函数,脉冲函数index of merit 品质因数index 指数inductive force transducer 电感式位移传感器感应的inductive电感:inductanceindustrial automation 工业自动化inertial attitude sensor 惯性姿态敏感器inertial coordinate system 惯性坐标系information acquisition 信息采集infrared gas analyzer 红外线气体分析器infrared 红外线红外线的ultraviolet ray 紫外线的visible light可见光inherent nonlinearity 固有非线性inherent regulation 固有调节initial deviation 初始偏差input-output model 投入产出模型instability 不稳定性integrity 整体性intelligent terminal 智能终端internal disturbance 内扰invariant embedding principle 不变嵌入原理inverse Nyquist diagram 逆奈奎斯特图investment decision 投资决策joint 关节knowledge acquisition 知识获取knowledge assimilation 知识同化knowledge representation 知识表达lag-lead compensation滞后超前补偿Laplacetransform 拉普拉斯变换large scale system 大系统least squares criterion 最小二乘准则criterion 准则linearizationtechnique 线性化方法linear motion electricdrive 直线运动电气传动linear motionvalve 直行程阀linearprogramming 线性规划load cell 称重传感器local optimum 局部最优local 局部log magnitude-phase diagram对数幅相图magnitude大小的程度amplitude 振幅long term memory 长期记忆Lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理magnetoelastic weighing cell 磁致弹性称重传感器magnitude-frequency characteristic 幅频特性magnitude margin幅值裕度margin边缘magnitude scalefactor幅值比例尺manipulator机械手man-machine coordination人机协调MAP (manufacturing automation protocol) 制造自动化协议protocol 协议marginal effectiveness 边际效益Mason‘‘ s gain formula 梅森增益公式matchingcriterion匹配准则maximum likelihood estimation 最大似然估计maximum overshoot 最大超调量maximum principle 极大值原理mean-square error criterion 均方误差准则minimal realization 最小实现minimum phase system 最小相位系统minimum variance estimation 最小方差估计model reference adaptive control system 模型参考适应控制系统 model verification 模型验证modularization 模块化mean 平均MTBF (mean time between failures) 平均故障间隔时间 MTTF (mean time to failures) 平均无故障时间multiloop control 多回路控制multi-objective decision 多目标决策Nash optimality 纳什最优性nearest-neighbor 最近邻necessity measure 必然性侧度negative feedback 负反馈neural assembly 神经集合neural network computer 神经网络计算机Nichols chart 尼科尔斯图Nyquist stability criterion 奈奎斯特稳定判据objective function 目标函数on-line assistance 在线帮助on-off control 通断控制optic fiber tachometer 光纤式转速表optimal trajectory 最优轨迹optimization technique 最优化技术order parameter 序参数orientation control 定向控制oscillating period 振荡周期周期:period cycleoutput prediction method 输出预估法oval wheel flowmeter 椭圆齿轮流量计Over damping 过阻尼underdamping 欠阻尼PR (pattern recognition) 模式识别P control 比例控制器peak time 峰值时间penalty function method 罚函数法perceptron 感知器phase lead 相位超前phase lag相位滞后Photoelectri c光电tachometric transducer光电式转速传感器piezoelectric force transducer压电式力传感器PLC (programmable logic controller) 可编程序逻辑控制器plug braking 反接制动pole assignment 极点配置pole-zero cancellation零极点相消polynomial input 多项式输入portfolio theory 投资搭配理论pose overshoot位姿过调量position measuring instrument 位置测量仪posentiometric displacement transducer 电位器式位移传感器positive feedback 正反馈power system automation 电力系统自动化pressure transmitter 压力变送器primary frequency zone 主频区priority 优先级process-oriented simulation 面向过程的仿真proportional control 比例控制proportional plus derivative controller 比例微分控制器pulse duration 脉冲持续时间pulse frequency modulation control system 脉冲调频控制系统: frequency modulation 频率调制调频pulse width modulation control system 脉冲调宽控制系统PWM inverter 脉宽调制逆变器QC (qualitycontrol) 质量管理quantized noise 量化噪声ramp function 斜坡函数randomdisturbance 随机扰动random process 随机过程rate integratinggyro 速率积分陀螺real time telemetry 实时遥测receptive field 感受野rectangular robot 直角坐标型机器人redundantinformation 冗余信息regional planningmodel 区域规划模型regulatingdevice 调节装载regulation 调节relationalalgebra 关系代数remoteregulating 遥调reproducibility 再现性resistance thermometer sensor 热电阻 电阻温度计传感器response curve 响应曲线return difference matrix 回差矩阵 return ratio matrix回比矩阵revolute robot 关节型机器人revolution speed transducer 转速传感器 rewriting rule重写规则rigid spacecraft dynamics 刚性航天动力学 dynamics 动力学robotics 机器人学robot programming language 机器人编程语言 robust control 鲁棒控制 robustness 鲁棒性 root locus 根轨迹 roots flowmeter腰轮流量计rotameter 浮子流量计,转子流量计sampled-data control system 采样控制系统sampling control system 采样控制系统saturation characteristics 饱和特性 scalar Lyapunov function 标量李雅普诺夫函数s-domain s 域self-operated controller 自力式控制器 self-organizing system 自组织系统self-reproducing system 自繁殖系统self-tuning control 自校正控制sensing element 敏感元件 sensitivity analysis 灵敏度 分析sensory control 感觉控制 sequential decomposition顺序分解sequential least squares estimation 序贯最小二乘估计 servo control 伺服控制,随动控制servomotor settling time伺服马达过渡时间 sextan t六分仪short term planning短期计划short time horizon coordinationsignal detection and estimation短时程协调信号检测和估计signal reconstruction 信号重构similarity 相似性simulated interrupt 仿真中断simulation block diagram 仿真框图simulation experiment 仿真实验simulation velocity 仿真速度simulator 仿真器single axle table 单轴转台single degree of freedom gyro 单自由度陀螺翻译顺序呵呵spin axis 自旋轴spinner 自旋体stability criterion 稳定性判据stabilitylimit 稳定极限stabilization 镇定,稳定state equation model 状态方程模型state space description 状态空间描述static characteristicscurve 静态特性曲线station accuracy 定点精度stationary randomprocess 平稳随机过程statistical analysis 统计分析statistic patternrecognition 统计模式识别steady state deviation稳态偏差顺序翻译即可steady state error coefficient稳态误差系数step-by-step control步进控制step function 阶跃函数strain gauge load cell 应变式称重传感器subjective probability 主观频率supervisory computer control system 计算机监控系统sustained oscillation 自持振荡swirlmeter 旋进流量计switching point 切换点systematology 系统学system homomorphism 系统同态system isomorphism 系统同构system engineering 系统工程tachometer 转速表target flow transmitter 靶式流量变送器task cycle 作业周期temperature transducer 温度传感器tensiometer 张力计texture 纹理theorem proving 定理证明therapy model 治疗模型thermocouple 热电偶thermometer 温度计thickness meter 厚度计three-axis attitude stabilization 三轴姿态稳定three state controller 三位控制器thrust vector control system 推力矢量控制系统推力器thrustertime constant 时间常数time-invariant system 定常系统,非时变系统invariant不变的时序控制器time schedulecontrollertime-sharing control 分时控制time-varying parameter 时变参数top-down testing 自上而下测试全面质量管理TQC (total qualitycontrol)tracking error 跟踪误差trade-off analysis 权衡分析transfer function matrix传递函数矩阵transformation grammar 转换文法transient deviation 瞬态偏差短暂的瞬间的transient process过渡过程transition diagram 转移图transmissible pressure gauge 电远传压力表transmitter 变送器trend analysis 趋势分析triple modulation telemetering system 三重调制遥测系统turbine flowmeter 涡轮流量计Turing machine 图灵机two-time scale system 双时标系统ultrasonic levelmeter 超声物位计unadjustable speed electric drive 非调速电气传动unbiased estimation 无偏估计underdamping 欠阻尼uniformly asymptotic stability 一致渐近稳定性uninterrupted duty 不间断工作制,长期工作制unit circle 单位圆unit testing 单元测试unsupervised learing 非监督学习upper level problem 上级问题urban planning 城市规划value engineering 价值工程variable gain 可变增益,可变放大系数variable structure control system 变结构控制function 函数vector Lyapunov function 向量李雅普诺夫函数velocity error coefficient 速度误差系数velocity transducer 速度传感器 vertical decomposition纵向分解vibrating wire force transducer 振弦式力传感器vibrometer 振动计vibrationVibrate 振动viscousdamping 粘性阻尼voltage source inverter 电压源型逆变器vortex precessionflowmeter 旋进流量计vortex sheddingflowmeter 涡街流量计WB (way base) 方法库weighing cell 称重传感器weightingfactor 权因子weightingmethod 加权法Whittaker-Shannon sampling theorem 惠特克 -香农采样定理Wiener filtering维纳滤波w- plane w 平面zero-based budget 零基预算zero-input response零输入响应zero-state response零状态响应z-transform z 变换《信号与系统》专业术语中英文对照表第1章绪论信号( signal)系统( system)电压( voltage)电流( current)信息( information)电路( circuit )网络( network)确定性信号( determinate signal)随机信号( random signal)一维信号( one–dimensional signal)多维信号( multi –dimensional signal)连续时间信号( continuous time signal)离散时间信号( discrete time signal)取样信号( sampling signal)数字信号( digital signal)周期信号( periodic signal)非周期信号( nonperiodic(aperiodic) signal)能量( energy)功率( power)能量信号( energy signal)功率信号( power signal)平均功率( average power)平均能量( average energy)指数信号( exponential signal)时间常数( time constant)正弦信号( sine signal)余弦信号( cosine signal)振幅( amplitude)角频率( angular frequency)初相位( initial phase)周期( period)频率( frequency)欧拉公式( Euler ’s formula)复指数信号( complex exponential signal)复频率( complex frequency)实部( real part)虚部( imaginary part)抽样函数Sa(t)(sampling(Sa) function)偶函数( even function)奇异函数( singularity function )奇异信号( singularity signal)单位斜变信号( unit ramp signal)斜率( slope)单位阶跃信号( unit step signal)符号函数( signum function)单位冲激信号( unit impulse signal)广义函数( generalized function)取样特性( sampling property)冲激偶信号( impulse doublet signal)奇函数( odd function)偶分量(even component)偶数even 奇数odd 奇分量(odd component)正交函数( orthogonal function)正交函数集( set of orthogonal function)数学模型( mathematics model)电压源( voltage source)基尔霍夫电压定律( Kirchhoff ’s voltage law(KVL ))电流源( current source)连续时间系统( continuous time system)离散时间系统( discrete time system)微分方程( differential function)差分方程( difference function)线性系统( linear system)非线性系统( nonlinear system)时变系统( time–varying system)时不变系统( time–invariant system)集总参数系统( lumped–parameter system)分布参数系统( distributed–parameter system)偏微分方程( partial differential function )因果系统( causal system)非因果系统( noncausal system)因果信号( causal signal)叠加性( superposition property)均匀性( homogeneity)积分( integral)输入–输出描述法( input–output analysis)状态变量描述法( state variable analysis)单输入单输出系统( single–input and single–output system)状态方程( state equation)输出方程( output equation)多输入多输出系统( multi –input and multi–output system)时域分析法( time domain method)变换域分析法( transform domain method)卷积( convolution)傅里叶变换( Fourier transform)拉普拉斯变换( Laplace transform)第 2 章连续时间系统的时域分析齐次解( homogeneous solution)特解( particular solution)特征方程( characteristic function)特征根( characteristic root)固有(自由)解( natural solution)强迫解( forced solution)起始条件( original condition)初始条件( initial condition)自由响应( natural response)强迫响应( forced response)零输入响应( zero-input response)零状态响应( zero-state response)冲激响应( impulse response)阶跃响应( step response)卷积积分( convolution integral)交换律( exchange law)分配律( distribute law)结合律( combine law)第3 章傅里叶变换频谱( frequency spectrum)频域( frequency domain)三角形式的傅里叶级数(trigonomitric Fourier series)指数形式的傅里叶级数(exponential Fourier series)傅里叶系数( Fourier coefficient)直流分量( direct component)基波分量( fundamental component)component分量n 次谐波分量( nth harmonic component)复振幅( complex amplitude)频谱图( spectrum plot(diagram))幅度谱( amplitude spectrum)相位谱( phase spectrum)包络( envelop)离散性( discrete property)谐波性( harmonic property)收敛性( convergence property)奇谐函数( odd harmonic function)吉伯斯现象( Gibbs phenomenon)周期矩形脉冲信号( periodic rectangular pulse signal)直角的周期锯齿脉冲信号( periodic sawtooth pulse signal)周期三角脉冲信号( periodic triangular pulse signal)三角的周期半波余弦信号( periodic half–cosine signal)周期全波余弦信号( periodic full –cosine signal)傅里叶逆变换(inverse Fourier transform)inverse 相反的频谱密度函数( spectrum density function)单边指数信号( single–sided exponential signal)双边指数信号( two–sided exponential signal)对称矩形脉冲信号( symmetry rectangular pulse signal)线性( linearity )对称性( symmetry)对偶性( duality)位移特性( shifting)时移特性( time–shifting)频移特性( frequency–shifting )调制定理( modulation theorem)调制( modulation)解调( demodulation)变频( frequency conversion)尺度变换特性( scaling)微分与积分特性( differentiation and integration)时域微分特性( differentiation in the time domain)时域积分特性( integration in the time domain)频域微分特性( differentiation in the frequency domain)频域积分特性( integration in the frequency domain)卷积定理( convolution theorem)时域卷积定理( convolution theorem in the time domain)频域卷积定理( convolution theorem in the frequency domain)取样信号( sampling signal)矩形脉冲取样( rectangular pulse sampling)自然取样( nature sampling)冲激取样( impulse sampling)理想取样( ideal sampling)取样定理( sampling theorem)调制信号( modulation signal)载波信号( carrier signal)已调制信号( modulated signal)模拟调制( analog modulation)数字调制( digital modulation)连续波调制( continuous wave modulation)脉冲调制( pulse modulation)幅度调制( amplitude modulation)频率调制( frequency modulation)相位调制( phase modulation)角度调制( angle modulation)频分多路复用( frequency–division multiplex (FDM ))时分多路复用( time–division multiplex (TDM ))相干(同步)解调( synchronous detection)本地载波( local carrier)载波系统函数( system function)网络函数( network function)频响特性( frequency response)幅频特性( amplitude frequency response)幅频响应相频特性( phase frequency response)无失真传输( distortionless transmission)理想低通滤波器(ideal low–pass filter)截止频率( cutoff frequency)正弦积分( sine integral)上升时间( rise time)窗函数( window function )理想带通滤波器( ideal band–pass filter)太直译了第 4 章拉普拉斯变换代数方程( algebraic equation)双边拉普拉斯变换( two-sided Laplace transform)双边拉普拉斯逆变换( inverse two-sided Laplace transform)单边拉普拉斯变换( single-sided Laplace transform)拉普拉斯逆变换( inverse Laplace transform)收敛域( region of convergence( ROC))延时特性( time delay)s 域平移特性( shifting in the s-domain)s域微分特性( differentiation in the s-domain)s 域积分特性( integration in the s-domain)初值定理( initial-value theorem)终值定理( expiration-value)复频域卷积定理( convolution theorem in the complex frequency domain)部分分式展开法( partial fraction expansion)留数法( residue method)第 5 章策动点函数( driving function )转移函数( transfer function)极点( pole)零点( zero)零极点图( zero-pole plot)暂态响应( transient response)稳态响应( stable response)稳定系统( stable system)一阶系统( first order system)高通滤波网络( high-pass filter)低通滤波网络( low-pass filter)二阶系统( second order system)最小相位系统( minimum-phase system)高通( high-pass)带通( band-pass)带阻( band-stop)有源( active)无源( passive)模拟( analog)数字( digital)通带( pass-band)阻带( stop-band)佩利-维纳准则( Paley-Winner criterion)最佳逼近( optimum approximation)过渡带( transition-band)通带公差带( tolerance band)巴特沃兹滤波器( Butterworth filter )切比雪夫滤波器( Chebyshew filter)方框图( block diagram)信号流图( signal flow graph)节点( node)支路( branch)输入节点( source node)输出节点( sink node)混合节点( mix node)通路( path)开通路( open path)闭通路( close path)环路( loop)自环路( self-loop)环路增益( loop gain)不接触环路( disconnect loop)前向通路( forward path)前向通路增益( forward path gain)梅森公式( Mason formula)劳斯准则( Routh criterion)第 6 章数字系统( digital system)数字信号处理( digital signal processing)差分方程( difference equation)单位样值响应( unit sample response)卷积和( convolution sum)Z 变换( Z transform)序列( sequence)样值( sample)单位样值信号( unit sample signal)单位阶跃序列( unit step sequence)矩形序列(rectangular sequence)单边实指数序列( single sided real exponential sequence)单边正弦序列( single sided exponential sequence)斜边序列( ramp sequence)复指数序列( complex exponential sequence)线性时不变离散系统( linear time-invariant discrete-time system)常系数线性差分方程( linear constant-coefficient difference equation)后向差分方程( backward difference equation)前向差分方程( forward difference equation)海诺塔( Tower of Hanoi)菲波纳西( Fibonacci)冲激函数串( impulse train)第7 章数字滤波器( digital filter )单边 Z 变换( single-sided Z transform)双边 Z 变换 (two-sided (bilateral) Z transform)幂级数( power series)收敛( convergence)有界序列( limitary-amplitude sequence)正项级数( positive series)有限长序列( limitary-duration sequence)右边序列( right-sided sequence)左边序列( left-sided sequence)双边序列( two-sided sequence)Z逆变换( inverse Z transform)围线积分法( contour integral method)幂级数展开法( power series expansion)z域微分( differentiation in the z-domain)序列指数加权( multiplication by an exponential sequence)z域卷积定理( z-domain convolution theorem)帕斯瓦尔定理( Parseval theorem)传输函数( transfer function)序列的傅里叶变换( discrete-time Fourier transform:DTFT)序列的傅里叶逆变换( inverse discrete-time Fourier transform:IDTFT )幅度响应( magnitude response)相位响应( phase response)量化( quantization)编码( coding)模数变换( A/D 变换: analog-to-digital conversion)数模变换( D/A 变换: digital-to- analog conversion)第8 章端口分析法( port analysis)状态变量( state variable)无记忆系统( memoryless system)有记忆系统( memory system)矢量矩阵( vector-matrix )常量矩阵( constant matrix )输入矢量(input vector)输出矢量( output vector)直接法( direct method)间接法( indirect method)状态转移矩阵( state transition matrix)系统函数矩阵( system function matrix)冲激响应矩阵( impulse response matrix)光学专业词汇大全Accelaration 加速度Myopia-near-sighted 近视Sensitivity to Light 感光灵敏度boost 推进lag behind 落后于Hyperopic-far-sighted 远视visual sensation 视觉ar Pattern 条状图形approximate 近似adjacent 邻近的normal 法线Color Difference 色差V Signal Processing 电视信号处理back and forth 前后vibrant 震动quantum leap 量子越迁derive from 起源自inhibit 抑制 ,约束stride 大幅前进obstruction 障碍物substance 物质实质主旨residue 杂质criteria 标准parameter 参数parallax 视差凸面镜convex mirror凹面镜concave mirror分光镜 spectroscope入射角angle of incidence 出射角emergent angle平面镜plane mirror放大率角度放大率 angularmagnification放大率:magnification折射refraction反射reflect干涉 interfere衍射diffraction干涉条纹interference fringe衍射图像diffraction fringe 衍射条纹偏振polarize polarization透射 transmission透射光transmission light光强度 ] light intensity电磁波electromagnetic wave振动杨氏干涉夫琅和费衍射焦距brewster Angle 布鲁斯特角quarter Waveplates 四分之一波片ripple 波纹capacitor 电容器vertical 垂直的horizontal 水平的airy disk 艾里斑exit pupil 出[ 射光 ]瞳Entrance pupil 入瞳optical path difference 光称差radius of curvature 曲率半径spherical mirror 球面镜reflected beam 反射束YI= or your information 供参考phase difference 相差interferometer 干涉仪ye lens 物镜 /目镜spherical 球的field information 场信息standard Lens 标准透镜refracting Surface 折射面principal plane 主平面vertex 顶点 ,最高点fuzzy 失真 ,模糊light source 光源wavelength 波长angle 角度spectrum 光谱diffraction grating 衍射光栅sphere 半球的DE= ens data editor Surface radius of curvature 表面曲率半径surface thickness 表面厚度semi-diameter 半径focal length 焦距field of view 视场stop 光阑refractive 折射reflective 反射机械专业英语词汇(大全)金属切削metal cutting机床machine tool tool 机床金属工艺学technology of metals刀具 cutter摩擦 friction传动 drive/transmission轴shaft弹性 elasticity频率特性frequency characteristic误差 error响应 response定位 allocation动力学dynamic运动学kinematic静力学static分析力学analyse mechanics 力学拉伸 pulling压缩 hitting compress剪切 shear扭转 twist弯曲应力bending stress强度 intensity几何形状geometricalUltrasonic 超声波精度 precision交流电路AC circuit机械加工余量machining allowance变形力deforming force变形 deformation应力 stress硬度 rigidity热处理heat treatment电路 circuit半导体元件semiconductor element反馈 feedback发生器generator直流电源DC electrical source门电路 gate circuit逻辑代数logic algebra磨削grinding螺钉 screw铣削 mill铣刀 milling cutter功率 power装配 assembling流体动力学fluid dynamics流体力学fluid mechanics加工 machining稳定性 stability介质 medium强度 intensity载荷 load应力 stress可靠性 reliability精加工 finish machining粗加工 rough machining腐蚀 rust氧化 oxidation磨损 wear耐用度durability随机信号random signal离散信号discrete signal超声传感器ultrasonic sensor摄像头CCD cameraLead rail 导轨合成纤维synthetic fibre电化学腐蚀electrochemical corrosion车架 automotive chassis悬架 suspension转向器redirector变速器speed changer车间 workshop工程技术人员engineer数学模型mathematical model标准件standard component零件图part drawing装配图assembly drawing刚度 rigidity内力 internal force位移 displacement截面 section疲劳极限fatigue limit断裂 fracture 破裂塑性变形plastic distortionelastic deformation 弹性变形脆性材料brittleness material刚度准则rigidity criterion齿轮gearGrain 磨粒转折频率corner frequency =break frequencyConvolution Convolution integral Convolution property Convolution sum 卷积卷积积分卷积性质卷积和Correlation function Critically damped systems Crosss-correlation functions Cutoff frequencies 相关函数临界阻尼系统互相关函数截至频率transistor diode semiconduct or nn晶体管二极管n半导体resistor n 电阻器capacitor n 电容器alternating adj 交互的amplifier n 扩音器,放大器integrated circuit 集成电路linear time invariant systems 线性时不变系统voltage n 电压,伏特数Condenser= capacitor n 电容器dielectric electromagnetic adj 电磁的adj 非传导性的deflection n 偏斜;偏转;偏差linear device 线性器件the insulation resistance 绝缘电阻anode n 阳极,正极cathode n 阴极breakdown n 故障;崩溃terminal n 终点站;终端,接线端emitter n 发射器collect v 收集,集聚,集中insulator n 绝缘体,绝热器oscilloscope n 示波镜;示波器gain n 增益,放大倍数forward biased 正向偏置reverse biased 反向偏置P-N junction PN 结MOS( metal-oxide semiconductor )金属氧化物半导体enhancement and exhausted 增强型和耗尽型integrated circuits 集成电路analog n 模拟digital adj 数字的,数位的horizontal adj, 水平的,地平线的vertical adj 垂直的,顶点的amplitude n 振幅,广阔,丰富multimeter n 万用表frequency n 频率,周率the cathode-ray tube 阴极射线管dual-trace oscilloscope 双踪示波器signal generating device 信号发生器peak-to-peak output voltage 输出电压峰峰值sine wave 正弦波triangle wave 三角波square wave 方波amplifier 放大器,扩音器oscillator n 振荡器feedback n 反馈,回应phase n 相,阶段,状态filter n 滤波器,过滤器rectifier n 整流器;纠正者band-stop filter 带阻滤波器band-pass filter 带通滤波器decimal adj 十进制的,小数的hexadecimal adj/n 十六进制的binary adj 二进制的;二元的octaladj八进制的n绝缘体;电解质domain n 域;领域code n 代码,密码,编码 v 编码 the Fourier transform 傅里叶变换 Fast Fourier Transform 快速傅里叶变换 microcontro ller n 微处理器;微控制器 assembly language instrucions n 汇编语言指令 chip n 芯片,碎片modular adj 模块化的;模数的 sensor n 传感器plugvt 堵,塞,插上 n 塞子,插头,插销coaxial adj 同轴的,共轴的fiber n 光纤 relay contact 继电接触器 ArtificialIntelligence 人工智能 Perceptive Systems 感知系统 neural network 神经网络 fuzzy logic 模糊逻辑intelligent agent 智能代理 electromagn etic adj 电磁的coaxial adj 同轴的,共轴的 microwav e n 微波charge v 充电,使充电 insulato r n 绝缘体,绝缘物 nonconducti ve adj 非导体的,绝缘的 simulati on n 仿真;模拟 prototyp e n 原型 array n 排队,编队 vector n 向量,矢量inverse adj 倒转的,反转的 n 反面;相反 v倒转 high-performance 高精确性,高性能 two-dimensional 二维的;缺乏深度的 three-dimensional 三维的;立体的;真实的。
一种电吸附攀爬机器人
Abstract —This paper describes a novel clamping technology called compliant electroadhesion, as well as the first application of this technology to wall climbing robots. As the name implies, electroadhesion is an electrically controllable adhesion tech-nology. It involves inducing electrostatic charges on a wall substrate using a power supply connected to compliant pads situated on the moving robot. High clamping forces (0.2–1.4 Newton supported by 1 square centimeter of clamp area, depending on substrate) have been demonstrated on a wide variety of common building substrates, both rough and smooth as well as both electrically conductive and insulating. Unlike conventional adhesives or dry adhesives, the electroadhesion can be modulated or turned off for mobility or cleaning. The technology uses a very small amount of power (on the order of 20 microwatts/Newton weight held) and shows the ability to repeatably clamp to wall substrates that are heavily covered in dust or other debris. Using this technology, SRI International has demonstrated a variety of wall climbing robots including tracked and legged robots.I. I NTRODUCTIONECENT events, such as natural disasters, military actions, or public safety threats, have led to an increased emphasis on robust reconnaissance robots, particularly ones traversing complex urban terrain in three dimensions. Innovative ground robots with good obstacle clearance capabilities typically use many modes of mobility such as wheeled or tracked motion [1], legged motion [2], or jumping motion [3]. However, the ability to scale or perch on vertical surfaces of buildings or other structures offers unique capabilities in military applications such as urban reconnaissance, sensor deployment, and setting up urban network nodes, as well as in civil search and rescue operations. The vertical mobility and perching abilities also have numerous commercial applications such as pipeline and tank inspection or accessing hard-to-reach areas for applications such as window cleaning [4]. In most of these cases, the use of a flying vehicle such as an MAV (Micro-Air Vehicle) represents a significant challenge in power consumption, complexity, and ability to navigate in confined spaces. There has thus been a sustained interest in wall-climbing robots that use a variety of different methods to clamp onto vertical substrates.All authors are with SRI International, 333 Ravenswood Avenue, Menlo Park, CA 94025. Corresponding author is Harsha Prahlad, phone: 650-859-3629, fax: 650-859-5510, and email: harsha.prahlad@.The most common commercially available wall-climbing robots use suction cups to create adhesion to some types of substrates [5]. Suction cups work only on smooth and non-porous surfaces, and magnetic wheel versions work only on ferromagnetic walls, both severe limitations in many cases. Other technologies that have been employed include conventional adhesive surfaces used to attach the robot to the wall. More recently, “dry adhesive” technologies that mimic gecko feet with tiny setae have been explored [6], [7]. These “dry” adhesives work using Van der Waals forces of attachment and offer good clamping forces with no residue left behind on the climbing surface. However, both conventional as well as “dry” adhesives suffer from being “always on,” which implies that they reduce their effectiveness over time by attracting dust, and require some power to overcome the adhesive forces in peeling away from the substrate during the robot motion. Another biomimetic approach that has been recently pursued is the use of an array of microspines to scale vertical walls that have some inherent surface roughness [8]. While this approach ensures good mechanical contact and is mostly independent of material contaminants or dust on a surface, it is difficult to climb on smooth surfaces with this approach. On larger scales, claws might be used for wall climbing in place of microspines, but claws may damage the substrate and are also inapplicable on smooth surfaces.In the current work, the authors present a new invention called electroadhesion aimed at addressing some of the shortcomings of previous technologies for wall climbing robots. Electroadhesion is based on the use of compliant surfaces with patterns of compliant electrodes designed to create electrostatic forces of attraction between an object (the robot) and a substrate (building surface). Electroad-hesion has been shown to operate with excellent adhesion pressures of up to 2 N/cm 2 on a wide variety of surfaces including materials such as concrete, wood, steel, glass, and drywall commonly found in and on buildings. Preliminary results also show the ability for good electroadhesive forces on damp surfaces such as damp concrete. A qualitative comparison of the relative advantages and limitations of electroadhesion versus other methods for wall climbing robots is listed in Table I.Electroadhesive Robots—Wall Climbing Robots Enabled by a Novel, Robust, and Electrically Controllable Adhesion TechnologyHarsha Prahlad, Ron Pelrine, Scott Stanford, John Marlow, and Roy KornbluhR2008 IEEE International Conference on Robotics and AutomationPasadena, CA, USA, May 19-23, 2008TABLE IC OMPARISON OF P ROPOSEDE LECTROADHESIONWITH C ONVENTIONAL C LIMBING T ECHNOLOGIES Technology Benefits LimitationsChemical adhesion (sticky feet) Low-energy cost when notmoving; quiet operationHigh-energy cost whenmovingSuction cups High adhesion forces onsmooth surfacesNoisy, weaker, and energyinefficient on roughsurfaces; requires separatepumping meansSynthetic gecko skin (van der Waals forces) Low-energy cost when notmoving; quiet operationTechnology not proven onmany surfaces; complexpeeling or high-energy costwhen moving; adhesiongreatly diminished by dustand possible moisture;limited lifetime; cannotclimb some plastic surfacesClaws, microspines Low-energy cost when notmoving; strong forces onsoft surfaces (e.g., wood);unaffected by dust ormoistureCannot climb glass, metal,or other smooth surfaces;leaves tracksElectroad-hesion (electrically controlled electrostatic attraction Adheres to a wide varietyof surfaces; low-energy costwhen moving; quiet opera-tion; simple, lightweight,compliant structure; can beswitched off for cleaning ofdust and liquidsRequires very smallamounts of power (~0.02mW/N of weight supported)to stay clampedII.E LECTROADHESION—O PERATING P RINCIPLEAND A DHESION C HARACTERISTICSAs shown in Fig. 1, electroadhesion uses electrostatic forces between the substrate material (wall surface) and the electroadhesive pads. These pads are comprised of conductive electrodes that are deposited on the surface of a polymer. When alternate positive and negative charges are induced on adjacent electrodes, the electric fields set up opposite charges on the substrate and thus cause electrostatic adhesion between the electrodes and the induced charges on the substrate. These charges do not neutralize themselves to those on the clamp because of the trapped air gaps (with dimensions on the order of surface roughness of the substrate) as well as insulator material on the clamp. The principle of operation is similar on some materials to electrostatic chucks used to hold silicon wafers [9] or other specialized grippers for robotic handling of materials [10]. We note that the same geometry of clamp can be used to clamp to both dielectric and conductive substrates, albeit with slightly different physical mechanisms.The clamps shown in Fig. 1 can be made in a variety of ways. High compliance of the clamp is key to being able to adhere to a wide range of substrate roughnesses. If high degree of compliance is desired, one can deposit compliant electrodes (typically carbon mixed into a polymer binder) as well as elastomeric insulators (e.g., silicones). However, it should be noted that some compliance could also be achieved by manipulatingthe boundary conditions of the clamps, as shown in the robot designs in Section III. Thus, more rigid materials such as metal or carbon coatings on rigid polymers such as Mylar or polyimide can also be used as the electroadhesive materials.Fig. 1. Basic clamp structure for an electroadhesive clamp. Since the clamp is compliant, it can conform to the surface roughness of the substrate material.Electroadhesive clamps are typically comprised of at least two sets of independent electrodes at different potentials. The charge on the electrodes are typically induced through the use of a high voltage power supply connected to the traces of the clamp material. We note that although the clamp material uses high voltage (typically 1–5 kilovolts), it needs very small amounts of currents (of the order of 10–20 nanoamps per Newton of lateral force) due to the presence of the insulation layer above the electrodes. Thus, commercially available low profile, low power DC-DC converters [11], [12] can be used to address the clamps. Fig. 2 shows the clamp attached to a large variety of materials. The weight or payload that can be supported by the pad’s per unit area depend on many parameters including the material properties and design of the clamp, the substrate’s structure, the morphology of electrodes, and voltages used by the clamp. Table II lists the clamping pressured on typical wall substrate materials. However, we note that the concept is readily scalable to large payloads, as illustrated by a 75 lb weight held using a clamp of approximately 300 square inches of electroadhesive pad shown in Fig. 2. Thus, electroadhesion is suitable to robotic applications involving large or small payloads (with allowance for a scaled-up area for a given clamping pressure).Since both the electrodes and the elastomer are highly compliant (through use of elastomeric materials and/or compliant boundary conditions), electroadhesive pads conform to rough surfaces (Fig. 3), enabling the electrodes to maintain a close proximity with the entire surface and thereby greatly increasing the overall clamping force. The importance of maintaining intimate contact is evident when one notes that in some regimes the electrostatic forces typically drop off as the distance squared.Fig. 2. Electroadhesive pads clamping and holding weights up on varioussurfaces.Fig. 3. Prototype electroadhesive pad conforming to a rough (concrete) surface.TABLE IIM EASURED C LAMPING P RESSURES ON A V ARIETY OF S UBSTRATES, M EASURED WITH 4 K V DC A CTUATION V OLTAGEMaterialMeasuredLateral Forceper Unit AreaP L (N/cm2)MeasuredFrictionalCoefficientEstimatedNormalPressure P N(N/cm2)Finished wood(shelf wood)0.55 0.4 1.375 Drywall 0.21 0.40 (estimated) 0.525 Paper 0.24 0.46 0.52Glass 0.41 0.45 0.84 Concrete (dry) 0.17 0.57 0.3 Concrete (damp) 0.08 0.40 (estimated) 0.2Steel 1.4 0.33 4.24Using the clamp shown in Fig. 1, we have successfully demonstrated aspects of electroadhesion that are critical for good vertical mobility: •High clamping pressures on a variety of substrates (wood, drywall, glass, concrete, steel, and a variety of plastics have been successfully tested to date).•Fast clamping and unclamping(response time <10–50 ms).•Ultra-low power for holding a static weight attached to a substrate (measured values are approximately 20 microW/Newton weight held).•Ability to conform to a surface roughness, around corners, and across materials with cracks or perforations in them.•Ability to clamp even with the presence of dust, dampness, or other surface impurities.•Ease of fabrication using off-the-shelf components and readily integratable into both specially designed robots and even off-the-shelf robots.•Electroadhesive clamps leave no marks on the surface (the robots can therefore be covert and non-damaging to the substrate materials).The clamping performance for vertical holding of a weight using electroadhesion can be most easily evaluated in terms of the normal clamping pressure (P N), the friction coefficient between substrate and clamp (µ), and the effective lateral clamping pressure (P L). The effective lateral clamping pressure P L is just the measured maximum lateral force without slippage divided by the clamp area. The three quantities are related byP L = µ P N or P N = P L /µ.P L is the most important figure of merit for wall climbing, where gravity exerts a lateral force on the clamp, and it can be increased either by increasing the normal clamping pressure P N or by increasing the friction coefficient. P N is the most important figure of merit for mobility on ceilings where gravity exerts a normal force.The measured electrostatic pressures on a variety of substrates are given in Table II. In some cases higher voltage can be used to significantly increase the values shown in Table II.From Table II, it can be seen that electroadhesion exerts sufficient forces to hold up a reasonable sized robot on almost all surfaces. For example, a robot with a mass of 200 g could climb up the wall using approximately 10 square cm of clamp area in the case of damp concrete. Assuming an additional factor of safety of 4 to compensate for dynamic forces during locomotion, 40 square cm (5 cm × 8 cm, for example) of track area is sufficient for robust locomotion. As we show later in this paper, these forces and areas have been demonstrated in several realistic robots.An additional useful feature for robotic design is the low power consumption of the electroadhesion clamps. For example, in the above case, the power to continuously hold 40 square cm of clamp has been measured to be approximately 0.25 mW on many of the substrates (power is low due to the presence of a good insulator betweensubstrate and clamp, or because the substrate is inherently fairly insulating). This implies that with a 50% conversion efficiency, in the worst-case scenario, two AAA batteries weighing 7.6 g each can hold up a robot in “perch” mode for almost one year (calculations assume AAA primary L-92 Lithium batteries from Energizer, Inc. with a capacity of 1250 mAh at a voltage of 1.5 V). Indeed, the power draw can be even lower and batteries made to last longer with other substrates or with higher fraction of battery mass to total robot mass (in some cases, decades of perch time may be feasible). Thus, the power required for electroadhesion is a very small fraction of that required for robot locomotion, and does not represent a significantly high fraction of robot weight.III.E LECTROADHESION-B ASED R OBOTS Because of the characteristics mentioned above, several types of wall climbing robots that employ electroadhesion can be envisioned. Indeed, electroadhesion can be used in combination with a number of climbing robots previously demonstrated. In particular, we illustrate some biomimetic and tracked robots that were implemented with electro-adhesive pads.We note that as in the case of other wall climbing technologies, resisting peeling moments is one of the major technical challenges that must be overcome in robot designs. The peeling moment comes from the fact that the center of gravity of the robot is a distance away from the wall, and tends to rotate the robot in a nose-up direction and off the wall. As with conventional adhesives, the force it takes to detach an electroadhesive pad from the wall is a sharp function of the angle of the applied load. Applying forces parallel to the clamp material tends to minimize peeling moment and maximize payload carrying ability. In some of our designs (such as the flap or double-tank versions described below), peeling is inherently minimized by the flap geometries. In other robots (such as a simple tank version), peel resistance is provided solely by the use of “tails” that are preloaded against the wall. The use of such “tails” to provide counter moments has been inspired by nature [13] and used in previous wall-climbing robots [7], [8], [14]. Where possible, the weight of the discrete robot components such as motors and batteries were shifted to the tail and close to the substrate to enable the robot body to be as flat against the wall as possible with minimum peeling forces.A.Tracked / Wheeled RobotsElectroadhesion lends itself well to conventional wheeled and tracked robots and can use the inherent speed and simplicity advantages of these types of robots. In these cases, electroadhesion can be retrofitted to conventional ground robots. The most successful robot configuration that was demonstrated involves flexible electroadhesive flaps that are attached to a central drive tank as shown in Fig. 4. In this design, compliant flaps attach to the wall with very little resistance. Since the flaps are attached only at the bottom side, the force exerted by the robot on the flap is almost exclusively in shear and not in the peel direction. This kind of loading helps maximize the forces that the flaps can exerton the wall.Fig. 4. Schematic of tank-type robot with flexible electroadhesive paddles or flaps. The pads are loaded parallel to their surface, thereby minimizing peel.The tracks in this case use a chain or belt drive attached to an electroadhesive surface that can conform around rough or uneven surfaces. In this fashion, the entire robot is surrounded by an electroadhesive surface. An imple-mentation of this robot climbing a wooden door is shown in Fig. 5. This design offers the advantage of providing a large electroadhesive surface area without requiring an appreciable normal force or intimate initial contact with the substrate (due to compliance of the flaps). In addition, this type of design offers a reliable, robust, and proven way for locomotion on unstructured terrain, and has been proven in ground-based robots with less compliant legs replacing the flaps in this case [2]. The robot shown in Fig. 5 had a weight of 180 g without onboard batteries and RC control, and weighed 220 g with onboard batteries and control. This robot was demonstrated to climb various surfaces with speeds of up to 15 cm/s. The electroadhesive tread footprint was approximately 20 cm ×12 cm (not counting driving treads located on the tail as shown). A simple brush mechanism consisting of a preloaded wire physically contacting the electroadhesive treads was used to transfer charge from the fixed robot frame to the rotating tracks as shown in Fig. 5. If necessary, a set of brushes of a commutator that charges up the tracks when they are about to contact the wall and discharges when they are about to peel away from the wall can be used to minimize peeling forces. However, such a mechanism is not necessary and was not implemented in the current configuration (one can simply use the motor drive to peel the electroadhesive track from the wall on the back of the robot). The disadvantage of this design is that in order to turn left or right, the tracks must slide relative to the surface. It may therefore be necessary to build two sets of tracks, such that the tracks can be swiveled one at a time after their electroadhesion is switched off and one of the two sets of tracks can remain attached to the wall at all times. Turning was notimplemented in our first proof-of-principle robots, and willbe investigated in the future.Fig. 5. Tank-type robot with flaps climbing on a wooden door. The flaps are attached to an electroadhesive surface, which is in turn attached to the tank treads driven by the motor. Power and control were offboard in this example, although other robots with RC control and onboard power were also demonstrated.Other examples have also been successfully demonstrated at SRI. The simplest configuration involves a tank-type robot where the tread is covered with an electroadhesive surface (without the flaps from Figs. 4 and 5). However, these designs suffer from less robust peel resistance when compared with the flapped version or the double-tank version shown in Fig. 6. In this double-tank configuration, two tank robots are joined at a central pivot point. In our implementation of this double-tank design, the two tanks were fixed to each other (i.e., the pivot point was locked) and the upper tank was a lightweight, purely passive tank that provided a moment opposing peeling moments on thelower tank.Fig. 6. Hinged double track design. Wheels are replaced by treads in order to offer greater surface area for electroadhesion.This basic flap design can also be implemented into a fixed diameter wheel, as shown in Fig. 7. As the wheels of the robot rotate, each electroadhesive pad comes into contact with the substrate and is flattened against the wheel, providing the required clamping forces. Turning of the robot requires reduced sliding of the pads when compared with the tank design, and is a possible advantage of this design. Depending on their design, these flaps could also be used as paddle wheels for amphibious motion. Similar robot designs involving the use of flexible pads attached to rotating wheels have been successfully demonstrated for climbing robotsusing conventional adhesive feet [14].Fig. 7. Hinged flexible pad design. Each wheel on the vehicle has radial electroadhesive pads that come into contact with substrate and cause electroadhesion.The tracks of wheeled robots as shown above were driven using conventional motor-gearbox combinations (Tamiya 72004 High Torque Worm Gearmotor) powered by conventional or high power batteries (six conventional AAA, two parallel sets of three in series). These components were typically located in the tail of the robot to minimize peeling torque due to their height. The batteries also directly powered the electroadhesive film through the use of a commercially available DC-DC high voltage converter [11], [12]. A schematic of the power flow in these robots is givenin Fig. 8.Fig. 8. Schematic of power supply to the robot and operation of electroadhesive clamps.B. Biomimetic RobotsSince the electroadhesive clamping can be switched on and off in sequence with fast response times, the technology is well suited for a variety of biomimetic robots. For example, in conjunction with an Electroactive Polymer Artificial Muscle rolled actuator, we demonstrated the feasibility of inchworm-style wall climbing robots using electroadhesion on steeply inclined surfaces (Fig. 9). This robot used an inchworm gait (where one electroadhesive pad is clamped at a time) and was tethered. SRI first demonstrated the ability for this simple and lightweight robot to climb metallic substrates using simple electrostatic clamping (where the metallic substrate served as one of the electrodes). In this example, a robot of length 1 cm and weight approximately 20 g was demonstrated with pads of approximately 1 cm × 1 cm active area (Fig. 9a). This robot was demonstrated to travel at speeds of up to 4 cm/s (two body lengths per second) attached to metal surfaces of any orientation. In another example, the actuator and pads were designed to climb some commonly encountered paper, wood, and metallic substrate materials using electroadhesion (Fig. 9b). In this example, the roll actuator was approxi-mately 5 cm in length, 1.5 cm in diameter, and weighed about 40 g (power to drive the multifunctional electro-elastomer roll as well as the electroadhesive clamps was offboard). The electroadhesive pads had an active area of about 15 square cm each. To achieve fast unclamping, the electroadhesive clamps were driven with a bipolar AC signal (±3 kV peak, 30 Hz frequency) synchronized with actuation of the rolled actuator (5 kV square wave). Using actuation frequencies of 5 Hz for the rolled actuators, we measured climbing speeds of approximately 0.1 body length/second(1 cm/s).16 mm(a) Older inchworm-type robot (using electrostatic clamping on metals)(b) Newer electroadhesive robot (using electroad-hesion for clamping on all materials)Fig. 9. Prototype inchworm-type climbing robots with an electroactive polymer roll actuator coupled to electroadhesive pads that are switched on or off in sequence.IV. C ONCLUSIONElectroadhesion is a promising novel technology for wall climbing robots. It offers advantages over other types of technologies for wall climbing including robust clamping over a variety of surfaces (rough or smooth, conductive or insulating), low power, being resistant to dust, and having fast and electrically controllable clamping and unclamping. Thus, electroadhesion lends itself to a variety of wall climbing robots. Tracked “tank” type wall climbing robots, as well as more biomimetic inchworm-type robots have been successfully demonstrated to date using this technology. “Tank” type robots with electroadhesive flaps show the greatest promise for implementation into fast wall climbing robots since they minimize loading in the peel direction. Although the static properties of the clamps are well characterized and result in robust and fast wall climbing, more research is required to fully characterize the dynamic as well as peel properties of these clamps and to translate that to the dynamic mobility of the wall-climbing robots.R EFERENCES[1] R. Volpe, J. Balaram, T. Ohm, and R. Ivlev, “The Rocky 7 MarsRover prototype,” in Proceedings of the IEEE / RSJ Intelligent Robots and Systems Conference , vol. 3, pp. 1558–1564, Osaka, Japan, 1996. [2] U. Saranli, M. Buehler, and D.E. Koditschek, “Rhex: A simple andhighly mobile hexapod robot,” Int. J. of Robotics Research . vol. 20, no. 7, pp. 616–631, 2001.[3] J. German, “Hop to it: Sandia hoppers leapfrog conventional wisdomabout robot mobility,” Sandia Lab News , vol. 52, No. 21, October 20, 2000, available online at /LabNews/LN10-20-00/hop_story.html.[4] T. Miyake and H. Ishihara, “Mechanisms and basic properties ofwindow cleaning robot,” in Proceedings of 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics , vol. 2, pp. 1372–1377, 2003.[5] For example, “Climbatron” window climbing robot, online at/estore/cart/Climbatron.cfm.[6] K. Autumn, A. Dittmore, D. Santos, M. Spenko, and M. Cutkosky,“Frictional adhesion: A new angle on gecko attachment,” Journal of Experimental Biology , 209, pp. 2569–3579, 2006.[7] M. Sitti and R. S. Fearing, “Synthetic gecko foot-hair micro/nano-structures as dry adhesives,” Journal of Adhesion Science and Technology , vol. 17, no. 8, p 1055, 2003.[8] A. Asbeck, S. Kim, M.R. Cutkosky, W.R. Provancher, and M.Lanzetta, “Scaling hard vertical surfaces with compliant microspine arrays,” International Journal of Robotics Research , vol. 15, no. 12, pp. 1165–1180, 2006.[9] K. Yatsuzuka, J. Toukairin, K. Asano, and S. Aonuma, “Electrostaticchuck with a thin ceramic insulation layer for waferholding,” IEEE Thirty-Sixth Industry Applications Conference Annual Meeting , vol. 1, issue 30 Sep–4 Oct 2001, pp. 399–403, 2001.[10] G. Monkman, “Electroadhesive microgrippers,” Ind ustrial Robot: AnInternational Journal , vol. 30, 2 July, no. 4, pp. 326–330, 2003.[11] “Q” series DC-DC convertors from Emco High Voltage Corporation,Sutter Creek, CA, online at .[12] Series “AV” DC-DC convertors from Pico Electronics of Pelham,NY, online at /dcdclow/avhigh.htm. [13] K. Autumn, S.T. Hsieh, D.M. Dudek, J. Chen, C. Chitaphan, and R.J.Full, “The dynamics of vertical running in geckos,” The Journal of Experimental Biology , vol. 209 (2), pp. 260–272, 2006.[14] K.A. Daltorio, A.D. Horchler, S. Gorb, R.E. Ritzmann, and R.D.Quinn, “A small wall-walking robot with compliant, adhesive feet,” Int. Conf. on Intelligent Robots and Systems (IROS '05), Edmonton, Canada, 2005.。
真空衰减法 英语

真空衰减法英语The Vacuum Decay MethodThe vacuum decay method is a fascinating and complex phenomenon in the field of quantum mechanics. This process, also known as false vacuum decay, occurs when the universe transitions from a metastable state to a more stable state, resulting in the release of a large amount of energy. This topic has captured the attention of physicists and cosmologists alike, as it has significant implications for our understanding of the fundamental nature of the universe.At the heart of the vacuum decay process is the concept of the quantum vacuum. In quantum field theory, the vacuum is not simply an empty space but rather a dynamic entity that is filled with virtual particles constantly appearing and disappearing. These virtual particles are the result of the uncertainty principle, which allows for the temporary creation of particle-antiparticle pairs from the vacuum. While these pairs are short-lived, they can have a significant impact on the overall state of the vacuum.The vacuum can exist in different states, known as "true" and "false"vacua. The true vacuum is the state of lowest energy, where the universe is in its most stable configuration. The false vacuum, on the other hand, is a metastable state, where the energy of the system is higher than the true vacuum, but the system is trapped in a local minimum. This metastable state can persist for a long time, but it is inherently unstable and can eventually decay to the true vacuum.The vacuum decay process is triggered by the formation of a bubble of the true vacuum within the false vacuum. This bubble can be thought of as a region where the field configuration has transitioned to the true vacuum state. As this bubble expands, it releases a large amount of energy, which can have dramatic consequences for the surrounding space-time.The rate at which the vacuum decay occurs is determined by the properties of the false vacuum and the potential energy barrier that separates it from the true vacuum. This rate is typically extremely slow, with the lifetime of the false vacuum being many orders of magnitude longer than the current age of the universe. However, under certain conditions, such as the presence of high-energy particles or the application of strong external fields, the rate of vacuum decay can be significantly increased.The implications of the vacuum decay process are far-reaching and have been the subject of extensive research in theoretical physics.One of the most significant consequences is the potential for the universe to undergo a catastrophic phase transition, where the false vacuum suddenly collapses, releasing an enormous amount of energy. This could potentially lead to the destruction of the entire observable universe, as the true vacuum state may be incompatible with the existence of the fundamental particles and forces that we observe.Another implication of the vacuum decay process is its potential impact on the evolution of the universe. If the false vacuum were to decay, it could lead to the formation of new regions of space-time with different physical laws and properties. This could have profound consequences for the structure and evolution of the cosmos, potentially altering the course of cosmic history.Despite the potential dangers of the vacuum decay process, it also holds promise for applications in theoretical physics and cosmology. For example, the study of vacuum decay can provide insights into the nature of the fundamental forces and the structure of the universe at the most fundamental level. Additionally, the energy released during the decay process could potentially be harnessed for technological applications, such as the generation of clean and sustainable energy.In conclusion, the vacuum decay method is a fascinating andcomplex phenomenon that continues to captivate the scientific community. As our understanding of this process deepens, it is likely that we will uncover new and exciting insights into the nature of the universe and the fundamental laws that govern it. Whether the vacuum decay process ultimately leads to the destruction or transformation of the cosmos, it remains a topic of intense interest and ongoing research in the field of theoretical physics.。
消防英语专业词汇(A)

消防英语专业词汇(A)消防英语专业词汇(A)消防英语专业词汇(A)" do-it-yourself " explosive 现混炸药" do-it-yourself " mixture 现场配置炸药" do-your own" explosive 现混炸药"b" blasting powder "b"级炸药含72%硝酸钠"can handle" "能对付" 火灾紧急情况现场消防队发回的信息"defense in depth" philosophy "纵深防御"原则"mixed on the job" blasting agent "工地配制"的炸药"nothing showing" "无迹象""quarterly" "季刊" 美国消防协会以前的杂志"red fume" "红色瓦斯" 爆炸时炸药所产生的毒气"super k" "超-k""ultra-safe" explosive "超级安全"炸药"v" burn pattern v形痕迹在火灾低点0integrated disaster preparedness 综合灾害防治1-propanol 1-丙醇2-methyl-1-butene 2-甲基-1-丁3-methyl-1-butene 3-甲基-1-丁烯a blasting powder a级炸药主要用于露天矿a-bomb 原子弹a.a.r = against all risks 综合险a=absorptivity 吸收率aa = auto-alarm 自动报警aaas = american association for the advancement of science 美国科学促进协会aab = aircraft accident board 飞行事故调查委员会aac = automat and automatical control 自动装置与自动控制aacc = american association for contamination control 美国污染控制协会aacc = american automatic control council 美国自动控制委员会aae = american association of engineers 美国工程师协会aaec=australian atomic energy commission 澳大利亚原子能委员会aaee = american association of electrical engineers 美国电气工程师协会aain = american association of industrial nurses 美国工业护士协会aaj = architectural association of japan 日本建筑协会aar = aircraft accident report 飞机事故报告aas = american academy of scienceaas resin aas 树脂aasw = american association of scientific workers 美国科学工作者协会ab = absolute 绝对ab = accumulator and buffer 累加器及缓冲器ab = air-breaker 空气断路器abandonment 离弃abatement of smoke 消减烟雾abaxial 轴外的abbreviated dial system 缩位拨号系统abbreviated dialing 缩位拨号abbreviated notation 简化符号abc extinguisher abc灭火器abc method 心肺复苏法abc powder extinguishing agent abc干粉灭火剂abdomen 腹abeam 正横abel closed cup flash point apparatus 阿贝尔闭杯闪点测定仪abel-pensky flash point test 阿贝尔-平斯基闪点试验aberration 失常abidance by law 遵守法律abidance by rule 遵守法规abih =american board of industrial hygiene 美国工业卫生委员会ability grouping 按学力分班ability test 才能测验abirritant 缓和药ablating heat shield 烧蚀热防护ablation characteristics 烧蚀特性ablation factor 烧蚀因素ablation front 烧蚀正面ablation mechanism 烧蚀机理ablation of melting body 熔融物体的烧蚀ablation phenomenon 烧蚀现象ablation protection 烧蚀防护ablation temperature 烧蚀温度ablation velocity 烧蚀速率ablation 消融ablation-product radiation 烧蚀生成物辐射ablative degradation 烧蚀破坏ablative heat protection 烧蚀防热ablative leading edge 烧蚀前缘ablative mechanism 烧蚀机理ablative water 增稠水添加了增稠剂的水ablative-cooled refractory 烧蚀冷却的耐火材料ablaze 着水abnormal climate 异常气候abnormal combustion 异常燃烧发动机爆震abnormal condition 反常情况abnormal operation test 非正常操作试验abnormal risk 异常危险abnormal state 异常状态abnormal 反常的abnormality 异常abort escape system 紧急疏散系统abort handle 应急把手abort light 紧急故障信号abort 投放水above ground storage tank 地上贮槽above hydrant 地上式消火栓abrasion resistance 耐磨性abrasion test 耐磨试验abrasion 磨损abrupt discharge 猝然排出abrupt wind 烈风abs =american bureau of standards 美国标准局abs resin abs树脂abscissa 横标absenteeism 旷工absolute alcohol 纯酒精absolute atmosphere 绝对大气压absolute error 绝对误差absolute humidity 绝对湿度absolute instability 绝对不稳定absolute instrument 绝对测试仪除了长度-时间-质量测定之外absolute manometer 绝对压力计absolute pressure 绝对压力absolute system of unit 绝对单位制absolute temperature scale 绝对温标absolute temperature 绝对温度absolute threshold 绝对阈absolute vacuum 绝对真空absolute viscosity 绝对粘度absolute zero 绝对零度absorbed dose 吸收剂量absorbed gas 吸附状态气体absorbent cotton 脱脂棉absorbent for confining spills 限制溢出物蔓延的吸收性材料absorbent 有吸收能力的absorber 吸收剂absorbing gas 吸附性气体absorbing medium 吸收性材料锯屑absorptance 吸收比〔性absorption band 吸收absorption coefficient 吸收系数absorption edge 吸收端absorption factor 吸收因数absorption line 吸收线absorption of heat 热的吸收absorption spectroscopy ;吸收光谱法absorption spectrum 吸收光谱absorptivity 吸收能力abstract ability 概括能力abutment (支ac = actinium 锕ac = alternating current 交流电ac = altocumulus 高积云ac resistance and reactance 交流阻抗指电缆在3相500伏ac system 交流系统accelerant 催速剂accelerated aging test 加速老化试验accelerating pump 加速泵acceleration 加速(度accelerator 加速装置〔泵accelerometer 加速度表〔器acceptable cost approach 可接受成本法acceptable damage 可接受的损害acceptable explosive 合格炸药acceptable fire risk 容许的火险acceptable performance 可接受的性能acceptable quality level 验收质量标准acceptable quality 可接受的质量acceptable reliability level 可靠性合格标准acceptable risk level 可接受风险水平acceptable risk 可接受风险acceptance condition 合格条件acceptance criteria 验收要求acceptance point 接受点acceptance requirement 验收要求acceptance test 验收试验acceptance trial 验收试验accepted engineering requirement 认可的设计要求accepted load 使用荷载accepted value 常用值access control 通路管制access cover 检修盖access door 检修门access hook 铁爬梯access opening 检修孔access panel 检修孔盖板access ramp 入口坡道access room 通道房间access stairs 内部楼梯access step 登甲板踏板access to elevators 电梯通道access well 交通竖井access 入口accessibility burn 可及性烧除accessibility 可及度accessible area of refuge 容易到达的避难区accessible means of egress 容易到达的出口设施accessible 可进入的accessory occupancy 附属用房accessory 附属的accident analysis 事故分析accident and sickness benefits 事故和疾病补助accident arson fire 事故式纵火accident at sea 海上事故accident at work 操作事故accident boat 救生艇accident cause 事故原因accident compensation 事故损失赔偿accident cost 事故造成的经济损失accident due to negligence 过失责任事故accident environment 发生事故的环境accident experience 事故指数accident fault 事故损坏肇事accident fire 失火accident force 不可抗力accident free 无事故accident frequency 事故频率accident hazard 事故危险accident in flight 飞行事故accident insurance 事故保险accident investigation team 事故原因调查组accident investigation 事故原因调查accident involving civil liability 民事责任事故accident involving criminal liability 刑事责任事故accident liability 事故易发性accident location 事故地点accident on board 船上发生的事故accident origin 事故起源accident potential 事故隐患accident prevention program 事故预防计划accident prevention rule 事故预防规划accident prevention 事故预防法accident probability 事故可能性accident proneness 易出事故accident rate 事故率accident record 事故记录accident reduction bonus 安全奖金accident repeater 屡出事故者accident reporting 事故报告accident spot map 肇事现场图accident statistics 事故统计资料accident susceptibility 易出事故accident type 事故类型accident 事故accidental activation 意外启动accidental alarm 误报accidental damage 意外损失accidental death 事故死亡accidental discharge 走火accidental error 偶然误差accidental explosion 意外爆炸accidental ignition 意外发火accidental operation 误动作accidental work injury 工伤事故acclimatization 适应(气候accommodation coefficient 调节系数accommodation stairway 简易楼梯accommodation time 调节时间accommodation 适应accompanying fire 伴随性火灾accordion fold 带束叠装accordion horseshoe load 马蹄形叠装accordion hose load 车载带束叠装的水带accordion hose 带束叠装的水带accountability 负有责任accreditation 鉴定accumulated dose 积累剂量accumulation of gases in coal 煤中气体的积聚accuracy 准确acetate 乙酸盐acetic acid 醋酸acetic aldehyde 乙醛acetone 丙酮acetoning equipment 丙酮贮存设备acetonitrile 乙腈acetylene cutter 乙炔气割工具acetylene cylinder 乙炔气瓶acetylene gas 乙炔气acetylene generator house 乙炔发生器站acetylene generator 乙炔发生器acetylene series 炔属烃acetylene 乙炔acfm = actual cubic feet per minute 每分钟立方英尺的实际流量在工作温度和压力下的气体的实际流量acgih = american conference of governmental industrialhygienists 美国政府工业卫生工作者会议achieved reliability 达到的可靠性achievement test 成绩测验achromatic 无色的aci = american concrete institute 美国混凝土协会acid anhydride 酸酐acid content 酸性物acid number 酸值acid pickling 酸洗〔浸acid rain 酸雨acid refractory 酸性耐火材料acid salt 酸式盐acid spill 酸的溢出acid 酸acidic waste 酸性废料acidity 酸度acil = american council of independent laboratories 美国独立实验室协会ackermann steering 梯形转向装置acknowledgement 接到通知acn = artificial cloud nucleation 人造云造雨法acnot = accident notice 事故通知acoustic board 吸音板acoustic dispersion 声散acoustic emission detection 声发射探测acoustic ground detector 声波地下探测器acoustic methanometer 发声沼气检定仪acoustic reflex 声反射acoustic trauma 听觉损伤acoustic 听觉的acoustical tile 吸声砖acoustics 声学acquired building 获准建筑获得房主的允许acre 英亩acrylic ester 丙烯酸酯acrylic fiber 丙烯酸纤维acrylic resin 丙烯酸树脂acrylic 丙烯酸的acrylonitrile 丙烯腈acs = american chemical society 美国化学学会act in violation of regulation 违章行为act of god 天灾acting 代理的actinic 光化的actinide series 锕类元素action plan 灭火作战计划action 灭火行动actionable fire 需要扑救的火activated carbon 活性碳activated charcoal 活性木炭activated complex 活性络合物activating signal 启动信号activation analysis 激活分析activation device = trigger device 启动装置activation energy 激活能activation 激活activator 激活剂active approach 积极法active button 起动按钮active combustion 有效燃烧active fire control 主动灭火active fire precaution 主动防火active fire protection system 主动消防系统active gas 活性气体active head 有效水头active learning 主动学习active material 活性材料active multiplex system 主动多工制active oxygen 活性氧active redundancy 有源过剩信息active service 现役active smoke control system 主动式烟气控制系统active source 放射源activity coefficient 活度系数activity fuel 操作形成可燃物经采伐或疏伐形成木材activity sampling 业务抽查activity 活性actual address 有效。
材料科学专业英语词汇(V)

vacuum bag 真空袋vacuum bag molding 真空袋模制vacuum chuck of rotary table 旋转台真空吸盘vacuum chuck stage 真空吸盘夹片台vacuum drawing 真空拉制vacuum drying equipment 真空乾燥设备vacuum embedding 真空嵌置vacuum evaporation system 真空蒸镀系统vacuum firing 真空烧制vacuum forming 真空成形vacuum hopper 真空喂料斗vacuum kneader 真空捏和机vacuum loading systems 真空加料系统vacuum metallizing (see also metallizing)真空喷金属vacuum mixer 真空混合机vacuum molding 真空成型vacuum pad 真空吸盘vacuum plate 真空吸附板vacuum press 真空压机vacuum pugmill 真空捏泥机vacuum venting 真空通气vacuum-forming molds 真空成形模vacuum-metallized aluminum coatings 真空喷铝箔vacuum/ nonvacuum 真空吸附/非真空吸附vacuum/nonvacuum 真空吸附/非真空吸附valine 深感印刷valley printing 砾壳斗valley tile 天沟瓦valonia 阀节喷嘴valve gating nozzles 阀valving 阀调V an der Pauw's method 范德伯斯法vanadium compounds 钒化合物vanadium yellow 钒黄vane feeder 叶轮饲机vanillin 香草精vapor barriers (see barriers, vapor)汽障壁vapor diffusion 蒸汽扩散vapor drying equipment 蒸汽乾燥设备vapor phase cleaning equipment 汽相洗条设备vapor phase epitaxial growth system 汽相磊晶生长系统vapor-deposition polymerization 蒸汽凝积聚合vapor-phase acetylene process 气相乙炔方法vapor-phase chromatography (see gas chromatography)气相移差术vapor-phase reactions 气相反应vapor-pressure lowering 蒸气压落降vapor-pressure osmometer 蒸开压渗压计vaporization 汽化vaporized solution source CVD 汽化液体源CVD variable-heating-rate method 可变加热法variable-height impact tester (VHIT)可变高度冲击试验机varistor [热]变[富]阻器;[热]变[电]阻体varnish gums 胶漆varnish resins 树鲁漆varnished cambric 涂漆麻纱varnishes 水漆vascular grafts 血管接枝vat dyeing 瓮染法vat dyes 瓮染料V ebe apparatus 韦伯仪器vector correlation method 向量相关法vegetable fault 植物杂质vegetable fiberboard 植物纤维板vegetable fibers (see fibers, vegetable)植物纤维vegetable oils 植物油vegetable parchment 假羊皮纸vegetable tannages 植物鞣革vegetable waxes 木蜡vegetable-oil acids 植物油酸vehicular applications 车辆用途vehicular armor 车辆装甲veil mats 罩网vein graphite 脉石墨vein quartz 脉石英V ello machine 韦乐制管棒机vellum 牛皮纸vellum glaze 革光釉velocities 速度velocity 速度velocity gradient 速率坡veneering 面饰法vent 通气孔venting 通气verdazyl polyradicals 四联氮基聚基verge 山墙詹口V erilog hardware description languageV erilog 硬体记述语言vermiculite 屋石V ertical Bridgman method 垂直型布里志曼法vertical lighting 纵向照度,竖直照明vertical low pressure CVD system 垂直型低压CVD装置vertical molding machines 直立模造机vertical pugmill 立式捏泥机vertical spindle rotary table surface grinding machine 垂直轴旋转盘表面研磨机vertical-movement blow-molding machines 直动吹模机vertical-surface laminates 直纹层板vertically braided hose 纵编结管vesicular structure 多孔结构vessel members 管节vetch seed flour 大巢菜粉VHDL initiative towards ASICVHDL 推动ASIC资料库标准或活动VHDL simulator VHDL模拟器VHSIC hardware description language 超大规模积体电路(VHSIC)viability control 生育控制vibrating ball mill 振动球磨机vibrating conveyer 振运机vibrating screen 振动筛vibration damping 振动衷减vibration frequencies 振动频率vibration insulators 隔振器vibration modes 振动模式vibrational scattering 振动散射vibrational transitions 指动史换vibrational-rotational states 振动转动体态vibratory multi-band saw 震动式多条带锯子vibroscope 示振器Vicat needle 非卡针vicat softening-point test 域克软点试验Vickers hardness tester 韦克硬度计Vicotoria green 维多利选绿vicuna wool 驼马毛view port 观察窗口vignetting 晕迈玻璃法Vigoureux pronting 维高力斯印刷vinal fibers 聚乙烯醇纤维vinyl -2-bromomyristate2- 溴十四酸乙烯vinyl 1-naphthoate1- 奈酸乙烯vinyl 10,12-octadecadienoate10,12- 烯十八碳酸乙烯vinyl 12-hydroxystearate12 羟硬酯酸乙烯vinyl 2-bromocaprate2- 溴癸酸乙烯vinyl 2-bromocaproate2- 溴已酸乙烯vinyl 2-bromolanrate2- 溴十二酸乙烯vinyl 2-bromopalmitate2- 溴软脂酸乙烯vinyl 2-bromostrarate2- 溴硬脂酸乙烯vinyl 2-chloroethyl ether2- 氯乙基乙烯醚vinyl 2-ethylbutyrate2- 乙基丁酸乙烯vinyl 2-naphthoate2- 奈酸乙烯vinyl 2-naphthoxyacetate2- 奈氧基醋酸乙烯vinyl 2-naphthylacetate2- 奈基醋酸乙烯vinyl 9,10-dihydroxystearate9,10- 双羟基硬脂酸乙烯vinyl 9,10-epoxystearate9,10- 环氧硬脂酸乙烯vinyl 9-hydroxystearate9- 羟硬酯酸乙烯vinyl abietate 松香酸乙烯vinyl acetate 醋酸乙烯vinyl acetate copolymer 醋酸乙烯共聚体vinyl acetate polymerization 醋酸乙烯聚合vinyl acetate polymers (see poly vinyl acetate)醋酸乙烯聚体vinyl acetate-grafted cotton 醋酸乙烯接枝棉vinyl acrylate 丙稀酸乙烯vinyl adipate 已二酸乙烯vinyl alcohol polymers (see poly vinyl alcohol)乙烯醇聚体vinyl alkyl ether polymers 乙烯基烷基醚聚体vinyl ally1 adipate 已二酸乙烯丙烯vinyl ally1 sebacate 泌酸乙烯丙烯vinyl allyl diglycolate 氧化双乙酸乙烯丙烯vinyl allyl fumarate 反丁烯二酸乙烯丙烯vinyl allyl succinate 琥珀酸乙烯丙烯vinyl amyl succinate 戊基琥珀酸乙烯vinyl anthracene-1-carboxylate1- 羰酸※乙烯vinyl atropate 苯基丙烯酸乙烯vinyl benzenesulfonate 苯矿酸乙烯聚体vinyl benzoate 苯甲酸乙烯vinyl boron compounds 乙烯基硼化物vinyl brassylate 十一碳双酸乙烯vinyl bromide copolymers 溴乙烯共聚体vinyl bromide polymers 溴乙烯聚体vinyl bromoacetate 溴醋酸乙烯vinyl butanesulfonate 丁基矿酸乙烯vinyl butoxyacetate 丁氧基醋酸乙烯vinyl butyl ether polymers 乙烯基丁基迷聚体vinyl butyl sulfate 硫酸乙烯丁基vinyl butyral polymers 缩丁醛乙烯聚体vinyl butyrate 丁酸乙烯vinyl campholate 冰片酸乙烯vinyl caprate 癸酸乙烯vinyl caproate 已酸乙烯vinyl caprylate 辛酸乙烯vinyl chloride 氯乙烯vinyl chloride copolymers 氯乙烯共聚体vinyl chloride fibers 氯乙烯纤维vinyl chloroacetate 氯化醋酸乙烯vinyl chlorodifluoroacetate 一氯二氟醋酸乙烯vinyl chloroformate 氯甲酸乙烯vinyl chloropropionate 氯丙酸乙烯vinyl cinnamate 苯乙烯酸乙烯vinyl compounds 乙烯化物vinyl copolymerization 乙烯共聚合vinyl coumarilate 苯并伏喃酸乙烯vinyl crotonate 丁烯酸乙烯vinyl cyanide polymers 青乙烯聚体vinyl cyclohexyl carboxylate 环已基羧酸乙烯vinyl decanoate 癸酸乙烯vinyl decyl adipate 已二酸乙烯癸基vinyl dialkyldithiocarbamates 双烷基双硫代氨基甲酸乙烯vinyl dichloroacetate 二氯醋酸乙烯vinyl diethylcarbamate 双乙基氨基甲酸乙烯vinyl dispersions 乙烯播散剂vinyl dodecanoate 十二酸乙烯vinyl ehyl ether polymers 乙烯乙基迷聚体vinyl ehyl malonate2- 乙基已基苯二甲酸乙烯vinyl ehyl oxalate 丙二酸乙烯,乙基vinyl enanthate 庚酸乙烯vinyl episulfide 环硫乙烯vinyl ester polymers 乙烯酯聚体vinyl ether polymers 乙烯迷聚体vinyl ethers 乙烯迷vinyl ethyl brassylate 十三碳双酸乙烯,乙基vinyl ethyl fumarate 反丁烯(转载自第一范文网,请保留此标记。
真空获得技术 英语

真空获得技术英语Vacuum Obtaining Technology.Vacuum obtaining technology refers to a set of techniques and methods used to create and maintain a vacuum environment. A vacuum, defined as a space with a very low pressure, is essential in various industries and applications, including electronics, manufacturing, research, and more. In this article, we will explore the principles, methods, and applications of vacuum obtaining technology.Principles of Vacuum Obtaining Technology.The fundamental principle of vacuum obtaining technology is to remove air and other gases from a sealed chamber or system to create a low-pressure environment. This is achieved through various vacuum pumps and other equipment that can effectively evacuate the gases.There are several types of vacuum pumps, each with its own advantages and disadvantages. Some common types include:1. Mechanical Pumps: These pumps use rotating vanes, pistons, or other mechanical elements to create a vacuum by displacing air. They are typically used in lowto medium-vacuum applications.2. Diffusion Pumps: Diffusion pumps use a heatedelement to diffuse and condense gases, achieving high vacuum levels. However, they require a pre-evacuation stage and have a slow startup time.3. Turbomolecular Pumps: These pumps use high-speed rotors to pump gases at very high vacuum levels. They are commonly used in research and high-tech applications.4. Cryogenic Pumps: Cryogenic pumps use liquid nitrogen or other cryogenic fluids to condense and remove gases, achieving very high vacuum levels.Methods of Vacuum Obtaining.There are several methods used to obtain a vacuum, depending on the application and the desired vacuum level.1. Coarse Vacuum: In this method, a mechanical pump is used to remove most of the air from the chamber. This creates a low-vacuum environment suitable for some applications.2. High Vacuum: For higher vacuum levels, additional pumps such as diffusion pumps or turbomolecular pumps are used. These pumps can achieve vacuum levels of 10^-4 to10^-7 torr.3. Ultra-High Vacuum: Ultra-high vacuum (UHV) levels are achieved using specialized pumps such as ion pumps or titanium sublimation pumps. These pumps can achieve vacuum levels of 10^-9 to 10^-12 torr, making them suitable for high-precision applications such as surface science and materials research.Applications of Vacuum Obtaining Technology.Vacuum obtaining technology has a wide range of applications across various industries and fields. Some common applications include:1. Electronics Manufacturing: Vacuum technology is crucial in electronics manufacturing, especially in the production of semiconductor devices and integrated circuits. Vacuum chambers are used to deposit thin films, etch surfaces, and perform other critical processes.2. Research and Development: Vacuum obtainingtechnology is widely used in research laboratories for experiments requiring high vacuum levels. This includes materials research, surface science, and quantum physics.3. Medical Applications: Vacuum pumps are used in medical applications such as suction devices, wound dressings, and some surgical procedures.4. Industrial Applications: Vacuum technology is also used in various industrial processes such as drying,coating, packaging, and more.Conclusion.Vacuum obtaining technology is a crucial field with applications spanning various industries and fields. It involves the use of vacuum pumps and other equipment to create and maintain low-pressure environments. With the continuous advancement of technology, vacuum obtaining technology will continue to evolve, enabling new applications and improving existing ones.。
LED照明常见词汇中英对照(销售)

LED照明常用词汇中英文对照专业照明 illumination防爆灯 explosion—proof lamp/light室内灯 residential lamp台灯 table desk lamp/light壁灯 wall lamp/light落地灯 floor lamp/light吸顶灯 ceiling lamp/light镜前灯 mirror front lamp/light户外灯 outdoor lamp路灯 street lamp/light庭院灯 garden lamp/light草坪灯 lawn lamp/light防水灯 waterproof /under water lamp应急灯 emergency light工具灯 utility light浴室灯 bathroom light灯饰附件 lighting accessories灯饰配件 light fittings灯泡 bulb白炽灯泡 incandescent light bulbs开关 switch光源 light source节能灯 energy saving lamp荧光灯 fluorescent light/lamp荧光灯管 linear fluorescent light tube 环形荧光灯fluorescent circular lamp 发光二级管LED三极管 audion/dynatron灯杯 lamp cup灯罩 lamp shade/cover灯头/灯座 lamp holder灯头/灯座 lamp base灯头型号base’s type灯盘 lamp house灯盘 lamp plate/metal pan灯柱 lamp pole压克力配件acrylic fitting塑胶配件 plastic fitting五金配件 hardware fitting玻璃配件 glass fitting压铸件 die—casting fitting电线 electric wire/power cored插头 Pin/plug插座 socket螺丝 screw螺母 nut十字螺丝philip’s head screw 扁头螺丝 flat head screw方螺帽 square nut螺栓杆 bolt bar螺栓盖 bolt cover金属面板 metal surface面板 bezel panel底板 back plane镇流器 ballast电子镇流器electronic ballast 感应镇流器inductive ballast 适配器 adapter变压器 transformer调节器 adjustment连接器 connector调光器 dimmer接线端子 terminal接线盒 connection box电池 battery光电池 photocell备用电池 emergency battery 保险丝 fuse调光器 dimmer传感器 sensor电线 electric wire电镀 plating抛光 finish/polish铬 chrome镍 nickel铁 iron钢 steel铝 aluminum银 silver黄铜 brass不锈钢 stainless steel古铜色 antique brass抛光铜色 polish brass图纸 drawing电路图 circuit diagram玻璃备品 glass spare part防水 waterproof防尘 dustproof落下测试 drop test电器测试 electric test老化测试 aging test壁盘 back plate / disk配件 component绝缘 insulation斑点 spots刮痕 scratch验货 inspection对接 butt joint对接焊接 butt weld光色 light color瓦特 watt电压(伏特数)voltage光强度 luminous intensity, I光强度单位:坎德拉 candela, cd 照度 Illuminance, E照度单位:勒克斯 Lux, lx辉度 Luminance, L光通量 Luminous flux,ф色温 color temperature(CCT)三基色 tri—phosphor三基色稀土荧光粉 tri—phosphor Fluorescent Powder 三基色灯管 tri-phosphor tube light三基色发光二极管 tri-phosphor有功:active power无功:reactive power电流:current容量:capacity电压:voltage档位:tap position有功损耗:reactive loss无功损耗:active loss功率因数:power-factor功率:power功角:power—angle电压等级:voltage grade空载损耗:no-load loss铁损:iron loss铜损:copper loss空载电流:no—load current阻抗:impedance正序阻抗:positive sequence impedance 负序阻抗:negative sequence impedance 零序阻抗:zero sequence impedance电阻:resistor电抗:reactance电导:conductance电纳:susceptance无功负载:reactive load 或者QLoad有功负载:active load PLoad遥测:YC(telemetering)遥信:YX励磁电流(转子电流):magnetizing current 定子:stator功角:power—angle上限:upper limit下限:lower limit并列的:apposable高压:high voltage低压:low voltage中压:middle voltage电力系统power system发电机generator励磁excitation励磁器excitor电压voltage电流current母线bus变压器transformer升压变压器step—up transformer高压侧high side输电系统power transmission system输电线transmission line固定串联电容补偿fixed series capacitor compensation 稳定stability电压稳定voltage stability功角稳定angle stability暂态稳定transient stability电厂power plant能量输送power transfer交流AC装机容量installed capacity电网power system落点drop point开关站switch station双回同杆并架double-circuit lines on the same tower 变电站transformer substation补偿度degree of compensation高抗high voltage shunt reactor无功补偿reactive power compensation故障fault调节regulation裕度margin三相故障three phase fault故障切除时间fault clearing time极限切除时间critical clearing time切机generator triping高顶值high limited value强行励磁reinforced excitation线路补偿器LDC(line drop compensation)机端generator terminal静态static (state)动态dynamic (state)单机无穷大系统one machine - infinity bus system 机端电压控制AVR电抗reactance电阻resistance功角power angle有功(功率) active power无功(功率)reactive power功率因数power factor无功电流reactive current下降特性droop characteristics斜率slope额定rating变比ratio参考值reference value电压互感器PT分接头tap下降率droop rate仿真分析simulation analysis传递函数transfer function框图block diagram受端receive—side裕度margin同步synchronization失去同步loss of synchronization 阻尼damping摇摆swing保护断路器circuit breaker电阻:resistance电抗:reactance阻抗:impedance电导:conductance电纳:susceptance导纳:admittance电感:inductance电容: capacitanceProduct power:产品功率Power factor :功率因数Luminous flux :光通量Light effect :发光效率Color temperature Base:色温基准工作环境温度:Working temperature工作电压:Supply voltage额定电源频率Rated power frequency额定功率Rated power 驱动电源效率Power supply efficiency 功率因数Power-factor(PF)LED发光效率LED luminous efficiency灯具初始光通量Luminous flux灯具出光效率 Lamp Flux色温Color temperature显色指数CRI: Ra防护等级IP rating:使用寿命 Working life /Life Span外壳材质Shell material character照明专业术语(英汉对照)ambipolar diffusion\[物]双极扩散arc discharge\电弧放电, 弧光放电avalanche\n.雪崩\v。
最新高考英语高中必备英语阅读理解(科普环保)技巧全解及练习题(含答案)
最新高考英语高中必备英语阅读理解(科普环保)技巧全解及练习题(含答案)一、高中英语阅读理解科普环保类1.犇犇Choose the one that fits best according to the information given in the passage you have just read.While faking and fierce looks are among animals great defenses, many species know that everyone runs from a big stink (臭气) too.Vulture (秃鸳)Vultures, are street sweepers that feast on the rotting flesh of dead animals, which benefits us by ridding our highways and landscapes of animal bodies and the bacteria they might carry. When vultures feel threatened they vomit, and the smell of vomited-on dead bodies puts of most predators. Throwing up allows the vulture to fly away more quickly-and the vomit can hurt the aggressor's eyes and face.Opossum (负鼠)In some ways opossums have it easy. In order to become "dead", they don't have to fax anyone a death certificate. They just lie there with their tongues hanging out with the smell of dead flesh, sometimes for hours, effectively convincing potential predators they can find a much fresher meal elsewhere. Even if they keep getting attacked, they won't move any more than a human statue until the threat has passed.Hoatzin (磨雉)Hold your nose and meet the hoatzin, a bird of distinctions, not the least of which is that it smells like fresh cow shit. The animal mostly eats leaves and it's the only bird known to digest by fermentation, like a cow. This process is what causes its smell and has earned it the nickname the "stink birdMillipedes (千足虫)Millipedes are tricky. For starters they look wormy. Their name is deceptive, too: Their legs number about 750. Their major defense is to curl up into a ball. They, though, also release a harm eyes, and leave a horrible smell on their attackers.Sea Hare (海兔)The graceful sea hare is plain in taste in the first place, so it's not the most popular dish in the seafood chain. Nonetheless this type of sea creature has a pretty creative smell-related defense that is almost the opposite of its smelly companions on this list. The sea hare gives out a slimy, purple ink, the substance which makes food less palatable to predators.Researchers using lobsters (2-f) as model predators found that the sea blocks the lobsters receptive mechanism. In other words, the sea hare gives its attacker the equivalent of a stuffy nose so they don't know how appealing it is.(1)The sea hare defends itself from predators by ________.A. becoming plain in taste at the discovery of a predatorB. giving out purple ink to make itself invisible to predatorsC. releasing substance to make predators unable to smell itD. giving off smelly gas to try to drive predators away(2)Which of the following statements is TRUE according to the passage?A. The vulture carries bacteria so that predators dare not get close to it.B. The opossum fakes its death to avoid being targeted by predators.C. The hoatzin eats cow shit so that it is nick-named as "stink bird".D. The gas released by millipede was basically harmless.(3)The species that enjoys more than one defense mechanism is ________.A. vultureB. opossumC. millipedeD. sea hare【答案】(1)C(2)B(3)C【解析】【分析】本文是一篇说明文,介绍了一些野生动物是如何进行自身防御的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
hep-ph/9607487 July 30, 1996 Revised September 4, 1996
arXiv:hep-ph/9607487v2 4 Sep 1996
Vacuum Instability in Low-Energy Supersymmetry Breaking Models
Байду номын сангаас1 2
e-mail address: dgupta@ e-mail address: dobrescu@ 3 e-mail address: lisa@
1
Introduction
Dynamical supersymmetry breaking (DSB) offers a natural explanation for the hierarchy between the electroweak scale and the Planck scale. In this context, the “DSB sector” contains the gauge interactions responsible for supersymmetry breaking and the chiral superfields charged under this group, while the visible sector includes the supersymmetric standard model. There are several known models which break supersymmetry dynamically [1, 2, 3, 4], and can be used as the DSB sector. But a model of supersymmetry breaking is not sufficient; the supersymmetry breaking must be communicated to the visible sector. At present, there are two scenarios. Supersymmetry breaking can be transmitted from the DSB sector to the visible sector either by supergravity or by gauge interactions. The latter scenario has the virtue of ensuring a natural suppression of flavorchanging neutral currents [5]. Also, if supersymmetry breaking is gauge mediated, the soft breaking parameters are potentially determined in terms of a few coupling constants. However, it is difficult to make a phenomenologically successful model of this type. It is essential to give the gauginos a mass. Current models [2, 6] do so by first breaking supersymmetry in one sector, then generating a VEV for the F component of a singlet field, coupling this singlet field to messenger quarks, leading to a one loop gluino mass of order of the electroweak scale. This is not very economical, and ideally, one would like to construct a model in which the communication of supersymmetry breaking is more direct. However, constructing more directly connected models can prove to be difficult. Were one to try to introduce the messenger quarks into the DSB sector, asymptotic freedom would typically be lost [1]. One could try to eliminate the scalar in favor of a fermion bilinear but that seems not to fit well into models of DSB so far constructed [7]. One might introduce the singlet directly into the DSB sector [4, 8]. But it is not clear that even a locally stable minimum can be constructed which breaks supersymmetry and preserves color. The phenomenology of gauge mediated supersymmetry breaking is the subject of several recent studies [9]. In this paper, we explore another question, namely the stability of phenomenologically successful minima. Our results regarding the properties of the global minima in the simplest known models of this type are presented in the next section. In section 3 we consider the possibility that we live in the false vacuum. More complicated models are discussed in section 4. A summary can be found in section 5.
1
2
The Vacua of the Messenger Sector
In the existing models of gauge mediated supersymmetry breaking there is a sector which breaks supersymmetry dynamically at a scale Λs ∼ 102 − 104 TeV. This DSB sector has a global symmetry Gm which is weakly gauged so that it may be considered a small perturbation to the DSB mechanism. Supersymmetry breaking is transmitted from the DSB sector to the visible sector through a “messenger sector”, which consists of a gauge singlet, S , a pair of messenger quarks, q and q ¯, in the 3 and ¯ 3 of the color SU(3)C group, and a pair of chiral superfields, N and P , in vector-like representations of Gm . If there is a (Gm )3 anomaly in the DSB sector, the messenger sector should also include other superfields, Ei , to cancel the anomaly. The superpotential of the messenger sector includes the most general dimension-3 operators: λ Wmes = κS q ¯q + S 3 + λ1 P NS + W1 (P, N, Ei) . 3 (2.1)
The P NS term communicates supersymmetry breaking from the fields charged under the messenger group to the gauge singlet, and the S q ¯q term links the gauge singlet with the messenger quarks. Couplings of P and N to the other charged chiral superfields are contained in W1 . A discrete or R symmetry is required to forbid linear or quadratic terms in S and a q ¯q term, which otherwise would have coefficients of order the Planck scale. We choose a phase definition of the fields such that the coupling constants, κ, λ, λ1 , are positive. We focus on the case Gm ≡ U(1). Let g be the U(1) gauge coupling in the normalization where P , N and Ei have charges +1, −1 and yi , respectively. Upon integrating out the DSB sector, the only presence of supersymmetry breaking in the messenger sector is through an effective potential for the charged scalars [6]: