ABB Bushings_General C
ARTISAN

390National Instruments • Tel: (800) 433-3488•Fax: (512) 683-9300•***********•C o u n t e r /T i m e r A c c e s s o r i e s a n d C a b l e sD a t a A c q u i s i t i o n a n d S i g n a l C o n d i t i o n i n gAccessory and Cable Selection ProcessStep 1.Select your counter/timer device from Tables 1 and 2.Step ing Tables 1 and 2 as a guide,determine which accessories are appropriate for that device.Select an accessory using Table 3 as reference.Step ing Tables 1 and 2,determine the appropriate cable solution for your selected counter/timer device and accessory.AccessoriesBNC-2121 (See Figure 1)Connector block with BNC and spring terminal connections for easy connection of I/O signals to counter/timer devices.The BNC-2121 offers spring terminals,as well as eight dedicated and six user-defined BNC connectors,which provide access to all I/O signals.This connector block is also a full-featured test accessory that provides pulse-train,trigger,and quadrature encoder signals.For the connections,refer to the BNC-2121 user guide at /manualsBNC-2121......................................................................................................778289-01Dimensions – 26.7 by 11.2 by 5.5 cm (8.0 by 4.4 by 2.2 in.)CA-1000 (See Figure 2)Configurable signal connectivity solution for connecting counter/timers to different types of standard I/O connectors.You can also incorporate switches and LED indicators.You can place the CA-1000 under a laptop PC,on a benchtop,or in a 19 in.rack.CA-1000......................................................................................................See page 351Dimensions – 30.7 by 25.4 by 4.3 cm (12.1 by 10 by 1.7 in.)Counter/Timer Accessories and CablesFigure 2. CA-1000 Configurable Signal Conditioning SolutionFigure 1. BNC-2121 Connector BlockAccessory DescriptionPage BNC-2121BNC connector block with built-in test features390CA-1000Configurable connector accessory 390SCB-68Shielded screw connector block 391TB-2715Front-mount terminal block for PXI-660x391TBX-68DIN-rail connector block 391CB-68LP Low-cost screw connector block 391CB-68LPR Low-cost screw connector block 391Table 1. Accessories and Cables for PXI-6601 and PCI-6602Table 2. Accessories and Cables for PXI-6602 and PXI-6608Table 3. Overview of AccessoriesPCI-6601, PCI-6602AccessoriesCables BNC-2121, CA-1000, SCB-68,–TBX-68, CB-68LP , and CB-68LPR R6868 or SH68-68-D1TB-2715N/APXI-6602, PXI-6608AccessoriesCables BNC-2121, CA-1000, SCB-68,–TBX-68, CB-68LP , and CB-68LPR R6868 or SH68-68-D1TB-2715Connects directly to the deviceCounter/Timer Accessories and CablesSCB-68 Shielded I/O Connector Block (See Figure 3)Shielded I/O connector block for easy connection of I/O signals to the counter/timer devices.T he screw terminals are housed in a metal enclosure for protection from noise bined with a shielded cable,the SCB-68 provides rugged,very low-noise signal termination.T he SCB-68 also includes two general-purpose breadboard areas.SCB-68..............................................................................................................776844-01Dimensions – 19.5 by 15.2 by 4.5 cm (7.7 by 6.0 by 1.8 in)TB-2715 Terminal Block (See Figure 4)With the T B-2715 terminal block for PXI counter/timer devices,you can connect signals directly without additional cables.Screw terminals provide easy connection of I/O signals.The TB-2715 latches to the front of your PXI module with locking screws and provides strain relief.TB-2715............................................................................................................778242-01Dimensions – 8.43 by 10.41 by 2.03 cm (3.32 by 4.1 by 0.8 in.)TBX-68 I/O Connector Block with DIN-Rail Mounting (See Figure 5)Termination accessory with 68 screw terminals for easy connection of field I/O signals to the counter/timer devices.The TBX-68 is mounted in a protective plastic base with hardware for mounting on a standard DIN rail.TBX-68..............................................................................................................777141-01Dimensions – 12.50 by 10.74 cm (4.92 by 4.23 in.)CB-68LP and CB-68LPR I/O Connector Blocks (See Figure 6)Low-cost termination accessories with 68 screw terminals for easy connection of field I/O signals to the counter/timer devices.The connector blocks include standoffs for use on a desktop or mounting in a custom panel.T he CB-68LP has a vertically mounted 68-pin connector.The CB-68LPR has a right-angle mounted connector for use with with the CA-1000.CB-68LP............................................................................................................777145-01Dimensions – 14.35 by 10.74 cm (5.65 by 4.23 in.)CB-68LPR ........................................................................................................777145-02Dimensions – 7.62 by 16.19 cm (3.00 by 6.36 in.)391National Instruments • Tel: (800) 433-3488•Fax: (512) 683-9300•***********•Counter/Timer Accessories and CablesData Acquisition andSignal ConditioningFigure 6. CB-68LP and CB-68LPR I/O Connector BlocksFigure 5. TBX-68 I/O Connector BlockFigure 4. TB-2715 I/O Terminal BlockFigure 3. SCB-68 Shielded I/O Connector Block392National Instruments • Tel: (800) 433-3488•Fax: (512) 683-9300•***********•C o u n t e r /T i m e r A c c e s s o r i e s a n d C a b l e sD a t a A c q u i s i t i o n a n d S i g n a l C o n d i t i o n i n gCablesRTSI Bus Cables (See Figures 7 and 8)Use RT SI bus cables to connect timing and synchronization signals among measurement,vision,motion,and CAN boards for PCI.For systems using long and short boards,order the extended RTSI cable.2 boards ..........................................................................................................776249-023 boards ..........................................................................................................776249-034 boards ..........................................................................................................776249-045 boards ..........................................................................................................776249-05Extended,5 boards ........................................................................................777562-05SH68-68-D1 Shielded Cable (See Figure 9)Shielded 68-conductor cable terminated with two 68-pin female 0.050 series D-type connectors.This cable connects counter/timer devices to accessories.1 m..................................................................................................................183432-012 m..................................................................................................................183432-02R6868 Ribbon I/O Cable (See Figure 10)68-conductor flat ribbon cable terminated with two 68-pin e this cable to connect the NI PCI-6601 to an accessory.For signal integrity with high-frequency signals,use the SH68-68-D1 with the NI 6602 and NI 6608.1 m..................................................................................................................182482-01Custom Connectivity Components68-Pin Custom Cable Connector/Backshell Kit (See Figure 11)68-pin female mating custom cable kit for use in making custom 68-conductor cables.Solder-cup contacts are available for soldering of cable wires to the connector.68-pin custom cable kit ................................................................................776832-01PCB Mounting ConnectorsPrinted circuit board (PCB) connectors for use in building custom accessories that connect to 68-conductor shielded and ribbon cables.Two connectors are available,one for right-angle and one for vertical mounting onto a PCB.68-pin,male,right-angle mounting..............................................................777600-0168-pin,male,vertical mounting....................................................................777601-01Counter/Timer Accessories and CablesFigure 10. R6868 Ribbon I/O CableFigure 9. SH68-68-D1 Shielded CableFigure 8. Extended RTSI Bus CableFigure 7. RTSI Bus CableFigure 11. 68-Pin Custom Cable Kit。
ABB 产品信息说明书
To carry the ‘Industrial IT Enabled’ sym-bol, all current and new ABB products are tested and certified at one of four levels. The lowest level (level 0) speci-fies a base set of information available for every Industrial IT product or appli-cation, and the higher levels define capabilities that allow interaction with other products or in system configura-tions. Today, more than 36,000 ABB products are at least level 0 certified. To become what is officially known as Industrial IT Level 0: Information Enabled, a product must have the following characteristics or Aspects: Product identificationProduct documentation:1.Product data sheet or technicalreference manual2.Installation and commissioningmanual3.Application manual4.Operating manual5.Maintenance and service manual6.Declaration of conformity regard-ing CE marking7.Environmental product declaration8.Environmental informationCAD dataTechnical data and product classifica-tionAll this product information is collectedand stored in one file as an AspectFrame Work (AFW) file. The .afw exten-sion denotes a proprietary file formatthat is designed to encapsulate AspectObjects1)for use in distributing productinformation (Level 0 Enabled products).The above-mentioned Aspects andAspect Objects are used by ABB tomodel all information about productsand processes. The Aspect Objects arecreated, changed and displayed using acommon ABB architecture called theAspect Integrator Platform, or AIP.However, many potential customers oflevel 0 Industrial IT certified productsdo not have AIP already installed andwould not be able to access the AFWfile. A small, easy-to-use tool was there-fore required – the Industrial IT equiva-lent of the Acrobat Reader – that wouldallow viewing and navigation of AFWfiles without the need to install AIP. Inaddition, it should serve as an impor-tant marketing tool and appetizer forABB’s Aspect Object platform.Scientists from ABB’s Polish and Ger-man research centers, together withIndustrial IT experts in Sweden, devel-oped an Aspect Object Viewer (AOV)in response to this need. This verycompact (approximately 8-MB) applica-tion is smaller than the Acrobat Readerprogram and permits viewing of AFWfiles using navigation methods verysimilar to the plant explorer, but oper-ates fully independent of AIP software.Under the name Inform IT Aspect ObjectViewer, the project was completed insix months and version 1 was releasedfor external distribution in January2003. An upgraded version 2.1 wasreleased in September with the follow-ing new features:Support for bookmark AspectFile association – assumes AOV asthe default application for viewingAFW filesAutomatic upgrade – automaticallyremoves the previous version of AOVDescriptive error messages – formore understandable messages whensomething goes wrongSearch function – for searching forobject propertiesTwo ABB businesses are already usingAOV. The low voltage business hasproduced a CD cataloging its circuit-breakers, electrical relays and controlproducts. Each CD now contains AOVto allow viewing of product informa-tion. Since the middle of 2003, thepower transformer business has madeAOV available to customers as part ofthe Aspect Object information distrib-uted with products certified to Level 0.Inform IT Aspect Object Viewer –the Industrial ITequivalent of Adobe AcrobatMarkus GreinerCorporate ResearchABB Switzerland*********************.com 1)The Industrial IT concept defines the collection of information required to support each plant component as an Aspect Object TM– containing all the characteristics – or Aspects of the device.An ABB collaboration has resulted in an improved programming method that not only speeds up the programming of robot automation tasks, but also opens up areas for automation that are presently inaccessible due to traditional programming being too complex and taking too long in relation to production time.ABB robots have to be extremely versa-tile. Used across almost the whole of in-dustry for tasks ranging from automated assembly and materials handling to arc-welding, every extra ounce of versatility added to them can significantly increase their range of application. As a robot is essentially a moving object, spatial in-formation has to be conveyed accurately and reliably to it. Adding flexibility therefore makes traditional program-ming more complex and time-consum-ing. The advantages to be gained fromfinding new, alternative methods of re-laying information fast (and accurately)to the robot make this field of researchas challenging as it is interesting.With robots playing an ever more im-portant role in our everyday lives, theidea that humans should be able tocommunicate with them using methodsas close as possible to those they use tocommunicate with each other is gainingmomentum. Communication amonghumans is multi-modal (ie, a combina-tion of gesture and speech) and oftenintuitive, and institutions like CarnegieMellon University (CMU) have used thisidea to increase human-machine inter-action. As a world leader in industrialrobot technology, ABB is benefitingfrom this experience by working to-gether with the Advanced MechatronicsLaboratory at CMU on a project whichuses the idea of the human arm andhand gestures as a natural way toconvey spatial information – in otherwords, gesture-based programming.ABB’s approach is backed up by Pro-fessor Pradeep Khosla, head of the AMLand Electrical and Computer Engineer-ing Department at CMU when he says,“As robots enter the human environ-ment and come into contact with inex-perienced users, they need to be ableto interact with the users in an intuitiveway. The keyboard and mouse are nolonger acceptable as the only meansof input.”Gesture-based programmingin a nutshellCMU has been working in the area ofgesture-based programming (GBP) formany years now. The goal of GBP is toprovide a more natural environmentfor the user, and to generate morecomplete and successful programs byfocusing on task experts rather thanprogramming experts.The process begins with a persondemonstrating the task to be pro-grammed. The person’s hand and fin-gertips are observed through a sen-sorized glove with special tactilefingertips. The modular glove systemsenses hand pose, finger joint anglesand fingertip contact conditions.Objects in the environment are sensedwith computer vision while a speechrecognition system extracts high-levelcontrol information. Primitive gestureclasses are extracted from the raw sen-sor information and passed to a gestureinterpretation network. The system isself-adaptive in the sense that knowl-edge of previously acquired skillsretained by the system is used to inter-pret the gestures during training, withcontrol feedback provided during run-time. The output of the GBP system isthe executable program for performingThe ‘human touch’ –advanced robot programmingR&D digest the demonstrated task on the targethardware.What it means for ABBSince robotic arc welding is inherentlythree-dimensional, hand gestureswould be an intuitive tool for provid-ing parameters such as position, veloci-ty, acceleration, size, direction, angleand angular velocity to enable fasterand accurate programming of the ro-bot. Speech would also play an impor-tant part in enhancing this system byproviding high-level control informa-tion. Therefore, CMU scientists togetherwith ABB experts have developed andevaluated a programming system witha multi-modal interface for robotic andarc-welding applications.The system has the following main com-ponents:Cyberglove to measure the positionand movement of the fingers andwrist (gesture sensing)Polhemus Fastrak 6-DOF sensors for position sensingMicrosoft speech recognition system PCWebWare for robot-PC communications ABB robotThe PC mediates between the multi-modal input devices (glove and speech) and the ABB robot. On the input side it runs software that translates raw voice and glove inputs into robot controller commands. On the output side it sends commands to the robot that contain cor-rect position and orientation information based on the appropriate coordinate transformations.The robot is programmed in three modes: absolute, jogging and slave. In absolute mode, ‘waypoints’ are pro-grammed by pointing to and storing various positions in space with the in-dex finger. However, due to the limited accuracy of the positioning system (+/– 5 cm), the stored positions have to be adjusted to meet the required accu-racy (< 1mm) for arc-welding. Theseadjustments can be performed by either‘jogging’ or ‘slaving’. Jogging, as it isused in robotics, means controlling theend effector (a device or tool connect-ed to the end of the robot arm) directlyusing either a joystick or push buttons.In this case the joystick and pushbut-tons are replaced by gestures and voicecommands. For example, the ‘jog’ com-mand makes the robot move a certaindistance in the direction of the indexfinger. In slave mode, the robot mimicsthe motion of the hand using an ad-justable scaling factor. This means thatif the human hand moves a distance of1 cm, the robot responds by moving1 mm (depending on the scale settings)and so on until the desired accuracyhas been reachedThe system has been tested and evaluat-ed in a real arc-welding environmentusing ABB’s IRB140 and IRB1400 robots.The programming system has so farproved capable of producing the neces-sary accuracy, allowing high-qualitywelds to be produced. In addition, ob-servations from the evaluation indicatethat it is a very easy method to learnand master.The joint collaboration between engi-neers at CMU and ABB experts has, inaddition to generating valuable results,built up extensive know-how which willbe used within ABB for further researchin the field of robot programming.Dr. John DolanThe Robotics InstituteCarnegie Mellon University**********.eduMartin StrandAdvanced Industrial Communication GroupABB Corporate ResearchVästerås/Sweden********************.comR&D digestA simulation system that makes use of state-of-the-art web technology is used to train Novolen ®gas-phase polypropy-lene process plant operators on a rigor-ous dynamic plant model via Internet,Intranet, or as a stand-alone system.Simulation-based education is themethod preferred by many companies today for providing ‘on the job’ training.As computational capabilities become ever faster and improved tools appear on the market, computer-based educa-tional services, particularly in the chemi-cal process industries, are expanding.These services can mimic true plant operation through computer simulation,thus providing a safe and efficientmethod of training plant operators and other production personnel. In addition,operators may be trained to handle normal and abnormal plant operating conditions without endangering the actual plant [1].ABB Corporate Research has developed a simulation-based process-learning tool for polypropylene plants. Together with Novolen Technology Holdings C.V.(NTH), a joint venture of ABB LummusGlobal and Equistar, ABB has developed a learning tool aimed at the Novolen process owned by NTH. Called Novolen Operator Training Simulation (Novolen OTS), the tool’s strengths lie in its unique model, the robustness of the software and simulator, and its ease of maintenance and extendability. Because plants using the Novolen process are located around the world, using a web-enabled tool is particularly appropriate.Novolen OTS based training is possible over the Internet, Intranet, or on a stand-alone computer.The targeted users are Novolen process plant operators, operator trainers, and process engineers. A major training ob-jective is that the operators learn the dy-namic characteristics of the plant during standard operation and in abnormal sit-uations, including process disturbances,start-up/shutdown of the plant, and transitions between different product grades. Moreover, they obtain an under-standing of the relationship between operating conditions and resulting prod-uct quality. This permits operators to improve their ability to operate plants and to diagnose problems.The Novolen process plantIn the Novolen ®process, polymerization is conducted in one or two gas-phase reactors. Only two reactors connected in series are needed to produce a wide range of products, including super-high impact copolymers. In addition to the reactors, components in the plant in-clude condensers, degassing vessels,product silos, an extruder, controllers,and emergency valves .OTS component overviewThe main components of the Novolen ®OTS system include:1 A simulator, which includes a model of the process, the control system and the safety interlocksA generic operator station as a human system interfaceA software framework, which inte-grates these main components and provides for simulation services over the Internet.The graphical user interface (GUI) is a generic representation of an operator station . As the Novolen ® OTS is used in self-paced mode, no instructor station is required. A standard web browser,such as Internet Explorer, represents the GUI, displaying simulation results aswell as allowing user input.The components in the user interface,such as valves, numeric text boxes,buttons, level indicators, and flares,reflect the current status of the simula-tion. When necessary, the components are used to change the course of the simulation. For instance, valves areclosed/opened by clicking on them, and specific numbers are entered using the numeric text boxes. The condensers,degassing vessels, product silos, extrud-er, controllers, and emergency valves are all represented in the tool.Besides the above-mentioned basic functionality, additional functions are implemented for an enhanced learning experience. For example, the speed of the simulation can be increased in order to use the tool more efficiently,or a snapshot of the current state can be taken and reused in later training sessions.A normal training session starts by navi-gating to the web site of the server.After a login procedure in which access rights are checked, a simulation is start-ed with one of several pre-configured scenarios. The trainee may then change the course of the simulation by chang-ing process parameters, such as flow rates or temperature set-points. These2A new web-based simulation tool for polymer plant operatorsR&D digestchanges result in a dynamic response,which the trainee observes and reacts to accordingly. Stopping the simulation and closing the web browser terminate the session.The Novolen ®OTS can be fully installed and run on a standard off-the-shelf PC.Alternatively, it can be run over theInter/intranet so that only a web browser is needed on the user’s side.TechnologyThe dynamic model is a first-principle based model of the Novolen ®process with major unit operations [2]. It is com-posed of ordinary differential equations and has about 100 states. A wide range of operating conditions was required because the process tool was designed in answer to a major training objective:to focus on the dynamic characteristics of the plant during standard operation (eg, transition between different poly-mer grades) and abnormal situations (eg, a blocked pipe).The model is parameterized to easily permit adjustments that reflect different plant sizes and configurations. Special attention has been given to the integrity of the numerical solution to avoid simu-lation crashes during training.The tool uses a client-server architecture where the simulation services are server based. The GUI is presented on the client’s computer. The interaction be-tween the client and the server takes place via HTTP, the most common com-munication protocol on the Internet.The screens within the tool are built as HTML pages with Java applets repre-senting the data. The HTML-based ap-proach makes it possible to flexibly link to other information sources, and enables integration with other e-learning systems. The use of Java makes it possi-ble to program a variety of specialized components, allowing the user to influ-ence the data in various ways. Despite this, all major browsers with Java capa-bilities can be used for server access.On the server side, a web server frame-work (consisting of a multi-layer archi-tecture) provides the functionalityneeded for dynamic data to flow to and from the web pages. Innermost is an OPC server, which encapsulates the model and provides a standard inter-face to its data. The web server creates an HTTP-based service where data can stream from the OPC to Java servlets.These servlets are connected via HTTP to the Java applets ‘living’ on the client side. ABB developed the internal OPC connectivity by using the Java Native Interface to bridge the gap between Windows 32 applications and Java [3].Value extensionWith Novolen ®OTS, NTH has extended the value proposition of its current tech-nology offering with the creation of a highly robust and extendable tool using standard software and modeling tech-nologies. This tool will enable current and future licensees of the Novolen process to improve the understanding and operation of their plants. Licensees will be able to choose between web-based or stand-alone training sessions.Initial feedback from users has been so positive that many feel such a tool will eventually become essential for any company in the chemical process indus-tries.Reference[1]A. Kroll: Trainingssimulation für die Prozessindustrien: Status, Trends und Ausblick. Teil 1+2. Automatisierungstechnische Praxis atp (2003) 45, no. 2, pp 50–57, and no. 3, pp 55–60.[2]C.-U. Schmidt, R. Böttcher: 2000. ProveT – Training simulator for Novolen Process. 1st European Conf on the Reaction Engineering of Polyolefins, 2000,Lyons, 114–116.[3]R. Nyström, et al: 2003. Web-based training for polymer plant operators using process simulation. Automatisierungstechnik 51, no. 11.Dr. Rasmus NyströmDr. Andreas Kroll Dr. Alexander FrickChristian StichABB Corporate Research CenterLadenburg, GermanyKlaus HüttenDr. Franz Langhauser Dr. Wilhelm Seebass Dr. Meinolf Kersting ABB Lummus GlobalNovolen Technology Division。
科技英语翻译___课后答案
科技英语翻译6.1 介词的一般译法第1节翻译练习1In general, man serves as the source of infection while animals act as such only occasionally.An industrial robot shares many attributes in common with a numerical control machine tool.一般来说,人可作为感染源,而动物只是偶然如此。
工业用机器人与数控机床有许多共同的特性。
第1节翻译练习2With non-changeover control both the boiler plant and the chiller plant operate to provide simultaneous heating and cooling throughout the year.The online service delivers substantially more value to our global audience of e-business professionals in the chemical, plastics and allied industries.This device can mimic photosynthesis to produce usable energy from sunlight.采用非转换控制,锅炉设备和制冷装置都在运行,全年可同时供暖和制冷。
该网络服务主要向全球从事化学、塑料及相关工业的专业电子商务用户提供更有价值的服务。
这种装置能够模拟光合作用,利用阳光产生可用的能源。
第1节翻译练习3The longitudinal axis of the turbine generator is perpendicular to the axis of the steam generator. In the right conditions, membranes are self-assembling.Winding of the spring induces residual stresses through bending.汽轮发电机的纵轴与锅炉轴线垂直。
汽车开发项目常用英语缩写对照
缩写中文解释3C3个关键零件(缸体、缸盖、曲轴)4 VDP四阶段的汽车发展过程A/D/V分析/发展/验证AA审批体系ABS防抱死制动系统ACD实际完成日期AI人工智能AIAG汽车工业产业群ALBS装配线平衡系统AP提前采购API先进的产品信息APM汽车加工模型APQP先进的产品质量计划AR拨款申请ARP拨款申请过程ARR建筑必要性检查ASA船运最初协议ASB船运第二个协议ASI建筑研究启动ASP船运标准协议ASR建筑选择审查B&U土建公用BCC品牌特征中心BEC基础设计内容BI开始冒气泡B-I-S最佳分节段BIW白车身BOD设计清单BOM原料清单BOP过程清单CAD计算机辅助设计CAE计算机辅助工程(软件)CAFÉ公司的平均燃油经济CAM计算机辅助制造CAMIP持续汽车市场信息项目CARE用户接受度审查和评估CAS概念可改变的选择CDD成分数据图CGS公司图形系统CI提出概念CIT隔间融合为组CKD完全拆缷CMM坐标测量仪CMOP结构管理工作计划CPP关键途径CPP关键途径CR&W 控制/机器人技术和焊接CRIT中心新产品展示执行组CS合同签订CTS零件技术规格D/EC设计工程学会DAP设计分析过程DCAR设计中心工作申请DDP决策讨论步骤DES设计中心DFA装配设计DFM装配设计DLT设计领导技术DMA经销商市场协会DMG模具管理小组DOE试验设计DOL冲模业务排行DQV设计质量验证DRE设计发布工程师DSC决策支持中心DVM三维变化管理DVT动态汽车实验E/M进化的EAR工程行为要求ECD计划完成日期EGM工程组经理ELPO电极底漆ENG工程技术、工程学EOA停止加速EPC&L工程生产控制和后勤EPL工程零件清单ETSD对外的技术说明图EWO工程工作次序FA最终认可FE功能评估FEDR功能评估部署报告FFF自由形态制造FIN金融的FMEA失效形式及结果分析FTP文件传送协议GA总装GD&T几何尺寸及精度GM通用汽车GME通用汽车欧洲GMIO通用汽车国际运作GMIQ通用汽车初始质量GMPTG通用汽车动力组GP通用程序GSB全球战略部HVAC加热、通风及空调I/P仪表板IC初始租约ICD界面控制文件IE工业工程IEMA国际出口市场分析ILRS间接劳动报告系统IO国际业务IPC国际产品中心IPTV每千辆车的故障率IQS初始质量调查IR事故报告ISP综合计划ITP综合培训方法ITSD内部技术规范图IUVA国际统一车辆审核KCC关键控制特性KCDS关键特性标识系统KO Meeting启动会议KPC关键产品特性LLPRLOI意向书M&E机器设备MDD成熟的数据图MFD金属预制件区MFG制造过程MIC市场信息中心MIE制造综合工程师MKT营销MLBS物化劳动平衡系统MMSTS制造重要子系统技术说明书MNG制造工程MPG试验场MPI主程序索引MPL主零件列表MPS原料计划系统MRD物料需求日期MRD物料需求时间MSDSMSE制造系统工程MSS市场分割规范MTBF平均故障时间MTS生产技术规范MVSS汽车发动机安全标准NAMA北美市场分析NAO北美业务NAOC NAO货柜运输NC用数字控制NGMBP新一代基于数学的方法NOA授权书NSB北美业务部OED组织和员工发展P.O采购订单PA生产结果PAA产品行动授权PAC绩效评估委员会PACE项目评估和控制条件PAD产品装配文件PARTS零件准备跟踪系统PC问题信息PCL生产控制和支持PDC证券发展中心PDM产品资料管理PDS产品说明系统PDT产品发展小组PED产品工程部PEP产品评估程序PER人员PET项目执行小组PGM项目管理PIMREP事故方案跟踪和解决过程PLP生产启动程序PMI加工建模一体化PMM项目制造经理PMR产品制造能要求PMT产品车管理小组POMS产品指令管理小组POP采购点PPAP生产零部件批准程序PPAP生产件批准程序PPH百分之PPM百万分之PR绩效评估PR采购需求PR/R问题报告和解决PSA潜在供应商评估PSC部长职务策略委员会PTO第一次试验PUR采购PVM可设计的汽车模型PVT生产汽车发展QAP质量评估过程QBC质量体系构建关系QC质量特性QFD质量功能配置QRD质量、可靠性和耐久力QS质量体系QUA质量RC评估特许RCD必须完成日期RFQ报价请求RFQ报价要求书RONA净资产评估RPO正式产品选项RQA程序安排质量评定RT&TM严格跟踪和全程管理SDC战略决策中心SF造型冻结SIU电子求和结束SL系统规划SMBP理论同步过程SMT系统管理小组SOP生产启动,正式生产SOR要求陈述SOR要求说明书SOW工作说明SPE表面及原型工程SPO配件组织SPT专一任务小组SQC供方质量控制SQIP供应商质量改进程序SSF开始系统供应SSLT子系统领导组SSTS技术参数子系统STO二级试验SUW标准工作单位TA 技术评估TAG定时分析组TBD下决定TCS牵引控制系统TDMF文本数据管理设备TIMS试验事件管理系统TIR试验事件报告TLA 技术转让协议TMIE总的制造综合工程TOE总的物主体验TSM贸易研究方法TVDE整车外型尺寸工程师TVIE整车综合工程师TWS轮胎和车轮系统UAW班组UCL统一的标准表UDR未经核对的资料发布UPC统一零件分级VAPIR汽车发展综合评审小组VASTD汽车数据标准时间数据VCD汽车首席设计师VCE汽车总工程师VCRI确认交叉引用索引VDP汽车发展过程VDPP汽车发展生产过程VDR核实数据发布VDS汽车描述概要VDT汽车发展组VDTO汽车发展技术工作VEC汽车工程中心VIE汽车综合工程师VIS汽车信息系统VLE总装线主管,平台工程师VLM汽车创办经理VMRR汽车制造必要条件评审VOC顾客的意见VOD设计意见VSAS汽车综合、分析和仿真VSE汽车系统工程师VTS汽车技术说明书WBBA全球基准和商业分析WOT压制广泛开放WWP全球采购PC项目启动CA方案批准PA项目批准ER工程发布PPV产品和工艺验证PP预试生产P试生产EP工程样车Descriptions3 Critical Parts(Cylinder-block, Cylinder-head, Crankshaft) Four Phase Vehicle Development ProcessAnalysis/Development/ValidationApprove ArchitectureAnti-lock Braking SystemActual Completion DateArtificial IntelligenceAutomotive Industry Action GroupAssembly Line Balance SystemAdvanced PurchasingAdvanced Product InformationAutomotive Process ModelAdvanced Product Quality PlanningAppropriation RequestAppropriation Request ProcessArchitectural Requirements ReviewAgreement to Ship AlphaAgreement to Ship BetaArchitecture Studies InitiationAgreement to Ship PrototypeArchitecture Selection ReviewBuilding & UtilityBrand Character CenterBase Engineered ContentBubble Up InitiationBest-In-SegmentBody In WhiteBill of DesignBill of MaterialBill of ProcessComputer-Aided DesignComputer-Aided EngineeringCorporate Average Fuel EconomyComputer-Aided ManufacturingContinuous Automotive Marketing Information Program Customer Acceptance Review and EvaluationConcept Alternative SelectionComponent Datum DrawingsCorporate Graphic SystemConcept InitiationCompartment Integration TeamComplete KnockdownCoordinate Measuring MachinesConfiguration Management Operating PlanCorporate Product PorefolioCritical Path PlanControls/Robotics & WeldingCenter Rollout Implementation Team Contract SigningComponent Technical SpecificationDesign and Engineering CouncilDesign Analysis ProcessDesign Center Action RequestDecision Dialog ProcessDesign CenterDesign for AssemblyDesign For ManufacturabilityDesign leader TechnicalDealer Market AssociationDie Management GroupDesign Of ExperimentsDie Operation Line-UpDesign Quality VerificationDesign Release EngineerDecision Support CenterDimensional Variation ManagementDynamic Vehicle TestEvolutionary/MajorEngineering Action RequestEstimated Completion DateEngineering Group ManagerElectrode position PrimerEngineeringEnd of AccelerationEngineering Production Cntrol &Logistics Engineering Parts ListExterior Technical Specification Drawing Engineering Work OrderFinal ApprovalFunctional EvaluationFunctional Evaluation Disposition Report Free Form FabricationFinancialFailure Mode and Effects AnalysisFile Transfer ProtocolGeneral AssemblyGeometric Dimensioning & Tolerancing General MotorsGeneral Motors EuropeGeneral Motors International Operations General Motors Initial QualityGeneral Motors Powertrain GroupGeneral ProcedureGlobal Strategy BoardHeating, Ventilation ,and Air ConditioningInstrument PanelInitiate CharterInterface Control DocumentIndustrial EngineeringInternational Export Market AnalysisIndirect Labor Reporting SystemInternational OperationsInternational Product CenterIncidents Per Thousand VehiclesInitial Quality SurveyIncident ReportIntegrated Scheduling ProjectIntegrated Training ProcessInterior Technical Specification DrawingInternational Uniform Vehicle AuditKey Control CharacteristicsKey Characteristics Designation SystemKick-off MeetingKey product CharacteristicLing Lead P ReleaseLetter of IntentMachine & EquipmentMaster Datum DrawingsMetal Fabrication DivisionManufacturing OperationsMarketing Information CenterManufacturing Integration EngineerMarketingMaterial Labor Balance SystemManufacturing Major Subsystem Technical Specifications Manufacturing EngineeringMilford Proving GroundMaster Process IndexMaster Parts ListMaterial Planning SystemMaterial Required DateMaterial Required DateMaterial Safery Data SheetsManufacturing System EngineerMarket Segment SpecificationMean Time Between FailuresManufacturing Technical SpecificationMotor Vehicle Safety StandardsNorth American Market AnalysisNorth American OperationsNAO ContainerizationNumerically ControlledNext Generation Math-Based ProcessNotice of AuthorizationNAO Strategy BoardOrganization and Employee DevelopmentPurchasing OrderProduction AchievementProduction Action AuthorizationPerformance Assessment CommitteeProgram Assessment and Control EnvironmentProduct Assembly DocumentPart Readiness Tracking SystemProblem CommunicationProduction Control and LogisticsPortfolio Development CenterProduct Data ManagementProduct Description SystemProduct Development TeamProduction Engineering DepartmentProduct Evaluation ProgramPersonnelProgram Execution TeamProgram ManagementProject Incident Monitoring and Resolution Process Production Launch ProcessProcess Modeling IntegrationProgram Manufacturing ManagerProduct Manufacturability RequirementsProduct Management TeamProduction Order Management SystemPoint of PurchaseProduction Part Approval ProcessProduction Parts Approval ProcessProblems Per HundredProblems Per MillionPerformance ReviewPurchase RequirementProblem Reporting and ResolutionPotential Supplier AssessmentPortfolio Strategy CouncilPrimary TryoutPurchasingProgrammable Vehicle ModelProduction Vehicle DevelopmentQuality Assessment ProcessQuality Build ConcernQuality CharacteristicQuality Function DeploymentQuality, Reliability,andDurabilityQuality SystemQualityReview CharterRequired Completion DateRequest For QuotationRequirement for QuotationReturn on Net AssetsRegular Production OptionRouting Quality AssessmentRigorous Tracking and Throughout Managment Strategic Decision CenterStyling FreezeSumming It All UpSystem LayoutsSynchronous Math-Based ProcessSystems Management TeamStart of ProductionStatement of RequirementsStatement of RequirementsStatement of WorkSurface and Prototype EngineeringService Parts OperationsSingle Point TeamStatistical Quality ControlSupplier Quality Improvement ProcessStart of System FillSubsystem Leadership TeamSubsystem Technical Specification Secondary TryoutStandard Unit of WorkTechnology AssessmentTiming Analysis GroupTo Be DeterminedTraction Control SystemText Data Management FacilityTest Incident Management SystemTest Incident ReportTechnology License AgreementTotal Manufacturing Integration Engineer Total Ownership ExperienceTrade Study MethodologyTotal Vehicle Dimensional EngineerTotal Vehicle Integration EngineerTire and Wheel SystemUnited Auto WorkersUniform Criteria ListUnverified Data ReleaseUniform Parts ClassificationVehicle & Progress Integration Review TeamVehicle Assembly Standard Time DataVehicle Chief DesignerVehicle Chief EngineerValidation Cross-Reference IndexVehicle Development ProcessVehicle Development Production Process Verified Data ReleaseVehicle Description SummaryVehicle Development TeamVehicle Development Technical Operations Vehicle Engineering CenterVehicle Integration EngineerVehicle Information SystemVehicle Line ExecutiveVehicle Launch ManagerVehicle and Manufacturing Requirements Review Voice of CustomerVoice of DesignVehicle Synthesis,Analysis,and Simulation Vehicle System EngineerVehicle Technical SpecificationWorldwide Benchmarking and Business Analysis Wide Open ThrottleWorldwide PurchasingProgram CommencementConcept ApprovalPrograme ApprovalEngineering ReleaseProduct & Process ValidationPre-PilotPilot。
IRB 4600-40-ABB机器人资料

1 Description
7
1.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.1.1 Introduction to Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.1.2 Different robot versions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Safety/Standards. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.2.1 Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.2.2 Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
模具验收检查清单-通用项

All sections are identified (Material, Detail number and hardness).所有部件都要进行标识(材料、部件号、硬度),且在其安装位置上也做相应标示。
G23
Scrap drops smoothly and slugs will not build up inside die or lay on bolster. Maximum scrap size is less thanmm wide Xmm across (mm across through front and rear).废料掉落顺畅且料豆不能落在模具内部或压机台面上;最大废料尺寸小于mm Xmm对角(废料坑mm)
G09
Minimummm clearance above all Fastening seats. Fastening is accessible from front and back.
压板槽上部空开至少mm;周圈空开至少mm。确保模具前后方向的锁付空间。
G10
4 Locator pin holes are visible in correct locations,mm(Front)mm(Rear) diameter withmm chamfer.
G05
Shut height ismm. Record actual measurements: DESIGN: ________mm ACTUAL: ________mm ;模具闭合高度mm.实际设计值:________mm,现场测量值:________mm
N/A
G06
Check the press C/L and the uniformity of the die C/L, Record the offset: X =mm , Y =mm. Confirm the die of unbalance loads is suit for press and specific solutions.检查压机C/L和模具C/L的一致性,偏心量:X=mm,Y=mm。在多工位联合安装中,确认模具存在的偏载是在压机正常工作的范围内,必要时需要制定相应的解决方案。
DanlyIEM-Pins-Bushings-Metric公制导柱导套

TRUSTED SOLUTIONS AND INNOVATIONPINS & BUSHINGS – METRIC CONTENTSGeneral Information1Plain & Ball Bearing Guide PostsPress Fit Guide Posts 2Demountable Guide Posts4Automotive Straight Guide Posts6Plain Bearing & Self-Lubricating BushingsAutomotive Demountable Self-Lubricating Guide Post Bushings 8Automotive Demountable Self-Lubricating PAD Bushings 9Automotive Demountable Self-Lubricating Bushings Clamps 10Lifter Pins13Demountable Plain Bearing Bushings(Extra Long, Standard and Short Shoulder Series)14Demountable Plain Bearing Low Profile Bushings 16Self-Lubricating Ejector Bushings17Ball Bearing ComponentsBall Bearing Cages18Ball Bearing Demountable Bushings 19Ball Bearing Straight Sleeve Bushings20Demountable Ball Bearing Stripper Bushings & Cages21Technical InformationMounting Accessories22Ball Bearing Selection Guide 23Bore Size Data30Clamping Specifications for Demountable Post & Bushings32General InformationAs the premier die set manufacturer, we offer a complete line of catalog die sets as well as custom complex and simple sets. For replace-ment parts and for those customers wanting to assemble their own sets, an extensive line of catalog guide posts and bushings in both plain bearing and ball bearing styles is available for immediate delivery.Our guide posts are available in press fit and demountable styles. Both the -82 and -83 posts can be used in a plain bearing or a ball bearing system. The NP line of guide posts fully meet NAAMS standards.Our plain bearing bushings are available in press fit and demountable styles and are equipped with figure 8 oil grooves and lubrication fittings.They are available in three profiles: standard,short and extra long shoulder to give optimum flexibility in die set design. The bushings are also available in steel, bronze-plated and self-lubricating materials and are ideally suited for running with metric posts.Demountable posts and bushings are tap fit into location and seat flush with the ground face of the punch holder or die shoe. They are held in place with toe clamps and screws which provide perfect alignment of the post and bushing with the bore perpendicular to the ground surface of the punch holder or shoe. The clamp and screws provide four times the holding power compared to pressed-in components, yet they can be easily removed and assembled thus simplifying die building and maintenance.The ball bearing system includes press fit and demountable guide posts, press fit sleeves and demountable bushings as well as ball cages.The ball bearing guide posts are manufactured from hardened steel to assure free rolling of balls and high wear resistance. Each post is drilled and tapped at the bottom for mounting of the ball cage washer assembly. This unique mounting method permits the ball cage, except when under pre-load, to freely rotate 360° around the guide post thus eliminating scoring or tracking of the guide post surface. The ball bearings are arranged in the cage in a spiral pattern which also minimizes tracking or grooving and assures uniform wear.Our demountable bushings and guide posts provide ease of assembly.Demountablebushings are secured to the punch holder with clamps and screws, proving four times the holding power of pressed-in bushings.Special equipment spins ball bearings in place, then our ball cages move on to rigid quality inspection.Specially-designed spiral patterns are drilled into our ball cages to controltracking and grooving.These press fit guide posts are designed to run in both a plain and ball bearing systems. They are manufactured from high quality hardened steel and finish ground for a high precision finish. The diameters that are used in ball bearing applications are drilled and tapped on the working end for the mounting of the ball cage washer assembly. This unique mounting method permits the ball cage, except when under preload, to freely rotate 360 degrees around the guide post, thus eliminating scoring or tracking of the guide post surface.Product Features5-1820-82NOTES:♦Press fit length should be equal toor greater than the diameter of the guide post.♦See pages 30–31 for die set boringspecifications.♦Ball Cage washer assembly soldseparately and dependent on Type I, II or III assembly methods. Refer to page 22 for washer assembly part numbers.♦The diameters that are used in ballbearing applications are drilled and tapped on the working end for the mounting of the ball cage washer assembly.These demountable guide posts are designed to run in both plain and ball bearing systems. They are manufactured from high quality hardened steel and finish ground for a high precision finish. The diameters that are used in ball bearing applications are drilled and tapped on the working end for the mounting of the ball cage washer assembly. This unique mounting method permits the ball cage, except when under preload, to freely rotate 360 degrees around the guide post, thus eliminating scoring or tracking of the guide post surface.There are two ways of mounting the demountable posts into the die set: they can be either held in place with toe clamps and screws or they can be mounted using a retainer plug. Either mounting option offers the benefit of easy removal, even multiple times withoutdamaging or distorting the mounting holes in the die set, thus simplifying die building and maintenance. Demountable posts are also used to replace press fit posts when the press fit hole has been damaged and the straight pin no longer fits securely in the hole.5-2511-83Product FeaturesNOTES:♦All demountable guide posts are supplied with mounting clamps and screws. See pages 32–33 for clamping dimensions or to order additional toe clamps or mounting screws.♦Ball Cage washer assembly sold separately and dependent on Type 1, 2 or 3 assembly methods. Refer to page 22 for washer assembly part numbers.♦Retainer plugs must be ordered separately. Refer to page 32 for part numbers and dimensional information.♦The diameters that are used in ball bearing applications are drilled and tapped on the working end for the mounting of the ball cage washer assembly.NAAMS guide posts are manufactured in accordance with the North American Automotive Metric Standards. They are manufactured from high quality hardened steel and finish ground for a high precision finish. Hardness is RC 57-62 with a minimum depth of 0.8 min. These posts are ideally suited for the self-lubricating NAAMS bushings.T o reduce tooling weight, the 100mm and 125mm diameter posts,NPH series, are manufactured with a through hole.Product FeaturesFor NP Series (Solid Posts)For NPH Series (Hollow Posts)NPH100315CLAMP NOTES:♦See pages 10–12 for clamp part numbers and dimensional information.♦OUR bushings will be supplied with (3) M8 toe clamps and screws (#6-99-1).♦NAAMS bushings will be supplied with (3) M8 toe clamps and screws (#6-99-1).♦GM bushings are supplied with NO clamps and screws. Order separately:for 25-50mm, order (1) 90.20.60A clamp per bushing; for 63-125mm,order (2) 90.20.60B clamps per bushing.♦CHRYSLER guide post bushings are supplied with NO clamps or screws.Order STOP/BUSHING CLAMP COMBINATION BLOCK separately. See Table 1 for sizes and part numbers.♦Ford bushings: 32-50mm are supplied with (1) toe clamp (#MMC0219);63mm-100mm are supplied with (2) toe clamps (#MMC0219).Automotive DemountableSelf-Lubricating Guide Post BushingsDemountable NAAMS bushings are self-lubricating and areavailable in guide post and pad styles. These bushings fully conform to the NAAMS, GM, Chrysler and Ford standards.Self-lubricating bushings contain graphite plugs which areimpregnated with oil. When the bushings reach 80-90°F as a result of friction between the bushing and guide post, oil is drawn from the plug, thus lubricating the wear surface. A dark smear pattern is created on the wear surface as the oil and graphite are imbedded into the bronze or steel grain. This provides the lubrication necessary for continuous performance of the tool.Demountable bushings are tap fit into location and seat flush with the ground face of the punch holder. The bushings are held in place with toe clamps and screws which provide perfect alignment of the bushing with the bore perpendicular to the ground surface of the punch holder. Multipe standard clamps are available.Product FeaturesNM25TABLE 1STOP BLOCK/BUSHING CLAMPSSelf-Lubricating PAD BushingsNM25PADTABLE 2PAD BUSHING RETAINER BLOCK CLAMPSCLAMP NOTES:♦See pages 10–12 for clamp part numbers and dimensional information.♦OUR PAD bushings will be supplied with (3) M8 toe clamps and screws (#6-99-1).♦NAAMS PAD bushings will be supplied with (3) M8 toe clamps and screws (#6-99-1).♦GM PAD bushings are supplied with NO clamps and screws. Order separately; for 25-50mm, order (1) 90.20.60A clamp per bushing; for 63-125mm, order (2) 90.20.60B clamps per bushing.♦CHRYSLER PAD bushings are supplied with (3) M10 toe clamps and screws (6-990-1). Chrysler PAD bushings with "*" DO NOT come with M10 clamps and screws (10/15/07 Die Standards). They use the PAD Bushing Retainer Block shown in T able 2 and must be ordered separately.♦Ford PAD bushings: 32-50mm are supplied with (1) toe clamp (#MMC0219); 63mm-100mm are supplied with (2) toe clamps (#MMC0219).1For bottoming of pads/lower rings.CLAMP SPECIFICATIONS – DANLY / IEM / NAAMS / CHRYSLERNOTE:D1 = ID of bushingD3 = OD of bushing shoulderPART #6-99-1(NAAMS #G720000C)PART #6-990-1(NAAMS #G730000C)CLAMP SPECIFICATIONS – GMNOTE:Clamps are to be ordered with each bushing.CLAMP SPECIFICATIONS – CHRYSLER – STOP/BUSHING CLAMPCOMBINATION BLOCKCLAMP SPECIFICATIONS – CHRYSLER – PAD BUSHING RETAINER BLOCK* For bottoming of pads/lower rings.CLAMP SPECIFICATIONS – FORD – TOE CLAMPS – 25mmCLAMP SPECIFICATIONS – FORD – TOE CLAMPS – 32mm – 100mmNOTE:For FORD 25mm bushing onlyNOTE:For FORD 63–100mm bushings onlyPART NUMBER MMC-0219PART NUMBER MMC-0217Lifter PinsLifter pins are manufactured from 1144 steel and are commonly used to handle large die sets. They conform to NAAMS standards.The internal spring provides added assurance that the fall ring will function properly during the course of the pin’s use.Product FeaturesLP50-190NOTES:♦All demountable bushings are supplied withmounting clamps and screws. See page 32–33 for clamping dimensions or to order additional toe clamps or mounting screws.♦Bronze-plated bushings should not be pressed-inor honed.♦See pages 30–31 for die set boring specifications.Demountable bushings are available in three profiles: extra long,long, and short shoulder to give optimum flexibility in die set design.The bushings are manufactured from hardened steel and are ideally suited for running with press fit or demountable posts. The bronze-plated bushings offer superior resistance to seizure, the major cause of bushing wear. They are recommended in high speed applications and where high side thrust loads are present.Demountable bushings are tap fit into location and seat flush with the ground face of the punch holder. The bushings are held in place with toe clamps and screws which provide perfect alignment of the bushing with the bore perpendicular to the ground surface of the punch holder. The clamp and screws provide four times the holding power compared to pressed-in bushings, yet they can be easily removed and assembled thus simplifying die building and maintenance.All bushings are equipped with figure 8 oil grooves and lubrication fittings.Product Features6-2438-28 & 6-2438-65D1D2D4E F mm mm mm mm mm mm 182832181619286-1828-64 & 6-1828-246-1828-63 & 6-1828-23Low profile demountable bushings are designed so that the main body of the bushing is contained within the punch holder while only a minimum of the bushing projects below the punch holder and intothe die area. With minimal bushing projection, this model is ideal fordies running in presses with automatic transfer devices. Since thebushings do not need to be removed during grinding, it is well suitedfor applications that require often die sharpening. The bronze-platedbushings offer superior resistance to seizure, the major cause ofbushing wear. They are recommended in high speed applications andwhere high side thrust loads are present.Demountable bushings are tap fit into location and seat flush with the ground face of the punch holder. The bushings are held in placewith toe clamps and screws which provide perfect alignment of thebushing with the bore perpendicular to the ground surface of the punchholder. The clamp and screws provide four times the holding powercompared to pressed-in bushings, yet they can be easily removedand assembled, thus simplifying die building and maintenance.6-1828-27Product FeaturesDemountable Plain BearingLow Profile BushingsNOTES:♦All demountable bushings aresupplied with mounting clamps andscrews. See pages 32–33 forclamping dimensions or to orderadditional toe clamps or mountingscrews.♦Bronze-plated bushings should notbe pressed-in or honed.♦See pages 30–31 for die set boringspecifications.Self-Lubricating Ejector BushingsNOTES:♦See pages 30–31 for die set boring specifications.These self-lubricating bushings contain graphite plugs which are impregnated with oil. When the bushing reach 80-90°F as a result of friction between the bushing and guide post, oil is drawn from the plug,thus lubricating the wear surface. A dark smear pattern is created on the wear surface as the oil and graphite are imbedded into the bronze or steel grain. This provides the lubrication necessary for continuous performance of the tool.Product FeaturesMME255mmBall Bearing Cages6-3203-81Ball cages are manufactured from a heat treated aluminum alloy which provides tough, wear resistant qualities. The ball bearings are vacuum degassed quality, fatigue resistant steel and are inspected to ensure roundness, smoothness and dimensional conformance.The ball bearings are arranged in the cage in a spiral pattern to minimize tracking or grooving and assure uniform wear. Ball cages are mounted to drilled and tapped guide posts by a special washer assembly which permits the cage to rotate freely around the guide post when not under preload.Product FeaturesTYPE I For Type I Ball Bearing Bushing AssemblyTYPE IIFor Type II and Type IIIBall Bearing Bushing AssembliesDemountable BushingsNOTES:♦All demountable bushings are supplied with mounting clamps and screws. See pages 32–33 for clamping dimensions or to order additional toe clamps or mounting screws.♦See pages 30–31 for die set boring specifications.Demountable bushings are tap fit into location and seat flush with the ground face of the punch holder. The bushings are held in place with toe clamps and screws which provide perfect alignment of the bushing with the bore perpendicular to the ground surface of the punch holder. The clamp and screws provide four times the holding power compared to pressed-in bushings, yet they can be easily removed and assembled thus simplifying die building and maintenance.Product Features6-3206-85Straight Sleeve BushingsProduct FeaturesPress fit bushings are manufactured from high quality hardened steel, the bushings are finish ground for a press fit. Like all ball bearingcomponents, these straight sleeve bushings are completely inter-changeable.6-3209-86Demountable Ball Bearing Stripper Bushings and CagesProduct Features6-2505-83 & 6-2525-87NOTES:♦All demountable bushings are supplied with mounting clamps and screws. See pages 32–33 for clamping dimensions or to order additional toe clamps or mounting screws.♦See pages 30–31 for die set boring specifications.Type III cages are made using the same material and control standards as our Type I & II cages. Type III cages use an external snap ring to act as a cage carrier and stop. This allows the cage to rotate freely around the guide post when not under preload and prevents the cage from pushing through the guide bushing at full stroke. Ball bearings are arranged in a spiral pattern in the cage to minimize tracking or grooving and assure uniform wear.Low profile demountable bushings give maximum flexibility in die set design. The low profile bushing, coupled with low mount clamping,provide maximum available die set use. The bushings are manufactured from hardened steel and are designed for use with Type III cage components. These demountable bushings are a tap fit into location and seat flush with the ground face of the die holder. The bushings are held in place with low mount clamps and screws which provide perfect alignment of the bushing with the bore perpendicular to the ground surface of the die holder.Mounting AccessoriesBALL CAGE WASHER ASSEMBLYNOTES:♦TYPE I Assembly includes stopwasher retainer and head hex screw.♦TYPE II Assembly includes stopwasher retainer, bushing stopwasher, hex head screw and snap ring.Ball Bearing ComponentsSelection GuideType IFull Pre-Load Throughout StrokeType I component assemblies ensure that all ball bearings remain in constant contact with the guide post and bushingthroughout the entire press stroke.This assembly is recommended for higher speed, short stroke dies.Type IIPre-Load Relived or Partially RelievedType II component assemblies are designed so the ball cage never leaves the bushing; however the guide post disengages thebushing at the beginning of each stroke. This assembly is often preferred as pinch points are eliminated and foreign matter cannot get inside the assembly and damage the components.This assembly is often utilized in medium and long stroke dies.Type IIITotal Disengagement of Cage from BushingType III component assemblies are designed so the ball cage totally disengages from thebushing. This assembly is utilized on long stroke applications.Product FeaturesFor proper post, bushing and cage selection, the operating conditions of the die must be taken into consideration. Factors such as press speed, shut height, stroke length and operating environment all play a role in selecting the appropriate operating condition to give the best performance possible of your components. The operating conditions include full preload, relieved and total disengagement.NOTES:♦See ball bearing lubrication recommendation on page 22.PRESS FIT POSTS1.Calculate L, the desired guide post length, using one of the following 2 formulas:Assembly with Straight Sleeve Bushings: L=T-U 1-Z Assembly with Demountable Bushings: L=T-U 1-Z-J+E2.Select a post length from the catalog that is equal to L calculated above. If the calculated L value is not astandard catalog length, you have two options. Choose the next longest length and cut off to the calculated L dimension or select a shorter length and recess the post in the punch holder to obtain correct L dimension.Note: Press fit length should be equal to or greater than the diameter of the guide post.DEMOUNTABLE POSTS1.Calculate F 1, the desired guide post length, using one of the following 2 formulas:Assembly with Straight Sleeve Bushings: F 1=T-U 1-Z-K (Note F+J+K+Y<T)Assembly with Demountable Bushing: F 1=T-U 1-Z-J+E-K (Note L 2+K+Y<T)2.Select a post length from the catalog that is equal to F 1 calculated above. If the calculated F 1 value is not astandard catalog length, choose a catalog length that is close to but less than the calculated F 1.Note: Demountable posts cannot be cut off. See page 4 for standard post lengths (F 1).BUSHING & CAGE SELECTIONSelection of a Type 1 Ball bearing bushing and cage assembly is based on the required stroke and the guide post diameter.1.Determine the guide post diameter required and the stroke required.ing the selection chart on page 25, find the desired stroke. Move down this column to the colored square onthe horizontal line opposite the required post diameter.3.Select the required bushing length which is listed to the left of the selected square in the columns labeleddemountable shoulder and straight sleeve.Note: For applications with no off-center loading, select the bushing with the shortest overall length from the selection chart. However for longer stroke applications or where side-loading may be present select the bushing with the longest possible length to provide optimal guidance.4.Select the required cage length which is also listed to the left of the selected square in the column labeled“Ball Cage.”Note: Shut height permitting, select the longest cage length possible for optimal performance.NOTES:♦If die grind is not required, stroke may be increased by the amount of die grind allowance, dimension X,found in the right most column of the selection chart.♦A die set designed for a particular stroke may be used in any press of lesser stroke but never in any press where the stroke is greater than originally chosen.♦Die shoe thickness must be greater than “E” dimension when shoulder bushings are selected.484860849898––––––––––––––––––––––––––––––––––––––––––––PRESS FIT POSTS1.Calculate L, the desired guide post length, using one of the following 2 formulas:Assembly with Straight Sleeve Bushings: L=T-U 2-Z Assembly with Demountable Bushings: L=T-U 2-Z-J+E2.Select a post length from the catalog that is equal to L calculated above. If the calculated L valueis not a standard catalog length, you have two options. Choose the next longest length and cut off to the calculated L dimension or select a shorter length and recess the post in the punch holder to obtain correct L dimension.Note: Press fit length should be equal to or greater than the diameter of the guide post.DEMOUNTABLE POSTS1.Calculate F 1, the desired guide post length, using one of the following 2 formulas:Assembly with Straight Sleeve Bushings: F 1=T-U 2-Z-K (Note F+J+K+Y<T)Assembly with Demountable Bushings: F 1=T-U 1-Z-J+E-K (Note L 2+K+Y<T)2.Select a post length from the catalog that is equal to F 1 calculated above. If the calculated F 1 valueis not a standard catalog length, choose a catalog length that is close to but less than the calculated F 1.Note: Demountable posts cannot be cut off. See page 4 for standard post lengths (F 1).BUSHING & CAGE SELECTIONSelection of a Type II and Type III Ball bearing bushing and cage assemblyis based on the required stroke and the guide post diameter.1.Determine the guide post diameter required and the stroke required.2.Determine the desired operating condition or the extent to which the cage leaves the bushing.3.Determine if a demountable or straight sleeve bushing is to be used.ing the selection chart on pages 28 & 29, find the desired stroke (S). Move down this column tothe colored square on the horizontal line opposite the required post diameter. Find the colored square in the desired operating condition.5.Select the required bushing length which is listed to the left of the selected square in the columnslabeled demountable shoulder or straight sleeve.Note: For applications with no off-center loading, select the bushing with the shortest overalllength from the selection chart. However for longer stroke applications or where side-loading may be present select the bushing with the longest possible length to provide optimal guidance.6.Select the required cage length which is also listed to the left of the selected square in the columnlabeled “Ball Cage.”Note: Shut height permitting, select the longest cage length possible for optimal performance.NOTES:♦If stroking rate is under 150 rpm, Figure B (on page 28) is recommended, which allows the ball cage to reposition at each stroke.♦A die set designed for a particular stroke may be used in any press of lesser stroke but never in any press where the stroke is greater than originally chosen.♦Die shoe thickness must be greater than “E” dimension when shoulder bushings are selected.Type II & IIINOTES:Type II & IIIBore Size Data for BushingsBORE SIZES FOR DEMOUNTABLE PLAIN BEARING BUSHINGSBore Size Data for Guide PostsBORE SIZES FOR DEMOUNTABLE GUIDE POSTSClamping SpecificationsNOTE: If not specified, clamp arrangement A will be furnished.Clamp arrangement B is furnished on Center Post Sets.We offer two ways of mounting the pins into the die plate:clamps or a retainer plug.CLAMP ARRANGEMENTS & DIMENSIONS FOR BUSHINGS & GUIDE POSTSNUMBERS Clamp Screw A B C D mm mm mm mm 6-90-1M614.315.9 4.98.76-91-1M819.815.9 4.99.5Clamping SpecificationsGuide Post 3 Clamp Arrangement Guide Post 4 ClampArrangementBushing 3 Clamp ArrangementBushing 2 & 4 Clamp Arrangementinfo@ The Anchor Danly CompanyDistributed by:WITHIN THE USA & CANADACALL: 800-652-6462FAX: 800-406-4410OUTSIDE THE USA & CANADACALL: 248-489-7816FAX: 248-553-6842。
EN50181{2010}e
Foreword
This European Standard was prepared by the Technical Committee CENELEC TC 36A, Insulated bushings. It was submitted to the Unique Acceptance Procedure and was approved by CENELEC as EN 50181 on 2010-07-01. This document supersedes EN 50181:1997. The main technical changes on the Plug-in type bushings are: – – – Enlarge the scope of the voltage class from the plug-in bushings from 36 kV to 52 kV; Upgrading the current capacity of the existing defined bushings; Introduce a new bushing interface for 52 kV.
Attention is drawn to the possibility that some of the elements of this document may be the subject of patent rights. CEN and CENELEC shall not be held responsible for identifying any or all such patent rights. The following dates were fixed: – latest date by which the EN has to be implemented at national level by publication of an identical national standard or by endorsement latest date by which the national standards conflicting with the EN have to be withdrawn __________
IEEE Std C57.19.01-2000

Creepage distance heavy, contamination
Minimum (see Note 2)
(mm)a
(in)
Col. 5
880
35
1 755
69
3 510 138
5 845 230
8 765 345
12 705 500
19 435 765
Withstand tests
60 Hz
Chopped wave crest
minimum time to flashover 3 µs (kV) Col. 9 230 402 750 1 040 1 350 1 925 2 360
Wet switching impulse (kV)
Col. 10 — — — — 825
1 175 1 450
IEEE STANDARD PERFORMANCE CHARACTERISTICS AND
4. Detailed requirements
Outdoor apparatus bushings conforming to this standard shall meet the requirements of the following as applicable:
a) Electrical insulation characteristics of Table 1 b) Dimensions of Figure 1, Table 2, and Table 3 c) Cantilever test values of Table 4 d) Partial discharge limits of Table 5 e) Power factor and capacitance limits of Table 6
CHD系列发动机维修手册说明书

g LOMBARDINI. lo Information presented within this manual assumes the following: ta 1 - The person or people performing service work on LOMBARDINI series engines is properly trained and
m Overall dimensions.......................................................................................................................................................... 15
- 7LPHVSHQWUHDGLQJWKLVLQIRUPDWLRQZLOOKHOSWRSUHYHQWKHDOWKDQGVDIHW\ULVNVDQG¿QDQFLDOGDPDJH Written information is accompanied by illustrations in order to facilitate your understanding of every step of the operating phases.
2 TECHNICAL INFORMATION ...............................................................................................................12 - 20
ABB 传感器选型指南说明书
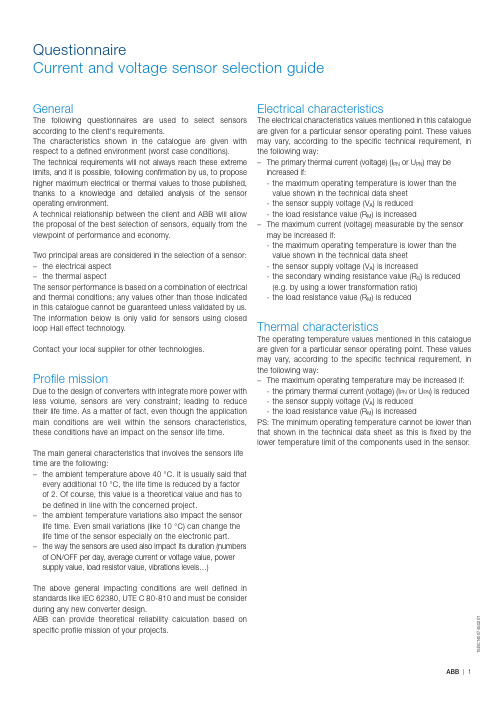
GeneralThe following questionnaires are used to select sensors according to the client's requirements.The characteristics shown in the catalogue are given with respect to a defined environment (worst case conditions).The technical requirements will not always reach these extreme limits, and it is possible, following confirmation by us, to propose higher maximum electrical or thermal values to those published, thanks to a knowledge and detailed analysis of the sensor operating environment.A technical relationship between the client and ABB will allow the proposal of the best selection of sensors, equally from the viewpoint of performance and economy.Two principal areas are considered in the selection of a sensor:–the electrical aspect–the thermal aspectThe sensor performance is based on a combination of electrical and thermal conditions; any values other than those indicated in this catalogue cannot be guaranteed unless validated by us. The information below is only valid for sensors using closed loop Hall effect technology.Contact your local supplier for other technologies.Profile missionDue to the design of converters with integrate more power with less volume, sensors are very constraint; leading to reduce their life time. As a matter of fact, even though the application main conditions are well within the sensors characteristics, these conditions have an impact on the sensor life time.The main general characteristics that involves the sensors life time are the following:–the ambient temperature above 40 °C. It is usually said that every additional 10 °C, the life time is reduced by a factor of 2. Of course, this value is a theoretical value and has to be defined in line with the concerned project.–the ambient temperature variations also impact the sensor life time. Even small variations (like 10 °C) can change the life time of the sensor especially on the electronic part.–the way the sensors are used also impact its duration (numbers of ON/OFF per day, average current or voltage value, powersupply value, load resistor value, vibrations levels…)The above general impacting conditions are well defined in standards like IEC 62380, UTE C 80-810 and must be consider during any new converter design.ABB can provide theoretical reliability calculation based on specific profile mission of your projects.Electrical characteristicsThe electrical characteristics values mentioned in this catalogue are given for a particular sensor operating point. These values may vary, according to the specific technical requirement, in the following way:–The primary thermal current (voltage) (I PN or U PN) may be increased if:-t he maximum operating temperature is lower than thevalue shown in the technical data sheet-the sensor supply voltage (V A) is reduced-the load resistance value (R M) is increased–The maximum current (voltage) measurable by the sensor may be increased if:-the maximum operating temperature is lower than thevalue shown in the technical data sheet-the sensor supply voltage (V A) is increased-the secondary winding resistance value (R S) is reduced(e.g. by using a lower transformation ratio)-the load resistance value (R M) is reducedThermal characteristicsThe operating temperature values mentioned in this catalogue are given for a particular sensor operating point. These values may vary, according to the specific technical requirement, in the following way:–The maximum operating temperature may be increased if: -the primary thermal current (voltage) (I PN or U PN) is reduced -the sensor supply voltage (V A) is reduced-the load resistance value (R M) is increasedPS: The minimum operating temperature cannot be lower than that shown in the technical data sheet as this is fixed by the lower temperature limit of the components used in the sensor.74S21Application1. Application :–Variable speed drive ................................................................ –UPS ....................................................................................... –Wind generator ....................................................................... –Active harmonic filter ............................................................... –Welding machines ................................................................... –Solar ...................................................................................... –Other (description) ......................................................................2. Quantity per year: ...........................................................................Mechanical characteristics1. Sensor fixing:–By soldering to the PCB .......................................................... –By the enclosure ..................................................................... –By the primary conductor ........................................................ 2. Primary conductor:–Cable diameter ................................................................... (mm) –Cable connection size ......................................................... (mm) –Bar size .............................................................................. (mm)3. Secondary connection:–By connector .......................................................................... –By cable without connector ..................................................... –Other ......................................................................................Sensor environmental conditions1. Minimum operating temperature ................................................ (°C)2. Maximum operating temperature ............................................... (°C)3. Presence of strong electromagnetic fields ....................................4. Max. continuous primary conductor voltage ................................ (V)5. Main reference standards ................................................................Electrical characteristics1. Nominal current (I PN ) ......................................................... (A r.m.s.)2. Current type (if possible, show current profile on graph):–Direct ..................................................................................... –Alternating .............................................................................. 3. Bandwidth to be measured ...................................................... (Hz)4. Current measuring range:–Minimum current .................................................................... (A) –Maximum current ................................................................... (A) –Duration (of max. current) .................................................... (sec) –Repetition (of max. current) ......................................................... –Measuring voltage (on R M ) at max current .............................. (V)5. Overload current (not measurable):–Not measurable overload current ........................................... (A) –Duration.............................................................................. (sec) –Repetition ...................................................................................6. Sensor supply voltage:–Bipolar supply voltage .......................................................... (±V) –Unipolar supply voltage .......................................... (0 +V or 0 -V)7. Output current–Secondary current at nominal current I PN ............................. (mA) 8. Current output (NCS range only)–Secondary current at maximum current I PMAX ....................... (mA)9. Voltage output–Secondary voltage at nominal current I PN ............................... (V)10. Voltage output (NCS range only)–Secondary voltage at maximum current I PMAX (V)Company:Address:Tel:Name:Fax:Email:Other requirements (description)74S 0201Company:Address:Tel:Name:Fax:Email:Other requirements (description)Application1. Project name ...................................................................................2. Application:Rolling stock:–Power converter ..................................................................... –Auxiliary converter ................................................................... –Other ......................................................................................Short or long distance train:–Power converter ..................................................................... –Auxiliary converter ...................................................................Metro or tramway:–Power converter ..................................................................... –Auxiliary converter ................................................................... Fixed installation (e.g. substation)..................................................... 3. Quantity per year: ............................................................................4. Total quantity for the project.............................................................Mechanical characteristics1. Sensor fixing:–By the enclosure ..................................................................... –By the primary conductor ........................................................ 2. Primary conductor:–Cable diameter ................................................................... (mm) –Bar size .............................................................................. (mm) 3. Secondary connection:–Screw or Faston...................................................................... –By connector .......................................................................... –By shielded cable .................................................................... –Other ...................................................................................... Electrical characteristics1. Nominal current (I PN ) .......................................................... (A r.m.s.)2. C urrent type (if possible, show current profile on graph):–Direct ..................................................................................... –Alternating .............................................................................. 3. Bandwidth to be measured ....................................................... (Hz)4. Current measuring range:–Minimum current .................................................................... (A) –Maximum current ................................................................... (A) –Duration (of max. current) .................................................... (sec) –Repetition (of max. current) ......................................................... –Measuring voltage (on R M ) at max current .............................. (V)5. Overload current (not measurable):–Not measurable overload current ............................................(A) –Duration.............................................................................. (sec) –Repetition ...................................................................................6. Sensor supply voltage:–Bipolar supply voltage .......................................................... (±V) –Unipolar supply voltage .......................................... (0 +V or 0 -V)7. Output current–Secondary current at nominal current I PN ............................. (mA) 8. Current output (NCS125 & NCS165 only for fixed installations)–Secondary current at maximum current I PMAX ....................... (mA)9. Voltage output (NCS125 & NCS165 only for fixed installations)–Secondary voltage at nominal current I PN ............................... (V)10. Voltage output (NCS125 & NCS165 only for fixed installations)–Secondary voltage at maximum current I PMAX (V)Sensor environmental conditions1. Minimum operating temperature ................................................ (°C)2. Maximum operating temperature ............................................... (°C)3. Average nominal operating temperature ......................................(°C)4. Maximum continuous primary conductor voltage ..........................(V)5. Main reference standards ................................................................74S 0201Company:Address:Tel:Name:Fax:Email:Other requirements (description)Application1. Project name ...................................................................................2. Application:Short or long distance train:–Power converter ..................................................................... –Auxiliary converter ...................................................................Metro or tramway:–Power converter ..................................................................... –Auxiliary converter ...................................................................Fixed installation (e.g. substation) ................................................ 3. Quantity per year: ............................................................................4. Total quantity for the project.............................................................Mechanical characteristics1. Primary connection:–By screw ................................................................................ –Other ...................................................................................... 2. Secondary connection:–Screw or Faston...................................................................... –By connector .......................................................................... –Other ...................................................................................... Electrical characteristics1. Nominal voltage (U PN ) ........................................................ (V r.m.s.)2. Voltage type (if possible, show voltage profile on graph):–Direct ..................................................................................... –Alternating .............................................................................. 3. Bandwidth to be measured ...................................................... (Hz)4. Voltage measuring range:–Minimum voltage .................................................................... (V) –Maximum voltage ................................................................... (V) –Duration (at max. voltage) .................................................... (sec) –Repetition (at max. voltage) ......................................................... –Measuring voltage (on R M ) at max voltage ............................... (V)5. Overload voltage (not measurable):–Not measurable overload voltage ............................................ (V) –Duration.............................................................................. (sec) –Repetition ................................................................................... –Category (from OV1 to OV3) ........................................................6. Sensor supply voltage:–Bipolar supply voltage .......................................................... (±V) –Unipolar supply voltage .......................................... (0 +V or 0 -V)7. Output current–Secondary current at nominal voltage U PN ............................ (mA)Sensor environmental conditions1. Minimum operating temperature ................................................ (°C)2. Maximum operating temperature ............................................... (°C)3. Average nominal operating temperature .....................................(°C)4. Main reference standards ................................................................74S 0201Company:Address:Tel:Name:Fax:Email:Other requirements (description)Application1. Project name ...................................................................................2. Application:Short or long distance train:–Power converter ..................................................................... –Auxiliary converter ...................................................................Metro or tramway:–Power converter ..................................................................... –Auxiliary converter ...................................................................Fixed equipment (e.g. substation) ................................................ 3. Quantity per year: ...........................................................................4. Total quantity for the project.............................................................Electrical characteristics1. Nominal voltage (U PN ) ............................................................ (V DC)2. Maximum voltage long duration: 5 min (U MAX2) ........................ (V DC)3. Maximum voltage overload: 20 ms (U MAX3) .............................. (V DC)4. Minimum voltage to be detected . (V)Sensor environmental conditions1. Minimum operating temperature ................................................ (°C)2. Maximum operating temperature ............................................... (°C)3. Average nominal operating temperature ..................................... (°C)4. Pollution degree ..............................................................................5. Over voltage category (from OV1 to OV3) .........................................6. Maximum ambient light level ......................................................(lux)7. Main reference standards ................................................................74S 0201。
General Eaton的Cooper Power
GeneralEaton’s Cooper Power™ series 15 kV Class fused loadbreak elbow connector combines a fully-shielded and insulated plug-in termination with full-rangecurrent-limiting fuse protection. The fused loadbreak elbow connector provides a convenient and cost effective means to adding fused protection to underground distribution systems, for connecting underground cables to transformers, switching cabinets and junctions equipped with IEEE Std 386™-2006 standard 200 A, 15 kV Class loadbreak bushings. Designed as a switching device, it istested at the maximum fuse rating in accordance to the procedures of IEEE Std 386™ standard - latest revision.Fused loadbreak elbow connectors are molded using high quality peroxide-cured insulating and semi-conducting EPDM rubber. Standard features include a copper probe adapter, coppertop connector, copper loadbreak probe with an ablative arc-follower tip and stainless steel reinforced pulling-eye. The capacitive test points are made of corrosion resistant plastic and are used for voltage detection.Cable ranges are designed to accept a widerange of cable conductor and insulation sizes and accommodate cable manufactured to either AEIC or ICEA standards.The coppertop compression connector consists of an aluminum crimp barrel inertia-welded to a copper lug and provides a connection to transition from the cable to the current-limiting fuse. The aluminum barrel makes the connector easy to crimp and the copper lug ensures a reliable, tight, cool operating connection with the current-limiting fuse.Design testsTo assure a superior level of performance the fused loadbreak elbow connector has been tested according to applicable sections of the following ANSI ® and IEEE ® standards:•IEEE Std C37.40™ standard Service Conditions and Definitions for High-Voltage Fuses•IEEE Std C37.41™ standard Design Tests for High-Voltage Fuses•IEEE Std 386™-2006 standard for Separable Insulated Connector Systems•ANSI ® C37.47 Standard Specifications for Distribution Fuse Disconnecting Switches and Current-Limiting Fuses15 kV class fused loadbreak elbowconnectorFigure 1. 15 kV Class fused loadbreak Elbow connector cutaway illustrates design features.ARC FOLLOWERLOADBREAKPROBEPULLING EYECOPPERTOP CONNECTORDRAIN WIRE TABSSEMI-CONDUCTINGDRAIN WIRE TABCURRENT-LIMITING FUSEPROBE ADAPTER2Catalog Data CA650069ENEffective January 201615 kV class fused loadbreak elbow connector/cooperpowerseriesFigure 2. 15 kV Class fused loadbreak elbow connector profile and stacking dimensions shown.20.30”(516 mm)5.27”(134 mm)4.55”(116 mm)1.75”(44 mm)3.86”(98 mm)3.25”(83 mm)otee:N Dimensions given are for reference only.3Catalog Data CA650069ENEffective January 201615 kV class fused loadbreak elbow connector /cooperpowerseriesInstallationCable stripping and scoring tools available from various tool manufacturers are recommended for use when installing fused loadbreak elbows. After preparing the cable, the cable housing is pushed onto the cable. The current-limiting fuse is threaded into the coppertop connector using the supplied hex wrench. The probe adapter and elbow housing are installed and loadbreak probe threaded into the probe adapter. Use a clampstick to perform loadmake andMN650014EN.Production testsTests conducted in accordance with IEEE Std 386™-2006 standard:•AC 60 Hz 1 Minute Withstand • 34 kV•Minimum Corona Voltage Level • 11 kV•Test Point Voltage Test Tests conducted in accordance with Eaton requirements:• Physical Inspection • Periodic Dissection•Periodic Fluoroscopic AnalysisThe fused loadbreak elbow connector, elbow/cable housing kitsare packaged in individual corrugated cardboard cartons. Each kit contains:• Fused Elbow, Cable Housing • Fused Elbow, Elbow Housing • Coppertop Compression Connector • Loadbreak Probe• Probe Adapter and Set Screws • Probe Installation Tool •1/8” Hex Wrench • Silicone Lubricant•Installation Instruction Sheetotee:N Current-limiting fuses sold separately. See T ables 6 and 7 for fuse recommendations and T able 5 for electrical ratings and catalog number information.To order a 15 kV Class fused loadbreak elbow connector kit follow the easy steps below.STEP 1e: Determine the cable’s diameter over the electrical insulation as shown in Figure 3 (including tolerances) from cable manufacturer. Then identify a cable range from Table 3 that brackets the minimum and maximum insulation diameters. Select the CABLE RANGE CODE from the far right column.STEP 2e: Identify the conductor size and type in Table 4 and select the CONDUCTOR CODE from the far right column.For an elbow kit without a compression connector, use “00” for the conductor code.STEP 3e: For a Fused Loadbreak Elbow and Cable Housing kit order:T able 3. Cable Range for Loadbreak ElbowInchesMillimetersCable Range Code0.610” - 0.820”15.5 - 20.8A 0.740” - 0.980”18.8 - 24.9B 0.910” - 1.180”23.1 - 29.9C4Catalog Data CA650069ENEffective January 201615 kV class fused loadbreak elbow connector/cooperpowerseriesEXAMPLEe: Select a fused elbow probe and conductor housing kit for 1/0 compressed stranded with a minimum insulation diameter of 0.830” (21.0 mm) and a maximum diameter of 0.890” (22.6 mm). STEP 1e: From Table 3, identify the cable range 0.740”—0.980” (18.8 mm - 24.9 mm) and select the “B” CABLE RANGE CODE.STEP 2e: The conductor size is a 1/0 and the type is compressed. From Table 4, under the column “Class B Stranded or Compressed” identify 1/0 and select the “06” conductor code.STEP 3e: Order catalog number.LFEP215TFECB06AT200 A shorting bar (solid link)The 200 A fused loadbreak elbow connector shorting bar is used for temporary restoration of service when a standard fuse is not available and can also be used during fault locating and grounding. Catalog FESBA Kit containse:(1) Shorting Bar (solid Link)(1) 3/16” re-usable hex wrench(1) 1/8” re-usable hex wrench(25) Adapter set screws(5) Wire probe wrenches(1) Bleeder strap(1) Re-usable caution tag with clasp(1) Hard plastic carrying case(1) Installation Instruction Sheet Conductor Size and TypeT able 4. Conductor Size and T ypeClass B Stranded orCompressed Compact or SolidCONDUCTORCODEAWG mm2AWG mm2No Connector00#23503#235#1–04#1–1/050051/0502/070062/0703/0–073/0–4/095084/0952*******250*120––10* Compressed stranding only.otee:N Coppertop compression connector may be used on both aluminum and copper cable conductors.T able 5. Fused Loadbreak Elbow Connector Fuse Electrical Ratings and Catalog NumbersNominal System Voltage Class - kV Nominal FuseVoltageRating kVNominal FuseCurrent ratingin AmperesFuse CatalogNumberMaximum Continuous CurrentMinimum MeltI²t (A²s)MaximumTotal I²t (A²s)25°C40°C65°C15.58.36FEF083A0068.98.58.0710 3,8008FEF083A00812.111.710.91,000 5,42510FEF083A01015.014.413.51,200 5,82512FEF083A01216.616.015.01,2005,82518FEF083A01821.921.119.71,5008,00020FEF083A02025.524.623.02,42512,00025FEF083A02534.533.231.14,50020,50030FEF083A03040.138.736.26,00026,20040FEF083A04045.543.841.09,70039,750Figure 4. Shorting bar kit, catalog FESBA5Catalog Data CA650069ENEffective January 201615 kV class fused loadbreak elbow connector/cooperpowerseries* Fuse allows more than 300% of the transformer rating.Notese:• Fuse selection is based on the continuous current rating of the fuses at 40°C• Fuses in listed Column A allow between 1.4 and 2 times the rated current of the transformer; those listed in Column B, allow 2-3 times the rated current of the transformer.• Recommended fuses meet inrush criteria of 12 times transformer full load current for 0.1 second and 25 times full load current for 0.01 second. Fuses also meet cold load pickup criteria of 6 times transformer full load current for 1 second and 3 times full load current of 10 seconds.• For three-phase applications, recommendations are limited to GRDY -GRDY transformers with no more than 50% delta connected secondary load,along with certain other assumptions. It is common practice to use line-to-ground rated fuses.T able 7. Recommended Fuse Ratings for Three-Phase Delta Applications* Fuse allows more than 300% of the transformer rating.1 **************.Notese:• Fuse selection is based on the continuous current rating of the fuses at 40°C• Fuses in listed Column A allow between 1.4 and 2 times the rated current of the transformer; those listed in Column B, allow 2-3 times the rated current of the transformer.• Recommended fuses meet inrush criteria of 12 times transformer full load current for 0.1 second and 25 times full load current for 0.01 second. Fuses also meet cold load pickup criteria of 6 times transformer full load current for 1 second and 3 times full load current of 10 seconds.6Catalog Data CA650069ENEffective January 201615 kV class fused loadbreak elbow connector/cooperpowerseriesotee:N Coppertop compression connector may be used on both aluminum and copper cable conductors.7Catalog Data CA650069ENEffective January 201615 kV class fused loadbreak elbow connector /cooperpowerseries15 kV class fused loadbreak elbow connector Catalog Data CA650069ENEffective January 2016Eaton1000 Eaton BoulevardCleveland, OH 44122United StatesEaton’s Cooper Power Systems Division2300 Badger DriveWaukesha, WI 53188United States/cooperpowerseries© 2016 EatonAll Rights Reserved Printed in USA Publication No. CA650069EN Eaton is a registered trademark.All other trademarks are propertyof their respective owners.For Eaton's Cooper Power series productinformation call 1-877-277-4636 or visit:/cooperpowerseries.。
ABB Protective Link Expulsion Fuse Type Prolink 技术

Protective Link Expulsion Fuse Type Prolink, Oil Immersed,PTAP-APR925Technical Guide15 kV , 23 kV , & 35 kVABBIZUA 5670-100General DescriptionThe Protective link is an oil immersed, expulsion type, fuseassembly for use in the high voltage circuit of a distributiontransformer. Used in coordination with the CSP circuit breaker,the protective link’s function is to disconnect a defectivetransformer from the feeder circuit, and to limit the severity ofthe damage to the transformer in case of an internal fault.The link consists of a fuse wire element contained within ahard fiber tube. The wire is welded to a top electrode at oneend and crimped to a bottom electrode or welded directly tothe cable lead at the other end. Protective links are availablein a wide variety of fuse sizes and kV classes for propercoordination with CSP circuit breakers.Application InformationFuse Curve SelectionWhen designing a CSP protection scheme, the secondaryCSP circuit breaker is selected first. After the secondary circuitbreaker is selected, the protective link is chosen so that propercoordination between the primary side protective link and thesecondary side circuit breaker is achieved. The simplest wayto determine if proper coordination has been achieved is tocompare the time versus current characteristics curves (TCCcurves) of both devices. Coordination is acceptable when,for all values of secondary fault current, the circuit breaker will clear the fault before the protective link melts. The protective links are produced in a wide range of fuse sizes which are described on curve drawing 697700 for minimum melt characteristics and curve drawing 735701 for average clearing characteristics.Circuit Connection The protective link is connected between the primary winding and high voltage bushing. In a transformer with a single high voltage bushing (where one end of the primary winding is connected to the ground), one protective link per transformer is used. In a transformer with two high voltage bushings, two protective links are used. A typical CSP transformer schematic diagram is shown in Figure 1.A jack bolt (style number 240A394H01 ordered separate) fits into the 0.25 x 28 thread in the top terminal of the protective link and may be used to make up the top connection to the link. In lieu of this bolt, any standard 0.25 diameter x 28threads per inch x 0.38 thread length bolt will work.The lower connection to the protective link is made through the flexible cable lead. The flexible cable lead is specified on the dimension sheets as: number of wire strands - individual wire strand thickness (example 259-0.005 = 259 strands of 0.005 diameter wire).Mounting Information Protective links may be mounted in any orientation as long as the expulsion arc will be under oil during arc interruption.Standard mounting configuration is in a near vertical to vertical Figure 1:Schematic Diagram of CSP Transformer2ABB:1e l b a T g n i t a R n o i t p u r r e t n I e g a t l o V n o i t a c i l p p A 1g n i t a R g n i t p u r r e t n I 2)s e r e p m A l a c i r t e m m y s s m r (004,2000,5008,4008,4002,7005,3000,21000,3004,41005,2000,32002,1005,43002,11:s a d e t s i l e g a t l o V n o i t a c i l p p A d n u o r G o t e n i L :e s a h P e l g n i S e n i L o t e n i L :e s a h P e e r h T 2k n a t d n u o r d e t c u r t s n o c l l e w a n o d e s a b e r a s g n i t a r n o i t p u r r e t n I d a p r o f r e t a e r g e b y l l a r e n e g l l i w s g n i t a R .r e m r o f s n a r t n o i t u b i r t s i d r a l u g n a t c e r e h t f o e s u a c e b s r e m r o f s n a r t n o i t u b i r t s i d d e t n u o m y g r e n e f o t n u o m m a e l b a r e d i s n o c a b r o s b a o t y t i l i b a s 'k n a t .n o i t p u r r e t n i t l u a f t n e r r u c h g i h g n i r u dABB3ABB Inc.1128 S. Cavalier Drive Alamo, TN 38001, USA Telephone: 731-696-5561 Fax: 731-696-5362 IZ U A 5 6 7 0 -1 0 0 en R ep lacesT P L 4 4 -8 3 9 ,F eb ru ary2 0 03 Pri nte di n U S A by Te n nesseeI n d ustrial Pri nti n g Services,I nc.。
电泵勺管执行器(ABB)
OperatingInstructions
42-68-151EN
l t
i I
i
I
{-
,.d*
(d036rxa)
n nrr'
FAt'il'
T a b l eo f C o n t e n t s
D e v i c e l ( j c , n I ici : e r t ' o n General
Storage DeliveryState......;
TechnicaDl ata .
Lubrication.
Mounting
ElectricaCl onnection.
Setup.
Maintenance
TrOUbleShOOting...
Y o u rn o t e s .
....,.
') 21 3 3 ..4
5 .......6
11
13 15
16
1. Deviceldentification
l - r a z a roc fi p e r s o n ailr r j r - ror yr o f c l a r n a g e1 s6 r ti r r r p a i r r t . t ecrl f,tih e o p e r a t i o n arle l l a b i l i tcy, { t h e c l e v i c em a y a r i s e .
1.1 Actuator lD Label
1 Antrieb/ Actuator: CONTRAC....
z F-Nr.iNo
NL
J
M=
4
5 min......ma.x....
水轮机常用英语词汇
A安装高程 setting elevation安全阀 safe valve安装图 wiring layout Installation diagram按合同in accordance with contractB布置图 arrangement plan比转速 specific speed比例增益 proportional gain补气 air admission air supply补气装置 air supply device电压器 transformer本图只供电站设计时参考 this drawing is for design reference备用16件 spare parts 16 pieces标准件 standard components不可调式水力机械 non-regulated hydraulic machineryC冲击式水轮机 impuls turbine操作架 crosshead初生空化系数 incipient cavitation factor初始压力 initial pressure尺寸图 dimensional drawing××尺寸暂定the measurements of ×× is tentative 出厂 workshop初步设计 preliminary design侧视 Side-view测速装置 speed senser测压管pipe of measuring pressure测频单元 frequency senser厂房地平groundD导水机构 distributor垫圈 washer顶盖 headcover top cover底环 bottom ring导水机构 distributor导叶 guide vane导叶臂 guide vane lever rocker arm导叶连杆 ~ link导叶过载保护器 ~ overload protection device导叶止推轴承 ~ thrust bearing导叶轴承 ~ bearing导叶轴 guide vane shaft导叶销 guide vane pin导叶轴套 guide vane bushings导叶轴密封 ~ stem seal导叶端面密封 ~ end seal导叶立面密封 ~ seal导叶限位块 ~ stop block导叶接力器 individual ~导轴承 guide bearing导叶轴压盖 the gland of guide Vane shaft导流盖diversion cover导流部分diversion part大气压 atmospheric pressure电机 motor低压力 under pressure调查报告 report of investigation电液调速器 electro-hydraulic governor电液转换器/电液伺服electro-hydraulic transducer/servovalve 低压机组 LV units电源 electricity supply电压 voltage电流 current(主)断路器(main)circuit breaker地脚孔 anchor bolt hole地钩fixation hook地脚螺栓 foundation bolt吊环螺钉 lifting eye screw吊环rings吊钩lift hook镀锌管 galvanized pipe电站预埋 embedded by power station电站配割焊welding and cutting电站自行设计designed by power station电站自备 power station self-provided丁氰橡胶thiakol rubber单耳止动弹圈one ear stop spring coil灯泡式水轮机 bulb turbine蝶阀butterfly valveE额定 rated峨眉山市驰骋机械Emeishan Chicheng Machinery Co.,Ltd二期混泥土Second ConcreteF反击式水轮机 reaction turbine分半键 split key飞逸 runaway speed飞逸特性曲线 runaway speed curve分段关闭装置 step closing device辅助接力器 auxiliary servomotor辅助设备 auxiliary equipment封面 surface plot负载 on load辅助常闭 auxiliary normally close封水座 seal block(pedestal of seal water)封水装置seal water devise发电机出风道 generator vents方向自定 direction customised方头短圆柱锥端紧定螺钉square set screws with short dog point and cone end放水阀drain valve放水旋塞 drain cock放水管盖offlet cover发电机 generatorG孤立运行 isolated operation工作油压 operating oil pressure工作油压上限/下限 upper /lower limit of operating oil pressure功率(表) power(meter)工况 operating condition固定导叶 stay vane固定盘fixed plate贯流式水轮机 tubular turbine工程竣工图completion drawing规范 Specification盖形螺母 cap nut钢steel钢垫steel liners钢背复合自润滑材料steel backing composite self-lubricatingmaterial管路部分pipe sectionH混流式水轮机 Francis turbine蝴蝶阀 butterfly valve缓冲装置 damping device缓冲器 dashpot缓冲装置时间常数 time constant of damping device电气缓冲 electrical damper焊接 welding后盖板 back cover回油箱 oil sump tankJ接力器 servomotor接力器行程 servomotorst roke接力器最短关闭时间 minimum servomoter closing time机坑里衬 pit liner接管 connecting pipe径向力 radial force机械效率 mechanical efficiency绝对压力 absolute pressure加权平均水头 weighted average head净水头 net head进水管water inlet进人门 mandoor检修密封 stand still seal剪断销 shear pin基础环 foundation ring机组 unit技术设计 technical design机械液压调速器 mechanical hydraulic governor 截止阀 globe valve减压板 decompression plate接地栓 grounding spigot静态特性 static characteristic加速时间常数 derivative time constantK可调式水力机械 regulated hydraulic machinery可调油轴承 adjustable oil bearing控制环 regulating ring抗磨板 facing plates抗磨滑块 wear slider block空化 cavitation空蚀 cavitation erosion空化系数 cavitation factor开关保险丝 switch-fuse空气开关 air-operated switch扩大初步设计 enlarging preliminary design开度限制机构 opening limit mechanism空载 no-load可控硅 SCR开槽圆柱头螺钉 slotted pan head screwL漏油箱 leak oil tank流量 discharge力特性 force character临界空化系数 critical cavitation factor联轴螺栓 couping bolt连杆 link连杆装配 link assembly立式机组 vertical unit励磁屏 excitation screen螺母 nut连板铜套 copper cover with plate六角薄螺母hexagon thin nut六角头螺栓 hexagon headed bolt螺尾锥销 nut tail cone pin螺旋扣turnbuckle(尾水管)拉钩 the drag hook of (tail water)拉环suspension link拉板pulling plate连接法兰 coupling flangeM埋入部件 embedded component摩擦装置 friction device毛水头 gross head目录 list明细表 order sheet灭磁 de-excitation面板 panel密封环 sealing ringN内螺纹旋塞阀 internal-thread plug valve内接头 internal-thread connecting tubeOO型密封圈 O-seal ringP平板蝶阀 biplane butterfly valve through flow butterfly valve 平键key旁通阀 by-pass valve盘形阀 mushroom valve,hollow-cone valve,howell-Bunger valve 配压阀 distributing valve排至集水井 lead the water into the collector well排水孔 drain hole排水管 drain pipe排水阀座 pedestal of draw off valve平垫圈 plat washer偏心销 eccentric pin爬梯 ladderQ驱动器 driver球阀 rotary valve ball valve spherical valve起励 initial excitation前盖板 front cover全贯流式水轮机 straight flow turbine,rim-generator unitR软启动器 soft-starter热敏开关 thermo switch人工(频率)死区单元S死区 dead band甩负荷 load rejection手动运行 manual operation事故低油压 tripping oil pressure双漏油器 double oil-filter双调整调速器 double regulating governor水力矩 hydraulic torque水流惯性时间常数 water interia time constant水推力 hydraulic thrust水封压板 seal pressure plate射流入射角 jet inclined angle射流直径 jet diameter水轮发电机组hydroelectric generating set水锤 water hammer水封装配seal water assembly水力机械 hydraulic machinery水导轴承装配assembly of the bush of water flowing diversion bearing 式中 type in输入功率 input power输出功率 power output梳齿密封座comb-tooth-type Seal block(下/上)梳齿环(upper/ below) comb-tooth ring设计水头 design head速度水头 elocity head受油器 oil head上冠 crown双击式水轮机 double-flow turbine cross-flow turbine施工图设计construction design设计规范 design specification示意图 Diagrammatic sketch施工图 Working drawing说明书 Instruction book水斗式水轮机 Pelton turbine scoop turbine双击式水轮机 cross-flow turbine受油器 oil head输入(输出)功率 input(output)power水力的 hydraulic水力机械 hydraulic machinery水电站 hydropower station双头螺柱 stud三通旋塞 three way cock竖井贯流式水轮机 pit turbineT通流式调速器 through flow type governor推拉杆 push and pull rod调速轴 regulating shaft(governor shaft)调速耳座 speed lug调速环铜套copper sheathing of speed ring调速机构 speed institutions(regulating mechamism)调速系统 governing system弹垫圈 spring washer通用件standard parts铜套 copper bushUVW蜗壳 spiral case蜗室剖面图section plane views蜗壳鼻端 spiral case nose尾水闸门tail water sluice gate尾水管 draft tube tail water piping尾水管扩散段 draft tube outlet part尾水管支墩 ~ pier尾水管里衬 ~ liner外购procurement卧式horizontal unitX斜流式水轮机 inclined jet turbine diagonal turbine 斜流转桨式水轮机 Deriaz turbine斜流定桨式水轮机fixed blade of Deriaz turbine下环 band下游最低尾水位the minimum tail-water level泄水锥 runner cone discharge cone协连装置 combination device相序采样 phase sequence sampling橡胶条 rubber橡胶轴承rubber bearing橡胶圈rubber ring橡胶管 rubber pipe选用select旋塞阀 plug valve旋转方向 direction of rotation相似工况 similar operating condition协联工况 combined condition现场焊缝 field weldingY压力罐式调速器 governor with pressure tank压盖 gland油压装置 oil pressure supply unit油箱座 tank block油箱tank引导阀 pilot distributing valve引水室 flume叶片 blade叶片枢轴 runner blade trunnion叶轮 impeller圆柱销 cylindrical pin圆锥销 taper pin压板 pressure plate预埋至机坑 embedded into foundation pit永态转差系数 permanent speed droop一期混泥土First Concrete一件 a piece of(水轮机)运转特性曲线(turbine)performance curve Z整体设计 overall design总图general drawing总装图general installation drawing装配图assembly drawing组合件 assemblies组画Section drawing主视图 top view主图 Master plane闸阀 gate valve止回阀 check valve轴流式水轮机 axial turbine轴流转桨式水轮机 Kaplan turbine轴流调桨式水轮机 Thoma turbine轴流定桨式水轮机 Propeller turbine真空破坏阀 vacuum break valve座环 stay ring锥形尾水管 conical draft tube肘形尾水管 elbow draft tube肘型管 elbow转动部件 rotating component转轮 runner止漏环 wearing ring轴套 shaft sleeve轴领 guide bearing collar轴瓦 guide bearing shoe轴承体 guide bearing housing轴承座bearing support轴承架 bearing retainer转轮室 runner chamber支持盖 inner head cover支撑环 support ring支墩buttress dam转轮体 runner hub转叶机构 mechanism of runner blade转轮叶片接力器 runner blade servomotor最大(最小)水头 maximum(minimum) head中间接力器 pilots ervomotor中间轴承the middle bearing主配压阀中间位置 meutral position of main distributing vavle主阀 main valve整流回路 rectification circuit最低尾水位 min tail water level锥管段 cone主轴密封 mail shaft seal暂态转差系数 temporary speed droop止推垫片 stopping shim装配 assembly罩子 cover直锥尾水管 straight tap直通旋塞 straight through type cock针形阀 needle valve组焊件 assembly and welding part导轴承 guide bearing(水轮机)综合特性曲线(turbine)efficiency hill diagram,combinedcharacteristic curve最优比转速 optimum specific speed专用工具 special tool1、本图仅供机组布置情况特征尺寸,有关基础及水工布置情况电站自行设计。
Balluff网络接口模块说明书BNI EIP-508-105-Z015

EtherNET/IPIntelligent functionsGeneral attributesApprovals / Conformity CECSAUL94ODVADevice description file BNI EIP-508-105-Z015.eds Enclosure Type per IEC 60529IP67 (when connected) Indicator actuators supply UA Yes, LED green Indicator IO-Link comm.Yes, LED green Indicator sensors supply US Yes, LED green Indicator switching function Yes, LED yellow Mounting instruction See short guideScope of delivery20x labelsShort guideScrew M4x64x plugs M12CirclipGround strap Transmission protocol EtherNETElectrical attributesAddress range IPV4Bus system EtherNET/IP Configurable in-/outputs YesCurrent sum UA (actuator)9.0 ACurrent sum US (Sensor)9.0 AEff. operating voltage Ue DC24 V Inputs PNP, Type 2IO-Link MasterIO-Link Specification 1.1Number of auxiliary interfaces8x IO-LinkNumber of inputs16Number of outputs 2A16Operating voltage UB max. DC [V]30.2 VOperating voltage UB min. DC [V]18 VSwitching output PNPTransfer rate COM2 (38.4 kBaud)COM1 (4.8 kBaud)COM3 (230.4 kBaud) Transfer rate max.100 Mbit/sTransfer rate min.10 Mbit/sMechanical attributesAmbient temperature Ta max.55 °CAmbient temperature Ta min.-5 °CHeight37.9 mmHousing material GD-ZnAl4Cu1 (die-cast zinc) Housing shield YesLength224.0 mmMounting ground strap M4Mounting type2-hole screw mounting Number of plug-in positions8Storage temperature max.70 °CStorage temperature min.-25 °CStyle Two-row Surface protection Cu 15 µ / Ni 15 µWidth68.0 mm IO -Link PIN 1: +24V, 1.6A PIN 2: In-/output 2A PIN 3: 0V PIN 4: IO-Link/ I / O 1.6APIN 5: n.c.PIN 1: +24V PIN 2: +24V PIN 3: 0V PIN 4: 0VPower Out Ethernet IP PIN 1: Tx+PIN 2: Rx+PIN 3: Tx-PIN 4: Rx-PIN 1: +24V PIN 2: +24V PIN 3: 0V PIN 4: 0V Power In。
ABB TB82PH 2-线pH ORP 吸合力传感器传输器说明书

—ABB MEASUREMENT & ANALYTICS | DATA SHEETTB82PH2-wire pH / ORP / plon transmitters2TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H—Measurement made easyLoop-powered transmitter that reduces installation costs in hazardous areasIntuitive user interface• easy-to-use menus guide the operator through set-up, calibration and maintenanceAdvanced digital communications• available with PROFIBUS® PA, FOUNDATION™ Fieldbus orHART communicationsHazardous area transmitters• withstand the harshest environments• NEMA 4X / IP65 housingsLarge, easy-to-read display• shows primary measurement together with user-selectable secondary display (temperature, output current or sensor input) Programmable security codes• prevents unauthorized modifications to transmitter configuration and calibrationIntrinsically safe, non-incendive design• enables use in hazardous areas3 TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H—General descriptionThe rugged ABB TB82 two-wire pH, ORP (REDOX), pIon transmitter is designed for a broad range of industries from chemical, power and pulp & paper to water & wastewater treatment.The TB82 is available with traditional programmable outputs or with advanced digital communications using Foundation Fieldbus (FF), PROFIBUS PA (PA) or HART.Setup, maintenance and operation in the field is simple. Easy-to-follow instructions appear above each smart key. The user-friendly interface enables straightforward transmitter configuration and calibration.A unique secondary display clearly defines each menu option when programming the transmitter. During normal operation, the secondary display may be configured to show process temperature, current output, mV or software revision depending upon configuration.The TB82 transmitters meet current CE, NEMA 4X, IP65, CSA, FM, ATEX and FISCO requirements.—Sensor compatibility and rangesThe TB82PH transmitter accepts ABB's pH, oxidation / reduction potential (ORP) and ion-selective (pIon) sensors in addition to most competitors' sensors .—CalibrationIn addition to the traditional two-point calibration, the TB82 features a simple one-point process calibration to adjust for offsets that may occur when the sensor is in process. When initiating a two-point calibration, the user has the option to hold the analog output at a defined level. If necessary, theTB82 may be easily reset back to a factory calibration.—Programmable security codeThe transmitter has a 3-digit security code to prevent unauthorized modifications to any combination of the following menus: Calibration, Output / Hold, Security and Configure.—Basic or advanced programming modes Note. FOUNDATION Fieldbus, PROFIBUS PA models and HART are available only in advanced mode.Available with either basic or advanced programming modes at time of purchase, the advanced mode offers an expanded feature set for more complex operations, for example:• Automatic Nernstian with solution coefficient–Temperature compensation compensates the sensoroutput to a standard temperature value of 25 °C (77 °F)using the Nernst equation and a solution coefficient • Ion concentration–Converts a pIon sensor output to concentration units(for example, parts per million or parts per billion)• Analog pulse diagnostic output–Impresses a user-defined 0.16 to 16 mA pulse on the4 to 20 mA output to alert the operator of a faultcondition (not available on transmitters with digitalcommunication).—DiagnosticsThe transmitter constantly monitors both itself and the sensor to ensure reliability and accuracy. On detection of a diagnostic condition, the transmitter provides diagnostic notification by flashing FAULT on the display and supplying a pulse on the analog output (if activated on non-HART devices).Transmitters equipped with Foundation Fieldbus or PROFIBUS PA send a complete diagnostic description over the network to the controller. This enables easy, immediate troubleshooting. Pressing FAULT info on the transmitter provides a short description and fault codes on the secondary display. The FAULT icon remains active until the problem has been resolved.Sensor faults that activate the diagnostic notification are:• Broken glass electrode 1• High reference impedance 1• Shorted or damaged cable• Open cable• Sensor not in contact with the solution 1• Shorted or open temperature compensator• Ground loop 11 Requires the use of pH sensors with solution ground rods (for example, the ABB TBX5 sensors).4TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H—Adjustable dampingDamping is helpful in process environments where noise is present. It is a capacitive type lag where reaction to any signal change is slowed according to the entered time constant. For example, the response to a step input change reaches approximately 63 % of its final value in five seconds for five seconds of damping.—CommunicationsFOUNDATION Fieldbus (FF) addresses modern instrument users' needs for flexibility and cost savings, while providing a whole host of additional features.• Measurement variable quality and diagnostic conditions transmitted during each scheduled data transfer• Easily configured remotely or locally• Transmission of multiple process variables using two analog input blocks (AI)• Transmitter characteristics such as device name, manufacturer and serial number via a standard resource block• Configuration and calibration capability via custom enhanced transducer block• Provides calibration methods on supported host tools and systemsPROFIBUS PA (PA) is a standardized, open, digital communications system for process automation.• Configuration, calibration and trending available via a Device Type Manager (DTM) when used on compatible host tools and systems• Measurement variable quality and diagnostic conditions transmitted during each scheduled data transfer• Remote and local configuration capability• Choice of standard analyzer profile or manufacturer specific profile – conforms to PROFIBUS PA Profile requirements v. 3.0• GSD files available on all product variations• Utilizes one physical, one transducer, and two analog input blocksHART communications protocol provide remote programming via any HART-compatible primary or secondary communications device.• Digital communications through a low-level modulation superimposed on the standard 4 to 20 mA current loop • Accommodates universal, common practice and device-specific command sets for functionality within HART networks and for use with HART hand-held terminals• Driver files for various host systems and tools are available. Visit /measurement.5 TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H—SpecificationType2-wire pH / ORP / plon transmitterInput sensor typespHGlass, antimony (Sb), custom iso-potential andasymmetric potentialORPPlatinum (Pt), gold (Au)pIonSodium (Na), chloride, sulfide, etcInput rangepH0 to 14 pH (with –2 to +16 pH over range)ORP / pIon±1999 mVInput temperature compensation types • Pt 100• 3 kΩ BalcoTemperature display range–20 to 300 °C (–4 to 572 °F)Temperature compensation modespH/ORP/plon• Manual Nernstian• Standard automatic Nernstian• Automatic Nernstian with solution coefficient Accuracy, repeatability, non-linearitypH display±0.01 pHORP display±1 mVpIon display±1 mVTemperature display1 °C or 1 °FOutput±0.02 mA (non-FF devices)Lightning suppressorInstalled integral to the transmitter to suppress lightning induced transients. Tested to suppress 10 successive 8 by20 μsec pulses with a peak value of 20 kA (reference IEEEC62.41)Power requirementsStandard14.0 to 53 V DC (14.0 to 42 V DC for certified applications) HART14 to 53 V DC (14 to 42 V DC for certified applications).For HART communication, a 250 Ω resistor is required;19 V DC minimum voltage required. 14 V DC required forliftoffFoundation Fieldbus & PROFIBUS PA bus powered9 to 32 V DC (non-I.S. model)9 to 24 V DC (I.S. model)15 mA quiescent current consumptionAgency certificationsATEX Directive 2014/34/EU andIECEx LCIE16.0012XATEX Category II 1G; Ex ia, Zone 1; Group IIC, T4 when used with appropriate barriersCanadian Standards Association (CSA)Intrinsic safety:• Class I, II, III; Division 1; applicable Groups A, B, C, D, E, F and G; when used with appropriate barriers. T3C Non-incendive:• Class I, Division 2, Groups A, B, C, and D. Class II, Division 2, Groups E, F and G. Class III, Division 2 Factory Mutual (FM)Non-incendive:• Class I; Division 2; Groups A, B, C, D; T3C• Class II; Division 2; Groups E, F, G; T3C• Class III; Division 2; T5Fieldbus Intrinsically Safe Concept (FISCO)Fieldbus products (FF and PA) meets the requirements for the FISCO modelEMC requirementsConforms to the Directive 2014/30/EU and EN 61326-1 for CE marking.6TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H —…SpecificationStabilitypH±0.01 pHORP / pIon±1 mVOutput±0.01 mATemperature1 °C or 1 °FDynamic response3 secs for 90 % step change at 0.00 sec damping OutputpHIsolated 4 to 20 mA, linear and nonlinear,configurable across full pH rangeORP / pIonIsolated 4 to 20 mA, linear and nonlinear,configurable across full rangeOutput minimum spanpH1.00 pHORP / pIon100 mVOutput maximum span (Full scale settings) pH14 pH unitsORP/pIon–1999 to 1999 mVDampingAdjustable, 0.0 to 99.9 seconds Environmental (temperature)Operating–20 to 60 °C (–4 to 140 °F)LCD–20 to 60 °C (–4 to 140 °F)Storage–40 to 70 °C (–40 to 158 °F)Humidityup to 95 % RH EnclosureNEMA 4X and IP65, anodized aluminum alloy withpolyester powder coatingSize (1/2 DIN), H x W x D144.0 x 144.0 x 171.0 mm (5.67 x 5.67 x 6.73 in) Min. panel depth144.8 mm (5.70 in)Max. panel thickness9.5 mm (0.38 in)Panel cutout135.4 [+1.3, -0.8] by 135.4 [+1.3, -0.8] mm(5.33 [+0.05, -0.03] by 5.33 [+0.05, -0.03] in)Weight• 1.9 kg (4.2 lb)• 3.4 kg (7.5 lb) with pipe mounting hardware Conduit connectionsTwo each: 22.2 mm (0.875 in) holes in enclosure that accept 1/2 in hubs7TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H —DimensionsDimensions in mm (in)TransmitterFrontSideBottomPipe-mount optionPanel-mount optionMinimum panel depth = 144.8 (5.7)8TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H—…DimensionsDimensions in mm (in)Wall (side) mounting optionWall / Hinge (rear) mounting optionTop view Front viewTB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H9—Electrical connections10TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H—Ordering information2-wire conductivity transmitter – base model TB82PH X X10X X X Input typeph, ORP, pIon PHProgramming option1Basic Advanced 1 2Digital communications optionNone (analog only) HART FOUNDATION Fieldbus PROFIBUS PA 0 1 2 3Lightning suppressorIncluded1 Housing typePowder-coated aluminum0 Mounting optionsNonePipeWall / Hinge (rear mount) PanelWall (side mount)0 1 2 3 4Agency approvalsNoneFM (Factory Mutual)CSA (Canadian Standards Association) ATEX 0 1 2 3TagNone Stainless steel Mylar 0 1 21 Advanced programming option must be selected for HART, FOUNDATION Fieldbus or PROFIBUS PA digital communication option —AccessoriesPanel-mount kit: 4TB9515-0123Pipe-mount kit: 4TB9515-0124Hinge-mount kit: 4TB9515-0125Wall-mount kit: 4TB9515-0156BNC adaptor 4TB9515-0164BNC adaptor with liquid-tight cable fittings 4TB9515-016611TB82PH 2-WIRE PH / ORP / PION TRANSMIT TERS | DS/TB82PH-EN REV. H Sales Service—Acknowledgements• Mylar is a registered trademark of Dupont Teijin Films.• HART is a registered trademark of the HART Communication Foundation.• PROFIBUS is a registered trademark of PROFIBUS and PROFINET International (PI).• FOUNDATION is a registered trademark of the Fieldbus foundationD S /T B 82P H -E N R e v . H 07.2018—ABB LimitedMeasurement & Analytics Oldends Lane, Stonehouse Gloucestershire, GL10 3TA UKTel: +44 (0)1453 826 661 Fax: +44 (0)1453 829 671ABB Inc.Measurement & Analytics 125 E. County Line Road Warminster, PA 18974 USATel: +1 215 674 6000 Fax: +1 215 674 /measurement—We reserve the right to make technical changes or modify the contents of this document without prior notice. With regard to purchase orders, the agreed particulars shall prevail. ABB does not accept any responsibility whatsoever for potential errors or possible lack of information in this document.We reserve all rights in this document and in the subject matter and illustrations contained therein. Any reproduction, disclosure to third parties or utilization of its contents – in whole or in parts – is forbidden without prior written consent of ABB.© Copyright 2018 ABB.All rights reserved.3KXA162801R1001。
Tech Tip 说明书
KINGPIN REPLACEMENTAuthor: Randy BaumannAll information, illustrations and specifications are based on the best information available at the time of publication.The author cannot guarantee the accuracy of the information contained in this publication. Corrections are welcomed,**************************************.Information included in this publication comes from a variety of sources, that include, but are not limited to the following:Chevrolet Shop Manual, 1942—1948 Passenger Cars and 1942—1946 Trucks ©This information is provided to assist fellow hobbyists in the restoration and maintenance of their Chevrolet™ trucks.Additional Contributors:Dave Feltner “Koolkar”Stuart Miller “atomarc”INTRODUCTIONNOTE: The following procedure documents a typicalkingpin replacement. The details of your application will vary. Always refer to the service manual that matches to year, make and model of your vehicle for the correct procedure.The kingpins and bushings are important parts of the steering system. Regular maintenance and inspection are necessary to ensure safety operation.1/2- and 3/4-ton trucks use bronze “floating” kingpin bushings that do not require reaming. These bushing are manufactured to final size.1-1/2-ton conventional trucks and school buses use spindle bushings that are press-fit into the spindles, and require reaming to the final size.Chevrolet™ is a registered trademark of the Chevrolet Motor Division of the General Motors Corporation.TECH TIPCOMPONENT IDENTIFICATIONA460195AFigure 1: Spindle Assembly Cross Section View—Driver’s Side, Viewed from RearA—Dust Cap B—NutC—Outer Bearing D—Spindle E—HubF—Inner Bearing G—Brake Drum H—Wheel Cylinder I—Backing PlateJ—Grease Fitting (3 Used)K—Lock PinL—Stop Bracket M—Steering Arm N—Axle O—Tie Rod P—Tie Rod End Q—Kingpin R—Brake Shoe S—Bearing T—Seal U—WasherTECH TIPREMOVALThe following procedures document a typical kingpin application for 1/2- and 3/4-ton trucks. The procedure for 1-1/2-ton truck and school buses are similar.WARNING!SUPPORT THE VEHICLE SECURELY!Place jackstands under the frame rails. Never work under or near a vehicle supported only by a jack or other lifting device. Failure to properly support the vehicle and components may result in death or serious injury.1. Lift the vehicle until both wheels are off the ground.Place jackstands under the frame rails behind the springs.2. Remove the wheels and tires.3. Remove the brake components and backing plates, andsteering arms.A460121BFigure 2: Remove Retaining Rings and Dust Caps 4. See Figure 2. Remove the top and bottom retainingrings (A) and dust caps (B) from spindle (C).A460123BFigure 3: Remove Locking BoltCAUTIONDO NOT use heat to remove the kingpin. Heat may weaken or distort the spindle and axle.5. See Figure 3. Remove the nut (D), lock washer (E),stop bracket (F) and kingpin locking bolt (G).NOTE: If the kingpin cannot be driven out, remove theaxle from the vehicle and use a press to remove the kingpin.6. Drive the kingpin (H) out using a hammer and soft brass punch.TECH TIPA460124BFigure 4: Remove SpindleIMPORTANTRecord the location and number of shims used (if any) to ensure proper assembly.7. See Figure 4. Remove the spindle (C), thrust bearing(I) and shim (J) (if any) from the axle (K).A460126BFigure 5: Remove Spindle BushingsIMPORTANTUse caution when removing bushings, DO NOT damage the bushing bore.8. See Figure 5. Remove the bushings (L) from the spindle (C) using a soft brass punch.9. Remove the grease fittings (M).TECH TIPINSPECTIONA460204AFigure 6: Inspect the Spindle AssemblyCAUTIONDO NOT use sandpaper or abrasives to clean the spindle and axle bores. The use of abrasives will remove excessive material, causing a loose kingpin fit and premature wear.1. See Figure 6. Thoroughly clean and inspect the spindle assembly. Replace the spindle if any damage is noted.2. Inspect the spindle kingpin bushing bores (A). The bores should be free of pitting, rust, scoring or cracks. Light rust or pitts can be removed using a brake hone. Replacethe spindle(s) as needed.A460205AFigure 7: Inspect Axle Bore3. See Figure 7. Inspect the axle kingpin bore (B). The bores should be free of pitting, rust, scoring, cracks, or worn out-of-round. Replace the axle if any damage is noted.Apply anti-seize compound to the axle kingpin bore (B),and insert the new (replacement) king pin (C), into the axle to check the fit. The king pin should be a hard hand-push fit, and should not have any play.If any play is noted, an oversize kingpins and bushings must be used, and the axle bore must be reamed to fit the new king pin.NOTE: If proper equipment is available, the axle may bereamed while the axle is still installed on the vehicle.If not, remove the axle, and have a have it reamed to match the oversize kingpin at a machine shop.TECH TIPINSTALLATIONWARNING!SUPPORT THE VEHICLE SECURELY!Place jackstands under the frame rails. Never work under or near a vehicle supported only by a jack or other lifting device. Failure to properly support the vehicle and components may result in death orserious injury.A460126CFigure 8: Install Spindle BushingsIMPORTANT!When installing the bushings, it is important that the grease channels are aligned with the grease fittings. Installing the bushing incorrectly will result in premature kingpin and bushing wear.1. See Figure 8. Install new grease fittings (A) into spindle (B).2. Apply a light coat of wheel bearing grease to the new bushings (C), and install bushings, aligning the greasechannels (D) in the bushing with the grease fittings (A).A460124CFigure 9: Install the Spindle and Thrust Bearing NOTE: Install the thrust bearing with the dust shield up(toward the axle).3. See Figure 9. Install the spindle (B) and thrust bearing (E) on the axle (G). Check the clearance between the spindle and axle. If the clearance is greater than 0.006”,install a shim (F)A460123CFigure 10: Install the Kingpin4. See Figure 10. Install the kingpin (H), aligning the notch (I) in the kingpin with the lock pin hole (J) in the axle.5. Install the lock pin (K), stop bracket (L), lock washer (M) and nut (N).TECH TIPA460121CFigure 11: Install Dust Caps and Retaining Rings6. See Figure 11. Install dust caps (O) and retaining rings(P).NOTE: Tighten spindle nut to specifications. Always usea new cotter pin when installing the spindle nut.7. Install backing plates, brake components, and steeringarms.8. Apply grease to grease fittings. Grease spindle bushingsregularly to ensure long bushing life.9. Perform front end alignment.。
IEEEStd
IEEEStdIEEE Std C57.12.31-2002 IEEE standard for pole mounted equipment - enclosure integrity.pdf│ IEEE Std C57.12.31-2002 Pole-Mounted Equipment Enc losure Integrity.pdf│ IEEE Std C57.12.32-2002 IEEE standard for submersible equipment - enclosure integrity.pdf│ IEEE Std C57.12.32-2002 Submersible Equipment Enclosure Integrity.pdf│ IEEE Std C57.12.34-2004 IEEE standard requirements for pad-mounted, compartmental-type, self-cooled, three-phase distributio.pdf│ IEEE Std C57.12.35-1996 Standard for Bar Coding for Distribution Transformers.pdf│ IEEE Std C57.12.44-2000 Standard Requirements for Secondary Network Protectors.pdf │ IEEE Std C57.12.58-1991 Guide for Conducting V oltage Analysis of a Dry-Type Transformer Coil .pdf│ IEEE S td C57.12.59-2001 Guide for Dry-Type Transformer Through-Fault Current Duration.pdf│ IEEE Std C57.12.59-2001 IEEE guide for dry-type transformer through-fault current duration.pdf│ IEEE Std C57.12.60-1998 Guide Test Procedures for Thermal Evaluation of Insulation Systems.pdf│ IEEE Std C57.12.60-1998 IEEE guide for test procedures for thermal evaluation of insulation systems for solid-cast and resin.pdf│ IEEE Std C57.12.70-2000 Standard Terminal Markings for Distribution and Power Transformers.pdf│ IEEE Std C57.12.80-2002 Standard Terminology for Power and Distribution Transformers.pdf│ IEEE Std C57.12.90-1993 Liquid-Immersed Distribution, Power, and Regulating Transformers and Guide for Short-Circuit Testing.pdf│ IEEE Std C57.12.91-2001 Standard Test Code for Dry-Type Power Transformers.pdf│ IEEE Std C57.13-1993 Standard Requirements for Instrument Transformers.pdf│ IEEE Std C57.13.2-2005 IEEE Std. C57.13.2 - 2005 IEEE Standard Conformance Test Procedure for Instrument Transformers.pdf.pdf│ IEEE Std C57.131-1995 IEEE standard requirements for load tap changers.pdf│ IEEE Std C57.134-2000 IEEE guide for determination of hottest-spot temperature in dry-type transformers.pdf │ IEEE Std C57.135-2001 C57.135 IEEE Guide for the Application, Specification, and T esting of Phase-Shifting transformers.pdf.pdf│ IEEE Std C57.136-2000 IEEE guide for sound level abatement and etermination for liquid-immersed power transformers and shunt.pdf│ IEEE Std C57.144-2004 IEEE Std C57.144 - 2004 - IEEE Guide for Metric Conversion of Transformer Standards.pdf│ IEEE Std C57.146-2005 IEEE Std C57.146 2005.pdf│ IEEE Std C57.15-1999 IEEE standard requirements, terminology, and test code for step-voltage regulators.pdf │ I EEE Std C57.15-1999 Standard Requirements Terminology for Step-V oltage Regulators.pdf│ IEEE Std C57.18-10-1998 IEEE standard practices andrequirements for semiconductorpower rectifier transformers.pdf│ IEEE Std C57.18.10-1998 Standard Requirements for Semiconductor Power Rectifier Transformers.pdf│ IEEE Std C57.19.00-1991 General Requirements and Test for Outdoor Power Apparatus Bushings.pdf│ IEEE Std C57.19.01-1991 IEEE standard performance characteristics and dimensions for outdoor apparatus bushings.pdf│ IEEE Std C57.19.01-2000 Standard Performance Characteristics for Outdoor Apparatus Bushings.pdf│ IEEE Std C57.19.03-1997 Standard Requirements for Bushings for DC Applications.pdf │ IEEE Std C57.19.100-1995 Guide for Application of Power Apparatus Bushings .pdf │ IEEE Std C57.19.100-1995 IEEE guide for application of power apparatus bushings.pdf │ IEEE Std C57.19.101 IEEE trial-use guide for loading power apparatus bushings.pdf │ IEEE Std C57.21-1990 IEEE standard requirements, terminology, and test code for shunt reactors rated over 500 kV A.pdf│ IEEE Std C57.21-1990 Standard Requirements Shunt Reactors Rated Over 500 kV A.pdf│ IEEE Std C57.91-1995 Guide for Loading Mineral-Oil-Immersed Transformers.pdf│ IEEE Std C57.91-1995 IEEE guide for loading mineral-oil-immersed transformers.pdf│ IEEE Std C57.91-1995_Cor 1-2002 C57.91-1995_Cor 1-2002 IEEE guide for loading mineral-oil- immersed transformers corrigendum.pdf│ IEEE Std C57.93-1995 Guide for Installation of Liquid-Immersed Power Transformers.pdf│ IEEE Std C57.93-1995 IEEE Guide for Installation of Liquid-immersed Power Transformers.pdf│ IEEE Std C57.96-1999 IEEE guide for loading dry-type distribution and power transformers .pdf│ IEEE Std C57.98-1993 Guide for Transformer Impulse Tests Corrections.pdf│ IEEE Std C57.98-1993 IEEE guide for transformer impulse tests.pdf│ IEEE Std C62.1-1989 IEEE standard for gapped silicon-carbide surge arresters for AC power circuits.pdf│ IEEE Std C62.1-1989 Standard for Carbide Surge Arresters for AC Power Circuits.pdf│ IEEE Std C62.11-1993 IEEE standard for metal-oxide surge arresters for alternating current power circuits.pdf│ IEEE Std C62.11-1999 IEEE standard for metal-oxide surge arresters for AC power circuits (- 1kV).pdf│ IEEE Std C62.11-1999 Standard for Metal-Oxide Surge Arresters for AC Power Circuits.pdf│ IEEE Std C62.11-2005 (Revision of IEEE Std C62.11-1999) IEEE Standard for Metal-Oxide Surge Arresters for AC Power Circuits .pdf│ IEEE Std C62.21-1995 Application Guide for Surge Protection Equipment.pdf│ IEEE Std C62.21-2003 IEEE Guide for the Application of Surge V oltage Protective Equipment on AC Rotating Machinery 1000 V an.pdf│ IEEE Std C62.22-1991 IEEE guide for the application of metal-oxide surge arresters for alternating-current systems.pdf │ IEEE Std C62.22-1997 IEEE guide for the application ofmetal-oxide surge arresters for alternating-current systems.pdf │ IEEE Std C62.23-1995 Application Guide for Surge Protection of Electric Generating Plants.pdf│ IEEE Std C62.23-1995 IEEE application guide for surge protection of electric generating plants.pdf│ IEEE Std C62.31-1987 Test Specifications for Gas-Tube Surge-Protective Devices.pdf│ IEEE Std C62.32-1981 Standard Test Specifications for Low-V oltage Air Gap Surge-Protective Devices.pdf│ IEEE Std C62.32-2004 (Revision of IEEE Std C62.32-1981) IEEE Standard Test Methods for Low-V oltage Air Gap Surge-Protective .pdf│ IEEE Std C62.33-1982 IEEE standard test specifications for varistor surge-protective devices.pdf│ IEEE Std C62.33-1982 Standard Test Specifications for V aristor Surge-Protective Devices.pdf│ IEEE Std C62.34-1996 Standard for Performance of Low-V oltage Surge-Protective Devices.pdf│ IEEE Std C62.35-1987 IEEE standard test specifications for avalanche junction semiconductor surge protective devices.pdf │ IEEE Std C62.35-1987 Standard Test Specifications for Semiconductor Surge-Protective Devices.pdf│ IEEE Std C62.36-1991 IEEE standard test methods for surge protectors used in low-voltage data, communications, and signaling.pdf│ IEEE Std C62.36-2000 IEEE standard test methods for surge protectors used in low-voltage data, communications, and signaling.pdf│ IEEE Std C62.36-2000 Standard Test Methods for Surge Protectors Used in Low-V oltage Data.pdf│ IEEE Std C62.37-1996 IEEE standard test specification for thyristor diode surge protective devices.pdf│ IEEE Std C62.37-1996 Standard Test Specification for Thyristor Diode Surge Protective Devices.pdf│ IEEE Std C62.37.1-2000 Guide for the Application of Thyristor Surge Protective Devices.pdf│ IEEE Std C62.37.1-2000 IEEE guide for the application of thyristor surge protective devices.pdf│ IEEE Std C62.38-1994 Guide on Electrostatic Discharge.pdf │ IEEE Std C62.38-1994 IEEE guide on electrostatic discharge (ESD)- ESD withstand capability evaluation methods (for electroni.pdf│IEEE Std C62.41-1991 IEEE recommended practice on surge voltages in low-voltage AC power circuits.pdf│ IEEE Std C62.41.1-2002 IEEE Std. C62.41.1 - 2002.pdf│ IEEE Std C62.41.2-2002 Guide for the Application of Gas Tube and Air Gap Arrester Low-V oltage.pdf│ IEEE Std C62.41.2-2002 IEEE recommended practice on characterization of surges inlow-voltage (1000 V and less) AC power cir.pdf│ IEEE Std C62.42-1992 Guide for the Application of Gas Tube and Air Gap Arrester Low-V oltage.pdf│ IEEE Std C62.43-1999 Guide for the Application of Surge Protectors Used in Low-V oltage.pdf│ IEEE Std C62.43-2004 (Revision of IEEE Std C62.43-1999) IEEE guide for the application of surge protectors used in low-volta.pdf│ IEEE Std C62.45-1992 Guide on Surge Testing for Equipment Connected to Low-V oltage AC Power Circuits.pdf │ IEEE Std C62.45-1992 IEEE Guide on Surge Testing forEquipment Connected to Low-V oltage AC Power Circuits.pdf │ IEEE Std C62.45-2002 (Revision of IEEE Std C62.45-1992) IEEE Std. C62.45 - 2002.pdf │ IEEE Std C62.47-1992 IEEE guide on electrostatic discharge (ESD)- characterization of the ESD environment.pdf│ IEEE Std C62.48-1995 IEEE guide on interactions between power system disturbances and surge-protective devices.pdf │ IEEE Std C62.48-2005 (Revision of IEEE Std C62.48-1995) IEEE Guide on Interactions Between Power System Disturbances and Sur.pdf│ IEEE Std C62.62-2000 IEEE standard test specifications for surge-protective devices for low-voltage AC power circuits.pdf.pdf│ IEEE Std C62.62-2000 Test Specifications for Devices for Low-V olt AC Power Circuits.pdf│ IEEE Std C62.64-1997 IEEE standard specifications for surge protectors used in low-voltage data, communications, and signali.pdf│ IEEE Std C62.64-1997 Specifications for Surge Protectors Used in Low-V oltage Data.pdf │ IEEE Std C62.92-1989 Application of Neutral Grounding in Electrical Utility.pdf │ IEEE Std C62.92.1-1989 Application of Neutral Grounding in Electrical Utility Systems Part I.pdf│ IEEE Std C62.92.1-2000 IEEE guide for the application of neutral grounding in electrical utility systems - Part 1- introduct.pdf│ IEEE Std C62.92.2-1989 Application of Neutral Grounding in Electrical Utility Systems Part II.pdf│ IEEE St d C62.92.3-1993 Application of Neutral Grounding in Electrical Utility Systems Part III.pdf│ IEEE Std C62.92.3-1993 IEEE guide for the neutral grounding in electrical utility systems, Part III-Generator Auxiliary Sys.pdf│ IEEE S td C62.92.4-1991 Application of Neutral Grounding in Electrical Utility Systems Part IV.pdf│ IEEE Std C62.92.5-1992 Application of Neutral Grounding in Electrical Utility Systems Part V.pdf│ IEEE Std C62.92.5-1992 IEEE guide for the application of neutral grounding in electrical utility systems, part V - transmiss.pdf│ IEEE Std C95.1-1991 IEEE standard for safety levels with respect to human exposure to radio frequency electromagnetic fields, 3 kHz to 300 GHz.pdf│ IEEE Std C95.1-2005 (Revision of IEEE Std C95.1-1991) IEEE Std C95.1 - 2005 IEEE Standard for Safety Levels with Respect to .pdf│ IEEE Std C95.2-1999 IEEE standard for radio-frequency energy and current-flow symbols .pdf│ IEEE Std C95.2-1999 Radio-Frequency Energy and Current-Flow Symbols.pdf│ IEEE Std C95.3-1991 IEEE recommended practice for the measurement of potentially hazardous electromagnetic fields - RF and m.pdf│ IEEE Std C95.4-2002 IEEE Recommended Practice for Determining Safe Distances from Radio Frequency Transmitting Antennas When.pdf│ IEEE Std C95.6-2002 IEEE Standard for Safety Levels with Respect to Human Exposure to Electromagnetic Fields, 0-3 kHz.pdf.pdf│ IEEE Std No.177 Standard definitions and methods ofmeasurement for piezoelectr ic vibrators.pdf│ IEEE Std. 1215 - IEEE Guide for the Application of Separable Insulated Connectors.pdf │ IEEE-1021.rar│ IEEE.ANSI 1002-1987 Taxonomy for Software Engineering Standards.pdf│ IEEE.ANSI C37.36b-1990.pdf│ ieee1100-1999.pdf│ ieee1101.1-1998.pdf│ ieee987.pdf│ IEEE_ASTM SI 10-2002 (Revision of IEEE_ASTM SI 10-1997) IEEE_ASTM SI 10 - 2002.pdf│ IEEE_EIA12207.2-1997 Industry implementation of International Standard ISO_IEC 12207- 1995. (ISO_IEC 12207 standard for inf.pdf│ In-System Configuration of Programmable Devices, IEEE Standard on. IEEE Standard for In-System Configuration of Programmable.pdf│ ISO_IEEE 11073-10101-2004(E) Health informatics - Point-of-care medical device communication - Part 10101- Nomenclature.pdf.pdf│ ISO_IEEE 11073-10201-2004(E) Health informatics - Point-of-care medical device communication - Part 10201- Domain informatio.pdf│ ISO_IEEE 11073-20101-2004(E) Health informatics - Point-of-care medical device communication - Part 20101- Application profi.pdf│ ISO_IEEE 11073-30300-2004(E) Health informatics - Point-of-care medical device communication - Part 30300- Transport profile.pdf│ std 112-2004.pdf│ std 1410-2004.pdf│ std 1528-2003.pdf│ s td 1531-2003.pdf │ std 1625-2004.pdf│ std 323-2003.pdf│ std 98-2002.pdf│ std c37.104-2002.pdf │ std c37.23-2003.pdf │ std c62.41.1-2002.pdf │ std c62.41.2-2002.pdf。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB+ o T + ‹ _ <4 ˚ B B+1u© ABB Components - 1Transformer400 kV Transmission substation130 kV40-70 kV© ABB Components - 2Meter cubicle Service cable Main substation 400 V Feeder cableSecondary substation10 kVDistribution substationLudvika - ABB,XEgG!+ ,XEgG!+• 1900 • 2600 • • HVDC •b Æ,„ ‹ _< 2ˇ4‡ ‹+ 0›4 ˚© ABB Components - 3© ABB Components - 4HV BushingsBushing Fundamentals© ABB Components - 5+1u— ’+ #52 - 1000 kV 0.8 - 25 kA© ABB Components - 6GISA A¯© ABB Components - 736 - 550 kV(Fª)œ*¸4–4 $,X" #L#Æ4 36 – 1000 kV© ABB Components - 8, " -0N!Ł _ 0N!ŁU1000(kV)550300 245GOEGOM170 123 52© ABB Components - 9GSA GOB GOA1250 1100 1600 2000 2500 5000 1000036GOH25000I (A)© ABB Components - 10© ABB Components - 11© ABB Components - 12© ABB Components - 13© ABB Components - 14© ABB Components - 15© ABB Components - 16© ABB Components - 17© ABB Components - 18© ABB Components - 19© ABB Components - 20© ABB Components - 21© ABB Components - 22© ABB Components - 23© ABB Components - 24© ABB Components - 25LI, kV 35001050 750 200 800 1250 1600© ABB Components - 263150 500025000 I, A– ABB(M ,X (Mª2ˇ4‡,X(M&© ABB Components - 27© ABB Components - 28© ABB Components - 29/ g , ˚,X© ABB Components - 30© ABB Components - 31© ABB Components - 32© ABB Components - 33© ABB Components - 34© ABB Components - 35© ABB Components - 36tan δ ´Bushings, miscellaneous© ABB Components - 37iciδP = u ⋅ i ⋅tanδ i = 2⋅π⋅ f ⋅C ⋅uloss CC1P = 2 ⋅ π ⋅ f ⋅ C ⋅ u ⋅ tanδ2 loss 1© ABB Components - 38iR = iC ⋅tanδuDielectric losses IIOccur if an insulation material is subject to an A.C. voltage Mainly dependent on the moisture level and contamination in the paper Losses increasing with voltage, indicates bad insulation Increased losses during service indicates aging of the dielectric or moisture contamination Measured by different types of bridges© ABB Components - 39Dielectric losses IIIP = 2 ⋅ π ⋅ f ⋅ C ⋅ u ⋅ tanδ2 loss 1GOB 250 Ohmic 54 W Dielectric 0.2 W Total Ohmic + Dielectric 54.2 W Dielectric / total 0.4 %© ABB Components - 40GOE 2550 582 W 161 W 743 W 22 %Dielectric losses IVProcedure and process important Quality control Pure material Low moisture level Relationships between the dissipation factor and temperature, for different levels of moisture (shown in the graph)10 Dissipation factor versus temp. and moisture content.Proven design of condenser coreDissipation factor (%) 10,1 20 30 40 50 60 70 80 90 Temperature (C) moist:4 % moist:1 % moist:0.4-0.6 % moist:0.1-0.3 %© ABB Components - 41RIP-bushings with silicone insulators© ABB Components - 42Manufacturing process© ABB Components - 43RIP- bushingsEasy to installLightweight, less than 50% of OIP Transported, stored and installed at any angle Can be energised immediately after installationReliablePartial discharge free Low power factor Mechanically rigid design© ABB Components - 44High seismic withstandSilicone InsulatorsLow maintenance costsHydrophobic surface Reduced leakage currents Longer insulator cleaning intervals compared to porcelain© ABB Components - 45RIP-RobustnessHigh personal safetyMechanically rigid design High seismic withstand Non-shattering silicon insulator Non-flammable Self extinguishing when exposed to open fire© ABB Components - 46© ABB Components - 47。