AVR模拟PT2262仿真
PT2262_PT2272的多通道硬件控制方法

级联方式组成译码器原则和编码器级联方式相似, 同 名 数 据 输 入 端 相 连 作 为 低 位 数 据 输 入 端 ,高 位 数 据 从 选 通 端 输 入 ,保 证 每 次 只 有 一 片 工 作 ,其 余 都 被 禁 止 。
根据输出端口数需 要 8 个 芯 片,但 输 入 线 不 够,所 以 再 加 一 片 译 码 器 对 高 三 位 译 码 ,其 8 个 输 出 端 分 别 控 制 其 余 8 片 译 码 器 的 使 能 端 ,选 择 其 中 的 一 片 工 作 。 这 样,A3A4A5 输 入 引 脚 由 74LS138(8)通 过 译 码 控 制 了 其他 8 片 74LS138 的 输 出,实 现 了 4-64 位 的 译 码 工 作 。 [4] 2.2 PT2262/PT2272 多 路 硬 件 控 制 电 路 的 设 计
2 编码器和译码器对 PT2262/PT2272的硬件控制
2.1 编 码 器 和 译 码 器 的 设 计 由于目 前 还 没 有 64-6 路 编 码 器 和 6-64 路 译 码 器
芯 片 ,因 此 ,需 要 用 74LS148 和 74LS138 通 过 级 联 方 式 实现。
9片74LS148和9片 74LS138 级 联 方 式 可 以 分 别 组成 64-6 路 编 码 器 和 6-64 路 译 码 器,如 图 3,图 4 所示。
号。8片编码器的 GS 信 号 分 别 接 入 74LS148(8)的 输 入信号,则 进 行 编 码 工 作 的 编 码 器 的 GS 信 号 通 过 74LS148(8)再次进行编码,其结果作为 A3A4A5信号。 例如:输入I63=0,则74LS148(7)工作输出 A2A1A0= 000,GS=0,则 A2A1A0=000;74LS148(8)的 输 入 I7=0,由 于 EI=0,所 以 A5A4A3=000。 即 用 9 片 74LS148 实 现 了 64-4 的 编 码 器 设 计 。
PT2262PT2272编解码集成电路原理说明
PT2262PT2272编解码集成电路原理说明编解码集成电路是一种用于无线遥控器控制系统的集成电路,其中PT2262是编码器,PT2272是解码器。
编码器将输入的数据编码成一串二进制数据,而解码器将接收的数据解码成原始数据。
这种编解码器组合广泛应用于门禁系统、遥控器、汽车防盗系统等领域。
PT2262编码器的工作原理是将输入的数据通过编码算法转换成一串二进制数据,并通过无线信号发送出去。
编码器通常包含多路编码输入端口,可以接收多个控制信号,并将它们组合成一个二进制数据包。
这样的设计可以实现多功能遥控器,每个按键对应一个不同的编码输出。
PT2272解码器的工作原理是接收来自编码器的二进制数据包,并解码成原始数据信号输出。
解码器通常包含一个接收端口和多个输出端口,每个输出端口对应一个控制信号。
解码器内置了解码算法,可以准确还原编码器端输入的控制信号。
PT2262编码器和PT2272解码器之间配合使用时,可以实现无线遥控器控制系统的功能。
用户通过按下遥控器上的按键发送控制信号,编码器将该信号编码成二进制数据并发送给解码器,解码器将接收到的数据解码成原始控制信号输出。
这样就可以实现通过无线信号控制门禁系统、汽车防盗系统等设备的功能。
编解码集成电路具有体积小、功耗低、成本低等优点,适合用于需要远距离无线控制的应用场景。
PT2262和PT2272是一对经典的编解码器芯片,广泛应用于消费电子产品、工业自动化领域等。
通过学习这些编解码集成电路的原理,可以帮助我们深入理解遥控器控制系统的工作原理,并且可以在实际应用中对其进行合理的设计和使用。
总的来说,PT2262编码器和PT2272解码器的原理是基于数字信号处理技术,实现了数字信号的编解码转换,从而实现了远距离无线遥控系统的功能。
这两款集成电路有着简单易用、稳定可靠的特点,是无线遥控器领域的重要组成部分。
通过学习和应用这些编解码集成电路,可以提高我们对遥控器控制系统的理解和设计水平,带动无线通信和控制技本的发展。
PT2262PT2272编解码集成电路原理说明

PT2262PT2272编解码集成电路原理说明PT2262是编码器,PT2272是解码器,它们共同组成了无线遥控系统。
编码器负责将输入的数据编码成一串特定的信号,解码器则负责接收并解码这个信号,将其转化为相应的输出信号。
编码器和解码器之间通过无线传输介质进行通信。
PT2262编码器的工作原理如下:首先,通过输入信号进行编码,生成一个固定长度的编码码字。
编码过程中,PT2262内部实际上是将输入信号进行等宽编码,分别对应不同的输出信号。
这些输出信号通过设置不同的电平(高电平或低电平)来表示不同的编码。
编码器一般具有多个输出引脚,每个引脚对应一个编码码字,以实现对不同功能的控制。
最后,编码器将编码码字转换成无线信号,并通过外置的射频发射电路进行发送。
PT2272解码器是编码器的反向操作,其工作原理如下:首先,PT2272接收到来自编码器的无线信号。
然后,解码器根据接收到的无线信号,将其解码成相应的编码码字。
解码的过程中,PT2272内部会自动识别和校验接收到的信号,以确保解码的正确性。
最后,解码器将解码出的编码码字转换成相应的输出信号,并通过输出引脚进行输出。
PT2262和PT2272的组合可实现无线遥控系统的功能。
通过编码器将输入信号编码成无线信号后,传送到解码器进行解码,并最终通过解码器的输出信号对外部设备进行控制。
这种无线遥控系统具有简单、便捷、灵活的特点,被广泛应用于各种领域。
总结起来,PT2262和PT2272是一对用于无线遥控的编解码集成电路。
编码器PT2262将输入信号编码成无线信号,解码器PT2272接收并解码无线信号,将其转换为相应的输出信号。
它们可以组合使用,实现无线遥控系统的功能。
单片机模拟PT2262编码,软件模拟PT2262发射
单片机模拟PT2262编码,软件模拟PT2262发射发布者:aoyux 发布时间:2010-8-27 8:08:12 阅读:3次在无线遥控领域, PT2262/2272 是目前最常用的芯片之一,但由于芯片要求配对使用,在很大程度上影响了该芯片的使用,我们从 PT2262 波形特征入手,结合应用实际,提出软件解码/编码的方法和具体措施。
关键词 PT2262 软件解码/编码一、概述PT2262/2272 是一种 CMOS 工艺制造的低功耗低价位通用编解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。
PT2262/2272 最多可有 12 位 (A0-A11) 三态地址端管脚 ( 悬空 , 接高电平 , 接低电平 ), 任意组合可提供531441 地址码 ,PT2262 最多可有 6 位 (D0-D5) 数据端管脚 , 设定的地址码和数据码从 17 脚串行输出。
PT2262/2272 必须用相同地址码配对使用,当需要增加一个通讯机时,用户不得不求助于技术人员或厂家来设置相同地址码,客户自己设置相对比较麻烦,尤其对不懂电子的人来说。
随着人们对操作的要求越来越高,PT2262/2272 的这种配对使用严重制约着使用的方便性,人们不断地要求使用一种无须请教专业人士,无须使用特殊工具,任何人都可以操作的方便的手段来弥补 PT2262/2272 的缺陷,这就是 PT2262 软件解码/编码。
二、解码/编码原理振荡频率f=2*1000*16/Rosc(k Ω ) kHz 其中 Rosc 为振荡电阻这里我们选用的是一种比较常用的频率 f ≈ 10 kHz, Rosc=3.3M Ω(以下同)。
下图是振荡频率与码位波形的对应关系:PT2262 有三种编码: 0 , 1 ,和悬空 ( 表示为 f) 。
有了以上具体的波形,我们就可以进行软件编码了。
PT2262每次至少发送4次编码,首先我们把地址码+数据码+11ms宽度的同步码头发射出去,作个循环4次后结束。
用单片机模拟PT2262

用单片机模拟PT2262/2272解码的方法51单片机模拟PT2272软件解码设计方法在无线遥控领域,PT2262/2272是目前最常用的芯片之一,但由于芯片要求配对使用,在很大程度上影响了该芯片的使用,笔者从PT2262波形特征入手,结合应用实际,提出软件解码的方法和具体措施。
一、概述PT2262/2272是一种CMOS工艺制造的低功耗低价位通用编解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。
PT2262/2272最多可有12位(A0-A11)三态地址端管脚(悬空,接高电平,接低电平),任意组合可提供531441地址码,PT2262最多可有6位(D0-D5)数据端管脚,设定的地址码和数据码从17脚串行输出。
PT2262/2272必须用相同地址码配对使用,当需要增加一个通讯机时,用户不得不求助于技术人员或厂家来设置相同地址码,客户自己设置相对比较麻烦,尤其对不懂电子的人来说。
随着人们对操作的要求越来越高,PT2262/2272的这种配对使用严重制约着使用的方便性,人们不断地要求使用一种无须请教专业人士,无须使用特殊工具,任何人都可以操作的方便的手段来弥补PT2262/2272的缺陷,这就是PT2262软件解码。
二、解码原理上面是PT2262的一段波形,可以看到一组一组的字码,每组字码之间有同步码隔开,所以我们如果用单片机软件解码时,程序只要判断出同步码,然后对后面的字码进行脉冲宽度识别即可。
2262每次发射时至少发射4组字码,2272只有在连续两次检测到相同的地址码加数据码时才会把数据码中的“1”驱动相应的数据输出端为高电平和驱动VT端同步为高电平。
因为无线发射的特点,第一组字码非常容易受零电平干扰,往往会产生误码,所以程序可以丢弃处理。
下面我们来仔细看一下PT2262的波形特征:振荡频率 f=2*1000*16/Rosc(kΩ) kHz 其中Rosc为振荡电阻这里我们选用的是一种比较常用的频率f≈10 kHz, Rosc=3.3MΩ(以下同)。
基于315m无线模块的PT2262-PT2272工作原理分析

基于315m无线模块的PT2262/PT2272工作原理分析315M无线模块参数介绍数据发射模块的工作频率为315M,采用声表谐振器SAW稳频,频率稳定度极高,当环境温度在-25~+85度之间变化时,频飘仅为3ppm/度。
特别适合多发一收无线遥控及数据传输系统。
声表谐振器的频率稳定度仅次于晶体,而一般的LC振荡器频率稳定度及一致性较差,即使采用高品质微调电容,温差变化及振动也很难保证已调好的频点不会发生偏移。
发射模块未设编码集成电路,而增加了一只数据调制三极管Q1,这种结构使得它可以方便地和其它固定编码电路、滚动码电路及单片机接口,而不必考虑编码电路的工作电压和输出幅度信号值的大小。
比如用PT2262或者SM5262等编码集成电路配接时,直接将它们的数据输出端第17脚接至数据模块的输入端即可。
数据模块具有较宽的工作电压范围3~12V,当电压变化时发射频率基本不变,和发射模块配套的接收模块无需任何调整就能稳定地接收。
当发射电压为3V时,空旷地传输距离约20~50米,发射功率较小,当电压5V时约100~200米,当电压9V时约300~500米,当发射电压为12V时,为最佳工作电压,具有较好的发射效果,发射电流约60毫安,空旷地传输距离700~800米,发射功率约500毫瓦。
当电压大于l2V时功耗增大,有效发射功率不再明显提高。
这套模块的特点是发射功率比较大,传输距离比较远,比较适合恶劣条件下进行通讯。
天线最好选用25厘米长的导线,远距离传输时最好能够竖立起来,因为无线电信号传输时收很多因素的影响,所以一般实用距离只有标称距离的一半甚至更少,这点需要开发时注意。
数据模块采用ASK方式调制,以降低功耗,当数据信号停止时发射电流降为零,数据信号与发射模块输入端可以用电阻或者直接连接而不能用电容耦合,否则发射模块将不能正常工作。
数据电平应接近数据模块的实际工作电压,以获得较高的调制效果。
发射模块最好能垂直安装在主板的边缘,应离开周围器件5mm以上,以免受分布参数影晌。
pt2262

PT2262简介PT2262是一种用于无线遥控系统的编码解码芯片。
它广泛应用于车库门遥控器、无线门铃、无线安全系统等领域。
PT2262可以将一个特定的输入信号编码成一个无线遥控信号,并通过无线传输进行远程控制。
编码原理PT2262的编码原理是使用一种特定的编码算法,将输入信号转换成一系列特定的脉冲序列。
这些脉冲序列会通过无线信号传输给解码器进行解码,从而实现远程控制的功能。
编码过程包括以下几个步骤:1.输入信号采样:输入信号可以是开关、按键等,PT2262通过采样将输入信号转换为数字信号。
2.编码器:PT2262使用编码器将数字信号编码为一个固定长度的脉冲序列。
编码器内部包含一个计数器,根据输入信号的状态进行计数,当计数到达一定阈值时,编码器会输出一个脉冲信号。
3.脉冲宽度编码:PT2262使用脉冲宽度编码技术,通过改变脉冲的宽度来实现不同的编码。
当输入信号为高电平时,编码器输出的脉冲宽度较长;当输入信号为低电平时,编码器输出的脉冲宽度较短。
4.数据输出:编码器将编码后的脉冲序列发送给遥控器的调制器,由调制器将其转换成无线信号进行传输。
解码原理PT2262的解码原理是使用一种特定的解码算法,将接收到的无线信号转换为数字信号进行解码。
解码过程包括以下几个步骤:1.信号接收:遥控器的接收器接收到无线信号后,将其转换为电压信号。
2.调解制:PT2262的解码器接收到电压信号后,通过调解制将电压信号转换为数字信号。
调解制是PT2262的内部电路,根据电压信号的变化进行调解。
3.解码器:解码器接收到调解制输出的数字信号后,通过解码算法将其解码为相应的功能信号。
4.输出信号:解码器将解码后的信号输出给要控制的设备,实现远程控制的功能。
应用领域PT2262广泛应用于无线遥控系统领域,包括但不限于以下几个方面:1.车库门遥控器:PT2262可以将车库门的开关信号编码成无线遥控信号,通过无线方式进行车库门的开关控制。
51系列单片机仿真PT2262编码芯片的应用

tm =e > ( -)2;将 待 发 射 的两 位 移 到 最低 e p tmp >( j )/ 7 /
t mp = ; e & 3
3 仿真 P 2 6 T 2 2的 C 语 言 程序 清 单
# n ld i c u e< e 5 . r g 2h>
itmp = ) 2 6 _ O / fe = O p 2 2 0 ; / ( es ( mp = ) 2 6 — 0 l it = 1 p 2 2 1; e fe
一
np 0 o一 ; hp 0 o一;
) }
p 2 2 2 6
_
d l (0; ea 5 ) y
P2 6 =0 2 2 ;
0/ 0/ 发射 0函数
d l (6 0; ea 16 ) y
{
P 2 2 1 ea(0; 2 6 = ; ly5) d P 2 2 0 ea(6 ) 26 = ; l 10; d y
1 2 2 1 ea(o; 7 6= ; l 5) 2 d y
P 2 2 Od ly 1o : 2 6 = ;ea (6 1
ma 0 i n
( un i; itJ
P 2 2 0 2 6 = ;
}
p 2 2 2 6
一
l/ 射 1函数 O/ 发
{
P 2 2 1 ea(6 ) 2 6 = ; ly10; d P 2 2 0dly5) 2 6 = ;e (0; a P 2 2 ;e y1O; 2 6=1 l (6 ) d P 2 2 0dly5) 2 6= ;e (0; a
科技信 息
0机械 与电子o
S IN E&T C N L GYI F MA I CE C EHOO N OR TON
PT22622272仿真程序

//
参数说明:
/*
脉宽参数从50到610us,每个值对应一个窄脉冲宽度,即如下图一个“地址码0”的1/8宽度。
地址码初始值为0000 ffff,键值码为1000,可以修改,脉冲宽度初始为333us。
|~|_______________________________|~~~|_|~~~|_|~|___|~|___|....重复....键值码
MOV 32H,A
MOV P3,#0FFH
MOV R7,32H
ACALL L0171
//按下移动键和修改键修改搜索的起始地址、脉冲宽度、循环脉宽搜索、搜索间隔时间。
//按下搜索键,显示go,开始搜索,此时进入正在搜索状态,一旦听到接收机发出搜索成功的信号,
//按下停止搜索键(设置键),则在该位置停止搜索,显示stop,
//然后调整搜索时间更大一点,方向反向,继续搜索
//再次听到搜索成功的信号,继续本步骤,获得数据。
/*
键盘接口,共4个按键,
P30: 光标移动
P31:数值修改
P32:功能设置 2272与2262功能与搜索功能之间切换,
搜索状态下,正在搜索时,有暂停搜索的功能,
非搜索时,可以在2272,2262与搜索状态间切换
P33:发射/接收/开始搜索
显示接口:
P2口与P1.5 P1.6 P1.7口 lcm1602
MOV 39H,R7
MOV A,39H
XRL A,#88H
JNZ L0009
XRL A,#88H
JNZ L0009
MOV R7,39H
ACALL L0158
L0003: MOV A,25H
pt2262 2272 编码器
无线数据传输广泛地运用在车辆监控、遥控、遥测、小型无线网络、无线抄表、门禁系统、小区传呼、工业数据采集系统、无线标签、身份识别、非接触RF智能卡、小型无线数据终端、安全防火系统、无线遥控系统、生物信号采集、水文气象监控、机器人控制、无线232 数据通信、无线485/422数据通信、数字音频、数字图像传输等领域中。
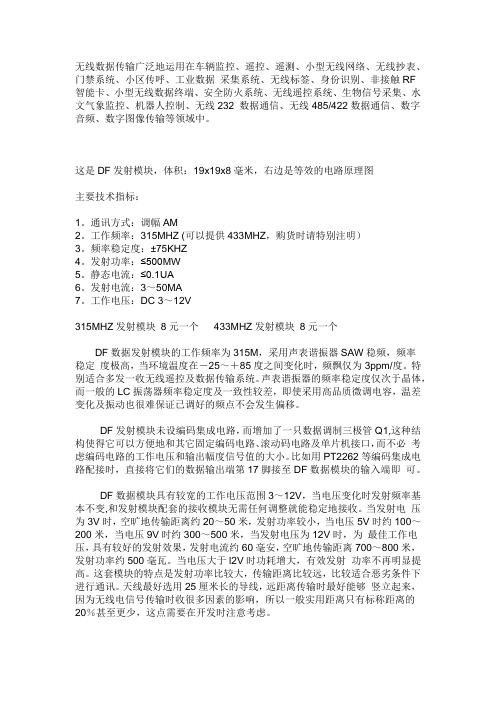
这是DF发射模块,体积:19x19x8毫米,右边是等效的电路原理图主要技术指标:1。
通讯方式:调幅AM2。
工作频率:315MHZ (可以提供433MHZ,购货时请特别注明)3。
频率稳定度:±75KHZ4。
发射功率:≤500MW5。
静态电流:≤0.1UA6。
发射电流:3~50MA7。
工作电压:DC 3~12V315MHZ发射模块8元一个433MHZ发射模块8元一个DF数据发射模块的工作频率为315M,采用声表谐振器SAW稳频,频率稳定度极高,当环境温度在-25~+85度之间变化时,频飘仅为3ppm/度。
特别适合多发一收无线遥控及数据传输系统。
声表谐振器的频率稳定度仅次于晶体,而一般的LC振荡器频率稳定度及一致性较差,即使采用高品质微调电容,温差变化及振动也很难保证已调好的频点不会发生偏移。
DF发射模块未设编码集成电路,而增加了一只数据调制三极管Q1,这种结构使得它可以方便地和其它固定编码电路、滚动码电路及单片机接口,而不必考虑编码电路的工作电压和输出幅度信号值的大小。
比如用PT2262等编码集成电路配接时,直接将它们的数据输出端第17脚接至DF数据模块的输入端即可。
DF数据模块具有较宽的工作电压范围3~12V,当电压变化时发射频率基本不变,和发射模块配套的接收模块无需任何调整就能稳定地接收。
当发射电压为3V时,空旷地传输距离约20~50米,发射功率较小,当电压5V时约100~200米,当电压9V时约300~500米,当发射电压为12V时,为最佳工作电压,具有较好的发射效果,发射电流约60毫安,空旷地传输距离700~800米,发射功率约500毫瓦。
基于STC单片机仿真PT2262编码芯片的应用_胡剑锋

的正脉冲。参见下图2:
图2 同步(Sync.)位波形
3 STC单片机仿PT2262与DF无线收发模块 接口
本文采用P1.4引脚仿真PT2262第17脚 输出编码信息,该引脚可直接连接到无线发 射模块的数据输入端。
4 仿真PT2262的C语言程序清单 #include <STC_NEW_8051a.H> //STC单片机头文件 #include <intrins.h> #define uint unsigned int #define uchar unsigned char
P2262=1;Delay80us(4); P2262=0;Delay80us(124); }
void p2262_8(unsigned char ch) // 发射8位PT2262编码
{ uchar temp; uint i; for(i=0;i<8;i++) { temp=ch; temp=temp>>(7-i); temp&=0x01; if(temp==0) p2262_0(); if(temp==1) p2262_1(); }
}
void fs_p2262(unsigned char light_addrH,unsigned char light_ addrL,unsigned char light_mode)
{ uint i; for(i=0;i<4;i++) //发送相同的4
组码 { p2262_syn(); //发送同步码 p2262_8(light_addrH);//发
DOI:10.3969/j.issn.1001-8972.2012.22.037
基于STC单片机仿真PT2262编码芯片的应用
基于PT2262的无线灯控设备设计实现
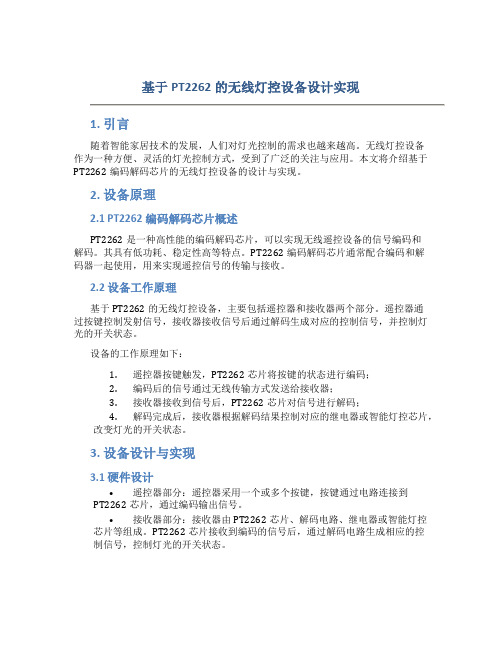
基于PT2262的无线灯控设备设计实现1. 引言随着智能家居技术的发展,人们对灯光控制的需求也越来越高。
无线灯控设备作为一种方便、灵活的灯光控制方式,受到了广泛的关注与应用。
本文将介绍基于PT2262编码解码芯片的无线灯控设备的设计与实现。
2. 设备原理2.1 PT2262编码解码芯片概述PT2262是一种高性能的编码解码芯片,可以实现无线遥控设备的信号编码和解码。
其具有低功耗、稳定性高等特点。
PT2262编码解码芯片通常配合编码和解码器一起使用,用来实现遥控信号的传输与接收。
2.2 设备工作原理基于PT2262的无线灯控设备,主要包括遥控器和接收器两个部分。
遥控器通过按键控制发射信号,接收器接收信号后通过解码生成对应的控制信号,并控制灯光的开关状态。
设备的工作原理如下:1.遥控器按键触发,PT2262芯片将按键的状态进行编码;2.编码后的信号通过无线传输方式发送给接收器;3.接收器接收到信号后,PT2262芯片对信号进行解码;4.解码完成后,接收器根据解码结果控制对应的继电器或智能灯控芯片,改变灯光的开关状态。
3. 设备设计与实现3.1 硬件设计•遥控器部分:遥控器采用一个或多个按键,按键通过电路连接到PT2262芯片,通过编码输出信号。
•接收器部分:接收器由PT2262芯片、解码电路、继电器或智能灯控芯片等组成。
PT2262芯片接收到编码的信号后,通过解码电路生成相应的控制信号,控制灯光的开关状态。
3.2 软件设计•遥控器软件设计:遥控器软件主要通过编程实现按键状态的检测,并将按键的状态编码输出。
•接收器软件设计:接收器软件主要通过编程实现PT2262芯片的信号接收与解码,根据解码结果控制灯光的开关状态。
4. 实验结果与讨论经过实际测试,基于PT2262的无线灯控设备能够实现灯光的远程控制。
遥控器通过按键触发,发送信号给接收器,接收器接收到信号后根据解码结果控制灯光的开关状态。
实验结果表明,设备的控制稳定性和可靠性较高。
(完整版)无线遥控模块PT2262控制原理

123*LJ 5Li 1111 11 9 L0 无线电遥控,就是利用无线电波对被控对象进行远距离控制,在工业控制、航空航天、冢电领域应用广泛。
一、无线遥控模块的构成:由发射部分和接收部分组成。
发射部分由,按键,编码芯片,315M 调制器,功率放大电路等构成其中编码部分电路由PT2262编码IC 来组成,具体电路见图所示SK 矗同接收部分由无线信号接收电路,解码芯片构成触发信号一FT2262编码一315MHz®制器一尊功率抜大—\编码输出接收头mmD0,D1,D2,D3为按键状态输出端,当某个按键按下后,相应的数据端口就输出高电平,在这几个端口加一级放大就可以驱动继电器,功率三极管,进行负载遥控开关控制。
也可以直接连到单片机的I/O脚上,通过单片机采集数据端口状态,然后进行外部控制。
二、编码解码芯片PT2262/PT2272PT2262/2272是一对带地址、数据编码功能的无线遥控发射/接收芯片。
其中发射芯片PT2262-IR将载波振荡器、编码器和发射单元集成于一身,使发射电路变得非常简洁。
接收芯片PT2272的数据输出位根据其后缀不同而不同,数据输出具有暂存”和锁存”两种方式,方便用户使用。
后缀为“M为暂存型” 后缀为“为锁存型”其数据输出又分为0、2、4、6不同的输出,例如:PT2272-M4则表示数据输出为4位的暂存型无线遥控接收芯名称 管脚・ 说明DQ-DE 7-3. 10-1? 1 数据输入端,有一个为"1"即有編码发出,内部下拉,Vcc IB- 电源正端(+ )7ss- 0 电源负端〔-)TE 14 編科启动端’用于多数据的編码芨射,低电平有数OSCI 16- 振荡电阻输入端,与0兀2所接电阻决定振荡频率DSC2 15 标蒜电阻振茹器输由端Dout 17編码输出端(正常时为低电平)喪1:编诂电路PT2262管■知功能赛 名称管脚• 说明 M-A11 1-乳 10-19- 地址管脚,用于进行地址编码,可置为"0笃T 笃 W (悬空〉,必须与2262 一致,否则不幣码DO-DE 7-8, 10-13地址或数据管脚■当做为数据管脚时,只有在地址期与 2262 一致,数据管脚才能输岀与2262数据端对应的高 电平』否则输出为低电平,锁存型只有在接收到下一数 据才能转换 Vcc18 电源正端(+ ) Uss9 电源负端O ) DIN14 数据信号输入端,来自接收模块输出端* OSCI16- 振荡电阻输入端,与0咒2所接电阻决定振荡频率 0SC215 振汤电阻振霸器输出端 VT17 解码有效确认输出端(常低)解码有效变成高电平(瞬 态) 蔻N 解码电路PT2272 19營功能表在通常使用中,我们一般采用 8位地址码和4位数据码,这时编码芯片PT2262和解码芯片PT2272的第1〜8脚为地址设定脚,有三 种状ftO t 1 18J VCDAL 匚 2 H3 Bout 匚 3 1&2 QSCl 匚 4 153 DSC2 A4 L.5 14 J T E AS r £ 13 1 All .-'D5 Afe/DO 匚 ? 123 A L 0/D4 flTfDi 匚 8 11 2 A^/ia Wss 匚 9 10 3 JL8/I? 1 1 s 2 17 3 1& 4 15 5 14 G 13 T 12 5 11 3 VDD 1 VT 3 OSCI □ 0SC2 □ DIN □ D5 □ D4 J D3 J D2 El FT236Z-IREEC-LELru-c-L &12 ^04501 S A A A- A A D D sV OSCI OSC2AO Al A10/U4 A11/H5FT 226 2-1R 内部原理框圍态可供选择:悬空、接正电源、接地三种状态,地址编码不重复度为38=6561组,只有发射端PT2262和接收端PT2272的地址编码完全相同,才能配对使用,遥控模块的生产厂家为了便于生产管理,出厂时遥控模块的PT2262和PT2272的八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用户如果想改变地址编码,只要将PT2262和PT2272的1〜8脚设置相同即可,例如将发射机的PT2262 的第2脚接地,第3脚接正电源,其它引脚悬空,那么接收机的PT2272 只要也第2 脚接地,第3 脚接正电源,其它引脚悬空就能实现配对接收。
用单片机代替PT2272解码PT2262的程序
********** 用单片机代替PT2272解码PT2262的程序 **********晶振: 12MHz说明 ***********************************接收到的信号为发送信号的反码因为每检测到按键有效一次PT2262 都发送四次编码我们可以利用这一特点来解码先检测有没有接收到信息当有的时候我们就去掉第一次编码的信号检测5ms 的高电平来检测编码的开始信号接收到5ms 的高电平后才开始解码我们可以发现每个码的长度都是1.2ms左右每一个编码都是由低电平开始然后到高电平又到低电平又回到高电平我们从第一个高电平的宽度可以把1 码区分出来剩下的悬空码和0 码可以从第二个高电平的宽度区分出来具体的单片机译码方法如下由高电平开始检测到下降沿时就延时300us 读取接收的状态记为A0 然后再检测下一个下降沿降沿后又延时300us 读取接收的状态记为A1 这样就把一个编码给译出来了A0 A1 和悬空1 码0 码的关系如下:A0 A1 代码0 0 1 码0 1 错误1 0 悬空1 1 0 码********************************************************************* *********/#i nclude <STC516AD.H>#define uchar unsigned char#define uint unsigned int//定义共用体union{uint word;struct { //结构bytesuchar byte_addr;uchar byte_data;}bytes;}a_0,a_1;//位定义sbit W_REM =P3^3; //遥控接收输入脚sbit LED0 =P1^0;sbit LED2 =P1^2;bit bdata recv_flg, //接收正确位标志(1:正确 0:错误)//因为当按住PT2262的按键不放的时候PT2262会把编码不断的送出//设置lianji_flg位用来检测按键有没有放开过如果没有放开则不再响应lianji_flg; //按键没有放开过标志(1:连接 0:点击)uchar// addr_a0, //接收的8位地址编码A0// addr_a1, //接收的8位地址编码A1// data_a0, //接收的4位数据编码A0// data_a1, //接收的4位数据编码A1addr_user_a0, //设定的8位地址密码A0addr_user_a1; //设定的8位地址密码A1// led_out; //输出控制//------------------------------------- sub functon----------------------------------------------//------------------------------------- sub functon----------------------------------------------//------------------------------------- sub functon----------------------------------------------//------------------------------------- sub functon----------------------------------------------//------------------------------------- sub functon----------------------------------------------//>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>//void d1ms (uint ljh_in) /*1mS延时函数*///{// uint data ljh_i;// uchar data ljh_j;// for(ljh_i=0;ljh_i<ljh_in;ljh_i++){// for(ljh_j=0;ljh_j<108;ljh_j++){// _nop_(); _nop_();// _nop_(); _nop_();// _nop_(); _nop_();// }// }//}//<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-< -<-<-<-<-<-<-<-<-<-<-<//>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>void d50us(uchar n) //50uS延时{uchar data i,j;for(j=n;j;j--) { //[1T+2T+(2i+2)T+1T+2T]*n+1T+2T+2T=(2i+8)*n+5Tfor(i=21;i;i--) ;//延时2T+2T*i=(2i+2)T}}//<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-< -<-<-<-<-<-<-<-<-<-<-<//>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>PT2272_deco() //解码{uchar i,cnt;if(recv_flg) ;else {//清除上次解码内容cnt =12; //接收12位编码//解码------------------------------------------------------------------------//先找出接收码的开头即5ms左右的高电平----------------------------------//设置高电平时间为4~6ms//检测和等待4ms的高电平for(i=80;i;i--) { //延时4mSif(!W_REM) i=80;else d50us(1);}//等待在2ms内接收到的低电平--------------------------------------------for(i=40;i;i--) { //延时4mSif(!W_REM) break;else d50us(1);}//4ms到6ms内接收到下降沿则跳去解码否则返回//超出6ms接收错误返回if(i) {recv_flg =0; //清按键没有放开过标志goto PT2272_deco_exit; //返回 -------------------------------- }//等待300us后采集接收信号d50us(6);//采集接收信号并记录a_0.word=a_1.word=0;for(i=0;i<6;i++) {if(W_REM) {a_0.word |=0x01;}a_0.word <<=1;// MOV C,W_REM //读A0数据// MOV A,DATA_A0// RLC A// MOV DATA_A0,A //保存相应位的A0// MOV A,ADD_A0// RLC A// MOV ADD_A0,A //高位转移//等待第二个下降沿while(!W_REM) ;while(W_REM) ;// JNB W_REM,$// JB W_REM,$//等待300us后采集接收信号d50us(6);// MOV 40H,#150 //2T// DJNZ 40H,$ //2T 延时:2T+2T*150=302Tif(W_REM) {a_1.word |=0x01;}a_1.word <<=1;// MOV C,W_REM //读A1数据// MOV A,DATA_A1// RLC A// MOV DATA_A1,A //保存相应位的A1// MOV A,ADD_A1// RLC A// MOV ADD_A1,A //高位转移//等待第二个码值的下降沿while(!W_REM) ; //___wd___while(W_REM) LED2=~LED2;// JNB W_REM,$// JB W_REM,$// DJNZ 34H,REMOTE6 //接收12 位编码 -------------------------------- }//把接收的编码左移4位将8位密码放在同一字节上----------------------------a_0.word <<=4;a_1.word <<=4;// MOV 40H,#4//REMOTE7:// CLR C// MOV A,DATA_A0// RLC A //送出低8位的bit7// MOV DATA_A0,A //低8位的A0左移1位// MOV A,ADD_A0// RLC A //接收低8位的bit7// MOV ADD_A0,A //高8位的A0左移1位// CLR C// MOV A,DATA_A1// RLC A //送出低8位的bit7// MOV DATA_A1,A //低8位的A1左移1位// MOV A,ADD_A1// RLC A //接收低8位的bit7// MOV ADD_A1,A //高8位的A1左移1位// DJNZ 40H,REMOTE7 //左移4位// //把4位数据编码由高4位移到低4位上---------------------------------// MOV A,DATA_A0// SWAP A// MOV DATA_A0,A //把4位数据编码A0由高4位移到低4位?// MOV A,DATA_A1// SWAP A// MOV DATA_A1,A //把4位数据编码A1由高4位移到低4位?//比较密码--------------------------------------------------------------if((a_0.bytes.byte_addr==addr_user_a0)&&(a_1.bytes.byte_addr==addr_us er_a1)) {recv_flg =1;lianji_flg =1;} else {recv_flg =0;lianji_flg =0;}// MOV A,ADD_A0// XRL A,ADD_USER_A0// JNZ REMOTE8 //密码不正确则跳转//// MOV A,ADD_A1// XRL A,ADD_USER_A1// JNZ REMOTE8 //密码不正确则跳转// //置接收正确位---------------------------------------------------------// SETB RECEIVE// //置ENABLE 用于检测按键有没有放开 -------------------------------- // SETB ENABLE// RET //接收正确返回 -----------------------------------------//REMOTE8:// CLR ENABLE// CLR RECEIVE// RET //接收不正确返回 ---------------------------------------}PT2272_deco_exit:return;}//<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-< -<-<-<-<-<-<-<-<-<-<-<//>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>void remote_2272_deco() //接收遥控码(解码程序){uint i;//检测50ms内有没有编码接收for(i=1000;i;i--) {if(!W_REM) {PT2272_deco(); //解码break;}else d50us(1); //50uS延时}recv_flg =0; //清按键没有放开过标志}//<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-< -<-<-<-<-<-<-<-<-<-<-<//>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> >>>>>>>>>>>>>>>>>>>>>>void work() //控制输出 //把选中的LED取反{if(recv_flg) { //接收不正确,退出recv_flg=0; //清接收正确标志位a_0.bytes.byte_data =~a_0.bytes.byte_data;P1 =P1^a_0.bytes.byte_data;}//WORK:// JNB RECEIVE,WORK_END //接收不正确,退出// //每次按键都一次响应// CLR RECEIVE //清接收正确标志位// MOV A,DATA_A1// CPL A// ORL A,#0FH //屏蔽低4位// MOV DATA_A1,A// MOV A,LCD_OUT// XRL A,DATA_A1// ORL A,#0FH// MOV LCD_OUT,A// MOV P1,LCD_OUT// NOP//WORK_END:// RET// END}//<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-<-< -<-<-<-<-<-<-<-<-<-<-<// ==================================== main function============================================// ==================================== main function============================================// ==================================== main function============================================// ==================================== main function============================================// ==================================== main function============================================// ==================================== main function============================================void main (void){//上电初始化++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ P1 =0xff;P3 =0xff;for(addr_user_a1=100;addr_user_a1;addr_user_a1--) d50us(200); //50uS 延时//编码设定为:A0~A7地址编码为:悬空+++++++++++++++++++++++++++++++++++++++++++++addr_user_a0 =0xff;addr_user_a1 =0x00;//start://=================================================================== =============while(1) {remote_2272_deco(); //接收遥控码work(); //控制输出LED0 =!LED0;}}。
pt2262芯片使用手册

pt2262芯片使用手册PT2262芯片是一种用于遥控器的编码芯片。
它可以让我们轻松地实现对车辆、门禁等设备进行远程控制。
下面我们来详细了解一下这款芯片的使用手册。
首先,我们需要了解PT2262芯片的基本功能。
这款芯片具有12位地址码和4位数据码,可以实现4.5亿组不同的编码方式。
其输出为一组模拟信号,用于控制外部载波发射电路,从而实现对目标设备的远程控制。
接下来,我们需要了解PT2262芯片的管脚布局。
这款芯片一共有18个引脚,包括12个地址码输入引脚、4个数据码输入引脚、1个静态输出引脚和1个动态输出引脚。
其中,地址码输入引脚和数据码输入引脚需要连接到编码器。
在具体使用PT2262芯片时,我们需要按照以下步骤进行操作:1. 设置地址码和数据码。
地址码和数据码是由外部编码器产生的,可以根据需要进行设置。
如果需要修改地址码或数据码,需要在第一个电平输出前进行设置。
2. 对动态输出引脚进行设置。
动态输出引脚可以选择接地或高电平输出。
在接受者端需要对应设置,以便正确识别PT2262芯片的编码。
3. 将静态输出引脚连接到载波发射电路。
在收到合适的地址码和数据码时,静态输出引脚将输出高电平信号,从而控制载波发射电路。
需要注意的是,在使用PT2262芯片时,应该避免地址码和数据码重复。
否则,这会导致目标设备的混乱,从而无法正确控制。
此外,PT2262芯片还具有多个工作模式,包括调制、干扰抑制和消隐等。
在特定的应用场景下,可以使用这些功能来满足不同的需求。
最后,需要注意的是,PT2262芯片的输出距离和质量可能会受到外部干扰的影响。
因此,在实际使用时,应该尽量减少外部干扰,并进行必要的信号调整和优化,以确保远程控制的稳定性和可靠性。
以上就是PT2262芯片的基本使用手册。
希望这篇文章能够帮助大家更好地了解和应用这款芯片。
PT2262、PT2272更详细的应用

点击这里了解PT2262、PT2272更详细的应用100米四键遥控模块这是一种目前用途非常广泛的100米四键遥控模块,常用于报警器设防解防、车库门遥控、摩托车、汽车的防盗报警等,这类产品的用途要求遥控器的遥控距离并不远,一般20米足够了,但要求:遥控模块价格低廉,发射机手柄体积小巧、外观精致,耗电尽可能省,工作稳定可靠。
这是100米遥控器手柄,它曾经被用于别克汽车的防盗遥控上,所以也被成为别克款遥控器。
这种遥控手柄的体积非常小巧玲珑,可以很方便地象装饰品一样被挂在钥匙圈上,为了缩小体积,内部的编码芯片也是用宽体贴片的SC2262S编码芯片,电池也是用更小的A27遥控专用12伏小电池,发射天线也是内藏式的PCB天线,遥控手柄的防潮能力比较好,适用于遥控距离要求不太远的用途。
这是新款100米两键遥控手柄,可以提供样品或者批量订货。
这是新款的100米无天线四路遥控手柄,可以提供样品或者批量订货。
通常我们供货的100米别克款遥控手柄是黑色的卵形手柄的,面板符号为:开锁、闭锁、静音、响铃的这种,如果批量需要:闭锁、上升、下降、停的面板符号的需要定货。
批量定货还有一种红色外观的豪华型皮革手感的高档遥控手柄,根据客户喜好,还有一种蓝色两键的100米遥控器和腰圆形白色/深红色/棕黄色的100米遥控器可供选购.这几种遥控器的特点都是:发射电流小,电池使用超小的A27电池,不带天线,遥控距离适中,体积小巧.价格都相同.上图为发射器外形,面板上有四个不同图标的操纵按键及一个红色的发射指示灯。
发射机内部采用进口的声表谐振器稳频,产品一致性非常好,频率稳定度极高,工作频率为315MHZ,频率稳定度优于10-5,使用中无需任何调整,特别适合多发一收等无线电遥控系统使用。
而目前市场上的一些低价位无线电遥控模块一般仍采用LC振荡器,稳定度及一致性较差,即使采用高品质微调电容,当温度变化或者震动后也很难保证已调试好的频点不会发生偏移,造成发射距离缩短。
基于单片机的集成编码PT2262解码器设计.

基于单片机的集成编码PT2262解码器设计近年来,基于波形分析的软件解码或者软硬结合解码的方法被提出来。
但是,这些方法都不具有自学功能,只针对特定振荡频率的波形进行解码,当不知道发射电路PT2262的振荡电阻的配置的情况下无法解码,或者需要手工调整程序的参数。
本文提出了一种具有自学习功能的基于单片机的软件解码方法并完成了设计,这种新方法可以在未知发射电路的配置参数的情况下,通过先学习、后解码的过程实现解码,且可以实现自定义数据帧的格式,使编码的地址位和数据位的设置更加灵活。
从而可以将通用编码集成电路扩展应用于数据通信,智能控制等领域。
1 PT2262工作原理PT2262最多可有12位(A0~A11)三态地址端管脚(悬空,接高电平,接低电平)任意组合可提供531441种地址码。
最多可以有6位(D0~D5)数据位,设定的地址码和数据码与同步码组成数据帧以串行数据方式输出。
当PT2262和PT2272配对使用时,要求发端编码芯片FT2262的地址编码与收端解码芯片PT2272的地址编码相一致,而且振荡频率相匹配。
而发端向收端发送的指令等信息可编码在编码芯片的数据端,通过无线传送后,在解码芯片的数据端取出。
编码芯片PT2262发出的编码由地址码、数据码、同步码组成。
地址码和数据码都用宽度不同的脉冲来表示,两个窄脉冲表示“0”;两个宽脉冲表示“1”;一个窄脉冲和一个宽脉冲表示“f”(“悬空”)。
图1所示为PT2262编码格式图。
图中的T为时钟振荡周期的2倍,同步码低电平宽度是窄脉冲宽度的31倍。
2 硬件电路2.1 发射电路发射电路由PT2262编码器和无线发射模块组成,如图2所示。
当PT2262和无线发射模块同时上电时(这里用开关S1代替,实际使用中可以加入控制电路),设定的地址码和数据码与固定的同步码组成一组编码从17脚串行输出到315 MHz的无线数据发送模块。
振荡电阻Rosc用来调节编码发射频率,适当调高电路工作电源VCC可以增大发射距离。
基于STC单片机仿真PT2262编码芯片的应用
基于STC单片机仿真PT2262编码芯片的应用
胡剑锋
【期刊名称】《中国科技信息》
【年(卷),期】2012(000)022
【摘要】主要对市场上使用广泛的编码芯片PT2262开发出基于STC单片机的仿真编码程序.
【总页数】1页(P77)
【作者】胡剑锋
【作者单位】无锡商业职业技术学院信息工程学院,江苏无锡214000
【正文语种】中文
【相关文献】
1.51系列单片机仿真PT2262编码芯片的应用 [J], 张春宁
2.基于编码芯片PT2262实现的交叉路口语音提示装置 [J], 邱晶晶;刘小旻;赵立平;胡俊;赵元黎
3.一种针对PT2262编码芯片的编码软件设计 [J], 李从宏
4.PT2262编码芯片的内部电路分析及仿真 [J], 林金阳;黄世震;林伟;葛丽颖
5.红外遥控编码芯片pt2262软件解码的实现 [J], 石晶晶;李亚梅
因版权原因,仅展示原文概要,查看原文内容请购买。
3、PT2262遥控发射模块、PT2272遥控接收模块说明书V0.3
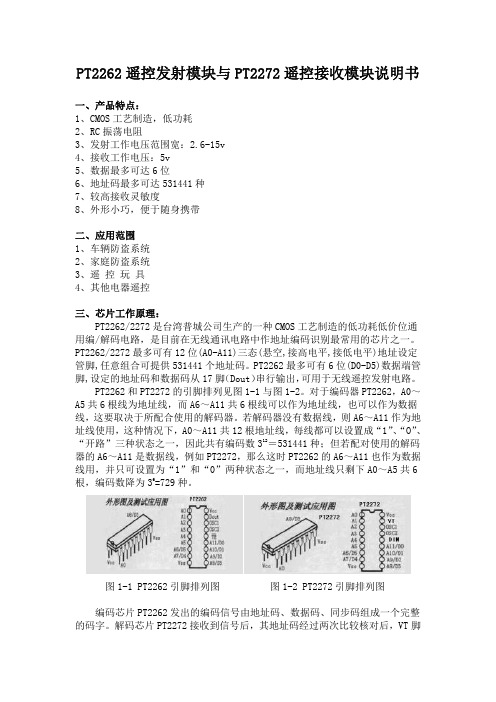
三、芯片工作原理: PT2262/2272 是台湾普城公司生产的一种 CMOS 工艺制造的低功耗低价位通
用编/解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。 PT2262/2272 最多可有 12 位(A0-A11)三态(悬空,接高电平,接低电平)地址设定 管脚,任意组合可提供 531441 个地址码。PT2262 最多可有 6 位(D0-D5)数据端管 脚,设定的地址码和数据码从 17 脚(Dout)串行输出,可用于无线遥控发射电路。
名称 D0-D5 Vcc Vss
TE OSC1 OSC2 Dout
表 1-1:编码电路 PT2262 管脚功能表
管脚
说明
7-8、10-13 数据输入端,有一个为“1”即有编码发出,内部下拉
18
电源正端(+)
9
电源负端(-)
14
编码启动端,用于多数据的编码发射,低电平有效
16
振荡电阻输入端,与 OSC2 所接电阻决定振荡频率
图 1-1 PT2262 引脚排列图
图 1-2 PT2272 引脚排列图
编码芯片 PT2262 发出的编码信号由地址码、数据码、同步码组成一个完整 的码字。解码芯片 PT2272 接收到信号后,其地址码经过两次比较核对后,VT 脚
才输出高电平,与此同时相应的数据脚也输出高电平。PT2262 每次发射时至少 发射 4 组字码,因为无线发射的特点,第一组字码非常容易受零电平干扰,往往 会产生误码,所以 2272 只有在连续两次检测到相同的地址码加数据码才会把数 据码中的“1”驱动相应的数据输出端为高电平和驱动 VT 端同步为高电平。当发 射机没有按键按下时,PT2262 不接通电源,其 17 脚为低电平,所以 315MHz 的 高频发射电路不工作,当有按键按下时,PT2262 得电工作,其第 17 脚输出经调 制的串行数据信号,当 17 脚为高电平期间 315MHz 的高频发射电路起振并发射等 幅高频信号,当 17 脚为低平期间 315MHz 的高频发射电路停止振荡,所以高频发 射电路完全受控于 PT2262 的 17 脚输出的数字信号,从而对高频电路完成幅度键 控(ASK 调制)相当于调制度为 100%的调幅。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AVR模拟PT2262编码程序(程序通过测试)作者:黄盈鑫文章来源:本站原创点击数:2536 更新时间:2006-3-16 10:53:10
/*机器人主程序中的测试程序,为了方便大家了解PT2262的编码方式没有把程序进行包装,有关PT2262的编码方式请查看PT2262的Datasheet
编译环境为CodeWizardAVR
*/
#include <mega8.h>
#include <Delay.h>
// Declare your global variables here
void main(void)
{
// Declare your local variables here
unsigned char count,counttime;
unsigned char codebuf[12];
// Port C initialization
// Func0=In Func1=In Func2=In Func3=In Func4=In Func5=In Func6=In Func7=In // State0=T State1=T State2=T State3=T State4=T State5=T State6=T State7=T PORTC=0x30;
DDRC=0x30;
codebuf[0]='f'; //地址码有需要的话在这里改动
codebuf[1]='f';
codebuf[2]='f';
codebuf[3]='f';
codebuf[4]='f';
codebuf[5]='f';
codebuf[6]='f';
codebuf[7]='f';
codebuf[8]=0; //信息码
codebuf[9]=0;
codebuf[10]=0;
codebuf[11]=0;
while (1)
{
// Place your code here
for(counttime=0;counttime<4;counttime++) //发射脚为PA0
{for(count=0;count<12;count++) //发射信息码
{if(codebuf[count]==1) //发射“1”
{PORTC.5 = 1;
#asm("cli")
delay_us(1200); //发射频率10KHZ,发射头之前,即a=100US PORTC.5 = 0;
delay_us(400);
PORTC.5 = 1;
delay_us(1200);
PORTC.5 = 0;
delay_us(400);
#asm("sei")
}
if(codebuf[count]==0) //发射“0”
{PORTC.5 = 1;
#asm("cli")
delay_us(400); //发射频率10KHZ,发射头之前,即a=100US PORTC.5 = 0;
delay_us(1200);
PORTC.5 = 1;
delay_us(400);
PORTC.5 = 0;
delay_us(1200);
#asm("sei")
}
if(codebuf[count]=='f') //发射“f”
{PORTC.5 = 1;
#asm("cli")
delay_us(400); //发射频率10KHZ,发射头之前,即a=100US PORTC.5 = 0;
delay_us(1200);
PORTC.5 = 1;
delay_us(1200);
PORTC.5 = 0;
delay_us(400);
#asm("sei")
}
}
PORTC.5 = 1; //发射同步头
#asm("cli")
delay_us(400);
PORTC.5 = 0;
delay_us(12400);
#asm("sei")
}
}; }。