C8051F系列单片机实现(7,4)汉明码的编码 毕业设计
基于单片机C8051F的智能温控系统的设计与实现
基于单片机C8051F的智能温控系统的设计与实现.txt“我羡慕内些老人羡慕他们手牵手一直走到最后。
━交话费的时候,才发现自己的话那么值钱。
·490·计算机测量与控制.2009.17(3)Computer Measurement & Control 控制技术中华测控网收稿日期:2008-07-27; 修回日期:2008-08-30。
基金项目:西北工业大学创新实验室资助项目(07031)作者简介:赵跃齐(1983-),在读研究生,主要从事计算机测控技术方向的研究。
马瑞卿(1963-),教授,博士,主要从事电机智能控制技术方向的研究。
文章编号:1671-4598(2009)03-0490-02 中图分类号:TP274·5文献标识码:A基于单片机C8051F的智能温控系统的设计与实现赵跃齐,马瑞卿,梁贵毅,曾重,梁波(西北工业大学自动化学院,陕西西安710072)摘要:随着自动化水平的不断提高,工业现场对温度的控制越来越高,设计了一种适用于现代工业现场的实时高精度温度监控系统;采用单片机C8051F020和PC机相结合,具有数据采集、数据显示、数据通信及数据存储等功能,通过RS485总线和上位机相连,上位机可以通过软件对系统进行设置和控制,系统同时通过液晶模块实时显示监测到的温度和万年历;试验证明,本系统具有一定的实时高精度性能,有着很强的推广价值。
关键词:单片机;智能温控;液晶模块;上位机Design and Realization of Intelligent Temperature Control SystemBased on C8051F MicrocontrollersZhao Yueqi, Ma Ruiqing, Liang Guiyi, Zeng Zhong, Liang Bo(Automation College, Northwestern Polytechnical University, Xi an 710072, China) Abstract:With the continuous improvement of automated level, the requirements for temperature control is more and more high in in-dustry scene. This article develops a temperature control system, which can suit to modern industry, use single chip computer C8051F020and personal computer together, have the functions of data acquisition, data display, data communication and data storage. implementedthrough RS485 connect to host conputer, the host computer can use software to control and setting the system , at the same time, the sys-tem can display the temperature and calendar by LCD module in time. The practical results has proved that this system has high precisionand worthy of using abroad.Key words:microcontrollers; intelligent temperature control; LCD module; host computer0 引言现代工业技术的自动化程度在不断提高。
(7,4)汉明码编译码系统设计.doc

南华大学电气工程学院《通信原理课程设计》任务书设计题目:(7, 4)汉明码编译码系统设计专业:通信工程学生姓名: 马勇学号:20114400236 起迄日期:2013 年12月20日~2014年1月3日指导教师:宁志刚副教授系主任:王彦教授《通信原理课程设计》任务书《通信原理课程设计》设计说明书格式一、纸张和页面要求A4纸打印;页边距要求如下:页边距上下各为2.5 厘米,左右边距各为2.5厘米;行间距取固定值(设置值为20磅);字符间距为默认值(缩放100%,间距:标准)。
二、说明书装订页码顺序(1)任务书 (2)论文正文 (3)参考文献,(4)附录三、课程设计说明书撰写格式见范例引言(黑体四号)☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆(首行缩进两个字,宋体小四号)1☆☆☆☆(黑体四号)正文……(首行缩进两个字,宋体小四号)1.1(空一格)☆☆☆☆☆☆(黑体小四号)正文……(首行缩进两个字,宋体小四号)1.2 ☆☆☆☆☆☆、☆☆☆正文……(首行缩进两个字,宋体小四号)2 ☆☆☆☆☆☆ (黑体四号)正文……(首行缩进两个字,宋体小四号)2.1 ☆☆☆☆、☆☆☆☆☆☆,☆☆☆(黑体小四号)正文……(首行缩进两个字,宋体小四号)2.1.1☆☆☆,☆☆☆☆☆,☆☆☆☆(楷体小四号)正文……(首行缩进两个字,宋体小四号)(1)……图1. 工作波形示意图(图题,居中,宋体五号)…………5结论(黑体四号)☆☆☆☆☆☆(首行缩进两个字,宋体小四号)参考文献(黑体四号、顶格)参考文献要另起一页,一律放在正文后,不得放在各章之后。
只列出作者直接阅读过或在正文中被引用过的文献资料,作者只写到第三位,余者写“等”,英文作者超过3人写“et al”。
几种主要参考文献著录表的格式为:⑴专(译)著:[序号]著者.书名(译者)[M].出版地:出版者,出版年:起~止页码.⑵期刊:[序号]著者.篇名[J].刊名,年,卷号(期号):起~止页码.⑶论文集:[序号]著者.篇名[A]编者.论文集名[C] .出版地:出版者,出版者. 出版年:起~止页码.⑷学位论文:[序号]著者.题名[D] .保存地:保存单位,授予年.⑸专利文献:专利所有者.专利题名[P] .专利国别:专利号,出版日期.⑹标准文献:[序号]标准代号标准顺序号—发布年,标准名称[S] .⑺报纸:责任者.文献题名[N].报纸名,年—月—日(版次).附录(居中,黑体四号)☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆(首行缩进两个字,宋体小四号)(另起一页。
基于vhdl(7,4)汉明码编解码器的设计说明书

(7,4)汉明码编解码器的设计序言VHDL语言具有功能强大的语言结构,可用明确的代码描述复杂的控制逻辑设计,并且具有多层次的设计描述功能,支持设计库和可重复使用的元件的生成。
近几十年来,EDA技术获得了飞速发展。
它以计算机为平台,根据硬件描述语言VHDL,自动地完成逻辑编译、化简分割、综合及优化,布局布线,仿真直至对特定目标芯片的适配编译,逻辑映射和编程下载等工作。
以自顶向下的设计方法,使硬件设计软件化,摆脱了传统手工设计的众多缺点。
随着EDA技术的深入发展基于硬件描述语言的方法将有取代传统手工设计方法的趋势。
EDA ( Elect ronics Design Automation) 技术是随着集成电路和计算机技术飞速发展应运而生的一种高级、快速、有效的电子设计自动化工具。
目前,VHDL语言已经成为EDA的关键技术之一,VHDL 是一种全方位的硬件描述语言,具有极强的描述能力,能支持系统行为级、寄存器传输级和逻辑门级三个不同层次的设计,支持结构、数据流、行为三种描述形式的混合描述,覆盖面广,抽象能力强,因此在实际应用中越来越广泛。
汉明码是在原编码的基础上附加一部分代码,使其满足纠错码的条件。
它属于线性分组码,由于汉明码的抗干扰能力较强,至今仍是应用比较广泛的一类码。
本文用VHDL语言实现了(7,4)汉明码的编码和译码,并通过实例来说明利用VHDL语言实现数字系统的过程。
在介绍(7,4)汉明码编码和译码原理的基础上,设计出了(7,4)汉明码的编码器和译码器,写出了基于VHDL实现的源程序,并通过QUARTUSⅡ软件进行仿真验证。
第1章QuartusⅡ与VHDL简介1.1 QuartusⅡ软件简介QuartusⅡ是Altera公司推出的CPLD/FPGA的开发工具,QuartusⅡ提供了完全集成且与电路结构无关的开发环境,具有数字逻辑设计的全部特性。
?/P>Quartus Ⅱ设计软件提供完整的多平台设计环境,可以很轻松地满足特定设计的需要。
(7,4)汉明码编译码软件设计

*******************实践教学*******************兰州理工大学计算机与通信学院2012年秋季学期计算机通信课程设计题目:(7,4)汉明码编译码软件设计专业班级:姓名:学号:指导教师:成绩:摘要汉明码是一种能自动检错并纠正一位错码的线性纠错码,用于信道编码与译码中,高通信系统抗干扰的能力。
本次课设主要是(7,4)汉明码的编译码软件设计,该软件可以对输入的多个四位信息码进行编码,对于接收的多个七位信息码可以进行译码,从而译出四位信息位.当接收到的信息码有一位错误时,可以纠正这一位错码,进而译出正确的信息码组,整个程序使用C语言编写.关键词:汉明码、编码、译码、检错、纠错目录一、C语言简介 (1)1.1什么是C语言 (1)1.2 C语言的特点 (1)1.3 运行C程序的步骤与方法 (2)二、汉明码编码 (4)2.1汉明码编码原理 (4)2.2监督矩阵 (6)2.3生成矩阵 (7)三、汉明码纠错检错 (9)3.1 汉明距离 (9)3.2 汉明码纠错原理 (9)四、汉明码编译码的实现过程 (10)4.1编码过程 (10)4.2译码过程 (10)五、软件设计及测试分析 (12)5.1程序流程图 (12)5.1.2 编码程序流程图 (12)5.1.3 译码程序流程图 (13)5.2 软件运行分析 (15)5.2.1主程序运行分析 (15)5.2.2 编码运行分析 (17)5.2.3 译码运行分析 (18)5.3 软件分析 (19)总结 (20)参考文献 (21)附录 (22)一、C语言简介1.1什么是C语言C语言是一种计算机程序设计语言。
它既具有高级语言的特点,又具有汇编语言的特点。
它由美国贝尔研究所的D.M.Ritchie于1972年推出。
1978后,C语言已先后被移植到大、中、小及微型机上。
它可以作为工作系统设计语言,编写系统应用程序,也可以作为应用程序设计语言,编写不依赖计算机硬件的应用程序。
用MCS-51实现(7,4)汉明码的译码方法

20 0 6年第 1 1期 总 秉 2 6 2
用 MC 一 1 S 5 实现(,) 74汉明码的译码方法
贾培 军 , 世 平 杨
( 安 大学 物 理 与 电 子 信 息 学 院 延 陕 西 延 安 76 0 ) 1 0 0
摘
要 : 字信 号在 传输过程 中需要用信道编码 来降低误 码率 , 高数 字通信的 可靠性 , 数 提 汉明码 正是 一种编码 效率 高且
s s e , i i lsg a r c s i g lc la e e wo k I h s p p r c d n t o f i l me t g( , ) a y t m d g t in lp o e sn , o a r a n t r . n t i a e , o ig me h d o mp e n i a n 7 4 H mmi g b s d o n ae n
关 键 词 : 明 码 ; 片机 MC 汉 单 S一5 ; 道 ; 码 1信 译 中图分类号 : TN9 1 1 文 献标 识码 : B 文 章 编 号 :0 4 7X(0 6 1 —0 9 2 10 —3 3 2 0 ) 1 5 —0
C d n eh fI lme t g ( , ) Ha mi gB C o i gM t o o mp e n i d n 74 m n y M S一5 1
M CS 一 51 i nt o c d. S i r du e
K y r s: mmi g; CS一5 ; h n e ; o i g e wo d Ha n M c a n lc dn 1
l 引
言
两个错误 。
在 当今 和 未来 的 信 息 化 社 会 中 , 字 通 信 已成 为 信 息 数 传 输 的重 要 手 段 , 球 数 字 化 已 成 为 当今 社 会 的 主 要 潮 全
(7,4)汉明码课程设计

【摘要】本文主要介绍利用ALTERA公司的Quartus II软件实现(7,4)汉明码的编码和译码的设计,设计共分为三个模块:m序列产生与分组模块、编码模块、译码模块,实现m序列的分组输出。
在QuartusII编辑环境下用VHDL文本输入的输入方法编制程序,经编译正确后进行波形仿真,调试,从而验证设计的正确性。
关键字:汉明码,编码,译码,VHDL【Abstract】T his article propose a method for Hamming encoder and Hamming decoder which is based on the VHDL language. It introduces the theory of Hamming encoder and Hamming decoder and the source program based on VHDL, and the way simulated and checked through QuartusII.Throughout the whole design is totally divided into three modules: the m sequence generated and the Packet Module,the encoding module,the decoding Module.Keywords: Hamming, coder,encoder, decoder ,VHDL目录第1章问题的提出及方案论证 (3)1.1 问题的提出 (3)1.2 方案论证 (3)1.2.1 Quartus II和VHDL简介 (3)1.2.2 软件设计方案介绍 (6)第2章设计方案的实施 (8)2.1 m序列模块 (8)2.1.1 m序列简介 (8)2.1.2 m序列模块设计流程 (9)2.2 (7,4)汉明码知识介绍 (10)2.2.1基本概念 (10)2.2.2监督矩阵 (11)2.2.3生成矩阵 (12)2.2.4 伴随式(校正子)S (12)2.3 汉明码编码模块 (13)2.3.1汉明码编码原理 (13)2.3.2 汉明码编码程序设计流程 (14)2.4 汉明码译码模块 (15)2.4.1汉明码译码原理 (15)2.4.2汉明码译码程序设计流程 (16)第3章软件调试及遇到的问题 (19)3.1 软件调试仿真波形图 (19)3.2 软件调试过程中遇到的问题 (21)第4章总结体会 (22)附录: (23)参考文献 (30)第1章问题的提出及方案论证1.1 问题的提出在上学期的通信原理课程中,我们学习了线性码的基本理论知识。
(完整word版)matlab(7,4)汉明码和(7,4)循环码的编程设计
二、创新实验设计创新实验一:(7,4)汉明码的编码与译码实现1、实验目的实现(7,4)汉明码的编码与译码,通过这次实验不但加深了对汉明码编码和译码原理了解,而且对线性分组码有所了解。
2、实验原理线性分组码的构造方法比较简单、理论较为成熟,应用比较广泛。
汉明码是一种能够纠正一个错码的效率比较高的线性分组码,下面以(7,4)码为例就汉明码的编码与译码分别进行介绍:(1)编码原理一般来说,若汉明码长为n ,信息位数为k ,则监督位数r=n-k 。
若希望用r 个监督位构造出r 个监督关系式来指示一位错码的n 种可能位置,则要求21r n -≥或211rk r -≥++ (1)设汉明码(n,k )中k=4,为了纠正一位错码,由式(1)可知,要求监督位数r ≥3。
若取r=3,则n=k+r=7。
这样就构成了(7,4)码。
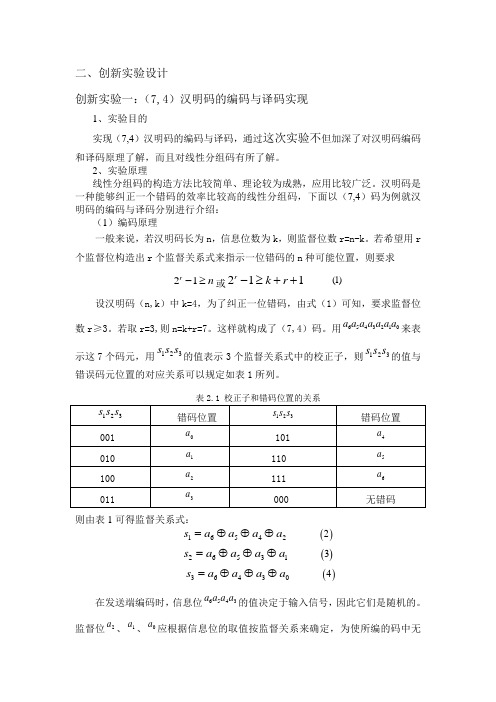
用6543210a a a a a a a 来表示这7个码元,用123s s s 的值表示3个监督关系式中的校正子,则123s s s 的值与错误码元位置的对应关系可以规定如表1所列。
表2.1 校正子和错码位置的关系则由表1可得监督关系式:16542s a a a a =⊕⊕⊕()226531s a a a a =⊕⊕⊕()3 36430s a a a a =⊕⊕⊕()4 在发送端编码时,信息位6543a a a a 的值决定于输入信号,因此它们是随机的。
监督位2a 、1a 、a 应根据信息位的取值按监督关系来确定,为使所编的码中无错码,则123,,S S S 等于0,即65426531643000(5)0a a a a a a a a a a a a ⊕⊕⊕=⎧⎪⊕⊕⊕=⎨⎪⊕⊕⊕=⎩方程组(5)可等效成如下矩阵形式6543210111010001101010010110010a a a a a a a ⎡⎤⎢⎥⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦(6)式(6)可简化为0T T HA =,H 为监督矩阵,则由式(6)可得到监督矩阵11101001101010=[P I ] (7)1011001r H ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦因为生成矩阵'=[I Q]=[I ]k k G P ,所以由(7)得生成矩阵G 如下:[]k 10001110100110[']00101010001011k G I Q I P ⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎣⎦然后利用信息位和生成矩阵G 相乘产生整个码组,即有[][]65432106543=(8)A a a a a a a a a a a a G=其中A 为整个码组矩阵,6543a a a a 是信息位。
(7,4)汉明码编译码系统CPLD实现

课程设计报告题目:(7,4)汉明码编译码系统CPLD实现系(部):专业:班级:姓名:年月日(7,4)汉明码编译码系统CPLD实现一.设计目的通过本课程设计巩固并扩展通信原理课程的基本概念、基本理论、分析方法和实现方法。
结合EDA技术、数字通信技术和微电子技术,学习现代数字通信系统的建模和设计方法,使学生能有效地将理论和实际紧密结合,培养创新思维和设计能力,增强软件编程实现能力和解决实际问题的能力。
二.设计要求⑴熟悉数字电路设计的一般方法,熟练地运用通信理论,进行数字基带信号、数字信号频带传输系统设计,掌握对数字基带信号的处理方法,并进行通信系统建模。
⑵熟悉和掌握MAXPLUSⅡ软件的使用,按设计要求进行建模;⑶设计完成后,按学校规范统一书写格式撰写课程设计报告一份,包括:设计目的、设计要求、逻辑分析、设计总体电路、模块设计、模块程序(含对程序的说明)、仿真波形、实验结果分析、心得体会(不少于500字)、参考文献(不少于5篇)等。
三.逻辑分析线性分组码是一种很重要的纠错码,应用很广泛。
在(n,k)分组码种,若监督码元是按线性关系模2相加而得到的,则称其为线性分组码。
循环码是采用循环移位特性界定的一类线性分组码。
如果一个线性分组码的任意一个码字都是另外一个码字的循环移位,那么称此线性分组码为一个循环码。
而本次课程设计要求采用新型数字系统设计的方法实现(7,4)汉明码。
汉明码是差错控制编码中最主要、最常用的一种。
它有很强的纠错能力,所以普遍应用于各种实际的差错控制系统。
要求用CPLD实现(7,4)汉明码编码解码的方法,可以采用原理图或VHDL编程输入的方式。
(7,4)汉明码的编码就是将输入的4位信息码加上3位监督码从而编成7位汉明码输出。
监督位的生成如下:b(2)<=a(3) xor a(2) xor a(1);b(1)<=a(3) xor a(2) xor a(0);b(0)<=a(3) xor a(1) xor a(0);(7,4)汉明码的译码就是将输入的7位汉明码译为4位信息码,并且根据得到的校正子纠正编码过程中可能出现的1位错码。
(7,4)汉明码编码程序

int u[4]; //声明待编码的消息序列,即未编码前的信息序列
int v[7]; //声明编码后的码字序列
int i,j,k;
//顺序输入待编码4位信息序列
lable: cout<<"请输入4位待编码消息序列:"<<endl;
cout<<" 等待编码中…… "<<endl;
cout<<"编码成功!编码后的码字序列为:"<<" ";
for(j=0;j<7;j++)
{
if(j==3) ຫໍສະໝຸດ // v1=v3^v4^v5;
// v2=v4^v5^v6;
cout<<"(1100) (1011100) | (1101) (0001101)"<<endl;
cout<<"(0010) (1110010) | (0011) (0100011)"<<endl;
if(j==1)
v[j]= ((u[0]^u[1])^u[2]);//异或运算
if(j==2)
v[j]= ((u[1]^u[2])^u[3]);//异或运算
matlab(7-4)汉明码和(7-4)循环码的编程设计

二、创新实验设计创新实验一:(7,4)汉明码的编码与译码实现1、实验目的实现(7,4)汉明码的编码与译码,通过这次实验不但加深了对汉明码编码和译码原理了解,而且对线性分组码有所了解。
2、实验原理线性分组码的构造方法比较简单、理论较为成熟,应用比较广泛。
汉明码是一种能够纠正一个错码的效率比较高的线性分组码,下面以(7,4)码为例就汉明码的编码与译码分别进行介绍:(1)编码原理一般来说,若汉明码长为n ,信息位数为k ,则监督位数r=n-k 。
若希望用r 个监督位构造出r 个监督关系式来指示一位错码的n 种可能位置,则要求21r n -≥或211rk r -≥++ (1)设汉明码(n,k )中k=4,为了纠正一位错码,由式(1)可知,要求监督位数r ≥3。
若取r=3,则n=k+r=7。
这样就构成了(7,4)码。
用6543210a a a a a a a 来表示这7个码元,用123s s s 的值表示3个监督关系式中的校正子,则123s s s 的值与错误码元位置的对应关系可以规定如表1所列。
表2.1 校正子和错码位置的关系则由表1可得监督关系式:在发送端编码时,信息位6543a a a a 的值决定于输入信号,因此它们是随机的。
监督位2a 、1a 、a 应根据信息位的取值按监督关系来确定,为使所编的码中无错码,则123,,S S S 等于0,即 方程组(5)可等效成如下矩阵形式式(6)可简化为0T T HA =,H 为监督矩阵,则由式(6)可得到监督矩阵 因为生成矩阵'=[I Q]=[I ]k k G P ,所以由(7)得生成矩阵G 如下: 然后利用信息位和生成矩阵G 相乘产生整个码组,即有 其中A 为整个码组矩阵,6543a a a a 是信息位。
根据上述原理可以得到(7,4)汉明码的整个码组。
(2)译码与检错、纠错原理当数字信号编码成汉明码后,由于信道噪声的存在,使得经过信道后的汉明码会发生差错,使得接收端接收到错码,因此需要多错码进行纠正,以提高通信系统的抗干扰能力及可靠性。
c8051f单片机原理及应用
c8051f单片机原理及应用C8051F单片机是由Silicon Laboratories公司推出的一款高性能、低功耗、集成度高的8位单片机系列,它采用了高速8051内核,具有快速的执行速度和高效的计算能力,适用于各种应用领域。
本文将详细介绍C8051F单片机的原理和应用。
一、C8051F单片机原理1.8051内核C8051F单片机采用了高速的8051内核,它包含了一个中央处理器(CPU)、存储器、输入/输出端口、定时器/计数器、串行接口等模块。
8051内核具有简单易学、易于控制和可靠性高等特点,被广泛应用于各种嵌入式系统中。
2.存储器C8051F单片机的存储器包括闪存、RAM和EEPROM。
其中,闪存用于存储程序代码,RAM用于存储数据,EEPROM用于存储非易失性数据。
C8051F单片机的存储器容量从4KB到128KB不等,可以满足不同应用的需求。
3.输入/输出端口C8051F单片机的输入/输出端口包括数字输入/输出端口和模拟输入/输出端口。
数字输入/输出端口用于连接数字设备,模拟输入/输出端口用于连接模拟设备。
C8051F单片机的输入/输出端口可以通过软件配置,实现各种功能。
4.定时器/计数器C8051F单片机的定时器/计数器包括多个独立的定时器和计数器,它们可以通过软件配置,实现各种计时和计数功能。
5.串行接口C8051F单片机的串行接口包括SPI接口、I2C接口和UART接口。
它们可以用于与外部设备进行通信,实现数据交换和控制。
二、C8051F单片机应用C8051F单片机广泛应用于各种嵌入式系统中,例如:工业控制、智能家居、医疗设备、电子仪器等。
1.工业控制C8051F单片机可以用于各种工业控制系统中,如温度控制、湿度控制、压力控制等。
它具有高速的运算能力和丰富的输入/输出端口,可以实现复杂的控制算法和实时控制。
2.智能家居C8051F单片机可以用于智能家居系统中,如智能灯光控制、智能窗帘控制、智能门锁控制等。
合工大通信比编码_74汉明编解码的实现

实验一(7,4)汉明编解码◆实验任务利用C语言或C++实现(7,4)汉明码的编码与解码,其中解码包括检错与纠错,要求可以纠正一位错误。
◆实验目的●掌握线性分组码的编码原理●掌握线性分组码的译码原理◆实验原理汉明码是能纠正单个错误的线性分组码。
它有以下特点:码长…………n=2^m-1最小码距…………d=3信息码位…………k=2^m-m-1纠错能力…………t=1监督码位…………r=n-k(7,4)汉明码的生成矩阵为:10001010100111G=00101100001011(7,4)汉明码的校验矩阵为:1110100H=01110101101001(7,4)汉明码校正子与错误位置的关系●(7,4)汉明码的编码原理利用矩阵相乘的原理,码字向量v等于待编的消息向量u与生成矩阵G相乘得到,由于(7,4)线性码的后四位为信息位,与输入的消息相同,因此只需对前三位校验位进行编译,根据课本例题3-2,由矩阵乘法可以得到v0=u0+u2+u3v1=u0+u1+u2v2=u1+u2+u3v3=u0v4=u1v5=u2v6=u3前三位校验位对输入的四位消息序列中的三位进行模二加即可实现编码。
●(7,4)汉明码的检错原理由校验矩阵,若接收到的码字正确,则接收到的码字为r向量,则其与校验矩阵的转置相乘可以得到0向量,设接收到的向量为s向量,s向量即为校正子,若s向量不等于0,则一定有错,由r向量和校验矩阵的转置相乘可以得到S1S2S3,S1S2S3即是校正子,由上表错误位置与校正子的对应位置关系,可以判断出错误的位置,校正子与校验矩阵每列序列相对应,因此可以用校正子与校验矩阵每列相对比,可以判断出错的位置,为纠错做准备。
●(7,4)汉明码纠错的基本原理根据校正子判断出是否出错以及出错位置,如果S1S2S3为全零则正确,否则根据校正子判断出出错的位置,将对应位的0/1相应的取反,则接收到的码字是正确的,输出接收码字的后四位即为译码的结果。
C8051F单片机原理及应用课程设计

C8051F单片机原理及应用课程设计
一、设计背景及意义
C8051F单片机具有结构简单、易于编程、使用灵活等特点,在嵌入
式行业越来越受到重视。
设计这门课程的主要目的是向学生介绍
C8051F单片机的基本结构、编程技巧和应用场景,培养学生的嵌入式
系统管理和开发能力,从而满足市场对嵌入式人才的需求。
二、教学内容与目标
1. 教学内容
•C8051F单片机的硬件介绍:内部结构、各部件功能、寄存器、引脚说明等;
•C8051F单片机的编程技巧:汇编语言、C语言、应用程序设计;
•C8051F单片机的应用场景:实时控制、AD转换、PWM控制、串口通信等。
2. 教学目标
•了解C8051F单片机的内部结构和工作原理;
•掌握C8051F单片机的编程技巧;
•能够运用C8051F单片机进行嵌入式系统开发。
1。
单片机实现(7,4)汉明码的编码毕业设计[管理资料]
![单片机实现(7,4)汉明码的编码毕业设计[管理资料]](https://img.taocdn.com/s3/m/3b7367eca300a6c30d229f0e.png)
单片机实现(7,4)汉明码的编码摘要在当今和未来的信息化社会中,数字通信已成为信息传输的重要手段,全球数字化已成为当今世界的主要潮流。
但是,数字信号在传输过程中,加性噪声,码间串扰等都会产生误码,因此需要用信道编码来降低误码率,提高数字通信的可靠性。
随着差错控制编码技术的蓬勃发展,作为信道传输过程抗干扰的有效手段,其中较为成熟的编码方法如汉明码、奇偶校验码、循环冗余码等编码技术,被广泛应用于计算机、电子通信、控制等领域。
其中汉明码是一种能够纠正一位错误且编码效率较高的线性分组码。
由于它的编译码在工程上较易实现,所以应用广泛。
与其他的错误校验码类似,汉明码也利用了奇偶校验位的概念,通过在数据位后面增加一些比特,可以验证数据的有效性。
利用一个以上的校验位,汉明码不仅可以验证数据是否有效,还能在数据出错的情况下指明错误位置。
在接受端通过纠错译码自动纠正传输中的差错来实现码纠错功能,称为前向纠错FEC。
在数据链路中存在大量噪音时,FEC可以增加数据吞吐量。
通过在传输码列中加入冗余位(也称纠错位)可以实现前向纠错。
但这种方法比简单重传协议的成本要高。
汉明码利用奇偶块机制降低了前向纠错的成本。
软件实现下面给出基于最常用的MCS-51单片机汇编语言的汉明码测试程序。
它的有效信息占到了总编码长度的70%,测试程序中自动生成11个字节的原始数据。
原始数据块的长度、存放地址可根据实际情况由用户自己确定,只要将本测试程序的汉明码编码、解码子程序嵌入用户应用程序中,就可直接使用。
本课题就是研究利用C8051F系列单片机来实现(7,4)汉明码的编码。
关键词:单片机;线性分组码;(7,4)汉明码C8051F series MCU(7,4)hamming code encodingABSTRACTIn today's and future information society, digital communication has become an important means of information transmission, the global digital has become a major trend in today's world. However, the digital signal in the transmission process, the additive noise, intersymbol interference, and this will result in error, channel coding, therefore need to reduce the error rate and improve the reliability of digital communications. With the error control coding techniques flourished as the transmission channel interference and effective means by which the more mature coding methods, such as Hamming codes, parity bits, cyclic redundancy code and other coding techniques are widely used in computers, electronics communication, control and other fields. Hamming code which is able to correct a mistake and the code more efficient linear block codes. Encoding and decoding in the project because of its easier to achieve, so widely used. With other similar error check code, Hamming code parity bit also use the concept, followed by an increase in the number of bits of data bits, the validity of data can be verified. Use more than one parity bit, Hamming codes can not only verify the data is valid, but also in the caseof data error location specified in the error. By error correction decoding in a receiver automatically correct the transmission errors to achieve error correction code, known as forward error correction FEC. There are a lot of data-link noise, FEC can increase data throughput. Transmission code in the column by adding redundant bits (also known as error correction bits) can be achieved FEC. However, this method than a simple retransmission protocol to the high cost. Hamming code parity block mechanism reduces the use of forward error correction costs. Software are given below based on the most popular MCS-51 microcontroller Hamming code assembly language test program. It accounts for effective information length of 70% of the total coding and testing program automatically generates 11 bytes of raw data. The length of the original data block, or hold the actual situation according to the user to determine if the Hamming code of the test program encoding and decoding routines embedded in user applications, can be used directly.This topic is to study the use of C8051F MCU to achieve (7,4) hamming code encoding.Keywords:MCU;linear block codes; (7,4) hamming code目录第1章绪论 (1)第2章实验的软硬件环境 (2)VHDL语言的概述 (2)VHDL语言的发展历史 (2)VHDL语言的特点 (2)VHDL语言的开发流程 (3)VHDL的程序结构 (4)逻辑芯片的分类 (5)MAX+plusⅡ的使用 (8)第3章基于CPLD的PCM解码电路的设计 (11)PCM的概述 (12)解调PCM码的基本原理 (17)位同步的实现 ............................................................................ 错误!未定义书签。
C8051F单片机实验系统设计方案

C8051F单片机实验系统设计方案目前高校单片机教学中大多是以MCS51 单片机为首选机型进行讲解,所开发的教学实验系统也多是基于MCS51 系列单片机开发设计的。
然而,随着单片机的应用进入SoC 时代,其不足和缺陷也显而易见:片上资源不够丰富,功耗较大,处理速度很有限,电路庞大且复杂,可靠性和可维护性较差,难以满足高水平的设计要求。
为了进一步简化电路结构,提出一种C8051F 单片机实验系统设计方案,该方案采用FPGA 实现单片机各种外设接口。
FPGA 作为一种可编程逻辑器件凭借其优越的可扩展性能受到设计者的青睐,逐渐成为分立元件的替代者。
通过对FPGA 编程,实现任何数字元件的逻辑功能,设计者可以通过原理图输入或硬件描述语言,方便地设计一个数字系统,这使得单片机外围电路的设计简单、灵活、可靠。
本系统是为单片机实践教学而开发的,因此要求单片机的功能齐全,满足教学中各种实验的要求。
一般的实验板的功能有:模拟数字信号转换实验、通信接口实验、存储器实验、各种显示实验,人机交互实验等等。
除此之外,还要考虑由于是非商业性质的开发,对一些功能的精度要求不是很高,在选择最理想价格的同时,选择尽可能多而全的片上资源,留待后期开发扩充。
基于以上考虑,该平台使用SoC 系统级的C8051F020 单片机作为核心控制器,CycloneⅡEP2C8 型FPGA 实现外设接口,加上LCD、键盘、UART 串口等人机交互的模块。
C8051F 系列单片机是以流水线方式处理指令的CIP-5l 内核,完全集成的混合信号系统级芯片(Soc),片内集成了数据采集和控制系统中常用的模拟、数字外设及其他功能部件。
C8051F020 单片机具有片内调试电路,通过4 引脚的JTAG 接口可以进行非侵入式、全速的在系统调试。
FPGA 即现场可编程门阵列,它是作为专用集成电路(ASIC)领域中的一种半定制电路,既解决了定制电路的不足,又克服了原有。
74循环汉明码编码及译码

74循环汉明码编码及译码clear all;close all;%-------------(7,4)循环汉明码的编码----------------- n=7;k=4;p=cyclpoly(n,k,'all');[H,G]=cyclgen(n,p(1,:));Msg=[0 0 0 0;0 0 0 1;0 0 1 0;0 1 0 0;0 1 0 1];C=rem(Msg*G,2)M=input('M=');disp( '输入信源序列:');Msg=input('Msg=');C=rem(Msg*G,2) %编码结果R=7/4*log2(2) %计算码元信息率%----------- (7,4)循环码的译码------------------- M=input('M=');disp( '输入接收序列:');Msg=input('Msg=');S=mod(Msg*H',2)for i=1:Mif S(i)==[0 0 0]disp('接收码元无错');Rsg=Msgelseif S(i)==[1 0 0]disp('监督元a0位错');if Msg(0)==0Msg(0)=1;elseif Msg(0)==1Msg(0)=0;endRsg=Msgelseif S(i)==[0 1 0] disp('监督元a1位错'); if Msg(1)==0Msg(1)=1;elseif Msg(1)==1 Msg(1)=0;endRsg=Msgelseif S(i)==[0 0 1] disp('监督元a2位错'); if Msg(2)==0Msg(2)=1;elseif Msg(2)==1 Msg(2)=0;endRsg=Msgelseif S(i)==[1 0 1] disp('信息元第1位错'); if Msg(3)==0Msg(3)=1;elseif Msg(3)==1 Msg(3)=0;endRsg=Msgelseif S(i)==[1 1 1] disp('信息元第2位错'); if Msg(4)==0Msg(4)=1;elseif Msg(4)==1 Msg(4)=0;endRsg=Msgelseif S(i)==[1 1 0] disp('信息元第3位错'); if Msg(5)==0Msg(5)=1;elseif Msg(5)==1 Msg(5)=0;endRsg=Msgelseif S(i)==[0 1 1] disp('信息元第4位错'); if Msg(6)==0Msg(6)=1;elseif Msg(6)==1 Msg(6)=0;endRsg=Msgelsedisp('无法纠错');Rsg=MsgendendH =1 0 0 1 1 1 00 1 0 0 1 1 10 0 1 1 1 0 1G =1 0 1 1 0 0 0 1 1 1 0 1 0 0 1 1 0 0 0 1 0 0 1 1 0 0 0 1。
单片机IIC程序设计用c8051f单片机
#include <c8051f020.h> // SFR declarations//------------------------------------------------------------------------------------// Global CONSTANTS//------------------------------------------------------------------------------------#define WRITE 0x00 // SMBus WRITE command#define READ 0x01 // SMBus READ command// Device addresses (7 bits, lsb is a don't care)#define CLOCK3530_ADDRESS_RESET 0x60 //1 ack#define CLOCK3530_ADDRESS_STATUS 0x62 //2 ack#define CLOCK3530_ADDRESS_DATEHOUR 0x64 //8 ack year month day week hour minute second#define CLOCK3530_ADDRESS_HOUR 0x66 //4 ack hour minute second#define CLOCK3530_ADDRESS_INT1 0x68 //3 ack#define CLOCK3530_ADDRESS_INT2 0x6A //3 ackunion{unsigned char ClockString[7];struct RealClock{unsigned char Year,Month,Day,Week,Hour,Minute,Second;} RT;} RealTime;// SMBus states:// MT = Master Transmitter// MR = Master Receiver#define SMB_BUS_ERROR 0x00 // (all modes) BUS ERROR#define SMB_START 0x08 // (MT & MR) START transmitted#define SMB_RP_START 0x10 // (MT & MR) repeated START#define SMB_MTADDACK 0x18 // (MT) Slave address + W transmitted;// ACK received#define SMB_MTADDNACK 0x20 // (MT) Slave address + W transmitted;// NACK received#define SMB_MTDBACK 0x28 // (MT) data byte transmitted; ACK rec'vd #define SMB_MTDBNACK 0x30 // (MT) data byte transmitted; NACK rec'vd#define SMB_MTARBLOST 0x38 // (MT) arbitration lost#define SMB_MRADDACK 0x40 // (MR) Slave address + R transmitted;// ACK received#define SMB_MRADDNACK 0x48 // (MR) Slave address + R transmitted;// NACK received#define SMB_MRDBACK 0x50 // (MR) data byte rec'vd; ACK transmitted #define SMB_MRDBNACK 0x58 // (MR) data byte rec'vd; NACK transmitted//-----------------------------------------------------------------------------------//Global V ARIABLES//-----------------------------------------------------------------------------------char COMMAND; // Holds the slave address + R/W bit for use in the SMBus ISR. unsigned char *I2CDataBuff;char BYTE_NUMBER; // Used by ISR to check what data has just been// sent - High address byte, Low byte, or data byteunsigned char HIGH_ADD, LOW_ADD; // High & Low byte for EEPROM memory addressbit SM_BUSY; // This bit is set when a send or receive// is started. It is cleared by the// ISR when the operation is finished.//------------------------------------------------------------------------------------// Function PROTOTYPES//------------------------------------------------------------------------------------void SMBus_ISR (void);//------------------------------------------------------------------------------------// MAIN Routine//------------------------------------------------------------------------------------//// Main routine configures the crossbar and SMBus, and tests// the SMBus interface between the three EEPROMsvoid ResetRealClock(void){while (SM_BUSY); // Wait for SMBus to be free.SM_BUSY = 1; // Occupy SMBus (set to busy)SMB0CN = 0x44; // SMBus enabled, ACK on acknowledge cycleBYTE_NUMBER = 0; // 2 address bytes.COMMAND = (CLOCK3530_ADDRESS_RESET | READ); // Chip select + READ STA = 1; // Start transferwhile (SM_BUSY); // Wait for transfer to finish }//======================写S-3530A内部实时数据寄存器程序=====================//功能:将设定年、月、日、星期、时、分、秒数据写入S-3530A |//入口:发送数据放在年、月、日、星期、时、分、秒各寄存器|//出口:NONE |//===================================================================== =====void SetRealClock(void){while (SM_BUSY); // Wait for SMBus to be free.SM_BUSY = 1; // Occupy SMBus (set to busy)SMB0CN = 0x44; // SMBus enabled, ACK on acknowledge cycleBYTE_NUMBER = 7; // 2 address bytes.COMMAND = (CLOCK3530_ADDRESS_DATEHOUR | WRITE); // Chip select + WRITEI2CDataBuff = &RealTime.ClockString[0]; // Data to be writenSTA = 1; // Start transfer}//==================读S-3530A实时数据寄存器子程序===========================//功能:从S-3530A读入当前时间数据|//入口:NONE |//出口:接收数据放在年、月、日、星期、时、分、秒各寄存器|//===================================================================== =====void GetRealClock(void){while (SM_BUSY); // Wait for SMBus to befree.SM_BUSY = 1; // Occupy SMBus (set to busy)SMB0CN = 0x44; // SMBus enabled, ACK on acknowledge cycleBYTE_NUMBER = 7; // 2 address bytes.COMMAND = (CLOCK3530_ADDRESS_DATEHOUR | READ); // Chip select + READI2CDataBuff = &RealTime.ClockString[0]; // Data to be writenSTA = 1; // Start transferwhile (SM_BUSY); // Wait for transfer to finish }//============================写状态寄存器程序==============================//功能:读/写S-3530A状态寄存器,对S-3530A进行设置|//入口:NONE 出口:NONE | //===================================================================== =====unsigned char GetRealClockStatus(void){unsigned char result;while (SM_BUSY); // Wait for SMBus to be free.SM_BUSY = 1; // Occupy SMBus (set to busy)SMB0CN = 0x44; // SMBus enabled, ACK on acknowledge cycleBYTE_NUMBER = 1;COMMAND = (CLOCK3530_ADDRESS_STATUS | READ);I2CDataBuff = &result;STA = 1; // Start transferwhile (SM_BUSY); // Wait for transfer to finish return result;}void SetRealClockStatus(unsigned char status){while (SM_BUSY); // Wait for SMBus to be free.SM_BUSY = 1; // Occupy SMBus (set to busy)SMB0CN = 0x44; // SMBus enabled, ACK on acknowledge cycleBYTE_NUMBER = 1;COMMAND = (CLOCK3530_ADDRESS_STA TUS | WRITE);I2CDataBuff = &status;STA = 1; // Start transfer}/*void SetRealClockINT1(unsigned int Int1){while (SM_BUSY); // Wait for SMBus to be free.SM_BUSY = 1; // Occupy SMBus (set to busy)SMB0CN = 0x44; // SMBus enabled, ACK on acknowledge cycleBYTE_NUMBER = 2;COMMAND = (CLOCK3530_ADDRESS_INT1 | WRITE);I2CDataBuff = (unsigned char*)&Int1;STA = 1; // Start transfer}*/#include "INTRINS.H"unsigned char revolve(unsigned char val){char i;unsigned char val1=0;for (i=0;i<8;i++){if (val&0x1)val1++;val1=_crol_(val1,1);val=_cror_(val,1);}val1=_cror_(val1,1);return val1;}/*-- 文字: 时--*/char code Shi[]={0x00,0x00,0xFC,0x44,0x44,0xFC,0x00,0x08,0x48,0x88,0x08,0xFF,0x08,0x08,0x08,0x00, 0x00,0x00,0x1F,0x04,0x04,0x0F,0x00,0x00,0x00,0x11,0x20,0x1F,0x00,0x00,0x00,0x00, };/*-- 文字: 钟--*/char code Zhong[]={0x00,0x60,0x38,0xE7,0x24,0x24,0x04,0x00,0xF8,0x88,0x88,0xFF,0x88,0x88,0xF8,0x00, 0x00,0x01,0x01,0x3F,0x11,0x09,0x01,0x00,0x01,0x00,0x00,0x3F,0x00,0x00,0x01,0x00, };void LCD_WriteHZ(char x,char y,char *Dot);void LCD_DispChar(char x,char y,char ch); //128*64 取值x=0-128 y=0-8void InitLCD(void);void Delay1ms(unsigned char T);void TestI2C (void){unsigned char var ;WDTCN = 0xde; // disable watchdog timerWDTCN = 0xad;OSCICN |= 0x03; // Set internal oscillator to highest setting// (16 MHz)XBR0 |= 0x07; // Route SMBus to GPIO pins through crossbarXBR2 |= 0x44; // Enable crossbar and weak pull-upsP0MDOUT |= 0x1D;P1MDOUT |= 0x01;SMB0CN = 0x44; // Enable SMBus with ACKs on acknowledge cycleSMB0CR = -80; // SMBus clock rate = 100kHz.EIE1 |= 2; // SMBus interrupt enableEA = 1; // Global interrupt enableSM_BUSY = 0; // Free SMBus for first transfer.// SetRealClockINT1(0x8000);var = GetRealClockStatus();ResetRealClock();var = GetRealClockStatus();SetRealClockStatus(0xc2);var = GetRealClockStatus();GetRealClock();RealTime.RT.Year=0x02;RealTime.RT.Month=0x12;RealTime.RT.Day=0x010;RealTime.RT.Week=0x05;RealTime.RT.Hour=0x11;RealTime.RT.Minute=0x59;RealTime.RT.Second=0x57;SetRealClock();GetRealClock();InitLCD();LCD_WriteHZ(0,0,Shi);LCD_WriteHZ(16,0,Zhong);//在0,2处显示00:00:00LCD_DispChar(0,2,0); //128*64 取值x=0-128 y=0-8LCD_DispChar(8,2,0);LCD_DispChar(16,2,10);LCD_DispChar(24,2,0);LCD_DispChar(32,2,0);LCD_DispChar(40,2,0xa);LCD_DispChar(48,2,0);LCD_DispChar(56,2,0);//在0,4处显示02/01/01LCD_DispChar(0,4,0); //128*64 取值x=0-128 y=0-8LCD_DispChar(8,4,2);LCD_DispChar(16,4,0xb);LCD_DispChar(24,4,0);LCD_DispChar(32,4,1);LCD_DispChar(40,4,0xb);LCD_DispChar(48,4,0);LCD_DispChar(56,4,1);for (;;){GetRealClock();LCD_DispChar(0,2,(RealTime.RT.Hour>>4)&0x03);//(RealTime.RT.Hour>>4)&0x0f); //128*64 取值x=0-128 y=0-8LCD_DispChar(8,2,RealTime.RT.Hour&0x0f);LCD_DispChar(24,2,(RealTime.RT.Minute>>4)&0x0f);LCD_DispChar(32,2,RealTime.RT.Minute&0x0f);LCD_DispChar(48,2,(RealTime.RT.Second>>4)&0x0f);LCD_DispChar(56,2,RealTime.RT.Second&0x0f);//在0,4处显示02/01/01LCD_DispChar(0,4,(RealTime.RT.Year>>4)&0x0f);LCD_DispChar(8,4,RealTime.RT.Year&0x0f);LCD_DispChar(24,4,(RealTime.RT.Month>>4)&0x0f);LCD_DispChar(32,4,RealTime.RT.Month&0x0f);LCD_DispChar(48,4,(RealTime.RT.Day>>4)&0x0f);LCD_DispChar(56,4,RealTime.RT.Day&0x0f);Delay1ms(100);}}//------------------------------------------------------------------------------------// Interrupt Service Routine//------------------------------------------------------------------------------------void SMBUS_ISR (void) interrupt 7{switch (SMB0STA){ // SMBus 状态码SMB0STA 寄存器// 主发送器/接收器起始条件已发送case SMB_START:SMB0DAT = COMMAND ; // 装入要访问的从器件的地址STA = 0; // 手动清除START 位break;//主发送器/接收器重复起始条件已发送// 该状态只应在读操作期间出现在存储器地址已发送并得到确认之后?case SMB_RP_START:SMB0DAT = COMMAND; // COMMAND 中应保持从地址+ R.STA = 0;break;// 主发送器从地址+ WRITE 已发送收到ACKcase SMB_MTADDACK:// 主发送器数据字节已发送收到ACKcase SMB_MTDBACK:if (BYTE_NUMBER){SMB0DAT = revolve(*I2CDataBuff); // If R/W=WRITE, load byte to write.I2CDataBuff++;BYTE_NUMBER--;}else{STO = 1; SM_BUSY = 0; // Free SMBus}break;// 主发送器从地址+ WRITE 已发送收到NACK// 从器件不应答发送STOP + START 重试case SMB_MTADDNACK:STO = 1; STA = 1;break;// 主发送器数据字节已发送收到NACK// 从器件不应答发送STOP + START 重试case SMB_MTDBNACK:STO = 1; STA = 1;break;// 主发送器竞争失败// 不应出现如果出现重新开始传输过程case SMB_MTARBLOST:STO = 1; STA = 1;break;// 主接收器从地址+ READ 已发送,收到ACKcase SMB_MRADDACK:AA = 1; // 在应答周期ACKif (!BYTE_NUMBER){STO = 1; SM_BUSY = 0; // 释放SMBus}break;// 主接收器从地址+ READ 已发送收到NACK// 从器件不应答发送重复起始条件重试case SMB_MRADDNACK:STA = 1;break;// 收到数据字节ACK 已发送// 该状态不应出现因为AA 已在前一状态被清0 如果出现发送停止条件case SMB_MRDBACK:if (BYTE_NUMBER){*I2CDataBuff=revolve(SMB0DA T);I2CDataBuff++;BYTE_NUMBER--;}if (!BYTE_NUMBER) AA= 0;break;// 收到数据字节NACK 已发送// 读操作已完成读数据寄存器后发送停止条件case SMB_MRDBNACK:STO = 1;SM_BUSY = 0; // 释放SMBusbreak;// 在本应用中所有其它状态码没有意义通信复位default:STO = 1; // 通信复位SM_BUSY = 0;break;}SI=0; // 清除中断标志}/*{switch (SMB0STA){ // Status code for the SMBus (SMB0STA register) case SMB_START:SMB0DAT = COMMAND; // COMMAND should hold slave address + R.break;case SMB_MTADDNACK:STO = 1;STA = 1;break;case SMB_RP_START:// SMB0DAT = COMMAND; // COMMAND should hold slave address + R.// STA = 0;// break;case SMB_MTADDACK:case SMB_MTDBACK:if (BYTE_NUMBER){if (COMMAND & 0x01) // If R/W=READ,{STA = 1;}else{SMB0DAT = *I2CDataBuff; // If R/W=WRITE, load byte to write.I2CDataBuff++;BYTE_NUMBER--;}}else{STO = 1;SM_BUSY = 0; // Free SMBus}break;// Master Transmitter: Data byte transmitted. NACK received.// Slave not responding. Send STOP followed by START to try again.case SMB_MTDBNACK:STO = 1;STA = 1;break;// Master Transmitter: Arbitration lost.// Should not occur. If so, restart transfer.case SMB_MTARBLOST:STO = 1;STA = 1;break;// Master Receiver: Slave address + READ transmitted. NACK received.// Slave not responding. Send repeated start to try again.case SMB_MRADDNACK:STA = 1;break;// Data byte received. ACK transmitted.// State should not occur because AA is set to zero in previous state.// Send STOP if state does occur.case SMB_MRDBACK:STO = 1;SM_BUSY = 0;break;// Master Receiver: Slave address + READ transmitted. ACK received.// Set to transmit NACK after next transfer since it will be the last (only) byte.case SMB_MRADDACK:// AA = 0; // NACK sent on acknowledge cycle.// break;// Data byte received. NACK transmitted.// Read operation has completed. Read data register and send STOP.case SMB_MRDBNACK:if (BYTE_NUMBER){if (COMMAND & 0x01) // If R/W=READ,{*I2CDataBuff=SMB0DA T;I2CDataBuff++;}BYTE_NUMBER--;}else{STO = 1;SM_BUSY = 0; // Free SMBus}break;// All other status codes meaningless in this application. Reset communication.default:STO = 1; // Reset communication.SM_BUSY = 0;break;}SI=0; // clear interrupt flag }*/。
matlab(74)汉明码和(74)循环码的编程设计

二、创新实验设计创新实验一:(7,4)汉明码的编码与译码实现1、实验目的实现(7,4)汉明码的编码与译码,通过这次实验不但加深了对汉明码编码和译码原理了解,而且对线性分组码有所了解。
2、实验原理线性分组码的构造方法比较简单、理论较为成熟,应用比较广泛。
汉明码是一种能够纠正一个错码的效率比较高的线性分组码,下面以(7,4)码为例就汉明码的编码与译码分别进行介绍:(1)编码原理一般来说,若汉明码长为n ,信息位数为k ,则监督位数r=n-k 。
若希望用r 个监督位构造出r 个监督关系式来指示一位错码的n 种可能位置,则要求21r n -≥或211rk r -≥++ (1)设汉明码(n,k )中k=4,为了纠正一位错码,由式(1)可知,要求监督位数r ≥3。
若取r=3,则n=k+r=7。
这样就构成了(7,4)码。
用6543210a a a a a a a 来表示这7个码元,用123s s s 的值表示3个监督关系式中的校正子,则123s s s 的值与错误码元位置的对应关系可以规定如表1所列。
表2.1 校正子和错码位置的关系则由表1可得监督关系式:16542s a a a a =⊕⊕⊕()226531s a a a a =⊕⊕⊕()3 36430s a a a a =⊕⊕⊕()4 在发送端编码时,信息位6543a a a a 的值决定于输入信号,因此它们是随机的。
监督位2a 、1a 、0a 应根据信息位的取值按监督关系来确定,为使所编的码中无错码,则123,,S S S 等于0,即65426531643000(5)0a a a a a a a a a a a a ⊕⊕⊕=⎧⎪⊕⊕⊕=⎨⎪⊕⊕⊕=⎩方程组(5)可等效成如下矩阵形式6543210111010001101010010110010a a a a a a a ⎡⎤⎢⎥⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦(6)式(6)可简化为0T T HA =,H 为监督矩阵,则由式(6)可得到监督矩阵11101001101010=[P I ] (7)1011001r H ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦因为生成矩阵'=[I Q]=[I ]k k G P ,所以由(7)得生成矩阵G 如下:[]k 10001110100110[']00101010001011k G I Q I P ⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎣⎦然后利用信息位和生成矩阵G 相乘产生整个码组,即有[][]65432106543=(8)A a a a a a a a a a a a G=其中A 为整个码组矩阵,6543a a a a 是信息位。
用MCS-51实现(7,4)汉明码的译码方法

用MCS-51实现(7,4)汉明码的译码方法
贾培军;杨世平
【期刊名称】《现代电子技术》
【年(卷),期】2006(29)11
【摘要】数字信号在传输过程中需要用信道编码来降低误码率,提高数字通信的可靠性,汉明码正是一种编码效率高且具有前向纠错能力的信道编码.单片机MCS-51经典的体系结构、极好的兼容性,使MCS-51具有体积小、重量轻、价格便宜、功耗低、控制能力强及运算速度快等特点,广泛应用于数据的实时处理、高级通信系统、数字信号处理、局域网等方面,因此,通过编程的方法在单片机MCS-51上实现了(7,4)汉明码的译码.
【总页数】2页(P59-60)
【作者】贾培军;杨世平
【作者单位】延安大学,物理与电子信息学院,陕西,延安,716000;延安大学,物理与电子信息学院,陕西,延安,716000
【正文语种】中文
【中图分类】TN911
【相关文献】
1.基于Mcs-51的全译码电路设计与实现 [J], 李模刚;莫世雄;赵睿
2.基于 CCS 的(7,4)汉明码的编译码设计 [J], 夏志达;李丽华;张龙
3.汉明码编译码的FPGA设计与实现 [J], 盛孟刚
4.Mcs-51通用译码电路的设计与实现 [J], 李模刚
5.一种交织汉明码编译码器设计及其FPGA实现 [J], 庄灿;石和荣;齐永
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C8051F系列单片机实现(7,4)汉明码的编码摘要在当今和未来的信息化社会中,数字通信已成为信息传输的重要手段,全球数字化已成为当今世界的主要潮流。
但是,数字信号在传输过程中,加性噪声,码间串扰等都会产生误码,因此需要用信道编码来降低误码率,提高数字通信的可靠性。
随着差错控制编码技术的蓬勃发展,作为信道传输过程抗干扰的有效手段,其中较为成熟的编码方法如汉明码、奇偶校验码、循环冗余码等编码技术,被广泛应用于计算机、电子通信、控制等领域。
其中汉明码是一种能够纠正一位错误且编码效率较高的线性分组码。
由于它的编译码在工程上较易实现,所以应用广泛。
与其他的错误校验码类似,汉明码也利用了奇偶校验位的概念,通过在数据位后面增加一些比特,可以验证数据的有效性。
利用一个以上的校验位,汉明码不仅可以验证数据是否有效,还能在数据出错的情况下指明错误位置。
在接受端通过纠错译码自动纠正传输中的差错来实现码纠错功能,称为前向纠错FEC。
在数据链路中存在大量噪音时,FEC可以增加数据吞吐量。
通过在传输码列中加入冗余位(也称纠错位)可以实现前向纠错。
但这种方法比简单重传协议的成本要高。
汉明码利用奇偶块机制降低了前向纠错的成本。
软件实现下面给出基于最常用的MCS-51单片机汇编语言的汉明码测试程序。
它的有效信息占到了总编码长度的70%,测试程序中自动生成11个字节的原始数据。
原始数据块的长度、存放地址可根据实际情况由用户自己确定,只要将本测试程序的汉明码编码、解码子程序嵌入用户应用程序中,就可直接使用。
本课题就是研究利用C8051F系列单片机来实现(7,4)汉明码的编码。
关键词:单片机;线性分组码;(7,4)汉明码C8051F series MCU(7,4)hamming code encodingABSTRACTIn today's and future information society, digital communication has become an important means of information transmission, the global digital has become a major trend in today's world. However, the digital signal in the transmission process, the additive noise, intersymbol interference, and this will result in error, channel coding, therefore need to reduce the error rate and improve the reliability of digital communications. With the error control coding techniques flourished as the transmission channel interference and effective means by which the more mature coding methods, such as Hamming codes, parity bits, cyclic redundancy code and other coding techniques are widely used in computers, electronics communication, control and other fields. Hamming code which is able to correct a mistake and the code more efficient linear block codes. Encoding and decoding in the project because of its easier to achieve, so widely used. With other similar error check code, Hamming code parity bit also use the concept, followed by an increase in the number of bits of data bits, the validity of data can be verified. Use more than one parity bit, Hamming codes can not only verify the data is valid, but also in the caseof data error location specified in the error. By error correction decoding in a receiver automatically correct the transmission errors to achieve error correction code, known as forward error correction FEC. There are a lot of data-link noise, FEC can increase data throughput. Transmission code in the column by adding redundant bits (also known as error correction bits) can be achieved FEC. However, this method than a simple retransmission protocol to the high cost. Hamming code parity block mechanism reduces the use of forward error correction costs. Software are given below based on the most popular MCS-51 microcontroller Hamming code assembly language test program. It accounts for effective information length of 70% of the total coding and testing program automatically generates 11 bytes of raw data. The length of the original data block, or hold the actual situation according to the user to determine if the Hamming code of the test program encoding and decoding routines embedded in user applications, can be used directly.This topic is to study the use of C8051F MCU to achieve (7,4) hamming code encoding.Keywords:MCU;linear block codes; (7,4) hamming code目录第1章绪论 (1)第2章实验的软硬件环境 (2)2.1 VHDL语言的概述 (2)2.1.1 VHDL语言的发展历史 (2)2.1.2 VHDL语言的特点 (2)2.1.3 VHDL语言的开发流程 (3)2.1.4 VHDL的程序结构 (4)2.1.5 逻辑芯片的分类 (5)2.2 MAX+plusⅡ的使用 (9)第3章基于CPLD的PCM解码电路的设计 (11)3.1 PCM的概述 (12)3.2 解调PCM码的基本原理 (17)3.2.1 位同步的实现 .................................................................. 错误!未定义书签。
3.2.2 帧同步的实现 .................................................................. 错误!未定义书签。
3.2.3 字同步及PCM码串并转换............................................ 错误!未定义书签。
3.2.4 模块综合 .......................................................................... 错误!未定义书签。
3.3 分析与总结 ................................................................................ 错误!未定义书签。
总结 (29)致谢 (30)参考文献 (31)第1章绪论在简要介绍汉明码编码原理的基础上,详细分析干扰对汉明码纠错的影响;通过对汉明码重新组织排列,在不增加代码冗余的前提下,提高汉明码抗突发干扰的能力,为汉明码在实际中的应用提供新的思路;给出基于单片机的汇编语言汉明码测试程序。
纠错引言汉明码是在原编码的基础上附加一部分代码,使其满足纠错码的条件。
它属于线性分组码,由于线性码的编码和译码容易实现,至今仍是应用最广泛的一类码。
在实际应用中常常存在各种突发干扰,使连续多位数据发生差错。
为了纠正3个以上的差错,就要加大码距,使代码冗余度大大增加,通信效率下降。
本文所介绍的方法,就可以在不加大码距的同时,提高汉明码对突发干扰所产生差错的纠错能力,纠正多位连续的差错。
用汉明码对连续多位差错纠正的实现要想在不加大码距的前提下,纠正连续多位差错,提高抵抗突发干扰的能力,可根据校验矩阵得出的汉明码重新进行组织排列。
通信中,一般可分为异步、同步两种方式。
在异步传输中起始位和停止位是由硬件电路产生的,如果干扰使起始位或停止位发生了改变,那么即使程序有跨字节纠错的能力也是无用的。
对于同步方式则是可行的,因为在发送接收双方取得同步后,数据块的每个字符间取消了起始位和停止位。
常用的串口通信一般采用异步传输方式,能保证纠正连续1个字节的差错就可以了。
我们也要看到,这样处理后提高了汉明码对突发干扰差错的纠错能力,却牺牲了对随机干扰纠错能力。