MR-J3-A系列伺服放大器培训教程
三菱电机伺服培训

无 : 三 相 AC200V﹑ 单 相 AC230V﹑ 1:单 相 AC100V
A:标 准 脉 冲 序 列 、 模 拟 I/F B:SSCNET 10,20,40,70, 60,100,200,350,500,700 伺服放大器系列名
轴端加工
K :键 槽 D :D 切 口
减速器:
G1,G5/7
电磁制动器
编码器的种类和结构
项目
增 量 编 码 器 ( Incremental Encoder)
输出内容
输出相对值 针对旋转角的变化量脉冲
停止时的应对 接通电源时需要原点复归动作
价格
结构较简单,价格低
绝 对 编 码 器 ( Absolute Encoder) 输出绝对值 输出旋转角度的绝对值
接通电源时无需原点复归动作 结构较复杂,价格高
AD75P1-P3 QD75P1-P4
定位模块
AD75M、 A1SD75M
驱动器和 电机
MR-C-A MR-J2-Jr-A
模拟量信号
MR-J2S-A MR-J2-A
MR-H-AN
脉冲串
MR-H-KAN4
运动控制器 (最 大 32轴 )
SSCNET
MR-J2S-B MR-J2-B
MR-H-KBN4
MR-H-BN
逆变回路 生成适合马达转速的频率、适合负 载转矩大小的电流,驱动马达。 逆 变 模 块 采 用 IGBT开 关 元 件 。
PDF created with FinePrint pdfFactory trial version
控制回路运行原理
由位置控制环、速度控制环、电流控制环组成。
2
3
4
PDF created with FinePrint pdfFactory trial version
三菱通用伺服系统培训教程

伺服放大器性能简介
MR-H
MR-J2S
MR-E
50W-55KW 模型自适应控制 在线自调整方式 串行指令系统 (-H□B) 单轴位置控制器 (-H□AC) CE标志,UL认证
30W-7KW 和MR-J2系列兼容 高响应速度 17位ABS编码器 RS232C/RS422通讯 接口 丰富的软件功能 全闭环系统(开发中)
上位控制系统—三菱电机产品
➢ 4轴及以上系列控制
PLC模块: QD75P4,QD75M4 QD70P4,QD70P8
运动控制器: A171SH,A172SH A173UH,A273UH
运动控制CPU:Q172CPU,Q173CPU
三菱电机伺服放大器分类
MR-C 系列 MR-J2/J2S 系列 MR-H 系列 MR-E 系列 MR-J3 系列
容量范围:30----400W 通用型,位置控制 实时增益自动调整功能
容量范围:50-----7000W 通用型,优良性价比 实时增益自动调整功能
容量范围:50W—55KW 通用型,宽广功率范围 低噪音运行
容量范围:100W—2KW 通用型,高水平自动调谐 自适应振动抑制控制
容量范围:50W----3.5KW 实现高速度、高精度 紧急调谐功能
FX PLC
FX PLC
FX系列 PLC
10GM
ห้องสมุดไป่ตู้定位模块
20GM
1PG
A/Q 系列 PLC
AD75P1P3
QP4D7定5P位1-模块
AD75M、 A1SD75M
运动控制器 (最大 32轴)
SSCNET
驱动器和 电机
MR-J2-Jr-A
MR-C-A
模拟量信号
与MR-J3伺服通讯

与MR-J3伺服通讯参数设置:波特率:9600bps起始位:1位数据位:8位校验位:1位(偶校验)停止位:1位通信协议:半双工通信方式站号:0号(PC20=0,PC21=0000)一、外部输入输出信号状态(DIO诊断)1.输入软元件的状态发送:01 30 31 32 02 30 30 03 46 38返回:02 30 41 30 30 30 39 30 30 30 36 03 30 332.外部输入针脚状态的读出发送:01 30 31 32 02 34 30 03 46 43返回:02 30 41 30 30 30 30 30 31 34 46 03 30 463.读出通过通信置ON的输入软元件的状态发送:01 30 31 32 02 36 30 03 46 45返回:02 30 41 30 30 30 30 30 30 30 30 03 46 344.读出外部输出针脚状态发送:01 30 31 32 02 43 30 03 30 42返回:02 30 41 30 30 30 30 30 30 33 46 03 30 445.读出输出软元件的状态发送:01 30 31 32 02 38 30 03 30 30返回:02 30 41 30 30 30 30 30 34 32 44 03 30 45二、软元件的ON/OFF1.转速控制模式下-SON、LSP、LSN、SP2、ST2置为ON发送:01 30 39 32 02 36 30 30 30 30 30 31 32 30 37 03 39 30返回:02 30 41 03 37 342.转速控制模式下-LSP、LSN、SP2、ST2置为ON,SON置为OFF发送:01 30 39 32 02 36 30 30 30 30 30 31 32 30 36 03 38 46返回:02 30 41 03 37 34三、输入输出软元件(DIO)的禁止与解除1.DI禁止发送:01 30 39 30 02 30 30 31 45 41 35 03 45 41返回:02 30 41 03 37 342.DI解除禁止发送:01 30 39 30 02 31 30 31 45 41 35 03 45 42返回:02 30 41 03 37 343.DO禁止发送:01 30 39 30 02 30 33 31 45 41 35 03 45 44返回:02 30 41 03 37 344.DO解除禁止发送:01 30 39 30 02 31 33 31 45 41 35 03 45 45返回:02 30 41 03 37 34四、状态显示1.状态显示的名称和单位的读出00 反馈脉冲累积发送:01 30 30 31 02 30 30 03 46 36返回:02 30 41 20 20 70 75 6C 73 65 50 75 6C 73 65 20 46 2F 42 03 42 44 01 伺服电机的转速发送:01 30 30 31 02 30 31 03 46 37返回:02 30 41 20 20 72 2F 6D 69 6E 53 70 65 65 64 20 46 2F 42 03 36 31 02 滞留脉冲发送:01 30 30 31 02 30 32 03 46 38返回:02 30 41 20 20 70 75 6C 73 65 44 72 6F 6F 70 20 50 6C 73 03 33 30 03 指令脉冲累积发送:01 30 30 31 02 30 33 03 46 39返回:02 30 41 20 20 70 75 6C 73 65 50 75 6C 73 65 20 43 6D 64 03 31 41 04 指令脉冲频率发送:01 30 30 31 02 30 34 03 46 41返回:02 30 41 20 20 20 6B 70 70 73 50 75 6C 73 65 20 46 72 71 03 45 34 05 速度指令电压发送:01 30 30 31 02 30 35 03 46 42返回:02 30 41 20 20 20 76 6F 6C 74 53 70 65 65 64 20 43 6D 64 03 42 45 06 模拟量转矩限制电压发送:01 30 30 31 02 30 36 03 46 43返回:02 30 41 20 20 20 76 6F 6C 74 54 72 71 20 4C 69 6D 69 74 03 45 46 07 再生负载率发送:01 30 30 31 02 30 37 03 46 44返回:02 30 41 20 20 20 20 20 20 25 52 65 67 6E 20 4C 6F 61 64 03 38 35 08 实际负载率发送:01 30 30 31 02 30 38 03 46 45返回:02 30 41 20 20 20 20 20 20 25 45 66 66 63 20 4C 6F 61 64 03 36 44 09 最大负载率发送:01 30 30 31 02 30 39 03 46 46返回:02 30 41 20 20 20 20 20 20 25 50 65 65 6B 20 4C 6F 61 64 03 37 45 0A 瞬时输出转矩发送:01 30 30 31 02 30 41 03 30 37返回:02 30 41 20 20 20 20 20 20 25 49 6E 73 74 6E 20 54 72 71 03 42 43 0B 1转内位置发送:01 30 30 31 02 30 42 03 30 38返回:02 30 41 20 20 70 75 6C 73 65 43 79 63 20 70 6F 73 69 74 03 34 42 0C ABS计数器发送:01 30 30 31 02 30 43 03 30 39返回:02 30 41 20 20 20 20 72 65 76 41 62 73 20 63 6F 75 6E 74 03 41 30 0D 负载惯量比发送:01 30 30 31 02 30 44 03 30 41返回:02 30 41 20 20 20 20 20 20 20 4D 6F 6D 65 6E 74 20 52 74 03 41 41 母线电压0E 发送:01 30 30 31 02 30 45 03 30 42返回:02 30 41 20 20 76 6F 6C 74 20 50 2D 4E 20 56 6F 6C 74 20 03 34 39 2.状态显示数据的读出80 反馈脉冲累积发送:01 30 30 31 02 38 30 03 46 45返回:02 30 41 30 30 30 30 43 36 41 45 37 37 36 44 03 31 4281 伺服电机的转速发送:01 30 30 31 02 38 31 03 46 46返回:02 30 41 30 30 30 30 46 46 46 46 46 46 39 35 03 34 36 82 滞留脉冲发送:01 30 30 31 02 38 32 03 30 30返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 83 指令脉冲累积发送:01 30 30 31 02 38 33 03 30 31返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 84 指令脉冲频率发送:01 30 30 31 02 38 34 03 30 32返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 85 速度指令电压发送:01 30 30 31 02 38 35 03 30 33返回:02 30 41 30 30 33 30 46 46 46 46 46 46 46 43 03 36 34 86 模拟量转矩限制电压发送:01 30 30 31 02 38 36 03 30 34返回: 02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 87 再生负载率发送:01 30 30 31 02 38 37 03 30 35返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 30 03 42 34 88 实际负载率发送:01 30 30 31 02 38 38 03 30 36返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 35 03 42 39 89 最大负载率发送:01 30 30 31 02 38 39 03 30 37返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 39 03 42 44 8A 瞬时输出转矩发送:01 30 30 31 02 38 41 03 30 46返回:02 30 41 30 30 30 30 30 30 30 30 30 30 30 31 03 42 35 8B 1转内位置发送:01 30 30 31 02 38 42 03 31 30返回:02 30 41 30 30 30 30 30 30 30 30 38 39 31 35 03 43 42 8C ABS计数器发送:01 30 30 31 02 38 43 03 31 31返回:02 30 41 30 30 30 30 46 46 46 46 45 35 31 32 03 32 398D 负载惯量比发送:01 30 30 31 02 38 44 03 31 32返回:02 30 41 30 30 32 30 30 30 30 30 30 30 34 36 03 43 30 8E 母线电压发送:01 30 30 31 02 38 45 03 31 33返回:02 30 41 30 30 30 30 30 30 30 30 30 31 33 35 03 42 44五、参数1.指定参数组基本设定参数(PA**)发送:01 30 38 35 02 30 30 30 30 30 30 03 43 32返回:02 30 41 03 37 34增益。
manual_伺服电机手册2(中文)
伺服放大器
DOCOM DICOM
DC24V
伺服放大器
DOCOM DICOM
DC24V
控制输出
信号
RA
控制输出
信号
RA
(3) 试运行和调试
注意
在操作之前,请检查参数设置。不正确的设置可能导致部分机器执行不可预知的操作。 不能过度改变参数设置。操作将不稳定。
(4) 使用
注意
提供外部紧急停止电路确保能够立即停止操作并切断电源。 必须由合格的技术工程师进行拆卸作业以及维修工作。 在报警复位前,确保输入到伺服放大器的运行信号为断开以防止事故。如果运行信号接通时报警复位将发生 突然再起动。 不要改装设备。 采用噪声滤波器等使电磁干扰的影响最小化,电磁干扰可能由伺服放大器附近的电子设备引起。 使用带指定伺服电机的伺服放大器。 伺服电机上的电磁制动用于保持伺服电机轴,不能用于一般制动。 对于服务寿命和机械结构(如丝杠和伺服电机通过定时带 连接)等原因, 电磁制动可能不保持伺服电机轴。 为了确保安全,在机器侧安装停止装置。
在紧急(强制)停止期间电 路必须为断开。
伺服电机
RA EMG 24VDC
电磁制动器
出现任何报警时,排除原因,确保安全,在重新起动操作之前不能激活报警。 当瞬时电源中断后恢复电源时远离机器,因为机器可能突然起动(机器设计时考虑如果重新起动时保证安全)。
(6) 维护,检查和部件更换
注意
伺服放大器的电解电容将会老化。为防止由于故障而产生的二次事故,建议在用于一般环境中时,电解电容 每 10 年更换一次。 请咨询我们的销售代表。
2. 防止火灾
注意
不要将伺服放大器、伺服电机以及再生电阻安装在易燃物质上或靠近易燃物质。否则,可能导致火灾。 当伺服放大器发生故障时,切断主伺服放大器侧的电源。持续的大电流可能导致火灾。 当使用再生电阻时,如果出现错误的信号,切断主电源。否则,再生电阻故障或类似故障可能使再生制动电 阻过热,导致火灾。
最新MR-J3伺服应用例子参数
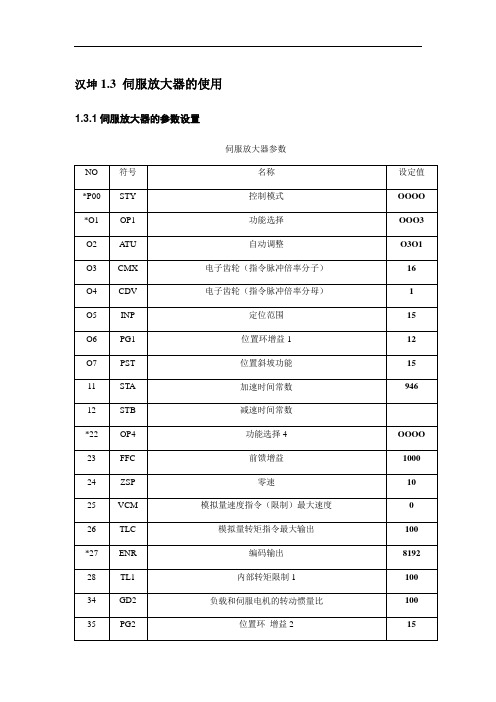
汉坤1.3 伺服放大器的使用1.3.1伺服放大器的参数设置伺服放大器参数注:以上参数仅供参考,详细细节请查阅伺服放大器说明书1.3.2 伺服电机的控制伺服电机正常运行必须具备的条件:1、LSP、LSN必须处于常闭状态2、ALM、EMG处于常闭3、SON为1时电机才能运动,此时电机处于制动状态,推不动,SON为0,可以推动电机。
4、CN1A、CN1B、编码器插头必须正确插入到伺服放大器上。
注:LSP、LSN、SON如果硬件条件不满足,可以在伺服控制器内部设置成1。
但是在系统正常运行后,必须采用外部硬件来满足,不可采用内部置1。
伺服放大器电子齿轮比的设定:即NO3,NO4的设定,该系统中,NO4设定为1,NO3=131072/NO27.1.3.3 伺服电机常见的问题●伺服放大器的的参数NO.2一般设置为0201即自动调整模式,此时相应NO.6,NO35,NO36,NO37,NO38的参数自动调整,如果在运动过程中电机发出嗡嗡的响声,可能是伺服放大器的参数设置不当所致。
可把伺服放大器的参数NO.2该为0301手动模式,手动调整各个参数。
●由于伺服电机是靠脉冲控制,所以要尽量避免变频器干扰。
变频器选型时可考虑增加虑波器。
●调试过程中如果发现小车运动的反向与实际反向不符时,即电机正向,实际为反向,电机反向实际为正向,此时修改伺服放大器的NO.54 改变伺服电机的旋转反向。
注:其他报警请参阅伺服放大器说明书。
说明书已经很详尽的将所有可能出现的报警列出以及其排除故障。
1.3.4伺服电机的接线定位模块FM353实现伺服电机的定位。
其引脚定义如下。
伺服放大器CN1A接线颜色定义线型:6对双绞加一对双绞带屏蔽,外加总体屏蔽。
伺服放大器CN1B接线颜色:线型:6对双绞加一对双绞带屏蔽,外加总体屏蔽。
建议将EMG.No.15与SERVO ALRAM No.18采用双绞。
LSP No.16与LSN No.17采用双绞。
1.电源线航空插头:线型:YZ3×4+1×2.5 (自带10米电缆)2.伺服电机放大器编码器电缆规格:MR-JHSCBL-10M-L(自带的10米电缆)线型:8芯0.25多股双绞带屏蔽。
三菱电机伺服培训课程讲义(基础概念)
运动控制器 (最大 32轴)
FX系列PLC
控 制 (I/O)
10GM 20GM
定位模块
AD75P1-P3 QD75P1-P4
运动控制 (位置控制)
1PG
定位模块
AD75M、 A1SD75M
SSCNET
MR-C-A
MR-H-KAN4
MR-J2S-A MR-J2-A MR-H-AN
2
1.2、脉冲串定位系统框图
脉冲串
编码器反馈
其它控制器
* 日本最常用的模式 * 易于产品支持 * 高位置环增益(半闭环)
讲义 – Copyright © 2005 三菱电机上海FA技术服务中心 – All Rights Reserved
3
第二章 三菱伺服产品概要
人机界面
HMI
GPP PC
A/Q 系列 PLC
3、大容量------电源再生方式
讲义 – Copyright © 2005 三菱电机上海FA技术服务中心 – All Rights Reserved
15
3.1、伺服放大器的组成--主回路
4、动态制动器 动态制动器具有在基极断路时,在伺服马达端 子间加上适当的电阻器进行短路消耗旋转能,使 之迅速停转的功能。
26
放大器容量 10、20、40、60、 70、100、200、 350、500、700 11k、15k、22k、 30k、37k
无:标准型,EN兼容 UL:UL兼容 无:三相200V 1:单相100V
A:标准型 B:SSCNET型 C:单轴定位 内置型
10
讲义 – Copyright © 2005 三菱电机上海FA技术服务中心 – All Rights Reserv 2005 三菱电机上海FA技术服务中心 – All Rights Reserved
三菱伺服试培训教材

三菱伺服培训教材第一章概要1.1 运动控制器的特点1.2.1 实模式概略1.2.2 实模式框图1.3.1 虚模式概略1.3.2虚模式框图1.4系统建立步骤1.5小结1.1 运动控制器的特点1、QPLC CPU 和多CPU系统复杂的伺服控制由Q MOTION CPU 模块进行处理,其他的机械控制,过程控制由QPLC CPU负责2、符合多用途的产品Q172CPU 1~8轴的多轴定位功能Q173CPU 1~32轴的多轴定位功能3、可与伺服放大器进行高速的串行通讯通过SSCNET网络进行高速通讯,可进行伺服数据收集、参数变更、伺服测试、伺服监控、机械言程序监控。
4、可实现绝对位置系统通过带有绝对位置编码器的伺服马达可以实现绝对位置定位。
5、操作系统(OS)可变更根据不同的工艺控制要求,可以选择对应适用的OS版本•SV13 用于搬运及组装。
如搬运机、注塑机、涂装机等•SV22用于自动机。
如同步控制,食品、包装等•SV43用于机床行业•SV51用于机械手6、凸轮软件(仅用于SV22)将机械机构中常用的凸轮机构以伺服马达控制,变换为虚拟模式的凸轮输出。
7、机械支持语言(仅用于SV22)将运动从原来的机械性的整合解放出来,通过软件对机械机构的运动控制器进行处理,从而执行伺服马达的控制,可以提高定位控制的功能和性能,通过电气化的方式减少机械结构上的制约,达到更合理的设计效果。
减少系统成本。
1.5小结第二章功能说明2.1 运动控制器规格2.2运动控制器的系统配置2.2.1 Q173CPU2.2.2 Q172CPU2.2.3 Q172LX/EX2.2.4 Q173PX2.3小结2.3小结本章主要说明的Q运动控制器系统的硬件组成、Q172/Q173CPU之间的功能比较以及运动控制器专用模块的功能说明第三章多CPU系统3.1多CPU系统概述3.2多CPU的安装位置3.2.1多CPU输入输出编号3.3 共享存储器的自动刷新3.4 多CPU运动控制器专用指令3.4 .1 SFC程序启动命令SFCS3.4 .2 SFC程序启动命令SVST3.4 .3 值变更命令CHGA/CHGV/CHGT3.4 .4 软元件读取/写入DDWR/DDRD3.5 小结3.1多CPU系统概述多CPU系统将多台(最多4台)QPLC CPU/Q Motion CPU 安装在基板上,由各QPLC CPU/ Q Motion CPU 对输入输出模块,智能模块进行控制的系统。
(完整版)三菱伺服培训教程

试运行
常见问题解决方法
在参数设置完成后进行试运行,观察电机 运行是否平稳、准确。
针对调试过程中出现的常见问题,如电机 不转、速度不稳定等,检查接线、参数设 置等方面,逐一排查并解决问题。
编码器原理及应用
04
编码器类型及特点分析
01
增量式编码器
输出脉冲信号,通过计数设备来知道其位置,具有无限 的分辨率。
应用领域
三菱伺服系统广泛应用于机床、自动化设备、机器人、航空 航天等领域,为各种高精度、高速度、高稳定性的控制需求 提供解决方案。
市场需求
随着制造业的转型升级和智能制造的快速发展,伺服系统的 市场需求不断增长。同时,客户对伺服系统的性能、稳定性 、可靠性等方面的要求也越来越高,需要厂商不断提升产品 品质和服务水平。
伺服系统基本原理
掌握伺服系统的构成、工作原理 及性能指标等基础知识。
伺服系统故障诊断与排除
了解伺服系统常见故障类型及原 因,掌握故障诊断与排除的基本 方法。
行业发展趋势分析
智能化发展
随着工业4.0和智能制造的推进 ,伺服系统将更加智能化,实 现自适应、自学习、自优化等
功能。
高精度、高速度
为满足高端装备制造的需求, 伺服系统的精度和速度将不断 提高。
方向检测
通过识别编码器输出的脉 冲的相位来判断电机的旋 转方向。
编码器选型、安装与调试技巧
01
选型技巧
根据实际需求选择合适的编码器类型、分辨率、输出信号等参数。
02
安装技巧
确保编码器安装牢固,避免振动和冲击对其造成影响;正确连接编码器
的电缆,避免接错或接触不良。
03
调试技巧
在调试过程中,要注意观察编码器的输出信号是否正常,检查其与控制
伺服教材-J3A

整定/机械特性确认
采集数据 : 0.4ms x 30000点=12sec (J2S : 0.8ms x 1024点)
27
3.3 伺服设置软件介绍
速度 – 力矩 曲线监控功能
速度 / 力矩曲线数据监控 在操作模式中可以确认力矩余量
短時間運転領域 連続運転領域
实际运行曲线
28
3.4 容量选型软件介绍
中,从原来的指令+1减去1脉冲的震 荡,计数器值成为0 ⑥结果使DA转换输出0V到放大器, 放大器使马达停止 ⑦完成1脉冲的定位
10
1.3.1 伺服放大器控制回路
速度控制处理流程
① 模拟量形式的速度指令进入速度 运算器,使电机开始运行
② 电机运行后使用编码器旋转,发出 脉冲反馈
③ 脉冲反馈经过FV转化为相应的模拟 量进入伺服驱动器
思考:伺服电机与普通三相异步电机的区别?
连续运转区域
瞬时运转区域
7
1.2.2 伺服电机
• 编码器种类和结构
8
1.3.1 伺服放大器控制回路
• 伺服控制回路
位置环
电流环
速度环
9
1.3.1 伺服放大器控制回路
位置控制处理流程
假设脉冲指令为1个脉冲,输入时动作为: ①偏差计数器成为+1 ②转变为1个脉冲对应的电压进入放大器 ③放大器产生SPWM波驱动马达旋转 ④编码器也相应旋转,发出1脉冲的震荡 ⑤1脉冲的震荡再次输入到偏差计数 器
通讯连接
USB1.1 通用接口
MR-J3-A 和 B系列 更快的响应速度 实时数据采集提高了20倍以上
USB USB
USB mini-B
USB B
与运动控制器的连接
(完整版)三菱伺服培训教程

位置指令减速时间设置
内部速度指令(多段速)
多段速接线控制
速度转矩加减速时间
NO.13 s加减速
NO.13 s加减速参数
NO.14转矩指令时间常数
NO.15站号设定
422通讯模式接线
232模式通信连接
232通信接线1
NO16波特率选择、报警清除
伺服放大器站号有无
通信协议报文格式
内部转矩限制NO.28
模拟量速度偏置(出厂已设置好)
模拟量转矩偏置
模拟量输出通道偏置
电磁制动延时NO.33
负载伺服转动惯量比NO.34
NO.35位置环增益2
速度环增益
速度积分、微分补偿
微分
输入信号自动置位NO.41
控制模式切换NO.42
多功能引脚参数设置
cn1b-5针脚参数设定
三菱伺服培训
一、硬件接线
伺服主电路三相电接线图
伺服单相电源供电接线
伺服放大器与伺服电机接线
伺服系统的接地
伺服内部线路
数字接口接线原理——源型输入
数字接口接线原理——漏型输入
数字输出电感负载接线
数字输出电灯负载接线
位置控制接线
差分脉冲接线
模拟量输入
模拟量输出
编码器集电极输出
两路模拟量输出格式NO.17
NO.18状态显示设置
当第一位设置为零后第二位的各模 式显示
参数显示例子
三、扩展参数1
NO.20
脉冲波形选择NO.21
脉冲波形详解
速度位置控制正反转极限碰到停止 方式
前馈增益NO.23
零速设定NO.24
模拟量最大转速限制
模拟量最大转矩百分比设置
输出脉冲数设置NO.27
三菱电机伺服系统(培训)

NO.0
NO.1
NO.31
1根总线上最多可带32台伺服放大器,站号从0-31
·伺服设置软件 MR Configurator
MR-J2S SETUP151E 用于MR-J2S MR-E SETUP154E 用于MR-E 基本功能 监控电机运行情况,同时还可以采集数据构成曲线图
轻松设定伺服参数,同时 还有诊断功能
· MR-J2S-B的特
点
SSCNETⅡ高速串行总线连接型,指令传输速度为 可10连M接bp支s持SSCNET网络的控制器实现高速复杂精确动作
Q系列定位模块QD75M
Q172/173CPU运动控制器
连接方便,便于设备安装调试
集成的控制器软件,方便系统进行参数和定位数据设置
·SSCNET与传统接线方式比
0
0.5
1
1.5
2
设定运行速度和加减速时 间做试运行
设定运行位移做定位运行
高级功能
机械分析功能
增益 相位
共振点 30秒内快速完成共振点的检测
机器模拟功能
速度命令 位置增益1
自动识别电机ID号 电机力矩限制
电机/机械特性
速度增益1
位置增益2 读取 写入
速度增益2 速度积分补偿
曲线图
·电机速度 ·滞留脉冲 ·速度命令 ·力矩
高速系列
HC-KFS46 6000 r/min HC-KFS410 10000 r/min
· MR-J2S-A的特点
通用脉冲串输入型,可选择3种脉冲输入波形 内置电子齿轮,可对定位指令进行调整 可连接FX系列PLC,脉冲发生器FX2N-1PG/10PG和定 位模块FX2N-10GM/20GM 也可连接A和Q系列脉冲输出型定位模块 A1SD75P/D,QD75P/D和QD70P4/8等 也可以连接其他品牌的PLC,但必须考虑接口电路问题
伺服基础培训资料全

放大器 力矩指令 +
(不可控制转速)
-
力矩控制
・负载扭矩>产生扭矩・・马达被动停止 ・负载扭矩=产生扭矩・・・・停止
Tl
+T Tps
-
0
・负载扭矩<产生扭矩・・・・马达自行控制停止
产生力矩
负载力矩
Tcmd
+ Vα
16
伺服电机的结构
转子
定子
轴承
刹车
感应器
马达轴
刹车〔可选
转子〔永久磁石
半导体设备
机械加工
机器人
成型机
一般工业设备
医疗器械
20
• 伺服系统之应用 • 数控机床的应用 • 同步能力,快速响应能力,低速稳态控制能力
; • 匹配NC控制器的能力,网络化能力等 • 中高端产品的供应商集中在西门子、Fanuc
等 • 主要是强调轨迹控制和插补控制能力.
21
• 伺服系统之应用 • 包装印刷行业的应用 • 同步控制能力,张力控制,网络化能力等; • 横切功能:飞剪、追剪等; • 电子凸轮功能 • 无轴〔电子轴传动技术,主要技术供应商为德国的博世力士乐、
27
• 案例二:排料
28
感谢聆听! Thanks
29
知识回顾 Knowledge Review
CNC 插补 指令
位置控制单元
+ -
位置控制调 节器
速度控制单元
+
-
速度控制 调节与驱动
机械执行部件
实际 位置 反馈
实际 速度 反馈
检测与反馈单 元
电机
8
指令信号 〔位置、速度、力矩
伺服马达
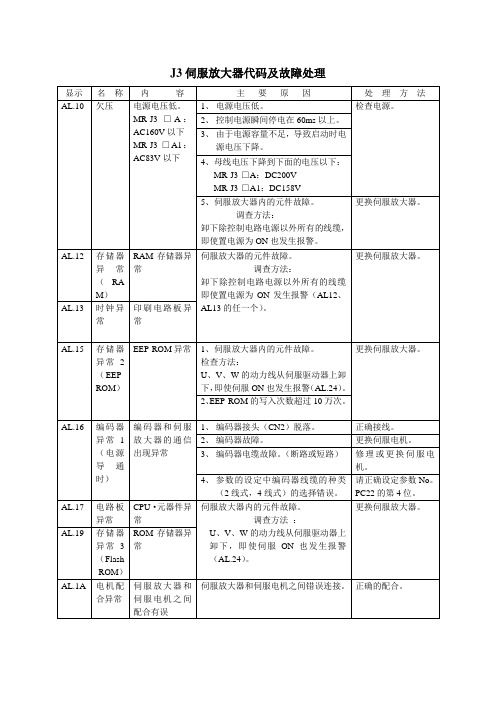
J3伺服放大器代码及故障处理
再生制动晶体管异常
6、再生制动晶体管发生故障。
检查方法:
1)、再生选件异常过热。
2)、即使卸下内置再生电阻或再生选择也报警。
更换伺服放大器。
显示
名称
内容
主要原因
处理方法
AL.31
过速
转速超过了瞬时允许速度
1、输入指令脉冲频率过高。
请正确设定指令脉冲
2、加减速时间过小导致超调过大。
1、伺服电机动力线(U、V、W)短路。
改正接线。
2、伺服放大器晶体管(IPM)故障。
调查方法:
拆下输出U、V、W相的接线,再使电源ON,也发生报警(AL.32)。
更换伺服放大器。
3、伺服放大器U、V、W的接地。
正确接线。
4、由于外来噪声的干扰,过流检测电路出现错误。
采用噪声对策。
AL.33
过压
转换器母线电压的输入值在DC400V以上
1、没有使用再生选件。
请使用再生选件。
2、虽然使用了再生选件,但参数No.PA02设为“□□00(不使用)”。
请正确设定。
3、内置的再生制动电阻或再生制动选件的导线断路或脱落。
1、更换导线。
2、正确连接。
4、再生制动晶体管故障。
更换伺服放大器。
5、内置再生制动电阻或再生选件的容量不足。
1、内置再生制动电阻时更换伺服放大器
请正确连接。
3、高频度或连续再生制动运行使再生电流超过了再生选件的允许再生功率。
检查方法:
通过状态显示器查看再生负载率。
1、降低定位频率。
2、更换容量更大的再生制动选件。
3、减小负载。
4、电源电压异常:
MR-J3-□A:AC260V以上
AI系列伺服放大器的连接上课讲义

2024/10/20
TRAINING-LZW
30
SPM
BEIJING-FANUC
2024/10/20
TRAINING-LZW
130
31
SPM
BEIJING-FANUC
2024/10/20
TRAINING-LZW
32
主轴传感器
BEIJING-FANUC
2024/10/20
TRAINING-LZW
JA7B
9 串行输出接口的连接器
JA7A
10 电机传感器的连接器
JYA2 Mi,MZi,BZi
11 脉冲编码器和一转信号的连接器 JYA3
12 分离型主轴传感器的连接器
JYA4 仅B型
13 电机电源的连接器
TB2
14 地线孔
警告:当LED灯亮的时候, 不要碰模块部件或连接电缆.电气 元件的振动有危险.
5 输出连接器
CXA2A
6 位置编码器和SPM间通讯的连接器 JX4 检测板输出信号
7 连接负载表和速度表的连接器
JY1 检测板输出信号
8 串行输入接口的连接器
JA7B
9 串行输出接口的连接器
JA7A
10 电机传感器的连接器
JYA2 Mi,MZi,BZi
11 脉冲编码器和一转信号的连接器 JYA3
12 分离型主轴传感器的连接器
警告:当LED灯亮的时候, 不要碰模块部件或连接电缆. 电气元件的振动有危险.
TRAINING-LZW
20
SPM结构
BEIJING-FANUC
2024/10/20
TRAINING-LZW
21
SPM结构
2024/10/20
永宏A3伺服产品培训-含基础知识

实物
遵命!!主人
a
4
第一章:伺服概述
1.2 伺服定义
•伺服系统:是使物体的位置、方位、状态等输出,能够跟随输入量 (或给定值)的任意变化而变化的自动控制系统。 •在自动控制系统中,能够以一定的准确度响应控制信号的系统称为随 动系统,亦称伺服系统。 •伺服的主要任务是按控制命令的要求,对功率进行放大、变换与调控 等处理,使驱动装置输出的力矩、速度和位置控制得非常灵活方便。
1.5伺服电机的结构
转子
转子
转子
感应器
轴承
马达轴 转子(永久磁石) 定子(线圈)
刹车(可选) 感应器
动力线 a 接口
编码器 线接口
14
1.6 伺服电机的编码器
第一章:伺服概述
作用:速度控制或位置控制系统的检测元件. 分类:增量型和绝对型。
类别:数字传感器
增量式编码器 将位移转换成周期性的电信号, 再把电信号转变成计数脉冲,用 脉冲的个数表示位移的大小。
a
5
第一章:伺服概述
1.3 自动控制应用举例:
生活中自动控制的例子
人根据杯子的水量、无意识地思考需要时间。
水量(少、一半、7成程度、 全满)
开关的关闭
需要时间(需要点時間;快点;慢慢地)
这个时候的人行动 扭开关 监视水龙头的水流 调节开关的大小 监视杯子里的水流 当目标水量接近时 关闭开关
水 道
二、命名规则
a
30
型号与规格表
二、命名规则
a
31
型号与规格表(续一)
二、命名规则
a
32
型号与规格表(续二)
二、命名规则
a
33
型号与规格表(续三)
三菱mrJE300伺服说明书
三菱mrJE300伺服说明书
MR-JE-300A三菱详细说明
1.常规接口的伺服放大器,多可对应4Mpps脉冲频率。
2.针对运动控制网络SSCNETⅢ/H的驱动器。
标配全闭环控制,可以驱动旋转伺服电机,直线伺服电机。
3.针对运动控制网络SSCNETⅢ/H的驱动器。
可同时驱动2台伺服电机,节省安装空间和接线。
标配全闭环控制,可以驱动旋转伺服电机,直线伺服电机。
专业提供三菱伺服编码器电缆:
MR-JCCBL5M-L/H,MR-JHSCBL5M-L/H
MR-J3ENCBL5M-A1-L/H,MR-J3ENSCBL5M-L/H
MR-ENCBL5M-L/H,MR-EKCBL5M-L/H,MR-ESCBL5M-L/H
电源电缆:MR-PWS1CBL5M-A1-L/H
电源接头:MR-PWCNK1,MR-PWCNK2,MR-ECNP1-B,MR-ECNP2-B,MR-ENCP1-B1,MR-ECNP2-B1
航空插头:MR-PWCNS1,MR-PWCNS2,MR-PWCNS3,MR-PWCNS4,MR-PWCNS5。
信号接头:MR-J2CN1,MR-J3CN1,MR-ECN1,MR-A-TM
端子台:MR-TB20,MR-TB50,A6TBXY36
端子电缆:
MR-J2TBL05M(可提供0.3-15米长度)
MR-J2M-CN1TBL05M(可提供0.3米-5米长度)MR-J2S-B驱动器通信电缆:
MR-J2HBUS05M(可提供0.3-30米长度)
MR-J3-B驱动器通信电缆:
MR-J3BUS03M(可提供0.3-30米长度)。
MR培训资料

MELSERVO-J3系列直线伺服放大器amp电机三菱电机株式会社名古屋制作所是获得了环境保护管理系统ISO14001和质量管理系统ISO9001认证的工厂。
实现高速高精度直线伺服电机采用直接驱动,因此具有高刚性。
全闭环系统可实现高精度运行。
可进行高速运行(2m/s)以往传统的传动机构不能达到这样高的运行速度。
当使用带SSCNETⅢ网络控制连接型的Q系列运动控制器控制直线伺服时,可轻松实现高精度同步运行和多头运行。
与MR-J3-B系列兼容,可构建高精度高响应系统,提高系统可靠性。
MR-J3-B的“鲁棒干扰补偿功能”可抑制由干扰所产生的速度偏移而导致的速度不均匀。
具有无铁芯和有铁芯两种类型兼容高性能伺服放大器MR-J3-BLM-H2 系列和LM-F系列(液冷型)具有紧凑的结构和强大的推力。
这些型号的直线伺服可应用于从半导体安装到物料传送系统等不同的领域。
LM-U2 系列属于无铁芯类型同样适用于大推力应用场合,共有9种类型电机可供选择。
该类型特别适用于在运行中要求无推力波动的系统,如丝网印刷机和检测机等。
运动控制器Q173DCPU Q172DCPUQ173HCPU Q172HCPUQD75MH直线伺服MR-J3-□B4-RJ004U□直线伺服电机LM-H2 系列LM-F 系列LM-U2 系列最大持续推力最大持续推力自冷持续推力液冷最大最大持续推力LM-H2有铁芯LM-F有铁芯LM-U2无铁芯推力(N)9 型号9 型号8型号101006096024005080060060003003000180003200100010000SSCNETⅢLM-H2LM-FLM-U21理想的多头系统同步驱动配置用于两个轴之间需要高精度同步运行的大推力场合。
在多头驱动系统中,可通过相互独立的控制指令来控制两个移动的电机线圈(初级侧线圈),因此可简化机械结构。
这种配置最适用于需要缩短运行节拍时间的系统中。
伺服设置软件-MR Configurator通过在个人电脑上安装并运行MR Configurator伺服设置软件可轻松的进行直线伺服系统的参数设置、增益调整、监视、诊断和试运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
交流伺服进阶课程
—MR-J3-A系列伺服放大器
1
AC
————
AC
——
AC
————
2
1.1 AC
AC AC
3
1.2.1
4
1.2.1 总 c
5
C件速/C般三
C件速/C般三=fc1/fc=例f0*近/fc*60
例c
pulse
fc
pps
例c1
pulse
fc1
例f
pulse
lo
mm/pulse
例f0
pulse/rev lc
mm/pulse
49
例c0
pulse/rev C件速
6.42
1
131072p/r 200khz
20000 mm/min
/
回
400 mm
t总
0.157 s
t0
1.5 s
tf
2.3 s
31
4.1 AC
32
4.1 AC
33
4.3
34
4.4
?
例A01 例C01 例C02 例C03 例C05~例C11 例C37 例C12
1.2.1
1 2)
0.4kw 0.4kw 11kw
3
11kw
d
分代B配 e
6
1.2.2
•
瞬时运转区域 连续运转区域
7
1.2.2
•
8
1.3.1
•
位置环
电流环
9 速度环
1.3.1
齿=配/密
齿
配
密
37
5.1 AC
配
配=过1*¢* Ia
符号说明:T:转矩 K1 :常数 ¢:磁通 Ia:电流
/
38
5.2 AC
1% 1/100
39
5.3
40
5.Biblioteka 1•0.032近 件
SSCNETⅢ 24
3.3
25
3.3
更精确的机械性能
・频率范围 ・・・ 10HZ~1KHz → 3HZ~4.5KHz
・检测能力得到很大提高
J2-Super
J3
26
3.3
历史查看功能
3通道 示波器
(历史数据重写功能)
15
3.1
• 件密-更3
件密-更3-
-
密更004 密更006
/3 200-230三AC
1
100-120三AC
4
400三AC
A
B
念念C近别配 分分分
配 CC 回分近过
10 100w
16
3.1
• 件密-更3
用-系
过 般般 更
B r/min
kw
A/B
47
6.4.2
48
6.42
Pc1=Pc*(CMX/CDV)
fc1=fc*( CMX/CDV)
lo=例坐/例fo 例c0* C件速/C般三 =例f0 lc =例坐/例c0=例坐/例f0* (C件速/C般三)= lo*
lc = lo* C件速/C般三
密念1
密念2
例A01 例C01 例C02
41
5.42
例C05
1 例C06 念例1 念例2
2 例C07
3
800r/min 1200r/min 1600r/min
42
5.43
例C13 配回C 8v
例C38 配例口
配C
0v
50%
0.03v
例C38
43
6.1 AC
位置控制 控制器
伺服 驱动器
伺服马
达
编码器
44
6.2 AC
JL/JM
N=fp* CMX/CDV *60/Pt
fp
CMX/CDV
Pt
45
6.3
46
6.3
例A13 +
实际运行曲线
28
3.4
选型软件MOTSZ111E
29
3.4
30
3.4
MR-J3
生配
200 过g
生回
50 过g
齿c
0.01 近
1/n
1
更回
10.47 kgc
例B
10 mm
般B
20 mm
回B
1500 mm
三0
调C-件例
调C-过例
调C-念例
调C-密例
调C-回例
17
调C-切例
3.2
•
别件C
18
19
20
21
up down
22
63
64
65
同时监控指令/滞留脉冲/力矩
整定/机械特性确认
曲线图
采集数据 : 0.4ms x 30000点=12sec (J2S : 0.8ms x 1024点)
27
3.3 速度 – 力矩 曲线监控功能
速度 / 力矩曲线数据监控 在操作模式中可以确认力矩余量
短時間運転領域 連続運転領域
3.3
软件系统
编程
设置
选型
23
3.3
件密-Configur总tor setup221别
通讯连接
度容度
MR-J3-A 和 B系列 更快的响应速度 实时数据采集提高了20倍以上
USB USB
USB mini-B
USB B
与运动控制器的连接
MR-J3-B
只需一根线就可以连接所有伺服
1s 0s 500r/min 800r/min 1200r/min
念
1.
2.
3.
4.
0v
5. 10v
7
? 念例3 50mv 2000r/min
35
4.4
?
PA11 PA12
1. 2.
=100% =100%
例A11/例A12
36
5.1 AC
7.11
54
7.12
3.5kw 0-45
5kw 75%
55
7.2
总
流
坐
例
c d
C 件
流 例 例* C件速/C般三 C
56
7.2
/
on
/
0v
LSP/LSN
OFF
0
/
0
57
7.3
1
+1
1
念例生件
1
1
+1 1
0
般A
0三
1
10
1.3.1
齿三
11
1.3.1
1
2 3
,
12
1.3.1
1 2 3 4
13
2.2
14
3.1
• 件密-更3
2 1 2 3
齿速2近-10代件
262144p/r
△l0=? 2um/p,
3000r/min
3000r/min
8mm 200khz
50
6.43
+/-
51
6.43
52
6.44
回口例
/
回口例
53
T=J*
T
J
J=JM+JL
JM
JL
JL/JM
15
58
7.4
10 2-3 2-3
10
59
8.1
/ 60
8.2
61
8.3
son on 例回C
62