松下伺服放大器的使用
松下伺服驱动器参数设置与常见故障解决分析

松下伺服驱动器参数设置与常见故障解决分析松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。
伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。
本项目即是用于定位控制。
松下伺服用于定位控制,下面几个参数需要熟悉并掌握设置方法:参数设置Pr0.00:伺服旋转方向切换。
常常有这样的情形,伺服驱动需要调换旋转方向,只需要将Pr0.00中的值由“1”改为“0”,或由“0”改为“1”(出厂值是“1”)。
Pr0.01:伺服控制模式的设置。
位置控制是缺省模式(Pr0.01=0),其他模式设置可参考如下:Pr0.07:伺服控制脉冲输入方式。
PLC发送高速脉冲给伺服驱动器,有几种方式,可以是正转一路脉冲,反转一路脉冲;也可以是只用一路脉冲,而增加一个方向控制信号(高低电平即可),当然也可以是90°相位差的2相脉冲,Pr0.07分别设为“1”、“3”、“0”或“2”。
可以看出除了设置为“3”只需一路脉冲就可实现定位控制,其他三者都需要两路脉冲,对于一个轴控制(即一套伺服系统)三菱PLC都没有问题,如果是两个轴控制,则必须将Pr0.07设置为“3”,缺省值为“1”,因此此参数一般都需要设置。
当然此参数与Pr0.06配合设置,可选择输入的脉冲极性。
Pr0.08:电机每旋转一圈所需要的指令脉冲。
此参数涉及到PLC 编程时,定位距离的精确控制,也就是PLC发多少个脉冲,伺服电机转一圈,电机带动丝杆旋转,丝杆的螺距假设是5mm,则PLC每发Pr0.08里设置的数值的脉冲(缺省为10000),丝杆带动运动平台将移动5mm。
参数Pr0.09和Pr0.10可实现同样的功能,适合于PLC脉冲数和移动距离不能整除的场合,其实掌握了Pr0.08,已经无往而不胜了。
Pr5.04:伺服定位,一般两端装有极限位的行程开关,如果装了,需要设置Pr5.04由“1”设置为“0”,否则行程开关将不起作用。
松下伺服几个参数需要熟悉并掌握设置方法

松下伺服几个参数需要熟悉并掌握设置方法
松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。
伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则
多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。
本
项目即是用于定位控制。
松下伺服用于定位控制,下面几个参数需要熟悉并掌握设置方法:
Pr0.00:伺服旋转方向切换。
常常有这样的情形,伺服驱动需要调换旋转
方向,只需要将Pr0.00中的值由”1”改为“0”,或由“0”改为“1”(出厂值是“1”)。
Pr0.01:伺服控制模式的设置。
位置控制是缺省模式(Pr0.01=0),其他模
式设置可参考如下:
Pr0.07:伺服控制脉冲输入方式。
PLC发送高速脉冲给伺服驱动器,有几
种方式,可以是正转一路脉冲,反转一路脉冲;也可以是只用一路脉冲,而
增加一个方向控制信号(高低电平即可),当然也可以是90°相位差的2相脉。
松下伺服电机A5用户手册日弘忠信讲解
松下伺服电机A5用户手册日弘忠信讲解您身边的传动专家日弘忠信,成立于1997年,是一家集品牌代理、产品配套、解决方案、工程服务于一体的运营服务商。
下面简单讲解关于松下伺服电机A5用户手册的相关事项:1、松下伺服电机A5安全注意事项:警告显示的种类与含义在进行安装、配线施工、保养、检查之前,请熟读本手册。
请您在对机器的知识、安全信息以及注意事项进行确认的基础上再进行使用。
本手册中,对安全方面的注意事项等级分为"警告" 和"注意"。
警告:如果错误使用,将导致发生危险状况,有可能会导致死亡或者重伤。
注意:如果错误使用,将导致发生危险状况,从而造成受到中度伤害及轻伤或造成物品的损失。
此外,即使是记述在注意中的事项,根据发生的状况也有可能导致严重的后果。
所记述的都是非常重要的内容,请务必遵守。
2、日弘忠信松下伺服电机A5的使用注意事项:•请绝对不要用手触摸伺服放大器内部。
否则会有触电的危险。
•伺服放大器以及松下伺服电机A5的地线端子请务必接地。
否则会有触电的危险。
•配线、检查时请在切断电源5分钟以上后并确认充电LED熄灭之后再进行。
否则会有触电的危险。
•尽管是在通电状态下但充电LED仍熄灭的情况下,则伺服放大器内部的保险丝可能已熔断。
请在切断电源5分钟后进行检查。
否则会有触电的危险。
•请勿损伤电缆、施于过度的压力、负载沉重物品或挤压。
否则将造成故障、损坏和触电。
•运行过程中,请勿触摸松下伺服电机A5的旋转部位。
否则将造成受伤。
•松下伺服电机A5和伺服放大器请按照指定的组合进行使用。
否则将造成火灾、故障。
•请正确进行配线。
否则将造成故障。
•请绝对不要在溅有水的地方、腐蚀性的环境下、易燃气体的环境下和可燃物的附近进行使用。
否则将造成火灾、故障。
•请注意伺服放大器、松下伺服电机A5以及周围设备的温度会升高。
否则将烫伤。
•通电状态下及切断电源后不久,伺服放大器的散热片、再生电阻器、松下伺服电机A5等有时会呈高温,请勿触摸。
松下伺服设置
18 指令脉冲禁止输入 无效设定
【 19
读取设定
分 20 位置设定单位选择
类 21 转矩限位选择
5】 22 第 2 转矩限制
○——○
○ ○ ○ ○ 4-45
准
○○○○
○——○
○ — — ○ 4-46
备
○——○
○——○
○ ○ — ○ 4-47
○○—○
3
12 输出选择 SO3
13
SO4
14
SO5
功 能
14
频率
第 1 抑振
15
滤波器设定
16
频率
第 2 抑振
17
滤波器设定
18
频率
第 3 抑振
19
滤波器设定
20
频率
第 4 抑振
21
滤波器设定
22
平滑滤波器
位置指令
23
FIR 滤波器
00 速度设置内外切换
01
方向指定选择
02 速度指令 输入增益
03
输入反转
04
第1速
05
第2速
06
第3速
07
第4速
【 分
【分类 5】扩展设定 ................................................................................................. 4-42
【分类 6】特殊设定 ................................................................................................. 4-51
松下伺服调试参数
松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制Pr0.02 设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
新手教程松下伺服快速入门

新手教程松下伺服快速入门伺服控制系统在各个行业应用越来越广泛,除了在工业机器人、机械加工、医疗机械、半导体等标准设备上大量使用外,在一些非标设备制造如食品加工、包装机械、印刷、挤压成型、搬运机械手等也有着越来越多的应用。
一、什么是伺服系统伺服系统也称为“随动系统”或“自动跟踪系统”,它是以机械量如位置、速度、力矩等作为被控量的一种自动控制系统。
伺服系统由专用的伺服驱动器和伺服电机构成雷达是典型的随动伺服系统伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把从上位机接收到的电信号转换成电动机轴上的角位移、角速度或转矩输出。
伺服电机分为交流伺服电机和直流伺服电机。
现在除了特殊用途,直流伺服基本上已经被性价比极高的交流伺服所取代。
伺服控制系统有三种主要的控制方式:位置控制、速度控制和转矩控制。
也可以两两结合控制(而步进控制系统通常只能用于位置控制、变频控制系统一般只能用于速度控制、力矩机控制系统只用于转矩控制)。
伺服系统因为集成了编码器,而且编码器的分辨率已经达到了2^23=8388608(以松下A6系列为例),理论上伺服电机旋转一圈可以通过8388608个脉冲来控制,因此控制精度达到了极高的程度。
数年前或者更早的时期伺服应用还不是特别广,是因为伺服系统的价格昂贵,10KW都需要近十万,而现在价格约为原来的十分之一,而性能又大大提高,所以才有广泛而快速的应用。
松下A6系列二、松下伺服驱动器的面板操作伺服系统让大家感到“高端”不好入门,就是它不像一般的控制器,浏览一下简易说明书就能操作。
伺服系统有着强大的功能的同时,却是相对复杂的操作。
初学者刚买回来的伺服系统即使主回路接线都正常完成,想试着让电机转起来还不是那么简单,必须要通过驱动器操作面板进行试运行(JOG)才可以。
伺服系统性能强大,比如发生了故障,驱动器中保存了发生故障的时间、代码,手册上即可根据代码查询故障解决方法;电机不转也类似,可查询到不转原因。
松下伺服增益参数调整说明 PPT
速度环增益(Speed loop gain)的效果:速度(speed)观测
速度环增益(speed loop gain)的效果:转矩(torque)观测
位置环增益的设定
与定位的迟滞有关,一般在速度增益的一半到2倍的范围内进行设定。 目标? 高刚性的机械 位置环增益设定= 速度环增益×2 低刚性的机械 位置环增益设定= 速度环增益×1/2 (如果负载的惯量比设定正确的情况) 由于设定的大、小产生的影响? 太小的话,定位时间长。 太大的话,发生振动,也会影响COIN信号输出。
共振点
截止频率: 关键点为驱动器控制速度环响应。
设定惯量比时,要与速度环增益一 致。 这里以110Hz为例,速度环的响 应区间 表示设定在110Hz的状态下。
反共振点
如果使用此项功 能,解析力将大 幅提高
・使用PANATERM分析频率功能,观察滤波器效果
下图的蓝线(黑白印刷比较图难以辨认)表示使用滤波器前,可能在200Hz付近共振点的振动状态。 红线表示使用滤波器后的波形,可以把握各滤波器的效果。
转矩滤波器
整体下降
陷波滤波器
该点下降
增益调整的实际运用
最后,总结了使用操作手册在实机上进行调整的实际操作。 此前,对增益进行了阐述。实际操作的调整,要和各种过滤器一起来抑制共振现象。此外,归根结底调整是与负载 匹配的过程。根据不同情况,改变调整方法,整体流程如下图所示。
开始
用出货值解析频率, 确认共振点等,然后设定各过滤器
④为了加快响应而提高增益
⑤产生控制体自身的振动(增益已不能再提高)
按照以上的步骤执行。
是
结 束
运转 OK?
机械钢性No.(Pr.22)下降
运转 OK?
松下伺服调试说明
Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
松下伺服A面板操作完整版

松下伺服A面板操作HEN system office room [HEN 16H-HENS2AHENS8Q8-HENH1688]按4次上键显示(反馈脉冲 按5次上键显示(指令脉冲 按13次上键显示dl5. oL 按9次下键显示d27・Pn (PNA5面板操作需要设定的参数二、监视器的观测1、驱动器上电后按一次设置键S 进入(电机转速),按3次上键显示(转矩指 令),再按一次设置键S 进入监控值状态;2、 驱动器上电后按一次设置键S 进入(电机转速), 总和),再按一次设置键S 进入监控值状态;3、 驱动器上电后按一次设置键S 进入(电机转速), 总和),再按一次设置键S 进入监控值状态;4、 驱动器上电后按一次设置键S 进入(电机转速), (过载率),再按一次设置键S 进入监控值状态;5、 驱动器上电后按一次设置键S 进入(电机转速),间电压),再按一次设置键S 进入监控值状态; 三、参数的修改1、驱动器上电后按一次设置键S 进入;2、 按一次模式键M 进入参数设定模式,通过上、下、左键选择所要修改的参数, 按设置键S 进入该参数的设定值;3、 把对应参数的设定值修改后,再按住设置键S 约2秒后,界面自动返回到对应 的参数设定模式PAr. ***;四、EEPROM写入模式1、在返回到对应的参数设定模式PAr. ***后,再按一次模式键M进入参数EEPROM 写入模式EE_SEt;2、按一次设置键S进入EEP -模式;3、再按住向上键约5秒后,显示EEP—-逐渐增加直到显示rESEt或Finish为止, 设置参数写入完毕。
五、JOG试运行方法1、驱动器上电后按一次设置键s进入;2、按3次模式键M进入辅助模式AF_ACL,按4次向上键直到出现AF_JOG:3、按一次设置键S进入JOG -模式;再按住向上键约5秒后,显示JOG-—逐渐增加直到显示rEAdy为止;4、再按住向左键约5秒后,右边的小数点逐渐向左边移动,直到显示SrV_on为止;5、此时按住上、下键即可进行电机正反转。
伺服放大器使用说明书
指 输 入 操作规格
按照 pointtable 编号指定来定位(31 点)
令 point 方 table
输入位置指 令
用 pointtable 来设定,1 点的移动长度设定范围:±1[μm]~ ±999.999[mm]
式 编号 输 入 速 度 指 用 pointtable 来设定,加速/减速时间用 pointtable 来设定,
令
S 字加减速时间常数用参数 No.14 来设定
系统
带符号的绝对值指令方式、增加值指令方式、带符号的绝对值指令、增加值指令指定方式
操作规格
利用 RS-422(232C)通信数据来定位
输 入 输 入 位 置 指 利用 RS-422(232C)通信来设定
位置 令
1 点的移动长度设定范围:±1[μm]~ ±999.999[mm]
伺服放大器使用说明书 -MR-J2S-CP-
三菱通用 AC 伺服
系列
内置定位功能 型号
伺服放大器技术资料集
1、功能和构造 1.2、伺服放大器标准规格
三菱电机株式会社 H
伺服放大器 MR-J2S-□ 10C 20C 40C 60C 70C 100 200 350 500 700 10C 20C 40C
转 运 转 table
按照位置、速度指令,来执行 1 次定位动作
方 方式 式
自 动 连 续 运 速度变更运转(2 速~31 速)、自动连续定位运转(2~31 点) 转
手 动 JOG
按照以参数设定的速度指令,用接点输入或 RS-422(232C)通信来执行点动动作
运 转 手 动 脉 冲 发 通过手动脉冲发生器来进行手动移动
点)
挡 块 式 后 端 以近点挡块后端为基准,进行原点复位
松下电器-AC伺服执行元件SHA系列-快速启动指南说明书
ISO14001 ISO9001Panasonic 株式会社制造Realtime Express (RTEX)快速启动指南本指南简单总结了AC 执行元件SHA-P 系列(以下:执行元件)与Panasonic 株式会社制造AC 伺服驱动器MINAS A5Ⅱ/A5ⅡN 系列(以下:驱动器)的连接及初始设定。
上一级控制器与驱动器的连接,或驱动器的操作,请参照Panasonic 株式会社制造MINAS A5Ⅱ/A5ⅡN 系列的使用说明书。
AC 伺服执行元件SHA 系列Panasonic 株式会社制造系列+2准 备1准备必要的设备。
连 接2连接设备。
初始设定3进行与执行元件组合时的驱动器的初始设定。
4页页6页10引 进 的 流 程3准 备准备必要的设备准备以下设备。
选购配件本公司销售产品Panasonic 株式会社销售产品电机用中继电缆线EWD-MB **-A06-TN-P 绝对位置编码器用 中继电缆线增量式编码器用 中继电缆线连接器套件*为电缆线长度。
(03=3m 、05=5m 、10=10m 、20=20m )● 编码器中继电缆线备有绝对位置编码器用(带电池盒)和增量式编码器用(无电池盒)。
驱动器的Pr0.15:可根据绝对位置编码器设定任意指定一个。
详情请咨询松下电器机电(中国)有限公司。
● 电机用和编码器用的中继电缆线长度,请从3m 、5m 、10m 、20m 中指定。
● 备有驱动器安装支援软件(PANATERM )。
连接PANATERM 与驱动器时,需使用USB 电缆线。
详情请咨询松下电器机电(中国)有限公司。
● 连接器套件的详情,请咨询松下电器机电(中国)有限公司。
执行元件● 请根据用途准备。
● 型号可从5个型号中 选择。
SHA25PSHA32PSHA40PSHA58PSHA65P● 请根据使用的执行元件,准备适合的产品。
● 组合。
执行元件型号組组合驱动器型号A5Ⅱ系列※1A5ⅡN 系列※2、3SHA25PMCDKT3520*MCDHT3520*SHA32P MDDKT3530*MDDHT3530*SHA40P MDDKT5540*MDDHT5540*SHA58P MFDKTA390*MFDHTA390*SHA65PMFDKTB3A2*MFDHTB3A2*※1:M *DKT **** :支持速度 · 位置 · 转矩 · 全闭环控制、支持安全规格。
伺服放大器使用说明书

伺服放大器使用说明书一、概述伺服放大器是自动控制系统中的一个重要组成单元,和电动执行机构配套,组成比例式电动控制机构,可广泛用于电力、冶金、化工、轻工等工业部门的自动控制系统中。
它可与DDZ-S系列电动执行机构配套,也可作为一个通用单元,应用在其它类型的电动执行机构上。
与其它类型的伺服放大器比较,有如下特点:1.电路采用智能控制系统对输入电流与反馈电流进行采样、比较,依据它们的差值大小对电机进行正反转控制。
2.系统对死区和精度进行自动调节,使控制品质最优。
3.也可手动调节死区大小以适应现场实际要求。
4.具有输入信号断路或小于一定值、位置反馈信号断路或小于一定值、反馈信号不跟随或反向变化大于一定值或固态继电器输出短路时,系统自动保护防止执行机构动作错误的功能以及开路报警、断电抱闸等功能。
二、主要技术指标1.输入信号:4~20mA2.阀位反馈输入信号:4~20mA3.输入通道:2个4.输入阻抗:250Ω5.输出功率:220VAC5A6.最大误差:2.5%7.报警输出:无源接点1常开1常闭8.工作电压:220VAC50Hz9.工作条件:环境温度0~50℃相对湿度〈85%三、接线端子图2-b9 电流输入+2-a9 电流输入-2-b11 阀位反馈输入+2-a11 阀位反馈输入-2-b3 故障状态信号输出端常闭点2-b4 常开点2-b5 公共点1-b13 接大地1-a8 火线1-a7.10 零线1-a5 接电机正转线圈1-b3 接电机反转线圈1-b8 接抱闸线圈注意: 电机接线要分清正反,正转时阀门开大,反转时阀门关小,并且阀门开度要与位返电流变化方向一致。
四、仪表的调试仪表功能性测试用两路信号源作输入信号,三个220V灯泡作负载, 2-b9 2-a9 输入一路4~20mA信号2-b11 2-a11 输入另一路4~20mA信号1-a5 1-a7 接一灯泡定义为D11-b3 1-a7 接一灯泡定义为D21-b8 1-a7 接一灯泡定义为D3正确接线后通电1、当输入电流IN大于反馈电流WF时D1灯亮2、当输入电流IN等于反馈电流WF时灯不亮3、当输入电流IN小于反馈电流WF时D2灯亮4、当输入电流IN或反馈电流WF的值小于3.5mA或断路时面板上黄灯亮,同时系统切断总电源并且送出抱闸信号(D3灭)和报警信号(常闭接点断开)。
松下-E2C型小型头接近开关(放大器分离型)-说明书
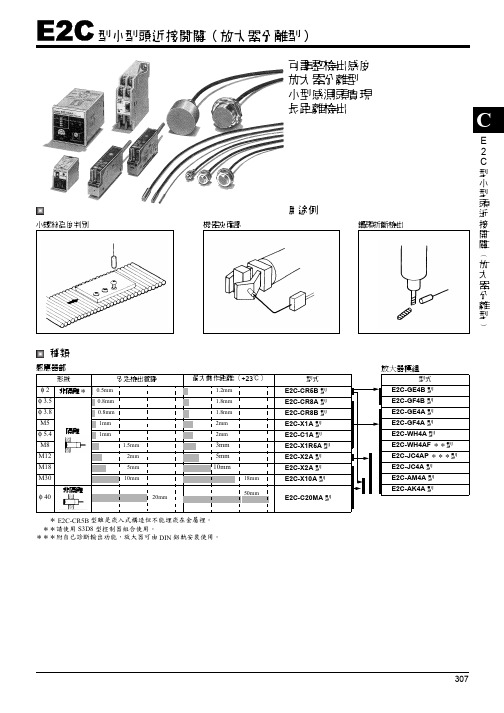
307E 2C 型小型頭近接開關︵放大器分離型︶C可調整檢出感度放大器分離型小型感測頭實現長距離檢出用途例小螺絲高度判別 機器夾確認 鑽頭折斷檢出種類感應器部* E2C-CR5B 型雖是崁入式構造但不能埋崁在金屬裡。
**請使用S3D8型控制器組合使用。
***附自己診斷輸出功能,放大器可由DIN 鋁軌安裝使用。
形狀安定檢出範圍最大動作距離(+23℃)型式φ 2非隔離* 0.5mm1.2mm E2C-CR5B 型φ 3.5隔離0.8mm1.8mm E2C-CR8A 型φ 3.8 0.8mm1.8mm E2C-CR8B 型M5 1mm 2mm E2C-X1A 型φ 5.4 1mm2mm E2C-C1A 型M8 1.5mm3mm E2C-X1R5A 型M12 2mm5mmE2C-X2A 型M18 5mm 10mmE2C-X2A 型M30 10mm18mm E2C-X10A 型φ 40非隔離20mm50mmE2C-C20MA 型放大器模組型式E2C-GE4B 型E2C-GF4B 型E2C-GE4A 型E2C-GF4A 型E2C-WH4A 型E2C-WH4AF **型E2C-JC4AP ***型E2C-JC4A 型E2C-AM4A 型E2C-AK4A 型E2C 型小型頭近接開關(放大器分離型)E2C308E 2C額定/性能感應器部*使用放大器模組無接點控制輸出時之最低值,測定條件是使用標準檢出物,檢出物體的間隔是標準檢出物體的2倍,設定距離是最大檢出距離 的1/2。
**放大器與感測頭組合時,纜線長度請參照下表。
高周波同軸纜線阻抗特是50Ω。
<感測頭與放大器組合使用時纜線長度一覽表>註:標準纜線長度3m 是標準品,5m 、10m 接受定製生產。
*放大器之纜線長切換操作,請參考放大器模組織操作。
形式項目E2C-CR5B 型E2C-CR8A 型E2C-CR8B 型E2C-X1A 型E2C-C1A 型E2C-X1R5A型E2C-X2A 型E2C-X5A 型E2C-X10A 型E2C-C20MA型檢出物體磁性金屬(非磁性金屬特性請參照特性圖)標準檢出物體鐵5×5×1mm 鐵5×5×1mm 鐵5×5×1mm 鐵8×8×1mm 鐵12×12×1mm 鐵18×18×1mm 鐵30×30×1mm 鐵50×50×1mm 安定檢出範圍(額定的全溫度範圍)0~0.5mm 0~0.8mm 0~1mm 0~1.5mm 0~2mm 0~5mm 0~10mm 0~20mm 安全檢出圍(0~+40℃)0~0.7mm 0~1.2mm 0~1.5mm 0~2mm 0~2.5mm 0~7mm 0~15mm 0~28mm 最大動作距離(+23℃一定) 1.2mm1.8mm 2mm3mm5mm10mm 18mm 50mm 應答周波數*1kHz800Hz350Hz100Hz50Hz使用周圍溫度-10~±55℃-25℃~+70℃(但不能結冰)使用周圍濕度35~95%RH溫度的影響-10~±55℃溫度範圍+23℃時檢出距離±25%以下-25±~+70℃的溫度範圍,在+23℃的檢出距離±15%以下振動耐久:10~55Hz 複振幅1.5mm X 、Y 各方向 2h衝擊耐久:500m/s 2(50G) X 、Y 各方向3次保護構造IEC 規格IP64[JEM 規格IP64(防沬形)]IEC 規格IP67 [JEM 規格IP67g (耐浸形、耐油形)]連接纜線長度**被覆纜線3mm高週波同軸纜線遠(標準長),最大 5m高週波同軸纜線3M (標準長),最大10m 重量(3m cable)約10g約40g約45g約50g約60g約140g約270g約300g材質外殼不銹鋼黃銅檢出面ABS 樹脂纜線聚乙烯檢出頭放大器E2C-CR5B 型E2C-CR8A 型E2C-CR8B 型E2C-X1A 型E2C-C1A 型E2C-X1R5A 型E2C-X2A 型E2C-X5A 型E2C-X10A 型E2C-C20MA 型E2C-GE4B 型3m 限定—————————E2C-GF4B 型—————————E2C-GE4A 型—3m 限定————E2C-GF4A 型—————E2C-WH4A 型—3m 或5m 纜線長度切換開關依各設位置*————E2C-WH4AF 型—————E2C-JC4AP 型—1~3m :纜線長切換端子短路*3~5m :纜線長切換端子開放*———E2C-JC4A 型—3m 限定———E2C-AM4A 型3m 或5m 限定(開關全部在左邊)0~5m 纜線長度切換開關依各設位置0~10m 纜線長度切換開關依各設位置*E2C-AK4A 型E2C309E 2C放大器部*1. 可以使用 DC24V ±10%(平均值)之全波整流電源。
松下伺服A5面板操作

A5面板操作
精心整理
精心整理
精心整理
精心整理
精心整理
精心整理
二、监视器的观测
1
S
2
S,
按4次上键显示d05.nPS(反
精心整理
馈脉冲总和),再按一次设置键S进入监控值状态;
3
4
S,
按13次上键显示d15. oL(过
精心整理
载率),再按一次设置键S进入
监控值状态;
5
PN
S
精心整理
2
值;
精心整理
3、把对应参数的设定值修改后,再按住设置键S约2秒后,
精心整理
精心整理
键M进入参数EEPROM写入模式
精心整理
EE_SEt ;
2、按一次设置键S进入EEP -
3显
精心整理
精心整理
1、驱动器上电后按一次设置键
精心整理
S进入d01.SPd;
2、按3次模式键M进入辅助模
4右
边的小数点逐渐向左边移
精心整理
动,直到显示SrV_on为止;
5、此时按住上、下键即可进行
精心整理
1、驱动器上电后按一次设置键
精心整理
S进入d01.SPd;
2、按3次模式键M进入辅助模
3
精心整理
精心整理。
伺服放大器的工作原理说明
伺服放大器的工作原理说明伺服放大器是控制伺服电机转动的关键部件之一,它可以放大控制信号,从而驱动伺服电机精准转动。
本文将介绍伺服放大器的工作原理。
伺服控制系统简介在了解伺服放大器的工作原理之前,首先需要了解伺服控制系统。
伺服控制系统由三部分组成:控制器、伺服电机和反馈装置。
控制器负责生成控制信号,伺服电机根据控制信号精准运动,反馈装置则对伺服电机的转动状态进行监测和反馈。
这三部分紧密结合,共同完成伺服电机的转动控制。
伺服放大器的功能伺服放大器在伺服控制系统中起到了非常重要的作用。
它负责放大控制信号,将其转换成足够大的电流或电压,驱动伺服电机实现精准运动。
此外,伺服放大器还要实现反馈信号的比较和误差放大,以实现闭环控制。
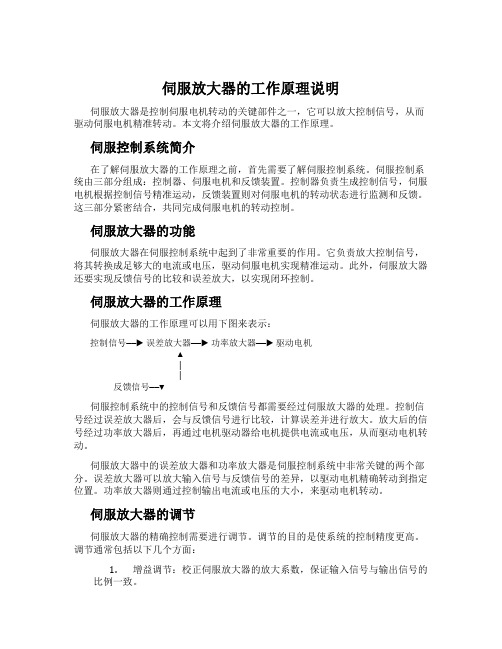
伺服放大器的工作原理伺服放大器的工作原理可以用下图来表示:控制信号——▶误差放大器——▶功率放大器——▶驱动电机▲││反馈信号——▼伺服控制系统中的控制信号和反馈信号都需要经过伺服放大器的处理。
控制信号经过误差放大器后,会与反馈信号进行比较,计算误差并进行放大。
放大后的信号经过功率放大器后,再通过电机驱动器给电机提供电流或电压,从而驱动电机转动。
伺服放大器中的误差放大器和功率放大器是伺服控制系统中非常关键的两个部分。
误差放大器可以放大输入信号与反馈信号的差异,以驱动电机精确转动到指定位置。
功率放大器则通过控制输出电流或电压的大小,来驱动电机转动。
伺服放大器的调节伺服放大器的精确控制需要进行调节。
调节的目的是使系统的控制精度更高。
调节通常包括以下几个方面:1.增益调节:校正伺服放大器的放大系数,保证输入信号与输出信号的比例一致。
2.偏移调节:校正伺服系统在没有输入信号时的误差,保证伺服电机不会在无控制信号的情况下产生不必要的转动。
3.相位调节:调整输入信号与反馈信号之间的相位差,使控制回路更加稳定。
总结伺服放大器是伺服控制系统中至关重要的一部分。
它负责放大控制信号、驱动伺服电机和进行反馈信号比较,实现闭环控制。
松下A5系列伺服位置控制使用方法

松下A5系列伺服位置控制使用方法一、位置控制参数二、参数设置模式(Prr000):上电显示“ro”按S键——按M键按到参数设置模式(Pr r 000)-----按上下键或<键(可移动小数点)到要设定的参数——按S键进入、修改(按上升键或下降键)——按S键保持3秒——按一下M键>写入模式(EE_SEb)>再按”S”键>执行显示(EEP -)按上升键保持5秒----EEP --、EEP ---、EEP ----、--------SbRrb---Finish,结束。
三、辅助功能模式(AF_RcL):按上升或者下降键选择项目1、自动补偿调整(AF_oF1、oF2、oF3)AF_RcL>下降键>AF_oF1>S键>oF1 --持续按上升键执行。
2、试运行(JOG)持续按上升键(CW)--rERdy------<键---SrU_on---持续上升键(CCW)3、参数初始化(AF_ini)---按“S”键----ini----持续按上升键5秒-------Finish----------结束4、前面板锁定解除(AF_unL)---按“S”键---unL--持续按上升键5秒----SbRrb----unL------、------------Finish 结束。
以上字母只是近似面板上显示的简码。
四、常见报警及其原因1、“11”---控制电源电压不足电源电压低或者驱动器故障2、“16”过载负载过重或电机电源线相序错误3、“21”编码器通讯异常编码器断线或者虚焊、漏焊、脱焊4、“24”位置偏差过大电机未按指令动作加大的值或者设为0五、接线1、主电源及编码器接线:2、大功率伺服编码器接线:3、控制端子接线:。
松下伺服驱动器说明书

PanasonicMinas A4系列AC伺服驱动器说明书Minas A4系列驱动器技术资料选编i目录1.规格型号说明 1 1-1.伺服驱动器型号说明 1 1-2.驱动器与电机的组合 2 1-3.驱动器与电机的尺寸 3 1-4.技术规格 52.外形与接插件9 2-1.接插件外形与清单9 2-2.电源插头X1、X2和编码器插头X611 2-3.控制信号接口X512 2-3-1.位置控制模式控制信号接线图12 2-3-2.速度控制模式控制信号接线图13 2-3-3.控制信号接线详解143.接线图26 3-1.电缆规格与最大长度26 3-2.I/O控制信号插头,编码器插头和外部反馈装置插头26 3-3.接线指示26 3-3-1.连接到电源接线端子的电缆26 3-3-2.连接到控制信号接口X529 3-3-3.连接到编码器信号接口X6344.参数36 4-1.参数概略36 4-2.参数详解39 4-3.电子齿轮功能565.时序图57 6.保护功能60 7.操作说明658.增益调整72 8-1.调整方法与框图72 8-2.实时自动增益调整73 8-3.常规自动增益调整76 8-4.适配增益调整78 8-5.自动调整功能的禁止80 8-6.增益自动设置功能81 8-6.手动调整增益829.控制框图93-cawin—abridged—jul04-Minas A4系列驱动器技术资料选编-1 -1.型号规格说明1-1.伺服驱动器型号说明1-1-1.预期使用期限在如下运行条件下,伺服驱动器预期可以使用28,000小时。
输入电源单相100VAC,50/60Hz;三相200VAC,50/60Hz环境温度 55℃输出转矩按额定转矩输出运行条件电机转速按额定转速输出伺服驱动器的可用期限与其运行工况密切相关。
1-1-2.驱动器型号说明Minas A4系列驱动器技术资料选编 -2 -1-2.驱动器与电机的组合伺服驱动器适配电机 型号 类型输入电源 型号 电压额定功率额定转速编码器规格 MSMD5AZP1*5线制,2500p/r MADDT1105 A 型 单相100V MSMD5AZS1*50W7线制,17位 MSMD011P1*5线制,2500p/r MADDT1107A 型单相100VMSMD011S1*100V100W 7线制,17位 MSMD5AZP1*5线制,2500p/r MSMD5AZS1*50W 7线制,17位 MSMD012P1*5线制,2500p/r MADDT1205A 型单相200VMSMD012S1*100W7线制,17位 MSMD022P1*5线制,2500p/r MSMD022S1*200W3000rpm7线制,17位MAMA012P1*5线制,2500p/rMADDT1207A 型单相200VMAMA012S1*200V100W 5000rpm7线制,17位 MSMD021P1*5线制,2500p/r MBDDT2110B 型单相100VMSMD021S1*100V 200W7线制,17位 MSMD042P1*5线制,2500p/r MSMD042S1*400W3000rpm7线制,17位MAMA022P1*5线制,2500p/rMBDDT2210B 型单相200VMAMA022S1*200V 200W 5000rpm7线制,17位 MSMD041P1*5线制,2500p/r MCDDT3120C 型单相100VMSMD041S1*100V 400W7线制,17位 MSMD082P1*5线制,2500p/r MSMD082S1*750W3000rpm7线制,17位MAMD042P1*5线制,2500p/rMCDDT3520C 型单相/三相 200VMAMD042S1*200V 400W 5000rpm7线制,17位Minas A4系列驱动器技术资料选编-3 -1-3.驱动器与电机的安装尺寸1-3-1.驱动器的安装尺寸A型驱动器B型驱动器Minas A4系列驱动器技术资料选编-4 -C型驱动器1-3-2.电机的安装尺寸请参考电机样本,此从略。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
松下A5系列伺服驱动器使用说明
伺服驱动器面板操作:
1.参数设置(如下图所示)
①按“SET”键
②按“MODE”键选择到“Pr 00”,按“▲”或“▼”选择项目。
③按“SET”键,按“▲”或“▼”调整参数。
④调整后,长按“SET”键返回。
2.参数保存,数据设好,按“SET”确认。
①按“MODE”键选择到“EE-SET”后
②按“SET”键确认,出现“EEP-”,
③按“▲”键3S后,出现“Finsh”/“reset”然后重新上电既保存。
(如图所示)
3.绝对编码器清零。
(如图所示)。
4、参数初始化(恢复出厂)
按下“MODE”键,再按“▲”或“▼”选择功能项目。
选择好功能后,按“SET”键开始执行该功能。
然后按下“▼”键持续3S。
依次出现“start”→“finish”表示执行完成。
5、报警解除操作。
(如图所示)
当出现报警且故障解除后,可通过以下操作解除报警。
附:详细内容请参照“松下伺服A5系列.pdf”。
Pr005=0 指令脉冲输入方式选择pr007=1 pr008=350(马达转一圈需要的脉冲数0)
Dp_spd电机转速。