EasyDriver步进电机驱动器
步进电机与驱动器原理是什么
步进电机与驱动器原理是什么
步进电机在现代的工业生产设备中使用程度大大提升,企业大量引进步进电机,步进电机驱动器是步进电机启动的主要动力,在步进电机中的作用是显而易见的。
步进电机可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
步进电机的新旧不是关键,一些从旧设备上拆下的步进电机对它进行适当的修改,然后安装上自己设计驱动器,他会像新的步进电机一样工作。
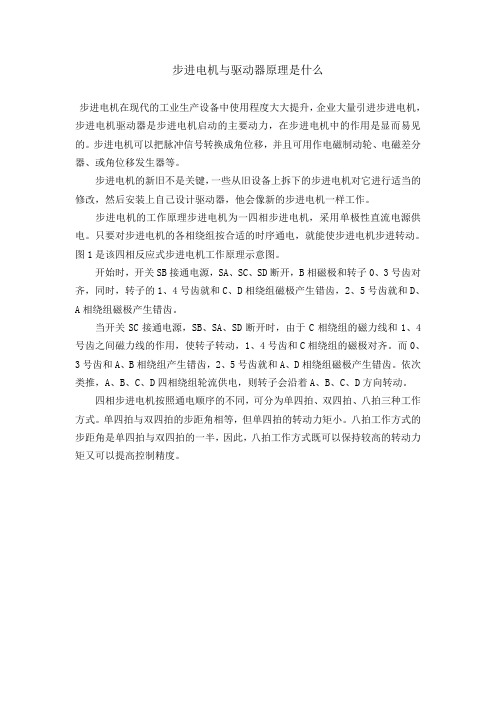
步进电机的工作原理步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
easydriver步进电机驱动器(v4.4官网翻译已完成)

EasyDriver步进电机驱动器(V4.4官网翻译,已完成)2015-03-10更新完成。
本帖的全部内容翻译自:/EasyDriver/ 截止日期为2014-04-07,具体更新请见官网。
转载请注明出处:极客工坊-/thread-9234-1-1.html By shenhaiyu 妙娃粽子一个基于开源硬件的步进电机驱动方案EasyDriverV1EasyDriver V2EasyDriver V3EasyDriverV4.2EasyDriver V4.3EasyDriver V4.4其中V4.2-V4.4在电路上没有区别,改变的仅仅是PCB及丝印内容。
目前网络上售卖的为V4.4,本帖主要介绍EasyDriver的最新版本。
项目简介:Bruce Shapiro找我来搞了个UBW项目(使用USB接口的驱动板),以解决他电脑上没有并行接口的问题。
UBW 的设计远超出我的期望。
除了达成最初的设计目标,它同样可以作为其它各种形式的固件的很好的平台。
但还是有个问题!Bruce过去在他的鸡蛋机器人课程上使用UCN5804B步进电机驱动板,因为它很容易配合实验电路板,并且简单易用。
不幸的是,它们现在要17美元一个,还很难找到。
Bruce希望我能设计制作一款同样能搭载在实验电路板上的替代品,仍然只需要两条输入线(步数和方向),能驱动两极步进电机。
于是就有了EasyDriver的设计。
快速指南:每个EasyDriver能够为两级步进电机提供大约每相750mA(两极一共1.5A)的驱动。
它默认设置为8步细分模式(所以如果你的电机是每圈200步,你使用EasyDriver 时默认为每圈1600步),更多细分模式可以通过将MS1或MS2两个接脚接地进行设置。
这是一种基于Allegro A3967驱动芯片的细分断路器。
对于此设计的完整规格,请查阅A3967的参数表。
它的最大每相电流从150mA到750mA。
可以采用的最大驱动电压大概是30V,其中包括板载5V的调压器,所以只需要一个电源。
Q2HB44MC二相混合式步进电机驱动器使用说明
Q2HB44MC二相混合式步进电机驱动器使用说明步进电机是一种电动转动执行器,它分为两种类型:双相步进电机和单相步进电机。
而二相混合式步进电机则是双相步进电机中的一种,其驱动方式相对单相步进电机更加灵活和精准。
本文将详细介绍Q2HB44MC二相混合式步进电机驱动器的使用说明,帮助用户更好地了解并正确使用该设备。
一、产品概述Q2HB44MC是一款广泛适用于各种自动化设备的二相混合式步进电机驱动器,其特点是采用矢量控制技术,具有高速、高精度、低噪音和低振动等优点。
该驱动器可广泛应用于数控机床、分度执行器、纺织机械、包装设备、自动化生产线等领域。
二、产品特点1.采用高性能的DSP控制器,实现高速、高精度的步进电机控制;2.具有自适应电流控制功能,可以根据电机负载情况自动调整输出电流;3.支持多种步进电机驱动方式,包括正反转、加减速控制、速度控制等;4.内置故障自检功能,可实时监测电机运行状态并及时报警;5.可通过外部信号控制电机的启动、停止、运行方向等功能。
三、产品参数1.电源电压:AC220V±10%2.输出电流范围:0.5A~4.5A3.步进角度:1.8°4.输出功率:100W5.控制方式:矢量控制6.工作温度:-10℃~+45℃7.保护等级:IP65四、使用步骤1.将Q2HB44MC二相混合式步进电机驱动器连接好电源和步进电机,并确保接线正确无误;2.设置相关参数,包括步进电机的相数、步距角、加减速时间、运行速度等;3.调试驱动器,通过外部信号控制电机的启停和运行方向,观察电机运行情况;4.如有需要,可通过调节电机的输出电流来调整电机的负载能力;5.如遇到故障或异常情况,及时查看故障代码并根据说明书进行相应处理。
五、使用注意事项1.在使用过程中,应避免电机超载运行,以免损坏设备;2.避免长时间在高温、高湿度环境下使用,以免影响电机寿命;3.定期检查设备的接线和连接状态,确保工作安全可靠;4.如使用过程中发现异常情况,应及时停机排查故障,防止事故发生;5.如需更换或维修设备,在断开电源的情况下进行操作,确保人身安全。
步进电机驱动器使用手册说明书

步进电机驱动器使用手册目录1安全事项 (2)2产品外形 (4)2.1产品外形 (4)3接口定义 (5)3.1电机、电源接口C N1 (5)3.1.1两相步进电机接线 (5)3.1.2五相步进电机接线 (6)3.2控制接口C N2 (7)3.2.1脉冲(P u l)信号/上限位信号 (9)3.2.2方向(D i r)信号/下限位信号 (9)3.2.3回零(Z e r o)信号/原点信号 (9)3.2.4脱机/使能(F r e e/E n a b l e)信号 (9)3.2.5到位(I N P)信号 (10)3.2.6就绪(R D Y)信号 (11)3.2.7接口电压 (11)3.3编码器接口C N3 (13)3.4U S B接口C N4 (14)3.5M o d b u s接口C N5 (15)4L E D指示 (16)4.1状态指示L E D (16)4.2通讯指示L E D (18)5性能参数 (18)5.1机械参数 (18)5.2安装尺寸 (19)6应用指南 (20)6.1安装准备 (20)6.2机械安装 (20)6.3电气安装 (21)6.4日常维护 (21)6.5注意事项 (21)6.5常见问题 (22)为保障使用者人身安全,保护设备正常使用,请务必阅读并遵守本章的安全事项。
在操作时违反本事项所示要求,可能会导致人员重伤或者死亡。
在操作时违反本事项所示要求,可能会引起驱动器永久损坏及附加事故。
谨防触电,爆炸或其他危险禁止在易爆、易燃或腐蚀性环境使用本产品;禁止开启产品外壳;驱动器带电时内部电压可能超过36VDC,驱动器和电机都必须接安全保护地线;驱动器内部电压不会瞬间释放,必须先切断电源,等指示灯熄灭后才能进行插拔、接线、设置、测量、搬动等人工操作;禁止带电插拔;驱动器故障时温度可能很高,必须先切断电源,等下降至安全温度后才能进行人工操作;驱动器应用于直接涉及人身安全的设备,必须配备人身安全防范措施;驱动器或设备故障时可能存在火灾隐患,必须配备消防安全防范措施。
步进驱动器的结构及工作原理图
步进驱动器的结构及工作原理图1、步进电机控制系统:大家看一下面这个图,如图1:左边PLC控制器它给我们的步进驱动器提供一个脉冲信号、脉冲的数量、脉冲的频率、方向信号,进入步进驱动器之后,它经过环形分配器和细分电路处理,再经过功率放大器把信号放大,我在给大家介绍PLC的时候就讲过,PLC它输出的脉冲信号是比较小的,它必须要经过步进驱动器放大脉冲信号之后才能驱动步进电机转动。
这个步进电机它是不能直接接直流电原来驱动它的,如24V、48V,这样是不行的,下面呢给大家看一下这个拆开的实物,如图2:内部电路板,左边是小功率的,右边呢是大功率的,也是智能化的,它带有CPU,因为它要带编码器执行闭环控制,接这个编码器的脉冲信号,我们再看一下它的外观,我之所以要这样给大家讲,是因为现在市面上好多的设备外观比较相似,容易混淆,所以我们必须要把它搞清楚,如图3:这就是它的外观了,第一个:步进伺服驱动器,这个步进伺服,就是说:它有反馈,步进电动机装有编码器,这个编码器它的A相、B相就反馈到我们的伺服驱动器了,这样就形成了闭环控制。
第二个呢是不带编码器反馈的。
2、步进驱动器的作用:我们说了步进电动机不能用直流电直接带动,必须由驱动器来带动它,步进驱动器接收到上位机的脉冲信号,由驱动器内部的环形分配器按一定的顺序去出发功能放大器的功率元件,来控制步进电机的绕组不断的通断直流电(就是A相线圈、B相线圈不断的通断电,也就是持续的交替通电),使我们的电动机转动。
下面我们再看一个图,如图4:这个图呢就是功率放大器的工作原理图,这个伺服步进驱动器它给出来这个T1就导通,T2导通用这个IGBT,现在用这个IGBT的比较多了,直流电源DC正极流向T1再通过那个A线圈,流向T2一直流向0V,这是给的直流电,它马上就产生磁场了,它就吸引这个转子转动一定的角度,那么给A线圈通完电后,我们下一步给B线圈通电,但是呢,有很多步进电机它是A线圈、B线圈同时通电,再有细分的情况下它给的电流呢,是不一样的,比如A线圈的电流是4各单位,B线圈的电流是0各单位,如果我们把A线圈的电流减去3各单位,那么B线圈的电流就变成了一个单位,这样呢就是它的细分,这样就是说我同时给它供电,用这个步进驱动器来控制这个电流的大小,来达到步进的目的,就是给A线圈通完电之后又给B线圈通电,完了有反向通电,如下图,图5:这就是反向通电,这个呢是在没有细分的情况下才这麽做的,我们再看下面这个图,如图6:它一旦有细分了,我给A线圈通电,通完电之后,也给B线圈通电,它们通电的比例不一样,那么我们就达到细分的目的了,这些呢都是伺服驱动器它本身来完成的,不用管它,但你要由细分开关设置它的细分,设置完了,究竟是A线圈先通电、还是B线圈先通电,通电的比例多大你就不用管它了,它会自动形成,那大家只需要关心给它的脉冲的频率和脉冲的个数多少,我们用PLC设置参数定位的时候要把这些参数设置了,后面的工作都是步进驱动器它自动完成的,但我们要知道它的这个原理。
microstepdriver说明书

microstepdriver说明书微步驱动器说明书一、产品介绍:微步驱动器(Microstep Driver)是一种用于控制步进电机运动的设备。
步进电机是一种将电脉冲信号转化为机械转动的电动机器。
微步驱动器能够控制电机旋转的步长,提供更加精确和平滑的运动。
二、产品特点:1.高精度控制:微步驱动器能够控制步进电机以极高的精度进行运动,提供更加精确的位置控制。
2.低噪音运行:微步驱动器的设计使其运行时产生的噪音非常低,不会干扰周围环境。
3.多种工作模式:微步驱动器支持全步进模式、半步进模式和多种微步进模式,以满足不同应用场景的需求。
4.过流保护功能:微步驱动器内置了过流保护功能,当电机工作时出现过流情况时会自动停止工作,避免损坏设备。
5.短路保护功能:微步驱动器还具有短路保护功能,当出现步进电机线路短路情况时会自动停止输出电流,保护电机和驱动器。
三、产品参数:1.输入电压:AC220V或DC24V2.输出电流:0-5A可调3.微调步数范围:1-2564.工作温度:-10℃-40℃5.存储温度:-20℃-70℃6.外观尺寸:120mm*75mm*100mm四、安装步骤:1.将微步驱动器安装在固定位置,确保设备处于稳定状态。
2.将输入电源接入微步驱动器的电源插座,接地线连接地线插座。
3.将步进电机的线缆连接到微步驱动器的输出插座上,确保连接无误。
4.根据实际需求调整微步驱动器的参数,如输出电流、微调步数等。
5.连接控制器和微步驱动器之间的通信线缆。
五、使用方法:1.确保所有接线正确连接后,通电。
2.使用控制器向微步驱动器发送指令,控制步进电机按照要求进行运动。
3.根据实际需求调整微步驱动器的参数,如运动速度、加减速度等。
4.在使用过程中,注意设备是否正常运行,如出现异常情况及时停止工作,并检查故障原因。
六、注意事项:1.在使用微步驱动器前,请仔细阅读本使用说明书,并按照说明书中的步骤进行操作。
2.在安装和调试过程中,请确保设备处于停电状态,以避免电击和设备损坏。
步进电机最简单的驱动方法
步进电机最简单的驱动方法步进电机是一种常见的电机类型,它可以根据输入的脉冲信号来精确控制旋转角度,适用于许多自动控制领域。
在步进电机的驱动方法中,最简单的方式是使用驱动器和控制器来实现基本的控制。
步进电机最简单的驱动方法通常采用的是开环控制系统。
开环控制是一种简单直接的控制方法,通过向步进电机施加固定的脉冲信号来驱动电机旋转。
在这种方法中,控制系统不会对电机的实际运动进行反馈检测,而是仅依赖于输入的脉冲信号来控制电机的步进运行。
为了实现步进电机的最简单驱动方法,需要准备以下几个关键元素:1.步进电机:作为被驱动的执行器,根据输入的信号进行步进运动。
2.驱动器:将控制器发送的信号转换为电机可以理解的脉冲信号,驱动电机正常工作。
3.控制器:负责生成适时的脉冲信号,控制电机的步进运动。
在步进电机的最简单驱动方法中,控制器生成的脉冲信号会传输给驱动器,驱动器再将信号传送给步进电机,从而让电机按照一定的步距顺序运转。
这种开环控制方法简单高效,适用于一些对运动精度要求不高的场景,比如简单的机械转动、小型设备控制等。
尽管步进电机的最简单驱动方法在某些应用中效果显著,但也存在一些局限性。
由于开环控制无法对电机实际运动状态进行监测和修正,容易出现误差累积导致不精确的情况。
因此,在一些对运动精度要求高的场景中,通常需要采用闭环控制系统,结合位置反馈传感器实现更精准的控制。
在实际应用中,可以根据需要选择合适的步进电机驱动方法。
若对精度要求不高,且对成本和复杂度有限制,最简单的开环控制方法可能是较为合适的选择。
而在一些对精度要求高、需求复杂的场景中,闭环控制系统通常能更好地满足要求。
综上所述,步进电机的最简单驱动方法采用开环控制系统,通过控制器生成的脉冲信号驱动电机旋转。
这种方法简单直接,适用于一些精度要求不高的场景。
在实际应用中,需要根据具体需求选择合适的驱动方法,以达到最佳控制效果。
1240i可编程步进电机驱动器产品说明书

Programmable Step Motor Driver
motors • drives • controls -2-
Table of Contents
Introduction --------------------------------------------------------------------- 4 Features -------------------------------------------------------------------------- 4 Block Diagram ------------------------------------------------------------------- 4 Getting Started ------------------------------------------------------------------ 5 Connecting the Power Supply --------------------------------------------------- 6 Choosing a Power Supply ------------------------------------------------------- 7 Connecting the Motor ----------------------------------------------------------- 8 Connecting to the PC ------------------------------------------------------------ 9 Jogging ------------------------------------------------------------------------- 10 Limit Switches ----------------------------------------------------------------- 10 Wiring a Mechanical Limit Switch --------------------------------------------- 11 Wiring a Limit Sensor ---------------------------------------------------------- 11 Wiring Inputs ------------------------------------------------------------------- 12 Wiring Outputs ----------------------------------------------------------------- 14 Microstepping ------------------------------------------------------------------ 15 Mounting the Drive ------------------------------------------------------------- 16 Mounting the Optional MMI --------------------------------------------------- 17 Recommended Motors ---------------------------------------------------------- 19 Mechanical Outline ------------------------------------------------------------- 20 Technical Specifications -------------------------------------------------------- 21 Mechanical Outline - Optional MMI ------------------------------------------- 22
EasySmc 2130 步进电机控制器 使用说明书
EasySmc 2130 步进电机控制器使用说明厦门华菱工控技术有限公司Xiamen Hualing Industry Control Technology Co.,Ltd一、概述 (1)二、性能指标 (1)三、运动控制系统组成框图 (1)3.1、PLC作为上位机,如松下的FP0-C10CR,带RS-232C串口 (1)3.2、工业控制计算机作为上位机,使用RS232 OR RS485与 EasySmc 2130 构成主从系统 (2)3.3、EasyHmi作为上位机,可最大限度的提高性能价格比,需要用户订制 (2)四、接线说明和跳线定义 (2)4.1、外形尺寸说明 (3)4.2、接线端说明 (3)4.2.1、电源输入信号 (3)4.2.2、串行口信号 (3)4.2.3、步进电机驱动信号 (3)4.2.4、下限输入,原点输入,上限输入,外部联锁输入信号 (4)4.2.5、紧急故障停止输入信号 (5)4.2.6、手动信号输入 (5)4.3、手动/联机跳线说明 (5)五、串行口控制命令说明 (5)5.1、初始化命令 (7)5.1.1、设置X轴加速度,起跳频率,最大速度(命令码1......7) (7)5.1.2、设置Y轴加速度,起跳频率,最大速度(命令码8......12). (8)5.1.3、设置Z轴加速度,起跳频率,最大速度(命令码13......15).. (9)5.1.4、设置各轴手动参数和反向复位距离S(命令码16+DAT1) (9)5.1.5、恢复默认的控制器参数,保存当前的控制器参数(命令码17+DAT1) (9)5.1.6、紧急制动、平滑制动命令(命令码18+DAT1) (9)5.1.7、控制命令(命令码19+DAT1) (10)5.2、轴位置参数设置命令 (11)5.2.1、设置X轴软件限位寄存器(命令码21+DAT1) (11)5.2.2、设置Y轴软件限位寄存器(命令码22+DAT1) (11)5.2.3、设置Z轴软件限位寄存器(命令码23+DAT1) (11)5.2.4、设置X轴当前位置寄存器(命令码24+DAT1) (11)5.2.5、设置Y轴当前位置寄存器(命令码25+DAT1) (11)5.2.6、设置Z轴当前位置寄存器(命令码26+DAT1) (12)5.3、轴状态和运动参数查询命令 (12)5.3.1、查询X轴状态(命令码31+DAT1) (12)5.3.2、查询Y轴状态(命令码32+DAT1) (12)5.3.3、查询Z轴状态(命令码33+DAT1) (12)5.3.4、查询X轴运动参数(命令码34+DAT1) (12)5.3.5、查询Y轴运动参数(命令码35+DAT1) (13)5.3.6、查询Z轴运动参数(命令码36+DAT1) (14)5.3.7、读出控制器当前手动、联机状态(命令码37+DAT1) (14)5.3.8、命令执行情况的查询(命令码38+DAT1) (15)5.4、复位运动命令和独立运动命令 (16)5.4.1、X轴复位运动(命令码41+DAT1) (16)5.4.2、Y轴复位运动(命令码42+DAT1) (17)5.4.3、Z轴复位运动(命令码43+DAT1) (17)5.4.4、X轴独立运动(命令码44+DAT1) (17)5.5、直线插补命令 (17)5.5.1、XY直线插补运动(命令码51+DAT1+DAT2) (17)5.5.2、XZ直线插补运动(命令码52+DAT1+DAT2) (18)5.5.3、YZ直线插补运动(命令码53+DAT1+DAT2) (18)5.5.4、XYZ直线插补运动(命令码57+DAT1+DAT2+DAT3) (18)5.6、圆弧插补命令 (18)5.6.1、XY圆弧插补运动(命令码61+DAT1+DAT2+DAT3) (18)5.6.2、XZ圆弧插补运动(命令码62+DAT1+DAT2+DAT3) (19)5.6.3、YZ圆弧插补运动(命令码63+DAT1+DAT2+DAT3) (19)5.7、样条插补命令 (19)5.7.1、命令格式 (19)5.7.2、样条同步输出功能 (21)5.8、其它 (21)5.8.1、计数器(2个) (21)5.8.2、程序下载、上载、脱机执行 (21)六、故障检查、维修保养、售后服务 (22)附录 (23)动控制系统。
EasyDrive两路步进电机驱动扩展板说明

两路步进电机驱动扩展板简介这是一款为Arduino量身定做的4线2相步进电机驱动,使用的是非常流利的easydriver方案,对于Arduino来说有很多详细的教材和范例代码,只要通过简单的IO口和PWM控制即可控制步进电机。
双步进电机驱动扩展板可通过Arduino同时驱动2个步进电机。
它可以使用4.75V~30V的电源工作。
Arduino可为数控铣床提供高精度控制。
它使用的步进电机驱动芯片与EasyDriver相同,所以你可以把它当作2个EasyDriver模块使用在板子上。
所有引脚引出为3PIN电子积木/传感器积木接口。
板子电路布局:1. 提供2路的步进电机驱动,方便一些两轴的CNC项目。
2. 操作电平还是兼容3.3v 和5V,通过拨通选择开关选择,方便兼容leaf maple,Chipkit等其他主控板3. 提供了多个电子积木接口,方便快速的接入各类电子积木模块,添加按钮,LED显示或者继电器开关的功能。
(不知道什么是ITEAD 的电子积木?你OUT了!让外接一个电路跟拼积木一样简单,只要一根线,一个电子积木模块,Plug and Play!ITEAD提供了多达29种各类电子积木,包括从LED,继电器,按钮到各类传感器,很方便的将你需要的各类功能添加到这个Arduino上)4. 驱动模式设置- 可通过跳线帽来设置驱动模式,具体参考datasheet部分5. 接线部分提供了接线端子和插针2种类型,方便在在不同情况下使用6. 驱动电流可以通过选择电位器调节,两路分开调节。
下面是驱动步进电机实验,根据实物图连接好电路,然后下载程序参考程序代码:int dirPin1 = 3;int stepperPin1 = 2;int dirPin2 = 7;int stepperPin2 = 6;void setup() {pinMode(dirPin1, OUTPUT); pinMode(stepperPin1, OUTPUT); pinMode(dirPin2, OUTPUT); pinMode(stepperPin2, OUTPUT); }void step(boolean dir,int steps){ digitalWrite(dirPin1,dir); digitalWrite(dirPin2,dir);delay(50);for(int i=0;i<steps;i++){digitalWrite(stepperPin1, HIGH);digitalWrite(stepperPin2, HIGH);delayMicroseconds(100);digitalWrite(stepperPin1, LOW);digitalWrite(stepperPin2, LOW);delayMicroseconds(100);}}void loop(){step(true,1600*5);delay(500);step(false,1600*5);delay(500);}。
MYCOM NanoDrive INS20系列步进电机驱动器用户手册说明书

2 phase stepping motor DriverNanoDriveINS20 series 【User’s manual】Please understand that we may make modifications to our products without notification in order to improve the capabilities and external appearance of our products.MYCOM, INC. (Head office)12, S. Shimobano, Saga hirosawa, Ukyo, Kyoto, Japan 616-8303TEL: 81-75-882-3601 FAX : 81-75-882-6531Home Page : http//www.mycom-japan.co.jp/NYDEN CORP.2610,North First St. #B San Jose, Ca, 95134, USATEL: 1-408-232-7700Home Page: http//MYCOM TECHNOLOGY, INC.2Fl., No.333, Fuhsing N, Road Taipei, Taiwan, R.O.C.TEL : 886-2-2719-0525MYCOM KOREA, INC.Rm.301, Keum Chang Bldg. #328-1, 6Ka, Dangsan-Dong Yeoung Dungpo-ku Seoul, KoreaTEL : 82-2-2635-6703MYCOM THCHNOLOGY (SINGAPORE) PTE. LTD.No.1, Sims Lane #05-05, One Sims Lane, Singapore 387355TEL : 65-6743-4476Home Page : http//.sgMalaysian Contact;No.1E-12-07, Jalan Batu Uban, Sunny Ville, Penang, MalaysiaTEL : 60-04-656-0328DANGERWARNINGCAUTIONDANGERSafety precautionsPlease read this operation manual thoroughly before starting any operation. This manual will guide the customers for proper use and avoid any mis-operation. This manual if properly read, will protect the users as well as other people from possibilities physical injuries, property damage and other serious accidents.Indicates a possibility of causing serious injury or worst, death to the user,caused by fire or electric shock if this warning is ignored. Also indicates that the equipment has the highest degree of causing damage.This shows the possibility that the user may get serious injury by fire orelectrical shock if this warning is neglected.This shows the possibility that may cause slight injury or damage to this product or other equipment.Do not operate this product if it is damaged or disassembled. Otherwise, it may cause fire orelectrical shock.In any case, do not attempt to repair or modify this product as it may cause fire, electricalshock or serious injuries.Do not use this product, in a place where the air includes a corrosive gas, inflammable gas, orany type of explosive gas, or the water or oil splashes, or it is near a flammable material. Otherwise, it may cause fire or electrical shock.Leave works such as installation, wiring, operation, checking and maintenance to experts whohave enough knowledge on this product. Operation without knowledge may cause electrical shock and other serious physical or property damages.Keep the power supply within the rated voltage range. Otherwise, it may cause fire or otherdamages.Make sure all the connections correctly done referring to the wiring diagram shown in thisuser’s manual. Otherwise, it may cause fire or other damages.Do not, in any circumstances, touch the terminal block while the power is on as there are someterminals which high voltage appeared. Otherwise, it may cause electrical shock.Do not touch or place objects such as metals or foreign substance on the board. Otherwise, itmay cause fire or electrical shock.Do not bend, pull or place the power or motor lines by the extreme force. Otherwise, it maycause fire or electrical shock.Do not make a mistake connecting the motor output terminals to protective earth or powersupply. Otherwise, it may cause fire.Do not do the driver’s installation preventing ventilation. Otherwise, it may cause fire.When the “HEAT” is activate, stop the pulse signal. Otherwise, it may cause fire. (Only theproduct have a Overheat function.)WARNINGDo not attempt any type of works such as moving the machine, wiring, maintenance, checking while the power is on. It is recommended that such works should be done only when more than ten seconds have elapsed after the power is off. Otherwise, it may cause electrical shock.Do not touch this product with wet hands while the power is on. Otherwise, it may cause electrical shock.Connect the protective earth terminal (PE) properly to it on your equipment, as illustrated in this user’s manual. Otherwise, it may cause electrical shock.Use this product which installed properly in the enclosure. Otherwise, it may cause electrical shock or injury.Do not leave the cover off from the terminal block while the power is on. Otherwise, it may cause electrical shock or injury.Fix this product securely onto your equipment. Otherwise, it may cause injury.Do not touch this product while it is running or right after it is stopped. Otherwise, it may cause injury, as its surface remains hot.Depending on the setting of this product, it may show an unexpected operation when recovering from overheating. Please read this user’s manual carefully and pay a special attention.Use a DC power supply with reinforced insulation for dangerous voltage. Otherwise, it may cause electrical shock.(Only DC input type)CAUTIONDo not use or store this product under a dusty environment. Otherwise, it may cause malfunction.Do not give a big shock to this product. Otherwise, it may cause malfunction.Do not use or store this product in a place of high or low temperature, or under an environment of extremely high or low humidity. Otherwise, it may cause short circuit to your device or further damage.Do not install this product in a place where a dew is generated. Otherwise, it may cause short circuit to your device or further damage.MYCOM is, in no way, responsible for any damages or malfunctions that are caused by user’s repair or modifications on this driver. If the user performed these initiations and the driver does not work satisfactorily, a warranty will not be provided.When giving up the use of the driver, dispose it according to an appropriate regulation on the industrial waste.Please do not remove the name plate.INDEX1. Specification of driver・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 INS20-010□/INS20-210□・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・12. Model number & Factory default・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 2-1. Model number of set・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 2-2. Driver model number・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 2-3. Factory default・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 3. Pulse waveform・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 3-1. Input pulse type・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 3-2. Pulse waveform・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・34. Each part name and functions・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 4-1. Each part name・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 4-2. Description of function・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-2-1. Power display LED (POWER)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-2-2. Excitation home display LED (MONI, Pin # CN, 7-9)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-2-3. Current off function (CO, Pin # CN, 5-6)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-2-4. Overheat display LED (HEAT, Pin # CN, 8-9)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-2-5. Overheat function・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・5 4-2-6. Motor change・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・6 4-2-7. Resolution select switch・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・7 4-2-8. Pulse input type select switch (1P/2P, SW 9th pole)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8 4-2-9. Auto current down function (A.CD, SW10th pole)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8 4-2-10. Current adjusting volume of current (C.ADJ)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8 4-2-11. Current adjusting volume of current down (CC.ADJ)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8 4-2-12. Motor connector (MOTOR).・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・9 4-2-13. Power supply connector terminal (AC)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・9 4-2-14. Signal I/O connector (CN)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・95. Example Of connection・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・96. Wiring and Install condition・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・10 6-1. Wiring for motor lines and power lines・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・10 6-2. Wiring of motor line・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・10 6-3. Wiring of signal line・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・10 6-4. Applicable solder-less terminal・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13 6-5. Tightening torque for terminal block.・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13 6-6. Install condition・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・137. Dimension・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・14 7-1. Dimension of INS20-010□/INS20-210□・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・14 7-2.An attachment size figure and an attachment metallic-ornaments・・・・・・・・・・・・・・・・・・・・・・・・・・・・15 size figure (option)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・158. Option・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・161. Specification of driverINS20-010□/INS20-210□Driver model # INS20-010□ INS20-210□Power sourceSingle phase 100-120V ±10% 50/60HzPower consumption150VA or less300VA or lessDriving type Uni-Polar constant current typeOutput current 0.8A/phase Max 2.0A/phase Max Resolution Basic step :1, 2, 2.5, 4,5, 8, 10, 20, 25, 40, 50, 100, 200, 250, 500, 1000 division Function Auto-current down, Input of output current off, Exciting timing output, Signal inputPhotocoupler input; Input resistance 390Ω Input signal voltage: L :0 - 0.5V, H : 4 - 5V1 pulse (PLUSE, CW/CCW),2 pulse (CW, CCW), COSignal outputPhotocoupler open-collector output, Limited capacity 25V 10mA or less, MONI, HEATNo abnormality detected after the application of the below voltage among each terminal for one second in normal temperature and humidity.・Power input : Motor leads collection terminal - PE terminal ・Power input : Motor leads collection terminal - Signal I/O terminal Dielectric Strength2.0kV(60Hz)Insulation Resistance100M Ω or more with applied DC500V megger in normal temperature and humidity. ・Power input : Motor leads collection terminal - chassis・Power input : Motor leads collection terminal - Signal I/O terminalOperating environmenttemperature0 to +40℃ No freezing Operating environmenthumidityLess than 80%, No condensation Storing environmenttemperature-10 to +60℃ No freezing Storing humidity Less than 80%, No condensation Operating height Less than 1,000m from sea levelAtmosphere In the room without corrosive gas, inflammable gas and dust. Without splashing water and oil. ApplicableStandard EN60950Weight 700g (600g Wichout cover) Accessories User’s manual (This book), ※Applicable motorPF243-A(B),PF244-A(B),PF245-A(B) PF264-A(B),PF266-A(B),PF268-A(B)2. Model number & Factory default2-1. Model number of setINS20-210□-268ASeries name Extension of setList of motor and driver combinationSeries name, INS20Driver model #Extension of set Motor model # CurrentA/phase243A(B) PF243-A(B) 0.9244A(B) PF244-A(B) 1.2245A(B) PF245-A(B) 1.2INS20-210□264A(B) PF264-A(B) 2.0266A(B) PF266-A(B) 2.0268A(B) PF268-A(B) 2.02-2. Driver model number2-3. Factory defaultDriver model number INS20-010□ INS20-210□Phase current 0.8 A/phase Max 2.0 A/phase MaxCurrent down value 0.4 A/phase 1.0 A/phaseAuto current down function Auto current down function, validInput type 2 pulse typeResolution 1/1(FULL)3. Pulse waveform3-1. Input pulse type2pulse type Timing chart1pulse type Timing chart3-2. Pulse waveformPlease input the pulse signal of the below shown waveform.M O T O RP u lse C W/C CWM O T O RC C WC W T 3:0.2µsec or s h or terT 1,T 2:0.2µsec or l o n gerM ot or star ts t o r otate by r is i n g e d ge o f w ave f or m .p ler.5V0V4. Each part name and functions4-1. Each part name①Power display LED (POWER)This lights on during power on. ②Excitation home display LED(MONI) This lights on when excitation home. ③Overheat display LED (HEAT)The light is switched on at the time of overheat. ④Switching○ Motor change: 1st-4th pole Adaptation motor data is changed.○ Resolution select switch: 5th-8th pole Resolution is changed.○ Switching of input pulse type (2P/1P) : 9th pole This switches the input pulse type○ Switching of Auto current downfunction(A.CD) : 10th poleThisturns on/off the auto current down function. ⑤Current adjust volume for current(C.ADJ) This adjusts the current when motor run. ⑥Current adjust volume for current down(CC.ADJ)This adjusts the current when current down. ⑦Motor connectorConnect in accordance with the color of motor Leads. ⑧Power connector Connect power.⑨Protective earth terminal(PE)Connect with the protective earth terminal of the machine. ⑩Signal I/O connector(CN) Various I/O signals are connected.⑦⑥①②③⑩⑨⑧⑤④C NINS20120V ~100-NLBB A AC O MA CHE ATM O N I P O WER C C.A D JC.A D J M O T O RAttention4-2. Description of function4-2-1. Power display LED (POWER)This lights on during power on.4-2-2. Excitation home display LED (MONI)This lights on when the output excitation pattern is excitation home.Then the signal is outputted to MONI terminal of CN. Please refer 5. Example of wiring.4-2-3. Current off function (CO)The signal between +COM and -CO of CN can control the excitation or non-excitation of motor. Please refer “5. Example of wiring ”.H level : excitation off (A photo-coupler is at the 'ON' time.) L level (or no connection): excitation on4-2-4. Overheat display LED (HEAT)This lights on when the temperature of internal heat-sink exceeds about 70℃.Then a signal is outputted to the HEAT output of CN. Please refer 5. Example of wiring.4-2-5. Overheat functionWhen a HEAT output is outputted, driver receives and operates the pulse which is being currently inputted. However, if a pulse input once goes out and there is no pulse input for 20msec(s), even if driver receves any pulses after that, it will not be operated. Excitation is maintained while driver is detecting HEAT signal (Motor does not become free.). Moreover, if temperature falls and HEAT is canceled after HEAT output, a pulse will be received and driver will operate.Sudden operation is expected for the return from HEAT.Be careful.20msec aboveHeat outputMotor run P luse input4-2-6. Motor changeAn adaptation motor is set up by a dip switch. (4-1.Each part name④ SW 1st-4th pole)adaptationmotorNo 1 PF243-A(-B) No 2 PF244-A(-B) No 3 PF245-A(-B) No 4 PF264-A(-B) No 5 PF266-A(-B) No 6 PF268-A(-B) No7 -No8 -No9 -No10 -No11 -No12 -No13 -No14 -No15 -No16 -2644-2-7. Resolution select switchResolution select switch.(4-1.Part name ④ SW 5th-8th pole) can set 16 various resolutions individually.Resolution No 1 1 / 1No 2 1 / 2 No 3 1 / 2.5 No 4 1 / 4 No 5 1 / 5 No 6 1 / 8 No 7 1 / 10 No 8 1 / 20 No 9 1 / 25 No 10 1 / 40 No 11 1 / 50 No 12 1 / 100 No 13 1 / 200 No 14 1 / 250 No 15 1 / 500 No 16 1 / 10001/1 to 1/200 resolution of INS20 series are equianglar resolution and 1/250 to 1/1000 resolution are follow-up control resolution・Equianglar resolution; The resolution which equally carries out an angle change per one pulse ・follow-up control resolution; The resolution which carries out an angle change per one pulse4201/1001/1000CAUTIONCAUTION4-2-8. Pulse input type select switch (1P/2P, SW 9th pole)2P/1P switch sets the driving pulse to 2 pulse type or 1 pulse type. (4-1 Each part name ④) Please refer “3. Pulse wave” about input type.4-2-9. Auto current down function (A.CD, SW10th pole)This reduces the motor driving current to 50%(default) of normal current to reduce temperature rising of motor after the motor stops and 200ms. later. OFF/A.CD switch (4-1, Each part name ④ SW10th pole) can release the function.・When automatic current down release is carried out, compulsive air cooling is required for a driver.・When automatic current down release is carried out, be careful of heat generation of a motor and a driver.4-2-10. Current adjusting volume of current (C.ADJ)Motor run current adjust (4-1. Each part name ⑤).4-2-11. Current adjusting volume of current down (CC.ADJ)During current down status the motor driving current is adjustable by the volume of CC.ADJ (4-1. Part name ⑥).INS20-010□ : Within about 40 to 80 percent of normal driving current INS20-210□ : Within about 30 to 80 percent of normal driving current・When making a current down current value 50% or more by INS200-210□, compulsive air cooling is required for a driver. ・Be careful of heat generation of a motor and a driver.2 pulse type 1 pulse typeA.CD Release A.CD EffectiveConnector pin assignment 1 CW+ 6 CO - 2CW -7 MONI3 CCW+ 8 HEAT 4CCW -9 COM 5 CO+4-2-12. Motor connector (MOTOR).This is connected according to the motor lead color.4-2-13. Power supply connector terminal (AC)This connects with single-phase 100V-120V 50/60Hz power supply. Use AWG18(0.75mm 2) or bigger wire.4-2-14. Signal I/O connector (CN)This is to be connected with driving pulse, current off signal, and various monitor signals.5. Example Of connectionPo w er Pro tec6. Wiring and Install condition6-1. Wiring for motor lines and power lines・When wiring, surely wire the protect earth line at first.・Install noise filter at power input where noise sources exist near the driver.・This driver has fuse inside, but use no-fuse-breaker or circuit protector of the capacity of below table for safety.6-2. Wiring of motor line・ Using shield wire can depress the radiant noise in case that the unnecessary radiation causes troubles.6-3. Wiring of signal lineIf the following procedure is not made, there may be a cause of incorrect operation. ・ Use bigger cable than AWG28 which suits with the connector. ・ Use twisted pair line or shield line.・ ① of twisted pair wiring diagram is recommended in case of twisted pair line but select and use asuitable diagram of ② to ④ depending on cable and environment. However do not wire as ○A to ○CDriver model Current capacity INS20-010 2A INS20-210 3ATwisted pair wiring diagram・ ① of shield line wiring diagram is recommended in case of shield line but select and use a suitable diagram of ② to ⑥depending on cable and environment. However do not wire as ○A to ○CShield line wiring diagramCAUTION6mm4.7mmφ3.2or moreorlessINS20NLBBAAC O MACMOTOR6-4. Applicable solder-less terminalUse insulated ring tongue terminal to connect with terminals.J.S.T V1.25-MS3NICHIFU TGV1.25-3Or a considerable article6-5. Tightening torque for terminal block.Tighten the terminal block with the torque of 4 to 7 kgfcm when connecting6-6. Install condition・Install the driver in control box. This unit is designed by the following condition.Over voltage category: Category II, Material group IIIPollution degree: Class 2Protection structure: IP20Protection against electric shock: Class I component・Fix driver on heat conductive metal plate tightly.・Put 3cm or more space between each driver and fix the drivers when multiple drivers are arranged. ・ Pay attention not to close the side slits of driver.・ Put this unit vertically because this unit radiatesby natural convection.※ see right fig.・Confirm that the driver environmental temperatureis less than 40℃when overheat LED lights.・When attached metal brackets are not used butinstalling by screws directly, use screws of “thethickness of installing part plus 3 to 5 mm”.・Because this unit uses high speed photocouplerfor the part of input pulse, use the shield line forsignal cable.・Please do not connect the signal line which is not used.It becomes the cause of incorrect operation.Use the driver in the condition that the heat sink temperature is under 60℃.7. Dimension7-1. Dimension of INS20-010□/INS20-210□Unit: mm. The screw head is not included.39.6C NINS20120V ~100-NLBB A AC O MA CHE ATM O N I P O WER C C.A D JC.A D J M O T O R11016M AX1427-2.Dimention for instllation and metal plate (option)Unit: mm. The screw head is not included.168160101611151631.58624.5168101611160198651516Th is ho le is not used.Th is ho le is not used.8. OptionIt is available to supply the following optional cables which have covering connector at the one side. ・CN: Pulse cableModel number :OPC-DS9P3 Connector : 9pin D-subCable : AWG28Multi-heart cable with a shield 3mPin # 1 2 3 4 5 6 7 8 9Insulator color White Red Yellow Violet Blue Line color None Black None Black None Black None Black None Black Because the cable of which insulator color is blue and line color is black is not used, please connect with the ground of the upper.Connect the unused cables with the ground of the upper. Otherwise it may become the cause of incorrect operation. Please refer 6-3 “Wiring of signal line” for the detail.・Motor CableModel number :OMC-CT203Cable : AWG20 Both-ends end 3mShield-less multi-heart cablePin Number 1 2 3 4 5Color Blue Red White Brown BlackHeat-Shr inkab le Tub ingFG3mこのページは取扱説明書に添付せず。
步进电机驱动器有哪些驱动模式

步进电机驱动器有哪些驱动模式步进电机驱动器有哪些驱动模式
步进电机驱动器主要是区别在于步进电机线圈电流的控制精度。
主要有三种驱动模式:
1.细分驱动模式
细分驱动模式有两大优点:低速振动极小和定位精度高。
对于需要低速运行或定位精度要求小于0.90度的步进电机,步进电机驱动器细分驱动模式获得了广泛使用。
工作原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。
2.整步驱动模式
在整步驱动模式运行当中,相同的步进电机既能配整步驱动器或半步驱动器也可以配细分驱动器,但是其所运行效果的不同。
步进电机驱动器按脉冲方向指令对两相步进电机的两个线圈循环激磁,这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.80度。
3.半步驱动模式
半步驱动模式和整步驱动模式比起来,半步方式更具有精度高一倍和低速运行时振动较小的优点,所以在实际当中使用整/半步驱
动器时一般都会选择半步模式。
在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如果给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。
如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.90度的半步方式转动。
ezdrive驱动电路工作原理
ezdrive驱动电路工作原理
EzDrive驱动电路是一款单路(芯片)驱动器,具有低成本、高性能和抗干扰能力的优势,可实现电机电路的调节和控制。
主要用于电动机控制系统和辅助系统,例如变速器、动力转换器、电动车辆和电动轮椅等。
EzDrive驱动电路由一个集成的模拟功率模块、一个控制模块和一个Motor DRV接口模块组成。
集成的模拟功率模块负责提供输入电压,将其变换为电机所需的输出电压,并为输出电机适当的功率提供支持。
此模块由滤波器、开关模块、变流器、电压调节器等元件组成。
开关模块用于将输入电压变换为正确的电压,滤波器可以消除外部干扰,变流器用于将电压变换为电机所需的正确电压,并且电压调节器可以根据电机的需求调节输出电压。
控制模块由一个8位微处理器(MCU)组成,负责接收输入给定的控制信号,例如方向、速度、力等信号,并将其转化为正确的驱动输出。
该模块还可以实现控制算法,以便实现电机的调速和力量控制。
步进电机驱动器发票分类编码
步进电机驱动器发票分类编码1. 引言步进电机驱动器是一种常用于控制步进电机运动的设备,广泛应用于各种自动化系统中。
为了便于管理和统计,对步进电机驱动器的发票进行分类编码是必要的。
本文将详细介绍步进电机驱动器发票分类编码的目的、原则、方法以及相关注意事项。
2. 目的步进电机驱动器发票分类编码的目的在于对不同类型的步进电机驱动器进行标识和分类,方便企业、机构和个人进行采购、销售、库存管理和财务核算等工作。
通过分类编码,可以实现对步进电机驱动器的统一管理和追溯,提高工作效率和准确性。
3. 原则步进电机驱动器发票分类编码应遵循以下原则:•统一性原则:分类编码应具有唯一性,每个步进电机驱动器都应有一个唯一的编码与之对应。
•层次性原则:分类编码应具有层次结构,包括大类、中类和小类等级别,便于细化分类和管理。
•可扩展性原则:分类编码应具有可扩展性,能够适应新型步进电机驱动器的不断出现。
•易识别性原则:分类编码应简洁明了,便于人们快速识别和理解。
4. 方法步进电机驱动器发票分类编码的方法可以采用自主编码或行业标准编码两种方式。
4.1 自主编码自主编码是指企业或机构根据自身需求和实际情况,制定适合自己的步进电机驱动器发票分类编码。
自主编码的优点是灵活性高,可以根据实际情况进行调整和改进。
但缺点是不具备通用性,不同企业或机构之间的编码可能不一致。
自主编码可以根据步进电机驱动器的特点和属性进行分类,如功率、电压、控制方式、通信接口等。
编码格式可以采用数字、字母、符号或其组合,便于识别和查询。
4.2 行业标准编码行业标准编码是指根据行业规范和标准制定的步进电机驱动器发票分类编码。
行业标准编码的优点是通用性强,不同企业或机构之间的编码一致,方便信息交流和共享。
但缺点是可能无法满足特定需求,需要进行额外的扩展和调整。
行业标准编码可以参考国家标准、行业标准或国际标准,选择适合自己的编码体系。
常用的行业标准编码包括国际物品编码(International Article Number, EAN)、国际商品编码(Universal Product Code, UPC)等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EasyDriver步进电机驱动器一个基于开源硬件的步进电机驱动方案EasyDriver V1EasyDriver V2EasyDriver V3EasyDriver V4.2EasyDriver V4.3EasyDriver V4.4其中V4.2-V4.4在电路上没有区别,改变的仅仅是PCB及丝印内容。
目前网络上售卖的为V4.4,本帖主要介绍EasyDriver的最新版本。
项目简介:Bruce Shapiro找我来搞了个UBW项目(使用USB接口的驱动板),以解决他电脑上没有并行接口的问题。
UBW的设计远超出我的期望。
除了达成最初的设计目标,它同样可以作为其它各种形式的固件的很好的平台。
但还是有个问题!Bruce过去在他的鸡蛋机器人课程上使用UCN5804B步进电机驱动板,因为它很容易配合实验电路板,并且简单易用。
不幸的是,它们现在要17美元一个,还很难找到。
Bruce希望我能设计制作一款同样能搭载在实验电路板上的替代品,仍然只需要两条输入线(步数和方向),能驱动两极步进电机。
于是就有了EasyDriver的设计。
快速指南:每个EasyDriver能够为两级步进电机提供大约每相750mA(两极一共1.5A)的驱动。
它默认设置为8步细分模式(所以如果你的电机是每圈200步,你使用EasyDriver时默认为每圈1600步),更多细分模式可以通过将MS1或MS2两个接脚接地进行设置。
这是一种基于Allegro A3967驱动芯片的细分断路器。
对于此设计的完整规格,请查阅A3967的参数表。
它的最大每相电流从150mA到750mA。
可以采用的最大驱动电压大概是30V,其中包括板载5V的调压器,所以只需要一个电源。
质优价廉,这玩意儿只要10美元,比你自己制作电路板更便宜(广告……)。
我并不出售EasyDriver。
这项设计和UBW一样是免费向公众发布的。
任何人可以参考本页所述的设计方案并随心所欲的改动。
我会提供原理图、电路板布局,还有原材料清单和如何制作和使用这一方案的说明。
如果你决定自己生产EasyDriver并出售,我诚恳的希望您能够通过E-mail通知我,这样我可以将您的店铺链接作为一个可以提供成品出售的供应商放在这个网站上。
(广告……)同时,一个比现在的EasyDriver更大、更强的驱动板已经设置完成了,名字叫做Big EasyDriver(BED)。
你可以在Schmalz Haus的网站阅读所有关于它的资料。
最新更新:(11/16/2012) 我使用SparkFun 的步进电机和EasyDriver 做了一些温度和电流的测试,结果在页面下部问与答的后面。
(10/13/2012) Xavier 使用Arduino 控制Easy Drivers,并写了一篇非常棒的教程。
(07/20/2012) MyDIYCNC目前在他们部分产品中开始使用Easy Drivers 了,并在他们的店铺中售卖驱动板。
(02/11/12) 全新的Easy Driver 和Big Easy Driver 示例- 使用Arduino 代码及图表等等。
(02/11/12) 一时兴起,我测试了一下能够让EasyDriver正常工作的最低电压。
目前来看可以低至4V(使用刚生产出来的V4.4版本),真的很酷!值得注意的是,你需要一个线圈电阻极低的步进电机才能让它工作得很好,除非你使用全步或半步驱动。
(01/03/12) 对EasyDriver v4.4 的原理图和BOM做了非常小的修改- C3 改为47uF(因为SparkFun 一直使用47uF 电容,我已经修改了文件强调这一点。
之前的电容容量为100uF)。
(08/19/11) 现在我们拥有了EasyDriver V4.4 的Eagle 元件库,献给那些想把EasyDrivers 集成到自己板子上的人们。
(08/03/11) 在生产EasyDriver v4.4 的时候,似乎使用了两种不同类型的可调电阻。
如果你的可调电阻是近似方形的白色款(请参考页面顶部的V4.4 图片),那么PCB上面印的最大/最小电流是反的。
之前的版本(见v4.3 的图) 接脚是在右侧,所以丝印的标志是正确的。
我不知道供货商为什么改变了他们的设计,他们总是这样。
无论如何请留意这个细节。
请注意,板子只有一种,而且只有一种可变电阻是反向的。
(10/21/09) 请注意v4.3 和v4.2 (其他型号很可能也是) 电流调节标志印反了。
在使用的时候一定要多加小心!这肯可能导致严重后果,比如你想将电流调小,但却输出了全部的750mA 电流到你的步进电机,高温可能会烧掉你的步进电机。
这一点在最新的v4.4 中将会被修正。
(12/02/09) V4.3 已经提交给SparkFun - 仅仅是增加了两个安装孔。
(10/01/09) 经过了一个漫长的过程(由于我的拖延和日程安排) 我们终于发布了新版本的EasyDriver!经过与SparkFun 的密切合作,我很高兴的向世界发布了4.2 版本。
新版本有很多激动人心的改进,并且价格不变!感谢Spark 将这一产品向全世界推广(这里的很多图片都来自于SparkFun)。
(09/17/08)D aniel Thompson已经写了一个绝妙的教程(包含视频),配合Arduino使用EasyDriver来驱动步进电机!谢谢Daniel!注意:很多人在电源、EasyDriver和Arduino未接地的情况下进行尝试。
这可能会失效!所以先确认下接地吧,这样更容易成功。
(5/23/07)增加了V3方案的文档。
(4/6/07)建立最初的网页,放出了EasyDriver的V1、V2、V3的设计修订。
EasyDriver硬件版本表版本原理图电路板布局图片接点说明Eagle文件和V1无无无无无V2无无无无无V3点击链接点击链接点击链接点击链接点击链接V4.2点击链接点击链接点击链接点击链接点击链接V4.3点击链接点击链接点击链接点击链接点击链接V4.4点击链接点击链接点击链接无点击链接版本说明:EasyDriver V1 - 这是第一次尝试,我在BatchPCB (强烈推荐)制作了两片。
它工作得很好,但是板子太小发热量太大,并且没有可调的电流限制和5V输出。
EasyDriver V2 - 这是第二次尝试,我在Futurlec制作了一些。
没有用焊接掩模或者丝网印刷。
这块板子比V1要大了一倍,散热好多了。
加上了5V的调压器,新增了可变的电流限制。
EasyDriver V3 - 对V2的优化设计,板载了可变电流限制,转为0603组件。
对于V2的设计还是挺有信心的。
EasyDriver V4.2 - 依然是对V3的优化设计,稍长的板子,但是增加了很多新特性。
以下是对V3 的改进:*芯片的每一个接脚都引出了焊点,并且增加了10k上拉(或下拉)电阻。
这意味着你可以使用芯片的所有控制功能了。
例如你可以改变MS1 和MS2 进行全步、半步、1/4步或者1/8步驱动。
你可以让芯片进入睡眠状态(大幅降低功耗)或者重置芯片。
当然,你也可以使用PFD 信号了。
*V3那个小的可怕的可调电阻现在变得大一些了,:-) 而且非常赞的是,它不再无限制的连续旋转,你能够知道最大最小电流调节的终点在哪里。
*增加了5V电源指示LED,可以了解5V供电是否正常。
*在STEP 和DIR 接脚的旁边增加了一个GND 接脚,可以使用三芯电缆连接到你的Arduino 或者其他单片机。
*通过短接SJ2,可以将供电从5V 切换为3.3V。
这样可以向使用3.3V 的Arduino 或者其他低压单片机供给 3.3V 电压。
*如果你想使用自己的开关电源向EasyDriver 供电,切断SJ1,同时提供3.3V 或者5V电压到JP4 的pin 1。
*如果你希望EasyDriver 能够向一些小电路供电,你可以使用JP4 的pin 1 向外输出5V (或3.3V) 电压。
到底能提供多大功率呢?摸摸电压调节器吧,如果烫手了,很不幸,你的小电路并不那么“小”。
至于温度还取决于你向EasyDriver 的供电电压。
*TP1 接脚允许你连接一个电压表到VREF 信号,当你调节电流的时候,可以测量输出到步进电机的电压,能够间接计算出流经电机的电流。
至于怎么计算,看看相关的原理吧,反正我是没计算过- 我只是凭感觉调节输出给电机的电流(电机不会过热就ok)。
*元件数据表中电容的容量是100uF,但是47uF 就已经足够了。
虽然越大越好- 但是Allegro 的数据认为47uF 最好,而且SparkFun 使用的就是47uF 电容,工作起来一切正常。
EasyDriver V4.3 - 和V4.2 比起来几乎是一模一样,除了在用户强烈要求下增加的两个安装孔。
EasyDriver V4.4 - 和V4.3 也几乎是一模一样的。
只是修正了电流调节的MIN/MAX 丝印错误(好吧,其实并没有完全修正,这取决于板子上焊接的可变电阻型号) 具体参见下面的Q9。
问与答:Q1) 我的电机写着只能工作在2.1V电压和2A电流下,EasyDriver(工作在30V的输入电压下)会不会烧掉或者是以其他方式致残我的电机呢?A1) 放心吧,不会的。
通常步进电机都指定了直流电通过线圈,而我们最需要关注的是流经线圈的电流。
如果使用EasyDrivers的话,电机的额定电压并不是很重要。
(关于这点,或许对所有的驱动板都适用。
)EasyDrivers会持续在线圈上提升电压,直到电流达到由电路板上端子设定的最大值,即750ma。
然后它又会降低线圈上的电压,使得电流再次下降,之后电压又上升,如此不停重复,大约每秒钟20000次左右循环。
无论电机的额定电压是多少,只要电机的每相额定电流为150ma(或者更高),那么配合EasyDrivers驱动的话效果最后都不错。
有一点需要注意的是,如果你的电机每相额定电流是小于750ma,那么你需要去调节EasyDrivers上的可调电阻,以此降低电流来达到符合你电机的最大相电流。
Q2) 我给EasyDrivers供电的电压应该是我电机的额定电压吗?(也就是说上面提到的2.1V)A2) 不是的。
真的。
电机的额定电压并不是很重要。
关于这一点我至少还是比较确定的,所以请一定相信我。
你完全可以根据你的实际情况尽可能得给EasyDriver提高供电电压。
低电压的好处是会产生较少的热量(在EasyDriver和电机上),但是会降低最大最速和电机扭矩。
而高电压(最大可达到30V)会让你的电机在高速情况下得到更大的扭矩,但是反过来EasyDriver和电机会发烫。
这取决于你。
当然,如果输入电压越高,那么由于某些原因使电机线损坏,从而导致EasyDriver损坏的几率越大。