无人驳的锚机遥控系统研制及应用
无线遥控技术及其在起重机上的应用

起重机无线遥控系统的功能
控制起重机的基本动作: 如升降、伸缩、旋转等。
安全保护功能:如超载保 护、幅度限制、角度限制 等。
ABCD
显示起重机的状态信息: 如负载重量、工作幅度、并提示故障信息, 方便维修人员快速定位和 解决问题。
03
无线遥控技术在起重机 应用中的挑战与解决方 案
随着物联网技术的发展,无线数传模块在工业自动化领域得到广泛 应用,可以实现远程数据采集和控制。
无线遥控技术的应用领域
工业自动化
无线遥控技术可以实现设备的远程控制和监测, 提高生产效率和安全性。
无人机
无线遥控技术是无人机的核心技术之一,可以实 现无人机的远程控制和自主飞行。
ABCD
智能家居
通过无线遥控技术,可以实现家庭设备的远程控 制和智能化管理,提高生活便利性。
特点
无线遥控技术具有远程控制、实时监 测、灵活性强、安全性高等优点,广 泛应用于工业自动化、智能家居、无 人机等领域。
无线遥控技术的发展历程
早期无线电遥控
20世纪初,无线电遥控技术开始出现,主要用于航模和军事领域。
红外线遥控
20世纪70年代,红外线遥控技术开始普及,广泛应用于家电、玩 具等领域。
无线数传模块
优化操作、提升作业能力
详细描述
某大型物流公司起重机的无线遥控系统升级后,优化了操作流程,提升了作业能力,满足了快速装卸货物的需求。
THANKS FOR WATCHING
感谢您的观看
04
无线遥控技术在起重机 应用的发展趋势
无线遥控技术的未来发展方向
技术创新
无线遥控技术将继续在信号传 输、稳定性、安全性等方面进 行技术创新,提高遥控操作的
准确性和可靠性。
基于人工智能的船舶自动化控制系统设计与实施

基于人工智能的船舶自动化控制系统设计与实施随着科技的进步和人工智能的不断发展,船舶自动化控制系统正在越来越广泛地应用于海洋工程、航运和渔业等领域。
通过将人工智能技术与船舶控制相结合,能够提高船舶的安全性、效率和可靠性。
本文将探讨基于人工智能的船舶自动化控制系统的设计与实施。
一、人工智能在船舶控制系统中的应用人工智能在船舶控制系统中的应用主要体现在以下几个方面:1. 智能导航与路径规划:利用人工智能算法,对海上交通情况进行分析和预测,并根据实时数据调整船舶的航线,从而提高航行的安全性和效率。
2. 自主节点控制:通过引入智能控制算法,使船舶能够自主地进行速度控制、转向和停车等操作,减少人为因素对船舶操控的依赖,提高操作的准确性和灵活性。
3. 动力系统优化:通过人工智能算法对船舶的动力系统进行优化分析和调整,实时监测船舶的能耗情况,进而提高船舶的能源利用效率和减少碳排放。
二、基于人工智能的船舶自动化控制系统设计基于人工智能的船舶自动化控制系统设计应包括以下几个方面:1. 数据采集与分析:通过传感器采集海洋环境、船舶状态和航行数据等信息,将这些数据进行存储和分析,为后续的人工智能算法提供数据支持。
2. 智能算法设计:根据船舶自动化控制的需求,设计和开发适用于船舶控制系统的智能算法,包括路径规划、动力系统优化和船舶自主控制等方面的算法。
3. 系统集成与优化:将智能算法与船舶自动化控制系统进行集成,并进行优化和测试。
确保系统的稳定性、可靠性和安全性。
三、基于人工智能的船舶自动化控制系统实施在实施基于人工智能的船舶自动化控制系统时,应注意以下几个方面:1. 人力支持和培训:在系统实施过程中,需要培训船员和相关人员,使其熟悉和理解新系统的操作和功能。
同时,也需要保留人工干预的选项,以备系统出现故障或异常情况时的应对措施。
2. 系统安全与防护:在设计船舶自动化控制系统时,应考虑数据的安全性和隐私保护,防止系统被黑客攻击或非法入侵。
煤矿智能化掘进远程控制系统建设与应用

煤矿智能化掘进远程控制系统建设与应用摘要:煤炭是我国的主要资源之一,综掘是提升巷道掘进效率、降低劳动强度以及缓解采掘接替紧张问题的主要途径之一,但是受掘进工艺制约,综掘工作面往往面临粉尘浓度高、噪音大等问题,作业人员长时间在这种恶劣环境中工作,会给身体健康带来一定威胁。
巷道掘进涉及煤岩开挖、煤矸运输、支护等多个环节,通过综掘、带式输送机及锚杆钻机等配合,各环节虽然基本实现了机械化操作,但是普遍面临自动化程度低、效率不高等问题。
关键词:掘进机;远程控制;智能化引言智能化煤矿掘进工作面人的不安全行为影响因素又包含若干二级影响因素,并对各个影响因素进行了问卷调查。
运用层次分析法分析了一级影响因素,得出个体因素影响程度最大,其次是环境因素。
运用熵权法研究了各个一级影响因素下的二级影响因素的影响权重。
因此,煤矿行业应该根据具体的发展状况,选择科学、合理的技术对综合机械化掘进系统进行智能化建设,使掘进设备具备更加完善的功能,进一步提升掘进效果,保障掘进工作的顺利开展。
1煤矿智能化开采的定义和应用价值煤矿智能化开采是对矿山资源、生产人员、材料设备、外部环境等进行数字化,实现煤矿生产过程中一切信息可以自动采集、实时传输、全程可视、标准运行、自动操作等,使得煤矿生产可以像智能机器一样实现自我识别并进行决策,实现生产系统高效运营,降低企业运营成本,提高生产效益。
这种将煤矿现有生产方式转化成高度网络集成化、数据智能化的生产方式越来越受到煤矿生产企业的重视,成为煤炭产业发展的趋势所在,煤矿智能化开采核心在于采用高新技术和装备,解决煤矿生产、经营问题。
煤矿智能化开采是高新技术与煤炭工业的深度融合,取代井下生产工人的各种作业行为,达到煤矿减人、高效生产的目的。
煤矿智能化开采是新一轮产业变革的产物,是经济社会发展的必然业态,代表了煤矿新的发展方向,开创了煤矿生产新的发展格局,推动了煤矿企业高质量发展。
煤矿智能化开采从根本上改变了煤矿传统的以人为主的生产方式,促进煤矿生产由劳动力密集型向人才技术密集型转变,促进煤矿企业效益提升,确保煤矿企业生产安全。
无人船艇研发与应用项目实施计划书

无人船艇研发与应用项目实施计划书第一章项目概述 (3)1.1 项目背景 (3)1.2 项目目标 (3)1.3 项目意义 (3)第二章技术研究 (3)2.1 无人船艇技术概述 (3)2.2 国内外研究现状 (4)2.2.1 国内研究现状 (4)2.2.2 国外研究现状 (4)2.3 技术发展趋势 (4)2.3.1 无人船艇技术的融合创新 (4)2.3.2 无人船艇技术的应用拓展 (4)2.3.3 无人船艇技术的标准化和规范化 (4)2.3.4 无人船艇技术的国际化合作 (4)第三章项目研发内容 (4)3.1 无人船艇总体设计 (5)3.2 关键技术研究 (5)3.3 系统集成与测试 (5)第四章软件开发 (6)4.1 软件需求分析 (6)4.2 软件设计 (6)4.3 软件实现与测试 (7)第五章硬件开发 (7)5.1 传感器选型与集成 (7)5.2 控制系统设计 (8)5.3 能源系统设计 (8)第六章项目实施计划 (9)6.1 项目进度安排 (9)6.1.1 项目启动阶段 (9)6.1.2 项目策划与设计阶段 (9)6.1.3 项目开发阶段 (9)6.1.4 项目实施与验收阶段 (9)6.1.5 项目后期维护与优化阶段 (9)6.2 项目预算 (9)6.2.1 项目预算总额 (9)6.2.2 预算分配 (9)6.2.3 预算控制 (10)6.3 项目风险管理 (10)6.3.1 风险识别 (10)6.3.2 风险预防与应对措施 (10)第七章测试与验证 (10)7.1 测试方案设计 (10)7.1.1 测试目标确定 (10)7.1.2 测试策略制定 (10)7.1.3 测试用例设计 (10)7.1.4 测试执行计划 (11)7.2 测试环境搭建 (11)7.2.1 硬件环境搭建 (11)7.2.2 软件环境搭建 (11)7.2.3 测试工具选用 (11)7.3 测试结果分析 (11)7.3.1 测试数据收集 (11)7.3.2 缺陷统计与分析 (11)7.3.3 功能指标分析 (11)7.3.4 测试覆盖率分析 (11)7.3.5 测试报告编写 (11)第八章项目成果与应用 (12)8.1 项目成果展示 (12)8.2 项目成果应用领域 (12)8.3 项目成果推广策略 (12)第九章人才培养与团队建设 (13)9.1 人才培养计划 (13)9.1.1 人才培养计划的目标 (13)9.1.2 人才培养计划的内容 (13)9.2 团队建设与管理 (13)9.2.1 团队建设的目标 (13)9.2.2 团队建设与管理的方法 (14)9.3 交流与合作 (14)9.3.1 内部交流与合作 (14)9.3.2 外部交流与合作 (14)第十章项目管理与保障 (14)10.1 项目管理机制 (14)10.2 项目质量保障 (15)10.3 项目进度监控 (15)第十一章项目成果评价与反馈 (16)11.1 项目成果评价体系 (16)11.2 项目成果评价方法 (16)11.3 项目成果反馈与改进 (16)第十二章项目总结与展望 (17)12.1 项目总结 (17)12.2 项目不足与改进 (17)12.3 项目展望与建议 (18)第一章项目概述1.1 项目背景社会经济的快速发展,我国各行各业都在不断变革与升级,项目管理和实施在各个领域的重要性日益凸显。
掘锚一体机遥控系统设计
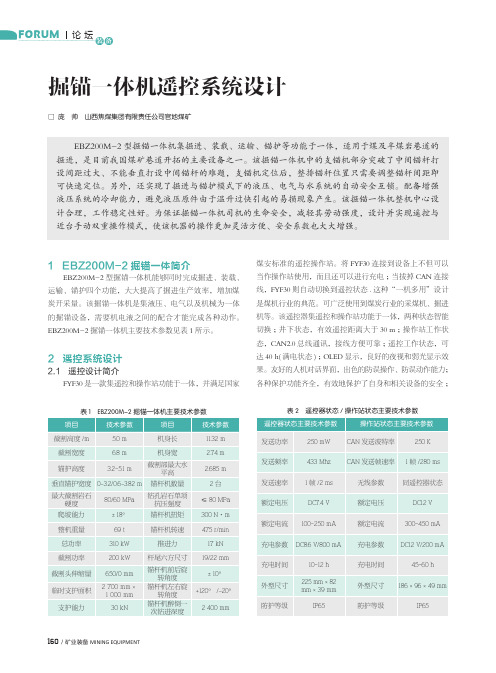
FORUM 论坛装备160 /矿业装备 MINING EQUIPMENT掘锚一体机遥控系统设计□ 庞 帅 山西焦煤集团有限责任公司官地煤矿1 EBZ200M-2掘锚一体简介EBZ200M-2型掘锚一体机能够同时完成掘进、装载、运输、锚护四个功能,大大提高了掘进生产效率,增加煤炭开采量。
该掘锚一体机是集液压、电气以及机械为一体的掘锚设备,需要机电液之间的配合才能完成各种动作。
EBZ200M-2掘锚一体机主要技术参数见表1所示。
2 遥控系统设计2.1 遥控设计简介FYF30是一款集遥控和操作站功能于一体,并满足国家EBZ200M-2型掘锚一体机集掘进、装载、运输、锚护等功能于一体,适用于煤及半煤岩巷道的掘进,是目前我国煤矿巷道开拓的主要设备之一。
该掘锚一体机中的支锚机部分突破了中间锚杆打设间距过大、不能垂直打设中间锚杆的难题,支锚机定位后,整排锚杆位置只需要调整锚杆间距即可快速定位。
另外,还实现了掘进与锚护模式下的液压、电气与水系统的自动安全互锁。
配备增强液压系统的冷却能力,避免液压原件由于温升过快引起的易损现象产生。
该掘锚一体机整机中心设计合理,工作稳定性好。
为保证掘锚一体机司机的生命安全,减轻其劳动强度,设计并实现遥控与近台手动双重操作模式,使该机器的操作更加灵活方便、安全系数也大大增强。
表1 EBZ200M-2掘锚一体机主要技术参数项目技术参数项目技术参数截割高度/m 5.0 m 机身长11.32 m 截割宽度 6.8 m 机身宽 2.74 m 锚护高度3.2~5.1 m截割部最大水平高 2.685 m 垂直锚护宽度0-3.2/0.6-3.82 m 锚杆机数量2台最大截割岩石硬度80/60 MPa 钻孔岩石单项抗压强度≤80 MPa 爬坡能力±18°锚杆机扭矩300 N·m 整机重量69 t 锚杆机转速475 r/min 总功率310 kW 推进力17 kN 截割功率200 kW 杆尾六方尺寸19/22 mm 截割头伸缩量650/0 mm 锚杆机前后旋转角度±10°临时支护面积 2 700 mm×1 000 mm 锚杆机左右旋转角度+120°/-20°支护能力30 kN锚杆机醉倒一次钻进深度2 400 mm煤安标准的遥控操作站。
基于人工智能的船舶自动控制系统设计与实现
基于人工智能的船舶自动控制系统设计与实现随着人工智能技术的不断发展,船舶自动控制系统也得到了很大的改进与发展。
基于人工智能的船舶自动控制系统设计与实现,成为了航海领域的一个热门话题。
本文将从系统设计、实现原理和应用案例等方面,探讨基于人工智能的船舶自动控制系统的相关内容。
首先,基于人工智能的船舶自动控制系统设计需要考虑船舶的不同特点和要求。
这些特点包括船舶的尺寸、航行环境、运输任务等。
系统设计的关键在于如何实现船舶的自主智能决策与操作。
可以考虑引入机器学习、深度学习等人工智能算法,通过对数据的学习和模式识别,使船舶能够自主地做出决策并进行相应的操作。
其次,人工智能船舶自动控制系统的实现原理主要包括传感器获取数据、控制算法处理数据和执行电动机等动作。
传感器是实现船舶自动控制的重要基础,通过收集船舶的航行状态、环境信息、目标物体位置等数据,为系统的决策提供必要的输入。
控制算法根据传感器提供的数据进行决策判断,并输出控制指令,指导船舶的航行和操作。
电动机等执行器根据控制指令的信号,驱动船舶进行相应的操作。
基于人工智能的船舶自动控制系统应用案例多种多样。
一种常见的应用是自动驾驶。
在这种应用中,人工智能算法能够根据船舶当前的状态和环境信息,自主地进行导航和避碰操作,实现船舶的自动驾驶。
这对大型船舶的船队管理,特别是远洋航行而言,具有重要的意义,可以提高航行的安全性和效率。
另外,人工智能算法还可以应用于船舶的故障诊断和预测维护。
通过对大量的船舶运行数据进行分析和学习,系统能够识别出潜在故障的迹象,并提前通知船舶维护人员进行处理,减少船舶故障对航行安全和运输任务的影响。
此外,基于人工智能的船舶自动控制系统还有很多其他的应用领域。
比如,可以应用于船舶货物装卸的自动化控制,提高装卸效率和减少人力成本。
又如,可以应用于船舶的交通流量控制,通过智能算法和通讯技术,对船舶进行实时的调度和协调,优化航行路线,提高港口的吞吐量。
一种无线遥控锚机的电控系统[实用新型专利]
![一种无线遥控锚机的电控系统[实用新型专利]](https://img.taocdn.com/s3/m/4af82248284ac850ac02422d.png)
专利名称:一种无线遥控锚机的电控系统专利类型:实用新型专利
发明人:戴威,李志强,余款田
申请号:CN201720195385.0
申请日:20170302
公开号:CN206480144U
公开日:
20170908
专利内容由知识产权出版社提供
摘要:本实用新型一种无线遥控锚机的电控系统,包括工业遥控器和用于接收所述工业遥控器发射的信号的信号处理系统以及锚机电机M,所述信号处理系统包括信号响应模块和信号控制模块以及连接所述信号响应模块和所述信号控制模块的遥控信号接收模块。
所述工业遥控发射器的信号传输距离可达50米,而且信号向四面八方发射使得信号发射无方向限制,从而使对所述锚机电机的遥控控制更方便。
申请人:湖北海力士电气股份有限公司
地址:438000 湖北省黄冈市黄州工业园(路口镇)
国籍:CN
更多信息请下载全文后查看。
一种无人驾驶船舶自主抛锚控制方法及系统[发明专利]
![一种无人驾驶船舶自主抛锚控制方法及系统[发明专利]](https://img.taocdn.com/s3/m/b763b5d287c24028905fc3ca.png)
专利名称:一种无人驾驶船舶自主抛锚控制方法及系统专利类型:发明专利
发明人:姜雨函,王晓原,夏媛媛,刘亚奇,朱慎超,孙懿飞,张露露
申请号:CN201811556978.0
申请日:20181219
公开号:CN109733537A
公开日:
20190510
专利内容由知识产权出版社提供
摘要:本发明公开了一种无人驾驶船舶自主抛锚的控制方法及系统,根据所选锚地环境状态、船舶自身状态、天气海况判断是否适合锚泊,并根据参数所属的范围,判断实际环境和船舶自身状态,在不同情况下选择不同的抛锚方式和抛锚方法进行抛锚,达到最优抛锚的效果,实现无人船智能抛锚。
本发明利用抛锚设备自主抛锚,可以减少人工干预,提高抛锚效率,实现快速精准抛锚,增加锚泊时间内船舶的安全性。
申请人:智慧航海(青岛)科技有限公司
地址:266200 山东省青岛市即墨区青岛蓝色硅谷海创中心
国籍:CN
代理机构:青岛联智专利商标事务所有限公司
代理人:张少凤
更多信息请下载全文后查看。
船用电动锚机工作原理详解

船用电动锚机工作原理详解
船用电动锚机是船舶上用于锚泊或起锚的设备,它通过电力驱动来完成这些操作。
工作原理如下:
1. 电动机驱动:船用电动锚机内置有一个电动机,通过电源供电,将电能转化为机械能,驱动设备的各个部分运动。
2. 减速机构:船用电动锚机通常配备有减速机构,它的作用是将电动机的高速旋转转化为低速高扭矩的输出。
这有助于提供足够的力量来起锚、缩放或调整锚链长度。
3. 传动装置:减速机构将输出力矩传递给传动装置。
传动装置通常是由链条、齿轮和齿条等组成,将来自减速机构的力量传递给锚链或锚索,以将锚定到海底或升起锚。
4. 控制装置:船用电动锚机还配备了控制装置,以便船员可以控制锚机的启动、停止、变速和反向操作。
控制装置通常是一个控制盘或一个遥控器,通过操纵控制杆或按钮来实现。
5. 锚链或锚索:锚链或锚索是连接锚和锚机的重要部分。
锚机会通过传动装置的运动牵动锚链或锚索,使锚在海底起作用。
总体来说,船用电动锚机通过电动机驱动,经过减速机构和传动装置将力量传递给锚链或锚索,从而起锚、缩放或调整锚链长度。
控制装置可以方便船员对锚机进行操作和控制。
船用拖曳机械的无人化操作与控制技术研究
船用拖曳机械的无人化操作与控制技术研究引言:船用拖曳机械作为船舶运输与海洋工程中不可或缺的设备,其操作与控制技术的研究与创新对于提高船舶的运输效率、促进海洋工程建设具有重要意义。
近年来,随着无人化技术的迅猛发展,将船用拖曳机械的操作与控制实现无人化已成为一个研究热点。
本文将探讨船用拖曳机械无人化操作与控制技术的研究进展,并讨论相关的挑战与应对措施。
一、船用拖曳机械的无人化操作与控制技术现状船用拖曳机械的无人化操作与控制技术旨在实现对该设备的远程控制与自主操作。
目前,该领域主要集中在以下方面的研究:1. 传感技术:通过在船用拖曳机械上安装各类传感器,获取实时环境信息,包括海洋环境参数、工作负载、设备状态等。
常用的传感器包括测距传感器、旋转编码器、气象传感器等。
2. 无线通信技术:无人化操作需要实现远程控制与数据传输,因此,无线通信技术成为关键。
主要采用的通信技术包括卫星通信、无线局域网、蓝牙等,以实现设备与操作员之间的远程通信。
3. 自主导航与路径规划技术:船用拖曳机械作为一种移动设备,需要具备自主导航和路径规划的能力,以实现更加高效的工作。
多种导航技术,如全球定位系统(GPS)、惯性导航系统(INS)等能够提供准确的位置信息,辅以智能路径规划算法,可以实现自主导航与路径规划。
4. 自主控制技术:自主控制技术是实现无人化操作的核心,通常包括机器人控制、自适应控制以及智能控制等方法。
自主控制技术通过对传感器获取的信息进行分析和处理,以实现机器人的自主决策和行动。
二、船用拖曳机械无人化操作与控制技术的挑战尽管船用拖曳机械的无人化操作与控制技术已经取得一定的进展,但仍然面临以下挑战:1. 环境适应性:船用拖曳机械经常在恶劣的海洋环境中工作,如恶劣的天气、强风浪等。
如何保证设备的可靠性、稳定性与安全性是一个长期亟待解决的问题。
2. 实时控制:船用拖曳机械对于实时控制要求较高,需要在复杂多变的环境中实时感知和响应,保障工作的高效性和安全性。
船舶远程操作与无人船舶探索船舶远程操作和无人船舶技术的应用和前景

船舶远程操作与无人船舶探索船舶远程操作和无人船舶技术的应用和前景船舶远程操作和无人船舶技术是近年来迅速发展的领域,它们在船舶运输、海洋勘探和救援等方面发挥着重要的作用。
本文将介绍船舶远程操作和无人船舶技术的背景及其在不同领域的应用,同时对其发展前景进行展望。
一、船舶远程操作的背景随着科技的不断进步,船舶远程操作的概念逐渐被提出。
传统上,船舶操纵和控制都需要人员直接在船舶上进行操作,但这种方式存在一定的安全风险和成本压力。
因此,研究人员开始思考如何通过远程操作技术来改变这种情况。
二、船舶远程操作的应用1. 船舶运输领域船舶远程操作技术在船舶运输领域有着广泛的应用。
通过远程操作技术,船舶操纵员可以在岸上通过传感器和监控设备对船舶进行实时监控和控制,从而提高船舶的安全性和操作效率。
此外,远程操作还可以减少人员在船舶上的工作时间和压力,提高工作环境的舒适性。
2. 海洋勘探领域船舶远程操作技术在海洋勘探领域也有着重要的作用。
通过远程操作技术,研究人员可以远程控制和操作无人船舶来进行海底地质勘探、海洋生物采样和海洋环境监测等工作。
这种方式可以减少人员在海上的工作时间和风险,提高数据采集的效率和准确性。
三、无人船舶技术的背景无人船舶技术是指不需要人员直接操纵的船舶系统。
它利用自主导航、无线通信和传感器等技术来实现船舶的自动化运行。
四、无人船舶技术的应用1. 海洋科学研究无人船舶技术在海洋科学研究中扮演着重要角色。
科研人员可以使用无人船舶携带各种传感器设备,对海洋环境、海底地质和海洋生物进行全面的监测和调查。
这种方式可以减少人力投入,降低成本,提高科学研究的效率和可靠性。
2. 海上救援无人船舶技术在海上救援中具有潜在的应用价值。
通过无人船舶,救援人员可以远程监控和操纵船舶,对事故现场进行救援。
这种方式可以减少救援人员的危险性和工作压力,提高救援效率和成功率。
五、船舶远程操作和无人船舶技术的前景船舶远程操作与无人船舶技术的快速发展显示了其巨大的前景。
船舶锚机可视化远程控制系统设计

船舶锚机可视化远程控制系统设计
刘玉良;赵秋亮;杨君
【期刊名称】《自动化与仪器仪表》
【年(卷),期】2013()4
【摘要】基于船舶锚泊设备的信息化管理要求,设计了一套可视化远程控制系统,包括检测端、主控端、无线数据通信模块和无线视频传输模块。
检测端安装于船上,用来采集和发送锚机及锚链的状态信息;主控端安装于岸上或船头,用来遥控锚机加减速、正反转等;无线数据通信模块在检测端和主控端之间传输锚机工况及控制信息;无线视频传输模块将锚机锚链视频传输给主控端的CRT显示器。
检测端和主控端都以高性价比的单片机芯片STC89C52RC为硬件核心,工作过程单片机通过调节PWM信号的占空比来控制锚机的转速,通过H桥电路控制锚机的转向。
测试表明,所设计的系统能够在1Km以外遥控锚机的运转。
【总页数】3页(P80-81)
【关键词】船舶锚机;可视化;远程控制
【作者】刘玉良;赵秋亮;杨君
【作者单位】浙江海洋学院船舶与海洋工程学院;舟山市港航管理局
【正文语种】中文
【中图分类】TP273
【相关文献】
1.船舶锚泊可视化远程控制系统的研制 [J], 王水富;周骏
2.基于模糊PID算法的船舶锚机控制系统设计 [J], 李元贵;付焕森;曹先锋
3.船舶液力起锚机离合器故障非接触式监测方法 [J], 陈燕飞
4.船舶锚泊可视化远程测控系统设计 [J], 刘玉良;周佐谕
5.基于单片机的船舶锚机远程控制系统设计 [J], 林恩灵;周佐谕;刘玉良
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第l 期(总第118期)2008年6月船舶设计通讯J O U R N A L O F SH JP D E S I C NN 0.1(s e —alN O .118)J une2∞8无人驳的锚机遥控系统研制及应用刘希沪姜伟(上海港复兴船务公司上海200088)[摘要】通过对锚机系统进行研究.利用自动控制和工业无线遥控技术.使操作人员不用登上驳船.仅用一台手持式遥控器就能完成收、放锚作业。
无人驳锚机遥控系统在第4届中国专利与名牌博览会上获得金奖。
[关键词】无人驳;锚机遥控系统;PL c 控制;白控发电机组[中图分类号】U 664.4+2【文献标识码】A[文章编号】100l —拓24(2008)O l -0076一03R es ea r ch and A ppI i c at i ononR e m ot e C ont r olSys t em of Anc hor i n U 砌anned B ar gel i u X i huJi ang Wei A bs t r ac t :111i s paper bas edont he r es e ar chof 锄chorsyst em ,us i ngappl i cat i ∞0f t e chnol og)r ofaut om at i c cont roland i ndust r i al 丽托l ess r em ot e cont rD l s ys t em t o re al i ze t h at t he ope ra t ors ne e dn ’t w ei gh o rdr op t he anehor a 矗ergc t l i ng aboar d t he bar ge ,al l t he wor k coul d be done by t he ope 饱t or t hough ah 卸dhol d c ∞t m l l e r .11he advan ced s ys t em has wo n t he f i rs t pr i z e i n t he N O .4Pat e nt and F 锄ousB r 舳d Exposi t i onofChi m .K e yw or dS :unm anne d bar ge ;r em ot e cont r ol s yst em of anchor ;PLC c ont r ol ;aut om a t i c c ont r ol gene m t or 鸵tU刖昌上海港复兴船务公司现有5艘2000卜10000t的无人驳船.长期从事远洋和中国沿海拖带作业。
无人驳船在海上作业收、放锚时.需要通过拖船将操作人员送至驳船。
再在驳船上操纵锚机进行收、放锚作业。
不但劳动强度大、工作效率低,而且还存在很大的安全隐患,特别是遇到恶劣天气,操作人员的安全会受到极大的威胁。
为了解决这一问题,我们利用当前先进的技术,改变目前的作业方式。
我们将现有的锚机系统改造为遥控锚机系统.既提高工作效率,降低了生产成本,又使操作人员的在作业时更加安全。
目前使用的锚机系统是采用手动操作的方式。
主要存在以下缺点:1)当海上拖带到达锚地时。
因驳船上无人抛锚.使主拖拖船无法解缆,此时需借用其它船舶把操作人员送上驳船.增加了生产成本;2)由于需要现场操作,操作人员在海上登船时,存在一定的安全隐患。
尤其是大风浪天气,对操作人员的安全威胁更大;31锚机的操作完全为手工方式,收放锚的长度靠估算和目测判断,对操作人员的技术水平和现场操作经验要求较高;4)锚机启动前,要启动分散在不同位置的发电机组等设备。
工作效率低;【收稿日期j 2∞84一12[作者简介】刘希沪(1957.12一),船舶中级(轮机长),从事船舶轮机管理工作。
姜伟(1963.7一).高级工程师,从事船舶技术管理工作。
76刘希沪姜伟:无人驳的锚机遥控系统研制及应用5)生产作业中需要多人合作,船舶生产作业成本高。
无线接.II殳系统1无人驳锚机遥控系统的研制系统具备手动、全自动、半自动3种操作模式。
手动模式下,使用改造前的人工操作方式;全自动、半自动模式下,采用遥控器和PLC自动控制方式运行。
对锚机和柴油机发电机组的运行实行自动控制,并监控运行状态。
锚机遥控系统是由工业无线遥控系统、PL C自动控制系统、柴油发电机组和液压锚机系统四大部分组成。
见图l。
操作人员通过遥控器发射相关工作指令,接收器通过接受天线收到信号后,处理还原成相应工作指令.将指令用信号线传递给PLc控制系统.P LC控制系统根据指令和控制程序对柴油发电机组和液压锚机进行控制.从而实现远程遥控柴油发电机的启动、运行、停车和锚机的收锚、放锚。
同时PL C根据设备的运行状态将相关信号通过信号线传递到接收器,接收器将反馈发射给遥控器,使操作人员通过遥控器上相应的指示灯了解设备的运行状态。
图l锚机遥控系统原理示意图在保持柴油发电机组原有功能和操作方式不变的前提下。
对其进行了改造,增加了油门电机、速度转速传感器等设备,将其和PL C控制系统连接,使柴油发电机组的运行。
由P LC自动控制系统对其进行控制.见图2。
当给P LC启动柴油发电机组信号后,系统自动无线系统输入、输出模块I程序存储器I丽习I隔寄存器嗣运算处理器寄存器锚机系统输人、输出模块寄存器图2PL C系统控制流程图柴油机输入、输出模块控制油门电机由停车位置开启到怠速位置,然后给启动马达启动信号。
启动发电机组。
机组有3次启动功能,若第1次启动不成功,经一段延时后再次启动.若第2次启动不成功,则延时后进行第3次启动。
若连续3次启动均不成功,则视为启动失败,发出报警信号,同时油门电机将油门拉回到停车位置。
3次启动中只要有1次成功,就按预先设置的程序往下运行;半自动时,给PLC全速指令,或全自动时怠速运行10m i n(可调)后,油门电机拉动油门,使柴油机发电机组提高到l500撕n.全速运行。
PLc接到合闸信号,如机组发电正常,则系统自动合闸,使柴油发电机组对船上的设备供电.同时将合闸信号反馈到遥控器的合闸指示灯。
机组在运行过程中。
P LC系统自动监控柴油机的运行工况。
如果出现油压过低(<0.2M P)、冷却水温过高(>950C)、转速异常(>l650r,m i n)故障,则系统自动给油门电磁铁信号,切断油路紧急停机,同时发出报警信号;如果出现水温高(>900C)、油温高等故障。
则发出声光报警信号,提醒维护人员进行干预。
紧急情况能自动停车。
防止柴油发电机组设备损坏。
PL C自动控制系统控制液压锚机的自动收,放锚。
放锚时,当给PL C一个放锚信号,系统自动地按顺序打开掣链器、刹车,启动锚机放锚到指定3节或77第1期(总第118期) 2008年6月船舶设计通讯J O U R N A L O F S H I P D E Sl G NN0.1(Ser i al N0.118)J une20085节。
然后停止放锚,自动锁紧刹车,关闭掣链器。
通过安装在锚机齿轮下的接近开关反馈给PLC的脉冲信号,自动记录已放下的锚链长度。
收锚时,依次打开刹车和掣链器,并依据先前记录的锚链长度,收回全部放下的锚链。
最后停止锚机、锁紧刹车和关闭掣链器。
也可以根据实际情况,给PLC连续收、放锚信号.连续收锚或放锚任意长度,直到接到停止信号。
为了增加系统的可靠性能,在收,放的控制程序中.增加了相关的自检和锚机设备保护功能,防止将锚链全部放完。
配备2个用于锚链记数的接近开关,起到安全容错的功能。
如果其中一个有故障,则在收、放锚作业中,灯光闪烁,提示报警,但不影响使用。
如果两个接近开关同时出现故障,不仅闪烁提示报警。
而且锁死自动收、放锚功能。
此时只能遥控半自动收、放锚。
以防将锚链全部放完或损坏锚机设备。
操作人员利用工业无线遥控器.通过遥控器上的按钮。
遥控发射信号给安装在驳船上的接收机,该接收机通过线缆与PL C控制箱连接.将操作人员发出的各种信号传递给P LC。
系统按着操作人员发出的信号.自动执行各个动作。
柴油发电机组、锚机和油泵的运行工况.如:柴油发电机组的运行状况、油泵的运行状况、锚机的运行、掣链器和刹车的开关位置等,通过P LC将该信号传到接收器,接收器将其处理发射给遥控器.通过遥控器上相关的状态指示灯。
使操作人员实时了解设备的运行状态。
无线遥控器的发射机和接收器的通信采用430kH z一435kH z的频率,实时连续双向通讯;自动寻频索定追踪,同步编解码传输。
并且,每套系统具有独立地址码。
保证系统通信可靠,且不受错误指令干扰。
2无人驳锚机遥控系统研制后达到的功能鉴于目前设备存在的缺点,通过自动控制技术和无线通讯技术的集成。
将驳船上的发电机组和锚机改为P I£控制的自动系统,集中为无线遥控操作,使操作人员不用登船。
只要一人在拖轮上,通过一个遥控器就对所有的设备进行操作。
这样一来,既能减少作业的辅助时间.又能很轻松地完成放锚、收锚作业。
整个系统具有以下功能:7811不仅自动控制发电机组的启动、停车,还能监控柴油机的运行工况:水温、油压和转速。
紧急情况下能自动停车。
防止柴油发电机组设备损坏。
2)系统控制液压锚机的自动收/放锚。
放锚时,自动打开掣链器、刹车,启动锚机放锚到指定节数。
然后停止放锚,自动锁紧刹车,关闭挚链器,系统自动记录已放锚的长度。
收锚时,依次打开刹车和挚链器,收回全部放下的锚链。
最后停止锚机、锁紧刹车和关闭挚链器。
3)实时显示设备运行状况,并具备一定的设备自检测、安全容错和保护功能。
防止实际使用中设备的损坏。
3效用试验和实船使用通过在海港特3002驳船上的试验。
该系统能很好地完成柴油发电机组的启动、停止和运行监控.锚机能根据遥控指令。
自动完成放锚、收锚等一系列动作.并能通过遥控器上的各种反馈信号指示灯,清楚地了解柴油机发电机组、锚机、掣链器、刹车等工作状态。
PL C控制的自动化柴油发电机组和锚机系统,硬件结构简单,响应速度快,性能、价格比很高,和单片机系统相比具有极高的可靠性。
2008年1月,经上海一烟台实船试验。
该系统性能稳定、操作简单,只需一名操作人员在拖轮上,用手持式遥控器,在500m范围内,就可实现自动收、放锚作业。
没有误动作发生。
运行可靠。
4结语锚机遥控系统集成了无线通讯技术、自动控制技术和液压技术。
它成功地把多项技术集成在一个小型的遥控锚机系统内.使原来的操作智能化、简单化.减少了企业的生产作业成本,彻底地解除了操作人员的安全隐患。
也极大地提高了工作效率。
在企业竞争日益激烈的今天。
无人锚机遥控系统非常符合企业所追求的安全、高效、降本增益的目标,具有良好的应用前景。
2007年11月.无人驳锚机遥控系统在第4届中国专利与名牌博览会上获得金奖。