贴片机x-y运动横梁结构设计研究
《2024年大型龙门铣床新型横梁的研究与设计》范文

《大型龙门铣床新型横梁的研究与设计》篇一摘要:随着制造业的持续发展和精密加工的需求提升,大型龙门铣床作为现代工业的重要设备,其性能与精度对加工质量具有决定性影响。
横梁作为龙门铣床的关键部件,其结构设计直接影响着机床的承重能力、运动精度和整体性能。
本文旨在研究并设计一种新型横梁结构,以提升大型龙门铣床的加工性能和稳定性。
一、引言随着科技的进步和制造业的飞速发展,龙门铣床在各类机械加工领域的应用日益广泛。
横梁作为龙门铣床的骨架,其结构设计及性能直接关系到机床的加工精度、工作效率及使用寿命。
因此,对新型横梁的研究与设计显得尤为重要。
二、新型横梁设计要求及原则1. 结构稳定性:新型横梁应具备足够的刚性和稳定性,以承受加工过程中的重载和高速运动。
2. 轻量化设计:在保证结构强度的前提下,应尽量减轻横梁的重量,以降低能耗和提高运动速度。
3. 精度与耐磨性:横梁的设计应考虑其加工精度和耐磨性,以保证长期使用的稳定性和准确性。
4. 可维护性:结构应便于维护和检修,减少故障率,提高设备的使用寿命。
三、新型横梁结构设计1. 材料选择:选用高强度、轻质合金材料作为横梁的主体结构材料,以提高其承载能力和抗振性能。
2. 结构布局:采用双梁式结构,通过优化布局提高横梁的刚性和稳定性。
同时,采用模块化设计,便于后期维护和升级。
3. 导向与支撑系统:设计精确的导向系统和支撑结构,确保横梁在运动过程中的精度和稳定性。
4. 传动系统:选用高效、低噪音的传动系统,保证横梁运动的平稳性和速度控制精度。
四、设计流程及分析1. 初步设计:根据设计要求,完成新型横梁的初步设计方案。
2. 有限元分析:利用有限元分析软件对设计方案进行强度、刚度和稳定性的分析,验证设计的合理性。
3. 模型制造与试验:制造样机进行实际加工和运动测试,验证设计方案的可行性和性能。
4. 优化与改进:根据试验结果,对设计方案进行优化和改进,进一步提高横梁的性能和稳定性。
高精度贴片机横梁结构动态优化设计_孙继斌_骆敏舟_姜涛_毕世书
145.89
178.09
5 结论
通过对贴片机 X 轴运动模块进行动态性能分析,得到了 X
轴运动模块的前三阶频率和模态振型,从而找到了贴片机横梁的
薄弱敏感位置,将高精度贴片机结构部件分块模态分析,提高了
贴片机的优化设计速度。分析了贴片机横梁内外部结构对贴片机
图 6 横梁内部三种不同单元结构 Fig.6 Internal Structure Units of Three Different Beam
一阶模态频率 f(Hz)
二阶模态频率 f(Hz)
228 227 226 225 224 223 222
结构 1 结构 2 结构 3 结构 4 横梁外部四种不同结构 (a)
表 2 X 轴运动模块的固有频率和振型特征 Tab.2 X Axis Movement Module of Natural
Frequency and Vibration Mode
阶数
固有频率
振型
二阶模态频率 f(Hz)
301 300 299 298 297 296 295 294 293
4
(a)
6
8 10 12 14 16
第8期
机械设计与制造
2014 年 8 月
Machinery Design & Manufacture
45
高精度贴片机横梁结构动态优化设计
孙继斌 1,2,骆敏舟 2,姜 涛 2,毕世书 2
(1.常州大学,江苏 常州 213164; 2.中国科学院合肥物质科学研究院 先进制造技术研究所,江苏 常州 213164)
4.2 横梁的外部结构参数分析
在贴片机的横梁结构中,总体的“U”型尺寸结构已经确定, 从横梁的低阶模态可以分析出横梁的中部的刚度不足,易发生振 动,故提出了两种横梁外部结构,如图 4 所示。将这两种结构与原 结构的模态进行分析比较,如图 5 所示。从图 5 中可以看出,三种
科研训练论文 贴片机研究与结构设计
贴片机研究与结构设计学院:专业:班级:学号:姓名:检索报告万方数据/基于视觉的高速高精度贴片机系统的程序实现.胡跃明/view/%E5%9F%BA%E4%BA%8E%E8%A7%86%E8%A7 %89%E7%9A%84%E9%AB%98%E9%80%9F%E9%AB%98%E7%B2%BE%E5%BA%A6%E 8%B4%B4%E7%89%87%E6%9C%BA%E7%B3%BB%E7%BB%9F%E7%9A%84%E7%A8% 8B%E5%BA%8F%E5%AE%9E%E7%8E%B0.aspx?ID=Periodical_jsjjczzxt200309009&tra nsaction=%7b%22ExtraData%22%3a%5b%5d%2c%22IsCache%22%3afalse%2c%22Tr ansaction%22%3a%7b%22DateTime%22%3a%22%5c%2fDate(1432891121080%2b0 800)%5c%2f%22%2c%22Id%22%3a%22d2f497ef-77d9-4052-901f-a4a7011d4886%22 %2c%22Memo%22%3anull%2c%22ProductDetail%22%3a%22Periodical_jsjjczzxt200 309009%22%2c%22SessionId%22%3a%222d7e2ecf-518e-4fee-948e-ed77cab5ddcc% 22%2c%22Signature%22%3a%22s6A7F1o%5c%2fTo%5c%2fa%5c%2fgAfonzCn2YDy3s 1AvOApJH8sKpscyN3ETBzvXg3Wu69KOD7pBV2%22%2c%22TransferIn%22%3a%7b% 22AccountType%22%3a%22Income%22%2c%22Key%22%3a%22PeriodicalFulltext%2 2%7d%2c%22TransferOut%22%3a%7b%22AccountType%22%3a%22GTimeLimit%22 %2c%22Key%22%3a%22hljdx%22%7d%2c%22Turnover%22%3a3.00000%2c%22User %22%3anull%2c%22UserIP%22%3a%22221.208.24.156%22%7d%2c%22TransferOut AccountsStatus%22%3a%5b%5d%7d贴片机贴装印刷电路板中供料器的分配问题.曾又姣/view/%E8%B4%B4%E7%89%87%E6%9C%BA%E8%B4 %B4%E8%A3%85%E5%8D%B0%E5%88%B7%E7%94%B5%E8%B7%AF%E6%9D%BF%E 4%B8%AD%E4%BE%9B%E6%96%99%E5%99%A8%E7%9A%84%E5%88%86%E9%85% 8D%E9%97%AE%E9%A2%98.aspx?ID=Periodical_shjtdxxb200311019&transaction=% 7b%22ExtraData%22%3a%5b%5d%2c%22IsCache%22%3afalse%2c%22Transaction% 22%3a%7b%22DateTime%22%3a%22%5c%2fDate(1432891147508%2b0800)%5c%2f %22%2c%22Id%22%3a%22305b8796-4ff1-4586-b978-a4a7011d677e%22%2c%22Me mo%22%3anull%2c%22ProductDetail%22%3a%22Periodical_shjtdxxb200311019%22%2c%22SessionId%22%3a%222d7e2ecf-518e-4fee-948e-ed77cab5ddcc%22%2c%22S ignature%22%3a%22WpvJzAwifAXP05GqvEseKKID27JYNQfBLaXA5fdEI2WhC0bdfB0u bp22jb6bov6w%22%2c%22TransferIn%22%3a%7b%22AccountType%22%3a%22Inco me%22%2c%22Key%22%3a%22PeriodicalFulltext%22%7d%2c%22TransferOut%22%3 a%7b%22AccountType%22%3a%22GTimeLimit%22%2c%22Key%22%3a%22hljdx%22 %7d%2c%22Turnover%22%3a3.00000%2c%22User%22%3anull%2c%22UserIP%22% 3a%22221.208.24.156%22%7d%2c%22TransferOutAccountsStatus%22%3a%5b%5d% 7d维普期刊资源整合服务平台/国产LED贴片机的设计与研究.仲崇东/read/detail.aspx?ID=663617725LED贴片机技术应用与新进展.韩鹏飞/read/detail.aspx?ID=662099809中国知网/中国贴片机市场新格局.胡金荣./kcms/detail/detail.aspx?filename=DZJL2006040 24&dbcode=CJFQ&dbname=cjfd2006&v电子制造装备贴片机的贴片头结构设计与控制.徐玲艳./KCMS/detail/detail.aspx?QueryID=0&CurRec=3 &recid=&filename=2010153486.nh&dbname=CMFD2011&dbcode=CMFD& pr=&urlid=&yx=&uid=WEEvREcwSlJHSldSdnQ1Wml5b28ycnBEZUhwbGdkU 0xoTUJKTFYxSFkrN2V4VTUzWnJoTkJSdFU5cVVEdGJrUHNRPT0=$9A4hF_YAu vQ5obgVAqNKPCYcEjKensW4IQMovwHtwkF4VYPoHbKxJw!!&v=M TMwNjFy Q1VSTCtmWXVSc0ZDdmxWcjdNVjEyNkhySzlIZFhFcVpFYlBJUjhlWDFMdXhZ UzdEaDFUM3FUcldNMUY新东方多媒体学习库/online/library.jsp总结报告一、选题背景、研究意义及文献综述1.选题背景贴片机:又称“贴装机”、“表面贴装系统”,在生产线中,它配置在点胶机或丝网印刷机之后,是通过移动贴装头把表面贴装元器件准确地放置PCB焊盘上的一种设备。
贴片机XY轴快速高精度定位的实现
贴片机X/Y轴快速高精度定位的实现作者:刘明晓龙绪明罗爱玲贺海浪来源:《现代电子技术》2014年第17期摘要:负载惯量和外界干扰是影响贴片机[X,][Y]轴快速高精度定位的两个关键因素。
本文针对负载惯量和外界干扰对控制性能的影响,提出了基于RBF神经网络的自适应滑模控制算法。
利用RBF神经网络的万能逼近特性实现对外加干扰和被控对象模型信息的逼近,运用自适应控制算法计算前馈补偿量以补偿负载惯量和摩擦力对运动性能的影响,采用滑模控制算法以抑制其他不确定干扰对运动控制的影响。
通过仿真分析可以得出,所采用的控制算法能够有效地补偿负载惯量和外界干扰对定位性能的影响,从而实现贴片机[X,][Y]轴的快速高精度定位。
关键词:贴片机;快速高精度定位;运动控制; RBF神经网络;自适应滑模控制中图分类号: TN710⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)17⁃0157⁃03Abstract: The load inertia and the outside disturbance are the key factors that affectX/Y⁃axis high⁃precision fast position of SMT placement. An adaptive sliding mode control algorithm based on RBF neural network is proposed in this paper to eliminate the influence of load inertia and outside interference. The universal approximation property of RBF neural network is used to realize approximation of external disturbance and model information of the controlled object.Feed⁃forward compensation amount calculated by using the adaptive control algorithm is used to compensate the load moment of inertia and friction effects on motion performance. The sliding mode control algorithm is adopted to suppress the influence of other uncertain disturbance on motion control. The simulation analysis indicates that the control algorithm can effectively compensate the efforts of load inertia and outside interference on positioning performance, so as to realize the high⁃precision rapid positioning of X⁃ and Y⁃axis in SMT placement.Keywords: SMT placement; high⁃precision rapid positioning; motion control; RBF neural network; adaptive sliding mode control0 引言贴片机[X,][Y]轴运动控制的工作状态是高加速、高速地在点到点之间运行,并且在定位点处实现精确定位。
《2024年大型龙门铣床新型横梁的研究与设计》范文
《大型龙门铣床新型横梁的研究与设计》篇一一、引言在现代化的机械加工领域,大型龙门铣床以其高精度、高效率的特点被广泛应用于各种复杂零件的加工中。
其中,横梁作为龙门铣床的关键部件之一,其设计质量直接影响着设备的整体性能和加工精度。
因此,对大型龙门铣床新型横梁的研究与设计具有重要的现实意义。
本文旨在通过对新型横梁的设计与研究,以提高设备的加工效率和精度,满足日益增长的工业生产需求。
二、新型横梁的研究背景及意义随着工业技术的不断发展,对机床设备的精度和效率要求越来越高。
传统的龙门铣床横梁在加工大尺寸、复杂形状的工件时,往往存在精度不高、效率低下等问题。
因此,研究与设计新型横梁成为提高龙门铣床性能的关键。
新型横梁的设计不仅能够提高设备的加工精度和效率,还能满足各种复杂工件的加工需求,具有重要的研究意义和实际应用价值。
三、新型横梁的设计要求1. 结构稳定性:新型横梁应具备较高的结构稳定性,以保证在长时间、高负荷的工作过程中保持稳定的加工精度。
2. 轻量化设计:在保证结构强度的前提下,应尽量减轻横梁的重量,以提高设备的动态性能和加工效率。
3. 高精度导向:新型横梁应采用高精度的导向装置,以保证工件的加工精度。
4. 良好的热性能:在高速、高负荷的工作过程中,横梁应具备良好的热性能,以减少热变形对加工精度的影响。
四、新型横梁的设计方案1. 结构设计:采用高强度、轻质材料制作横梁主体结构,同时增加加强筋以提高结构稳定性。
在横梁两端设置导向装置,以保证工件的加工精度。
2. 轻量化设计:通过优化结构设计,采用先进的制造工艺,实现横梁的轻量化设计。
同时,在保证结构强度的前提下,尽量减少材料的使用量。
3. 高精度导向装置:采用高精度的导向装置,如滚动导轨或直线导轨等,以提高工件的加工精度。
4. 热性能优化:在横梁设计中考虑热性能的优化,如采用散热性能好的材料、增加散热装置等措施,以减少热变形对加工精度的影响。
五、新型横梁的制造与测试1. 制造工艺:采用先进的制造工艺和技术,如数控加工、焊接、表面处理等,确保新型横梁的制造质量和精度。
贴片机的X、Y、Z轴原理
X-Y 定位系统是评价贴片机精度的主要指标,它包括传动机构和伺服系统;贴片速度的提高意味着X-Y 传动机构运行速度的提高而发热,而滚珠丝杆是主要的热源,其热量的变化会影响贴装精度,最新研制的X-Y 传动系统在导轨内设有冷却系统;在高速贴片机中采用无磨擦线性马达和空气轴承导轨传动,运行速度做得更快。
(此文有深圳市金狮王科技有限公司又称SMT之家所提供)X-Y 伺服系统(定位控制系统)由交流伺服电机驱动,并在传感器及控制系统指挥下实现精确定位,因此传感器的精度起关键作用。
位移传感器有园光栅编码器、磁栅尺和光栅尺。
1. 园光栅编码器园光栅编码器的转动部位上装有两片园光栅,园光栅由玻璃片或透明塑料制成,并在片上镀有明暗相间的放射状铬线,相邻的明暗间距称为一个栅节,整个园周总栅节数为编码器的线脉冲数。
铬线的多少也表示精度的高低。
其中一片光栅固定在转动部位作指标光栅,另一片则随转动轴同眇运动并用来计数,因此指标光栅与转动光栅组成一对扫描系统,相当于计数传感器。
园光栅编码器装在伺服电机中,它可测出转动件的位置、角度及角加速度,它可以将这些物理量转换为电信号舆给控制系统。
编码器能记录丝杆的放置数并将信息反馈给比较器,直至符合被线性量。
该系统抗干扰性强,测量精度取决于编码器中光栅盘上的光栅数及溢珠丝杆导轨的精度。
2.磁栅尺由磁栅尺和磁头检测电路组成,利用电磁特性和录磁原理对位移进行测量。
磁栅尺是在非导磁性标尺基础上采用化学涂覆或电镀工艺在非磁性标尺上沉积一层磁性膜(一般10~20um)在磁性膜上录制代表一定年度具有一定波长的方波或正弦波磁轨迹信号。
磁头在磁栅尺上移动和读取磁恪,并转变成电信号输入到控制电路,最终控制AC伺服电机的运行。
磁栅尺的优点是制造简单、安装方便、稳定性高、量程范围大,测量精度高达1~5um,贴片精度一般在0.02mm。
3.光栅尺由光栅尺、光栅读数头与检测电路组成。
光栅尺是在透明下班或金属镜面上真空沉积镀膜,利用光刻技术制作均匀密集条纹(每毫米100~300 条),条纹距离相等且平等。
《2024年大型龙门铣床新型横梁的研究与设计》范文
《大型龙门铣床新型横梁的研究与设计》篇一一、引言随着现代制造业的快速发展,大型龙门铣床作为重要的加工设备,在机械制造、航空航天、模具制造等领域发挥着举足轻重的作用。
其中,横梁作为龙门铣床的关键部件,其性能直接影响到整个设备的加工精度和稳定性。
因此,对大型龙门铣床新型横梁的研究与设计显得尤为重要。
本文将详细介绍新型横梁的研究背景、目的及意义,为后续的设计提供理论依据。
二、研究背景及目的随着科技的不断进步,传统龙门铣床的横梁结构已无法满足现代高精度、高效率的加工需求。
因此,研究新型横梁结构,提高设备的加工性能和稳定性,成为当前亟待解决的问题。
本研究的目的在于设计一款新型横梁,以提高龙门铣床的加工精度、承载能力和稳定性,满足不同领域对高精度加工设备的需求。
三、新型横梁的设计要求在设计新型横梁时,需考虑以下要求:1. 加工精度:新型横梁应具有较高的加工精度,以满足高精度加工的需求。
2. 承载能力:新型横梁应具有足够的承载能力,以适应不同工件的加工需求。
3. 稳定性:新型横梁应具有良好的稳定性,确保在长时间、高强度的工作中保持性能稳定。
4. 结构优化:在满足上述要求的前提下,对横梁结构进行优化设计,减轻重量,提高整体性能。
四、新型横梁的设计思路针对新型横梁的设计要求,我们提出以下设计思路:首先,通过深入研究国内外先进的横梁设计理念和技术,结合实际需求,确定新型横梁的基本结构。
其次,采用高强度、轻质材料,以提高横梁的承载能力和稳定性,同时减轻重量。
再次,通过优化设计,使横梁的结构更加合理,提高其加工精度和稳定性。
最后,通过严格的测试和验证,确保新型横梁的性能达到设计要求。
五、设计流程及实施方案1. 制定设计方案,明确设计目标和技术指标。
2. 对新型横梁的结构进行详细设计,包括尺寸、形状、材料等。
3. 利用有限元分析等手段对设计进行仿真验证,确保设计的合理性。
4. 制作样品,进行严格的测试和验证。
5. 根据测试结果对设计进行优化和调整。
贴片机XY轴和PCB运动控制系统设计

贴片机 XY轴和 PCB运动控制系统设计摘要:本文通过开发一种适用于贴片机领域的XY轴(伺服电机)以及PCB 传输机构(步进电机)集成控制上层系统,以实现贴片机相机触发控制技术、路径优化技术和实时反馈技术。
关键词贴片机 X轴 Y轴 PCB控制系统贴片机是现代电子制造装备的标志性设备,它横跨电子、机械、自动化、光学和计算机等众多学科,涉及精密视觉检测、高速高精度控制、精密机械加工和计算机集成制造等核心技术,贴片机的发展与进步直接影响着整个国家电子信息产业的发展,然而基于贴片机研发高难度和高成本,高端国产贴片机的产业化以及技术水平与国外贴片机的市场占有率及先进的技术相比还有很大的差距,严重制约了国家电子信息产业的发展与进步,为此特研发具有完全独立自主技术的高集成模块化贴片机上层控制系统。
针对贴片机控制的特殊性,开发一种适用于贴片机领域的XY轴(伺服电机)以及PCB传输机构(步进电机)集成控制系统的上层控制系统。
运动控制技术经历了从直流电气传动到交流电气传动、从开环控制到闭环控制、从专用型到开放式,最终形成了基于网络的运动控制系统。
运动控制技术的发展能够带动产业的快速发展和技术的迅速提升。
开放式的运动控制系统能够有效利用控制器强大的计算能力来完成复杂的运动,这样也就促使控制系统朝着响应速度更快、定网势位精度更准确以及稳态误差更小的方向发展;充分利用网络可以减小系统元件之间直接连接,从而可以降低各个设备之间数据传输的误差,从而提高系统运行的可靠性。
1贴片机XY轴和PCB运动控制系统的工作流程主要包括:微处理器通过串口从上位机软件中获取所需的通信数据,从中解析出贴装的动作和相关元件贴装坐标信息以及对应的料站信息;根据得到的运动坐标以及物料仓对应的坐标进行轴运动,并在移动过程中进行插补运算和速度规划,到达目标位置后根据解析后的动作进行贴装;通过相机捕捉到的Mark点坐标加入偏差矫正,根据下发数据量进行重复贴装动作。
贴片机的技术和原理
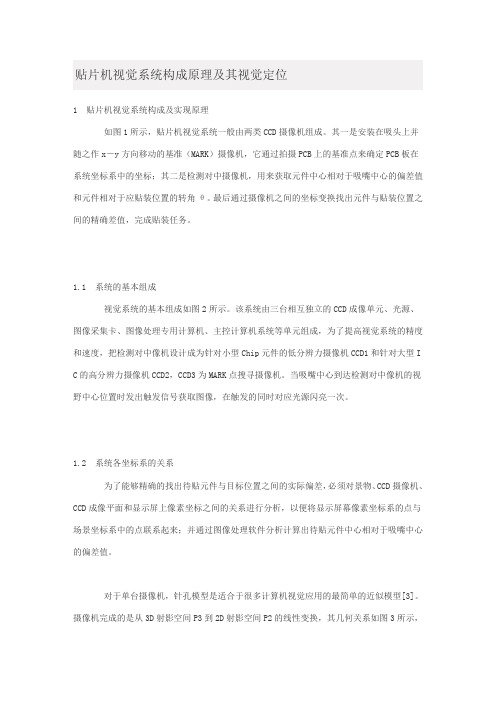
贴片机视觉系统构成原理及其视觉定位1 贴片机视觉系统构成及实现原理如图1所示,贴片机视觉系统一般由两类CCD摄像机组成。
其一是安装在吸头上并随之作x-y方向移动的基准(MARK)摄像机,它通过拍摄PCB上的基准点来确定PCB板在系统坐标系中的坐标;其二是检测对中摄像机,用来获取元件中心相对于吸嘴中心的偏差值和元件相对于应贴装位置的转角θ。
最后通过摄像机之间的坐标变换找出元件与贴装位置之间的精确差值,完成贴装任务。
1.1 系统的基本组成视觉系统的基本组成如图2所示。
该系统由三台相互独立的CCD成像单元、光源、图像采集卡、图像处理专用计算机、主控计算机系统等单元组成,为了提高视觉系统的精度和速度,把检测对中像机设计成为针对小型Chip元件的低分辨力摄像机CCD1和针对大型I C的高分辨力摄像机CCD2,CCD3为MARK点搜寻摄像机。
当吸嘴中心到达检测对中像机的视野中心位置时发出触发信号获取图像,在触发的同时对应光源闪亮一次。
1.2 系统各坐标系的关系为了能够精确的找出待贴元件与目标位置之间的实际偏差,必须对景物、CCD摄像机、CCD成像平面和显示屏上像素坐标之间的关系进行分析,以便将显示屏幕像素坐标系的点与场景坐标系中的点联系起来;并通过图像处理软件分析计算出待贴元件中心相对于吸嘴中心的偏差值。
对于单台摄像机,针孔模型是适合于很多计算机视觉应用的最简单的近似模型[3]。
摄像机完成的是从3D射影空间P3到2D射影空间P2的线性变换,其几何关系如图3所示,为便于进一步解释,定义如下4个坐标系统:(1)欧氏场景坐标系(下标为w):原点在OW,点X和U用场景坐标系来表示。
(2)欧氏摄像机坐标系(下标为c),原点在焦点C=Oc,坐标轴Zc与光轴重合并指向图像平面外。
在场景坐标系和摄像机坐标系之间存在着唯一的关系,可以通过一个平移t和一个旋转R构成的欧氏变换将场景坐标系转化为摄像机坐标。
其关系如式(1)所示:(3)欧氏图像坐标系(下标为i),坐标轴与摄像机坐标系一致,Xi和Yi位于图像平面上,Oi像素坐标系的坐标为(xp0,yp0)。
X-Y数控工作台机电系统设计

X-Y数控工作台机电系统设计简介本文档旨在介绍X-Y数控工作台的机电系统设计方案。
X-Y数控工作台是一种能够实现在二维平面上进行精密定位和移动的工作台,通常用于加工、装配和检测等工作场景。
机电系统是该工作台的核心组成部分,负责控制工作台的运动和定位。
机械结构X-Y数控工作台的机械结构采用传统的XY平面结构,其中X轴和Y轴分别对应水平方向和垂直方向的移动。
工作台通过导轨、丝杠和电机实现位置的精密控制。
机械结构的设计需要考虑以下几个方面:1.刚性:机械结构需要具备足够的刚性,以保证工作台在运动和加工过程中的稳定性和精度。
2.导轨选型:导轨是机械结构的关键组成部分,需要选择高精度、低摩擦的导轨,以实现工作台的准确定位。
3.丝杠传动:为了保证工作台的高速运动和高精度定位,通常采用丝杠传动和步进电机驱动的方式。
丝杠需要选择精度高、承载能力强的型号,并考虑到丝杠的进给速度和负载特性。
4.电机选型:电机是工作台实现运动的关键,需要选择合适的步进电机或伺服电机。
选取电机时需要考虑到运动速度、加速度、精度要求和负载特性等因素。
电气控制系统电气控制系统是X-Y数控工作台的关键组成部分,负责实现机械系统的运动控制和位置定位。
电气控制系统的设计需要考虑以下几个方面:1.控制器:选择合适的数控控制器,如PLC、CNC等,能够满足工作台运动控制的要求,包括速度、加速度、精度和多轴控制等。
2.编码器:为了实现位置的准确度,可以在电机和丝杠之间增加编码器,通过反馈信号实时检测位置,从而调整电机的控制信号。
3.电气线路:设计合理的电气线路,包括电源线路、信号线路和电机驱动器连接线路等。
电源线路需要满足工作台电气设备的功率需求,而信号线路需要保证稳定和可靠的传输控制信号。
4.驱动器:选择适合的电机驱动器,根据电机类型和工作台运动需求确定驱动器的性能指标,如控制精度、输出功率和最大电流等。
软件控制系统软件控制系统是X-Y数控工作台的核心,通过编程实现工作台的运动控制和位置定位。
贴片机x-y运动横梁结构设计研究
收 稿 日期 :0 7 0 —2 2 0 —7 1
的 , 它通 过 移 动 安 装 于 — 动 框 架 中 的 贴 装 头 y运
( 般 是 装 在 轴 横 梁 上 ) 一 ,进 行 吸 片和 贴 片 动 作
Ab t a t s r c :Hi h s e n hi g pe d a d
p e ii n a e t e p i cpa ha a tr ft lc m e tma h ne n he r c so r h rn i lc r c e s o he p a e n c i .I t
摘 要:高速 、 高精度 是 贴 片机 的 主要 特征 。在 框 架 式 贴片机 中 , 梁的质 量 与 刚度 是 决定 整机 速 横 度 和精 度 的主 要 因素 。横 梁 的结构 形 式 、 与传 动 机 构 的连接 方式 、 料 等都 直 接 影 响横 梁 的质 量 材 与 刚度 值 。通 过 综合 分析 传动 机 构 与横 梁不 同连接 方式 的利 弊 , 中选择 能 够 满足设 计要 求 的连 从 接 方式 。在 此 基础 上 . 对横 梁结构 进行 数值 仿 真分 析 与优 化 , 而达到 了降低 横 梁质量 、 高刚度 从 提
全自动贴片机横梁设计与动力学仿真

2 Gu n z o a g h n c. T c . nep i s .Ld, a gh uGu n d n 15 0 C ia . a g h uY n c e gS i& e h E t r e , t.Gu n z o a g o g5 2 , hn ) r s Co 0
维普资讯
第 1 卷 增- 5 7 1 J—8 1 06S —3 00 0 60 7 ( 0 ) 10 4 —4 2
计 算 机 辅 助 工 程
C0M P UT ER DED AI ENGI E NG NE RI
用面 积最 小 ;
( 横梁跨距 问题需综合考虑 以下情况 :① 4)
需要并排放置 5 个送料器 ( 8 i 送料器 为例 ) O 以 n m ;
缩短产品研制周期 ,节约开发费用 . 【 l J
1 结构 设 计
1 横梁主要设计 目标及传动 结构组 成 . 1 文中坐标方向定义 :横梁的轴线方向为 向,
V 1 1 u p o. 5S p l S p 2 0 e .0 6
全 自动贴片机横梁设计 与动力学仿真
肖永 山 , 宋福 民 ,刘 少 军
(.中南大学 机 电工程 学院 ,湖 南 长沙 1 4 0 8 ;2 州 羊城 科技 实业有 限公 司 ,广 东 广 州 5 0 2 ) 10 3 .广 15 0
摘
要 :基 于 MS a 对三种贴片机横 梁的设 计方案进行动 力学仿真分析 ,从整机的动 C Adms
力学性能 、抗振动 能力及加工 工艺性 角度进行对 比分析 . 通过分析 ,确 定横 梁的优 化设计方 案 ,进而为提 高贴片机 的精度 与速度提供数据. 关键词 :贴片机 ;横 梁设计 ;动 力学;MS dms CA a
高速贴片机横梁的结构动力学分析与优化
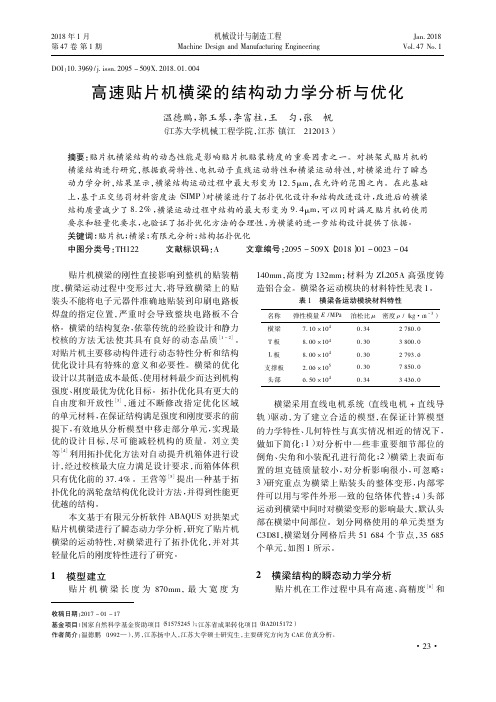
名称 横梁 T板 L板 支撑板 头部
弹性模量 E / MPa 7. 10 × 104 8. 00 × 104 8. 00 × 104 2. 06 × 105 6. 50 × 104
泊松比 μ 密度 ρ / ( kg·m 0
0. 30
3 800. 0
0. 30
2 793. 6
况进行分析。本文研究的 TS - 320M - 02 高速贴
片机贴料时要求直线电机在 45ms 内沿着 Y 方向移
动 12mm。
由S
=
1 2
at2
和
Vt
= V0
+ at 列式并化简得:
at2 = S
( 1)
式中: a 为横梁结构的加速度; V0 为横梁结构的初始 速度; Vt 为匀加速结束时刻横梁结构的速度; S 为一 周 期 里 横 梁 结 构 移 动 的 位 移。将 V0 = 0、t = 0. 022 5s、S = 12mm 代 入 式 ( 1) 计 算 得 a = 23. 7 m / s2 。由表 1 中材料的特性测得横梁结构运动系统
2018 年 1 月 第 47 卷 第 1 期
机械设计与制造工程 Machine Design and Manufacturing Engineering
Jan. 2018 Vol. 47 No. 1
DOI: 10. 3969 / j. issn. 2095 - 509X. 2018. 01. 004
一种贴片机XY轴运动及PCB传输集成控制系统[实用新型专利]
![一种贴片机XY轴运动及PCB传输集成控制系统[实用新型专利]](https://img.taocdn.com/s3/m/d41c78e379563c1ec4da7195.png)
专利名称:一种贴片机XY轴运动及PCB传输集成控制系统专利类型:实用新型专利
发明人:彭涛,程治国,吴克桦,吴志达
申请号:CN201720016244.8
申请日:20170106
公开号:CN206348638U
公开日:
20170721
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种贴片机XY轴运动及PCB传输集成控制系统,包括主控模块、XY轴伺服电机控制模块、PCB传输机构步进电机控制模块以及对应的主PCB底板、XY轴控制板、PCB传输控制板三块PCB板,在所述三块PCB板上集成各自的接口模块;采用控制PCB板与驱动PCB板分离式模块化设计,很大程度的简化了贴片机系统的调试与测试流程,提高系统工作效率;另外避免上层分配过多线程处理重复性过程,节省了上层系统资源,提升了贴片机整体上层系统性能,简化了上层软件在PCB传输控制模块的设计方式,并且提升了贴片机在PCB传输控制中的稳定性。
申请人:广东华志珹智能科技有限公司
地址:528000 广东省佛山市顺德区大良街道办事处五沙社区居民委员会新凯路7号科盈国际工业园一期厂房一的二层205单元
国籍:CN
更多信息请下载全文后查看。
拱架式贴片机横梁刚柔耦合动态仿真优化设计_姜涛

弹性变形和外加载荷引起的广义力。对式(1)~式(7)左边进
一步推导,可以得到:
T
觶 觶 觶觶 Miq咬 i+M觶 iq觶 i-
坠 坠qi
1 qiTM觶 iq觶பைடு நூலகம்i 2
(8)
令:
T
觶 觶 i
Qv
=M觶 iq觶 i+
1 2
坠 坠qi
觶qiTM觶 iq觶 i 觶
ii i
Q =Qe +Qv 代入方程(7)得:
32刚柔耦合多体模型的动态仿真如上文所述拱架式贴片机的贴装过程是不断往复的点对xy平面内的快速移动横梁的特性以及内部应力应变都dt是随着贴装头移动位置的变化而时刻变化的在仿真实验时必须要考虑这些变化对贴片机系统动态特性的影响单一地研究某个广义力包括单元弹性变形和外加载荷引起的广义力
第6期
机械设计与制造
Miq觶 i+ξiqi+CiTi q
i
λ=Qe
i
+Qv
(9)
i
式中:Qv —速度二项式。将式(9)与系统的约束方程 C(q,t)=0 联
立,即构成了刚柔耦合系统的动力学方程。
3 刚柔耦合多体模型的动态仿真分析
3.1 刚柔耦合多体模型的建立
利用 SolidWorks、Adams 和 Ansys 软件,建立拱架式贴片机
来稿日期:2013-12-29 作者简介:姜 涛,(1987-),男,山东高密人,硕士研究生,主要研究方向:计算机集成制造系统;
唐火红,(1973-),男,安徽池州人,副教授,硕士生导师,主要研究方向:先进制造技术
32
姜 涛等:拱架式贴片机横梁刚柔耦合动态仿真优化设计
第6期
求解。因此,基于刚柔耦合建模的多体动态分析对于现代大型复 杂机械系统的设计更有应用价值和意义[7-10]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考文献:
[1] 肖永山,宋福民,刘少军. 全自动贴片机横梁设计与动力 学仿真[J]. 计算机辅助工程, 2006 年增刊:340-343.
构,见表 1 所示,这些结构适用于不同的工作场合。
x-y 运动机构包括 x 横梁(采用铝 合金 6061 材料)、x 向驱动部分与 y 向 驱动部分,是整个贴片机的主要运动 部件(如图 2)。
表 1 滚珠丝杠+直线导轨传动结构的分类与特点
序号 名称
简图
特点
1 丝杠外侧单驱
扭摆值大,丝杠受力大。 刚度值较低。
2 丝杠内侧单驱
扭摆值较大,丝杠受力较大。 刚度值低。
3 丝杠上面单驱
扭摆值,丝杠受力值界于 1 和 2 中间。刚度值较低。
4 丝杠内侧双驱
扭摆值小,丝杠受力小。 刚度值较高。
5 丝杠外侧双驱
扭摆值较小,丝杠受力较小。 刚度值高。
6 丝杠上面双驱
扭摆值,丝杠受力值界于 3 和 4 中间。刚度值较高。
[2] 宋福民,张小丽. 全视觉贴片机研制解析[J]. 电子工业 专用设备, 2003(4):79-84.
[3] 胡以静,胡跃明,吴忻生. 高速高精度贴片机的贴装效率 优化方法[J]. 电子工艺技术, 2006,27(4): 191-196.
·新设备与新机构·
电 子 工 业 专 用 设备
Equipment for Electr onic Pr oducts Manufactur ing
EPE
较大,但其对贴装精度的影响不在敏感方向(y 向) 上;单侧驱动时,该力偶也较大,且其对贴装精度的 影响在敏感方向(y 向)上。
由于横梁等关键零部件的结构相当复杂,仅仅 依靠传统的经验设计和静力校核的方法是无法获 得良好的动态品质。必须依靠数值模拟进行动态设 计分析,才能设计出满足要求的贴片机结构。
表 2 结构优化前后固有频率
Hz
阶次
结构
1阶 2阶 3阶 4阶 5阶
原始结构 250 419 435 553 735 优化结构 436 555 925 997 1327
图 13 横 梁 优 化 结 构 第 3 阶 振 型(925 Hz) 图 14 横 梁 优 化 结 构 第 4 阶 振 型(997 Hz)
接方式。在此基础上, 对横梁结构进行数值仿真分析与优化, 从而达到了降低横梁质量、提高刚度
的设计目的。
关键词: 贴片机; 结构形式; 静力校核; 模态分析
中图分类号: TP319.9
文献标识码: A
文章编号: 1004-4507(2007)09-0012-04
Design Resear ch on x- y Moving Beam of Placement Equipment
EPE 电 子 工 业 专 用 设备 Equipment for Electr onic Pr oducts Manufactur ing
·新设备与新机构·
化横梁进行静力校核与模态分析,静力变形如图 10 所示,振型如图 11~图 15 所示,固有频率见表 2。 横梁结构优化后,其变形由 9.3μm减少为9.0μm。横 梁结构由立式结构变成卧式结构,提高了固频,改 善了振型。
横梁的受力状况可简化为受时变负荷作用下 的简支梁。具体有 z 向的重力和约束反力、y 向的惯 性力和驱动力、x 向的惯性力和约束反力等。由于 横梁驱动方式的不同,y 向的惯性力和驱动力形成 的力偶的大小也相差很大。双侧驱动时,该力偶最 小,其对贴装精度的影响最小;中间驱动时,该力偶
Sep. 2007 (总第 152 期) 13
(a) 优化前结构 (b) 优化后结构 图 9 横梁优化前后结构对比 图 10 横 梁 优 化 结 构 变 形 图
图 11 横 梁 优 化 结 构 第 1 阶 振 型(436 Hz)
图 12 横 梁 优 化 结 构 第 2 阶 振 型(555 Hz)
图 15 横 梁 优 化 结 构 第 5 阶 振 型(1327 Hz)
图 1 框架式贴片机
x y
图 2 贴 片 机 x-y 运 动 机 构
从表 1 中可以看出:当横梁跨距值较小,精度、 速度要求较低时,可以采用单侧驱动方式;当横梁 跨距值较大,精度、速度要求较高时,最好选用双侧 驱动,单驱横梁的扭摆值会较大。为达到贴片机高 速、高精的性能,再综合考虑加工、装配等因素,选 择第 4 种结构,作为设计的目标结构。
摘 要: 高速、高精度是贴片机的主要特征。在框架式贴片机中, 横梁的质量与刚度是决定整机速
度 和 精 度 的 主 要 因 素 。 横 梁 的 结 构 形 式 、与 传 动 机 构 的 连 接 方 式 、材 料 等 都 直 接 影 响 横 梁 的 质 量
与刚度值。通过综合分析传动机构与横梁不同连接方式的利弊, 从中选择能够满足设计要求的连
图 7 横 梁 原 始 结 构 4 阶 振 型 ( 553 Hz)
图 8 横 梁 原 始 结 构 5 阶 振 型 ( 735 Hz)
4 横梁的结构优化设计
基于横梁原始结构,考虑横梁的实际受力情 况,通过优化计算,可以得到满足约束条件和设计 目标的结构参数最优解。
图 3 横梁原始结构变形图 图 4 横 梁 原 始 结 构 1 阶 振 型 ( 250 Hz)
动态设计问题包含激励、结构与响应三要素。 激励和结构决定了结构振动的振幅和固有频率,改 变激振或改变结构的动态特性,都将改变系统振动 特性。因此,可以通过 2 种方式控制振动:控制结构 的固有频率,避开外加激励的主要频带,将振动控 制在允许的范围;减小激励(降低电机功率、降低 转速等),实现系统动态性能匹配,降低振动水平, 将振动响应控制在允许的范围。
Abstr act: High speed and high precision are the principal characters of the placement machine. In the frame placement machine, the mass and stiffness of the beam are the major factors that impact the speed and precision of the whole machine. The structure form of the beam, and the connection way to the transmission-mechanism and the material affect the mass and stiffness of the beam all directly. The advantages and disadvantages of the connection way of the transmission-mechanism and the beam are analyzed, and the connection way being able to satisfy the design demand is chosen. Lastly, the beam structure is analyzed and optimized by simulation so that the beam mass is reduced and the stiffness is improved. Keywor d: Placement Machine; Structure; Static Analysis; Modal Analysis
5 结论
(1)速度、精度是评价贴片机性能高低的 2 个 主要因素。横梁的结构与传动连接方式直接影响横 梁的质量与动态刚度,通过综合分析各种传动机构 与横梁的连接形式,才能满足整机的设计要求。
(2) 为使结构的静、动态特性能够保证机器速 度与精度的提高,需要在设计初期,将横梁的设计 与静力校核、模态分析工作交互进行。
·新设备与新机构·
电 子 工 业 专 用 设备
Equipment for Electr onic Pr oducts Manufactur ing
EPE
贴片机 x-y 运动横梁结构设计研究
宋福民 1, 肖永山 2
(1.广州羊城科技实业有限公司, 广州 510520; 2.中南大学机电工程学院, 长沙 410083)
构形式的贴片机的基本原理是当一个贴装头在吸 小,可以采用标准的结构,即:两侧导轨中间丝杠的
取元件时,另外一个贴装头去贴装元件。
结构。这种结构受力均匀,结构刚度高。y 向导轨跨
框架式贴片机目前已经成为市场主流,是真正 距大,丝杠又不能放在中间,因此会有多项组合的结
意义上的泛用机(chip+IC 元件)。
4.1 结构优化方法 进行优化设计首先要用数学表达式描述实际
的设计问题,即转化为数学模型,然后根据数学模 型的特性,选择适当的算法及优化分析程序,利用 计算机求得最优化解。利用有限元分析软件进行结 构优化分析,关键是确定设计变量、约束条件和目 标函数这三个优化设计的基本要素。因此优化设计 模型可描述如下:
架型结构就出现了动臂式、垂直旋转式、平行旋转 的,都需要导轨做导向,只是在传动与驱动的方式
式 3 种结构形式。
存在差异。选择滚珠丝杠 + 直线导轨传动的伺服电
框架式贴片机还可以采用增加横梁(也是增加 机驱动方式是因为同其它 2 种方式相比具有结构
贴装头)的方式达到增加贴装速度的目的。这种结 刚度高,成本适中的特点。由于横梁 x 向导轨跨距值
1 引言
的,它通过移动安装于 x-y 运动框架中的贴装头
(一般是装在 x 轴横梁上),进行吸片和贴片动作
框 架 式 贴 片 机 的 送 料 器 和 PCB 是 固 定 不 动 (如图 1)。此结构的贴装精度取决于定位轴 x-y 和