贴片机结构(硬件知识)
半导体贴片机的结构原理
半导体贴片机的结构原理
半导体贴片机是一种用于将半导体元器件(如集成电路、二极管、三极管等)贴附到电路板上的自动化设备。
其结构原理包括以下几个部分:
1. 输送系统:半导体元件通常以卷带的形式供应,输送系统主要用于将卷带中的元件分离并传送到贴片区域。
输送系统通常由供料轮、分离轮、传送带等组成。
2. 传感系统:传感系统用于检测贴片区域是否有无元件、元件位置是否准确等信息。
传感系统通常采用光电传感器、激光传感器等。
3. 位置校准系统:位置校准系统用于确保贴附到电路板上的元件位置准确。
位置校准系统通常包括视觉定位系统和机械定位系统。
视觉定位系统通过摄像头或激光扫描仪等设备来检测电路板上的参考点,然后通过图像处理算法来确定元件的准确位置。
机械定位系统则通过精密的导轨和定位装置来确保元件的精准贴附。
4. 贴附系统:贴附系统用于将元件粘附到电路板上。
通常使用真空吸盘来吸起元件,然后通过运动轨迹控制将元件准确贴附到电路板上,并使用热风或红外线加热等方式将元件与电路板焊接。
5. 控制系统:控制系统用于控制整个贴片机的运行。
通常采用微控制器或PLC 等控制器来完成元件供料、位置校准、贴附等动作的控制,并与操作面板、传感器等进行连接。
综上所述,半导体贴片机的结构原理是通过输送系统将元件供应到贴片区域,通过传感系统检测元件信息,通过视觉定位和机械定位系统确定元件位置,然后通过贴附系统将元件粘附到电路板上,并通过控制系统进行整个贴片过程的控制。
贴片机相关知识介绍

贴片机相关知识介绍贴片机理论知识贴片机:又称“贴装机”、“表面贴装系统”(Surface Mount System),在生产线中,它配置在点胶机或丝网印刷机之后,是通过移动贴装头把表面贴装元器件准确地放置PCB焊盘上的一种设备。
分为手动和全自动两种。
全自动贴片机是用来实现高速、高精度地全自动地贴放元器件的设备,是整个SMT生产中最关键、最复杂的设备。
贴片机是SMT的生产线中的主要设备,现在,贴片机已从早期的低速机械贴片机发展为高速光学对中贴片机,并向多功能、柔性连接模块化发展。
贴片机的原理拱架型贴片机(Gantry)元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。
由于贴片头是安装于拱架型的X/Y 坐标移动横梁上,所以得名。
拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。
2)、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。
3)、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它牺牲。
这种形式由于贴片头来回移动的距离长,所以速度受到限制。
现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。
但是实际应用中,同时取料的条件较难达到,而且不同类型的元件需要换用不同的真空吸料嘴,换吸料嘴有时间上的延误。
这类机型的优势在于:系统结构简单,可实现高精度,适于各种大小、形状的元件,甚至异型元件,送料器有带状、管状、托盘形式。
第四讲 贴片机认知
拱架式贴片机
转塔式贴片机
转塔式贴片机是使用一组移动送料器,转塔从料站吸 取元件,然后把元件贴放在位于移动工作台上的电路板上面。 由于拾取元件和贴片动作同时进行,贴片速度大幅度提高。
转塔式贴片机
转塔式贴片机优化各贴片头运行、等待、元件检查等动作 时间,充分发挥多头贴装效率。
转塔式贴片机
贴装过程贴片机精度-光学系统源自基板精度贴片头定位精度
基板定位精度
总贴片精度
元件定位精度
贴片机基本组成结构
目前,贴片机品牌繁多、结构形式多样, 型号规格不一,具体结构存在一定差异,但 组成结构基本相同。
基本组成结构:机架(设备本体)、电路 板传送机构与定位装置、贴片头及其运动控制 系统、视觉定位系统、电力伺服系统、气动系 统等。
【同时在线式贴片机】具有多种贴片头,依次 同时对同一块PCB的不同位置进行贴片。
印刷机的分类-贴片方式
多头贴装
贴片机的分类-结构形式
按结构形式大致可分为四种类型:过顶动臂拱架型、 转塔式贴片机、复合式贴片机、大型平行系统贴片机等。
拱架式
拱架式贴片机有较好的灵活性和精度,适用于大部分 元件,高精度机器一般都是这种类型,但其速度无法与复 合式、转塔式和大型平行系统相比:单臂或多臂
贴片基本工作过程
自动贴片机相当 于自动化机械手, 按事先编好的程 序把元器件取出 并贴放到PCB相应 位置上。
常见贴片机分类
贴片机按贴装速度分类? 贴片机按结构形式分类? 贴片机按贴片形式分类? 贴片机按自动化程度分类?
贴片机选型要综合考虑设备贴装速度、自 动化程度和贴装精度等
常见贴片机分类-贴片速度
【半自动贴片机】-上下板、元器件供料、定位等均由人工 完成,设备仅完成吸料和贴片动作的贴片机—研发机构
贴片机结构图
贴装头 供料器
贴片头是贴片机的关键部件,他拾起原件后能在校正系统的控
制下自动校正位置,并将元件准确的贴在指定的位置。贴装头
的发展是贴片机进步的标志;
供料器(FEEDER)的作用是将片式元件SMD/SMC按照一定的规律和顺序
提供给贴片以便准确方便的拾取,它在贴片中占有较多的数量和位置,
它也是选择贴片机和安排贴片工艺的重要组成部分。根据SMD/SMC的包装
贴片机结构图
机架
PCB传送机构及支撑台
X Y Z 伺服
定位系统
光学识别系统
贴片头
供料器
传感器
计算机操作软件
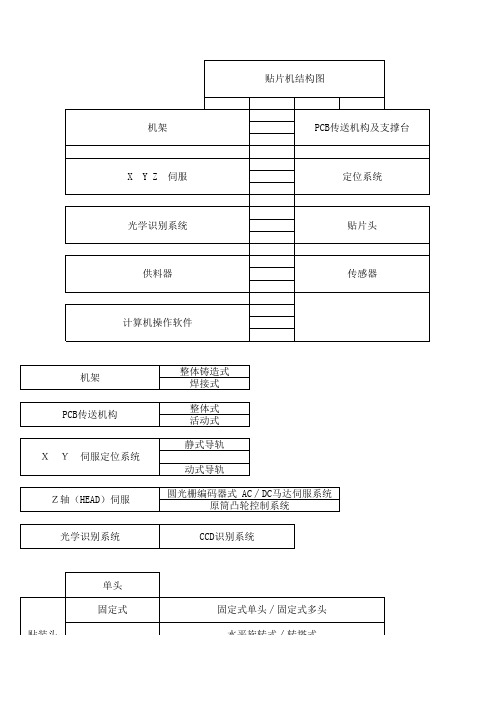
机架 PCB传送机构 X Y 伺服定位系统 Z轴(HEAD)伺服 光学识别系统
整体铸造式 焊接式
整体式 活动式
静式导轨
动式导轨
圆光栅编码器式 AC∕DC马达伺服系统 原筒凸轮控制系统
CCD识别系统
位以致飞片现象。
贴片头压力传感器
是通过霍尔压力传感器及伺服电机的负载性来实现 的。当元件放置到PCB上的瞬间回受到震动,其震 动力能及时传送到控制系统,通过控制系统的调控 再反馈到贴装头上,从而实现Z轴软着陆功能。有 该功能的贴片头在工作时,给人的感觉是平稳轻 巧,若进一步观察,则元件两端浸在焊膏中的深度 大体相同,不带压力传感器的贴片头,则会出现错
机架
机架是机器的基础是所有的传动、定位、传送机构均固定在上 面。大部分型号的贴片机及其各种送料器安装在上面。因此机
架应有足够的机械强度和刚性。
传送机构 传送机构的作用是将需要贴片的PCB送到预定位置,
贴装完成后再将SMA送至另一道工序
X Y定位 系统及支
撑台
1.支撑贴片头,贴片头安装在X导轨上,X导轨沿Y方向运动从 而实现XY方向贴片的全过程2.是支撑PCB承载平台并实现 PCB在XY方向运动,这类结构常见与塔式旋转头类的贴片机中
贴片机的技术和原理
贴片机的技术和原理贴片机是一种用于电子产品生产中的自动化设备,其主要功能是将电子元器件精确地贴装在电路板上。
贴片机的技术和原理涉及到多个方面,包括机械结构、图像处理、自动控制等。
一、机械结构贴片机的机械结构是实现元器件精确贴装的基础。
通常,贴片机由进料装置、传送装置、贴装头、图像识别系统和控制系统等组成。
1. 进料装置:进料装置用于将元器件从供料器中取出并送入传送装置。
常见的进料装置有震盘供料器和带轮供料器等。
2. 传送装置:传送装置用于将元器件从进料装置运送到贴装头的位置。
传送装置通常采用传送带或者线性导轨等方式。
3. 贴装头:贴装头是贴片机的核心部件,负责将元器件精确地贴装在电路板上。
贴装头通常包括吸嘴、吸嘴更换装置和吸嘴控制装置等。
4. 图像识别系统:图像识别系统用于对电路板上的位置标记或图案进行识别,以确定元器件的贴装位置。
常见的图像识别技术包括CCD摄像头和光源等。
5. 控制系统:控制系统是贴片机的核心,用于控制整个贴装过程。
控制系统通常包括运动控制、图像处理和数据处理等模块。
二、图像处理贴片机的图像处理技术主要用于元器件的识别和定位。
在贴装过程中,贴片机通过拍摄电路板上的位置标记或图案,利用图像处理算法来识别元器件的贴装位置。
1. 图像采集:贴片机通过CCD摄像头对电路板进行图像采集。
采集到的图像包含了电路板上的位置标记和图案等信息。
2. 图像预处理:图像预处理是对采集到的图像进行预处理,以提高后续图像处理的准确性和效率。
常见的图像预处理技术包括灰度化、二值化、滤波和边缘检测等。
3. 特征提取:特征提取是图像处理的关键步骤,通过对图像进行特征提取,可以确定元器件的贴装位置。
常见的特征提取技术包括边缘检测、角点检测和模板匹配等。
4. 定位算法:定位算法是根据特征提取的结果,对元器件的贴装位置进行计算。
常见的定位算法包括模板匹配算法、最小二乘法和神经网络等。
三、自动控制贴片机的自动控制技术用于实现贴装过程的自动化。
项目二 贴片机的基础知识

项目二贴片机的基础知识知识目标1、了解贴片机的结构类型及其特点2、熟悉贴片机的工作环节3、熟悉贴片机结构参数设置技能目标1、掌握贴片机开机流程2、熟悉贴片机工作界面3、了解贴片机基本结构任务一贴片机认识基础知识贴片机是计算机控制的自动化生产设备,它能用一定的方式将片式组件准确地放到PCB制定的焊盘上。
一、贴片机结构类型目前贴片机大致可分为四种类型:动臂式、复合式、转盘式和大型平行系统。
不同种类的贴片机各有优劣,通常取决于应用或工艺对系统的要求,在其速度和精度之间也存在一定的平衡。
1、动臂式机器具有较好的灵活性和精度,适用于大部分元件,高精度机器一般都是这种类型,但其速度无法与复合式、转盘式和大型平行系统相比。
不过元件排列越来越集中在有源部件上,比如有引线的QFP和BGA阵列元件,安装精度对高产量有至关重要的作用。
复合式、转盘式和大型平行系统一般不适用于这种类型的元件安装。
动臂式机器分为单臂式和多臂式,单臂式是最早先发展起来的现在仍然使用的多功能贴片机。
在单臂式基础上发展起来的多臂式贴片机可将工作效率成倍提高,如YAMAHA公司的YV112就含有两个带有12个吸嘴的动臂安装头,可同时对两块电路板进行安装。
2、复合式机器是从动臂式机器发展而来,它集合了转盘式和动臂式的特点,在动臂上安装有转盘,像Simens的Siplace80S系列贴片机,有两个带有12个吸嘴的转盘。
由于复合式机器可通过增加动臂数量来提高速度,具有较大灵活性,因此它的发展前景被看好,如Simens最新推出的HS50机器就安装有4个这样的旋转头,贴装速度可达每小时5万片。
3、转盘式机器由于拾取元件和贴片动作同时进行,使得贴片速度大幅度提高,这种结构的高速贴片机在我国的应用最为普遍,不但速度较高,而且性能非常的稳定,如松下公司的MSH3机器贴装速度可达到0.075秒/片。
但是这种机器由于机械结构所限,其贴装速度已达到一个极限值,不可能再大幅度提高。
雅马哈贴片机工作原理

雅马哈贴片机工作原理雅马哈贴片机是一种常见的电子设备,其工作原理涉及到多个方面。
本文将从贴片机的结构、工作流程和关键技术等方面详细介绍雅马哈贴片机的工作原理。
一、贴片机的结构雅马哈贴片机主要由进料系统、定位系统、贴片系统、检测系统和控制系统等组成。
进料系统用于将元件从料盘中输送至贴片区域,定位系统用于确定元件的位置,贴片系统负责将元件粘贴在PCB板上,检测系统用于检测贴片质量,控制系统则整体控制贴片机的运行。
二、贴片机的工作流程1. 进料系统将元件从料盘中输送至贴片区域,通常采用振动盘和真空吸嘴的方式,确保元件的连续供料。
2. 定位系统通过图像识别等技术,确定元件在PCB板上的位置,保证贴片的准确性和精度。
3. 贴片系统将定位好的元件粘贴在PCB板上,通常采用贴片头和压力控制系统,将元件粘贴到预定位置,并确保与焊盘之间的间距合适。
4. 检测系统对贴片质量进行检测,如检测元件的位置偏移、翻转等情况,确保贴片的质量和可靠性。
5. 控制系统对整个贴片机进行控制和调度,协调各个子系统的工作,确保贴片机的稳定运行和高效生产。
三、贴片机的关键技术1. 图像识别技术:贴片机通过摄像头对PCB板和元件进行实时拍摄和图像识别,以获取元件位置的信息,实现高精度的贴片定位。
2. 自动送料技术:进料系统采用振动盘和真空吸嘴等技术,实现元件的连续供料和自动送料,提高生产效率。
3. 粘贴技术:贴片系统采用贴片头和压力控制系统,将元件粘贴在PCB板上,确保粘贴的准确性和稳定性。
4. 检测技术:检测系统通过图像分析和传感器检测等技术,对贴片质量进行实时监测,确保贴片的可靠性和一致性。
5. 控制技术:控制系统采用先进的控制算法和控制器,对贴片机的运行进行全面控制和调度,提高生产效率和贴片质量。
雅马哈贴片机是一种用于电子设备生产的重要设备,其工作原理涉及到进料、定位、贴片、检测和控制等多个方面。
通过合理的结构设计和关键技术的应用,雅马哈贴片机能够实现高精度、高效率的贴片操作,满足电子设备生产的需求。
贴片机的结构分类
目前贴片机结构大致可分为四种结构:拱架式贴片机、复合式贴片机、转塔式贴片机和大型平行系统贴片机。
(1)拱架式贴片机。
拱架式(又称动臂式)机器是最传统的贴片机,具有较好的灵活性和精度,适用于大部分元件,高精度机器一般都是这种类型,但其速度无法与复合式、转塔式和大型平行系统相比。
不过元件排列越来越集中在有源部件上,比如有引线的QFP(Quad flat package,四边扁平封装器件)和BGA(Ball grid array,球栅阵列器件),安装精度对高产量有至关重要的作用。
复合式、转塔式和大型平行系统一般不适用于这种类型的元件安装。
拱架式机器分为单臂式和多臂式,单臂式是最早先发展起来的现在仍然使用的多功能贴片机。
在单臂式基础上发展起来的多臂式贴片机可将工作效率成倍提高,如美国Universal公司的GSM2贴片机就有2个动臂安装头,可分别交替对两块PCB(Print Circuit Board,印刷线路板)同时进行安装。
绝大多数贴片机厂商均推出了采用这一结构的高精度贴片机和中速贴片机,例如美国Universal公司的AC72、荷兰Assembleon公司的AQ-1、日本Hitachi公司的TIM-X、日本Fuji 公司的QP-341E和XP系列、日本Panasonic公司的BM221、韩国Samsung公司的CP60系列、日本Yamaha公司的YV系列、日本Juki 公司的KE系列(2)复合式贴片机。
复合式机器是从拱架式机器发展而来,它集合了转塔式和拱架式的特点,在动臂上安装有转盘,像Siemens 的Siplace80S25贴片机,有两个带有12个吸嘴的旋转头。
Universal 公司也推出了带有30个吸嘴的旋转头,称之为“闪电头”,两个这样的旋转头安装在Genesis贴片平台上,可实现每小时60,000片贴片速度。
从严格意义上来说,复合式机器仍属于动臂式结构。
由于复合式机器可通过增加动臂数量来提高速度,具有较大灵活性,因此它的发展前景被看好,例如Siemens推出的HS60机器就安装有4个旋转头,贴装速度高达每小时60,000片。
贴片机的组成介绍
贴片机的组成介绍
贴片机又称贴装机、表面贴装系统,贴片机分为手动和全自动两种。
在生产线中,它配置在点胶机或丝网印刷机之后,是通过移动贴装头把表面贴装元器件准确地放置PCB焊盘上的一种设备。
从根本上说,贴片机由软、硬件两部分组成。
贴片机硬件部分由机械机构,其中包括机械主体、传动与驱动机构、气动真空系统以及其他机械机构;光学系统,其中包括视觉系统、光源及控制等;电子电路与计算机,其中包括传感器电路、图像处理、各种电子控制电路及工业计算机系统等3个主要部分。
贴片机软件部分由操作系统软件、机器控制软件及系统管理软件3个部分。
贴片机的结构范文
贴片机的结构范文贴片机是一种自动化设备,用于在电子电路板上安装(贴片)各种电子元件,如电阻器、电容器、集成电路等。
它的结构主要包括五个部分:供料系统、运输系统、视觉系统、贴装系统和控制系统。
供料系统是贴片机的重要组成部分,用于提供元件的供料。
供料系统通常包括多个不同的供料器,每个供料器安装在一个供料架上,供料架移动到装配头下方,将元件放置在待安装位置。
供料器根据元件的特性和贴装位置的需要,可以采用不同的供料方式,如震盘式供料、真空吸料等。
运输系统用于将电子元件从供料器上运送到装配位置。
它通常包括输送带、传送链或者直线传动器,这些部件具有较高的精度和速度,可以将元件在安装位置停留的时间控制在几十毫秒以内。
运输系统的稳定性和准确性对贴片机的性能具有重要影响。
视觉系统是贴片机的核心部分,用于对待贴装位置进行定位和校正。
视觉系统使用一种或多种摄像机和光源,通过拍摄图像然后进行图像处理,可以检测和识别元件的位置、尺寸和形状。
视觉系统的精度越高,贴装的准确性越高。
贴装系统是将电子元件从供料器上抓取下来,然后精确地放置在待安装位置的过程。
贴装系统通常由装配头、气动手臂和控制装置组成。
装配头具有抓取工具,可以根据元件的特性和尺寸选择合适的工具进行抓取和放置。
气动手臂用于控制工具的位置和姿态,精确地完成元件的抓取和放置。
控制装置用于实时监控装配过程,根据视觉系统提供的信息调整装配参数,以保证贴片的准确性和速度。
控制系统是贴片机的中枢神经系统,用于控制和监视贴装过程。
它可以根据预先设定的元件位置和安装顺序,实时控制供料器、运输系统、视觉系统和贴装系统的运动和操作。
控制系统通常使用计算机和相应的软件,以实现贴片机的高效、稳定和可编程控制。
总体来说,贴片机的结构是一个复杂的自动化系统,包括供料系统、运输系统、视觉系统、贴装系统和控制系统。
这些部分相互协调工作,以实现高效、准确、稳定的贴片过程。
贴片机的性能受到每个部分的精度、速度和稳定性的影响,因此不断的技术创新和改进对于提高贴片机的性能至关重要。
CP742 贴片机机构图解
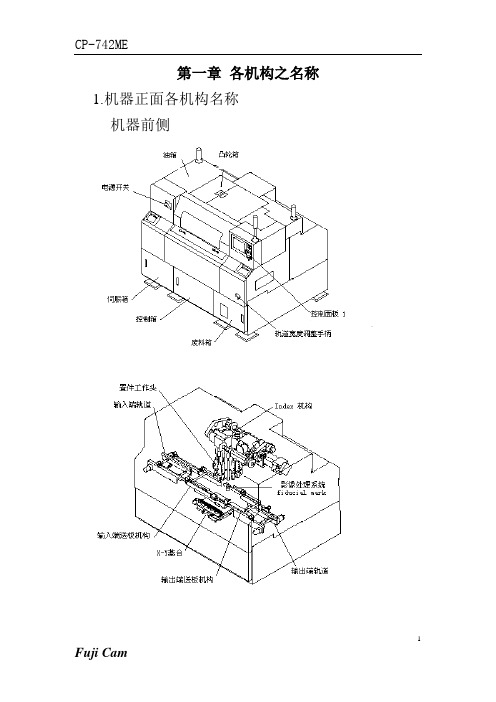
第一章各机构之名称1.机器正面各机构名称机器前侧机器后侧伺服控制轴各工作站置件头PCU( Pallet change unit)2.机器各机构功能说明置件相关机构凸轮箱主驱动装置置件工作头1~16工作头影像处理系统供料系统料枪CP7 切刀机构供料台PCU基板传输系统XY基台电气控制系统控制面板控制箱气路控制系统机器本体置件相关机构凸轮箱凸轮箱是由凸轮轴马达,主驱动装置,凸轮轴,驱动连杆,气压缸等机构组成。
主驱动装置凸轮箱中主驱动装置是由2部分组成,一个带动置件工作头上的角度驱动离合器,用来驱动齿轮盘动作,一个是带动吸嘴头动作的装置。
置件工作头旋转主轴上有16组工作头,每一组置件工作头是由吸嘴,吸嘴头及吸嘴头支座组成。
每一工作头上均可配有6种不同的吸嘴。
可依零件之大小做不同的选择。
置件工作头从料枪上吸取零件,通过影像处理系统,而后将零件置在生产基板上。
1~16工作站16个置件工作头所在位置称为工作站,各工作站所执行工作均不同,以下将针对各工作站逐一进行说明。
第一站执行供料器送料,吸取零件及零件用尽检知等。
第二站进行大零件取件成败检知,及角度预转。
角度预转为减少第八站将零件转到最终角度时间,同时减少旋转惯性引起的角度误差,进行±90度预转。
第三站执行置件工作头误差角度修正。
第五站使用大,小视野两相机进行零件位置、角度偏差、零件外行,有无零件等检知。
第六站测量吸嘴头所吸零件厚度(可选)第八站执行最终置件角度旋转。
根据第五站影像处理结果在第八站用伺服马达进行最终角度旋转。
第九站执行将零件置放在生产基板上,但在第五站影像处理不良零件将不做置件。
第十站执行角度旋转还原,同时进行吸嘴原始位置检知第十一站确认置件头下降后是否升起,及为了计算生产情报执行置件工作头A检知。
第十三站执行将第五站影像处理不良之零件从吸嘴头上清除。
同时执行吸嘴头切换前,吸嘴头上6个吸嘴所在位置检知。
第十四站使用伺服马达,执行吸嘴位置切换。
贴片机结构及原理分析课件
1
贴片机结构及原理分析课件
此外,现代的贴片机在传动结构(Y轴方向由单 丝械向双丝杠发展);元件的对中方式(由机械 向激光向全视觉发展);图像识别(采用高分辨 CCD);BGA和CSP的贴装(采用反射加直射 镜技术);采用铸铁机架以减少振动,提高精度, 减少磨损;以及增强计算机功能等方面都采用了 许多新技术,使操作更加简便、迅速、直观和易 掌握。
14
贴片机结构及原理分析课件
空间分辨率是指CCD分辨精度的能力,通常用像元素来 表示,即规定覆盖原始图像的栅网的大小,栅网越细, 网点和像元素越高,说明CCD的分辨精度越高。采用高 分辨率CCD的贴片机其贴装精度也较高。
但通常在分辨率高的场合下,CCD能见到的视野小 (Frame),而大视野的情况下则分辨率较低,故在高 速/高精度贴片机中装有两种不同视野的CCD。在处理高 分辨率的情况下采用小视野CCD,在处理大器件时则使 用大视野CCD。
15
贴片机结构及原理分析课件
4.CCD的光源
为了配合贴片机贴好BGA和CSP之类的新型器 件,在以往的元件照明(周围、同轴)基础上增 加了新型的BGA照明。所谓的BGA照明是LED 比以往更加水平,早期的照明装置能同时照亮焊 球与元件底部,故难以将它们区别开来,改进后 的照明系统,当LED点亮时,仅使BGA元件的 焊球发出反光,从而能够识别球删的排列,增加 可信度
3.CCD的分辨率
光学系统采用两种分辨率——灰度值分辨率和空间分 辨率。
灰度值分辨率是利用图像多级亮度来表示分辨率的方 法,机器能分辨给定点的测量光强度,所需光强度越小, 则灰度值分辨率就越高,一般采用256级灰度值,它具 有很强的精密区别目标特征的能力。而人眼处理的灰度 值仅在50~60左右,因此机器的处理能力远高于人眼的 处理能力。
(整理)贴片机基本结构介绍及操作使用
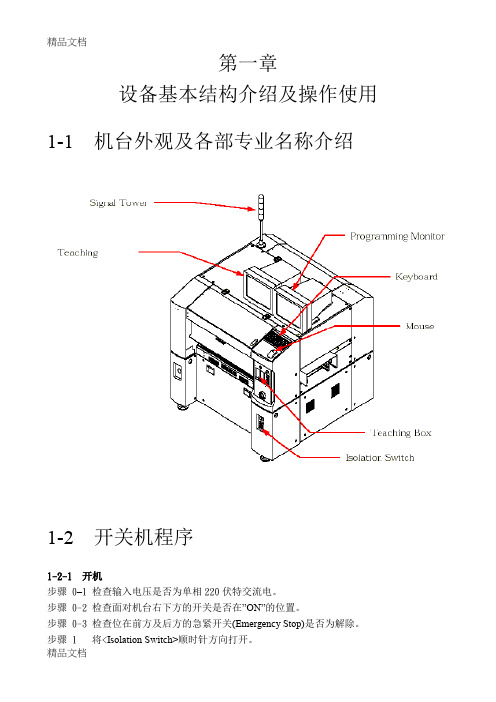
第一章设备基本结构介绍及操作使用1-1 机台外观及各部专业名称介绍1-2开关机程序1-2-1 开机步骤 0–1 检查输入电压是否为单相220伏特交流电。
步骤 0-2 检查面对机台右下方的开关是否在”ON”的位置。
步骤 0-3 检查位在前方及后方的急紧开关(Emergency Stop)是否为解除。
步骤 2 相隔5~10秒后,按下位在<Isolation Switch> 的Start(绿色按钮)。
(切记万好不要在打开<Isolation Switch>后,直接按下Start,以免伤及硬件。
步骤 3 进入主程序后,按下位在Operation Panel上的<Ready Switch>。
步骤 4 拿起Teaching Box,设定Mode = Home之后,按下<Home Start>( ▼向下的方键),此时,机台所有的轴(Axis X,Y,Z,R)会做归原点的动作。
步骤 5 暖机三到五分钟。
选择Mount→Warm-Up,按下选择”START”。
1-2-1 关机步骤 2 按下位在<Isolation Switch>的Stop(红色按钮),即可以移除马达电源。
步骤 3 待计算机所有的程序皆关闭结束后,将<Isolation Switch>逆时针关闭即可。
1-3 操作面板各种功能的说明及使用1-3-1 操作面板上的按钮功能说明及使用◆<Isolation>switch其功能为提供或停止设备的主电源,以转动开关来提供电源,电源指示灯会亮,且在一会儿,工作画面会出现在”Programming Monitor”。
在关机期间,供应Driver的电源是关闭的,例如马达。
只有在结束MMI主程序才需要关闭电源,如果突然关闭电源,数据及主机可能会受损,且在下次开机时,设备可能会发生故障。
◆<Main start>switch要供应电源至电力系统,例如马达,按下<main start>switch的绿色按钮来提供电源。
SMT贴片机简介
一、贴片机基本结构:贴片机是机-电-光以及计算机控制技术的综合体。
它通过吸取-位移-定位-放置等功能,实现了将SMD元件快速而准确地贴装到PCB板所指定的焊盘位置。
贴片机虽然品种繁多,但其基本构成如下:(一)贴装头从电装机器人的概念来说,贴装头就是一只智能的机械手,它能按要求拾取元件,精确地贴放到预置的焊盘上。
a. 元件拾放拾取元件一般是采用真空负压的吸嘴吸住元件,它结构简单便于维护,近年这种产生负压的微型真空发生器组件已经成为多家公司的系列产品,专供贴装头的设计者选用。
在拾放的动作中,吸嘴在做Z方向的移动时,既要拾放速度快,而且还要平稳。
早期的吸嘴Z方向移动是选用微型气缸完成的,在近十年的使用中发现气缸易磨损,寿命短,噪音大。
目前不少新机型都选用了新颖的机电一体化传动杆代替,使Z向运动状态都可以控制,大大提高Z方向运动综合性能。
b. 吸嘴当真空负压产生之后吸嘴是直接接触SMD元件的零件,吸嘴孔的大小与SMD元件的外形有每一台贴片机都有一套实用性很强吸嘴。
为了贴片机适应不同元件的贴装,所以还配有一个自动更换吸嘴的装置。
吸嘴与吸管之间还有一个弹性补偿的缓冲机构,保证在拾取过程对贴片元件的保护,提高元件的贴装率。
c. 气动电磁阀贴装头的微型气动电磁是贴装头上又一个重要组件,它管理着移动和拾放等功能,随贴片机的发展集成电磁阀组亦有了相当大的发展,有些单个电磁阀厚度仅为10-18毫米。
而且电磁铁驱动功率小,一般电路的驱动电平都可直接驱动,随着市场的不断发展,这些新颖的气动都能从市场上采购,给贴片机的设计开发提供有利条件。
d. 元件的定位贴片头的元件定位系统是贴片质量的一个重要环节,也是研究贴片技术难点之一,当被贴元件吸住元件之后,元件就处于不移稳定的悬浮状态。
早期的技术用机械爪进行被动定位,从而解决了早期贴片机的元件定位问题,但必竟是机械方式,机械制造中的各种误差,直接反映到元件定位的质量,特别是贴片速度提高时,机械的噪音,零件的磨损和精度的寿命等都限制了纯机械定位爪的进一步发展。
《贴片机认知》PPT课件
设备本体又称机架—支承部分、质量大、震动小 传送、定位机构—电动马达+传感器+皮带传送+气 动或电动 贴片头及运动控制—X、Y和Z向、滚珠丝杠+同步 齿形带 伺服定位 视觉系统—高精度相机照相,元件定位与对中 …… And so on
精选课件ppt
JUKI(东京重工) KE-2060R多功能贴片 机
精选课件ppt
VCS (Vision Centering System)单元
精选课件ppt
HMS-Hight Measure Syste m
附属配件,通常不是标配,编程时,吸取数据中有X, Y,Z 三个参数,用鼠标点击Z项后,按HMS就可以看到一个红点打 在器件上,测出Z(PICK HEIGHT)值,按确认键输入.
JUKI KE-2000系列后续机型,经济性、通用性、可靠性、 维护性和安全性进一步提高的逐片式新系列贴片机。
设备特征: 【贴片范围广】 【适应性强】 【操作简单元
精选课件ppt
ATC单元-自动工具更换
精选课件ppt
吸嘴单元-MNLA & FMLA
同时+顺序
精选课件ppt
机器前侧结构示意图
各组成部分的作用?
精选课件ppt
机器后侧结构示意图
各组成部分的作用?
精选课件ppt
开关类的使用方法
启动按钮 运转准备 紧急停止 控制电源开 双侧操作开/锁定 周期停止:暂停
精选课件ppt
精选课件ppt
主操作面板及设备启动
精选课件ppt
结束贴片
➢ 按命令按钮中的退出按钮。 ➢ 在系统结束前,显示装置的安全方向设定的确认信息。 ➢ 显示结束的确认信息,按下<确定>按钮。 ➢ 显示如下信息后,向左旋转主开关,切断电源。
高速贴片机结构与原理
2012-06-16 10:30高速贴片机结构与原理摘要:本文介绍安必昂科技推出的AX301/501模组式高速贴片机的基本结构,包括贴装模块、导轨传输及坐标定义等,并简单讲述本系列机型的安全回路和模块化控制电路的基本原理。
关键词:贴装模块元件激光检测吸嘴交换单元安全回路系统控制器AX301/501是由ASSEMBLEON公司推出的一款高速高精度的模组式贴片机。
本文介绍其结构和原理。
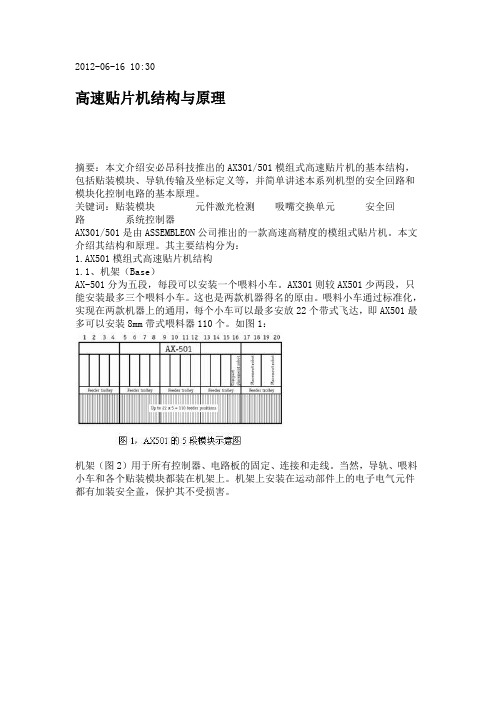
其主要结构分为:1.AX501模组式高速贴片机结构1.1、机架(Base)AX-501分为五段,每段可以安装一个喂料小车。
AX301则较AX501少两段,只能安装最多三个喂料小车。
这也是两款机器得名的原由。
喂料小车通过标准化,实现在两款机器上的通用,每个小车可以最多安放22个带式飞达,即AX501最多可以安装8mm带式喂料器110个。
如图1:机架(图2)用于所有控制器、电路板的固定、连接和走线。
当然,导轨、喂料小车和各个贴装模块都装在机架上。
机架上安装在运动部件上的电子电气元件都有加装安全盖,保护其不受损害。
1.2、贴装模块(Placement Robot)如图3,贴装模块分为标准贴装模块(AX STANDARD PLACEMENT ROBOT)和窄贴装模块(AX COMPACT PLACEMENT ROBOT)。
其中,宽模块宽度为20CM,是窄模块的二倍。
所以AX501最多可以安装最多10个标准模块或20个窄模块。
单个贴装模块有四个运动方向,即贴装头在X,Y方向的运动,以及西嘴在Z方向Rz方向的运动。
其中,Y方向移动通过每个贴装模块上自带的电机驱动,在丝杠上运动;X方向则使用了线性导轨磁悬浮技术。
所以每个贴装模块都有三个重要部件:1. 线性马达。
控制吸嘴升降、旋转并根据程序给定的力学值吸取贴装元件。
旋转由伺服直接控制,贴装头连接吸嘴的界面加装永磁力,真空和空气压力由气压控制气控制。
2. 检测相机(Board alignment camera)检测相机采用CCD作传感器,装在贴装头下表面。
市面上常见的贴片机结构

市面上常见的贴片机结构贴片机中使用的直线驱动结构,典型的有XY运动系统、板宽调节和贴片头的Z轴的结构,主要分为两种。
1采用旋转电动机滚珠丝杆加滑动导轨的结构典型结构如图1所示。
该结构的特点是通过滚珠丝杆加直线滑动导轨,将旋转电动机的旋转运动转化为直线运动,从而实现在XY平面或Z方向上点对点的位置控制。
构成该结构的要件还包括同步带/带轮或联轴器,由它将旋转电动机的扭矩传送到滚珠丝杆,从而推动滚珠丝杆的螺母(Nut与承载块通过螺钉固定,同时承载块通过螺钉固定在直线导轨的滑块上)直线滑动导轨的引导下,实现从旋转运动到直线运动的转换。
配合较好的这种系统的传送效率可达到95%以上,该结构在过去几十年被设备行业广泛采用,随着现代直线电动机技术的提高,并日趋成熟,发生了直线电动机加滑动导轨的结构。
图1采用旋转电动机滚珠丝杆加滑动导轨的结构图2采用该结构的环球仪器AC30实物图片。
图2环球仪器AC30实物图片2采用直线电动机加滑动导轨的结构如图3所示,这种结构采用旋转电动机构成的直线系统所用的器件要少,故障率低,而且基本上不需要维护,目前,新型贴片机中,该结构正逐步取代旋转电动机滚珠丝杆加滑动导轨的结构。
实物图片请参考环球仪器Genesi系列,如图3所示。
图3采用直线电动机加滑动导轨的结构图贴片机常用伺服控制系统贴片机常用控制系统结构主要包括下面两方面,这两方面主要实现的是点对点的位置控制。
(1)位置和速度反馈都来自伺服电动机本身这种控制方式的优点是对整个闭环伺服系统控制环路的要求较低,适用于对高速高精度位置控制要求较低的场合,如PCB传板机构,如图1所示。
因为位置反馈传感器被安装在电动机本体上,所以它不能非常准确而且实时地反映被驱动负载的精确位置,尤其是在要求系统要快速和高精度的情况下。
(2)位置和速度反馈来自执行机构(被驱动部件)位置和速度反馈来自负载的伺服控制系统,如图2所示。
这种控制方式对整个闭环伺服系统控制环路的要求很高,实用于高速,高重复定位精度的场合,如贴片机的X-Y运动系统及贴片头的Z轴和旋转轴等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
贴片机结构(硬件知识)06-10-2212:50发表于:《SMT技术交流》分类:未分类贴片技术与贴片机SMT生产中的贴片技术通常是指用一定的方式将片式元器件准确地贴放到PCB指定的位置,这个过程英文称之为“Pick and Place”,显然它是指吸取/拾取与放置两个动作。
在SMT 初期,由于片式元器件尺寸相对较大,人们用镊子等简单的工具就可以实现上述动作,至今尚有少数工厂仍采用或部分采用人工放置元件的方法。
但为了满足大生产的需要,特别是随着SMC/SMD的精细化,人们越来越重视采用自动化的机器--贴片机来实现高速高精度的贴放元器件。
近30年来,贴片机已由早期的低速度(1-1.5秒/片)和低精度(机械对中)发展到高速(0.08秒/片)和高精度(光学对中,贴片精度+-60um/4δ)。
高精度全自动贴片机是由计算机、光学、精密机械、滚珠丝杆、直线导轨、线性马达、谐波驱动器以及真空系统和各种传感器构成的机电一体化的高科技装备。
从某种意义上来说,贴片机技术已经成为SMT的支柱和深入发展的重要标志,贴片机是整个SMT生产中最关键、最复杂的设备,也是人们初次建立SMT生产线时最难选择的设备。
本章将着重讨论贴片机的主要结构,工作原理,各类贴片机的主要特点以及IPC最新推出的贴片机验收标准,为选购及组织验收贴片机提供依据。
9.1贴片机的结构与特性目前,世界上生产贴片机的厂家有几十家,贴片机的品种达几百个之多,但无论是全自动贴片机还是手动贴片机,无论是高速贴片机还是中低速贴片机,它的总体结构均有类似之处。
贴片机的结构可分为:机架,PCB传送机构及支撑台X,Y与Z/θ伺服,定位系统,光学识别系统,贴片头,供料器,传感器和计算机操作软件。
现将上述各种结构的特征及原理简介如下。
9.1.1机架机架是机器的基础,所有的传动、定位、传送机构均牢固地固定在它上面,大部分型号的贴片机及其各种送料器也安置在上面,因此机架应有足够的机械强度和刚性。
目前贴片机有各种形式的机架,大致可分为两类。
1.整体铸造式整体铸造的机架的特点是整体性强,刚性好,整个机架铸造后采用时效处理,机架的变形微小,工作时稳固。
高档机多采用此类结构。
2.钢板烧焊式这类机架由各种规格的钢板等烧焊而成,再经时效处理以减少应力变形.它的整体性比整体铸造低一点,但具有加工简单,成本较低的特点.在外观上(去掉机器外壳)可见到焊缝.机器采用那种结构的机架,取决于机器的整体设计和承重.通常机器在运行过程中应平稳,轻松,无震动感(用金属币立于机器上不会出现翻倒),从某种意义上来讲机架起着关键作用.9.1.2传送机构与支撑台传送机构的作用是将需要贴片的PCB送到预定位置,贴片完成后再将SMA送至下道工序。
传送机构是安放在轨道上的超薄型皮带传送系统。
通常皮带安置在轨道边缘,皮带分为A,B,C三段,并在B区传送部位设有PCB夹紧机构,在A,C区装有红外传感器,更先进的机器还带有条形码阅读器,它能识别PCB的进入和送出,记录PCB的数量。
传送机构根据贴片机的类型又分为两种。
(1)整体式导轨在这种方式贴片机中,PCB的进入、贴片、送出始终在导轨上,当PCB送到导轨上并前进到B区时,PCB会有一个后退动作并遇到后制限位块,于是PCB停止运行,与此同时,PCB下方带有定位销的顶块上行,将销钉顶入PCB的工艺孔中,并且B区上的压紧机构将PCB压紧。
在PCB的下方,有一块支撑台板,台板上有阵列式圆孔,当PCB进入B区后,可根据PCB 结构需要在台板上安装适当数量的支撑杆,随着台面的上移,支撑杆将PCB支撑在水平位,这样当贴片头工作时就不会将PCB下压而影响贴片精度。
若PCB事先没有预留工艺孔,则可以采用光学辨认系统确认PCB的位置,此时可以将定位块上的销钉拆除,当PCB到位后,由PCB前后限位块及夹紧机构共同完成PCB的定位。
通常光学定位的精度高于机械定位,但定位时间较长。
(2)活动式导在另一类高速贴片机中,B区导轨相对于A、C区是固定不变的,A、C区导轨却可以上下升降,当PCB由印刷机送到导轨A区时,A区导轨处于高位并与印刷机相接,当PCB运行到B区时,A区导轨下沉到与B区导轨同一水平面,PCB由A区移到B区,并由B区夹紧定位,当PCB贴片完成后送到C区导轨,C区导轨由低位(与B区同水平)上移到与下道工序的设备轨道同一水平,并将PCB由C区送到下道工序。
然而在最新的松下MSR型贴片机中,其A,C 区导轨为固定导轨,B区导轨则设计成可做X-Y移动的PCB承载台,并可做上下升降运动。
由此可见,不同机型的导轨有不同结构,其做法主要取决于贴片机的整体结构。
9.1.3X,Y与Z/θ伺服,定位系统1.功能X,Y定位系统是贴片机的关键机构,也是评估贴片机精度的主要指标,它包括X,Y传动结构和X,Y伺服系统。
它的功能有两种,一种是支撑贴片头,即贴片头安装在X导轨上,X 导轨沿Y方向运动从而实现在X-Y方向贴片的全过程,这类结构在通用型贴片机[泛用机]中多见,另一种功能是支撑PCB承载平台并实现PCB在X-Y方向移动,这类结构常见于塔式旋转头类的贴片机[转塔式]中。
这类高速机中,其贴片头仅做旋转运动,而依靠送料器的水平移动和PCB承载平面的运动完成贴片过程。
上述两种X,Y定位系统中,X导轨沿Y方向运动,从运动的形式来看,属于连动式结构,其特点是X导轨受Y导轨支撑,并沿Y轴运动,它属于动式导轨(Moving Rail)结构。
还有一类贴片机,贴片机的机头安装在X导轨上,并仅做X方向运动,而PCB承载台仅做Y方向运动,工作时两者配合完成贴片过程,其特点是X,Y导轨均与机座固定,它属于静式导轨(Statil Rail)结构。
从理论上讲,分离式结构的导轨在运动中的变形量要小于连动式,但在分离式的结构中,PCB处于运动状态,对贴装后的元器件是否产生位移,则应考虑。
2.结构X,Y传动机构主要有两大类,一类是滚珠丝杠--直线导轨,另一类是同步齿行带---直线导轨。
(1)滚珠丝杠--直线导轨典型的滚珠丝杠---直线导轨的结构,贴片头固定在滚珠螺母基座和对应的直线导轨上方的基座上,马达工作时,带动螺母做X方向往复运动,有导向的直线导轨支承,保证运动方向平行,X轴在两平行滚珠丝杠--直线导轨上做Y方向移动,从而实现了贴片头在X-Y方向正交平行移动。
同理,PCB承载平台也以同样的方法,实现X-Y方向正交平行移动。
贴片速度的提高,意味着X-Y传动结构速度的提高,这将会导致X-Y传动结构因运动过快而发热,通常钢材的线膨胀系数为0.000015,铝的线膨胀系数为钢的1.5倍,而滚珠丝杠[与马达连接]为主要热源,其热量的变化会影响贴装精度,故最新研制出的X-Y传动系统,在导轨内部设有[氮冷]冷却系统,以保证因热膨胀带来的误差,如果X-Y轴没有强制冷却,在轴的附近会有明确的变形。
此外,在高速机中采用无摩擦线性马达,和空气轴承导轨传动,运行速度能做的更快。
(2)同步带--直线轴承驱动典型的同步齿行带--直线导轨结构,同步齿行带由传动马达驱动小齿轮,使同步带在一定范围内作直线往复运动。
这样带动轴基座在直线轴承往复运动,两个方向传动部件组合在一起组成X-Y传动系统。
由于同步齿行带载荷能力相对较小,仅适用于支持贴片头运动,典型产品是德国西门子贴片机,如HS-50型贴片机,该系统运行噪声低,工作环境好。
3.X-Y伺服系统(定位控制系统)随着SMC/SMD尺寸的减小及精度的不断提高,对贴片机贴装精度的要求越来越高,换言之,对X-Y定位系统的要求越来越高。
而X-Y定位系统是由X-Y伺服系统来保证,即上述的滚珠丝杠--直线导轨及齿行带--直线导轨,是由交流伺服电机驱动,并在位移传感器及控制系统指挥下实现精确定位,因此位移传感器的精度起着关键作用。
目前,贴片机上使用的位移传感器有圆光栅编码器、磁栅尺和光栅尺,现将它们的结构与原理介绍如下。
(1)圆光栅编码器通常圆光栅编码器的转动部位上装有两片圆光栅,圆光栅是由玻璃片或透明塑料制成,并在片上镀有明暗相间的放射状铬线,相邻的明暗间距称为一个栅节,整个圆周总栅节数为编码器的线脉冲数。
铬线数的多少,也表示其精度的高低,显然,铬线数越多,其精度越高。
其中一片光栅固定在转动部位做指标光栅,另一片则随转动轴同步运动并用来记数,因此,指标光栅与转动光栅组成一对扫描系统,相当于记数传感器。
编码器在工作时,可以检测出转动件的位置、角度、及角加速度,它可以将这些物理量转换成电信号,传输给控制系统,控制系统就可以根据这些量来控制驱动装置,因此,圆光栅编码器通常装在伺服电机中,而电机直接与滚珠丝杆相连。
贴片机在工作时,将位移量转换为编码信号,输入编码器中,当电机工作时,编码器就能记录丝杆的旋转度数,并将信息反馈给比较器,直至符合被测线性位移量,这样就将旋转运动转换成了线性运动,保证贴片头运行到所需位置上。
采用圆光栅编码器的位移控制系统结构简单,抗干扰性强,测量精度取决于编码器中光栅盘上的光栅数及滚珠丝杠导轨的精度。
(2)磁栅尺磁栅尺由磁栅尺和磁头检测电路组成,利用电磁特性和录磁原理对位移进行测量。
磁栅尺是在非导磁性标尺基础上采用化学涂覆或电镀工艺沉积一层磁性膜(一般10-20微米),在磁性膜上录制代表一定长度具有一定波长的方波或正弦波磁轨迹信号。
磁头在磁栅尺上移动和读取磁信号,并转变成电信号输入到控制电路,最终控制AC伺服电机的运行。
通常磁栅尺直接安装在X,Y导轨上。
磁栅尺的优点是制造简单,安装方便,稳定性高,量程范围大,测量精度高达1-5微米。
一般高精度自动贴片机采用此装置。
帖片精度一般在0.02毫米。
(3)光栅尺该系统同磁栅尺系统类似,它也由光栅尺、光栅读数头与检测电路组成。
光栅尺是在透明玻璃或金属镜面上真空沉积镀膜,利用光刻技术制作密集条纹(每毫米100-300条纹),条纹平行且距离相等。
光栅读数头由指示光栅、光源、透镜及光敏器件组成。
指示光栅有相同密度的条纹,光栅尺是根据物理学的莫尔条纹形成原理进行位移测量,测量精度高,一般在0.1-1微米。
光栅尺在高精度贴片机中应用,其定位精度比磁栅尺还要高1-2个数量级。
西门子贴片机最早采用光栅尺---AC伺服电机系统。
但装有光栅尺的贴片机对环境要求比较高,特别是防尘,尘埃落在光尺上将会引起贴片机出故障。
总之,上述三种测量方法均能获得很高的定位精度,但仅能对单轴向运动位置的偏差进行检测,而对轨道的变形、弯曲等因素造成的正交或旋转误差却无能为力。
有最新的贴片机在X、Y导轨上安装冷却系统,可以有效的防止导轨的热变形。
4.Y轴方向运行的同步性由于支撑着贴片机头的X轴是安装在两根Y轴导轨上,为了保证运行的同步性,早期的贴片机采用齿轮、齿条和过桥装置将两Y导轨相连接。