传感器软件非线性校正方法综述
基于SVM的传感器非线性特性校正新方法(精)
基于SVM的传感器非线性特性校正新方法摘要:介绍了一种基于支持向量机的解决传感器系统非线性特性问题的新方法。
支持向量机是Vapnik教授提出的基于统计学习理论的新一代机器学习技术,它有效地解决了小样本学习问题,因此该方法对样本数量没有特殊的要求。
实验证明该方法有效,同时研究表明该方法也能用于其他系统的非线性校正。
关键词:非线性校正;神经网络;支持向量机;拟合方法;传感器0前言现代控制系统对传感器的准确度、稳定性和工作条件等方面提出了很高的要摘要:介绍了一种基于支持向量机的解决传感器系统非线性特性问题的新方法。
支持向量机是Vapnik教授提出的基于统计学习理论的新一代机器学习技术,它有效地解决了小样本学习问题,因此该方法对样本数量没有特殊的要求。
实验证明该方法有效,同时研究表明该方法也能用于其他系统的非线性校正。
关键词:非线性校正;神经网络;支持向量机;拟合方法;传感器0前言现代控制系统对传感器的准确度、稳定性和工作条件等方面提出了很高的要求。
然而,从严格意义上来说,目前绝大多数传感器特性都不理想,其输入输出特性大多为非线性关系。
为此,人们通过一些方法来进行非线性补偿和修正。
特别是近年来,随着神经网络的发展,有不少学者提出了基于神经网络进行非线性传感特性校正的方法。
这些方法一般是用一个多层的前馈神经网络去映射传感器特性曲线的反函数作为校正环节,算法相对简单,实现容易。
但是通过分析神经网络的基本工作原理,笔者认为该方法依然存在一些不足[1、6]:1)在训练过程中神经网络极容易陷入局部最小,而不能得到全局最小;2)神经网络过分依赖训练数据的质量和数量,但大多数情况下样本数据十分有限,由于噪声影响,存在数据不一致情况,对神经网络的训练结果影响较大;3)输入数据往往是高维的,而训练结果仅是输入空间的稀疏分布,所以大量的高维数据必然会大大增加算法的训练时间。
支持向量机SVM[4,5](Sup port Vector Machine)是基于统计学习理论的一种新的学习方法,最早由Vapnik教授及其合作者于上世纪90年代中期提出。
4.4非线性校正算法

x x0 x x1 p n ( x) y0 y1 a1 x a0 x0 x1 x0 x1
其中:
y1 y0 a1 , x0 x1
a0 y0 a1 x0
若(x0,y0)、(x1,y1),取在非线性特性曲线f(x) 或数组的两端点A、B,如下图中的直线表示插值方程, 这种线性插值就是最常用的直线方程校正法
(含两端点)联
yi 1 ai xi 1 bi xi 1 ci 2 yi1 ai xi1 bi xi1 ci yi ai xi2 bi xi ci 可以求出 ai , bi , ci
分段插值流程图
4.4.3 拟合法 一、最小二乘法 利用n次多项式进行拟合,可以保证在n+1 个节点上校正误差为零,因为拟合曲线折线恰好经 过这些节点。但是,如果这些实验数据有随机误差, 得到得校正方程并不一定能反映出实际的函数关系。 因此,对于含有随机误差得实验数据的拟合,通常 选择误差平方和的最小这一标准来衡量逼近结果, 这就是最小二乘法原理。
max ( x) f ( x)
线性最佳一致逼近法
分段最佳一致逼近法
分段线性最佳一致逼近
谢谢!
非等距节点分段直线插值
四、抛物线插值
如图所示将曲线分成四段,每一段都可以用一个二阶抛物线方程
y ai x2 bi x ci (i 1,2,3,4) 来描绘。其中,抛物线的系数 a , b , c i i i
可通过下述方法获得:每一段找出三点 立方程 2
xi 1 , xi1 , xi
) 第一, z ( x的表达式比较简单,便于计算机处理。故 一般为多项式。
第二,在所有选定的校准点(也称插值点) 上满足:
基于SoPC技术的传感器非线性软件校正的实现
基于SoPC技术的传感器非线性软件校正的实现0 引言现代测量系统中,传感器的工作性能直接影响整个系统。
由于受外界因素的影响,传感器大多具有非线性特性,致使测量仪表或系统的输入与输出之间不能保证很好的线性关系。
除了采取硬件补偿电路外,对于软件补偿算法的研究受到更多的重视。
由于受数据总线宽度和工作频率的影响,软件算法补偿的研究更多是在计算机上仿真实现的,而现场的测量系统往往建立在单片微处理器的基础上。
微电子技术的迅速发展,使得集成电路设计和工艺技术水平得到很大的提高,片上系统(system on a programma-ble chip,SOPC)技术把系统的处理机制、模型算法和电路设计紧密结合,在单片芯片上实现复杂系统的全部功能。
基于FPGA的SOPC技术,软件算法修改和硬件平台结构调整都是在线可编程的,其灵活性和可靠性是其他单片微处理器无法比拟的。
本文采用ALTERA公司提供的SOPC技术,研究传感器的非线性软件校正的算法实现。
1 非线性软件校正原理一个受多个参量影响的传感器系统可表示为y=f(x,t1,t2,…,tk),其中,x为待测目标参量,t1,t2,…,tk为k个非目标参量,y为传感器输出。
为了消除非目标参量对传感器输出的影响,一般采用逆向建模的方法。
实际测量的数据,由于受非目标参量的影响,它与目标参量之间的函数关系不再是线性的。
逆向建模的目的是通过非线性映射,把非线性函数关系x=f-1(y,t1,t2,…,tk)向线性函数关系x=y/A逼近。
在模型中,测量数据和非目标参量的测量值作为输入,目标参量的线性值作为模型的输出,按照一定的算法原则,不断调整模型的参数,使得模型输出误差在允许的范围之内。
在本系统中,选用模拟温度传感器AD590作为校正目标,数字温度传感器DS18B20测量值作为模型的期望输出,气体传感器TGS813测量值为非目标参量输入。
系统采用ALTERA公司CYCLONEⅡ系列的EP2C35F672 FPGA作为核心处理器,采用QUARTUS-Ⅱ自带的SOPC Builder开发包作为算法的调试环境,在FPGA其内部实现测量数据的智能处理。
神经网络在校正传感器非线性度方面的研究
神经网络在校正传感器非线性度方面的研究
近年来,人们的对用神经网络校正传感器非线性度的研究日益增多。
神经网络用来校正传感器非线性度,可以减少传感器的模拟环节,从而提高测量的精度。
神经网络校正能有效估计传感器非线性度,消除传感器扰动和振动干扰,从而改善测量精度。
神经网络校正传感器非线性度一般采用深度学习框架,比较常见的深度学习模型有多层感知机MLP、卷积神经网络CNN、循环神经网络RNN和深度玻尔兹曼机D-BFM等。
根据特点,选择深度学习模型以解决某一非线性校正问题。
为了提高模型的准确率,考虑到误差函数的优化和参数的调整,可以利用各种梯度下降方法进行调整,比如分布式随机梯度下降法DRL-SGD,抑制式随机梯度下降法SLG-SGD和多级梯度下降法MLG-SGD。
研究表明,以神经网络为基础的传感器非线性度校正方法,可有效校正传感器的非线性变化,在误差估计和传感器恢复精度和稳定性方面,均获得了显著提高。
此外,采用此方法还可以有效缩短校正时间,降低计算成本,提高平台的可靠性。
总之,神经网络校正传感器非线性度,在误差分析、精度恢复和计算成本等方面有着良好的表现,也有利于提高传感器网络整体精度和可靠性。
随着计算机硬件和算法的不断完善,神经网络在传感器非线性度校正方面有望有更多出色表现。
应变式称重传感器的非线性校正
计 算 机 应 用 研 究 Application Research of Computers
Vol. 30 No. 1 Jan. 2013
应变式称重传感器的非线性校正
景
摘
*
婧
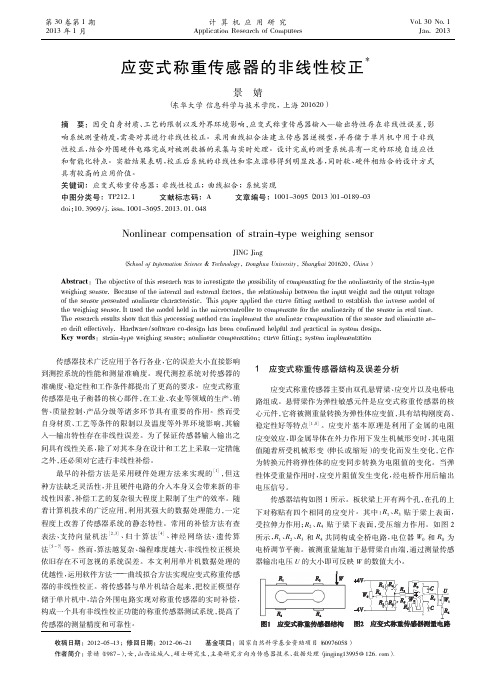
( 东华大学 信息科学与技术学院,上海 201620 ) 要: 因受自身材质、 工艺的限制以及外界环境影响, 应变式称重传感器输入—输出特性存在非线性误差, 影
响系统测量精度, 需要对其进行非线性校正。采用曲线拟合法建立传感器逆模型, 并存储于单片机中用于非线 性校正, 结合外围硬件电路完成对被测数据的采集与实时处理。设计完成的测量系统具有一定的环境自适应性 和智能化特点。实验结果表明, 校正后系统的非线性和零点漂移得到明显改善, 同时软、 硬件相结合的设计方式 具有较高的应用价值。 关键词: 应变式称重传感器; 非线性校正; 曲线拟合; 系统实现 中图分类号: TP212. 1 文献标志码: A 文章编号: 1001-3695 ( 2013 ) 01-0189-03 doi: 10. 3969 / j. issn. 1001-3695. 2013. 01. 048
[1 ]
1
应变式称重传感器结构及误差分析
应变式称重传感器主要由双孔悬臂梁 、 应变片以及电桥电
路组成。悬臂梁作为弹性敏感元件是应变式称重传感器的核 心元件, 它将被测重量转换为弹性体应变值, 具有结构刚度高、 稳定性好等特点
[1 , 8 ]
。 应变片基本原理是利用了金属的电阻
应变效应, 即金属导体在外力作用下发生机械形变时, 其电阻 值随着所受机械形变( 伸长或缩短) 的变化而发生变化, 它作 为转换元件将弹性体的应变同步转换为电阻值的变化 。 当弹 性体受重量作用时, 应变片阻值发生变化, 经电桥作用后输出 电压信号。 传感器结构如图 1 所示。板状梁上开有两个孔, 在孔的上 R3 贴于梁上表面, 下对称贴有四个相同的应变片 。 其中: R1 、 R4 贴于梁下表面, 受拉伸力作用; R2 、 受压缩力作用。 如图 2 R1 、 R2 、 R3 和 R4 共同构成全桥电路, 所示, 电位器 W0 和 R0 为 电桥调节平衡。被测重量施加于悬臂梁自由端, 通过测量传感 器输出电压 U 的大小即可反映 W 的数值大小。
传感器作业——非线性误差分析
学生:XXX 学号:XXXXXXXXXXX传感器的非线性误差仪器仪表等测量工具的输入、输出(测量、结果)分别作为直角坐标系的纵轴、横轴,选择适合的坐标轴,并将理想的输入输出对应点标入坐标,可以得到一条理想输入输出关系曲线。
将实际的输入输出对应点标入坐标,可以得到一条实际输入输出关系曲线。
最理想的情况下这两条曲线应该重合,实际上是不可能做到的,这时两条曲线之间的距离就是非线性误差。
一、输入输出曲线的拟合方式:1)直线拟合:直线拟合大致想到以下几种方式:1.以最大△y值判断最佳拟合直线:由于只需要在传感器工作范围内拟合,故只在其工作范围内进行输入输出直线的拟合。
用直线段在其范围内对其拟合,每段拟合直线段都将对应得到一个最大△y值,拟合直线不同,各自最大△y值也不同。
其中最大△y值最小的直线,即为此种拟合方式下对应的最佳拟合直线。
2.以最小二乘法的方式得到最佳拟合直线:以最小二乘方式拟合即为用其误差的平方和判断。
在传感器工作范围内,用直线段对其进行拟合,每段拟合直线段都将对应得到一个误差的平方和值,拟合直线不同,各自误差的平方和也不同。
其中误差的平方和最小的直线,即为此种拟合方式下对应的最佳拟合直线。
2)离散的方式拟合:用阶梯型的曲线在工作范围内对其进行拟合。
每两个阶梯之间的距离即为所用硬件计算的最小时间(或最小时间的2N倍),则最大误差△y由硬件的运算速度决定。
二、常用的非线性传感器的误差补偿方法:非线性传感器的误差补偿方法从硬件方面讲,有补偿电路;从软件方面讲,有神经网络法、数据融合法等;此外也有将软件硬件技术结合起来的方法。
1)硬件补偿:采用传感器电桥电路非线性误差的反馈补偿法。
对于大多数应用电桥电路的传感器,如电阻式温度计、压力传感器等,必须测出电桥中一个或两个桥臂电阻的变化量,即传感器电阻的变化量,作为衡量被测物理量的大小,使传感器具有线性特性。
由于电桥输出电压与桥臂电阻之间存在非线性关系,如图1所示,电桥输出电压与传感器变化量成非线性关系。
基于SVM的传感器非线性特性校正新方法
基于SVM的传感器非线性特性校正新方法摘要:介绍了一种基于支持向量机的解决传感器系统非线性特性问题的新方法。
支持向量机是Vapnik教授提出的基于统计学习理论的新一代机器学习技术,它有效地解决了小样本学习问题,因此该方法对样本数量没有特殊的要求。
实验证明该方法有效,同时研究表明该方法也能用于其他系统的非线性校正。
关键词:非线性校正;神经网络;支持向量机;拟合方法;传感器0前言现代控制系统对传感器的准确度、稳定性和工作条件等方面提出了很高的要求。
然而,从严格意义上来说,目前绝大多数传感器特性都不理想,其输入输出特性大多为非线性关系。
为此,人们通过一些方法来进行非线性补偿和修正。
特别是近年来,随着神经网络的发展,有不少学者提出了基于神经网络进行非线性传感特性校正的方法。
这些方法一般是用一个多层的前馈神经网络去映射传感器特性曲线的反函数作为校正环节,算法相对简单,实现容易。
但是通过分析神经网络的基本工作原理,笔者认为该方法依然存在一些不足[1、6]:1)在训练过程中神经网络极容易陷入局部最小,而不能得到全局最小;2)神经网络过分依赖训练数据的质量和数量,但大多数情况下样本数据十分有限,由于噪声影响,存在数据不一致情况,对神经网络的训练结果影响较大;3)输入数据往往是高维的,而训练结果仅是输入空间的稀疏分布,所以大量的高维数据必然会大大增加算法的训练时间。
支持向量机SVM[4,5](Support Vector Machine)是基于统计学习理论的一种新的学习方法,最早由Vapnik教授及其合作者于上世纪90年代中期提出。
由于其优良特性,最近引起了许多研究者的兴趣。
支持向量机主要用于模式识别,目前在该方面成功的范例较多;与模式识别相比,支持向量机用于函数拟合的成功应用较少。
和神经网络相比,支持向量机是基于统计学习理论的小样本学习方法,采用结构风险最小化原则,具有很好的泛化性能;而神经网络是基于大样本的学习方法,采用经验风险最小化原则。
4.4非线性校正算法

) 第一, z ( x的表达式比较简单,便于计算机处理。故 一般为多项式。
第二,在所有选定的校准点(也称插值点) 上满足:
z j (x j ) f (x j ) y j
满足上式的
z (x ) 称为 y f ( x的插值函数。 )
) 插值点实际上就是 z ( x 和
x x0 x x1 p n ( x) y0 y1 a1 x a0 x0 x1 x0 x1
其中:
y1 y0 a1 , x0 x1
a0 y0 a1 x0
若(x0,y0)、(x1,y1),取在非线性特性曲线f(x) 或数组的两端点A、B,如下图中的直线表示插值方程, 这种线性插值就是最常用的直线方程校正法
n
i 1
n
2 xi
i 1
n
xi
三、曲线拟合
为了提高拟合精度,通常对n个实验数据对(xi,yi) 选用m次多项式 :
y f x a0 a1 x a2 x am x
2 m
a x
i j 1
m
xi
2 i
xim 1
x
a0 m 1 a1 i xi2 m am xim
y x y
i
i i xim yi
由上式可求得m+1个未知数aj的最佳估计值。
最小二乘法原理:
设被逼近函数为f(xi),逼近函数为g(xi),
xi为x上的离散点,逼近误差为 :
V xi f xi g xi
记为 :
神经网络在校正传感器非线性度方面的研究
神经网络在校正传感器非线性度方面的研究传感器是一类重要的检测装置,可以检测外界变化。
它是实现智能控制系统的重要组成部分,其质量和性能对控制系统的性能具有重要的影响。
然而,由于物理指标的非线性性,传感器存在着一定的漂移现象,从而影响传感器的准确度和精度。
因此,校正传感器非线性度成为实现传感器高准确度检测的关键技术。
神经网络是近些年发展迅速的一种新型智能技术,是模仿人脑神经元工作的一种非线性的模式识别算法。
它由若干节点组成,每个节点与其他节点有联系,可以实现复杂的非线性运算过程。
神经网络具有学习能力,可以根据已知样本数据,以及通过学习过程调整权重,实现对输入样本的分类。
因此,神经网络可以用来校正传感器的非线性度。
首先,需要收集大量来自传感器的数据作为训练样本。
然后,建立神经网络,选择节点的数量、节点的类型以及连接权重的结构。
根据输入的合适的权重,利用神经网络进行训练,并调整权重值,以期满足训练样本的分类要求。
然后,可以对神经网络进行测试,由此获得模型,并使用该模型进行传感器的非线性校正。
传感器非线性校正的神经网络模型应用有很多优点,如模型的精确度高、稳定性强等。
此外,神经网络模型具有非线性校正能力,可以根据不同的传感器对应的输入和输出数据,将非线性因素进行校正,以达到较高的精度。
最后,神经网络模型具有可伸缩性,可以满足不同传感器的自适应性需求。
综上所述,神经网络技术在校正传感器非线性度方面有着重要的作用。
神经网络可以用来提高传感器的准确度,并提供准确、可靠的结果。
因此,神经网络开发和应用,将对智能控制系统的整体能力质量产生非常重要的作用。
非线性自校正
非线性自校正一 传感器非线性校正原因智能仪表的模拟输入通道一般由传感器、前置放大电路、有源滤波器、采样保持电路(S/H)、A/D 转换器和微机系统等电路组成。
传感器非线性的产生是生产过程中敏感芯片在工艺上处理不当造成的,为提高精度对其进行非线性的线性化校正在许多测试计量场合中是十分必要的。
由于电子元器件性能参数的离散性、稳定性和温度敏感性等问题,目前还得不到根本的解决。
因此,从传感器到A/D 转换之间的任何一个环节都存在非线性的问题,使得A/D 转换值n 与被测量x 不成线性关系,即n ≠ax+b(a 、b 为常数)。
如果不解决这种非线性问题,将会严重影响智能仪表的测量精度。
这里我们只讨论传感器的非线性校正方法。
传感器就是一种以一定的精确度将被测物理量(如位移、力、加速度等)转换为与之有确定对应关系的、易于精确处理和测量的某种物理量的测量部件或装置。
狭义地定义为:能把外界非电信号转换成电信号输出的机器或装置。
传感器的作用就是把光、声音、温度等各种物理量转换为电子电路能处理的电压或电流信号。
理想传感器的输入物理量与转换信号量呈线性关系,线性度越高,则传感器的精度越高,反之,传感器的精度越低。
在自动检测系统中,我们总是期望系统的输出与输入之间为线性关系,但在工程实践中,大多数传感器的特性曲线都存在一定的非线性度(有时又称为线性度与积分线性度)误差,另外,非电量转化电路也会出现一定的非线性。
传感器非线性特性产生的原因从传感器的变换原理可以看出,利用各类传感器把物理量转换成电量时,大多数传感器的输出电量与被测物理量之间的关系都存在一定的非线性,这是数据采集系统产生非线性特性的主要原因,其次是变换电路的非线性,现分别叙述如下:1.1传感器变换原理的非线性。
如用热敏电阻测量,热敏电阻Rt 与t 的关系是:Rt=A ・exp(B/T) (1)式中,T=273+t,t 为摄氏温度;A,B 均为与材料有关的常数,显然Rt 与t 呈非线性。
基于RBF神经网络的传感器非线性误差校正方法
计算与测试基于RBF神经网络的传感器非线性误差校正方法*侯立群,张智娟,仝卫国(华北电力大学自动化系,河北保定071003)摘要:介绍了利用人工神经网络进行传感器非线性误差校正的原理。
提出了传感器非线性误差校正的径向基函数(RBF)神经网络方法,并与采用BP神经网络校正非线性误差进行了比较。
最后给出了一个仿真实验,实验结果表明:采用RBF神经网络可以明显提高网络收敛速度,大大减小传感器非线性误差,校正效果优于BP神经网络。
关键词:神经网络;径向基函数;非线性误差;校正中图分类号:TP212文献标识码:A文章编号:1000-9787(2004)03-0043-03Nonlinear errors correcting method of sensors basedon RBF neural networkHOU L-i qun,ZHANG Zh-i juan,TONG We-i guo(Dept of Automation,North China Electric Power University,Baoding071003,C hina)Abstract:The principles for correcting the nonlinear errors of the sensors with a neural network are introduced.The method of radial basis function neural network(RB FNN)is given to correct the nonlinear errors of the sensors.A BP neural network has been developed to solve the same problem for comparison.The experimental results show that network learning speed can be sped up markedly and nonlinear errors of the sensors can be greatly reduced by using RBFNN.RB FNN is q ui te effective and superior to BPNN in correcting nonlinear errors of the sensors.Key words:neural network;radial basis function(RBF);nonlinear errors;correction0引言在测控系统中,一般采用传感器对被测参数进行拾取和转换。
传感器模拟信号非线性修正及温度补偿自适应算法-文档资料
传感器模拟信号非线性修正及温度补偿自适应算法理想载荷传感器在满量程范围内模拟输出信号的非线性应该趋近于零,并不受温度影响,但在实际工作中,受生产工艺、制造材料等影响,传感器的模拟输出信号的实际非线性较大,且在不同的温度环境下工作,同一载荷条件下,由于环境温度的不同其输出的模拟信号也不同,如果忽略温度对传感器的影响而采用常规的信号处理方法进行处理,得到的结果与实际情况相比可能存在有较大误差。
在这种情况我们提出了传感器模拟信号多温区分段线性修正自适应算法。
该算法通过多温区补偿修正温度对传感器输出特性的影响,多段非线性修正算法的实现,使得测量值尽可以的趋近真实值,通过这种方法,提高传感器输出信号的非线性指标,降低温度多传感器输出的影响,提高称量系统测量准确度,降低系统测量误差。
一、工作原理模拟信号多温区分段修正自适应算法含以下三方面的内容:第一:温区的划分:通过大量试验发现:同一载荷条件下在一定温度变化范围内传感器输出的模拟信号收温度影响较小,可以忽略不计,在此情况下提出温区的概念,同一载荷条件下在同一温度范围内传感器输出信号变化很小,将这一温度范围划分为一个温区,在该温区内传感器模拟输出信号基本不变。
可利用高低温箱将传感器工作的全温度范围分为多个温区。
在不同的温区内同一载荷条件下传感器输出基本不受温度影响。
第二:同温区分段标定:由于传感器在同一温区内同一载荷条件下输出基本不受温度影响,我们可以在同一温区内对传感器进行分段修正,在传感器量程范围内,对传感器施加不同载荷,记录传感器的加载载荷值及输出模拟信号值、绘制传感器模拟信号输出曲线,根据输出曲线的实际情况,将曲线划分成若干直线段,划分的依据为直线段尽可能的逼近真实曲线,找出这些直线段的端点对应的载荷值并记录,利用标定软件对传感器在这些点上进行加载标定,并存储标定参数;这样在传感器工作的每个温区内都有一个分段标定的参数区。
第三:多温区分段修正算法的实现:对一个已经多温区分段修正的传感器而言,CPU每采集一个有效的传感器输出的模拟信号数据的同时也采集了当前环境温度值,CPU根据采集的温度值确认当前传感器所处温区,嵌入式软件提取该温区传感器的标定参数段,根据AD转换的内码值确定线性运算的区域,在该区域内进行线性运算得出实际载荷值。
传感器非线性的硬件校正方法
摘
要 :从 应用的角度总结了传感器非线性的硬件校正方 法 , 论 了这些方 法的优点 、 限和应用 技巧 。 讨 局
讨论结合实例 , 实用性 强 , 对传感器非线性 的硬件校正技术具有较好的指导作用。 关键词 :传感器 ; 特性 ; 非线性 ;校正 中圈分类号 :T 2 2 9 P 1 文献标识码 :A 文章编号 :10 9 8 ( 0 2 0 0 0 o 00 77 2 0 )5 0 1 4
中硬件方法在实时性强、 简便 、 经济等方面具有软件 方法难以替代 的优势。本文从应用 的角度总结传感
器 非线 性的硬 件 校正 方法 , 论这 些 方法 的优 点 、 讨 局 限和应 用技巧 。 因传感器 的种类 和型号 繁 多 、 性各有 不 同 , 特 又 为突 出实用 , 以下讨 论 均 结 合 实例 。但 每种 校 正 故 方法 的原理 和技 术 都具 有 普 遍 意 义 , 用 于具 有 类 可
Ke Ⅵ 口 : s n r h r c e it  ̄n n ie r y;∞nt t n y ‘ I 出 e ∞ :c a trsi e c o Jn a i l ci o0 引 Nhomakorabea言
使其 等效 电阻值 与温 度 的关 系在 一定 的温度 范 围内 近似呈 线性 。一 般 情 况下 , 回路 电流作 输 出量 时 取 选用 串联形 式 , 电桥 测 量 电路 中选 用并 联 形 式 或 在 串 、 联形 式 。金 属 电阻 器 的 取值 对 校 正效 果 有 重 并 要影 响 。对应用较 多 的并 联形式 , RnR R【 设 、 分 别 为热 敏 电阻在 高温 Th 中温 T 低 温 T【 的电 、 、 下 阻值, 取 T 并 一 Th T【 , 属 电阻器 的阻 : 一T 则金 值 R 的取值 为
应变式称重传感器的非线性校正
中图分类号 : T P 2 1 2 . 1
文献标志码:A
文章编号:1 0 0 1 . 3 6 9 5 ( 2 0 1 3 ) 0 1 . 0 1 8 9 . 0 3
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 . 3 6 9 5 . 2 0 1 3 . 0 1 . 0 4 8
No n l i n e a r c o mp e n s a t i o n o f s t r a i n — t y p e w e i g h i n g s e n s o r
J I N G J i n g
( S c h o o l o fI n f o r m a t i o n ci S e  ̄e&T e c h n o l o g y ,D o n g h u a U n i v e r s i t y , S h a n g h a i 2 0 1 6 2 0,C h i n a )
Ke y wo r d s :s t r in a : t pe y we i g h i n g s e n s o r ;n o n l i n e r a c o mp e n s a t i o n;c u r v e f i t t i n g ;s y s t e m i mp l e me n t a i t o n
r 0 d r i f t e f e c t i v e l y .Ha r d w a r e / s o f t wa r e C O — d e s i g n h a s b e e n c o n f i r me d h e l p f u l a n d p r a c t i c l a i n s y ห้องสมุดไป่ตู้ t e m d e s i g n .
三线性系统非线性校正方法综述
三线性系统非线性校正方法综述引言:在真实世界中,许多系统都具有非线性特性。
为了精确地描述非线性系统的行为,并提高系统的可操作性和性能,非线性校正方法被广泛研究和应用。
本文将综述三线性系统的非线性校正方法,以提供一个全面的了解和参考。
一、三线性系统的基本特性三线性系统是一种特殊的非线性系统,它的输出信号与输入信号的乘积之间存在线性关系。
三线性系统的基本特性可用下面的数学方程表示:y = k1x1 + k2x2 + k3x3其中,y为输出信号,x1、x2、x3为输入信号,k1、k2、k3为系数。
二、常见的三线性系统非线性校正方法1. 基于统计建模的方法统计建模方法通过收集大量的测量数据,并利用统计分析方法建立非线性校正模型。
其中,最常用的方法是多项式回归分析。
该方法利用多项式函数逼近真实系统的非线性特性,通过最小二乘法估计多项式系数。
然后,将得到的校正模型应用于实际系统中,以实现非线性校正。
2. 基于神经网络的方法神经网络是一种能够拟合非线性函数的强大工具。
基于神经网络的非线性校正方法首先需要收集一组输入-输出数据对,然后利用这些数据训练神经网络模型。
通过不断迭代优化网络的权重和偏置,使得模型能够准确地描述系统的非线性特性。
一旦神经网络训练完成,它就可以应用于实际系统中,对输入信号进行非线性校正。
3. 基于模糊逻辑的方法模糊逻辑是一种用于处理不确定性问题的有效工具。
基于模糊逻辑的非线性校正方法首先需要建立一个模糊推理系统,包括模糊集合的定义、模糊规则的建立和模糊推理的执行。
然后,将该模糊推理系统应用于实际系统中,对输入信号进行非线性校正。
该方法的优点是能够处理模糊和不确定性的输入信号,提高了系统的适应能力和鲁棒性。
三、三线性系统非线性校正方法的应用三线性系统非线性校正方法在许多领域都有广泛的应用。
1. 电力系统电力系统中的许多设备和组件都具有非线性特性。
通过采用三线性系统非线性校正方法,可以提高电力系统的稳定性和可靠性,降低能耗和损耗。
传感器软件非线性校正方法综述
传感器软件非线性校正方法综述
范铠
【期刊名称】《上海计量测试》
【年(卷),期】2004(031)002
【摘要】简单介绍传感器软件非线性校正的几种方法,针对具有法定分度表的温度传感器,介绍正被逐步接受的两种实用方法.
【总页数】5页(P8-12)
【作者】范铠
【作者单位】上海工业自动化仪表研究所
【正文语种】中文
【中图分类】S951.41
【相关文献】
1.基于BA-SVM的铂电阻温度传感器非线性校正方法 [J], 杨舟;李刚;蒋雯倩
2.基于LS-SVM逆系统方法的传感器非线性校正方法研究 [J], 雷烨;黄鲁江
3.角度传感器的软件非线性校正 [J], 牟永敏
4.基于函数链神经网络的智能传感器非线性校正方法 [J], 徐桂林;黄彦;孙振庭
5.基于函数链神经网络的智能传感器非线性校正方法 [J], 徐桂林;黄彦;孙振庭因版权原因,仅展示原文概要,查看原文内容请购买。
(整理)传感器非线性误差的修正
(整理)传感器⾮线性误差的修正传感器⾮线性误差的修正摘要:传感器在采集数据时存在⼀定的⾮线性误差。
要使系统的性能达到最佳,必须对传感器的⾮线性误差进⾏分析和处理。
本⽂讨论了传感器⾮线性误差的⼏种处理⽅法,并对各种⽅法作了⽐较。
关键词:⾮线性误差,硬件电路校正,查表法,插值法,最⼩⼆乘法,频域修正法⼀、引⾔在⼯业过程控制中,由于传感器的⾮线性输出特性和同种传感器的输出存在⼀定的分散性,测量结果会产⽣⼀定的误差。
为此,我们需要对传感器的特性进⾏校正和补偿,以提⾼测量的精度,并且使传感器输出线性化和标准化。
对⾮线性误差的矫正和补偿可以采⽤硬件电路或者软件的⽅法来实现。
⼆、采⽤电路进⾏⾮线性误差的矫正采⽤硬件电路对⾮线性误差进⾏矫正,优点是速度快;缺点是价格⾼,拟合程度不好。
通常我们采⽤以下⼏种电路进⾏校正:1、算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到⼀条是原传感器输出⾮线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所⽰。
设温度变化范围为a~c,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a,R b,R c,由于传感器的⾮线性,R b≠(R a+R c)/2。
为了使三个点的电路输出为线性,则应满⾜并联电阻R pb=(R pa+R pc)/2。
其中R pa,R pb,R pc分别为温度在a,b,c时的并联电阻。
通过计算可得:b R R 2R R R 2R -)R (R Rc a ca c ab -++=2、桥路补偿法该⽅法的基本原理是利⽤测量桥路的⾮线性来校正传感器的⾮线性。
电路如右图所⽰。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到⽅程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此⽅程组可得到满⾜要求的R3、R B 、ε。
非线性传感器的校正方法

(1) 理论直线法 如图 2 (a) 所示 ,以传感器的理 论特性作为拟合直线 ,它与实际测试值无关 。优点是 简单 、方便 ,但通常 L m 很大 。
(6)
3 折线逼近法
将传感器的特性曲线用连续有限的直线来代
替 ,然后根据各转折点和各段直线来设计硬件电路 ,
这就是最常用折线逼近法 。转折点越多 ,各段直线就
越逼近曲线 ,精度也就越高 ,但太多了就会因为线路
本身误差而影响精度 , 所以转折点的选取与要求的
精度和线路有密切的联系 ,在实际应用中 ,应采取具
实际使用时 ,可以把计算法和查表法结合起来 , 形成插值法 。
插值法就是在传感器 X —Y 特性曲线中 , 把输 入量 X 分成 N 个均匀的区间 ,这样每个区间的端点 Xk 都对应一个输出 Yk , 把这些 ( Xk , Yk) 编制成表格 存贮起来 。实际的检测值一定会落在某个区间 ( Xk , Xk +1) 内 , 线性插值就是用直线段近似代替区间里 的实际曲线 , 通过近似公式计算出 Yi 。所以线性插
第 18 卷 第 6 期
石油工业技术监督
计量技术
非线性传感器的校正方法
张家田 董秀莲
西安石油学院电子工程及仪器系 (西安 710065)
摘 要 传感器非线性的产生是生产过程中敏感芯片在工艺上处理不当造成的 ,为提高精度对其进行非线 性的线性化校正在许多测试计量场合中是十分必要的 。分别从硬件和软件两方面给出了校正的方法 ,并对硬 件 、软件校正的优缺点做出了总结 。非线性的线性化校正采用何种方法 ,要根据实际应用的要求来确定 。 主题词 传感器 非线性 线性化校正 Abstract Non - linearity of sensors usually results from imp rop er treatment of sensitive chips in the p rocess of p ro2 duction. In order to increase their p recision ,it is very necessary to make linear corrections of them in many measuring