4.5非线性校正算法
gamma校正算法灰度值

gamma校正算法灰度值
Gamma校正是一种非线性操作,用于调整图像的灰度值,使其更符合人眼的视觉特性。
在数字图像处理中,Gamma校正通常用于改善图像的对比度和亮度,使得图像看起来更加自然和舒适。
Gamma校正的原理是基于人眼对亮度的感知是非线性的,即人眼对亮度的感知随着亮度的增加而加速增加,随着亮度的减小而减缓减小。
因此,通过将图像的灰度值进行非线性变换,可以更好地匹配人眼的感知特性,提高图像的可视效果。
在数学上,Gamma校正通常使用以下公式实现:
O=I^gamma
其中 O 是校正后的灰度值,I 是原始灰度值,gamma 是校正系数。
当gamma 大于 1 时,图像的对比度会增强,当 gamma 小于 1 时,图像的
对比度会降低。
在实现上,通常需要将输入的灰度值进行映射变换,以得到校正后的灰度值。
这个映射关系可以用一个曲线来表示,这个曲线就是Gamma校正曲线。
Gamma校正的方法有很多种,包括简单的幂函数、分段函数、多项式函数等。
不同的方法可以适用于不同的场景和需求,需要根据具体情况选择适合的方法。
11非线性校正
第11讲 并不多余的技术——非线性校正由于线性系统灵敏度恒定,便于计算和显示,还适用于动态分析,因此希望检测系统为线性系统,对于非线性系统可以加入校正环节使之成为线性系统。
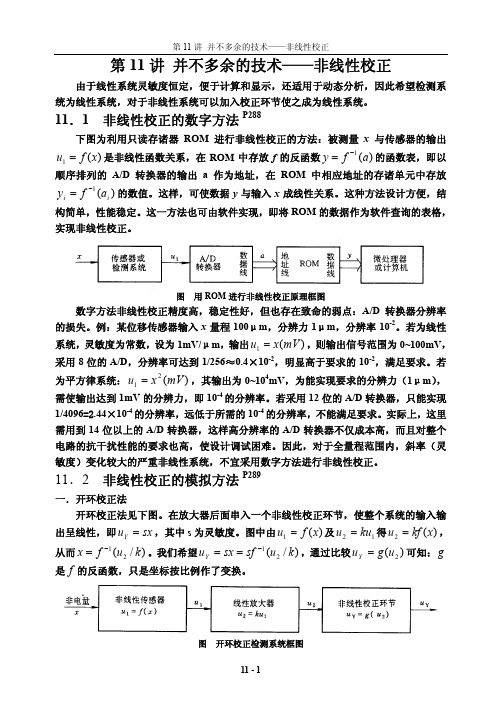
11.1 非线性校正的数字方法P288下图为利用只读存诸器ROM 进行非线性校正的方法:被测量x 与传感器的输出)(1x f u =是非线性函数关系,在ROM 中存放f 的反函数)(1a f y −=的函数表,即以顺序排列的A/D 转换器的输出a 作为地址,在ROM 中相应地址的存诸单元中存放)(1i i a f y −=的数值。
这样,可使数据y 与输入x 成线性关系。
这种方法设计方便,结构简单,性能稳定。
这一方法也可由软件实现,即将ROM 的数据作为软件查询的表格,实现非线性校正。
图 用ROM 进行非线性校正原理框图数字方法非线性校正精度高,稳定性好,但也存在致命的弱点:A/D 转换器分辨率的损失。
例:某位移传感器输入x 量程100μm ,分辨力1μm ,分辨率10-2。
若为线性系统,灵敏度为常数,设为1mV/μm ,输出)(1mV x u =,则输出信号范围为0~100mV ,采用8位的A/D ,分辨率可达到1/256≈0.4×10-2,明显高于要求的10-2,满足要求。
若为平方律系统:)(21mV x u =,其输出为0~104mV ,为能实现要求的分辨力(1μm ),需使输出达到1mV 的分辨力,即10-4的分辨率。
若采用12位的A/D 转换器,只能实现1/4096=2.44×10-4的分辨率,远低于所需的10-4的分辨率,不能满足要求。
实际上,这里需用到14位以上的A/D 转换器,这样高分辨率的A/D 转换器不仅成本高,而且对整个电路的抗干扰性能的要求也高,使设计调试困难。
因此,对于全量程范围内,斜率(灵敏度)变化较大的严重非线性系统,不宜采用数字方法进行非线性校正。
11.2 非线性校正的模拟方法P289一.开环校正法开环校正法见下图。
交通矢量地图离散非线性校正算法
校正算法 , : 即的选取 以及所选取 离散块 内各节 点的相应调 整。通过对 整个 地图平面的分块非线性校正 , 在合理选取校正样本 的情况下能够对整个地图的所有局部区域达到最优的校正 。与传统的线 性 自动校正算法相 比, 这种算法可 以有效地消除矢量地 图中的非线性误差 , 论上也有所深 入。实验 中将该 算法应用 于合 理 肥、 成都等城市 的矢量地 图校正 中, 取得 了良好 的校正效果 。应用校 正算法得到 的交通矢量地 图将 为交通管 理或监控 导航 系统提供准确的资料信息和更好 的智能决策服务 , 从而给人们生活带来极大的便利。
v hcen v ai d m n o n ytm a dtu r gn u hc n e i c e pe i . e i a i t na o i r gss s i i gm c o v ne et p o l ̄l e l g o n ti e n h bn n o f
KEYW ORDS: c o p; t r o oo y; p i g; s r t ra Ve t rma Newo k t p lg Ma p n Dicee ae
go—ajsn to a e dsr ennier e —ajs n gr m”b e nteaa s bu e ooo ・ e dut gme dn m d” i e ol a o dut ga o t i h ct n g i li h s a do nl iao t plg h ys h t t i c t c r f hm.T ekyt ti agr m i tec os go i rt ae dgo—ajsn en e . l r u a s ut o te e h e s o t hoi f s e r a e oh i l h s h n d c e an dut gt o si i i h d nt T r s edvd g rannierajsn f h hl m p i ecs a w h s o eraoal Sl- h u ht i i —ae ol a d t go ew o a , nt aet t eco eSm snbe a I e h in n ui t e h h e T pe , ltepra ae a e tebs ajsn .C m ae et dt n na uo—ajsn gr m, t i a a i r c gt et d t g o prdt t aioa l erat s lh t l a n h ui oh r i l i dut ga o t i l i h i
第七章 非线性校正函数及其应用

第七章非线性校正函数及其应用嵌入式PLC提供了多种特殊功能函数,以解决控制过程中遇到的特殊问题。
非线性校正函数,通常情况下,我们又称热电偶转换函数,是因为我们首先将此函数用于不同的热电偶进行温度测量转换的。
多数情况下,传感器的传感值和其表示的物理量之间不是线性的,象热电偶类传感器还存在低端温度补偿问题。
因此对不同的传感器,只要知道其传感特性(用非线性表格表示)的情况下,嵌入式PLC能快速将测量值转换成被测物理量。
因此,有了非线性转换函数后,嵌入式PLC可以接入各种特性的传感器,将其传感值用来显示、控制等。
比如,接入热电偶类:K,S,B,E,.......。
接入热电阻类:PT100,Cu50,非标热敏电阻等。
接入标准信号类:0-5V,0-10V,0-10mA,4-20mA等。
其他各种传感器,转为电信号后,不必进行线性校正,直接输入到嵌入式PLC,线性校正工作由PLC完成。
非线性校正函数在含有模拟量的PLC中,得到大量的应用,如在EASY-A1600,EASY-M0808R-A0404NB的出厂程序中,就多次引用此函数。
函数编号:D8200函数入口指针:D8201函数出口指针:D8202函数使能调用:M8200(调用后,函数执行返回时,M8200自动复位)函数编号赋值范围:1-32,表示共计规划32个函数。
函数编号超值处理:当N>32时,调用函数视为(N-32)号函数。
如33视为1,34视为2等等。
非线性转换函数参数:函数号D8200: D8200=K11入口参数指针D8201:指针长度6个字,存放6个指针。
为方便起见,用P1,P2,P3,P4,P5,P6表示6个指针。
出口参数指针D8202:指针长度1个字,指向存放转换温度的寄存器地址。
函数调用使能M8200: SET M8200调用函数。
此外,对于有些热电偶。
不需要进行环温补偿,当不需环温补偿时,必须SET M8204,函数执行后,自行复位M8204。
MAX1452非线性修正应用电路

MAX1452 非线性修正应用电路摘要:MAX1452 是一款高性能的模拟传感器信号调理器,已广泛用于工业领域和汽车电子领域。
对于多数应用来说,传感器输出的非线性修正非常重要。
虽然MAX1452 内部没有集成非线性修正功能,但只需要添加三个电阻即可实现线性输出。
这篇应用笔记给出了修正电路,并提供测试数据验证其有效性。
概述对于非线性输出传感器(例如,湿度传感器),信号调理器是否能够修正传感器的非线性输出非常关键。
本应用笔记介绍如何使用MAX1452 修正传感器输出的非线性,该芯片是极受欢迎的低成本、高性能信号调理器,内置闪存、温度传感器和完整的模拟信号路径。
尽管MAX1452 没有包含非线性修正功能,但可通过非常简单的外围电路实现,即利用三个附加电阻进行非线性修正。
需要注意的是,这种方法仅适合电桥驱动模式的MAX1452,并不适合MAX1455,原因是MAX1455 不能用于电桥驱动模式。
图1. 基本的非线性校准电路非线性修正电路图1 所示为MAX1452 非线性修正电路。
这个线性化处理电路的工作原理是利用OUT 引脚放大后的输出电压对传感器桥的激励电压进行调节。
当OUT 随着传感器输出的增大而增大时,电桥激励也略有增大,产生一个非线性传输函数。
对于标称值为4.7kΩ桥电阻,选择RF = 18kΩ、RS = 1.8kΩ。
ROF 的作用是保证在整个工作条件下将电桥输出偏移到正电压。
根据反馈电路的传输函数,选取ROF 时要确保电桥的差分输出始终为正值:INP - INM > 0。
本应用笔记中实例电路和传感器参数设置如下:BDR 电压(FSO DAC 设置下的电压输出)为3.6V (标称值)。
BDR 电压经过RS 和传感器桥分压后产生大约2.6V 的桥驱动电压。
具体应用中,通过配置PGA 提供系统所需的增益,使0 至100%的差分电桥输出在OUT 引脚产生摆幅为0.5V 至4.5V 的电压。
视频监控系统中的非线性校正算法
Viu l S r ela c y t m s I u v i n e S se a l
Fa a0 i ng Xi y ng ’ [i Vuq a g u in
(noma o n o mu iai n ier g T n j U i r t ,h n h i2 0 9 ) Ifr t n a d C m nct n E g ei , ogi nv s y S a g a 0 0 2 i o n n ei ( hj n nen t n lMaim o e eZ o sa , hj n 1 0 0 Z ei g Itra o a a i r i e C l g ,h uh n Z e a g 3 6 0 ) t l i
征 , 弃 图 像 的 色 彩 和 纹 理 信 息 , 色 彩 系 统 变 换 法 将 所 提 取 抛 用
的 R B背景 图像 转换 成灰 度 图像 。 用 3 3的 滑 动 窗 口进 行 中 G x 值 滤 波 , 留 图像 细 节 . 除 噪 声 。 保 去 由于 道 路 的分 界 线 和 交通 标 志 线 一 般 都 为 白 色 或 黄 色 , 灰 度 值 与 道 路 的 灰 度 值 有 明 显 其 的 区 分 ,根 据 图 像 上 像 素 点 的 灰 度 值 的 变 化 梯 度 及 灰 度 的 暗 一 明一 暗 ( L 变 化 , 采 用 Io i S bl 子 的 卷 积 核 D D) 且 st e oe 算 mp
第六章线性系统的校正方法____串联校正
L(ω )
-20 20 -40
Kv = 30 s1 ′′ ωc ≥ 2.3 rad / s
γ ≥ 400
ωc
1 5 10 -60
h ≥10
dB
Kv = K = 30
ω
由稳态误差求K ① 由稳态误差求 ② 求校正前指标
K
若采用超前校正
0 至少选 m = 80
=1 ω = 3 1500 11.45 c ωc ×0.1 c ×0.2ωc ω
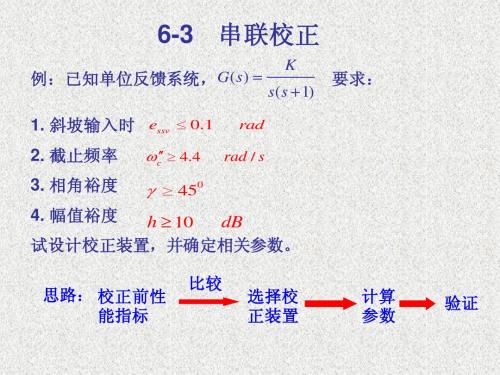
6-3 串联校正
K 已知单位反馈系统, 要求: 例:已知单位反馈系统, G(s) = 要求: s(s +1)
1. 斜坡输入时 essv ≤ 0.1 2. 截止频率 3. 相角裕度 4. 幅值裕度
′′ ωc ≥ 4.4
rad
rad / s
γ ≥ 450
h ≥10
dB
试设计校正装置,并确定相关参数。 试设计校正装置,并确定相关参数。 思路: 思路: 校正前性 能指标 比较 选择校 正装置 计算 参数 验证
K
ω
2
=1
ωc = 10 ≈ 3.16
1
ωc
-40
10
ω
γ = 900 ac tan3.16 ≈ 17.50
③ 比较并选择校正装置
1 + aTs 1 + Ts
ω c ≤ ω c′′
选择超前校正
aGc ( s ) =
④
计算校正装置参数
40 -20 20
1 + aTs aGc ( s ) = 1 + Ts
′′ ′′ L(ωc ) + L′(ωc ) = 0
4. 验证:近似计算校正后截止频率及相角裕度 验证: 仿真检验: Matlab(Simulink) 5. 仿真检验:在Matlab(Simulink)下建立系统模型 尽可能反应系统结构与特性,进行仿真。 尽可能反应系统结构与特性,进行仿真。
基于退火遗传算法的传感器非线性校正方法

1 非 线性 自 校 正优 化模 型 采 用 A G 的非 线 性 校 正 原 理 如 图 1所 示 。 IA
近年来 , 硬件电路补偿 和软件补 偿 2种 方法 在传感 器 非线性校正 问题 中得 到了广泛 的研究 和应用。随着硬件补
采用 随机数策略 , 随机生成 r adm[ 1 , =r o 0,] 若 n
() 5
。 )一z ] , 。 为最小值 。 这里 , A G 以 I A来确定 式( ) 2 中的待定 系数 。
2 AI 框 架 GA 24 .
P 0 P( )+… +P i ) <P( )+P( )+… + ( )+ 1 ( -1 <r 0 1
体。
分 别 为 子个
n ni e r y b t s h rc s n at rc re t g i etrt a e s s u r t o . o l a i , u o t e p e ii f or ci sb t h n la t q a e me h d n t l a o e n e
物理学方法 , 并首先被 K rptc 引入 优化 问题 的求 解 , i ar k等 k i
退火 交叉 操作 是 G 中最主要 的遗 传操作 , 是有 了 A 正 交叉 操作 , 得到 了新一代个体 , 使整个种群 能保持一定 的多
样性 。交叉操作 是仿 照生物 学 中杂交 的原理 , 2个个 体 将
最后 , 求解待定常数 a , a ,。 。a , a 。基本思想是 由式( ) 1
确定 的各个 z ( ) 与 z 的均方差应 最小 , 值 即
∑ [。 一 =∑ [n+ + + z ) z] ( ( 。1n 。 Y
Matlab6.5在智能传感器非线性校正中的应用

Matlab6.5在智能传感器非线性校正中的应用崔焱;常军学【摘要】智能传感器系统中,输入-输出特性经常呈现非线性,曲线拟合法是非线性校正技术常用的方法,但是数据处理繁琐.应用Matlab件处理数据,则语句简单、易读、运算效率极高.文章以Hull-Allen结构光纤位移传感器为例,说明Matlab6.5在智能传感器非线性校正中的具体应用.【期刊名称】《机械管理开发》【年(卷),期】2010(025)004【总页数】2页(P87-88)【关键词】Matlab;传感器;非线性;校正【作者】崔焱;常军学【作者单位】河南省工业科技学校,河南,新乡,453003;河南省工业科技学校,河南,新乡,453003【正文语种】中文【中图分类】TP212.60 引言目前,在智能传感器系统中,前端传感器和调理电路,及A/D转换器的输入—输出特性经常呈现非线性,但经传感器技术工作者对电路和软件的精心设计,使智能传感器系统能够进行非线性的校正,使输出与输入呈理想直线关系,当然其前提是:前端传感器及其调理电路的输入—输出特性(x-u)具有重复性[1]。
非线性自校正技术的数据处理过程中,工作量大,效率较低。
如果采用Matlab软件的某些功能,处理智能传感器系统的数据,则工作量小的多,而且程序简便快捷。
本文将运用Matlab6.5对曲线拟合法进行非线性校正的处理过程,通过Hull-Allen结构的光纤位移传感器来说明。
1 曲线拟合法曲线拟合法是采用n次多项式来逼近反非线性曲线,该多项式的各个系数由最小二乘法确定,其具体步骤为:1)对传感器及其调理电路进行静态实验标定,得出校准曲线。
标定点的数据为:输入 x i:x1,x2,x3,…,x n;输出 u i:u1,u2,u3,…,u n;n为标定点的个数,i=1,2,3,…,n 。
2)假设反非线性特性拟合方程为:式中:a0、a1、a2、…,an为待定常数。
3)求解待定常数a0、a1、a2、…,an。
非线性自校正
非线性自校正一 传感器非线性校正原因智能仪表的模拟输入通道一般由传感器、前置放大电路、有源滤波器、采样保持电路(S/H)、A/D 转换器和微机系统等电路组成。
传感器非线性的产生是生产过程中敏感芯片在工艺上处理不当造成的,为提高精度对其进行非线性的线性化校正在许多测试计量场合中是十分必要的。
由于电子元器件性能参数的离散性、稳定性和温度敏感性等问题,目前还得不到根本的解决。
因此,从传感器到A/D 转换之间的任何一个环节都存在非线性的问题,使得A/D 转换值n 与被测量x 不成线性关系,即n ≠ax+b(a 、b 为常数)。
如果不解决这种非线性问题,将会严重影响智能仪表的测量精度。
这里我们只讨论传感器的非线性校正方法。
传感器就是一种以一定的精确度将被测物理量(如位移、力、加速度等)转换为与之有确定对应关系的、易于精确处理和测量的某种物理量的测量部件或装置。
狭义地定义为:能把外界非电信号转换成电信号输出的机器或装置。
传感器的作用就是把光、声音、温度等各种物理量转换为电子电路能处理的电压或电流信号。
理想传感器的输入物理量与转换信号量呈线性关系,线性度越高,则传感器的精度越高,反之,传感器的精度越低。
在自动检测系统中,我们总是期望系统的输出与输入之间为线性关系,但在工程实践中,大多数传感器的特性曲线都存在一定的非线性度(有时又称为线性度与积分线性度)误差,另外,非电量转化电路也会出现一定的非线性。
传感器非线性特性产生的原因从传感器的变换原理可以看出,利用各类传感器把物理量转换成电量时,大多数传感器的输出电量与被测物理量之间的关系都存在一定的非线性,这是数据采集系统产生非线性特性的主要原因,其次是变换电路的非线性,现分别叙述如下:1.1传感器变换原理的非线性。
如用热敏电阻测量,热敏电阻Rt 与t 的关系是:Rt=A ・exp(B/T) (1)式中,T=273+t,t 为摄氏温度;A,B 均为与材料有关的常数,显然Rt 与t 呈非线性。
c4.5算法的基本原理 -回复

c4.5算法的基本原理-回复什么是C4.5算法?C4.5算法是机器学习领域中的一种决策树算法,是ID3算法的改进版本。
它由Ross Quinlan于1993年提出,是一种用于分类问题的监督学习算法。
C4.5算法的基本原理是通过对数据集进行划分来构建决策树,以实现对新样本进行分类。
下面将详细介绍C4.5算法的基本原理和步骤。
C4.5算法的基本原理是基于信息增益来选择最优特征进行划分。
在构建决策树的过程中,C4.5算法通过计算每个特征的信息增益比来选择最优特征,从而实现对数据集的划分。
信息增益是指在得知某个特征的取值后,对分类结果的不确定性减少的程度。
C4.5算法的步骤如下:1. 选择最优特征:计算每个特征的信息增益比,选择具有最大信息增益比的特征作为当前节点的划分特征。
2. 划分数据集:根据划分特征将数据集划分为多个子数据集,每个子数据集包含具有相同特征值的样本。
3. 递归构建子树:对每个子数据集递归地应用步骤1和步骤2,构建子树。
4. 停止划分:当数据集的所有属性都已经被使用或者数据集中的样本都属于同一类别时,停止划分,将当前节点标记为叶节点,并将叶节点标记为数据集中样本数最多的类别。
5. 构建决策树:将步骤3中得到的子树连接到当前节点,构成完整的决策树。
具体来说,C4.5算法的核心步骤是选择最优特征和划分数据集。
在选择最优特征时,C4.5算法通过计算每个特征的信息增益比来选择最优特征。
信息增益比是信息增益除以划分数据集的熵,熵是度量数据集的纯度的指标。
信息增益比能够避免特征取值较多而导致的信息增益偏大的问题,从而更加准确地选择最优特征。
划分数据集是将数据集根据划分特征的取值划分为多个子数据集,每个子数据集包含具有相同特征值的样本。
划分后的子数据集可以分别作为子树的训练数据,递归地构建子树。
每个子树的构建过程都是通过选择最优特征和划分数据集来实现的。
当数据集的所有属性都已经被使用或者数据集中的样本都属于同一类别时,停止划分,将当前节点标记为叶节点,并将叶节点标记为数据集中样本数最多的类别。
非线性误差校正方法
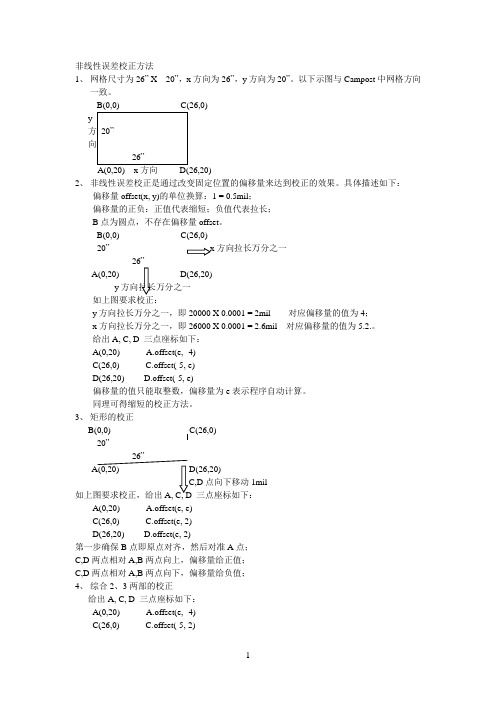
非线性误差校正方法1、网格尺寸为26” X 20”,x方向为26”,y方向为20”。
以下示图与Campost中网格方向一致。
yA(0,20) x方向D(26,20)2、非线性误差校正是通过改变固定位置的偏移量来达到校正的效果。
具体描述如下:偏移量offset(x, y)的单位换算:1 = 0.5mil;偏移量的正负:正值代表缩短;负值代表拉长;B点为圆点,不存在偏移量offset。
B(0,0) C(26,0)20”方向拉长万分之一A(0,20) D(26,20)y如上图要求校正:y方向拉长万分之一,即20000 X 0.0001 = 2mil 对应偏移量的值为4;x方向拉长万分之一,即26000 X 0.0001 = 2.6mil 对应偏移量的值为5.2.。
给出A, C, D 三点座标如下:A(0,20) --- A.offset(e, -4)C(26,0) --- C.offset(-5, e)D(26,20) --- D.offset(-5, e)偏移量的值只能取整数,偏移量为e表示程序自动计算。
同理可得缩短的校正方法。
3、矩形的校正B(0,0) C(26,0)20”点向下移动1mil三点座标如下:A(0,20) --- A.offset(e, e)C(26,0) --- C.offset(e, 2)D(26,20) --- D.offset(e, 2)第一步确保B点即原点对齐,然后对准A点;C,D两点相对A,B两点向上,偏移量给正值;C,D两点相对A,B两点向下,偏移量给负值;4、综合2、3两部的校正给出A, C, D 三点座标如下:A(0,20) --- A.offset(e, -4)C(26,0) --- C.offset(-5, 2)D(26,20) --- D.offset(-5, -2)D点的y值= A点的y值+ C点的y值。
非线性校正
Ps Gs BWs S ( )i N Pn Gn BWn
G ( )
G ( )
Gs
BWs
低通滤波
Gn
Gs'
' Gn
c
BWn
BWLP
2c
(b) 输入信号功率谱密度
(c) 输出信号功率谱密度
锁定放大器中参考信号与输入信号相乘将信 号频谱搬移到0和2ωc附近,噪声被搬移到载 波频率ωc两边;且信号和噪声的功率谱密度 都降低了一半。
2. 闭环校正的一般原理 将非线性反馈环节放在反馈回路上形成闭 环系统,进行线性化校正。 y1 yo y x 传传传 传传传a +
+ yf 传传传传
传感器:y1= f1(x) 加法器:Δy = y1-yf 放大器:yo =aΔy 补偿后:yo=kx+m;
非线性; 线性; 线性; 求:yf=f(yo)?
一、锁定放大器 (Locked Amplifier)
锁定放大器~利用互相关原理,使输入待测的 周期信号和频率相同的参考信号在相关器中 实现互相关,从而将深埋在噪声中携带信息 的周期信号检测出来。 x(t)是混有加性噪声 n(t)的调幅信号
x(t ) A(t ) sin(ct ) n(t )
Gs G 2
' s
Gn G 2
' n
低通滤波器的带宽BWLP应当满足下式
BWs BWLP BWn
输出信噪比
' GS BWs S ( )o ' N Gn BWLP
(S / N )o Gs' Gn BWn BWn ' = (S / N )i Gn Gs BWLP BWLP
非线性优化算法研究及其应用
非线性优化算法研究及其应用一、引言非线性优化是一类重要的数学问题,应用广泛于科学、工程、经济等领域。
目前,该领域已经发展出多种非线性优化算法,本文将介绍其中常用的几种算法及其应用。
二、常见非线性优化算法1. 梯度法梯度法也称作最速下降法,是求解无约束问题的常用方法。
该算法的基本思想是:从某一初始点出发,在每一步中沿着当前位置的求导方向下降最快的方向走向下一个点,直到达到最优解。
梯度法的优点是简单易用,但由于其收敛速度较慢,在复杂问题中应用受到限制。
2. 共轭梯度法共轭梯度法是用于求解对称正定问题的一种方法。
在每一步中,该算法找到和前一步方向不同的下降方向,从而加快了收敛速度。
如果函数能够准确地表示为二次函数,则共轭梯度法能够在有限步数内找到最优解。
3. 牛顿法牛顿法是使用二阶导数信息来求解无约束问题的一种加速方法。
该算法在每一步中使用当前位置的一阶导数和二阶导数信息来进行迭代。
由于牛顿法需要计算二阶导数,因此它可能会受到数值不稳定性的影响。
此外,在复杂问题中它的收敛速度也较慢。
4. 拟牛顿法拟牛顿法是一种非常流行的无约束问题求解方法。
与牛顿法不同的是,拟牛顿法使用一阶导数信息来逼近二阶导数信息。
通常情况下,它会使用BFGS或DFP方法进行逼近。
拟牛顿法的优点是在需要求解大型问题时,它能够处理复杂的变量空间,且比梯度法更快。
三、应用案例1.工程中的优化问题在工程中,优化问题常常用于设计产品、制造工艺和材料的选择等领域。
利用非线性优化算法,工程师可以对设计和生产流程进行优化,提高产品的质量和降低成本。
例如,一家航空公司可能会使用拟牛顿法来优化旅客飞行过程中的飞机燃油消耗问题。
借助该算法,他们可以计算出最佳飞行路线以及在飞机使用的燃料和航速之间进行最优权衡。
2.金融中的优化问题金融中的优化问题也非常关键。
例如,一家投资组合管理公司可能需要在市场上进行投资,并考虑一些限制因素。
非线性优化算法可以帮助他们优化投资策略,达到最佳风险/收益比。
非线性优化算法
非线性优化算法
非线性优化算法是近几年比较流行的一种优化算法,它可以有效地帮助人们解
决复杂的优化问题,可以说是数学优化算法的一个重要分支。
非线性优化算法是一种利用求解非线性,非凸等式和不等式优化问题的算法,
是从经典的优化算法演变出来的一种新兴优化算法。
由于复杂的现实问题多数都是非线性的,而经典的优化算法的收敛性能不太好,因此,使用非线性优化算法来解决复杂的现实优化问题是可行的。
非线性优化算法可以优化非凸目标函数和非线性约束,使其能够快速收敛到最
优解,并且收敛程度非常高。
例如,使用最速下降法(SGD)可以有效地优化非线
性函数;另外,快速收敛最优化算法(CGO)可以有效地优化不等式优化问题;可
以使用拟牛顿法(BFGS)优化强约束等式系统;此外,可以使用过度非线性代数(OLA)优化高维非线性优化问题。
非线性优化算法的一个重要特点是,它可以综
合考虑多个变量,并可以找到最优解;此外,非线性优化算法还可以有效地优化约束等式和不等式,并可以找到最优的变量的分布情况。
总的来说,非线性优化算法在复杂的优化问题中发挥了重要作用,使得许多复
杂的优化问题得到全面解决。
它拥有高度收敛性,能够处理复杂非线性函数和约束,并综合考虑多个变量,这些特点都使它在优化过程中发挥了重要作用。
4.4非线性校正算法教程

例,已知热敏电阻的阻值R(kΩ)与温度t(℃)的关系式如 表4-5-1所示
三、线性插值
线性插值是从一组数据(xi,yi)中选取两个代表性的 (x0,y0)、(x1,y1),然后根据插值原理,求出插值 方程 :
pn (x)
x x1 x0 x1
y0
x x0 x0 x1
y1
a1x a0
其中:
可通过下述方法获得:每一段找出三点
立方程
yi1
ai
x2 i 1
yi1 ai xi21
bi xi1 bi xi1 ci
ci
yi ai xi2 bi xi ci
(2)把标准输入yi (i=1,2...n)值存储在存储器的某一
单元,把x i 作为存储器中这个存储单元的地址,把对应
的 yi 值作为该单元的存储内容,这样就在存储器里面
建立一张标定数据表。
(地3)址实,际读测出量该时地,址让中微存机储根的据y输i 即出为读对数应x的i 去被访测问量该的存真储值,
等距节点算法适用于非线性特性曲率变化不大的场合,每段曲线都用 一个直线方程代替。分段数n取决于非线性程度和仪表的精度要求。精 度越高,n越大。每段直线的方程为
P1i (x) a1i x a0i , i 1,2,..., n
因为每段的拟合误差 V一i 般都不同,拟合结果应保证
max Vi,max ,i 1,2,..., n
用非等距节点分段直线校正法
a11x a01 P1(x) a12 x a02
a13x a03
0 x a1 a1 x a2 a2 x a3
非等距节点分段直线插值
四、抛物线插值
如图所示将曲线分成四段,每一段都可以用一个二阶抛物线方程
常用非线性校正方法有哪些试举例说明及答案
常用非线性校正方法有哪些试举例说明及答案【篇一:常用非线性校正方法有哪些?试举例说明?及答案?】模块1检测技术的基础知识习题及答案一、填空题 1、传感器静态特性的重要指标是()、()、迟滞性和()。
2、传感器一般由()、()、和()三部分组成。
5、精确度是指传感器的()与被测量()的一致程度。
它反映了传感器测量结果的()程度。
6、噪声一般可分为()和()两大类。
7、根据噪声进入信号测量电路的方式以及与有用信号的关系,可将噪声干扰分为()干扰与()干扰 8、差模干扰又称()干扰、正态干扰、()干扰、横向干扰等。
9、共模干扰又称()干扰、对地干扰、()干扰、共态干扰等。
二、简答题与计算1、直接测量方法有几种?它们的定义是什么?2、仪表精度有几个指标?它们的定义是什么? 3、传感器的静态特性的技术指标及其定义是什么? 4、弹性元件的弹性特性用什么表示?其定义是什么? 5、检定一个 1.5 100ma的电流表,发现在 50ma处绝对误差最大,为 1.4ma ,问该表是否合格? 6、在自动检测系统中,利用多种传感器把各种被测量转换成电信号时,大多数传感器的输出信号和被测量之间的关系并非是线性关系。
要解决这个问题,在模拟量自动检测系统中可采用什么方法? 7、测量仪表静态特性非线性的校正方法有哪些? 8、常见的干扰包括哪些类型? 9、列举在抑制干扰中常用的几种屏蔽技术?答案一、填空题 1、传感器静态特性的重要指标是()、()、迟滞性和()。
正确答案灵敏度、线性度、、精确度2、传感器一般由()、()、和()三部分组成。
正确答案输出变化量、输入变化量 5、精确度是指传感器的()与被测量()的一致程度。
它反映了传感器测量结果的()程度。
正确答案输出指示值、约定真值、可靠 6、噪声一般可分为()和()两大类。
您的答案外部噪声、内部噪声 7、根据噪声进入信号测量电路的方式以及与有用信号的关系,可将噪声干扰分为()干扰与()干扰您的答案 8、差模干扰又称()干扰、正态干扰、()干扰、横向干扰等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最小二乘法原理:
设被逼近函数为f(xi),逼近函数为g(xi),
xi为x上的离散点,逼近误差为 :
V xi f xi g xi
记为 :
V
i 1
n
2
X i
min
实现;为了使逼近函数简单起见,通常选择 多项式。
二、直线拟合
设有一组实验数据如下图所示,现在要求一条最接近于这 些数据点得直线。直线可有很多,关键是找一条最佳直线。 设这组实验数据的最佳拟合方程为:y = a1 x + a0,式中,
其中:
y1 y0 a1 , x0 x1
a0 y0 a1 x0
若(x0,y0)、(x1,y1),取在非线性特性曲线f(x) 或数组的两端点A、B,如下图中的直线表示插值方程, 这种线性插值就是最常用的直线方程校正法
y y1 B y1 L(x) P(x) f(x) y0 0 A x a b y0 0 A a b x f(x) y B
n
i 1
n
2 xi
i 1
n
xi
三、曲线拟合
为了提高拟合精度,通常对n个实验数据对(xi,yi) 选用m次多项式 :
y f x a0 a1 x a2 x am x
2 m
a x
i j 1
m
由此可得如下方程组:
n m j k 2 ( yi a j xi ) xi 0 a k i 1 j 0
i 1, 2 ,, n
计算a0,a1,……,am的线性方程组为 :
m xi xim
x
j
来作为描述这些数据的近似函数关系式(回归方程)。 若把(xi,yi)的数据代入多项式就可得n个方程简记 为:
Vi yi
j 0
m
a j xij ,
i 1, 2,, n
式中,Vi为在xi处由回归方程计算得到的值与测量得到的 值之间的误差。根据最小二乘原理,为求取系数aj的最 佳估计值,应使误差Vi的平方之和最小,即: 2 n n n j 2 yi a0 , a1 ,, am Vi a j xi min i 1 i 1 j 1
1.插值函数的常见形式―― m 次多项式: m
z ( x) Pm ( x)
a x
i i 0
i
2. 插值函数多项式系数的确定
从标定数据中选取 (m+1)组数据作为插值点,解以下 a0 , a1 , a 2 , a m (m+1) 元方程组可求得(m+1) 个多项式系数
一般来说,阶数m越高,逼近 f(x) 的精度越高,但阶数 越高,计算越繁冗,计算时间也会增加,故多项式的阶数 一般不超过三阶。
n
2
i 1
n
xi
n
i 1
n
i 1
a1
i 1
n
xi y i
i 1
xi
i 1 2
yi
将各测量数据 代入方程组, 即可解得回归 方程的回归系 数a0和a1, 从而得到这组 测量数据在最 小二乘意义上 的最佳拟合直 线方程。
非等距节点分段直线插值
四、抛物线插值
如图所示将曲线分成四段,每一段都可以用一个二阶抛物线方程
y ai x2 bi x ci (i 1,2,3,4) 来描绘。其中,抛物线的系数 a , b , c i i i
可通过下述方法获得:每一段找出三点 立方程 2
xi 1 , xi1 , xi
zy
(x x ) y
• 查表法优点:
不需要进行计算或只需简单的计算;
• 查表法缺点:
需要在整个测量范围内标定实验测得很多的测试数据。
4.5.2 插值法 一、插值函数和插值点:
插值法是从标定或校准实验的n对测定数(xi,yi)(i=1,2,…,n)中, 求得一个函数作为实际的输出读数x与被测量真值y的函数关系 的近似表达式。这个表达式 必须满足两个条件:
4.5.1 查表法
查表法就是1,2,...n)在内存中建立一张输入/输出数据表,再根据 A/D数据x通过查这个表查的y,并将查得的y作为显示数 据z。具体步骤如下: (1)在系统的输入端逐次加入一个个已知的标准被测 量 y1 , y2 ...yn ,并记下对应的输出读数 x1 , x2 ,..., xn 。
2 y
i 1
n i
n
i
a0 a1 xi 0
a0 a1 xi 0
2x y
i 1
i
解得:
a0
i 1
n
yi
i 1 n
n
2 xi xi2
i 1 n
n
xi yi xi
常用的校正算法: 查表法
插值法
拟合法
离散数据的获得
• 标定实验
在规定的实验条件下,给测试系统的输入端逐次加入一个个 已知的标准的被测量y1,y2„yn,并记下对应的输出读数(A/D转 换结果)x1,x2„xn。这样就获得n对输入/输出数据(xi,yi), (i=1,2„n)这些“标定”数据就是y=f(x)的离散方式描述。
(2)把标准输入y i (i=1,2...n)值存储在存储器的某一 单元,把 x i 作为存储器中这个存储单元的地址,把对应 的 y i 值作为该单元的存储内容,这样就在存储器里面 建立一张标定数据表。
(3)实际测量时,让微机根据输出读数 x i 去访问该存储 地址,读出该地址中存储的y i 即为对应的被测量的真值, 将从表中查得的y i 作为显示数据 z ,应该说是不存在误 差的。 (4)若实际测量的输出数据x是在x i和xi 1之间,可按最邻 近的一个标准读数 x i或 xi 1去查找对应的y i 或 y i 1作为 被测量的近似值,很显然这个结果有一定的误差,可以 用线性内插进行修正,即按照下式子计算出要显示的数 据 yi 1 yi i i xi 1 xi
Vi pn ( xi ) f ( xi ) , i 1,2,...,n
Vi
表示拟合误差,如果对于所有的x的取值都满足 Vi
ε为允许的拟合误差,则直线方程 就是理想的校正方程。 显然,如果对于非线性比较严重或测量范围比较宽的非 线性特性,采用一种直线方程进行校正很难满足仪表的精 度要求。故
xi
2 i
xim 1
x
a0 m 1 a1 i xi2 m am xim
y x y
i
i i xim yi
由上式可求得m+1个未知数aj的最佳估计值。
(含两端点)联
yi 1 ai xi 1 bi xi 1 ci 2 yi1 ai xi1 bi xi1 ci yi ai xi2 bi xi ci 可以求出 ai , bi , ci
分段插值流程图
4.5.3 拟合法 一、最小二乘法 利用n次多项式进行拟合,可以保证在n+1 个节点上校正误差为零,因为拟合曲线折线恰好经 过这些节点。但是,如果这些实验数据有随机误差, 得到得校正方程并不一定能反映出实际的函数关系。 因此,对于含有随机误差得实验数据的拟合,通常 选择误差平方和的最小这一标准来衡量逼近结果, 这就是最小二乘法原理。
z ( x) 的表达式比较简单,便于计算机处理。 第一, 故一般为多项式。
第二,在所有选定的校准点(也称插值点) 上满足:
zi (x i ) f (x i) y i
满足上式的 z ( x) 称为 y f ( x) 的插值函数。xi为插值 节点
二、插值函数的常见形式及其求解
法 等距节点分段直线校正 线性插值 正法 非等距节点分段直线校
4.5.2.1 等距节点分段直线校正发
等距节点算法适用于非线性特性曲率变化不大的场合,每段曲线都用 一个直线方程代替。分段数n取决于非线性程度和仪表的精度要求。精 度越高,n越大。每段直线的方程为
P1i ( x) a1i x a0i , i 1,2,...,n
例,已知热敏电阻的阻值R(kΩ)与温度t(℃)的关系式如 表4-5-1所示
三、线性插值
线性插值是从一组数据(xi,yi)中选取两个代表性的 (x0,y0)、(x1,y1),然后根据插值原理,求出插值 方程 :
x x0 x x1 p1 ( x) y0 y1 a1 x a0 x0 x1 x0 x1
四、最佳一致逼近法
插值法要求逼近函数z=φ(x)与被逼近函数y=f(x)在节点上有相同的函 数值,而在非节点处φ(x)就不一定保证很好的逼近函数f(x) ,而实际问题 上要求在整个测量区间上都能够很好的逼近f(x),针对这种情况,我们可 以采用最佳一致逼近法。 最佳一致逼近就是保证 f(x)与φ(x)之间的最大误差小于给定精度 , 既保证不等式成立
a1和a0称为回归系数。
y
x x x x x
x
x
x
x x x x xx x
x
0
x
令:
a
0 , a1
Vi yi a0 a1 xi
i 1 i 1
n
n
2
根据最小二乘原理,要使φa0,a1为最小,对a0,a1求 偏导,令其为0,可得 :
a0
a1
对于曲率变化较大的分线性特性,若要满足精度要求,分段数n就会 变得很大,同时 a1i 和a0的数目也会增加,占用内存增加,故这时宜采 i 用非等距节点分段直线校正法