robotc教程
robotc教程
但希望读者还是事先有一定的了解; z 书中所述难免有错漏,欢迎读者与我们联系来分享你们的建议和意见。 z 请 与 本 书 作 者 韦 文 潮 联 系 ( 电 子 邮 件 : wwc4677@ ) 或 登 陆 西 觅 亚 网 站
{ motor[motorC] = 100 ; wait1Msec(3000) ;
} 你也可以在“File(文件)”菜单的“Open Sample Program(打开示例程序).”在 “Training Samples(练习 示例)”文件夹中找到 “MotorC Forward.(C马达前进)”程序。
保存的名字为“Movement”。
13
现在添加一行命令将B马达以100的功率打开(第5行)。 现在下载这个程序,依次点击“Robot”Æ“Compile and Download Program(编译并下载程序)”
14
一旦程序下载完毕,Robot C的调试窗口就会出现。点击“Start”按钮运行程序。
-3-
我们建议大家购买正版软件以获得更好的服务。 随后出现的提示窗口告诉大家在没有程序被编译的情况下,某些菜单功能是不可用的。
Robot C 的界面非常简洁,在窗口左侧是函数模板,右侧的空白区域就是编写代码的位置。需要提醒的是 Robot C 提供了智能菜单,就是说当你键入几个字母后,系统会自动给出相应函数的完整拼写,同时你也 可以直接从左边的模板拖放到右边的区域来添加代码。
- 10 -
2.3.1 前进 这一节里你将学会如何让机器人完成前进的动作,以及如何通过调整时间来达到调整动作的目 的。 在上一章节里,你下载了一个示例程序让机器人的作出转弯的动作。你是不是觉得好奇,为什 么机器人能够转弯呢?你将完全弄明白它的道理并且编写程序让机器人作出前进的动作。 程序剖析 第1行: task main()
robomaster开发板 c 型例程-概述说明以及解释
robomaster开发板c 型例程-概述说明以及解释1.引言1.1 概述概述Robomaster开发板C型是一款专为Robomaster机器人比赛设计的开发板,具有强大的性能和丰富的功能,可用于控制机器人的各种操作和任务。
本文将介绍Robomaster开发板C型的特点和设计理念,同时深入探讨其例程设计和应用,帮助读者更好地了解和使用这款开发板。
通过本文的阐述,读者将能够全面了解Robomaster开发板C型的功能和优势,为其在Robomaster比赛中的应用提供参考和指导。
1.2文章结构1.2 文章结构本文分为三个主要部分:引言、正文和结论。
在引言部分,将对Robomaster开发板C型进行概述,并解释文章的结构和目的。
在正文部分,将详细介绍Robomaster开发板C型的特点和功能,设计相应的例程,并展示其在实际应用中的效果。
在结论部分,将对整篇文章进行总结,展望Robomaster开发板C型的未来发展,并结束文章。
整体结构清晰,内容连贯,旨在全面展示Robomaster开发板C型的应用价值和潜力。
1.3 目的:本文旨在介绍Robomaster开发板C型的基本功能和特点,以及设计和应用相应的例程。
通过深入了解该开发板的硬件和软件结构,读者可以更好地理解如何利用Robomaster开发板C型实现自己的项目和创意。
此外,通过学习例程设计和应用,读者可以掌握如何使用Robomaster 开发板C型进行编程和控制,从而拓展自己的技术能力和实践经验。
最终,希望本文能够帮助读者更好地理解和应用Robomaster开发板C型,促进智能机器人教育和研究的发展。
2.正文2.1 Robomaster开发板C型介绍:Robomaster开发板C型是一款针对教育机器人开发而设计的硬件平台。
该开发板具有高性能的处理器和丰富的接口,适用于教学、研究和开发等不同领域的应用。
它采用了先进的嵌入式系统架构,配备了丰富的外设接口,支持多种通信协议,可以方便地搭建机器人控制系统。
ER3A-C60系列机器人编程手册20150701v1.1

埃夫特
修订记录 V1.0 v1.1
C60控制系统
2014.09.08 2015.06.08
- 编程手册 - 电气手册 - 机械手册
安徽埃夫特智能装备有限公司
目录
第一章 基本安全预防措施................................................................................................1 1.1 安全责任................................................................................................................1 1.2 安全预防措施........................................................................................................1 1.2.1 目的..........................................................................................................1 1.2.2 定义..........................................................................................................1 1.2.3 适用范围..................................................................................................2
ROBOT操作入门

ROBOT操作入门ROBOT操作入门1. 简介ROBOT(Remote Open Bionics Operating System)是一种远程操作的操作系统。
它提供了丰富的功能和灵活的操作方式,使用户能够轻松地控制和操作。
本文档将介绍ROBOT的基本操作入门,帮助读者快速上手。
2. 安装ROBOT要开始使用ROBOT,需要将其安装在您的操作系统上。
以下是安装ROBOT的步骤:1. ROBOT安装包:您可以从ROBOT官方网站最新的ROBOT安装包。
2. 解压安装包:将的安装包解压到您选择的目标文件夹中。
3. 配置环境变量:打开终端或命令提示符,将ROBOT安装路径添加到您的系统环境变量中。
完成上述步骤后,ROBOT就已经成功安装在您的系统中了。
3. 连接ROBOT在开始操作ROBOT之前,您需要先将ROBOT与您的设备进行连接。
以下是连接ROBOT的步骤:1. 打开ROBOT控制面板:在您的设备上启动ROBOT控制面板。
2. 选择连接方式:ROBOT支持多种连接方式,包括USB连接和Wi-Fi连接。
根据您的实际情况选择合适的连接方式。
3. 输入连接信息:根据选择的连接方式,输入相应的连接信息,如IP地质、端口号等。
完成上述步骤后,ROBOT就会与您的设备成功连接。
4. 控制ROBOTROBOT提供了多种方式来控制的运动和操作。
以下是一些常用的控制方式:4.1. 通过控制面板控制ROBOT的控制面板提供了直观的可视化界面,可以通过按钮、拖动滑块等方式来控制的动作。
您可以根据的实际情况选择相应的动作和控制方式。
4.2. 通过命令行控制ROBOT还支持通过命令行来控制。
您可以使用命令行工具,发送指令给ROBOT控制系统,实现的运动和操作。
以下是一些常用的命令行指令:- `robot.move(forward)`: 使向前移动。
- `robot.move(backward)`: 使向后移动。
- `robot.turn(left)`: 使向左转向。
图形化编程平台Robot 学生版使用手册
图形化编程平台Robot学生版使用手册紫光机器人编程软件Robot学生机器人版采用流程图模式编程。
流程图由基本模块来构建,基本模块包括输出执行模块、信号输入模块、流程控制模块三部分,每一个图形模块都可以完成一定的功能,只要按逻辑连接这些模块可以很快的完成一个程序的编写,通过画流程图的方式,实现对某一特定机器人的编程。
从而使机器人根据周围的环境执行相应的动作,如:前进、后退、拐弯、加速、减速等。
流程图支持全局变量、简单表达式、复合条件判断、循环等。
软件采用了面向对象的程序设计方法,每种控件作为一个类对象,描述了此控件的类型、位置、连接属性、节点的设置属性等信息以及对各种属性改变的方法。
利用这些方法,可以方便的对每个节点对象的属性更新和对象位置的移动等各种操作。
软件特点:☆ 图形化编程,直观、易于学习和操作;☆ 编辑、编译、程序下载到主控芯片的集成开发环境;☆ 屏蔽软硬件接口部分,降低偏向于硬件的嵌入式系统开发难度;☆ 可扩展性强。
Robot学生版软件使用说明一、软件安装:二、启动程序:首先,点击“开始”→“程序”→“教育机器人开发平台”→“学生机器人”。
出现如下界面:大约5秒钟左右,程序界面跳转,进入软件界面,如下图(在出现上图后,点击此图,可迅速进入软件界面,无需等待)。
三、新建程序:点击“文件”→“ 新建”(如下左图)或直接点击工具栏上的“新建”图标(下右图),创建一个新程序。
界面转换进入程序编写,各区域功能如下图所示。
四、系统设置:系统设置包括传感器设置和通信方式设置。
通信方式设置用于选择程序的下载方式,如选择串口下载,请正确选择与下载线连接的电脑串口号。
传感器设置用于配置通道号和传感器的对应关系。
编程中如需使用传感器,必须首先在系统设置中设置相应传感器的通道和类型。
五、加载图形控件:首先从控件库中选择所要的控件类型,然后单击所要使用的某个控件,此时鼠标将变成一个“+”形状,然后在工作区单击就可以生成一个该控件类型的节点,同时在其下方显示一个红色的小方框,表示另一个节点可以和它相连,当一个节点移动到它附近(上或下)时,就可以将他们连接起来(连线不需要用户自己画,而由程序自动生成并调整他们的相对位置),如图所示。
robotic+toolbox+使用说明

robotic+toolbox+使用说明robotic toolbox for matlab工具箱1. PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。
其中link函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。
另外LINK还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限[min max]LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.T c %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot的一个副本ROBOT(robot, LINK) %用LINK来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK来创建一个机器人对象ROBOT(DH, ...) %用D-H矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN矩阵来创建一个机器人对象2.变换矩阵利用MATLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。
Robot C简介文档
Robot C 简介文档一、Robot C介绍1,编程语言:类C语言2,程序设计软件:Robot C二、选用Robot C1,文本编写(文字菜单编辑);调试程序(最大限度实时);良好支持(多任务、多媒体、蓝牙等)。
2,体积小巧(硬件配置要求低);界面朴素(便于集中注意力)。
3,便捷直观(F5键:编译与下载;自动出现调试窗口)。
Robot C入门一、固件下载1,固件:机器人的操作系统(计算机与机器人进行交互)2,进入安装目录选择固件,例如D:\Program Files\Robomatter Inc\ROBOTC Development Environment\Firmware二、程序下载1,下载Files—--------Open Sample Program-------Training Samples—MotorCycle Forward2,前进程序剖析:task man()//程序主体{motoc[motocC]=100; //C马达功率为100waitMsec(3000); //程序等待3000毫秒}3,关于马达功率:(1)-100(全速后退)和100(全速前进)(2)电池电量饱和,摩擦阻力小,最快速度为每秒1000个编码器计数。
通常是最大速度是750个计数点。
4,关于滑动与制动task main(){motor[motorC]=100;motor[motocB]=100;waitMsec(2000);motor[motorC]=0; //C马达输出功率为0motoc[motorB]=0; //B马达输出功率为0}5,非全速动力6,后退运动7,反向运动三、传感器1,触碰传感器:通过触点告诉机器人是否接触到物体。
2,光电传感器:发射红外线,将接收到的光值返回给机器人,通过光值的大小和程序,进行颜色、距离等条件的估算。
3,声音传感器:识别声音强度,而非声音内容。
4,超声波传感器:间断地发射超声波并检测反射回来的超声波获知前方物体的距离。
图形化编程平台Robot 学生版使用手册.
图形化编程平台Robot学生版使用手册紫光机器人编程软件Robot学生机器人版采用流程图模式编程。
流程图由基本模块来构建,基本模块包括输出执行模块、信号输入模块、流程控制模块三部分,每一个图形模块都可以完成一定的功能,只要按逻辑连接这些模块可以很快的完成一个程序的编写,通过画流程图的方式,实现对某一特定机器人的编程。
从而使机器人根据周围的环境执行相应的动作,如:前进、后退、拐弯、加速、减速等。
流程图支持全局变量、简单表达式、复合条件判断、循环等。
软件采用了面向对象的程序设计方法,每种控件作为一个类对象,描述了此控件的类型、位置、连接属性、节点的设置属性等信息以及对各种属性改变的方法。
利用这些方法,可以方便的对每个节点对象的属性更新和对象位置的移动等各种操作。
软件特点:☆图形化编程,直观、易于学习和操作;☆编辑、编译、程序下载到主控芯片的集成开发环境;☆屏蔽软硬件接口部分,降低偏向于硬件的嵌入式系统开发难度;☆可扩展性强。
Robot学生版软件使用说明一、软件安装:二、启动程序:首先,点击“开始”→“程序”→“教育机器人开发平台”→“学生机器人”。
出现如下界面:大约5秒钟左右,程序界面跳转,进入软件界面,如下图(在出现上图后,点击此图,可迅速进入软件界面,无需等待。
三、新建程序:点击“文件”→“ 新建”(如下左图或直接点击工具栏上的“新建”图标(下右图,创建一个新程序。
界面转换进入程序编写,各区域功能如下图所示。
四、系统设置:系统设置包括传感器设置和通信方式设置。
通信方式设置用于选择程序的下载方式,如选择串口下载,请正确选择与下载线连接的电脑串口号。
传感器设置用于配置通道号和传感器的对应关系。
编程中如需使用传感器,必须首先在系统设置中设置相应传感器的通道和类型。
五、加载图形控件:首先从控件库中选择所要的控件类型,然后单击所要使用的某个控件,此时鼠标将变成一个“+”形状,然后在工作区单击就可以生成一个该控件类型的节点,同时在其下方显示一个红色的小方框,表示另一个节点可以和它相连,当一个节点移动到它附近(上或下时,就可以将他们连接起来(连线不需要用户自己画,而由程序自动生成并调整他们的相对位置,如图所示。
机器人程序设计(C语言)【ch02】最简单的C程序设计--机器人做算术 培训教学课件
受到表示小数位的位数限制,float型数据的小数部分只能接受7位有效数字,所 以第一个123456.789数字的最后两位小数不起作用,最后就显示123456.8。
而在a=123456.789e5时,也是因为小数部分的有效数字是7位,加20的运算根 本体现不出。
为了提高浮点数的表示精度,还可以定义双精度浮点数(double)和长双精度浮点 数(longdouble)。
将项目编译、连接、生成执行代码,下载并运行,查看输出结果是否与图2-1一样。
RobotComputation.c是如何工作的
C语言用关键字int定义整型变量。int是英文单词integer(整数)的前三个 字母。
变量的定义
在程序执行过程中,其值可改变的量称为变量。 它们与数据类型结合起来分类,可以分为整型变量、浮点变量、字符变量等。
前面各例printf()函数中用到的“\n”就是一个转义字符,其意义是“回车换行”。
转义字符
通常使用转义字符表示用一般字符不便于表示的控制代码,如用于表示字符常量 的单引号(')、用于表示字符串常量的双引号(")和反斜杠(\)等。
表2-4给出了C语言中常用的转义字符。
转义字符
广义地讲,C语言字符集中的任何一个字符均可用转义字符来表示。表中的 “\ddd”和“xhh”正是为此而提出的。
字符变量
编写如下程序,编译、连接,生成可执行文件,下载执行,看看运行结果是否同 所预计的一样。
#include<uart.h> int main(void) char a,b,h;uart_init();a=97;b=98; printf("%c %c\n",a,b);printf("%d %d\n",a,b); while(1);
RobotStudiu5.15基础教程

王凯锋
Basics
Exploring RobotStudio
2、设置RS工程文件夹
在RS下“文件”选卡中点击 2、浏览选择 课件存放 目录
1、点击文件 与文件夹 选项
3、确定完成
王凯锋
Basics
Exploring RobotStudio
王凯锋
Basics
Creating a basic station
2、添加一个工具
1、选择“导入库文件”,选择 “Cousreware通道”
2、选择工具“Pen”
3、拖动工具到机械手 中或者右键点“安装到” 4、弹出对话框点击 “是”
小测验:在工作站中,添加一个控制柜。
王凯锋
Basics
Creating a basic station
3 1
王凯锋
Basics
Programming the basic station
1、手动运动机械人
关节运动 线性运动
重定向运动
王凯锋
Basics
Programming the basic station
2、建立工件坐标
点击“其它” 选择“创建工 件坐标系”
1点和2点确定X方向 3点确定Y方向 Z方向向上
用鼠标对工具进行捕捉重心
王凯锋
本章结束 谢谢大家
选中要同步的项目
选中”仿真“标签,选择”仿真设定”
王凯锋
Basics
Programming the basic station
8、添加一个Home位
小测验:为现有程序添加一个Home位置
王凯锋
ROBOT操作入门

ROBOT操作入门1. 简介ROBOT是一种强大的自动化测试框架,它可以模拟鼠标和键盘操作,帮助人们实现自动操作任务。
本文将介绍ROBOT操作的基本知识和入门技巧。
2. 安装ROBOT要开始使用ROBOT,需要先安装它。
ROBOT是基于开发的,需要确保已经安装好环境。
1. 打开命令行工具,输入以下命令安装ROBOT:pip install robotframework2. 等待安装完成后,输入以下命令验证ROBOT是否成功安装:robot --version如果显示ROBOT的版本号,则表示安装成功。
3. 编写ROBOT测试脚本SettingsDocumentation 这是一个测试脚本的简单描述Library SeleniumLibraryVariables${URL}${BROWSER} chromeTest Cases打开网页Open Browser ${URL} ${BROWSER}Maximize Browser Window搜索关键字Input Text id=search_input ROBOT操作搜索按钮Click Element id=search_button在上面的示例中,使用了`Settings`和`Variables`定义了一些全局设置和变量。
然后,定义了两个`Test Cases`,分别用于打开网页、搜索关键字和搜索按钮。
4. 运行ROBOT测试脚本要运行ROBOT测试脚本,需要使用ROBOT的命令行工具。
在命令行中输入以下命令:robot path/to/your/test_script.robot其中,`path/to/your/test_script.robot`是你的测试脚本的路径。
运行完成后,ROBOT会测试报告和日志文件。
可以通过浏览器打开测试报告查看测试结果。
5. ROBOT常用操作ROBOT提供了丰富的关键字,可以用于模拟各种操作,包括、输入文本、选择下拉框等。
机器人教程
流程控制模块——If模块If语句与if-else语句if——“如果,假如”;else——“否则”。
在C语言中,if语句测试一个特定的条件。
如果该条件为真(即条件成立),一条或一组指令将被执行;否则,这一条或一组指令将不被执行。
if-else语句测试一个特定的条件。
如果该条件为真(即条件成立),执行if所指向的某一条或一组指令;否则,将执行else语句指向的某一条或一组指令。
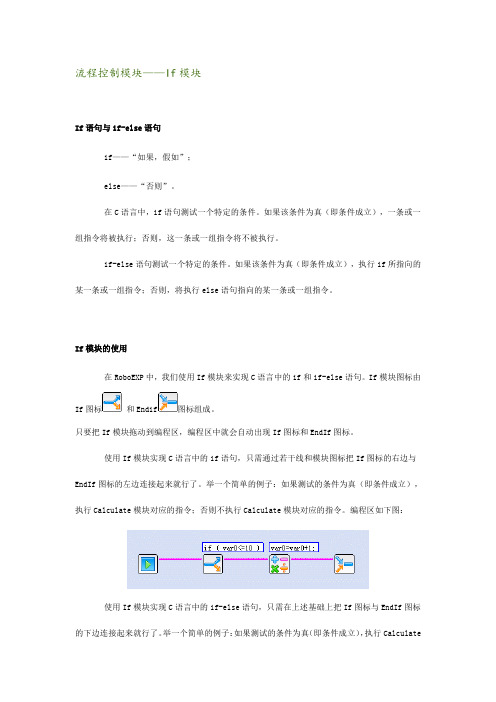
If模块的使用在RoboEXP中,我们使用If模块来实现C语言中的if和if-else语句。
If模块图标由If图标和Endif图标组成。
只要把If模块拖动到编程区,编程区中就会自动出现If图标和EndIf图标。
使用If模块实现C语言中的if语句,只需通过若干线和模块图标把If图标的右边与EndIf图标的左边连接起来就行了。
举一个简单的例子:如果测试的条件为真(即条件成立),执行Calculate模块对应的指令;否则不执行Calculate模块对应的指令。
编程区如下图:使用If模块实现C语言中的if-else语句,只需在上述基础上把If图标与EndIf图标的下边连接起来就行了。
举一个简单的例子:如果测试的条件为真(即条件成立),执行Calculate模块对应累加1的指令;否则执行Calculate模块对应累加2指令。
编程区如下图:与C语言的if和if-else语句相似,If模块所测试的特定条件是一个逻辑运算或比较运算的表达式(条件表达式),其运算结果只有真和假两种。
与C语言一样,在RoboEXP中用1表示真,0表示假。
If模块的运算符:If模块中用到的运算符有比较运算符和逻辑运算符。
在RoboEXP中,用到的算术运算符有五种:+、-、*、/、%,用到的比较运算符有六种:<、<=、>=、>、==、!=,用到的逻辑运算符有两种:逻辑与&&、逻辑或||。
这些运算符的使用与C语言相同,详情如下表:运算结果X + Y计算X和Y的和X -Y计算X和Y的差X * Y计算X和Y的积X / Y计算X和Y的商注:如果两个数都是整数,那么“/”表示的是整除的意思,即只保留运算结果的整数部分而舍弃小数部分。
工业机器人GR-C控制系统操作说明书

——使用者应通过产品安全操作的学习和培训,并熟悉和掌握安全操作的内容。 ——使用者应对自己增加、变换或修改原产品、附件后的安全及造成的危险负责。 ——使用者应对未按使用手册的规定操作、调整、维护、安装和贮运产品造成的危险
负责。
III
工业机器人 GR-C 控制系统 操作说明书
诚挚的感谢您——在使用广州数控设备有限公司的产品时, 对本公司的友好支持!
2.3.1 示教盒的外观 ....................................................................................................................... 4 2.3.2 按键操作 ............................................................................................................................... 5 2.3.3 按键的功能 ........................................................................................................................... 6 2.4 示教盒画面显示......................................................................................................................... 12 2.4.1 快捷菜单区 ......................................................................................................................... 13 2.4.2 系统状态显示区 ................................................................................................................. 16 2.4.3 主菜单区 ............................................................................................................................. 19 2.4.4 文件列表区 ......................................................................................................................... 19 2.4.5 人机接口显示区 ................................................................................................................. 20 2.5 软键盘 ........................................................................................................................................ 20 2.6 输入数值 .................................................................................................................................... 22
ABB工业机器人编程基础操作

ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
程序举例
程序开始运行时,机器人末端工具以500mm/s的速度移 至phome点位置待机;
待机状态下,当信号di1由0变为1时,机器人开始运动 ,末端工具运动速度为1000mm/s,运动轨迹为画一个 以p10点为圆形,半径为200mm的圆,运动完成后,机 器人末端工具以500mm/s的速度返回phome点位置待机 。
MoveL p10, v1000, fine, tool1\Wobj:=wobj1; MoveC p30, p40, v1000, z1, tool1\Wobj:=wobj1;
MoveC指令解析
ABB工业机器人编程基础操作
5.2.3 运动指令的使用示例
ABB工业机器人编程基础操作
运动速度一般最高为50000mm/s,在手动限速状态下,所有的 运动速度被限速在250mm/s。fine指机器人TCP达到目标点,在目 标点速度降为零。工业机器人动作有所停顿然后再向下运动,如 果是一段路径的最后一个点,一定要为fine。转弯区数值越大, 机器人的动作路径就越圆滑与流畅。
现以传感器的信号进行实时监控为例编写一个中断程序: 1、在正常情况下,di1的信号为0. 2、如果di1的信号从0变成1,就对reg1数据进行加1的操作。 操作步骤如下:
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
ABB工业机器人编程基础操作
Abs操作步骤如下:
ABB工业机器人编程基础操作
功能Offs的作用是基于目标点在XYZ方向的偏移。 如:“P40:=OFFS(P30,150,230,300)”是指p40相对于p30点在X 方向偏移150mm,Y方向偏移230 mm,Z方向偏移300 mm。 Offs操作步骤如下:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-7-
2.2 如何下载程序 现在一切准备就绪了,但是你的机器人还缺点什么呢?……啊,对了!程序。 如果你想你的机器人动起来就必须给他下载程序。下载程序的意思就是将你所希望的命令从计算机下载到 机器人。在这一小节里你将学会如何给机器人下载程序。 Type in this first program.* 首先在 Robot C 的命令行区域输入下列代码。 task main()
{ motor[motorC] = 100 ; wait1Msec(3000) ;
} 你也可以在“File(文件)”菜单的“Open Sample Program(打开示例程序).”在 “Training Samples(练习 示例)”文件夹中找到 “MotorC Forward.(C马达前进)”程序。
11
第2~7行: Braces 第3行: motor[motorC] 第4行: wait1Msec
每一个 ROBOTC 程序都包含 着一个 task main(),意思是“任 务 主要()”,它通常作为程 序的主体。
任务的内容由一对大括号构 成和它们之间的代码构成。
第 4 行的语句将 C 马达的功率 设置为 100。
- 10 -
2.3.1 前进 这一节里你将学会如何让机器人完成前进的动作,以及如何通过调整时间来达到调整动作的目 的。 在上一章节里,你下载了一个示例程序让机器人的作出转弯的动作。你是不是觉得好奇,为什 么机器人能够转弯呢?你将完全弄明白它的道理并且编写程序让机器人作出前进的动作。 程序剖析 第1行: task main()
z 需要更丰富的 NXT 功能控制的项目开发者; z 熟练掌握了乐高机器人技术,希望尝试新鲜的技术的学生; z 希望了解学习机器人技术的研究者; 1.1.3 说明 z 本书的内容主要服务于 NXT,因此我们不会在书中讲解有关 RCX 的情况; z 本书中会使用“RCX 时代”和“NXT 时代”这样的词语来表示两种不同类型的器材及其所附属的
-4-
下面,就让我们一起进入 Robot C 的编程世界吧!
第二章 入门
2.1 如何下载固件 现在你的Robot C已经安装完毕并且机器人也搭建好了。但是你还不能让机器人与计算机进行交流。你还需 要下载固件。 固件,相当于机器人的操作系统。它能让使用者和计算机跟机器人进行交互。 必备条件: 1. 你的NXT机器人; 2. 你的计算机已经安装了Robot C; 3. 一条USB连接线。 用USB线将机器人与计算机连接起来,确保机器人已经开机了。
12
第5行是一个“Wait For”等待语句,其中wait1Msec.的“M”是指毫秒的意思。也就是说这个语句的 作用是让程序等待一段时间,单位是毫秒,所以wait1Msec(3000)的意思就是等待3 = 马达功率; 现在我们要在这个程序的基础上进行编写后面的程序。首先将它另外保存。
我们常见的传感器有: 触碰传感器:通过触点告诉机器人是否接触到物体;
-5-
依次点击菜单“Robot”Æ“NXT Brick” Æ “Link Setup” 在左上角是你的NXT的名称和硬件地址。选中它然后点击下载固件按钮“F/W Download”。
-6-
在出现的对话框中依次选择“我的计算机” Æ “C盘” Æ “Program Files” Æ “Robotics Academy” Æ “RobotC” Æ “firmware”。选择其中的固件文件(.rfw),然后点击“open”。
软硬件环境; z 在高级应用的章节中涉及一些有关电子技术或者程序设计的理论和概念,我们会尽量讲得通俗,
但希望读者还是事先有一定的了解; z 书中所述难免有错漏,欢迎读者与我们联系来分享你们的建议和意见。 z 请 与 本 书 作 者 韦 文 潮 联 系 ( 电 子 邮 件 : wwc4677@ ) 或 登 陆 西 觅 亚 网 站
16
这两句命令让马达在停止后不会滑行。 现在重复前面的步骤下载并运行程序,观察一下机器人的动作有什么变化。 2.3.4 非全速动力
17
你将通过这个练习学会设置非全速的马达动力。这在运动精度要求比较高的时候会非常有用的。 让马达前进的功率范围是0到100。它的中点是多少? 100 / 2 = 50 结果是50,那么我们将马达前进的命令修改为50。
上面是安装正在进行,这个过程会有 1 分钟左右,这取决于你的计算机的速度。
-2-
安装结束后点击“Finish”,完成安装。 接下来我们选择最桌面上的 Robot C 程序快捷方式,进入软件界面。 下图软件的初始界面。
点击中央的窗口,会接着出现下面的注册窗口。它提供了两种选择:激活软件和进行 30 天试用。如果你 选择的是试用,那么在每次进入该软件时都会出现本窗口提示激活。请购买正版软件并登陆该软件官方网 站/进行激活。
现在重复前面的步骤下载并运行程序,观察一下机器人的动作有什么变化。 你一定注意到了机器人比之前运动得慢了。你可以尝试将这个值修改成 0 到 100 之间的任何值,观察效果。 2.3.5 转弯和后退 我们现在来尝试将马达反向运动。 将前进命令修改为全速。
这一段命令让马达全速前进2秒。
18
我们将这一段命令复制一次,粘贴在下面,然后将C马达的值修改为-100,等待值为8秒。
-3-
我们建议大家购买正版软件以获得更好的服务。 随后出现的提示窗口告诉大家在没有程序被编译的情况下,某些菜单功能是不可用的。
Robot C 的界面非常简洁,在窗口左侧是函数模板,右侧的空白区域就是编写代码的位置。需要提醒的是 Robot C 提供了智能菜单,就是说当你键入几个字母后,系统会自动给出相应函数的完整拼写,同时你也 可以直接从左边的模板拖放到右边的区域来添加代码。
保存的名字为“Movement”。
13
现在添加一行命令将B马达以100的功率打开(第5行)。 现在下载这个程序,依次点击“Robot”Æ“Compile and Download Program(编译并下载程序)”
14
一旦程序下载完毕,Robot C的调试窗口就会出现。点击“Start”按钮运行程序。
这一段命令让C马达全速后退,B马达全速前进。 别忘记这段命令能够让马达立即停止而不会滑行。 现在重复前面的步骤下载并运行程序,观察一下机器人的动作有什么变化。
2.4 使用传感器
在学习了如何对机器人进行基本的控制后,我们接下来就让机器人更聪明一些。 对于机器人来说,外界环境是完全一片空白,要想感知周围的事物,我们必须给机器人安装传感器。
1.1.1 为什么要使用 Robot C 读者们一定会问:在今天,我们拥有如此众多的机器人程序设计软件,我们为什么选择 Robot C 而不 是其他的呢? 的确,得益于乐高平台的开放性,我们能够在网络上找出超过一打的各式各样的软件来为我们手中的 NXT 机器人编写程序。那么我们为什么要建议大家使用这款软件呢?下面是我们列举的几个我们认为是优 势的地方: z 功能齐全 Robot C 拥有编写和调试文本程序的所有功能,和成熟的机器人程序设计调试工具的优点。在文本编辑 方面它具备完整的文字编辑菜单、C 语言的数组边界检查等功能;在调试方面,它能将 NXT 上几乎每一 个细节都展示出来,并给予用户最大限度的实时调试功能。另外,在 NXT 的多任务、多媒体、蓝牙等新 特性方面提供了良好的支持,用它你可以做出令自己意想不到的效果。 z 体积小巧 它的界面简洁朴素,没有华丽眩目的皮肤(喜欢经常给软件界面换肤的读者要失望了),没有花俏的窗 口效果。只有简单而且必要的但完全足够使用的功能菜单。这非常的节省资源。这样的软件即使在 5 年前 甚至更早以前购置的 PIII500M 的 CPU 和只有 128M 内存的台式计算机或者笔记本计算机都能够轻松的运 行它。 z 便捷直观 它将编译和下载功能融合在一个 F5 快捷键上。在下载完程序后自动出现的调试窗口可以迅速直观的向 您展示程序运行的内部情况。
点击“Start”按钮运行程序,机器人 会立刻动起来。 2.3.2 定时 这一节将介绍如何调整机器人前进的时间长度。 我们将第6行的3000修改为2000。然后保存文件。
15
现在重复前面的步骤下载并运行程序,观察一下机器人的动作有什么变化。 然后你可以自己试着将时间修改成其他的值来观察效果。 速度和方向 这一小节里你将继续学习如何操纵机器人动作的速度和方向。 我们继续进行马达功率的研究。我们知道马达的功率值设定能够让它快、慢或者停止。功率的 取值范围从-100(全速后退)到100(全速前进)。当你的NXT电池充满了,并且机器人运动的 摩擦阻力比较小的时候,马达最快速度大约是每秒1000个编码器计数。 但是通常情况下,NXT电池并不完全充满,而机器人的摩擦阻力也比较大。那么这样的情况下, 这个值大约会下降到750个计数点。也就是说,当你在程序中将马达功率设置为100时,它会向 前运动每秒750点。 2.3.3 滑行和制动 在机器人停止下来后它会因为惯性继续滑行一段距离。为了避免这样的情况,你得在后面添加 上停止的命令。 添加马达速度控制的命令,将B和C都设置为0。
1.1.2 什么样的读者应该使用 Robot C 我们并不建议给年龄太小的读者使用本书和这个软件,尽管它是一个非常棒的软件。 因为我们假定读者具备下列的条件,才具备了灵活掌握 Robot C 的能力: z 基本的英语书写阅读能力; z 具备基本的上网和操作 WINDOWS 的能力; z 有过编写 C 语言程序的经历; z 年龄最好在 10 岁以上; 当然,这些条件都不是绝对的,任何相信自己能力的话,我们都建议尝试使用这个软件。 如果你属于下列这些人的话,那你一定会非常需要本书和 Robot C:
第一部分:RobotC 编程入门
1.1 Robot C 介绍
第一章 初识 Robot C