山药收获机建设方案
山药机械化收获技术及其发展

山药机械化收获技术及其发展1. 引言1.1 山药机械化收获技术及其发展概述山药是一种重要的经济作物,在我国广泛种植。
山药的收获一直以来都是一个辛苦且耗时的工作,传统的手工收获方式已无法满足现代农业的需求。
山药机械化收获技术的发展变得尤为重要。
随着农业机械化水平的不断提高,山药机械化收获技术也得到了较快的发展。
机械收获能够提高山药的收获效率,减轻人工劳动强度,降低劳动成本,提高产量和质量稳定性,同时也可以减少对土壤的损伤,对环境友好。
目前,山药机械收获技术主要包括山药收获机械、山药收获机器人等。
这些技术不断创新与完善,为山药种植业的发展带来新的动力和机遇。
本文将就山药机械化收获技术的应用现状、发展历程、关键技术、发展趋势和未来展望进行详细探讨,以期为相关研究和实践提供参考和借鉴。
山药机械化收获技术的不断发展将推动山药产业的现代化转型,提高山药产量和品质,促进农业经济的健康可持续发展。
2. 正文2.1 山药机械收获技术的应用现状山药是一种重要的农作物,在中国具有很高的栽培面积和产量。
随着农业现代化的发展,山药的机械收获技术也逐渐成熟。
目前,山药机械收获技术在农业生产中得到广泛应用。
山药机械收获技术的应用现状主要体现在收获效率的提高。
传统的山药收获方式主要依靠人工操作,效率低下且劳动强度大。
而引入机械化收获技术后,可以大大减少人工成本,提高收获效率。
目前市场上已经出现各种类型的山药收获机械,包括挖掘机、收获机等,可以实现全自动收获作业。
山药机械收获技术的应用现状也体现在减少农药残留。
传统的山药收获方式往往需要喷洒大量农药来防治病虫害,使山药表面残留有害物质。
而机械收获技术可以精准地控制收获的时间和方式,减少对农药的依赖,降低残留量,保障山药的质量和安全。
山药机械收获技术的应用现状已经取得了显著成效,为山药生产带来了新的发展机遇。
随着技术的不断进步和农机设备的更新换代,山药机械收获技术将会逐步完善和普及,为山药产业的发展注入新的活力。
山药机械化收获技术及其发展
山药机械化收获技术及其发展1. 引言1.1 背景介绍山药是一种重要的经济作物,具有很高的营养价值和药用价值。
在中国,山药的种植历史悠久,是广大农民的重要经济来源。
由于山药种植工作大多依靠人工,劳动强度大,生产效率较低,且容易受到气候和人力资源等因素的限制。
为了解决山药种植中存在的问题,提高生产效率,节约人力成本,促进山药产业的发展,山药机械化收获技术应运而生。
通过引入机械收获设备和技术,可以实现山药的自动化收获,提高采收效率,减少劳动强度,降低生产成本,促进山药产业的现代化发展。
深入研究山药机械化收获技术及其发展具有重要的现实意义和发展价值。
本文旨在探讨山药机械化收获技术的现状和发展趋势,分析机械化收获对山药种植业的影响,探讨应用山药机械化收获技术的益处,旨在为山药产业的发展提供参考和借鉴。
1.2 研究目的本文旨在探讨山药机械化收获技术的发展现状及趋势,分析机械化收获对山药种植业的影响,并探讨应用山药机械化收获技术的益处。
通过深入研究山药机械化收获技术,旨在为山药种植业的发展提供理论支持和实践指导,推动山药产业向现代化、可持续发展的方向迈进。
通过总结山药机械化收获技术的推广价值和未来发展方向,为相关研究和实践工作提供参考,促进山药产业更好地适应市场需求和提高生产效率。
通过本文的研究,旨在为山药产业的健康发展和现代化转型提供有益的思路和建议。
2. 正文2.1 山药及其重要性山药,又称土豆蕃荔,为多年生薯类植物,是一种常见的蔬菜和药用植物。
山药富含淀粉、蛋白质、维生素和微量元素,具有补脾益肺、助消化、增强免疫力等功效。
在中医中,山药被用来治疗脾胃虚弱、慢性咳嗽、肺痨等疾病,被誉为“长生果”。
山药在农业生产中也具有重要地位。
山药适应性强,能在贫瘠土壤和气候条件下生长,是一种适合大面积种植的作物。
山药的收获季节长,一般在秋季或初冬进行收获,收获后能够进行贮藏,保鲜期较长。
山药种植对农村经济发展和农民增收起到积极作用,被广泛种植和推广。
GD1型山药收获机设计
GD1型山药收获机设计摘要GD1型山药收获机由于结构简单、巧妙、合理,可以完成机械化的收获作业,效率可以提高几十倍,可以大大普及推广深土经济农作物的种植,提高农民的经济效益。
本次设计对传统的农用机械的提升部分有所改进,使其工作部分能够垂直升降,达到精准快速收获山药的目的。
首先,本文对传统的山药收获方式进行了论述,并详细阐述了此山药收获机的工作原理。
其次,本文对山药收获机的齿轮传动部分,垂直提升部分,空心螺旋钢片轴此三部分进行论述。
最后,本文对山药收获机各部分设计的计算过程进行的详细阐述。
关键词:齿轮传动部分,垂直提升部分,空心螺旋钢片轴The design of yam harvest machine GD1AbstractThe structure of Yam harvest machine GD1 is simple,clever,rational.Mechanized harvesting operations can be completed, its efficiency can be improved several times.The planting of deep soil economic crops can be greatly popularize , which can improve the economic efficiency of farmers. The design improve the enhance part of traditional agricultural machine. Making its work part to lift vertically.To achieve the purpose of harvesting yam accurately and rapidly.Firstly, the traditional yam harvest methods are discussed, and elaborated on the working principle of the yam harvest.Secondly,discourse the gear transmission part of the yam harvest machine, vertical lifting part , the hollow spiral steel shaft this three part.Finally, the yam harvest machine design calculation process is described in detail.Key words: gear transmission part,the vertical lifting part,the hollow spiral steel shaft目录1设计方案说明............................................. 错误!未定义书签。
山药机械化收获技术及其发展
山药机械化收获技术及其发展
山药是一种重要的经济作物,具有丰富的保健和营养价值。
然而,传统的手工收获方法效率低下,浪费劳动力和时间,且易损坏山药。
因此,为提高山药收获的效率和质量,发展山药机械化收获技术势在必行。
山药机械化收获技术主要包括机械收获、机械去皮和机械分类等方面。
目前,山药机械化收获技术已经发展成为一个完整的系统。
其中,机械收获主要采用掘土机械或挂拖机械,可以实现全自动化的收获。
机械去皮主要包括刀片去皮和摩擦去皮。
刀片去皮使用刀片和高速旋转的滚筒,可以去除山药的皮,但是容易造成山药的损坏和浪费。
摩擦去皮主要是采用摩擦和水流来去除山药的皮,相比刀片去皮,摩擦去皮可以保证山药的完整性和品质。
机械分类主要采用传送带和智能分类系统,可以将山药按照大小、形状和品质进行分类,实现全自动化的处理。
随着技术的发展,山药机械化收获技术不断完善和更新。
最近,一些国际知名的农业机械制造商已经研发出一系列有效的山药收获机械,如CASE IH和Kubota等。
这些机械以其高效、节能和环保的特点,已经成为山药收获和加工的重要工具。
值得注意的是,山药机械化收获技术不仅可以提高山药的生产效率和品质,同时也可以减少劳动力和时间的浪费,降低人工成本。
此外,在不断推进机械化收获技术的同时,也需要加强对机械收获的安全性、环保性和持久性的研究和监管,确保山药生产的可持续性和质量安全。
总之,山药机械化收获技术是山药生产的重要方向之一。
发展和应用这些技术,不仅可以提高山药生产的效率和品质,而且可以降低成本,保证生产的可持续性和质量安全。
山药机械化收获技术及其发展
山药机械化收获技术及其发展1. 引言1.1 山药机械化收获技术的重要性山药机械化收获技术能够提高收获效率,节约人力成本。
采用机械化收获技术可以大大减少人工劳动量,提高收获速度,缩短收获周期,减少劳动力成本,提高农民的收益。
机械化收获技术可以提高山药产品的质量和产量。
传统的人工收获容易造成山药的破损和损失,而机械化收获能够减少这些损耗,保证山药的完整性和质量,提高产量。
山药机械化收获技术还能够改善农民的劳动环境,减轻农民的劳动强度,提高农民的生产积极性和生产热情,促进农业现代化进程。
山药机械化收获技术对于提高生产效率、降低成本、改善产品质量和农民生产条件具有重要意义,是山药产业发展的必然选择。
1.2 当前山药收获存在的问题1. 人工收获效率低下:山药生长在地下,收获需要人工挖掘,劳动强度大,耗时长,效率低下。
尤其是在大面积种植的情况下,人工收获无法满足需求。
2. 成本高昂:人工收获需要大量人力投入,劳动成本高,导致山药的生产成本增加。
而且人工收获容易造成损耗和浪费,进一步提高了生产成本。
3. 收获技术落后:目前主要依靠人工收获的山药生产方式在现代农业中已经落后,无法适应市场需求和产业发展的要求。
需要引进先进的机械化收获技术。
4. 市场竞争力不足:由于采用传统的人工收获方式,山药产量无法保证,供给不稳定,无法满足市场需求,导致市场竞争力不足,无法占据市场优势。
急需提高山药的生产效率和质量。
当前山药收获存在的问题主要表现在效率低下、成本高昂、技术落后和市场竞争力不足等方面,迫切需要引入机械化收获技术来解决这些问题,提高山药的生产效率和竞争力。
2. 正文2.1 山药机械化收获技术的发展历程山药机械化收获技术的发展历程可以追溯到20世纪90年代初,在中国山药种植业开始蓬勃发展的时期。
起初,山药的收获主要依靠人工劳动,效率低下且劳动强度大。
为了解决这一问题,研究人员开始尝试引入机械化收获技术。
随着农业机械化水平的不断提高,山药机械化收获技术逐渐得到推广和应用。
山药种植与收获新型设备的设计开发

调研 发现 , 目前 该 类 机 械 大 都 采 用 三轴 型设 计 , 其 中 两根 轴 用 于 深 松 土 壤 ( 种 植 时 使用 ), 另一 根 轴 用 于挖 掘 开 沟 ( 收 获 时 使 用 ) 。行 走 机 构 大 致 分 为轮 式 行 走 机 构 、履 带 式 行 走机 构 两种 。轮 式行 走 机 在 田 间作 业 遇 田埂 、排 水 沟 等 障碍 时 , 通 过 性 能不 高 , 田 间换 行 时 容 易 压 碎 山药 , 一般 只 作 为深 松 机 械 ,不 能 一 机 多 用 。履 带 式行 走 机 改 良了轮 式 行 走 机 的 田 间通 过 性 能 。它 的 结 构 形 式 有 两 种 : 一 种 用 手 扶 拖 拉 机 变 速 箱 作 传 动 部 件 ,采 用 多组 皮 带 传 动 变 速 ,适 用 范 围 窄 , 调 整 操 作 不便 ; 另一 种 采 用 液 压 驱 动 履 带 行走 机 构 , 通 过 液 压 传 动 实 现 行 走 机 构 的 无 级 调 速 , 操 作 性 、 适应 性 大 幅度 提 高 。挖 掘 装 置 可 分 为链 式挖 掘装 置 和 螺旋 叶片 轴 式 挖 掘 装 置 两 种 。链 式 挖 掘 装 置 采 用 回转 链 式 传 动 ,传 动 链 工 作 环 境 恶 劣 , 使 用 寿 命 不 长 ;螺 旋 叶片 轴 式 挖 掘 装 置 ,改 良 了
1 0 m ,深 松 0 . 0 7 h m 。( 1 亩 )土 地 需 要6 0 个人 工 。
收 获 时 , 需用 人 工 将 种 植 畦 内泥 土 全 部挖 出 。 一 般 一个壮劳力每天只能收获2 0 I n 。不 但 劳动 强度 大 , 作业 效率 低 ,而 且 在 挖 取 时 容 易 铲 断 、 铲伤
山药收获机械化技术研究

天津 市农业机 械研 究所
摘 要
梁 学强
张景 崎
翟 雯雯
丁 润锁
尚立新
运
杰
山药不仅具有很 高的药用价值和食用价值 , 而且还具有很 高的经济价值。针对麻 山
药的种 植 特 点 , 开发 研 制 1 ・ 1 K 7型 山药 开沟 收 获机 , 设计 行 走减 速 器 , 用链 式开 沟 方式 对 采
下旬及 1 0月 ) 喷 质 量 分 数 为 2 %的 溴 氰 菊 酯 乳 油 , . 5
20 0倍液 ,或质量分数 为 7 %的辛硫磷 1 0 倍 液可杀 0 5 0 0
死 成 虫 , 午 9 1 时 喷 药 效 果 最 好 , 获前 1 d 止 用 上 -1 收 5 停
培注意通风排湿 ; 应用无滴膜或及时除雾滴 , 降低湿度。
2 机具 试验作 业 情况
21 机具 试 验条 件 .
种植和收获农艺要求 :麻 山药的种植株距为 2 m, 0 c
行距为 4 0 m,收获 时需 要在 两 行 之 间开 一个 2 左 右 c 5m c 宽 ,0 8 6 ~ 0 m深 的沟 。 c
时间 , 进一步提高了机具的作业效率。
在 开沟 作业 时 , 油发 动机 与 行走 减 速器 联 接再 驱 动 柴 拖 拉机 行 走 轮行 走 作 业 ; 当不 需 要 作业 时 , 油发 动 机 直 柴
皮带轮直接与减速器相连 , 再有减速器与拖拉机的驱动轮 相连 , 以达到对拖拉机进行 降速的 目的 , 开沟收获机挂接 在小 四轮拖拉机上进行开沟作业。
42 物理 防治 .
药 。 在苗 期 或韭 菜 收割 后 , 蛆 防 治结 合 灌水 进行 , 韭
麻山药收获机振动松土装置的设计
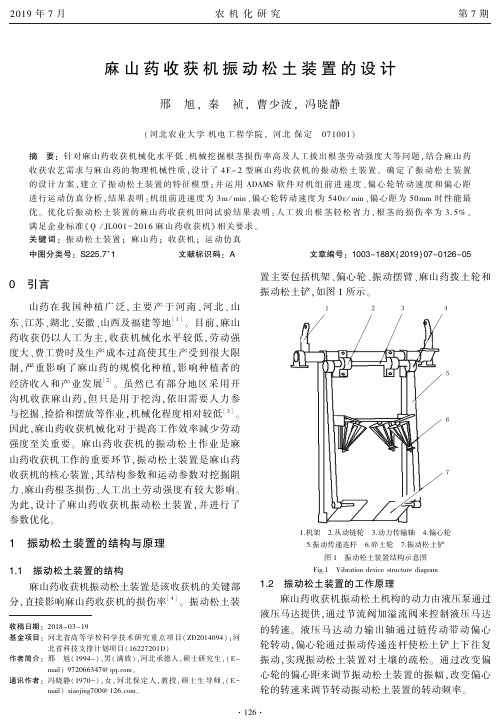
麻山药收获机振动松土装置的设计邢㊀旭ꎬ秦㊀祯ꎬ曹少波ꎬ冯晓静(河北农业大学机电工程学院ꎬ河北保定㊀071001)摘㊀要:针对麻山药收获机械化水平低㊁机械挖掘根茎损伤率高及人工拔出根茎劳动强度大等问题ꎬ结合麻山药收获农艺需求与麻山药的物理机械性质ꎬ设计了4F-2型麻山药收获机的振动松土装置ꎮ确定了振动松土装置的设计方案ꎬ建立了振动松土装置的特征模型ꎻ并运用ADAMS软件对机组前进速度㊁偏心轮转动速度和偏心距进行运动仿真分析ꎬ结果表明:机组前进速度为3m/min㊁偏心轮转动速度为540r/min㊁偏心距为50mm时性能最优ꎮ优化后振动松土装置的麻山药收获机田间试验结果表明:人工拔出根茎轻松省力ꎬ根茎的损伤率为3.5%ꎬ满足企业标准«Q/JL001-2016麻山药收获机»相关要求ꎮ关键词:振动松土装置ꎻ麻山药ꎻ收获机ꎻ运动仿真中图分类号:S225.7+1㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)07-0126-050㊀引言山药在我国种植广泛ꎬ主要产于河南㊁河北㊁山东㊁江苏㊁湖北㊁安徽㊁山西及福建等地[1]ꎮ目前ꎬ麻山药收获仍以人工为主ꎬ收获机械化水平较低ꎬ劳动强度大㊁费工费时及生产成本过高使其生产受到很大限制ꎬ严重影响了麻山药的规模化种植ꎬ影响种植者的经济收入和产业发展[2]ꎮ虽然已有部分地区采用开沟机收获麻山药ꎬ但只是用于挖沟ꎬ依旧需要人力参与挖掘㊁捡拾和摆放等作业ꎬ机械化程度相对较低[3]ꎮ因此ꎬ麻山药收获机械化对于提高工作效率减少劳动强度至关重要ꎮ麻山药收获机的振动松土作业是麻山药收获机工作的重要环节ꎬ振动松土装置是麻山药收获机的核心装置ꎬ其结构参数和运动参数对挖掘阻力㊁麻山药根茎损伤㊁人工出土劳动强度有较大影响ꎮ为此ꎬ设计了麻山药收获机振动松土装置ꎬ并进行了参数优化ꎮ1㊀振动松土装置的结构与原理1.1㊀振动松土装置的结构麻山药收获机振动松土装置是该收获机的关键部分ꎬ直接影响麻山药收获机的损伤率[4]ꎮ振动松土装收稿日期:2018-03-19基金项目:河北省高等学校科学技术研究重点项目(ZD2014094)ꎻ河北省科技支撑计划项目(16227201D)作者简介:邢㊀旭(1994-)ꎬ男(满族)ꎬ河北承德人ꎬ硕士研究生ꎬ(E-mail)972066347@qq.comꎮ通讯作者:冯晓静(1970-)ꎬ女ꎬ河北保定人ꎬ教授ꎬ硕士生导师ꎬ(E-mail)xiaojing700@126.comꎮ置主要包括机架㊁偏心轮㊁振动摆臂㊁麻山药拨土轮和振动松土铲ꎬ如图1所示ꎮ1.机架㊀2.从动链轮㊀3.动力传输轴㊀4.偏心轮5.振动传递连杆㊀6.碎土轮㊀7.振动松土铲图1㊀振动松土装置结构示意图Fig.1㊀Vibrationdevicestructurediagram1.2㊀振动松土装置的工作原理麻山药收获机振动松土机构的动力由液压泵通过液压马达提供ꎬ通过节流阀加溢流阀来控制液压马达的转速ꎮ液压马达动力输出轴通过链传动带动偏心轮转动ꎬ偏心轮通过振动传递连杆使松土铲上下往复振动ꎬ实现振动松土装置对土壤的疏松ꎮ通过改变偏心轮的偏心距来调节振动松土装置的振幅ꎬ改变偏心轮的转速来调节转动振动松土装置的转动频率ꎮ2019年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第7期2㊀振动松土装置的三维建模及运动仿真2.1㊀振动松土装置的主要参数影响振动松土装置牵引阻力和功耗及麻山药的收获质量的影响因素主要有:偏心轮的偏心距e㊁偏心轮的转速nꎬ以及振动松土铲的尺寸㊁开沟装置切削深度和传输连接杆的长度等ꎮ偏心距过大过小都会影响工作质量ꎬ选定偏心距e初始值为30㊁40㊁50mm进行仿真分析ꎮ振动松土铲的尺寸也会影响振幅ꎬ且振动松土铲的长度太大ꎬ会加大阻力和功耗ꎬ故振动松土铲长设定为300mmꎬ宽为250mmꎮ麻山药收获机工作时ꎬ链刀开沟装置切削深度为1000mmꎬ而振动松土铲在地下900mm处上下振动松土ꎬ链刀开沟装置开沟深度要比振动松土装置的工作深度大100mm:如果小于100mmꎬ振动松土铲工作时ꎬ可能碰到没有疏松的硬土层ꎻ如果大于100mmꎬ链刀开沟装置会增加功耗ꎮ因此ꎬ振动松土铲的振幅要小于80mmꎬ振幅过大会将麻山药挤压振断或者使麻山药破损ꎮ振动松土装置的动力由液压马达经过链条传递到动力传输轴上ꎬ动力传输轴和偏心轮是通过键连接ꎬ动力再经过动力传输连接杆传递到振动松土铲上ꎬ动力传递连杆的长短决定着振动松土铲工作的深度ꎬ设计动力传输连接杆的长度为1530mmꎮ2.2㊀振动松土装置的三维建模首先利用SolidWorks软件将麻山药振动松土装置进行三维建模ꎬ并进行干涉检查ꎮ振动松土装置的三维模型和干涉检查如图2所示ꎮ图2㊀振动松土装置的三维模型和干涉检查Fig.2㊀Thethreedimensionalmodalandinterferencecheckingofvibrationdevice2.3㊀模型导入以及分析前处理将建立的振动松土装置三维模型转换成Parasol ̄id中间格式(X_T)ꎬ导入ADAMS软件中进行运动仿真分析ꎮ振动松土机构仿真模型如图3所示ꎮ图3㊀振动松土机构仿真模型Fig.3㊀Thesimulationmodelofvibrationmechanism在ADAMS软件中ꎬ定义麻山药收获机的前进速度为3m/minꎬ参考牛蒡收获机偏心轮以540r/min的转速转动[5]ꎬ将偏心轮的偏心距分别在30㊁40㊁50mm情况下进行仿真分析ꎮ2.4㊀机构运动特性仿真分析对铲尖和铲尾的位移㊁角速度和角加速度进行仿真分析ꎮ设置仿真时间Endtime=1sꎬ分析步长step=500ꎮ偏心轮的偏心距为30mm时ꎬ仿真结果如图4~图7所示ꎮ图4㊀铲尖的振幅变化Fig.4㊀Theamplitudeoffrontchanges图5㊀铲尾的振幅变化Fig.5㊀Theamplitudeofbackchanges由图4和图5可知:当偏心轮的偏心距为30mm时ꎬ铲尖的振幅为16mmꎬ铲尾的振幅为36mmꎬ曲线为三角函数趋势ꎬ符合振动松土装置实际工作状态ꎮ2019年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第7期图6㊀铲尖的角速度Fig.6㊀Theangularvelocityoffrontshovel图7㊀铲尖的角加速度Fig.7㊀Theangularaccelerationoffrontshovel由图6可知:当偏心轮的偏心距为30mm时ꎬ振动松土铲铲尖的角速度峰值为320rad/sꎮ由图7可知:当偏心轮的偏心距为30mm时ꎬ铲尖的角加速度峰值为53000rad/s2ꎮ偏心轮的偏心距为40mm时仿真结果ꎬ如图8~图11所示ꎮ图8㊀铲尖的振幅变化Fig.8㊀Theamplitudeoffrontchanges图9㊀铲尾的振幅变化Fig.9㊀Theamplitudeofbackchanges图10㊀铲尖的角速度Fig.10㊀Theangularvelocityoffrontshovel由图8和图9可知:当偏心轮的偏心距为40mm时ꎬ铲尖的振幅为26.5mmꎬ铲尾的振幅为44.5mmꎮ曲线为三角函数趋势ꎬ符合振动松土装置实际振动工作状态ꎮ由图10可知:当偏心轮的偏心距为40mm时ꎬ振动松土铲铲尖的角速度峰值为400rad/sꎮ图11㊀铲尖的角加速度Fig.11㊀Theangularaccelerationoffrontshovel由图11可知:当偏心轮的偏心距为40mm时ꎬ铲尖的角加速度峰值为24000rad/s2ꎮ偏心轮的偏心距为50mm时仿真结果如图12~图15所示ꎮ图12㊀铲尖的振幅变化Fig.12㊀Theamplitudeoffrontchanges图13㊀铲尾的振幅变化Fig.13㊀Theamplitudeofbackchanges由图12和图13可知:当偏心轮的偏心距为50mm时ꎬ铲尖的振幅为35.8mmꎬ铲尾的振幅大约为53mmꎬ曲线为三角函数趋势ꎬ符合振动松土装置实际振动工作状态ꎮ由图14可知:当偏心轮的偏心距为50mm时ꎬ振动松土铲铲尖的角速度峰值为490rad/sꎮ由图15可知:当偏心轮的偏心距为50mm时ꎬ铲尖的角加速度峰值为30000rad/s2ꎮ图14㊀铲尖的角速度Fig.14㊀Theangularvelocityoffrontshovel图15㊀铲尖的角加速度Fig.15㊀Theangularaccelerationoffrontshovel经过仿真模拟后ꎬ分别对比偏心轮的偏心距在30㊁40㊁50mm情况下振动松土装置的振幅㊁振动松土铲铲尖角加速度的曲线ꎬ根据曲线可以得出偏心轮的偏心距㊁铲末端的振幅和铲尖角加速度参数分析表ꎬ如表1所示ꎮ表1㊀偏心距㊁振幅㊁铲尖角加速度分析表Table1㊀Eccentricityꎬamplitudeꎬangularaccelerationanalysistable偏心轮的偏心距e/mm铲末端的振幅/mm铲尖角加速度峰值/rad s-23036187004044.524000505330000㊀㊀当偏心轮的偏心距为30㊁40㊁50mm时ꎬ3个振幅都能满足振幅小于80mm的要求ꎮ从振幅的角度考虑ꎬ可以看出当偏心距为50mm时的振幅最大ꎬ为53mmꎬ振幅最优ꎻ其次是振幅为44.5mmꎬ最后是振幅为36mmꎮ从振动松土铲铲尖的角加速度峰值考虑ꎬ当偏心距为30mm时ꎬ铲尖角加速度为18700rad/s2ꎻ当偏心距为40mm时ꎬ铲尖角加速度为24000rad/s2ꎻ当偏心距为50mm时ꎬ铲尖角加速度为30000rad/s2ꎮ从振动松土铲的振幅和铲尖角加速度两个方面综合考虑ꎬ选择偏心轮的偏心距为50mm最佳ꎮ当偏心距为50mm时ꎬ振动松土铲的振幅为53mmꎬ角加速度为30000rad/s2ꎮ当偏心轮的偏心距为50mm时ꎬ铲末端在振动传递连杆方向上的加速度曲线如图16所示ꎮ由图16可知:振动松土铲末端在上下摆动过程中ꎬ最大加速度为1.75E+005mm/s2ꎮ图16㊀铲末端在振动传递连杆方向的加速度Fig.16㊀Theaccelerationoftheshoveltipinthedirectionofthevibrationtransmissionlink3㊀振动松土装置的田间试验3.1㊀试验条件试验地址选在河北省保定市蠡县孙庄的麻山药种植区ꎬ在试验田内选择一块地势较为平坦的地作为试验的试验区ꎬ按照机组试验方案要求ꎬ在试验前对实验区进行规划[6]ꎮ该试验区长度300mꎬ宽度20mꎬ土壤为壤土ꎬ试验对象为麻山药中的 紫药 品种ꎬ预设麻山药收获机的开沟深度为1000mmꎮ试验现场麻山药收获机的作业效果如图17所示ꎮ机器作业后ꎬ土壤疏松ꎬ人工拔出麻山药轻松省力ꎮ图17㊀麻山药收获机作业效果Fig.17㊀Theoperationeffectofyamharvester3.2㊀作业性能指标测定通过麻山药收获机田间试验ꎬ测试麻山药收获机振动松土装置的作业效果ꎬ检测损伤率㊁折断率和破损率ꎮ机器作业后ꎬ按每30m选一个点测算ꎬ总共选取10个测点ꎬ在每个测试点随机选取20棵麻山药根茎进行检测ꎮ采用人工辅助提拉捡拾的方式ꎬ收集试验的麻山药ꎬ检测点的位置应避开地边和地头ꎻ计算每点收获的麻山药总数ꎬ从中挑出折断的和破损的麻山药ꎬ试验结果如表2所示ꎮ有TZ=WZWˑ100%(1)TP=WPWˑ100%(2)式中㊀TZ 折断率(%)ꎻ㊀TP 破损率(%)ꎻ㊀W 收获的麻山药的总棵数ꎻ㊀WZ 收获的麻山药中折断的麻山药的棵数ꎻ㊀WP 收获的麻山药中破损的麻山药的棵数ꎮ表2㊀根茎折断率调查表Table2㊀Thebreakingrateofrootsurveytable测点折断数破损数损伤数10002000300041125011600070008123900010011㊀㊀根据表2的数据ꎬ分别按照式(1)㊁式(2)计算折断率和破损率ꎬ可以计算出根茎折断率为1%㊁根茎破损率为2.5%㊁根茎的损伤率为3.5%ꎬ满足企业标准总损伤率低于5%的要求ꎮ4㊀结论1)运用ADAMS软件对机组前进速度㊁偏心轮转动速度和偏心距进行运动仿真分析ꎬ结果表明:机组前进速度为3m/min㊁偏心轮转动速度为540r/min㊁偏心距为50mm时性能最优ꎮ2)试验表明:机器作业后ꎬ土壤疏松ꎬ人工拔出麻山药轻松省力ꎬ大大提高了作业效率ꎬ降低了辅助劳动强度ꎮ3)田间试验结果表明:人工拔出根茎轻松省力ꎬ根茎的损伤率为3.5%ꎬ满足企业标准«Q/JL001-2016麻山药收获机»[7]相关要求ꎮ参考文献:[1]㊀彭慧.中国山药产业发展的初步研究[D].北京:中国农业大学ꎬ2006.[2]㊀冯晓静.麻山药收获机械化技术现状与[J].中国农机化学报ꎬ2017ꎬ38(4):113-116.[3]㊀于万胜.山药收获机的设计与研究[D].天津:河北工业大学ꎬ2014.[4]㊀付威ꎬ坎杂ꎬ陈海涛.拔取式萝卜收获机振动松土铲参数优化研究[C]//中国农业机械学会.2012中国农业机械学会国际学术年会论文集.北京:中国农业机械学会:2012:253-254.[5]㊀吕宏靖.牛蒡收获机的实验研究及参数优化[D].沈阳:沈阳农业大学ꎬ2015.[6]㊀南京农业大学.田间试验和统计方法[M].北京:农业出版社ꎬ1988.[7]㊀河北质量监督局.Q/JL001-2016麻山药收获机企业标准.[DB/OL].[2017-12-30].http://www.hebqts.gov.cn/.DesignofVibrationDeviceforYamHarvesterXingXuꎬQinZhenꎬCaoShaoboꎬFengXiaojing(Mechanical&ElectricalEngineeringCollegeꎬAgriculturalUniversityofHebeiꎬBaoding071001ꎬChina)Abstract:Inordertosolvetheproblemoflowmechanizationlevelꎬhighrateofrhizomedamageandhighlaborintensityofpullingouttherootsmanuallyꎬbyreferencetothephysicalmechanicalpropertiesofyamandagriculturalrequire ̄mentsꎬInthispaperꎬavibrationlooseningdeviceof4F-2typeyamharvesterisdesignedꎬanditscharacteristicmodelisbuiltꎬthespeedofthemachineꎬtheeccentricwheelrotatingspeedandeccentricityofmotionaresimulatedandanalyzedusingADAMSsoftwareꎬthesimulationresultsshowthatwhenthemovingspeedis3m/minꎬtheeccentricwheelrotationspeedis540r/minꎬeccentricityis50mmꎬperformanceofthemachineisbest.Thefieldtestresultsoftheyamharvesterwithoptimizedvibrationandsoillooseningdeviceshowedthatitiseasytopullouttherootsbyhandandthedamagerateofrhizomeswas3.5%ꎬwhichcouldmeettherequirementsoftheenterprisestandardQ/JL001-2016yamharvester.Keywords:vibrationandpinesoildeviceꎻyamꎻharvesterꎻmotionsimulation2019年7月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第7期。
山药收获机开沟机构的设计与仿真分析
材料
密度
泊松比 弹性模
/( kg - m-3 )
量/GPa
抗拉强 屈服强 度/MPa 度/MPa
析,得到支撑架的应力、应变与变形情况,以及前六阶振型,为支撑架与开沟机构的优化提供技术参考。
关键词:山药收获机开沟机构设计仿真
中图分类号:TH122
文献标志码:A 文章编号:1000 -4998(2020)01 -0026 -06
Abstract: In the haves—ng operation of fhe deep_ rooted rhizome crop_ yam $ the ditching mechanism of
the yam harvester takes on key job. In Cic ditching mechanism $ Cic load of tee suppoo frame is the laroest $ and
Cic working conditions and alternating changes aro complicated witli frequent occurance of resonance $
青岛理工大学 机械与汽车工程学院 山东青岛266520
摘 要:在深埋根茎类作物山药的收获作业中,山药收获机的开沟机构承担重要工作。在开沟机构
中,支撑架的载荷最大,作业工况及交替变化较为复杂,易发生共振、变形和断裂。对山药收获机的开沟
机构进行了设计,建立了开沟机构中支撑架的模型,并进行了静力学与模态分析。通过静力学与模态分
笔者对山药收获机开沟机构进行了设计,分析开 沟收获过程中支撑架的受力问题&
2开沟机构结构
所设计的山药收获机开沟机构结构如图1所示& 在主轴的两端设有轴承套,轴承套固定在后悬挂机架
定点式山药收获装置设计
定点式山药收获装置设计
符浩;禚理成;杨硕林
【期刊名称】《价值工程》
【年(卷),期】2022(41)31
【摘要】现阶段铁棍山药收获两种方式:一种采用人力一根一根进行挖掘采收,耗时较长,另一种机械化挖掘方式,需要实现在山药种植垄的两侧挖深沟,才能够配合设备实现较好的挖掘,仍存在收货前的准备操作,且存在机械破损的情况。
为此,设计一种山药收获装置、设备及方法,主要通过电机正反转配合工作内轴、工作外轴的螺纹连接,实现挖掘槽伸入渗出,加上摆动气缸、摆动球等摆动装置实现铁药土槽柱在种植土壤内部的折断分离,激振器的瞬时激振力保证铁药土槽柱离开种植土壤后的脱离筛选分离,整个过程通过控制面板的各类开关实现自动化控制,消除事先挖沟等大量劳动力,提高挖掘效率,保证铁棍山药挖掘品质效果。
【总页数】3页(P68-70)
【作者】符浩;禚理成;杨硕林
【作者单位】临沂技师学院;山东农业工程学院机械电子工程学院
【正文语种】中文
【中图分类】S233
【相关文献】
1.烟用自走式起垄定点施肥装置设计及试验
2.新型爪挖式山药收获装置主杆的设计与分析
3.麻山药收获机振动松土装置的设计
4.悬挂式山药收获机振动挖掘碎土装置设计与试验
5.悬挂式山药收获机设计与试验研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
山药收获机建设方案第1章绪论1.1课题来源及研究课题的意义和目的山药对当地气候要求不严,但喜温暖湿润,忌积水,怕干旱。
宜种植于肥沃疏松、土层深厚、排水良好的砂质壤土上种植。
原产地位于,现在分布于中国西北,华北,和长江流域的等地。
由于其营养比较丰富,一直以来都被视为比较理想的补虚佳品,不仅可作为主粮,又可作为蔬菜食用。
有很高的药用价值和食用价值。
随着现代社会人们更加注重养生和健康,而山药的药用价值和使用价值使得其成为很多人的选择。
特别是近几年,山药的种植面积和种植规模不断上升。
因此,山药生产和收获的机械化越来越得到行业的重视。
长期以来,山药的收获都是靠传统的人力收获方式,山药的根茎较长,难以采收,如果收获技术不够成熟,根茎破损率就会很高。
我国大部分地区收获山药的方法是:从山药种植垄的一端开始,先挖出60-70cm左右的土坑来,人坐在坑的边上,然后用特制的山药铲,沿着地面上山药生长的20cm处的两边开始挖,将根两边泥土铲出,一直挖到山药沟下见到根茎的尖端为止,最后轻轻铲断剩下的细根,手握着根茎的中上部分,小心拔出山药的根茎。
一定要小心精细铲土,避免山药根茎的损伤和折断。
采收山药时,一定要按着山药种植的顺序,一株一株地挨着挖,这样才能有效减少破损率,又能避免漏收。
由于山药一般在下层土壤延伸,最深可延伸到地下70~100cm处,靠人力收获相当费力。
最重要的是人力收获的过程中容易挖到山药块茎,影响山药的品质和市场。
而且劳动强度大,生产效率低。
为此,山药收获的机械化问题就亟待解决。
山药收获技术如果能够实现机械化,将有力地推动山药生产的规模化,显著降低山药生产成本,节省劳动力和农活作业量,使山药种植户增加更多的收入,提高农业生产的经济效益。
同时,也能促进农机朝着更先进,更现代化的方向发展,使其更好地服务于现代化农业生产和社会主义新农村的建设,实现伟大的中国梦。
本课题研究了我国山药收获机械化的发展现状,山药收获机的未来研究方向。
为山药收获方式以及推广山药收获机械化,促进山药生产效率提供了理论依据。
1.2 山药收获机的现状及方案说明1.2.1 我国山药收获机的现状为了克服山药收获过程中易折断的损伤的难题,我国广大设计者和科学家们进行了刻苦的钻研,以下是现阶段我国对山药收获机械化的研究现状。
资料容查自中国知识产权局专利检索。
第一种山药收获机的发明者是垒和善文。
这个发明设计了一种多功能山药收获机。
可以看到,中履带底盘,设置在履带底盘上的操作台、竖直机架、电机、向上提升机构,安装在机架上并且能够沿固定的机架上下移动的齿轮箱的总成,安装在齿轮箱结构下面的用于开沟的螺旋钻轴和提土板,所述电机结构与齿轮箱结构由传动轴实现传动连接;提升机构与齿轮箱结构连接,实现对齿轮箱结构的升降操作;山药收获装置还包括设于箱结构一侧,能够将开沟轴开出的土,向外送给送土器,以及设于履带下部前面的能够实现把土填回功能的送土器。
这种山药收获机的结构比较灵活,而且功能多样化,能够同时实现收获山药和沟填土的两项功能,除了采收山药外,还可以开电缆沟、管道沟、实现一机多种用法,省时省工,具有相当大的市场价值。
山药收获机的机构简图如图1:图1-1 山药收获机理论图第二种山药收获机发明者倪凡喜。
这个创新专利目的在于,克服现阶段生产技术的不足之处,提供一种山药收获机的理论设计,在不损伤山药块茎的前提下,可以很提高生产效率,降低采收山药时的成本。
此专利所述的山药收获机,包括振动破土机构、破土机构的固定架、旋转型轴承座、液压油缸、可以左右移动的轴承固定支架、悬挂型四轴固定支架、手轮、挡土板、开沟刀片、开沟链条、链条固定支架和从动轮。
破土机构固定架是这个专利的主体支撑架,整体呈现方形的框架结构,破土机构固定支架的后端,连接着设置的振动破土机构,破土机构固定支架的前端,连接着旋转式轴承座,旋转轴承座的前面连接着液压油缸,液压油缸的前端连接到左右移动轴承座固定架,左右移动轴承座固定架设置在悬挂式四轴连接在固定架上,在悬挂型四轴固定支架的一边,设计的有手轮,在悬挂型四轴固定支架的两端后侧,设计有挡泥板。
在旋转型轴承座的下端,连接设计有链条固定支架,链条固定支架的前端设计有主动轮,链条固定支架的后端设计有从动轮,绕过主动轮与从动轮,设计有开沟链条,开沟链条的外表面上设置有开沟刀片。
连接到链条固定架上,设置有涨紧固定架,涨紧固定架的下端设置有涨紧轮,涨紧轮与开沟链条的表面相接触。
山药收获机的机构简图如下图:图1-2 山药收获机示意图第三种山药收获机的发明者是卢双贵。
这种山药收获机,由切割锯、松土板与螺旋提升机构组成。
带锯上部连接旋转轮,中间穿过狭长形的开口,下面套有轴承,中间的松土板在后面随着将土松动,松土板固定在套管上的伸缩杆上,液压气泵来提供动力,后面的螺旋提升机构在切割后的土方下面向上转动,即可把山药向上顶出。
由于是采用的拖拉机为动力,切割的土方要大于山药沟,从山药的下面向上拱,不仅保证了山药的完整度,不损坏山药的块茎,而且保持了山药沟的原来样子,工作的效率极大提高,每天可挖掘山药三到五亩。
山药收获机的机构简图如图1-3:图1-3 山药收获机结构简图1.2.2 山药收获机的设计要求传统的农业机械设计,存在着设计周期长,设计成本高,设计质量差,图纸识别困难等问题。
随着计算机技术的快速发展,虚拟制造和运动仿真在农机设计中得以实现,从而大大缩短了设计周期,降低生产成本,提高了设计的准确性和可靠性。
本设计利用三维设计软件,对农业机械进行产品设计。
具体容:1.对农机进行总体结构方案设计,满足其功能要求,力求结构简单,功能合理。
2.进行农机零件设计,强度和结构上符合要求3.进行产品装配。
4.产品的动态仿真。
本方案设计山药收获机用于山药的收获作业。
提高山药收获效率,降低劳动力,节约山药收获成本。
创新设计或改进现阶段市面上已有的山药收获机,使山药收获作业起来更简单。
给定的条件和要求翻土作业时的作业量为400~500m/小时,采用螺旋排除浮土,螺旋转速为300转/分钟左右。
第2章设计方案分析2.1 设计方案的说明2.1.1 设备简介通过现阶段山药收获机的专利以及考察实际情况,可以得出,山药收获机的工作原理和组成部分。
山药收获机的组成部分大致可由支撑部分、动力部分、工作部分和传动部分。
支撑部分:主要就是山药收获机的机架和山药收获机与拖拉机连接部分,用于支撑整个山药收获机能够顺利切协调的完成收获工作。
动力部分:用于连接拖拉机传输的动力,把动力提供给山药收获机的传动部分。
传动部分:传输动力,并起到减速作用。
工作部分:这部分入土,用螺旋开土,达到收获山药的目的。
2.1.2 山药收获机的工作原理拖拉机液压系统带动收获机传动系统,经减速传动给工作轴,利用强大的扭矩,旋开土壤。
拖拉机提供向前的牵引力带动收获机向前行进。
2.2 设计方案选择与对比在最终确定山药收获装置的设计方案前,做了很多的准备工作。
首先,查阅了中国专利网上的一些专利申请,仔细阅读并理解了山药收获机现阶段的理论设计情况。
也看到了很多比较好的方案或者设计,其实还都在理论阶段,很多设计者们的精妙设计都还没有通入生产。
这也从一方面表现了现阶段山药收获机的落后程度,同时山药收获的大难题亟待解决。
其次,在网络上检索山药收获机,会发现很多厂家有在直销,仔细研究后,也对山药收获机在设计之后,开发生产的可能性有了一定的认识。
明确了,在现阶段哪些设计是不能开发的,哪些设计更容易开发。
最后我也去了一些山药种植基地和一些机械厂,进行了实地考察,亲眼看到了制造成型和正在工作的山药收获机。
对山药收获机的设计开发有了进一步的认识。
现在开发成功的山药收获机大致可以分为三种:1.单侧山药开沟机。
2.双侧山药开沟机。
3.链式山药收获机。
下面听过对三种收获机的优缺点分析确定设计方案。
2.2.1 单侧山药开沟机现在的很多设计和市面上已经投入使用的山药收获机,一般都是在山药种植垄的一侧进行挖沟,然后通过人力下沟进行二次挖掘,这样确实省了一部分人力,但是进行二次挖掘时,还是很费力,而且容易损伤和折断山药的茎块。
如下图2-1所示。
这种山药收获机工作原理简单,作业效率高,而且易推广,在一些土壤比较肥沃、疏松的地区比较适合。
但是缺点也比较明显,收获机开沟之后,山药依然埋一侧的土壤中,剩下的的工作必须依靠人力,从沟中向山药一侧进行挖掘,挖掘的过程不仅难以操作,而且容易损伤山药,影响山药的销售品质。
图2-1单垄山药收获机实物图2.2.2 双侧山药开沟机已经投入使用山药收获机中,现在比较流行是一种是在山药两侧开沟,确定山药种植行的宽度,设计出两个开沟钻的距离,从而从山药种植行的两侧进行挖沟。
实物图如下图2-2。
这种山药收获机与单侧开沟机相比,有很大的优势,降低了靠人力进行二次挖掘困难程度。
但是这种收获机也有明显的缺点,它虽然降低而人工挖掘强度,但是山药和土块还是紧密结合在一块,无法克服采收过程中的损伤山药块茎的问题。
并且在此装置开沟采收后的土地上,会留下两道很深的沟壑,这将影响下一季山药的种植,导致种植山药时需要填平沟壑。
变相提升了山药种植的难度。
图2-2 双侧山药收获机实物图2.2.3 链式山药收获机链式山药收获机与以上两种开沟机原理不同,收获山药之后不会再地上留下很深的沟,这样下一季的种植就不会受到影响。
而且这种山药收获机所需功率小,相对以上两种在收获的时候更经济,更节约成本。
但是链式山药收获机也没有以上两种开沟机的有点。
依靠链上面的刀片进行开土,很难达到很深的程度。
而山药块茎很深,这样在后续的采收中还是需要大量的人力来完成,甚至还需要人力来进行二次开沟。
这样一来,链式收获机在采收中起到的作用就会很局限。
下图2-3为链式收获机的的实物图:图2-3 链式山药收获机2.3 设计方案的优化分析及确定通过对山药收获机的现状研究,对市场上已经开发成功的山药收获机的分析,总结山药收获机需要满足的条件,分析现有山药收获机的优缺点,最终确定山药收获机的最佳优化方案。
首先总结设计山药收获机要完成的任务:1、通过山药收获机能实现山药收获的简易化,提高山药收获的效率。
2、此装置在收获山药的时候不能损坏山药的块茎。
3、山药收获机的设计要尽量简易,方案要符合实际情况。
设计方案可以投入生产,并且可以推广。
其次通过对上述现有山药收获机的研究与考察,发现现阶段山药收获机有两个无法实现的难题:1、装置在开沟后仍然需要大量的人力劳动来完成后续的采收。
2、在后续人力采收的工程中,比较容易损坏山药的块茎。
想要克服这些问题,必须尽量使山药收获机开沟后,山药所在土块要有所松动,使山药与土壤的结合不在紧密。
在装置作业之后,人工收山药的过程中,能够更直接。
这样就能提高山药的完整性,尽量少的破坏山药的块茎。