施迈茨真空讲座
机器人真空吸盘阵列搬运抓手设计(范文)

摘要工业机器人是现代人为了加大生产效率,提高生产力而发明的一种机器装置,他代表着几次工业革命过后的最高科技生产水平。
科技的飞快发展,工业机器人的水平也越来越高,拥有多关节、多自由度的工业机器人则愈来愈智能化,愈来愈多样化,应用到各个方方面面,搬运、医疗、救援勘探、工厂流水线。
不同国家的机器人发展水平参差不齐,差距十分大。
我们国家的机器人产业目前就很落后,美,日等国家机器人产业水平相当高,像ABB公司则代表瑞士的最高水平,其旗下的产品功能十分强大,占据了工业机器人江山的很大一部分,代表着工业机器人的高水平。
本文详细介绍了如何开展ABB IRB 120机器人集成应用设计工作,用Sol idworks 软件设计机器人末端执行器(气动吸盘阵列工具)与机器人末端法兰无缝连接的连接机构,能够实现纸箱(长120mm,宽80mm,高200mm)三维矩阵搬运功能,并基于Robotstud i o软件进行运动规划与仿真.关键词:工业机器人气动吸盘规划与仿真AbstractIndustrial robot is a kind of machine device invented by modern people to increase production efficiency and increase productivity. It represents the highest level of high-tech production after several industrial revolutions. With the rapid progress of science and technology, the level of industrial robots has also developed very fast, with multi-joint, multi-degree of freedom industrial robots more and more intelligent, more and more diversified, applied to all aspects, handling, medical treatment, rescue exploration, factory assembly line. The level of robot development in different countries is uneven and the gap is very large. China's robotics industry is lagging behind, but companies like ABB represent the highest levels in Sweden, Switzerland The product function is very powerful, occupies a large part of the industrial robot Jiangshan, represents the high level of industrial robot.this paper introduces in detail how to carry out the ABB IRB 120 robot integrated application design work, using Solidworks software to design the robot end actuator (pneumatic sucker array tool) and the robot end flange seamless connection mechanism, can realize the carton (120 mm, wide 80 mm, high 200 mm)3d matrix handling function, and based on Robotstudio software for motion planning and simulation.Key words: industrial robot pneumatic sucker planning and simulationPN 系列:同PK 系列的性质一样。
码垛机械手的手部装置设计与选用
2021年3月第49卷第6期机床与液压MACHINETOOL&HYDRAULICSMar 2021Vol 49No 6DOI:10.3969/j issn 1001-3881 2021 06 020本文引用格式:谢波,邓广基.码垛机械手的手部装置设计与选用[J].机床与液压,2021,49(6):94-97.XIEBo,DENGGuangji.Designandselectionforhanddeviceofpalletizingmanipulator[J].MachineTool&Hydrau⁃lics,2021,49(6):94-97.收稿日期:2019-12-05作者简介:谢波(1985 ),男,硕士研究生,讲师,主要从事机电一体化设备的研究开发㊂E-mail:358852287@qq com㊂码垛机械手的手部装置设计与选用谢波1,邓广基2(1 广东开放大学/广东理工职业学院,广东广州510091;2 施迈茨(上海)真空科技有限公司,上海201210)摘要:码垛机械手是一种常见的自动化搬运设备,其终端是手部装置㊂码垛和拆垛的部分动作都需要通过手部装置来实现㊂配置一套合适的手部装置能有效提升码垛机械手的工作性能和效率㊂研究了多种常用的手部装置,分析并研究了其设计方案㊁性能和适用领域㊂介绍了在实际工程应用中,选择码垛机械手以及机械手手部的考虑因素和方法㊂关键词:码垛机械手;手部装置;机械夹持;真空吸盘中图分类号:TP241DesignandSelectionforHandDeviceofPalletizingManipulatorXIEBo1,DENGGuangji2(1 TheOpenUniversityofGuangdong/GuangdongPolytechnicInstitute,GuangzhouGuangdong510091,China;2 Schmalz(Shanghai)Co.,Ltd.,Shanghai201210,China)Abstract:Palletizingmanipulatorisacommonautomatichandlingequipment,itsterminalisahanddevice.Palletizingandun⁃palletizingareallperformedthroughhanddevice.Byconfiguringaappropriatehanddevice,theperformanceandefficiencyofpalleti⁃zingmanipulatorcanbeeffectivelyimproved.Avarietyofcommonusedhanddeviceswerestudied,andthedesign,performanceandapplicationfieldswereanalyzedandstudied.Theconsiderationfactorsandmethodstoselectthepalletizermanipulatorandthehanddeviceinpracticalengineeringapplicationwereintroduced.Keywords:Palletizingmanipulator;Handdevice;Mechanicalclamping;Vacuumsuction0㊀前言机械手是工业发展的主要方向之一,它可以满足装配㊁码垛㊁拣选㊁拾取㊁搬运㊁上下料㊁点焊等复杂工作岗位的要求,具有响应时间短㊁重复定位精度高㊁产品标准化高㊁货运周期短㊁品牌多样性㊁配套产品丰富等优点,能在很大程度上节省人工和空间㊁提升产品质量和生产效率,被广泛应用于各行业㊂码垛机作为一种常见的自动化搬运设备,主要用于工业产品的堆叠,即把已经打包好的产品按照一定的排列码放到托盘或者栈板上进行自动多层堆码[1]㊂将机械手应用于码垛工位就可以得到码垛机械手,与传统的机械式码垛机相比,它在智能程度方面有很大的提升㊂为了将产品精准㊁快速地移动至某一位置上,码垛机械手需要完成提取㊁夹取㊁吸附㊁提升等一系列动作,其中几个动作都是由机械手的手部装置实现的㊂1㊀机械式手部装置码垛机械手的手部装置主要用来抓取㊁握紧或夹持搬运产品㊂目前,常见的码垛机械手手部的配置通常为机械式或吸附式,主要根据搬运产品的包装特性来设计㊂工业生产中常见的产品包装有:纸箱㊁袋子㊁桶㊁罐㊁塑料盒/箱等,大体可以划分为3大类:纸箱包装㊁料袋包装㊁桶料包装,如图1所示㊂在实际生产过程中,不同类型的包装采用不同的手部㊂即使同类型的包装,也无法依靠一个手部完成所有工作㊂例如纸箱包装,其大小㊁纸质㊁包装方法等都因产品不同而变化,所以需要根据条件配置多个手部㊂给码垛机械手配置合适的手部,可以最大化满足生产需要㊂图1㊀包装类型1 1㊀平移夹持式手部设计夹持式手部适用于具有形状规则㊁表面粗糙特点的纸箱包装类产品的搬运㊂为扩大手部的通用性,将它设计为平移型,如图2(a)所示㊂当它在夹持时与产品进行面接触,松开后手爪有一定距离的开距㊂通过驱动来拉伸一侧的手爪或使两侧手爪同步运动,从而保证产品顺利进入或脱开手爪㊂手爪为可靠地夹牢产品,需要有合适的夹紧力㊂夹紧力可根据FNȡK1ˑK2ˑK3ˑG计算得到,其中K1为安全系数㊁K2为工作情况系数㊁K3为方位系数㊁G为产品重力㊂夹紧力由驱动提供,但它受到搬运产品和包装情况的影响,因为过大的夹紧力可能损坏包装或产品㊂手部的驱动力Fp在同一夹紧力要求下,会因传动机构不同而变化,主要通过分析具体传动机构的力系平衡获得㊂另外,为避免产品在搬运过程中出现掉落现象,需要在单爪或双手爪上增加底托结构,以保证产品安全,如图2(b)所示㊂图2㊀气动驱动平移夹持式手部平移夹持式手部驱动一般选择气动或伺服[2]㊂气动驱动的制造成本低㊁维护成本低,但会增加手部质量,影响机械手的搬运负载㊂在手部装置固定后,如果搬运产品的尺寸和质量发生变化,只能通过调节供气压力来修改夹紧力,在变化很大的情况下无法满足图3㊀伺服驱动平移夹持式手部要求㊂伺服驱动平移夹持式手部如图3所示,其制造成本高㊁维护成本高,整体质量较轻,对机械手搬运负载的影响低,可以在电机的控制器上轻易地调节螺距来控制夹紧力,以满足搬运产品的尺寸和质量变化㊂平移夹持式手部的手爪可以设计为整体式(如图2所示),也可以设计为镂空式(如图3所示)㊂镂空式手爪虽然可以减少材料的使用㊁减轻自重,但同时会减小手爪与搬运产品之间的接触面积,从而降低承载能力,所以不适合于重载㊁表面光滑的搬运产品或包装㊂对于具有形状不规则特点的桶料包装类产品,一般也采用平移夹持式手部进行搬运,只是手爪要针对桶料包装的形状和尺寸进行特殊设计,通常设计为V形[3]㊂1 2㊀回转抓取式手部设计图4㊀半刨型回转抓取式手部对于具有形变量大㊁规则不一特点的料袋包装产品的搬运,需要将手部设计为回转抓取式㊂将手爪结构设计为全刨或半刨型(如图4所示),通过驱动来控制手爪的回转,以实现产品抓取时的收放,并避免损坏料袋包装,同时确保料袋变形小㊁搬运平稳㊂对于搬运不同尺寸的料袋包装产品,在满足驱动力的条件下,只需修改手爪的强度和尺寸就可以实现㊂回转抓取式手部夹紧力FN和驱动力Fp的计算类同平移夹持式手部,其驱动一般选择气动或伺服㊂2 吸附式手部装置码垛机械手的机械式手部在抓取工件的形状上通用性比较好,但对于特殊包装㊁特殊形状的产品而言,存在一定的局限性㊂吸附式手部与机械式手部相比,其功能类似但更丰富㊂机械式手部只有码垛功能,而吸附式手部有码垛和拆垛功能㊂它们的原理和配置也不一样,吸附式手部主要利用真空来吸附产品并完成搬运㊂对于平整面产品,如金属板㊁玻璃㊁高纤板㊁板式板材等,吸附式手部有着天然的优势,也同样适合于纸箱包装和料袋包装产品的搬运㊂另外,真空吸附具有污染小㊁成本低㊁效率高的特点㊂吸附式手部的设计主要包括真空产生方式的选择㊁真空回路的设计,以及针对不同工件的吸盘类型配置㊂2 1㊀分散式吸盘手部设计真空主要通过真空泵㊁真空发生器㊁真空鼓风机实现[4],产品的吸附由真空吸盘来实现㊂(1)真空发生器分散式手部设计真空发生器分散式手部的气动回路设计如图5所示,主要包括气源处理元件和真空组件两大部分[1,4]㊂气源处理元件完成压缩空气的过滤和气压的调节㊂真空组件包括真空发生器㊁电磁阀㊁过滤器㊁消声器和吸盘等[5],主要用于真空的产生和控制㊂对真空发生器和吸盘都进行分散式结构设计,使单个真空发生器对应单个吸盘㊂㊃59㊃第6期谢波等:码垛机械手的手部装置设计与选用㊀㊀㊀图5㊀真空发生器分散式吸盘回路真空发生器分散式手部具有前期制造成本低㊁制作简便㊁真空气路独立不受旁路影响等优点;但产生的噪声较大,且增加了手部质量,影响机械手的搬运负载,后期耗气量大,转换电能成本高㊂真空发生器分散式手部如图6所示㊂图6㊀真空发生器分散式手部(2)真空泵/真空鼓风机分散式手部设计真空泵/真空鼓风机分散式手部的气动回路设计如图7所示,主要由气源处理元件和真空组件两大部分组成,与真空发生器分散式手部的区别在于真空产生装置以及真空回路㊂其真空由真空泵/真空鼓风机产生,真空的控制由电磁阀㊁开关㊁过滤器和单向阀实现㊂吸盘按照分散式结构设计,真空由真空产生装置集中供给和控制㊂图7㊀真空泵/真空鼓风机分散式吸盘回路真空泵/真空鼓风机分散式手部具有产生的真空压力高㊁抽吸量大,噪声低,真空能集中供给,后期无需耗气,电能消耗低等优点,但其前期制造成本高㊂分散式吸盘手部应用范围广,特别适合于面积小㊁负载重的纸箱类产品搬运㊂由于它的吸盘设计为分散式结构,大大增加了搬运产品时在尺寸上的通用性㊂例如,搬运大小不一的纸箱,只要控制每个吸盘就可以控制手部的工作区域,如图8所示㊂真空发生器分散式手部可以通过控制对应的真空发生器来控制吸盘,而真空泵/真空鼓风机分散式手部则需要在吸盘上增加单向阀来控制㊂图8㊀吸盘工作区域的控制2 2㊀集成式吸盘手部设计将分散式吸盘手部的吸盘进行模块化处理,可以得到集成式吸盘手部㊂针对不同类型的搬运产品,可以将吸盘模块化集成为不同的配置,例如:海绵吸盘㊁集成吸盘㊁带裙边吸盘等㊂并可以创造性地在吸附式手部装置中加入辅助夹具,将真空技术和机械夹具相组合,进一步提高手部的夹紧力㊂根据特定的要求,还可以在手部中增设各种附加功能,以实现个性化定制,例如碰撞检测㊁可中间层分离等㊂集成式吸盘手部如图9所示㊂图9㊀集成式吸盘手部(某SPZ真空搬运系统)㊃69㊃机床与液压第49卷因为集成式吸盘手部吸盘的模块化和类型化㊁与夹具的组合配置以及附加功能的扩展,使得其搬运产品的种类和尺寸范围很广,甚至可以做到产品变化时无需更换或调整吸盘㊂除此之外,它还具有样式紧凑㊁配管简单㊁组装方便㊁节能高效㊁噪声较低㊁设备维护成本低㊁质量轻不占用机械手负载等优势,但制造成本要求更高㊂2 3㊀特殊吸盘手部设计料袋包装产品的搬运可以通过机械式手部实现,也可以用吸附式手部㊂料袋包装具有形变量大㊁规则不一的特点,普通吸盘无法满足搬运要求;高真空的真空发生器由于真空压力越高,在发生泄漏后压力下降越严重,也无法满足搬运要求㊂选用施迈茨SG或RG吸盘,并配套具有低真空㊁高抽吸量性能的真空鼓风机,通过不断补偿抽吸来避免泄漏的问题,可以满足料袋包装产品的搬运㊂同样,它也适合于含有内袋的编织袋包装产品㊂施迈茨SG/RG吸盘气动回路设计如图10所示㊂与机械式手部搬运料袋包装产品相比,SG/RG吸盘手部可以在一定程度上解决因为料袋包装的负载㊁尺寸㊁填充程度㊁包装袋类型差异而需要对手部进行更换或调整的问题,也可以避免锋利的金属件破坏包装袋的情况㊂它具有方便快捷㊁搬运高效等优点,但噪声大㊁吸盘磨损消耗大㊂SG/RG吸盘真空手部如图11所示㊂图10㊀施迈茨SG/RG吸盘真空气路图11㊀SG/RG吸盘真空手部3㊀手部装置的选用实际工程应用中,码垛机是否选择机械手,除了使用需求以外,还要综合考虑空间㊁投入㊁成本回收等因素㊂在选择机械手的手部时,主要考虑搬运产品的包装特性㊂在机械手码垛机中,由于真空系统对于光滑平整的产品或包装具有天然的吸放优势,这类产品或包装的码垛应优先选择吸附式手部㊂另外,相比于机械式手部,吸附式手部功能更多㊁设计更简单㊁组装更方便㊁更高效㊁节能,但有噪声㊁吸盘磨损消耗大㊂例如,某厨房电器公司一年烤箱产能3300万台,10条工作线每天工作16h,一年330个工作日,即1h约需要搬运625台烤箱㊂在没有其他因素限制的情况下,选择机械手码垛机是最适合的㊂烤箱包装为纸箱,质量10 25kg,纸箱形状规则㊁表面平整,且尺寸多,所以选择集成式吸盘手部是最合适的㊂4㊀结束语码垛机械手是一种常见的自动化搬运设备,其码垛和拆垛功能都需要通过手部装置来实现㊂本文作者重点研究了码垛机械手常用手部装置,主要包括平移夹持式手部㊁回转抓取式手部㊁真空发生器分散式手部㊁真空泵/真空鼓风机分散式手部㊁集成式吸盘手部以及特殊吸盘手部㊂另外,介绍了实际工程应用中,选择码垛机械手以及机械手手部的考虑因素和方法㊂实践表明,用上述方法来选择和设计码垛机械手的手部装置可行的㊂参考文献:[1]谢波,邓广基.码垛机械手的真空搬运系统设计及其故障分析[J].机床与液压,2019,47(7):117-120.XIEB,DENGGJ.Designandfailureanalysisofvacuumhandlingsystemforpalletizingmanipulator[J].MachineTool&Hydraulics,2019,47(7):117-120.[2]王建军.搬运机械手仿真设计和制作[J].机械设计与制造,2012(9):146-148.WANGJJ.Simulationdesignandmanufactureofhandingmanipulator[J].MachineryDesign&Manufacture,2012(9):146-148.[3]赵碧,巴鹏,徐英凤.气动上下料机械手手部结构的设计与分析[J].沈阳理工大学学报,2006,25(6):58-60.ZHAOB,BAP,XUYF.Designandanalysisofthefiner sstructureofpneumaticmanipulator[J].TransactionsofShe⁃nyangLigongUniversity,2006,25(6):58-60.[4]SMC(中国)有限公司.SMC培训教材:现代实用气动技术[M].北京:机械工业出版社,2003.[5]孙秀茹,邓丰山.基于气压传动的搬运机械手设计研究[J].液压气动与密封,2019,39(4):38-43.SUNXR,DENGFS.Researchondesignofhandlingma⁃nipulatorwithpneumatictransmission[J].HydraulicsPneumatics&Seals,2019,39(4):38-43.(责任编辑:张楠)㊃79㊃第6期谢波等:码垛机械手的手部装置设计与选用㊀㊀㊀。
施迈茨真空发生器SXMP30操作说明
一、复位
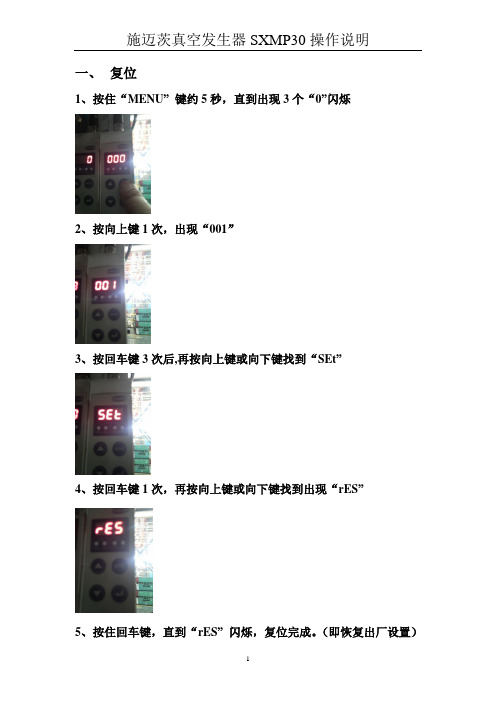
1、按住“MENU”键约5秒,直到出现3个“0”闪烁
2、按向上键1次,出现“001”
3、按回车键3次后,再按向上键或向下键找到“SEt”
4、按回车键1次,再按向上键或向下键找到出现“rES”
5、按住回车键,直到“rES”闪烁,复位完成。
(即恢复出厂设置)
二、清零(即将当前大气压调为0)
1、按“MENU”键1次,再按再按向上键或向下键找到“CAL”
2、按回车键1次,出现“0”,清零完成。
1、按住“MENU”键约5秒,直到出现3个“0”闪烁
2、按向上键1次,出现“001”
3、按回车键3次后,再按向上键或向下键找到“bLo”
4、按回车键1次后, 再按向上键或向下键找到“E-t”
5、按回车键1次确认。
1、按“MENU”键1次,再按向上键或向下键找到“tbL”
2、按回车键1次,出现“10”即原厂设置吹气时间是0.10秒
3、根据需要,再按向上键或向下键设定吹气时间后,按回车键1次确认。
(设定范围是0.01 到2.5秒,显示为1~250)
注意:通过上述两个步骤就可以设定外部吹气的时间,不再需要改变机械手的程序中加时间延迟了。
若设定外部吹气功能和时间后进行过复位,外部吹气功能会被取消,回到出厂设置,需要重新设置。
施迈茨真空讲座

集成式发生器
抽真空速度 – 阀芯内径10
- 差距取决于阀芯内的第 二级的止回片质量
- 脏污会高度影响此效果
p1 p2
• 由于压力差,工件被反压在吸盘上
• Δp = p1 – p2 • 作用力与压力差和有效面积成比例关系、 • F ~ Δp and F ~ A F = Δp x A
2020/10/21
-- 精品--
11
真空吸盘
- 功能原理 -
真空吸盘的重要特性
内部容积
内部容积:真空吸盘被抽空的内部容积,直接影响抽气时间。
典型的应用区域: 搬运狭长而且抓取面很小的工件:如 管件,几何形工 件,木条,窗架,纸箱,锡箔/热塑包装的产品。
2020/10/21
-- 精品--
18
真空吸盘
- 材料 -
选择真空吸盘的材料
标准 • 抗磨损耐用 • 柔韧性防止永久变形 • 抗侵蚀性 • 可抵抗: – 臭氧 –油 – 燃料 – 酒精 和乙醇 – 溶剂 – 酸性物质 • 抗高温 (短期/长期) • 不含硅胶 • 不含 PWIS(水性油漆干扰物) • 肖氏硬度 • 冲压行业 • 可用于食品行业
22
真空发生器
-气动式真空发生器 -
气动真空发生器的工作原理
工作原理 • 因此,在真空入口和喷嘴后部接收处之间的区域中产生了真空。 • 空气就由真空入口D处被“吸入”了真空发生器。 • 被“吸入”的空气,同压缩空气一起,通过消音器离开了真空发生器。
2020/10/21
真空吸附装置
真空吸附技术介绍及应用近年来,真空吸附技术在工业自动化生产中的应用越来越广泛。
真空吸附是利用真空发生装置产生真空压力为动力源,由真空吸盘吸附抓取物体,从而达到移动物体,为产品的加工和组装服务。
对任何具有较光滑表面的物体,特别是那些不适合于夹紧的物体,都可使用真空吸附来完成。
真空吸附已广泛应用于电子电器生产、汽车制造、产品包装、板材输送等作业中。
在一个典型的真空吸附系统中,常用的元件有:真空发生装置(真空泵或真空发生器),真空开关,真空破坏阀,真空过滤器和真空吸盘等。
一、真空发生装置真空发生装置是产生真空的元件,有真空泵和真空发生器两种类型。
1.真空泵真空泵的结构形式和工作原理与空气压缩机相类似,在气动系统中多采用容积型真空泵,如回转式真空泵、膜片式真空泵和活塞式真空泵。
2.真空发生器真空发生器由于它获取真空容易,结构简单,体积小,无可动机械部件,使用寿命长,安装使用方便,因此应用十分广泛。
真空发生器产生的真空度可达88 kPa,尽管产生的负压力(真空度)不大,流量也不大,但可控、可调,稳定可靠,瞬时开关特性好,无残余负压,同一输出口可正负压交替使用。
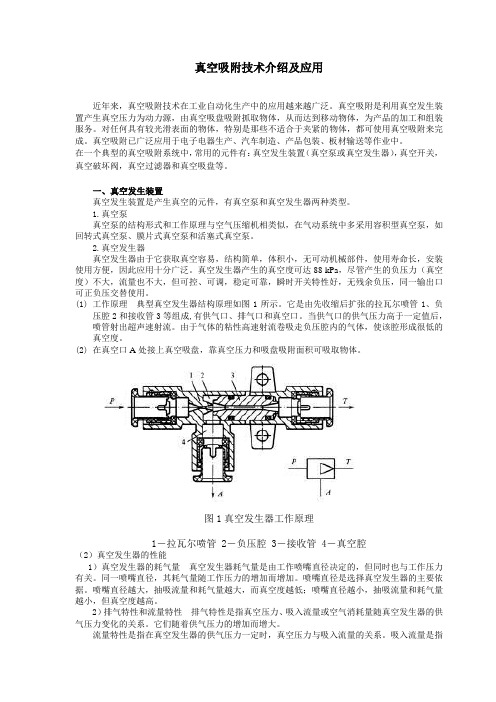
(1)工作原理典型真空发生器结构原理如图1所示。
它是由先收缩后扩张的拉瓦尔喷管1、负压腔2和接收管3等组成,有供气口、排气口和真空口。
当供气口的供气压力高于一定值后,喷管射出超声速射流。
由于气体的粘性高速射流卷吸走负压腔内的气体,使该腔形成很低的真空度。
(2)在真空口A处接上真空吸盘,靠真空压力和吸盘吸附面积可吸取物体。
图1真空发生器工作原理1-拉瓦尔喷管 2-负压腔 3-接收管 4-真空腔(2)真空发生器的性能1)真空发生器的耗气量真空发生器耗气量是由工作喷嘴直径决定的,但同时也与工作压力有关。
同一喷嘴直径,其耗气量随工作压力的增加而增加。
喷嘴直径是选择真空发生器的主要依据。
喷嘴直径越大,抽吸流量和耗气量越大,而真空度越低;喷嘴直径越小,抽吸流量和耗气量越小,但真空度越高。
07_特殊吸盘

Innovative Vacuum Automation
17
特殊吸盘
-晶片吸盘 SWG -
晶片吸盘 SWG 应用实例
光伏产业电池搬运
2014-12-18 Innovative Vacuum Automation 18
特殊吸盘
-晶片吸盘 SWG -
晶片吸盘 SWG 应用实例
2014-12-18
Innovative Vacuum Automation
2
特殊吸盘
- 目录 -
非接触吸盘 SBS
晶片吸盘 SWG
磁性吸盘 SGM
康恩达效应吸盘 SCG
针式吸盘 SNG
2014-12-18
Innovative Vacuum Automation
3
特殊吸盘
- 非接触吸盘 SBS -
非接触吸盘 SBS
设计 • 铝质机身 • 基于伯努利原理,集成了真空发生装置 无需真空发生器 • 吸盘悬浮于空气垫上 • 垂直和水平气压连接 • 带有3个橡皮垫或者1个橡胶缓冲层来承担水平 力,对薄工件不会造成变形 • 直接用弹簧缓冲支杆安装或者4个螺丝连接 • 4 种尺寸: Ø 20, 30, 40 和 60 mm
典型应用领域 • 轻接触搬运敏感工件,如纸张,薄片,木材内 衬,导电板,晶片和太阳能电池。 • 轻薄透气性工件的分离
2014-12-18 Innovative Vacuum Automation 4
特殊吸盘
-非接触吸盘 SBS -
非接触吸盘 SBS 优势 • 搬运接触少 • 流量高 • 轻薄透气性工件分离安全
Innovative Vacuum Automation
特殊吸盘
- 功能和应用 -
施迈茨真空发生器参数设置
施迈茨真空发生器参数设置1. 泵速(Pumping speed)泵速表示单位时间内真空泵抽取气体的能力。
施迈茨真空发生器通常可以通过调整抽气速度来控制泵速。
泵速的选择应根据具体实验或工艺的需求来确定,通常需要考虑到被抽空容器的体积、泵的类型和使用环境等因素。
较大的泵速可以更快地抽取气体,但也可能造成能量消耗过大、泵附带的气体过多等问题。
抽气时间是指将被抽空容器抽取到目标真空度所需的时间。
它与泵速、容器体积以及初始气体压力有关。
一般来说,抽气时间应尽量缩短,以提高效率。
但在操作过程中也要考虑到被抽空容器的密封性和泵的限制,以避免泄漏或超负荷运行等问题。
3. 真空度(Ultimate pressure)真空度是指在设定的时间内能够被抽取到的最低气压。
施迈茨真空发生器通常可以通过高效过滤装置和吸附剂来提高真空度。
在科研实验中,通常需要更高的真空度以保证实验的准确性;而在工业生产中,则需要根据具体工艺的要求来确定真空度。
4. 清洁度(Cleanliness)清洁度指的是设备表面的杂质和污染物的含量。
施迈茨真空发生器的清洁度通常可以通过多级过滤器、沉淀装置和蒸发器等来提高。
在一些对杂质敏感的实验或工艺中,高清洁度的真空发生器是必需的。
5. 能耗(Energy consumption)能耗是指真空发生器在工作过程中消耗的能量。
施迈茨真空发生器通常采用电力作为能源,其能耗与泵速、抽气时间以及环境温度等因素有关。
为了降低能耗,可以选择能效较高的真空发生器或通过控制抽气速度提高能源利用率。
总之,施迈茨真空发生器的参数设置需要根据具体的需求来确定,包括泵速、抽气时间、真空度、清洁度和能耗等因素。
合理的参数设置可以提高设备的效率和性能,同时减少能源的消耗,为实验或工艺的顺利进行提供保障。
培训系列之7(杨乃恒):高真空与超高真空获得设备
Vacuum and Fluid Engineering Research Center of Northeastern University, China
泵的实际抽速小于理论抽速,并与入口压
强有关。泵口在一个有限的工作压强范围 内工作,超过此范围抽速减少到零。目前 还没有一种泵能从大气压到超高真空的整 个压强范围内工作。如工作在高真空区域 内就称作高真空获得设备,或工作在超高 真空区域的就称超高真空获得设备。由于 工作压强范围不同就出现了各种不同的真 空获得设备。
Vacuum and Fluid Engineering Research Center of Northeastern University, China
普通型扩散泵与机械泵组成的机组可使 系统压强降到10-5Pa,即达到高真空状态。 改进型扩散泵与机械泵组成的机组,可使 系统压强降低到10-8Pa,即超高真空状态。 这说明一种泵有可能既是高真空获得设备, 又是超高真空获得设备。现代的离子泵、 升华泵、吸附泵和低温泵等,能使很大的 被抽系统抽到超高真空状态,且可以满足 不同气体种类的要求。 涡轮分子泵与机械泵的组合,既能获得高 真空也能非常迅速地抽到10-8Pa的超高真 空。 本节课介绍各种高真空泵和超高真空 泵的性能和使用规则
p2 exp( uL D) p1
1
Vacuum and Fluid Engineering Research Center of Northeastern University, China
式中下标1为被抽气体,2为抽气流体。由
此可知,较轻的气体压缩比是很低的。
M1 M 2 0.5 1 2 2 3 D ( RT ) ( ) 1/2 8(2 ) M 1M 2 2
施迈茨吸破一体阀说明书
施迈茨吸破一体阀说明书摘要:1.施迈茨吸破一体阀概述2.施迈茨吸破一体阀的结构特点3.施迈茨吸破一体阀的工作原理4.施迈茨吸破一体阀的应用领域5.施迈茨吸破一体阀的安装与维护正文:施迈茨吸破一体阀是一种具有高性能、结构简单、使用方便的阀门,广泛应用于各种工业领域。
该阀门采用一体化设计,集吸气、吸气破泡、调节等功能于一身,能够满足各种工况的需求。
施迈茨吸破一体阀的结构特点主要体现在以下几个方面:首先,采用全不锈钢材质,具有良好的耐腐蚀性和抗氧化性,可以长时间稳定工作。
其次,内部结构采用独特的设计,使阀门在吸破过程中具有较小的阻力,提高了吸气效率。
此外,施迈茨吸破一体阀还具有体积小、重量轻、安装方便等优点。
施迈茨吸破一体阀的工作原理是利用压缩空气作为动力,通过调节阀门开口度来实现吸气、吸气破泡等功能。
当压缩空气进入阀门时,会产生一定的压力,使阀门内部的隔膜振动,从而实现吸气。
当隔膜振动到一定程度时,阀门内部的破泡孔会打开,将气泡排出,实现吸气破泡。
通过调节压缩空气的压力和阀门开口度,可以实现对吸气流量的精确控制。
施迈茨吸破一体阀的应用领域非常广泛,主要应用于以下行业:一是食品工业,如饮料生产线、真空包装机等;二是医药行业,如制药设备、注射器等;三是电子行业,如半导体设备、液晶面板生产线等;四是环保行业,如污水处理设备、气体收集系统等。
施迈茨吸破一体阀的安装与维护非常简便。
在安装时,只需将阀门与相应的管道连接,并接通压缩空气源即可。
在维护时,定期检查阀门的运行状况,如发现故障,及时进行排除。
同时,要保持阀门的清洁,避免杂质进入阀门内部,影响其正常工作。
总之,施迈茨吸破一体阀凭借其独特的结构、高效的性能和广泛的应用领域,在工业领域具有很高的实用价值。
施迈茨真空炉操作流程

施迈茨真空炉操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!施迈茨真空炉操作流程一、准备工作阶段。
在进行真空炉操作之前,需要进行一系列准备工作。
施迈茨真空发生器参数设置
施迈茨真空发生器参数设置
施迈茨真空发生器的参数设置主要包括以下几个方面:
1. 真空度:施迈茨真空发生器能够实现的最高真空度取决于使用的
泵和气密密封系统。
通常需要根据空间内部温度和压力等因素对真空度进
行调整。
一般来说,良好的工作状态下,真空度应该在10^-3~10^-5 mbar之间。
2.油蒸汽排放速率:确定排放速率的主要因素是泵类型和油质量。
在
工作条件下,油蒸汽排放速率的高低将直接影响施迈茨真空发生器的性能
和耗能量。
为此,必须设定油气分离器的大小和使用油样品的频率。
3.环境温度:施迈茨真空发生器工作期间的环境温度必须在设定范围内,否则会影响性能,甚至造成损坏。
一般而言,施迈茨真空发生器的操
作温度范围为+5°C至+40°C。
4.水温:水温设置必须在适当的范围内,以确保施迈茨真空发生器在
正常范围内工作。
应根据使用情况设置水温,通常在15°C至25°C之间。
5.工作模式:施迈茨真空发生器的工作模式应根据实际情况选择。
常
见的工作模式包括常压模式、渐进升压模式、高速排气模式和高压抽取模
式等。
必须根据实际使用情况决定最佳工作模式。
海绵吸具可用性分析

海绵吸具可用性分析——烧结砖搬运1 现状分析公司致力于墙材行业的物流设备开发、解决方案提供,例如蒸养砖转运和定点输送设备、烧结砖散垛转运和定点转运设备、轮式转运设备、烧结砖整理实心垛自动运输线等,但采用的执行装置(末端抓取部件)主要是剪刀式夹具和平行式夹具。
整垛搬运和转运技术现已有成熟的应用,而烧结砖垛的整理——即从窑炉中出来的散装花垛转变为便于运输和存储的实心砖垛,尚未有成熟的产品提供给客户。
按照公司对于烧结砖垛整理方面的系统设计理念,工作流程如下:1)拆垛:手工4块或5块将烧结砖从花垛上取下,或机械整层夹持,用外力将待取砖层与其粘连的下层砖层分开;2)转运:利用输送带或电机驱动的推板将取下砖列/砖层运至带码实心垛工位;3)码垛:利用机械手或电机驱动的推板将砖层整齐码放在码垛工位。
以上述工作流程为例,烧结砖粘连程度以及砖垛整体变形或有不同,但是必然存在,手工拆垛最方便也最原始,属于机械无法准确定位或定位难度太大或成本过高;机械拆垛项目正在试验当中,应能在近期解决。
转运和码垛如使用机械手完成,应可以通过使用导轨完成长行程的转移,此技术比较成熟,在此不再赘述。
那么,剩下需要考虑的便是码垛环节。
码垛环节在技术上并无实现的难度,现有的码垛、或夹持方式在前文中已有描述,属于可以改进或说需要改进的方面。
改进的方向为:1)集成化,具备好的互换性;2)轻量化,便于操作;3)低成本,便于开拓市场;4)高可靠,便于市场推广和业务扩展。
从夹持方式上看,机械夹持施力点为烧结砖的长边两侧,利用固定于夹持器上的弹性体(例如聚氨酯)的自身变形所提供的反作用力生成抵抗重力的摩擦力来夹紧砖层,为了保证必要的夹紧力,夹持器夹板的刚性、剪刀式连接部件的强度等都需要考虑到,否则会产生变形、扭曲的问题。
2 市场调研以下为与两家有成熟产品的沟通后得到的信息:1.施迈茨a)在国内没有同类产品使用,所有的应用客户均在外国;b)在上海的制造基地仅为装配工厂,不提供加工;c)其海绵吸盘组件的部件完全进口,没有国产化,导致成本高昂(据称1平米吸盘组件价格在3万以上),非我公司意向客户所能承受。
德国施迈茨属加工真空夹具系统

Recognition in the competition for the Innovation Prize of the State of Baden-Württemberg (2006)
产品 & 服务
真空元器件
Effiziente Aufspannsysteme
如何根据工件选择 Matrix-Plate真空工作平台
形状规则的工件:
形状复杂的工件:
• 简单几何形状 • 工件没有通孔 • 工件宽度 > 30 mm 推荐: Æ 方块规格尺寸 25x25 mm
• 复杂集合形状 • 工件有许多通孔 • 工件宽度 < 30 mm 推荐: Æ 方块规格尺寸 12,5x12,5 mm
Effiziente Aufspannsysteme
Matrix-Plate 金属加工真空装夹系统
谢谢大家的关注!!!
Effiziente Aufspannsysteme
金属加工行业应用案例
Effiziente Aufspannsysteme
Matrix-Plate 金属加工真空装夹系统
金属加工行业应用案例
Effiziente Aufspannsysteme
Matrix-Plate 金属加工真空装夹系统
金属加工行业应用案例
Effiziente Aufspannsysteme
Effiziente Aufspannsysteme
Matrix-Plate 金属加工真空装夹系统
总结
优势…
• 自动紧急停止功能 • 内置真空监测表,真空开关
• 自动节能功能
• 可与机床控制程序集成,实现真空装夹 系统的自动化控制
施迈茨(中国)有限公司介绍企业发展分析报告模板

Enterprise Development专业品质权威Analysis Report企业发展分析报告施迈茨(中国)有限公司免责声明:本报告通过对该企业公开数据进行分析生成,并不完全代表我方对该企业的意见,如有错误请及时联系;本报告出于对企业发展研究目的产生,仅供参考,在任何情况下,使用本报告所引起的一切后果,我方不承担任何责任:本报告不得用于一切商业用途,如需引用或合作,请与我方联系:施迈茨(中国)有限公司1企业发展分析结果1.1 企业发展指数得分企业发展指数得分施迈茨(中国)有限公司综合得分说明:企业发展指数根据企业规模、企业创新、企业风险、企业活力四个维度对企业发展情况进行评价。
该企业的综合评价得分需要您得到该公司授权后,我们将协助您分析给出。
1.2 企业画像类别内容行业空资质增值税一般纳税人产品服务计、生产真空设备、气压动力机械及元件、电子1.3 发展历程2工商2.1工商信息2.2工商变更2.3股东结构2.4主要人员2.5分支机构2.6对外投资2.7企业年报2.8股权出质2.9动产抵押2.10司法协助2.11清算2.12注销3投融资3.1融资历史3.2投资事件3.3核心团队3.4企业业务4企业信用4.1企业信用4.2行政许可-工商局4.3行政处罚-信用中国4.5税务评级4.6税务处罚4.7经营异常4.8经营异常-工商局4.9采购不良行为4.10产品抽查4.12欠税公告4.13环保处罚4.14被执行人5司法文书5.1法律诉讼(当事人)5.2法律诉讼(相关人)5.3开庭公告5.4被执行人5.5法院公告5.6破产暂无破产数据6企业资质6.1资质许可6.2人员资质6.3产品许可6.4特殊许可7知识产权7.1商标7.2专利7.3软件著作权7.4作品著作权7.5网站备案7.6应用APP7.7微信公众号8招标中标8.1政府招标8.2政府中标8.3央企招标8.4央企中标9标准9.1国家标准9.2行业标准9.3团体标准9.4地方标准10成果奖励10.1国家奖励10.2省部奖励10.3社会奖励10.4科技成果11 土地11.1大块土地出让11.2出让公告11.3土地抵押11.4地块公示11.5大企业购地11.6土地出租11.7土地结果11.8土地转让12基金12.1国家自然基金12.2国家自然基金成果12.3国家社科基金13招聘13.1招聘信息感谢阅读:感谢您耐心地阅读这份企业调查分析报告。
施迈茨SXMP真空发生器 ppt课件
G3/8“)
3.3
快速更换模块
3.4
双快速更换块
3.5
快速更换解锁杆
4.1
电气连接 2x M12, 5 针
4.2
电气连接 1x M12, 8 针
PPT课件
9
9
整改项目汇总 SXMP真空发生器面板:
PPT课件
10
10
整改项目汇总
按一下进入基本菜单,设定真空度数值
按住该键3秒以上进入二级菜单,设定发生器的各种功能
SMP/SXP真空产生装置基本设定简介
PPT课件
0
整改项目汇总 普通型真空SMP用于替换bilsing:
智能型真空SXMP用于替换Norgen:
PPT课件
1
1
整改项目汇总 普通型SMP的功能和设定:
PPT课件
2
结构: 1)吸气/吹气电磁阀 2)发生器本体 3)消音器 4)真空传感器 5)电缆
17
整改项目汇总
备注:在用SXMP代替SMART PUMP时请进行如下设定
1)外部吹气功能设定: 按住 MENU至少3秒.输入正确的 PIN.: 001 用 UP 或 DOWN 去选择blo. 用 UP 或 DOWN 选择E-T 按 ENTER 确认
。2)外部吹气时间的设定:
• 按MENU键. • 用 UP 或 DOWN 去选择tbl
PPT课件
8
8
整改项目汇总
1。1
基本模块 – 带吸气阀 NO... (常开)
1.2
基本模块 – 带吸气阀 NC... (常闭)
1.3
基本模块 – 带吸气阀 IMP... (双稳态, 以脉冲
切换)
2
真空知识及真空产品介绍
分路器
真空管
接头元件
2020/6/26
创新的真空自动化
42
汽车行业
2020/6/26
创新的真空自动化
43
木工行业
2020/6/26
创新的真空自动化
44
注塑行业
2020/6/26
创新的真空自动化
45
包装行业
2020/6/26
创新的真空自动化
46
CD光盘行业
2020/6/26
创新的真空自动化
创新的真空自动化
22
新型吸盘–磁铁吸盘SGM
2020/6/26
创新的真空自动化
23
新型吸盘–磁铁吸盘SGM
2020/6/26
创新的真空自动化
24
新型吸盘–磁铁吸盘SGM
磁铁吸盘SGM应用录像
2020/6/26
创新的真空自动化
25
安装部件
弹簧缓冲支杆
2020/6/26
铝型材
固定夹
挠性接头
创新的真空自动化
真空基础知识 及
Schmalz真空元件产品
真空基础知识
什么是真空 / 压力 ?
• 根据 DIN 28400标准: „真空是空气分子密度小于地面大气分子密度的一种状态。 当气体
的压力小于大气压力时可称之为真空。“
• 这意味着,我们可以利用周边压力与绝对压力之间压力 差。
•然而,这个压力差并不是在所有地方 都相同的。
2020/6/26
创新的真空自动化
14
吸盘概览
SAF - 扁平吸盘 (NBR), 圆形 SAB - 波纹形吸盘 (NBR),1.5 折,圆形 SAOF - 扁平吸盘(NBR), 椭圆形 SAOB - 波纹形吸盘(NBR),1.5折,圆形
非常规自旋轨道耦合玻色凝聚的拓扑激发

分类号:0469密级:无单位代码:10118研究生学位论文年月日论文题目(中文)非常规自旋轨道耦合玻色凝聚的拓扑激发论文题目(外文)Topological Excitations in Unconventional Spin-Orbit-Coupled Bose Condensates 研究生姓名岳虹霞学科物理学专业凝聚态物理学位类别硕士培养类型全日制导师姓名、职称刘永恺副教授培养单位物理与信息工程学院学位授予单位山西师范大学学位授予日期年月答辩委员会主席张东海教授评阅人非常规自旋轨道耦合玻色凝聚的拓扑激发中文摘要玻色-爱因斯坦凝聚(BEC )的实现为研究多种形式的拓扑激发和新奇量子相变提供了一个很好的研究平台。
尤其是人工合成自旋轨道耦合的实现极大的丰富了冷原子系统的研究,探索自旋轨道耦合BEC 中的新奇拓扑态成为冷原子物理和其他原子交叉领域的研究热点。
人们发现自旋轨道耦合不仅可以稳定各种各样的拓扑激发还可以产生新奇的量子相。
NIST 和Rashba 型自旋轨道耦合得到了人们的广泛研究。
之后人们提出了多种多样的规范场耦合模型,虽然由于实验条件许多模型尚未实现,但是依然是理论和实验工作者研究的动力源泉。
受这些研究结果的启发,本论文研究了在两组分BEC 中耦合其他形式自旋矢量和线动量的二维拓扑激发以及在spin-1BEC 中耦合SU (3)自旋轨道耦合的一维孤子激发。
揭示了不同种类的耦合形式会产生不同的新奇拓扑激发,并阐述了不同拓扑激发背后的物理机制。
我们的工作主要分为以下两个部分:(1)SU (3)自旋轨道耦合模型中一维拓扑激发利用数值模拟求解含SU (3)自旋轨道耦合项的spin -1BEC Gross-Pitaevskii 方程,通过和常规SU (2)自旋轨道耦合数值结果比较,我们发现SU (3)这种新型自旋轨道耦合,可以得到一种新奇孤子激发—多节点复合孤子。
我们详细的研究了这种新奇孤子激发的性质,以及产生的物理机制。
铝合金薄板零件夹具的设计
工业技术科技创新导报 Science and Technology Innovation Herald66铝合金薄板类零件是常见的工程产品,在家用电器、汽车等用品普遍得到应用。
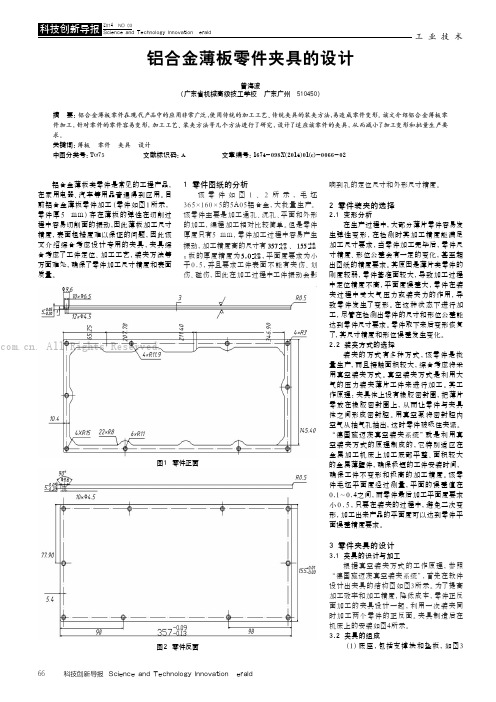
目前铝合金薄板零件加工(零件如图1所示,零件厚5 m m)存在薄板的弹性在切削过程中容易切削面的振动,因此薄板加工尺寸精度,表面粗糙度难以保证的问题,因此该文介绍综合考虑设计专用的夹具,夹具综合考虑了工件定位、加工工艺,装夹方法等方面难处,确保了零件加工尺寸精度和表面质量。
1 零件图纸的分析该零件如图1、2所示,毛坯365×160×5的5A05铝合金,大批量生产。
该零件主要是加工通孔、沉孔、平面和外形的加工,编程加工相对比较简单。
但是零件厚度只有5 m m,零件加工过程中容易产生振动,加工精度高的尺寸有、;板的厚度精度为,平面度要求为小于0.5,并且要求工件表面不能有夹伤、划伤、碰伤,因此在加工过程中工件振动会影响到孔的定位尺寸和外形尺寸精度。
2 零件装夹的选择2.1 变形分析在生产过程中,大部分薄片零件容易发生弹性变形,在检测时其加工精度能满足加工尺寸要求,当零件加工完毕后,零件尺寸精度、形位公差会有一定的变化,甚至超出图纸的精度要求。
其原因是薄片类零件的刚度较弱,零件基准面较大,导致加工过程中定位精度不高,平面度误差大,零件在装夹过程中受大气压力或装夹力的作用,导致零件发生了变形。
在这种状态下进行加工,尽管在检测出零件的尺寸和形位公差能达到零件尺寸要求。
零件取下来后变形恢复了,其尺寸精度和形位误差发生变化。
2.2 装夹方式的选择装夹的方式有多种方式,该零件是批量生产,而且接触面积较大,综合考虑将采用真空装夹方式。
真空装夹方式是利用大气的压力装夹薄片工件来进行加工。
其工作原理:夹具体上设有橡胶密封圈,把薄片零放在橡胶密封圈上,从而让零件与夹具体之间形成密封腔。
用真空泵将密封腔内空气从抽气孔抽出,这时零件被吸住夹紧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
搬运碟形的不平整的工件,如:汽车金属板,纸箱,塑料 件,铝箔/热塑包装的产品,电子零件。
2020/8/8
Innovative Vacuum Automation
16
真空吸盘
- 主要类型 -
波纹吸盘
波纹吸盘的技术参数
• 当在相同的直径下,为什么波纹吸盘的吸力小于扁平吸盘? • 有效的吸取面积:
典型的应用区域: 搬运狭长而且抓取面很小的工件:如 管件,几何形工 件,木条,窗架,纸箱,锡箔/热塑包装的产品。
2020/8/8
Innovative Vacuum Automation
18
真空吸盘
- 材料 -
选择真空吸盘的材料
标准 • 抗磨损耐用 • 柔韧性防止永久变形 • 抗侵蚀性 • 可抵抗: – 臭氧 –油 – 燃料 – 酒精 和乙醇 – 溶剂 – 酸性物质 • 抗高温 (短期/长期) • 不含硅胶 • 不含 PWIS(水性油漆干扰物) • 肖氏硬度 • 冲压行业 • 可用于食品行业
6
真空技术基础知识
-工业搬运中的真空 真空系统的组成元件
真空发生器
过滤和连接部件
安装部件
2020/8/8
开关和系统监控
控制阀技术
真空吸盘
Innovative Vacuum Automation
7
真空吸盘
真空吸盘
2020/8/8
Innovative Vacuum Automation
8
真空吸盘 - 应用和重要性 -
2020/8/8
Innovative Vacuum Automation
25
真空发生器
-气动式真空发生器 -
线性真空发生器 工作原理
压缩空气
排气
真空
压缩空气
2020/8/8
Innovative Vacuum Automation
真空
26
真空发生器
-气动式真空发生器 -
多级真空发生器
SEM型 • 具有多级文丘里喷嘴 • 抽吸能力强 • 效率高 • 在低真空区域,抽气时间短 • 抽吸能力: 332 l/min 至 2370 l/min • 阀和控制系统可选
在搬运技术中,过高的真空度是很不经济的
2020/8/8
Innovative Vacuum Automation
4
真空技术基础知识
-工业搬运中的真空 -
为什么要在搬运中使用真空?
在真空的帮组下,工件... • 提升 • 翻转 • 支撑 • 运送
2020/8/8
Innovative Vacuum Automation
2020/8/8
Innovative Vacuum Automation
11
真空吸盘
- 功能原理 -
真空吸盘的重要特性
内部容积
内部容积:真空吸盘被抽空的内部容积,直接影响抽气时间。
最小曲率半径
最小曲率半径:能够被吸盘抓起的工件最小半径。
2020/8/8
Innovative Vacuum Automation
达到50 mbar之前两个发生器速度相等 SCPs 15在更高的真空度抽真空明显快 SCPs 15达到安全的真空度(550 mbar)需要的时间比ZK2少30% SCPs 15达到节能功能开启的真空度(750 mbar)需要的时间比ZK2少30%
典型应用领域: 适用于搬运多孔透气性材料,如木材,板材或者绝缘材料
2020/8/8
Innovative Vacuum Automation
27
真空发生器
-气动式真空发生器 -
多级真空发生器
多级型真空发生器SEM的工作原理 • 通过多个文丘里喷嘴线性排列在一起而产生真空
1级
2级
3级
压缩空气
2020/8/8
– 吸取的工作面 – 比外径小
扁平吸盘
波纹吸盘
deff
deff
– 波纹吸盘中吸力和脱卸力有什么区别? – 在计算时哪个力重要?
2020/8/8
Innovative Vacuum Automation
17
真空吸盘
- 主要类型 -
椭圆吸盘
性能 • 最佳的利用可吸取面 • 适用于长的凸面工件 • 硬度增强的真空吸盘 • 尺寸小吸力大 • 像扁平和波纹吸盘一样通用 • 多样的吸盘材料 • 嵌入式结构有高的抓取力(盘型吸盘)
m 脏污会高度影响此效果
达到250 mbar之前两个发生器速度相等 SCPs 10在更高的真空度抽真空明显快 SCPs 10达到安全的真空度(550 mbar)需要的时间比ZK2少40% SCPs 10达到节能功能开启的真空度(750 mbar)需要的时间比ZK2少40%
集成式发生器
吸取能力 – 阀芯内径15
抽真空速度 – 阀芯内径07
m 差距取决于阀芯内的第 二级的止回片质量
m 脏污会高度影响此效果
ZK2A 07达到350 mbar稍微快一些 SCPs 07在更高的真空度抽真空明显快 SCPs 07达到安全的真空度(550 mbar)需要的时间比ZK2少40% SCPs 07达到节能功能开启的真空度(750 mbar)需要的时间比ZK2少40%
-真空的性质 -
力与压力的关系
力与压力是如何联系起来的呢? • 当一定的压力差作用于一定面积上时,此时作用力就产生了 • 它与作用在这一定面积上的压力差值为正或者为负没有关系。. • 作用力来自于与压力差与有效面积。
F = p x A
F=力
p = 压力差
A = 有效面积
• 计算实例: 扁平吸盘 PFYN80 的有效直径Ø =74 mm, 真空度 –0,6 bar F = 6 N/cm²x (7,4 cm)²x 3,14 x 1/4 = 260 N
• 正常条件下,海平面的空气压力为1013mbar
• 海拔高度为2000m时,空气压力为760mbar; 而在喜马拉雅山顶(8850m),空气压力只 有320mbar
• 因此,所能达到的最大真空度随着 海平面的升高而降低
2020/8/8
Innovative Vacuum Automation
2
真空技术基础知识
集成式发生器
吸取能力 – 阀芯内径10
ZK2A 10在250 mbar以下吸取流量大 在高于250 mbar情况下SCPs 10 吸取流量更大 针对不透气工件(如金属,玻璃,等等)需要大于600 mbar的真空度 多级式阀芯没有任何优势
集成式发生器
抽真空速度 – 阀芯内径10
m 差距取决于阀芯内的第 二级的止回片质量
24
真空发生器
-气动式真空发生器 -
线性真空发生器
性质 • 基于文丘里原理 • 压缩空气的流向和真空产生的方向沿着管子的方向在 一条直线上 • 轻质,集成式设计,安装位置可与吸盘接近 • 喷嘴尺寸: 0.5 到 0.9 mm
典型应用领域: 普遍用于直接位于吸盘上的真空系统e Vacuum Automation
真空讲座
- 真空技术 -
施迈茨真空培训
真空技术基础知识
-真空的性质 -
空气压力 空气压力于海平面的关系
• 空气压力就是空气的流体静压力
• 可描述为大气中在某一平面或者物体上空气柱的重量
• 空气压力与海平面有关,随着海拔的升高而降低 (平均每升高100m空气压力减小 12.5mbar)。
典型的应用区域:
搬运表面平整或稍微粗糙的扁平或轻微碟形的工件 ,如:金属板, 纸箱, 玻璃板, 塑料件和木板
2020/8/8
Innovative Vacuum Automation
15
真空吸盘
- 主要类型 -
波纹吸盘
特性 • 1.5折, 2.5折和 3.5折波纹 • 对与不平整的表面有良好的适应性 • 抓取工件时有提升的效果 • 不同高度的补偿 • 轻柔地抓取易损工件 • 柔软的底部波纹 • 吸盘的柄部和上部波纹硬度高 • 柔软的适应性强的锥形密封唇 • 底部支撑
应用和重要性
真空吸盘是工件与真空系统之间的连接元件。
所选真空吸盘的特性对整个真空系统的功能有基本的 影响
2020/8/8
Innovative Vacuum Automation
9
真空吸盘
- 结构图 -
真空吸盘的结构图
接头 可替换吸盘
安装尺寸 密封唇直径
密封法兰
吸盘柄 波纹
内部直径
内部结构
密封唇
5
真空技术基础知识
-工业搬运中的真空 -
为什么要在搬运中使用真空?
与其他搬运方式相比,真空搬运具有许多优势 以机械式搬运为例
• 对工件更加轻柔 – 无损伤 • 简单,通过真空开关可实现 “零部件控制” • 根据实际情况,单个夹具可被用于抓取不同的工件 • 成本低
2020/8/8
Innovative Vacuum Automation
12
真空吸盘
- 功能原理 -
真空吸盘的重要特性
密封唇的行程
密封唇的行程是指吸盘抽真空后压缩的距离。 它直接影响密封唇的相对运动。
吸盘的行程
吸盘被抽气时的提升效果。
2020/8/8
Innovative Vacuum Automation
13
真空吸盘
- 主要类型 -
主要类型 常用的类型
• 扁平吸盘
ZK2A 15在120 mbar以下吸取流量大 在高于120 mbar情况下SCPs 15 吸取流量更大 针对不透气工件(如金属,玻璃,等等)需要大于600 mbar的真空度 多级式阀芯没有任何优势
集成式发生器
抽真空速度 – 阀芯内径15
m 差距取决于阀芯内的第 二级的止回片质量