基于DSP的FIR数字滤波器的设计与实现
基于DSP的FIR数字滤波器_(设计实验)(汇编语言)
基于DSP 的FIR 数字滤波器 (设计实验)一、实验目的1.了解FIR (Finite Impulse Response 有限冲激响应)滤波器的原理及使用方法;2.了解使用MATLAT 语言设计FIR 滤波器的方法;3.了解DSP 对FIR 滤波器的设计及编程方法;4.熟悉在CCS 环境下对FIR 滤波器的调试方法; 二、实验原理数字滤波是DSP 的最基本应用,利用MAC (乘、累加)指令和循环寻址可以方便地完成滤波运算。
两种常用的数字滤波器:FIR (有限冲激响应)滤波器和IIR (无限冲激响应)滤波器的DSP 实现。
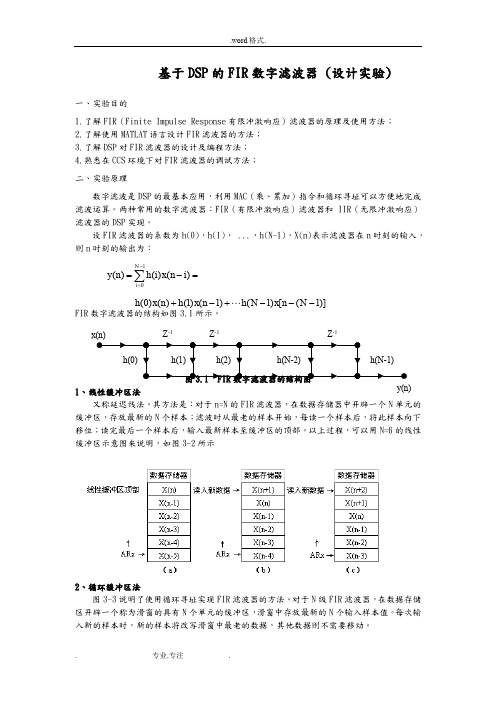
设FIR 滤波器的系数为h(0),h(1), ...,h(N-1),X(n)表示滤波器在n 时刻的输入,则n 时刻的输出为: FIR 数字滤波器的结构如图3.1所示。
1、线性缓冲区法又称延迟线法。
其方法是:对于n=N 的FIR 滤波器,在数据存储器中开辟一个N 单元的缓冲区,存放最新的N 个样本;滤波时从最老的样本开始,每读一个样本后,将此样本向下移位;读完最后一个样本后,输入最新样本至缓冲区的顶部。
以上过程,可以用N=6的线性缓冲区示意图来说明,如图3-2所示图3-2 N=6的线性缓冲区示意图2、循环缓冲区法图3-3说明了使用循环寻址实现FIR 滤波器的方法。
对于N 级FIR 滤波器,在数据存储区开辟一个称为滑窗的具有N 个单元的缓冲区,滑窗中存放最新的N 个输入样本值。
每次输入新的样本时,新的样本将改写滑窗中最老的数据,其他数据则不需要移动。
10()()()(0)()(1)(1)(1)[(1)]N i y n h i x n i h x n h x n h N x n N -==-=+-+---∑Z -1Z -1Z -1y(n)图3-3 FIR滤波器循环缓冲区存储器图三、实验内容与步骤设计一个FIR低通滤波器,通带边界频率为1500Hz,通带波纹小于1dB;阻带边界频率为2000Hz,阻带衰减大于40dB;采样频率为8000Hz。
基于DSP的FIR数字滤波器的研究与实现

N-1
Σ -n
H(z)= h(n)z
n=0
它的特点如下:
1)h(n)在有限个 n 值处不为零;
2)H(Z)在|z|>0 处收敛,极点全部在 Z=0 处;
3)非递归型结构;
4)h(n)为一个 N 点序列,Z=0 处为(N-1)阶极点,z→∞,有
[M ]. 北 京 :电 子 工 业 出 版 社 ,2004 [4]张建伟,展雪梅.FIR 数字滤波器的设计与实现[J].无线电工程,2010,
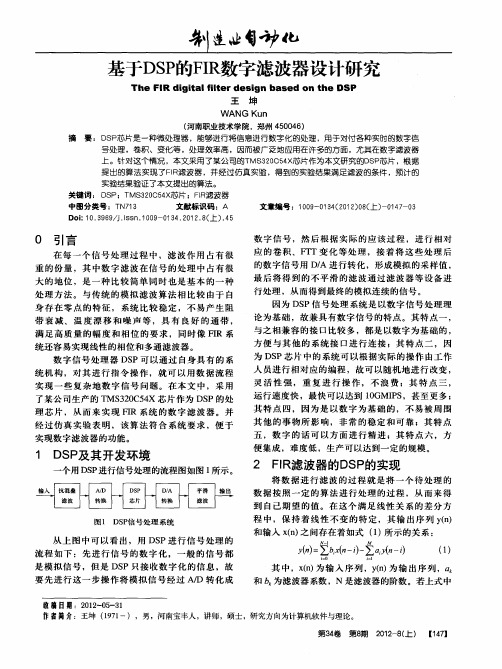
数字滤波器是指输入输出均为数字信号,通过数学运算关系 改变输入信号所含频率成分的相对比例或者滤除某些频率成分, 若其系统函数为 H(z),其脉冲响应为 h(n),对输入时间序列为 x (n),若输出时间序列为 y(n),则它们在时域内有如下关系:y(n) =h(n)*x(n),因此滤波器的设计就是如何设计出 h(n)。
hd
(n)=
sin[0.25π(n-τ)] π(n-τ)
,τ=(N-1)
/
2=10
图 1 分别画出用矩形 窗 和 Hamming 窗 设 计 的 h(n)及 其 两
种 窗 函 数 的 形 状 ,通 过 图 1 可 以 比 较 不 同 窗 函 数 时 的 h(n)的 对
称性、过渡带宽度和阻带最小衰减,由图 1 可见,海明窗的主瓣
乙 响 应
hd
(n)=
1 2π
π
jω jω
-π Hd (e )e dω,它 是 无 限 长 的 非 因 果 序 列 ,而
要设计的 h(n)是有限长的 FIR 数字滤波器,所 以 要 用 有 限 长 序
基于DSP的FIR数字滤波器设计
能 。事 实上 ,一个 实 际的应 用 系统 总存在 各种 干 扰 。而使 用D P 行 数 字信 号 处理 可 以从 噪 声 中 S进 提 取信 号 ,即对 一个具 有 噪声 和信号 的混 合 源进 行 采样 ,然后 经过 数字 滤波 器来 滤 除噪声 ,从而 提取 有用 信 号 。用D P 片实 现数 字 滤波 除 了具 S芯 有稳 定 性 好 、精 确 度 高 、不 受 外 界 影 响 等 优 点 外 ,还 具有灵 活性 好 等特点 ,因而可 通过 可 编程 D P 片 来 实现 数字 滤 波 的参 数修 改 ,进 而 十分 S芯
Y()= n () ()+ () ( - )+ n y()= 0 n 1 n1
…
+ A ) [ ^ ) : X( k ( ( n L1 2 h( L1 一( 】 ) n ) 1 - )
=
0
其对 应 的FR滤波器 的传递 函数 为 : I
一
k
) hk : () z
K= o
() 2
方便 地 改变 滤波 器 的特 性 。 目前 .基 于D P S 的数
字滤 波 已被 广泛应 用 于语音 、图像 、软件 无 线 电 等 领域 。
基于DSP实现的FIR低通滤波器
基于DSP实现的FIR低通滤波器FIR(有限脉冲响应)低通滤波器是一种常见的数字信号处理(DSP)滤波器。
它的设计和实现非常灵活,可以用于去除数字信号中高频成分,使得信号能在一定的频率范围内进行平滑处理。
FIR低通滤波器有很多种设计方法,其中最简单的方法是基于窗函数设计,例如矩形窗、汉宁窗、布莱克曼窗等。
这些窗函数的选择取决于滤波器的性能要求和频率响应的形状。
在DSP中,FIR低通滤波器的实现可以采用直接形式、级联形式、并行形式和迭代形式等多种结构。
其中直接形式是最简单和直观的实现方式,也是最容易理解和实现的一种结构。
直接形式的FIR低通滤波器由一个延迟线、一组乘法器和加法器组成。
延迟线用于延迟输入信号,乘法器用于对延迟后的信号进行调制,而加法器则将调制后的信号相加得到输出信号。
```----------------------,,,x(n) -->, Delay ,-->, Multiply,-->--+ Sum ,--> y(n)Line ,,,----------------------```在实现过程中,需要注意的是延迟线的设置和乘法器的系数。
延迟线的长度决定了滤波器的阶数,即滤波器对输入信号的响应范围。
乘法器的系数则决定了滤波器的频率响应,可以通过窗函数的选取来确定。
通常,FIR滤波器的实现可以通过查表法或者卷积法来实现。
查表法通过预先计算所有可能的输入组合,并将其存储在一张查找表中,以减少计算量。
卷积法则通过将输入信号和滤波器的冲击响应进行卷积运算来得到输出信号。
当实现FIR低通滤波器时,还需要考虑滤波器的性能指标和算法的优化。
常见的性能指标包括滤波器的截止频率、抗混叠性能、通带和阻带的幅频特性等。
算法的优化可以从以下几个方面考虑:乘法器的系数选择、滤波器结构的选择、滤波器长度的选择和存储器的优化等。
总之,基于DSP实现的FIR低通滤波器是一种常用的数字信号处理滤波器,它可以用于去除数字信号中的高频成分,平滑信号的频谱。
FIR滤波器及其DSP实现
FIR滤波器及其DSP实现FIR(Finite Impulse Response)滤波器是一种常见的数字滤波器,它具有有限的脉冲响应。
与IIR(Infinite Impulse Response)滤波器相比,FIR滤波器具有线性相位特性,并且可以实现稳定的滤波效果。
FIR滤波器的核心是其冲激响应,即滤波器的输出响应。
FIR滤波器的输出可以通过对输入信号和滤波器的冲激响应进行卷积来实现。
为了得到所需的滤波效果,需要设计滤波器的冲激响应。
常见的方法包括频域设计和时域设计两种。
频域设计方法主要利用频率响应来设计FIR滤波器的冲激响应。
这包括将所需滤波特性转化为频率域中的理想滤波器响应,然后通过反变换得到冲激响应。
常见的频域设计方法有窗函数法、最优逼近法和频带优化法等。
窗函数法是最简单的频域设计方法之一,通过将理想滤波器的频率响应与窗函数的频率响应相乘得到FIR滤波器的冲激响应。
常用的窗函数有矩形窗、汉宁窗、汉明窗等。
窗函数法的优点是简单易用,但实现的FIR 滤波器在频域存在较大的过渡带宽。
因此,需要根据具体应用需求选择合适的窗函数。
最优逼近法是一种基于最优化理论的频域设计方法。
它通过将所需滤波特性定义为目标函数,利用优化算法来最小化目标函数与实际滤波器响应之间的差距,从而得到FIR滤波器的冲激响应。
最优逼近法能够较好地满足滤波特性的要求,但计算复杂度较高。
时域设计方法主要通过对滤波器的冲激响应进行直接设计来实现。
常见的时域设计方法有零相位响应(Zero-Phase Response,ZPR)设计和线性相位设计。
零相位响应设计方法通过首先设计一个偶对称的冲激响应,并通过反转和平移来得到滤波器的冲激响应。
这样可以实现零相位的滤波效果。
零相位响应设计方法能够保持输入信号的相位信息,适用于对相位要求较高的应用,如音频信号处理。
线性相位设计方法主要通过对滤波器的延迟进行优化来实现。
线性相位设计方法能够使得滤波器的相位响应近似为线性函数,从而实现滤波器对不同频率的信号具有相同的延迟。
基于dsp的语音采集及滤波器设计
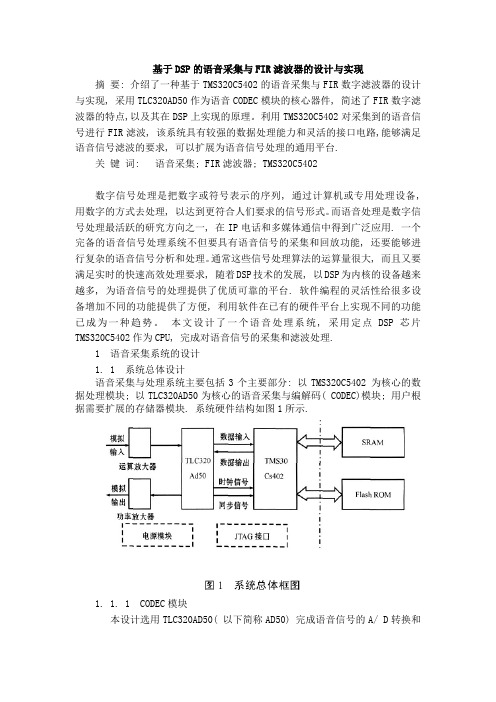
基于DSP的语音采集与FIR滤波器的设计与实现摘要: 介绍了一种基于TMS320C5402的语音采集与FIR数字滤波器的设计与实现, 采用TLC320AD50作为语音CODEC模块的核心器件, 简述了FIR数字滤波器的特点,以及其在DSP上实现的原理。
利用TMS320C5402对采集到的语音信号进行FIR滤波, 该系统具有较强的数据处理能力和灵活的接口电路,能够满足语音信号滤波的要求, 可以扩展为语音信号处理的通用平台.关键词: 语音采集; FIR滤波器; TMS320C5402数字信号处理是把数字或符号表示的序列, 通过计算机或专用处理设备, 用数字的方式去处理, 以达到更符合人们要求的信号形式。
而语音处理是数字信号处理最活跃的研究方向之一, 在IP电话和多媒体通信中得到广泛应用. 一个完备的语音信号处理系统不但要具有语音信号的采集和回放功能, 还要能够进行复杂的语音信号分析和处理。
通常这些信号处理算法的运算量很大, 而且又要满足实时的快速高效处理要求, 随着DSP技术的发展, 以DSP为内核的设备越来越多, 为语音信号的处理提供了优质可靠的平台. 软件编程的灵活性给很多设备增加不同的功能提供了方便, 利用软件在已有的硬件平台上实现不同的功能已成为一种趋势。
本文设计了一个语音处理系统, 采用定点DSP芯片TMS320C5402作为CPU, 完成对语音信号的采集和滤波处理.1 语音采集系统的设计1. 1 系统总体设计语音采集与处理系统主要包括3个主要部分: 以TMS320C5402 为核心的数据处理模块; 以TLC320AD50为核心的语音采集与编解码( CODEC)模块; 用户根据需要扩展的存储器模块. 系统硬件结构如图1所示.1. 1. 1 CODEC模块本设计选用TLC320AD50( 以下简称AD50) 完成语音信号的A/ D转换和D/ A转换. AD50是TI公司生产的一款集成有A/ D和D/ A的音频芯片, DSP与音频AD50连接后, 可使用一个缓冲串行口来同时实现语音信号的采集和输出, 从而可以节省DSP的硬件开销. AD50使用过采样技术提供从数字信号到模拟信号和模拟信号到数字信号的高分辨率低速信号转换. 该器件包括2个串行的同步转换通道, 分别用于各自的数据传输. 语音信号直接从AD50的模拟信号输入端输入, AD50对其进行采样, 并将采样后的数据传送至DSP. DSP应用相应的算法对数据进行处理, 并将处理后的数据传送到AD50的D/ A输入端. AD50再对DSP处理后的数据进行数模转换, 变为语音信号后输出到音响设备.本系统中TLC320AD50与TMS320C5402之间采用串行通信, 通过DSP芯片的MCBSP串口实现.接口电路如图2所示.1. 1. 2 MCBSP的工作原理TMS320C5402有2个McBSP 多通道缓存串行口. McBSP提供了全双工的通信机制, 以及双缓存的发送寄存器和三缓存的接收寄存器, 允许连续的数据流传输, 数据长度可以为8、12、16、20、24、32; 同时还提供了A律和L律压扩. 数据信号经DR和DX引脚与外设通讯, 控制信号则由CLKX、CLKR、FSX、FSR等4个引脚来实现[ 4]. CPU和DMA控制器可以读取DRR[ 1, 2] 的数据实现接收, 并且可以对DXR[ 1, 2] 写入数据实现发送. 串行口控制寄存器SPCR[ 1, 2] 和引脚控制寄存器PCR用来配置串行口; 接收控制寄存器RCR[ 1, 2] 和发送控制寄存器XCR[ 1, 2]用来设置接收通道和发送通道的参数; 采样率发生器寄存器SRGR[ 1, 2] 用来设置采样率. TMS320C5402芯片串口控制寄存器功能强大, 用户通过编程不但可以设置时钟信号的极性及输入输出方向, 还可以设置同步信号的极性及输入输出方向.1. 1. 3 AD50与DSP的同步通信在应用中, 将TLC320AD50C接至DSP的同步串口, 并将TLC320AD50设置在主动工作模式下, 即由TLC320AD50 提供帧同步信号和移位时钟,TMS320C5402的管脚电压为3. 3V, 可以与AD50直接相连. 串口的移位时钟SCLK由AD发出, 串行数据在SCLK的驱动下经DIN、DOUT 移进、移出, 在SCLK的下降沿采样DIN 数据, 在SCLK下降沿送出数据到DOUT. XF控制首次或二次通信, XF为低时是AD50的首次通信, 是正常的AD、DA的数据; XF为高时是AD50的二次通信, 这时可以读写AD50的4个寄存器. 进入二次通信有软件的方法, 即把AD50设为15+1位数据模式, 最后一位标记下一个数据是否为二次通信数据, 1表示是, 0表示否.一次通信格式的16位都用来传输数据. DAC的数据长度由寄存器1的D0位决定. 启动和复位时, 默认值为15+ 1模式, 最后一位要求二次通信. 如果工作在16位传输模式下, 则必须由FC产生二次通信请求. 二次通信格式则用来初始化和修改TLC320AD50C内部寄存器的值. 在二次通信中可通过向DIN写数据来完成初始化.二次通信格式如图3所示, D13= 1表示读DIN的数据, D13= 0表示向DIN 写数据.系统复位后, 必须通过DSP 的DX接口向TLC320AD50C的DIN 写数据, 因为采用一片TLC320AD50C, 只需初始化寄存器1、寄存器2、寄存器4. 由于通信数据长度为16位, 初始化是应通过RCR1和XCR1设置McBSP的传输数据长度为16.2 语音采集语音信号的采集, 是通过话筒经模拟放大输入到AD50, AD50作相应的低频滤波并进行A/ D转化, 再通过MCBSP通道输入DSP芯片. 语音信号采集程序包括以下几个部分:( 1) DSP初始化. 对DSP的寄存器以及缓冲串口进行初始化.( 2) AD50初始化. 通过DSP的缓冲串口和XF引脚对AD50进行初始化, 再设置AD50的4个控制寄存器; 确定AD50的4个控制寄存器设置正确后,AD50才能开始采集数据. 此时, 可以用示波器检测AD50的DOUT引脚, 能发现引脚是否有连续的信号输出.( 3) 设置DSP的中断, 从缓冲串口读取数据. 如果此时在缓冲串口连续读取数据, 就可以在仿真软件CCS中查看读取的数据是否正确.( 4) DSP存放数据. 可以将缓冲串口读取的数据存放到DSP的RAM单元, 连续存放, 可通过CCS的图形显示功能判断AD50采样的数据是否正确.3 语音滤波语音去噪在语音信号上应用较多, 在实质上和普通的数字信号去噪没有什么区别, 使用滤波器和各种算法均可以实现语音信号的去噪, 使得含有噪声的信号更加清晰. 但语音信号的去噪和一般的数字信号去噪又存在着很大的差别, 因为语音信号的频谱覆盖在100Hz~3. 4kHz, 较为丰富的信号主要集中在1kHz 附近, 所以一般的滤波去噪时必须考虑语音信号的自身特征.本系统中应用的AD50内置了低通滤波器, 可以通过设置来有效滤除信号中混杂的高频干扰信号, 而对于低于100Hz的干扰信号, 则无能为力. 因此, 要用DSP进行编程设计一个软件可实现高通滤波器, 由处理器来完成信号的去噪, 采用FIR滤波.3.1 FIR滤波器的基本结构及特点有限冲激响应( FIR)滤波器的基本结构是一个分节的延时线, 把每一节的输出加权累加, 得到滤波器的输出. 数学上表示为y(n) =EN-1n=0h(n)x(n-m), (0[ n[ N- 1) (1) 对(1)式进行Z变换, 整理后可得出FIR滤波器的传递函数为H(z) = EN-1n=0h(n)z-n, (0[ n[ N- 1) (2)由( 2)式可知FIR滤波器的一般结构如图1所示.图1 FIR数字滤波器直接实现形式3.2 FIR滤波器的DSP实现原理由( 1)式可知, FIR滤波器的冲激响应为h(0), h(1), ,, h(N- 1). x(n)表示滤波器在n时刻的输入, 则n时刻的输出为y(n) = h(0)x(n) +h(1)x(n- 1) + ,+ h(N- 1)x[ n- (N- 1) ],这是一个乘、加的过程, 可以使用DSP中的MAC 指令实现该运算. 图2说明了使用循环寻址实现FIR滤波器的方法. 为了能正确使用循环寻址, 必须先初始化BK, 块长为N. 同时, 数据缓冲区和冲激响应( FIR滤波器的系数)的开始地址必须是大于N的2的最小幂的倍数. 例如, 当N= 11时, 大于N的最小2的幂为16, 则数据缓冲区的第一位地址应该是16的倍数, 因此数据缓冲区起始地址的最低4位必须是0.在图2中, 滤波系数指针初始化时指向h(N- 1), 经过一次FIR滤波计算后, 在循环寻址的作用下,仍然指向h(N- 1). 而数据缓冲区指针指向的是需要更新的数据, 如x(n). 在写入新数据并完成FIR运算后, 该指针指向x(n- (N- 1)) , 所以, 使用循环寻址可以方便地完成滤波窗口数据的自动更新.4 FIR滤波器设计实例给定FIR数字带通滤波器的技术指标为: 2个通带截止频率分别为4kHz和6kHz, 2个阻带截止频率分别为3kHz和7kHz, 采样频率均为25kHz. 输入为一个混合信号f = [ cos(2000Pt) + cos(10000Pt) + cos(20000Pt)] /6,利用Matlab设计FIR带通滤波器的系数, 将得到的滤波器系数乘以32768(即215)后舍尾取整可得DSP中滤波器系数列表. 用. word汇编命令将各滤波器系数直接输入到DSP程序中; 模拟输入数据由C语言程序实现, 然后用. copy命令将C语言程序生成的数据文件firinput拷贝到DSP程序中. DSP程序实现读入数据、滤波、显示波形等方面的任务. 完成FIR滤波器的程序框图如图3所示, 可知FIR滤波器的DSP实现主要由以下4方面的内容组成.4.1 模拟输入数据的生成用C语言程序生成输入数据, 通过. copy汇编命令将生成的数据文件拷贝到汇编程序中, 作为FIR滤波器的输入数据. C语言程序运行后所生成的数据文件名为firinpu,t 生成firinput数据文件的C语言程序如下所示:#include"stdio. h"#include"math. h"main( ){int ;idouble f[ 256];FILE*fp;if( ( fp= fopen( "e: \ \ firinput", "wt") ) = =NULL){printf( "canct openfile! \n");}for( i=0; i< =255; i++ ){f[ i] =( cos( 2* 3. 14159265* *i 1000/25000) + cos( 2* 3. 14159265* *i 5000/25000) +cos( 2* 3. 14159265* *i 10000/25000) ) /6;fprintf( fp, " . word %ld\n", ( long) ( f[ i]* 32768) );}fclose( fp);}4.2 DSP初始化程序 DSP初始化程序包括了对堆栈指针( SP)、软件等待状态寄存器( SWWSR)、中断寄存器( IFR)、中断屏蔽寄存器( IMR)以及处理器工作状态寄存器( PMST)的初始化; 另外还对各变量赋值, 具体的程序如下: . def _c_int00. mmregsswcr . set 2bht_ar2 . set 066ht_ar3 . set 067hout_wave_buf . set 0d00hdata_in . set 0f00hN . set 51fir_coef_buf . set 100hfir_data . set 200h. textrs b_c_int00_c_int00:stm#2020h, pmstssbx intmssbx sxmssbx frctstm #10h, 26hstm #10h, 36hstm #0ffh, spld #0, dpstm #0ffffh, ifrstm #20h, imrstm #02492h, swwsrstm #0, swcr可看出, FIR滤波器的系数列表将存在100h开始的单元中, 输入数据将存在200h开始的单元中, 而输出数据将存在0d00h开始的单元中.4.3 滤波系数以及输入数据的调入由于滤波器系数一开始是存在程序存储器中, 输入数据则是存在程序外的文件中, 程序对这2组数据进行处理时, 需要把两者都调到数据存储器中, 具体实现程序如下:stm #fir_data, ar6rpt #255mvpd #inpu,t*ar6+stm #fir_coef_bu,f ar6rpt #N-1mvpdfir_coe,f*ar6+stm #fir_coef_bu,f t_ar2stm #fir_data, t_ar3这段程序实现的是把输入数据调到以200h开始的单元, 而把滤波系数调到从100h开始的单元.4.4 滤波子程序一次滤波的过程实质上就是对2组数进行有规律的乘加计算, 具体程序如下:fir:mvdm #t_ar2, ar2 ; 将起始滤波系数地址100h 赋给ar2mvdm #t_ar3, ar5 ; 将起始输入数据地址200h 赋给ar5stm #data_in, ar3 ; ar3=0f00hstm #255, brc ; 定义块循环次数rptbdloop-1 ; 定义块循环结束地址stm #N, bk ; 定义循环缓冲器大小ld *ar5+, a ; 将新数据读到累加器a中 stl a,*ar3+% ; 将新数据读入栈顶rptz a, #(N-1) ; 定义循环次数, 之前先将a累加器清0mac *ar2+0%,*ar3+0%, a ; a=ar2*ar3+a, 每完成一次计算ar2、ar3 ; 指针所对应地址+1sth a, * ar6+ ; 将计算结果保存输出loop这个程序段将重复执行256次, 从而实现对于数据的读入、处理、输出等功能.5 结语本文介绍了一个实时数据采集处理系统的设计和实现, 系统以DSP芯片和TLC320AD50芯片为核心,有很强的数据处理能力和灵活的外围接口电路, 实验证明, 可较好地实现语音的滤波. 该系统可扩展为3G手机语音识别系统, 也可以作为语音信号处理算法研究和实时实现的通用平台参考文献: :[ 1] 邹彦. DSP原理及应用[ M]. 北京:电子工业出版社, 2005.[2] 乔瑞萍, 崔涛,张芳娟. TMS320C54x原理及应用[M].西安: 西安电子科技大学出版社, 2005.[3] 黄海波, 蒋伟荣. 通用语音处理系统的DSP实现[ J] . 微计算机信息, 2006,22( 5) :173- 175.[4] 张勇, 曾炽祥,周好斌. TMS320C5000系列DSP汇编语言程序设计[M]. 西安:西安电子科技大学出版社, 2004.[ 5] 卢山, 田野,郭黎利. 利用DSP技术实现FIR滤波器[ J]. 应用科技, 2002, 29( 11): 19-21.[ 6] 张伟利, 朱煜. FIR滤波器在TMS320C5402中的实现[ J].微处理机, 2005( 2): 4- 6.。
fir数字滤波器的设计与实现

FIR数字滤波器的设计与实现介绍在数字信号处理中,滤波器是一种常用的工具,用于改变信号的频率响应。
FIR (Finite Impulse Response)数字滤波器是一种非递归的滤波器,具有线性相位响应和有限脉冲响应。
本文将探讨FIR数字滤波器的设计与实现,包括滤波器的原理、设计方法和实际应用。
原理FIR数字滤波器通过对输入信号的加权平均来实现滤波效果。
其原理可以简单描述为以下步骤: 1. 输入信号经过一个延迟线组成的信号延迟器。
2. 延迟后的信号与一组权重系数进行相乘。
3. 将相乘的结果进行加和得到输出信号。
FIR滤波器的特点是通过改变权重系数来改变滤波器的频率响应。
不同的权重系数可以实现低通滤波、高通滤波、带通滤波等不同的滤波效果。
设计方法FIR滤波器的设计主要有以下几种方法:窗函数法窗函数法是一种常用简单而直观的设计方法。
该方法通过选择一个窗函数,并将其与理想滤波器的频率响应进行卷积,得到FIR滤波器的频率响应。
常用的窗函数包括矩形窗、汉宁窗、哈密顿窗等。
不同的窗函数具有不同的特性,在设计滤波器时需要根据要求来选择合适的窗函数。
频率抽样法频率抽样法是一种基于频率抽样定理的设计方法。
该方法首先将所需的频率响应通过插值得到一个连续的函数,然后对该函数进行逆傅里叶变换,得到离散的权重系数。
频率抽样法的优点是可以设计出具有较小幅频纹波的滤波器,但需要进行频率上和频率下的补偿处理。
最优化方法最优化方法是一种基于优化理论的设计方法。
该方法通过优化某个性能指标来得到最优的滤波器权重系数。
常用的最优化方法包括Least Mean Square(LMS)法、Least Square(LS)法、Parks-McClellan法等。
这些方法可以根据设计要求,如通带波纹、阻带衰减等来得到最优的滤波器设计。
实现与应用FIR数字滤波器的实现可以通过硬件和软件两种方式。
硬件实现在硬件实现中,可以利用专门的FPGA(Field-Programmable Gate Array)等数字集成电路来实现FIR滤波器。
基于DSP的在线FIR数字滤波器设计及实现

统 。从 滤 波器 的技 术 指 标 出 发 , 用 MAT A 运 L B软 件 设计 FR滤 波器 的参 数 , 用 汇编 语 言 编 写 D P处 理 器 的 F R数字 滤 波 I 使 S I 器 程 序 和 A / A 转 换 器 接 口程 序 , DD 实现 了一 个 在 线 F R数 字 滤 波 器 。通 过 了软 件 仿 真 和 硬 件 在线 调试 , 出 了实 验 波 形 。 I 给 关 键 词 : 字 滤 波 器 ;D P 设 计 ;实 现 数 S;
b一 0 4* sn ( . . i c 0 4* ( 1 1 ) ; 一 0: 0 )
重 要 的 是 , I 滤 波 器 在 满 足 幅 频 响 应 要 求 的 同 时 , 以 FR 可 获 得 严 格 的 线 性 相 位 特 性 。 因 此 , 在 高 保 真 的 信 号 处 它 理 , 数 字音频 、 如 图像 处 理 、 据 传 输 以 及 生 物 医 学 等 领 域 数
O 引 言
数 字 滤 波 器 是 数 字 信 号 处 理 的 基 础 , 来 对 信 号 进 行 用 过 滤 、 测 与 参 数 估 计 等 处 理 。数 字 滤 波 器 分 为 有 限 冲 激 检 响 应 ( I 和 无 限 冲 激 响 应 (I 滤 波 器 两 大 类 。 与 IR F R) IR) I
S a t g fo t e f t r s e iia i n ,FI fle a a t r r o y M ATLAB s f wa e s e b y l n u g s a s t r i r m h i e p cfc to s n l R i r p r me e s a e g t b t o t r ,a s m l a g a e i lo
基于DSP的FIR数字滤波器设计研究
的数 字 信号 用 D A 进 行转 化 ,形成 模 拟 的采 样值 , / 塌: 将 得 到 的 不 平 滑 的 滤 波通 过 滤 波器 等设 备进 后 行处 理 ,从 而得 到最 终 的模拟 连续 的信 号 。 因 为 DS P信 号 处理 系统 是 以数 字 信 号处 理 理 论为 基 础 ,故 兼 具 有数 字 信 号 的特 点 。其 特点 一 , 与之 相 兼 容 的接 口比较 多 ,都 是 以数 字 为基 础 的 , 便 与其 他 的 系 统 接 口进 行 连 接 ;其 特 点 二 , 因
摘
要:D P S 芯片 是一种微 处理器 ,能够进行将 信息进 行数字化 的处理 ,用 于对付各 种实时的数字信 号处理 ,卷积 、变 化等 ,处 理效率 高 ,因而被 广泛地应 用在许多 的方 面 ,尤其 在数字滤波器 上。针 对这个情况 ,本文采 用了某公 司的T 30 5 X MS 2C 4 芯片作 为本文研究 的D P S 芯片 ,根据 提出 的算法 实现 了FR I滤波 器 ,并 经过仿 真实验 ,得 到的 实验 结果满 足滤 波的条件 ,预计 的 实验结果 验证 了本 文提出的算 法。
、 l 似 I I 泣 3
基于D P I 娄 字滤波器设计研究 S 的FR
The R gi al i erdesi FI di t l ft gn bas ed he on t DSP
王
坤
w ANG n Ku
( 河南职业技术学 院 ,郑州 4 0 4 ) 5 0 6
关键词 : D P;T 3 0 4 芯 片;FR S MS 2 C5X 滤波器 J 中图分 类号 :T 1 N7 3 文献标识码 :A 文章编号 :1 0 - 14 2 i )8 上 ) l 7 3 9 0 ( o 0 ( 一O4 -0 0 3 2
基于DSP实现的FIR低通滤波器

基于DSP实现的FIR低通滤波器FIR(Finite Impulse Response)低通滤波器是一种数字信号处理(DSP)算法,用于滤除输入信号中高于一些截止频率的频域成分,并使输出信号只包含低于该截止频率的成分。
FIR低通滤波器通常由一组脉冲响应函数(Impulse Response)的加权和组成,其中权重决定了滤波器的频率响应。
实现FIR低通滤波器的一种常见方法是使用离散时间线性卷积运算。
滤波器的输入信号通过一个延迟线数组,然后与一组权重向量进行内积。
该内积计算的结果即为滤波器的输出。
在DSP领域,用于实现FIR低通滤波器的算法有很多种,其中最常用的是基于迭代结构(Direct Form)的算法。
此算法按照滤波器的脉冲响应函数的长度进行迭代,每次迭代处理输入信号的一个样本。
该算法的优点是实现简单、稳定可靠。
下面是一个基于DSP实现的FIR低通滤波器的伪代码示例:```python#定义滤波器的截止频率和脉冲响应函数长度def cutoff_frequency = 1000 # 截止频率为1kHzdef length = 101 # 脉冲响应函数长度为101#初始化滤波器的权重向量def weights = [0.0] * length#计算滤波器的脉冲响应函数for i in range(length):#计算当前权重对应的频率frequency = i * sampling_rate / length#如果当前频率小于截止频率,则设置权重为1,否则为0weights[i] = 1 if frequency <= cutoff_frequency else 0#初始化输入和输出信号数组def input_signal = [0.0] * signal_lengthdef output_signal = [0.0] * signal_length#循环处理输入信号的每个样本for i in range(signal_length):#延迟线数组移位,并将当前输入样本放入延迟线的第一个位置delay_line[1:] = delay_line[:-1]delay_line[0] = input_signal[i]#计算滤波器的输出output_signal[i] = sum(delay_line * weights)```这段示例代码实现了一个FIR低通滤波器,截止频率为1kHz,脉冲响应函数长度为101、首先,根据截止频率计算出权重向量。
FIR滤波器在DSP上的实现
FIR滤波器在DSP上的实现
1引言
近年来,随着数字信号处理(DSP)技术的发展,自由响应滤波器(FIR)已成为DSP系统的核心部分,广泛用于各种应用,如声学信号处理、通信器件、生物医学信号处理等。
本文首先介绍FIR滤波器的基本原理,之后介绍如何在DSP上实现FIR滤波器,主要介绍两种实现方法:延迟求和和移位加法(Shift-Add)。
最后,将对比分析两种实现方法的优劣,并分析哪些条件下使用移位加法。
2FIR滤波器的原理
输入的时域信号x[n]经过一系列不同阶数的延迟单元滤波器系数h[n]的乘法和求和运算,从而得到输出的时域信号y[n],即
y[n]=\sum_{k=0}^{k=N}h_{k}x[n-k]
其中,x[n]表示输入时域信号,h[n]表示滤波器系数,y[n]表示输出时域信号,N表示滤波器的阶数。
3在DSP上实现FIR滤波器。
基于DSP的FIR数字滤波器设计及实现
() 2
可以看出 。 数字滤 波 器 的功能 就是 把输 入 序列 通过 一定 的 运算 变换成输 出序列 … 。 数字滤波器依据 冲激 响应 的宽 度划 分为有 限长单 位 冲 激响应 ( I 滤波 器 和无 限长单 位 冲激 响应 (I 滤波 器 。 FR) I R) 从结构类型来看 , 在系 统传 递 函数 表现 为 : 果 全部 = 如
第5 卷第 4期 21 0 0年 1 2月
江 西 蓝 天 学 院 学 报
J URNAL OF JANG L E S Y O I XIB U K UNI RST VE I Y
Vo 1 No 4 5. .
De e e . 0 0 c mb b 2 1
基 于 D P的 FR数 字 滤 波 器 设 计 及 实现 S I
盯
,
,
着信 息时代和数字 世界 的 到来 , 字信 号处 理 已成 为 当今 数
一
日( )=— z
乏
~
() 1
门极其 重要的学科和技术 领域 , 它在 通信 、 语音 、 图像 、 自
1一
口 z“ ^
动控 制、 雷达 、 军事 、 空航天 、 航 医疗 和家用 电器 等众 多领域 直接 由此 式可得出表示输入输 出关 系的常 系数线性 差分 方 得 到了广泛的应 用 。而在 数字 信号 处 理应用 中, 字滤 波 程为 : 数
中图分类号:P1 T31
文献标识码: A
文章鳊号: 3 21 )4 08 0 1 (00 0 — 2 — 4 2
在一个实 际的应 用 系统 中 , 由于 设备 本 身和 外界 环境 1 FR滤 波器 的 M T A I A L B设计 的原 因 , 总存在各种干扰 , 号 中掺杂 了噪声 。譬 如音 频 使信
FIR数字滤波器设计与软件实现
实验四:FIR数字滤波器设计与软件实现1.实验目的(1)掌握用窗函数法设计FIR数字滤波器的原理和方法。
(2)学会调用MA TLAB函数设计FIR滤波器。
(3)通过观察频谱的相位特性曲线,建立线性相位概念。
(4)掌握FIR数字滤波器的MATLAB软件实现方法。
2.实验原理设计FIR数字滤波器一般采用直接法,如窗函数法和频率采样法。
本实验采用窗函数法设计FIR滤波器,要求能根据滤波需求确定滤波器指标参数,并按设计原理编程设计符合要求的FIR数字滤波器。
本实验软件实现是调用MATLAB提供的fftfilt函数对给定输入信号x(n)进行滤波,得到滤波后的输出信号y(n)。
3. 实验内容及步骤(1) FIR数字滤波器设计根据窗函数法设计FIR数字滤波器的原理和步骤,设计一个线性数字低通滤波器,要求通带临界频率fp=120Hz,阻带临界频率fs=150Hz,通带内的最大衰减Ap=0.1dB,阻带内的最小衰减As=60db,采样频率Fs=1000Hz。
观察设计的滤波器频率特性曲线,建立线性相位概念。
(2) FIR数字滤波器软件实现利用第(1)步设计的数字滤波器,调用fftfilt函数对信号进行滤波,观察滤波前后的信号波形变化。
4.思考题(1)简述窗函数法设计FIR数字滤波器的设计步骤。
(2)简述信号在传输过程中失真的可能原因。
5.实验报告要求(1)结合实验内容打印程序清单和信号波形。
(2)对实验结果进行简单分析和解释。
(3)简要回答思考题。
常用窗函数技术参数及性能比较一览表窗类型最小阻带衰减主瓣宽度精确过渡带宽窗函数矩形窗21dB 4π/M 1.8π/M boxcar三角窗25dB 8π/M 6.1π/M bartlett汉宁窗44dB 8π/M 6.2π/M hanning哈明窗53dB 8π/M 6.6π/M hamming 布莱克曼窗74dB 12π/M 11π/M blackman 取凯塞窗时用kaiserord函数来得到长度M和βkaiser附录:(1)FIR数字滤波器设计clear;clc;close all;format compactfp=120, Ap=0.1, fs=150, As=60 ,Fs=1000,wp=2*pi*fp/Fs,ws=2*pi*fs/Fs ,Bt=ws-wp; M=ceil(11*pi/Bt);if mod(M,2)==0; N=M+1, else N=M, end;wc=(wp+ws)/2,n=0:N-1;r=(N-1)/2;hdn=sin(wc*((n-r)+eps))./(pi*((n-r)+eps));win=blackman(N); hn=hdn.*win',figure(1);freqz(hn,1,512,Fs);grid on;图(一)FIR数字滤波器(2)FIR数字滤波器软件实现n=[0:190];xn=sin((2*pi*120/1000)*n)+sin((2*pi*150/1000)*n);yn=fftfilt(hn,xn);figure(2)subplot(2,1,1);plot(xn);title('滤波前信号') ;subplot(2,1,2);plot(yn);title('滤波后信号');图(2)FIR数字滤波器软件实现思考题:(1) 用升余弦窗设计一线性相位低通FIR数字滤波器,并读入窗口长度。
基于DSP的FIR数字滤波器的研究与实现
Ab ta t sr c Ths i pa per nr du es ito c FI di tl ier bo t ie ph e, a c dig o ier ec nial pe f a i wid R gi fl a u l ar a t n as c or n t fl t h c s cic t t i on. n ow f n t u ci on
数 字 滤 波 器 分 为 无 限 冲 激 响 应 滤 波 器 ( R) 有 限 冲激 响 t 和 l 应 滤 波 ( I ) FR滤 波 器 具 有 不 含 反 馈 环 路 、 构 简 单 以 及 可 FR , I 结 以 实 现 的严 格 线性 相 位 等 优 点 ,因 而在 对 相 位 要 求 比较严 格 的 条件 下 , 用 FR 数字 滤波 器 。在 许 多 场 合下 , 要 对 信 号进 行 采 I 需 实 时处 理 ,而 D P控 制 器 采 用 多 组 总线 结 构 实 现 并 行 处 理 , S 独 立 的 累加 器 和乘 法 器 以及 丰 富 的 寻址 方式 , 此 采 用 D P控 制 因 S
, 有
如 果 FR滤 波 器 的 单 位抽 样 响 应 h n 为 实 数 , 满 足 h n I () 且 () = h N一 一 )其 对 称 中 心 在 n ( 1/ ± ( 1n , - N一 )2处 , 滤 波 器 具 有 准 则 确 的线 性 相 位 。 h n 窗 函数 设 计 法 的设 计 思 路 : 般 是 先 给 定 所 要 求 的理 () 一
me h d s ad t o i optd. ef en f I di t ft r s e Co fi ci to FR gi al ie i l de i e tr ugh sgn d h o MATL AB. pu sgna i i t i l s oc s e by ea t e ab e n pr e s d r l i ov m te s sem f h yt o DSP 丁MS32 VC5 e pe i 0 41 x rmena r ut ndiats R gi l ierpr ii i i , od sabiy,i l lxi e, 6, t l es l i c e FI di t ft ecson s ghgo t l hghy f bl a l h i 字滤 波 器 的研 究 与 实 现 S I
FIR滤波器设计与实现实验报告
FIR滤波器设计与实现实验报告目录一、实验概述 (2)1. 实验目的 (3)2. 实验原理 (3)3. 实验设备与工具 (4)4. 实验内容与步骤 (6)5. 实验数据与结果分析 (7)二、FIR滤波器设计 (8)1. 滤波器设计基本概念 (9)2. 系数求解方法 (10)频谱采样法 (11)最小均方误差法 (14)3. 常用FIR滤波器类型 (15)线性相位FIR滤波器 (16)非线性相位FIR滤波器 (18)4. 设计实例与比较 (19)三、FIR滤波器实现 (20)1. 硬件实现基础 (21)2. 软件实现方法 (22)3. 实现过程中的关键问题与解决方案 (23)4. 滤波器性能评估指标 (25)四、实验结果与分析 (26)1. 实验数据记录与处理 (27)2. 滤波器性能测试与分析 (29)通带波动 (30)虚部衰减 (31)相位失真 (32)3. 与其他设计方案的对比与讨论 (33)五、总结与展望 (34)1. 实验成果总结 (35)2. 存在问题与不足 (36)3. 未来发展方向与改进措施 (37)一、实验概述本次实验的主要目标是设计并实现一个有限脉冲响应(Finite Impulse Response,简称FIR)滤波器。
FIR滤波器是数字信号处理中常用的一种滤波器,具有线性相位响应和易于设计的优点。
本次实验旨在通过实践加深我们对FIR滤波器设计和实现过程的理解,提升我们的实践能力和问题解决能力。
在实验过程中,我们将首先理解FIR滤波器的基本原理和特性,包括其工作原理、设计方法和性能指标。
我们将选择合适的实验工具和环境,例如MATLAB或Python等编程环境,进行FIR滤波器的设计。
我们还将关注滤波器的实现过程,包括代码编写、性能测试和结果分析等步骤。
通过这次实验,我们期望能够深入理解FIR滤波器的设计和实现过程,并能够将理论知识应用到实践中,提高我们的工程实践能力。
本次实验报告将按照“设计原理设计方法实现过程实验结果与分析”的逻辑结构进行组织,让读者能够清晰地了解我们实验的全过程,以及我们从中获得的收获和启示。
基于DSP的FIR数字滤波器的设计

摘要 :利用 T M S 3 2 0 C 5 4 x系统开发环境 C C S下, 实现基 于 D S P的 F I R数 字滤波器并进行 实验仿真 , 并从输入信号和输 出信号的
时域和频域 曲线上 , 观 察在 D S P 上 实现的 F I R滤 波器的特性, 从仿真结果上可以看 出, 该滤波器具有很好 的滤波特性。
t h e i n p u t s i g n a l a n d t h e o u t p u t s i g n a 1 . T h e s i mu l a t i o n r e s u l t s s h o we d t h a t t h i s i f l t e r h a d g o o d i f l t e in r g p op r e r t i e s .
O 引 言
波器 , F I R滤波器 在保 证幅度特 性 满足技术 要求 的 同时 , 随着信息 处理技术 的飞速发展 , 熟 悉信号 处理 技术逐 很容易做 到严格 的线性相位特性。 为 了使滤波器满足线性
渐发展 成为一 门主流 技术 , 它在 电子信 息、 通信 、 软 件无线 相 位 条 件 , 要求其单位脉 冲响应 为实序列 , 且 满 足 偶 对 称 电、 自动控制 、 仪表技 术、 信 息家 电等高科 技领域得到 了越 或奇 对称条 件 即 h ( n ) = h ( N 一 1 一 n ) 或者 h ( n ) : 一 h ( N一 1 一 n ) 。这 来 越 广 泛 的 应 用 ,其 中 滤 波 器 技 术 的 实 现 也 越 来 越 重要 。 样, 当 N为偶数 时 , 偶 对称线性相位 F I R滤 波器 的差 分方 那 么相对于 模拟滤波器 , 数 字滤 波器没 有漂移 , 能够 处理 程 表 达 式 为 : 低频信号 ,频率响应特性可做成非常接近于理 想的特性 ,
fir数字滤波器的设计与实现
fir数字滤波器的设计与实现一、引言数字滤波器是数字信号处理中的重要组成部分,它可以用于去除信号中的噪声,平滑信号等。
其中,fir数字滤波器是一种常见的数字滤波器。
本文将介绍fir数字滤波器的设计与实现。
二、fir数字滤波器概述fir数字滤波器是一种线性相位、有限脉冲响应(FIR)的数字滤波器。
它通过一系列加权系数对输入信号进行卷积运算,从而实现对信号的过滤。
fir数字滤波器具有以下特点:1. 稳定性好:由于其有限脉冲响应特性,使得其稳定性优于IIR(无限脉冲响应)数字滤波器。
2. 线性相位:fir数字滤波器在频域上具有线性相位特性,因此可以保持输入信号中各频率分量之间的相对时延不变。
3. 设计灵活:fir数字滤波器可以通过改变加权系数来实现不同的频率响应和截止频率。
三、fir数字滤波器设计步骤1. 确定需求:首先需要确定所需的频率响应和截止频率等参数。
2. 选择窗函数:根据需求选择合适的窗函数,常用的有矩形窗、汉明窗、布莱克曼窗等。
3. 计算滤波器系数:利用所选窗函数计算出fir数字滤波器的加权系数。
常见的计算方法有频率采样法、最小二乘法等。
4. 实现滤波器:将计算得到的加权系数应用于fir数字滤波器中,实现对信号的过滤。
四、fir数字滤波器实现方法1. 直接形式:直接将计算得到的加权系数应用于fir数字滤波器中,实现对信号的过滤。
该方法简单易懂,但是需要大量运算,不适合处理较长的信号序列。
2. 快速卷积形式:利用快速傅里叶变换(FFT)来加速卷积运算。
该方法可以大大减少计算量,适合处理较长的信号序列。
五、fir数字滤波器应用案例1. 语音处理:fir数字滤波器可以用于去除语音信号中的噪声和杂音,提高语音质量。
2. 图像处理:fir数字滤波器可以用于图像去噪和平滑处理,提高图像质量。
3. 生物医学信号处理:fir数字滤波器可以用于生物医学信号的滤波和特征提取,如心电信号、脑电信号等。
六、总结fir数字滤波器是一种常见的数字滤波器,具有稳定性好、线性相位和设计灵活等优点。
dsp实验报告-有限脉冲响应滤波器(FIR)实验
实验四.数字信号处理算法实验实验4.1 :有限脉冲响应滤波器(FIR )算法实验一.实验目的1.掌握窗函数法设计FIR 滤波器的Matlab 实现,为CCS 提供滤波系数。
2.掌握采用C 语言在VC5509开发板上实现混频信号的FIR 滤波。
二.实验设备计算机,ICETEK-VC5509-A 实验箱及电源。
三.实验原理1. 窗函数法设计FIR 滤波器(详细理论请看《数字信号处理》原理书籍) 本实验要求:设计一个低通滤波器,通带截止频率fp=10kHz ,阻带截止频率fs1=22kHz ,阻带衰减ap=75dB ,采样频率fs=50kHz,计算出滤波系数fHn,并对混频信号(高频+低频正弦波)fIn 进行滤波,得输出波形fOut 。
解:过渡带宽度=fs1-fp=12kHz ;截止频率:f1=fp+(过渡带宽度)/2=16kHz f1对应的数字频率:Ω1=2πf1/fs=0.64π(rad) -理想低通滤波器单位脉冲响应:hd[n]=sin(0.64π(n-a))/(π(n-a)) 其中a=(N-1)/2 (n=0~N-1)-根据阻带衰减要求选择布莱克曼窗,窗函数长度N 为: N=5.98fs/过渡带宽度≈25则窗函数为:w[n]=0.42-0.5cos(2πn/24)+0.08cos(4πn/24) 滤波器脉冲响应为:h[n]=hd[n]w[n] (n=0~N-1) <1>-根据上面各式计算出h[n]。
2. FIR 滤波FIR 滤波器的差分方程为:1()()N i i y n h x n i -==-∑ <2>其中,h i ----滤波器系数;x(n)---滤波器的输入;y(n)--- 滤波输出。
根据公式<1><2>,得本例对应FIR 滤波器的差分方程为: y[n]=-0.001x[n-2]-0.002x[n-3]-0.002x[n-4]+0.01x[n-5]-0.009x[n-6]-0.018x[n-7]-0.049x[n-8]-0.02x[n-9] +0.11x[n-10]+0.28x[n-11]+0.64x[n-12] +0.28x[n-13]-0.11x[n-14]-0.02x[n-15]+0.049x[n-16]-0.018x[n-17]-0.009x[n-18]+0.01x[n-19] -0.002x[n-20]-0.002x[n-21]+0.001x[n-22] (n=0,1,2,...)采用线性缓冲区法(原理见备课笔记)解此差分方程,得FIR 滤波结果y(n)。
fir、iir数字滤波器的设计与实现

一、概述数字滤波器是数字信号处理中的重要部分,它可以对数字信号进行滤波、去噪、平滑等处理,广泛应用于通信、音频处理、图像处理等领域。
在数字滤波器中,fir和iir是两种常见的结构,它们各自具有不同的特点和适用场景。
本文将围绕fir和iir数字滤波器的设计与实现展开讨论,介绍它们的原理、设计方法和实际应用。
二、fir数字滤波器的设计与实现1. fir数字滤波器的原理fir数字滤波器是一种有限冲激响应滤波器,它的输出仅依赖于输入信号的有限个先前值。
fir数字滤波器的传递函数可以表示为:H(z) = b0 + b1 * z^(-1) + b2 * z^(-2) + ... + bn * z^(-n)其中,b0、b1、...、bn为滤波器的系数,n为滤波器的阶数。
fir数字滤波器的特点是稳定性好、易于设计、相位线性等。
2. fir数字滤波器的设计方法fir数字滤波器的设计通常采用频率采样法、窗函数法、最小均方误差法等。
其中,频率采样法是一种常用的设计方法,它可以通过指定频率响应的要求来确定fir数字滤波器的系数,然后利用离散傅立叶变换将频率响应转换为时域的脉冲响应。
3. fir数字滤波器的实现fir数字滤波器的实现通常采用直接型、级联型、并行型等结构。
其中,直接型fir数字滤波器是最简单的实现方式,它直接利用fir数字滤波器的时域脉冲响应进行卷积计算。
另外,还可以利用快速傅立叶变换等算法加速fir数字滤波器的实现。
三、iir数字滤波器的设计与实现1. iir数字滤波器的原理iir数字滤波器是一种无限冲激响应滤波器,它的输出不仅依赖于输入信号的有限个先前值,还依赖于输出信号的先前值。
iir数字滤波器的传递函数可以表示为:H(z) = (b0 + b1 * z^(-1) + b2 * z^(-2) + ... + bn * z^(-n)) / (1 +a1 * z^(-1) + a2 * z^(-2) + ... + am * z^(-m))其中,b0、b1、...、bn为前向系数,a1、a2、...、am为反馈系数,n为前向路径的阶数,m为反馈路径的阶数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
h ( 0) = h ( 36) = - 32
h ( 1) = h ( 35) = - 117
h ( 2) = h ( 34) = 0
h ( 3) = h ( 33) = 212
h ( 4) = h ( 32) = 104
h ( 5) = h ( 31) = - 288
h ( 6) = h ( 30) = - 304
h ( 18) = 0. 4375
图 2 滤波系数
由于 TM S320C54x是 16位定点处理器 ,在进行汇 编程序设计时 , F IR滤波器系数需要采用 Q15格式 ,即 必须将上述系数转化为 Q15 定点格式 。这只要将滤 波器各系数分别乘以 215即可 [ 3 ] ,结果如图 3所示 。
macd ( 3 AR0 - , F IR _coefficient, A ) ; 这里实现公
N-1
式 y ( n) = Σ h ( k) x ( n - k)所代表的卷积功能 k =0 @OUTPUT = hi (A ) 0
A = @OUTPUT 0
A = #0FFFEh&A 3 AR3 + =A 3 AR5 =A TC = bitf ( @ host_cmd, 01h) If ( TC) goto D IS_ INPUT
h ( 12) = h ( 24) = 0. 0417
h ( 13) = h ( 23) = 0. 0316
h ( 14) = h ( 22) = - 0. 0524
h ( 15) = h ( 21) = - 0. 0848
h ( 16) = h ( 20) = 0. 0598
h ( 17) = h ( 19) = 0. 3208
h ( 6) = h ( 30) = - 0. 0093
h ( 7) = h ( 29) = 0. 0090
h ( 8) = h ( 28) = 0. 0184
h ( 9) = h ( 27) = - 0. 0047
h ( 10) = h ( 26) = - 0. 0279
h ( 11) = h ( 25) = - 0. 0071
2006年 7月 25日第 23卷第 4期
文章编号 : 100923664 (2006) 0420038203
通信电源技术 Telecom Power Technologies
Jul. 25, 2006, Vol. 23 No. 4
设计应用
基于 D SP的 F IR数字滤波器的设计与实现
王献峰 ,石 东 (天津科技大学电子信息与自动化学院 ,天津 300222)
F IR 滤波器的设计 ,可以采用 MATLAB 的数字信 号处理软件包所提供的专用函数方便地来设计 ,直接 求取 F IR 滤波器系数 [ 1 ] 。在 MATLAB 中 ,采用 Kaiser 窗函数设计低通 F IR 滤波器 。针对上述的设计要求 , 采用上面介绍的 Kaiser窗函数法进行设计 ,代入相应 的参数 ,求得 F IR 滤波器阶数 N = 37,其各系数如图 2 所示 。
k =0
收稿日期 : 2006203210 作者简介 : 王献峰 ( 1980 - ) ,男 ,山东人 ,硕士研究生 ,研究方 向 :智能化自动化装置的研究 。
·38·
式 ( 1)就是 F IR 滤波器的差分方程 。 F IR 滤波器
的最主要的特点是没有反馈回路 ,因此它是无条件稳
定系统 。它的单位脉冲响应 h ( n)是一个有限长序列 。
B = @ buffer_len
B =B - #1
@ buffer_len =B TC = bitf ( @ buffer_len, 0FFh) If ( TC) goto NEXT1
NEXT1: AR2 = #buffer
AR3 = #buffer1
@ buffer_len = #0FFh 2. 2 多通道带缓冲串行口 M cBSP
1 F IR滤波器的基本结构及设计方法
1. 1 F IR滤波器的基本结构
设 h ( n) ( n = 0, 1, 2 …N - 1 ) 为滤波器的冲激响
应 ,输入信号为 x ( n) ,则 F IR 滤波器就是要实现下列
差分方程 :
N-1
y ( n) = Σ h ( k) x ( n - k)
(1)
为了实现低功耗 、高性能而专门设计的定点 DSP 芯 片 ,主要应用于通信系统方面 。其指令执行速率高达 100M IPS,该芯片内部是哈佛结构 ,数据空间和程序空 间是相对独立的 。本文中 F IR 滤波器设计采用 TI公 司的基于 TM S320C5402的 DSK开发板 。
程序中 F IR滤波器的实现主要是以下语句 : @ Samp le_ Input =A VAR IABLE Samp le_ Input1 A = #0 repeat ( #36)
摘要 : F IR数字滤波器广泛地应用于数字信号处理领域 ,本文对 F IR 滤波器的工件原理和设计方法进行了简单的介
绍 。文中采用窗函数法设计 F IR数字滤波器 ,给出了 TM S320VC5402的编程语句及其仿真波形 。
关键词 : F IR数字滤波器 ; DSP;窗函数法 ; TM S320C5402
h ( 14) = h ( 22) = - 1717
h ( 15) = h ( 21) = - 2778
h ( 16) = h ( 20) = 1959
h ( 17) = h ( 19) = 10184
h ( 18) = 14336
图 3 转化后滤波系数
2 F IR滤波器的 D SP实现
2. 1 TM S320C5402 编程 TM S320C5402是 TI公司 20 世纪 90 年代中后期
Science and Technology, Tianjin 300222, China)
Abstract: The digital filter is w idely used in the digital singnal p rocessing field. This paper introduced the working p rincip le of F IR filter and the design method briefly. W indow function is used to design F IR based on TM S320C5402 DSP function.
理想的低通滤波器的频率响应 Hd (w )是一个矩 形 ,这意味着它在时域上是无限长的序列 ,这在实际上 是不可能实现的 。因此要采取某种方法截断 Hd ( n) , 可以用一个有限长度的窗函数序列 w ( n )与之相乘 。 这个窗函数序列的形状和长度都会对最后系统的频率 响应特性产生影响 ,因此对窗函数的分析和选择是设 计 F IR滤波器的关键问题所在 。
由上面的方程可见 , F IR 滤波算法实际上是一种乘法
累加运算 ,它不断地输入样本 x ( n) ,经延时 ( z∃ 1 ) ,做
乘法累加 ,再输出滤波结果 y ( n) [ 1, 2, 3 ] 。
对式 ( 1 )进行 Z变换 ,整理后可得 F IR 滤波器的
传递函数为 :
N-1
H ( z) = Σ h ( k) z2k
Key words: F IR digital filter; DSP; w indow function method; TM S320C5402
0 引 言
数字信号处理 (D igital Signal Processing2DSP)是把 数字或符号表示的序列 ,通过计算机设备 ,用数字的方 式去处理 ,以达到更符合人们要求的信号形式 。在很 多数字信号的处理过程中 ,如对信号的过滤 、检测 、预 测等都要广泛地用到滤波器 。数字滤波器是数字信号 处理的基本方法 。数字滤波与模拟滤波相比有很多优 点 ,它除了可避免模拟滤波器固有的电压漂移 、温度漂 移和噪声等问题外 ,还能满足滤波器对幅度和相位的 严格要求 。低通有限冲激响应滤波器 ( Finite Impulse Response Filter, F IR 滤波器 ) 有其独 特的 优点 , 因 为 F IR系统只有零点 ,系统总是稳定的 ,且为线性相位 , 允许实现多通道滤波器 。数字滤波器是 DSP的最基 本的应用领域 ,一个 DSP芯片执行数字滤波的能力反 映了这种芯片功能的大小 。数字滤波器因其设计灵 活 、实现方便等特点被广泛应用 [ 1, 2 ] 。