单点定位程序说明
绝对单点定位的计算流程
绝对单点定位的计算流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!绝对单点定位的计算流程一、准备工作阶段。
在进行绝对单点定位计算之前,需做好充分准备。
RTKLIB源码解析(一)——单点定位(pntpos.c)

RTKLIB源码解析(⼀)——单点定位(pntpos.c)RTKLIB源码解析(⼀)——单点定位(pntpos.c)标签: GNSS RTKLIB 单点定位前段时间⼀直忙着写毕业论⽂,所以也没有太多时间来阅读 RTKLIB源码,最近好⽍把 pntpos中的相关代码看了⼀遍,知道了 RTKLIB是如何实现单点伪距定位的。
这⾥把每⼀个函数都做成了⼩卡⽚的形式,每个函数⼤都包含函数签名、所在⽂件、功能说明、参数说明、处理过程、注意事项和我的疑惑这⼏个部分,介绍了阅读代码时我⾃⼰的看法和疑惑。
所以希望诸位看官能帮忙解答我的疑惑,与我交流,也希望能帮助后来也有需要阅读 RTKLIB源码的⼈,给他们多提供⼀份思路。
总⽽⾔之,既为⼈,也为⼰。
这份⽂档是使⽤ Cmd Markdown完成的,在作业部落上其格式显式的⾮常完整,但是在博客园中⽬录、代码块和流程图似乎都没有显⽰出来,所以这⾥也贴上本⽂在作业部落上的链接,对格式“零容忍”的同学请移步那⾥。
⽬录pntposint pntpos (const obsd_t *obs, int n, const nav_t *nav, const prcopt_t *opt, sol_t *sol,double *azel, ssat_t *ssat, char *msg)所在⽂件:pntpos.c功能说明:依靠多普勒频移测量值和伪距来进⾏单点定位,给出接收机的位置、速度和钟差参数说明:函数参数,8个:obsd_t *obs I observation dataint n I number of observation datanav_t *nav I navigation dataprcopt_t *opt I processing optionssol_t *sol IO solutiondouble *azel IO azimuth/elevation angle (rad) (NULL: no output)ssat_t *ssat IO satellite status (NULL: no output)char *msg O error message for error exit返回类型:int O (1:ok,0:error)调⽤关系:如⽆特别说明,本⽂所出现的流程图中,纵向代表时间上的先后调⽤顺序,横向代表层次上的逐级调⽤顺序。
rtklib单点定位处理流程

RTKLIB单点定位处理流程RTKLIB(Real-Time Kinematic Library)是一个开源的软件包,用于进行实时差分定位和精密定位处理。
本文将详细描述RTKLIB的单点定位处理流程,包括数据预处理、观测数据解析、导航文件生成、单点定位计算等步骤。
1. 数据预处理在进行单点定位之前,首先需要对原始观测数据进行预处理。
这些原始数据通常来自于全球导航卫星系统(GNSS)接收机,包括GPS、GLONASS、Galileo等卫星系统。
1.1 数据格式转换首先,将原始观测数据转换为RTKLIB可识别的格式。
常见的格式包括RINEX (Receiver Independent Exchange Format)和UBX(u-blox binary format)。
使用RTKCONV工具可以将不同格式的观测数据转换为RINEX格式。
1.2 数据筛选对于长时间的连续观测数据,可以根据需要选择特定时间段的数据进行处理。
使用RTKPLOT工具可以可视化显示观测数据,并通过滑动窗口选择感兴趣的时间段。
2. 观测数据解析在完成数据预处理后,接下来需要对RINEX文件进行解析,提取其中的卫星观测量和导航电文。
2.1 卫星观测量解析使用RTKCONV工具将RINEX文件转换为OBS格式,其中包含了卫星的伪距观测值和载波相位观测值。
这些观测值是进行定位计算的基础。
2.2 导航电文解析使用RTKCONV工具将RINEX文件转换为NAV格式,其中包含了卫星的导航电文。
导航电文中包含了卫星的轨道参数和钟差等信息,用于计算卫星位置和钟差。
3. 导航文件生成在完成观测数据解析后,需要生成导航文件,用于计算卫星位置和钟差。
3.1 历书平滑由于导航电文中的轨道参数是以时间为自变量的多项式函数表示的,需要对其进行历书平滑处理。
使用RTKNAVIG工具可以对导航电文进行历书平滑,并生成历书平滑后的导航文件。
3.2 导航文件格式转换使用RTKCONV工具将历书平滑后的导航文件转换为SP3(Standard Product 3)格式或CLK(Clock)格式。
第6章 单点定位

• 单位权中误差,其受伪距测量精度、星历精度及大气延迟 影响;
• 对应的协因数矩阵,它由卫星的空间几何分布决定
6.1 伪距单点定位
协因数矩阵中各个元素反映了在特定的卫星空间几何分布 下,不同参数的定位精度及其相关性信息。因此,利用这些信 息即可描述卫星空间几何分布对定位精度影响的精度因子: 常用的精度因子有: (1)几何精度因子(Geometric Dilution of Precision, GPOP)
式中 , Qx
qYX
qYY
qYZ
R
sin L0
cos L0
0
为坐标转换矩阵,
qZX qZY qZZ
cos B0 cos L0 cos B0 sin L0 sin B0
B0和L0分别为对应的大地纬度和大地经度。
6.1 伪距单点定位
由此可得到另两个常用的精度因子 (4)水平精度因子(Horizontal Dilution of Precision, GPOP)
23934824.154
23978631.5766+43
822.577
24181945.803 24298916.7595+116 967.755
22957572.280 22965399.9529+7 834.145
22385541.968 22355209.7858 30 330.506
ni
1
VX VY
VZ
=i
i0
+cV t
i
S
Ii Ti i
cVtR
若接收机同时接收n( n ≥4)颗卫星,则上式可写为:
6.1 伪距单点定位
l1
l2
l3
RTK单点校正操作步骤

RTK单点校正操作步骤根据您的要求,以下是RTK单点校正的操作步骤,共超过1200个字。
步骤一:准备工作1.确保RTK测量设备及其配件都处于良好的工作状态。
检查电池电量、设备连接线是否正常,确保设备正常工作。
2.选择适当的测量场地。
确保该场地没有高大的建筑物或树木,以减少信号遮挡和多径效应。
3.准备一个已知坐标的控制点,可以是已知坐标点或者在国家通用测绘网上查询的控制点。
步骤二:设置基站1.在一个比较平坦的位置放置基站设备,确保其能够收到卫星的信号。
基站设备应尽量靠近控制点附近,以获得较高的精度。
2.打开基站设备并配置相关参数。
根据设备的使用说明书进行设置,包括坐标系、高程基准、天线高等参数。
3.启动基站的数据记录功能。
将基站设备连接到电脑上,打开相关软件,开始记录基站数据。
4.完成基站的设置后,等待建立差分信号。
基站设备将自动当地的差分基站信号。
步骤三:设置测量设备1.将测量设备与移动站天线连接。
确保连接稳固,没有松动或断开的情况。
2.打开测量设备并进行初始化。
根据设备的使用说明书,选择正确的坐标系、高程基准等参数,并启动数据采集功能。
3.在设备的设置中,选择RTK模式,并选择网络模式。
4.执行单点定位。
等待设备获取到卫星信号,并进行单点定位。
步骤四:测量控制点1.根据现场情况,选择最接近控制点的合适位置,确保能够获得高质量的卫星信号。
2.确保设备已经完成单点定位,并能够稳定地获取卫星信号。
3.使用设备的记录功能,记录下控制点的测量数据。
在设备上完成记录后,将数据存储到设备的存储卡中。
步骤五:数据处理与校正1.将基站数据和移动站数据导入到相关的数据处理软件中。
根据软件的使用说明书,完成数据导入的操作。
2.对基站数据和移动站数据进行转换。
根据软件的要求,将数据转换为适当的坐标系和基准面。
3.运行数据处理软件,对基站数据和移动站数据进行校正。
软件将使用基站数据的差分信号来校正移动站数据,提高测量精度。
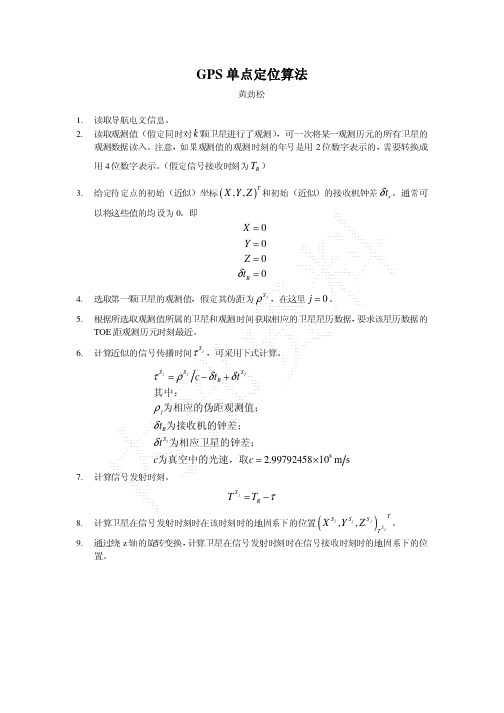
GPS单点定位算法
Sj
15. 16. 17.
18.
选取下一颗卫星的观测值,假定其伪距为 ρ 。 重复 5 – 15,直到处理完所有观测值的观测方程为止。 解算法方程,计算出被估参数近似值的改正数 ( x, y, z, δρ ) , δρ 为由于接收机钟差 所造成的距离误差。 计算出被估参数 ( X , Y , Z , δ t ) 。并将它们分别当作下次迭代计算时的待定点的近似坐 标和近似的接收机钟差。
T r
X =0 Y =0 Z =0
δ tR = 0
4. 5.
6.
选取第一颗卫星的观测值,假定其伪距为 ρ ,在这里 j = 0 。 根据所选取观测值所属的卫星和观测时间获取相应的卫星星历数据, 要求该星历数据的 TOE 距观测历元时刻最近。 计算近似的信号传播时间τ ,可采用下式计算。
Sj
Sj
τ
Sj
N j =N
S
S
S j −1 S
+ n j ; 当j = 0时,N
S
S
S j −1
=0
n j = bm j ⋅ bn j
T Sj T
(
)
m ,n
; 4×4
T
( )n ,m 表示矩阵中第m行第n列的元素
Sj
( B L ) = ( B L ) + (b l ) b ⋅l ) ; ( ) (b l ) = (
Sj T
T
Sj 0
Sj
Sj 1 Sj 2 S
Sj
Sj
13.
计算 O-C 值 l 。具体为:
l
Sj
b3 j = 1.0 = ρ j − R j + c ⋅ δ t j − c ⋅ δ tR
卫星导航定位算法与程序设计_单点定位程序流程
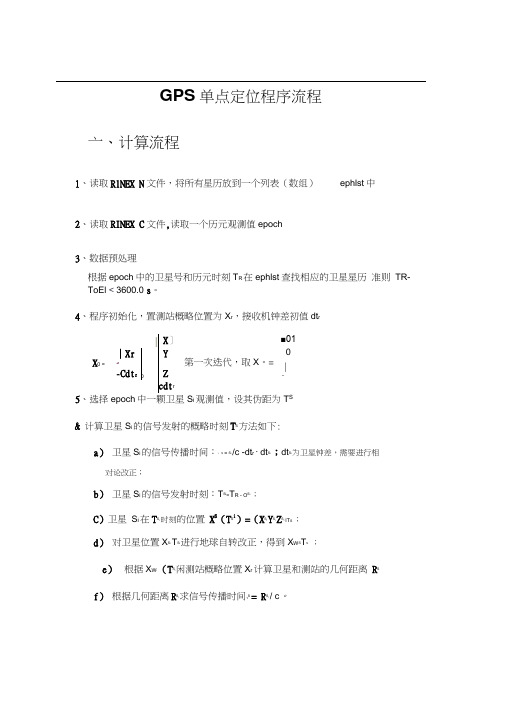
GPS 单点定位程序流程亠、计算流程1、读取RlNEX N 文件,将所有星历放到一个列表(数组)ephlst 中2、读取RINEX C 文件,读取一个历元观测值epoch3、数据预处理根据epoch 中的卫星号和历元时刻T R 在ephlst 查找相应的卫星星历 准则 TR-ToEl < 3600.0 s 。
4、程序初始化,置测站概略位置为X r ,接收机钟差初值dt r5、选择epoch 中一颗卫星S i 观测值,设其伪距为T S& 计算卫星S i 的信号发射的概略时刻T S方法如下:a ) 卫星S i 的信号传播时间:∙°S= S i /c -dt r ∙ dt S i;dt S i为卫星钟差,需要进行相对论改正;b ) 卫星S i 的信号发射时刻:T Si=T R - O S i;C )卫星 S i 在T S i时刻的位置 X S (T Si)=(X S iY S iZS i I T S;d ) 对卫星位置X S iT S i进行地球自转改正,得到X W ST S;e ) 根据X W i(T S i 闲测站概略位置X r 计算卫星和测站的几何距离 R Sf ) 根据几何距离R S i求信号传播时间∙ιS = R S i/ c 。
I X 〕∣Xr1Y-Cdt r 0Zcdt r 一X 0 =第一次迭代,取X 。
=■01 0∣g)如果”I S70S l <10-,则退出迭代。
T l Si=T R―补即为卫星信号发射时刻h)否则-S = .i Si,回带到b)进行迭代。
7、求卫星S i方向余弦SSS(X-X i)bi S i (Y-Y i)-S i (Z-Z i)R S i R S R S8、求卫星S i在观测方程式中的余数项:C dt -∙d trop -'d iono 'D RTCM其中:J S ------ 卫星S i的伪距观测值;R S i――卫星S i到测站的几何距离;C dt S以米表示的卫星S i的钟差;d tro——对流层延迟改正量,单位米,用简化的hopfi模型计算;d iono――电离层延迟改正量,单位米,采用无电离层伪距组合观测值时,此项为0;D RTC M——对伪距的差分改正值,此处为°;9、选择epoch中下一颗卫星S j观测值,设其伪距为10、重复第6—9步,计算每颗卫星的系数和余数项11、将所有卫星的系数组成误差方程,以x,y, Z I Cdt r为未知参数进行求解,形式应该是:AX=Lb S0b S0b2S° 1A= b0 bl: b2 1X = [χy z Cdtl T L=[卢IS …I S I.b S b S i b S 1ji = 0,1, ,svnu mT12、求解法方程— A T PA J A T PL,求出定位结果X 。
GPS单点定位实验报告

GPS单点定位实验报告一、实验目的本实验旨在通过使用全球定位系统(GPS)进行单点定位实验,掌握GPS在实际应用中的基本原理和操作流程。
二、实验设备及材料1.GPS接收器2.笔记本电脑3.GPS信号接收天线4.GPS数据处理软件三、实验原理GPS是基于卫星定位的定位系统,通过接收到来自空中的GPS卫星的信号,并对接收到的信号进行处理,确定观测者的位置。
GPS系统中的接收器会收到至少3颗卫星的信号,通过测量这些卫星信号的到达时间和位置信息,可以计算出观测者的位置。
四、实验步骤1.打开笔记本电脑,并确保已经连接好GPS接收器。
2.启动GPS数据处理软件,并配置相应的参数,如接收频率等。
3.将GPS接收天线安装在距离大约15米的室外开放区域,以确保接收到足够的卫星信号。
4.打开GPS接收器,并等待接收到至少3颗卫星的信号。
5.在软件界面上显示的地图上,观察到卫星的位置,并标记出来。
6.分别记录并输入每颗卫星的位置信息和到达时间。
7.根据接收到的卫星位置和到达时间,使用GPS数据处理软件计算出观测者的位置。
8.将计算结果在地图上显示,并与实际位置进行比对。
五、实验结果在本实验中,成功接收到了4颗GPS卫星的信号,并记录了它们的位置信息和到达时间。
根据这些数据,使用GPS数据处理软件计算得到的观测者位置与实际位置非常接近,误差在5米以内。
六、实验分析在实际应用中,GPS单点定位的精度可达到10米以内,但受到多种因素的影响,如卫星信号强度、接收器精度等,可能会出现一定的误差。
此外,建筑物、树木等阻挡物也会影响卫星信号的接收,进而影响定位精度。
七、实验总结通过本次实验,我对GPS单点定位的原理和操作流程有了更深入的了解。
通过接收到的卫星信号,我们可以计算观测者的位置,并在地图上进行显示。
GPS定位技术在实际生活中有广泛的应用,如导航系统、车辆追踪等。
然而,我们也必须认识到在实际使用中可能会出现一定误差,需要根据具体情况进行补偿或校准。
第五讲-GPS绝对(单点)定位
2020/8/20
GPS技术与应用
11
注意事项
(1)由于未知数Nij与所观测的卫星有关,在不同历元观 测不同卫星时,将会增加新的未知数,这不仅会使数据处
理变得复杂,而且有可能降低解的精度,因此在一个测站
的观测中,尽可能观测同一组卫星是适宜的。
cVtR 接收机钟差改正 cVtis 卫星钟差改正
Ni 整周模糊度改正
(Vion )i 电离层改正 (Vtrop )i 对流层改正
i 星历误差改正 (mul )i 多路径误差改正 i 随机误差改正
近似公式:
i ( X i X )2 (Y i Y )2 (Z i Z )2 cVtR cVtis Ni
i 星历误差改正 (mul )i 多路径误差改正 i 随机误差改正
2020/8/20
GPS技术与应用
7
伪距测量的观测方程
近似公式:
~
i (X i X )2 (Y i Y )2 (Z i Z )2 cVtR cVtis
(Vion )i (Vtrop )i 卫星钟误差经过多项式模型拟合后为微小量,可以忽略;
2020/8/20
GPS技术与应用
2
绝对定位的基本原理
➢ 以GPS卫星和用户接收机天线之间的距离(或距离差) 观测量为基础,根据已知的卫星瞬时坐标,来确定接收 机天线所对应的点位,即观测站的位置。GPS绝对定位 方法的实质是测量学中的空间距离后方交会。原则上观 测站位于以3颗卫星为球心,相应距离为半径的球与观 测站所在平面交线的交点上。
(2)当观测卫星数为nj,观测历元数为nt时,在任一观测 站Ti可得观测量的总数为nj nt,同时待解的未知数包括: 观测站的3个坐标分量, nt个接收机钟差参数和与所测卫 星相应的nj个整周未知数。为了求解,观测量总数必须满
GPS单点定位的原理与方法

GPS单点定位的原理与方法GPS(全球定位系统)单点定位是通过利用卫星信号来计算接收器的位置坐标的一种定位方法。
其原理基于三角测量和卫星轨道测量,具体包括以下几个步骤:1.卫星发射信号:GPS系统由一组人造卫星组成,这些卫星在地球上方不断绕行。
每颗卫星都向地面发射微波信号,包含了卫星的精确位置信息和时间信息。
2.接收器接收信号:GPS接收器是我们手持设备或车载设备中的组成部分,能够接收卫星发射的信号。
至少接收到4个卫星的信号时,GPS接收器开始进行定位计算。
信号的接收通常会受到建筑物、树木、峡谷等遮挡物的干扰。
3.信号时间测量:GPS接收器接收到卫星信号后,会测量信号从卫星发射到接收器接收的时间,根据信号的传播速度得出卫星和接收器之间的距离。
4.三角测量定位:至少接收到4个卫星信号后,GPS接收器会通过三角测量计算出接收器与各个卫星之间的距离差,进而确定接收器所在的位置。
5.计算接收器位置:根据接收器与至少4个卫星之间的距离差,GPS接收器可以利用三角测量原理计算出接收器的空间坐标,即经度、纬度和海拔高度。
6.位置纠正:单点定位的结果通常会受到多种误差的影响,如大气延迟、钟差、多普勒效应等。
为了提高定位的精确度,还需要纠正这些误差。
纠正方法包括差分GPS、RTK(实时动态定位)等。
除了上述的基本原理之外,GPS单点定位还可以通过改进方法来提高定位的精确度。
以下是几种常用的方法:1.多星定位:通过接收更多的卫星信号来计算接收器位置,增加多星定位的可靠性和精度。
2.差分GPS:差分GPS是通过两个或多个接收器同时接收卫星信号,其中一个接收器已知位置,用来纠正目标接收器的误差。
这样可以提高定位的精确度。
3.后处理:将接收器记录到的GPS信号数据回传到办公室,在计算机上进行后期处理,利用更复杂的算法和精确的星历文件来提高定位精度。
4.RTK定位:实时动态定位是一种高精度的GPS定位方法,利用地基台接收器和流动台接收器之间的无线通信,可以实现毫米级的定位精度。
中海达GPS操作说明(杜星明编)
中海达GPS操作说明(杜星明编)中海达GPS操作说明一、单点定位求解七参数(一个已知点A)基准站:任意架设基准站,手薄与基准站连接后,菜单——文件——新建项目——快捷向导——输入项目名称——(弹出坐标系统对话框)选择和已知点对应的坐标系统——(弹出中央子午线经度)将114改成当地中央子午线(本地为111)——回车——(弹出设置基准站对话框)——ALT+A——输入点名——类型:选“当地XYH”——天线高处输入天线高——ALT+C——回车。
移动站:手薄断开基准站,连接移动站。
在A点,按“SP”测量——设置记录点属性——输入点名、天线高——[可以马上修改为已知坐标或者测完后到菜单——查看——坐标库——记录点坐标库——选择已知点名——按3(编辑)]——光标移动到菜单“控制点”按“SP”打勾——将光标移动到“详细”回车。
——ALT+A——输入已知点名(AGC)——类型:选“当地XYH”回车——将坐标值修改为已知坐标——一直回车。
菜单——辅助——计算——七参数——按7(文件)——按1(提取当前记录)——按2(解算)二、两点求转换参数(两个已知点A,B)基准站:任意架设基准站,手薄与基准站连接后,菜单——文件——新建项目——快捷向导——输入项目名称——(弹出坐标系统对话框)选择和已知点对应的坐标系统——(弹出中央子午线经度)将114改成当地中央子午线(本地为111)——回车——(弹出设置基准站对话框)——ALT+A——输入点名——类型:选“GPSBLH”——天线高处输入天线高——ALT+C——回车。
移动站:手薄断开基准站,连接移动站。
在A点,按“SP”测量——设置记录点属性——输入点名、天线高——[可以马上修改为已知坐标或者测完后到菜单——查看——坐标库——记录点坐标库——选择已知点名——按3(编辑)]——光标移动到菜单“控制点”按“SP”打勾——将光标移动到“详细”回车。
——ALT+A——输入已知点名(AGC)——类型:选“工程XYH”回车——将坐标值修改为已知坐标——一直回车。
北斗伪距单点定位算法的流程

北斗伪距单点定位算法的流程北斗伪距单点定位算法是基于卫星信号的到达时间差来确定接收机的位置。
The single-point positioning algorithm for BeiDou pseudorange is based on the arrival time difference of satellite signals to determine the position of the receiver.首先,接收机接收到至少4颗卫星的信号,并记录每颗卫星信号的到达时间。
First, the receiver receives signals from at least 4 satellites and records the arrival time of each satellite signal.然后,接收机通过将到达时间转化为伪距值,并结合卫星位置信息,计算出接收机和每颗卫星之间的距离。
Then, the receiver converts the arrival time into pseudorange values and, combined with satellite positioninformation, calculates the distance between the receiver and each satellite.接着,利用这些距离信息进行计算,确定接收机的位置。
Next, using this distance information for calculation, the position of the receiver is determined.在计算定位结果时,需要考虑卫星钟差和大气延迟等影响因素。
When calculating the positioning result, factors such as satellite clock error and atmospheric delay need to be considered.最终得出接收机的经度、纬度和海拔高度信息。
卫星导航定位算法与程序设计_单点定位程序流程
卫星导航定位算法与程序设计_单点定位程序流程单点定位是卫星导航中最基本的应用,其基本思路是通过接收多颗卫星发送的信号,计算出接收点的位置。
下面是单点定位的程序流程,包括信号接收、时间同步、伪距测量、卫星位置计算和接收点位置计算等过程。
1.信号接收首先,需要接收卫星发送的信号。
接收设备通常包括天线、前端放大器和接收机等部分。
天线用于接收来自卫星的信号,并将其转化为电信号。
前端放大器用于增强信号的强度。
接收机用于解调信号,并转化为数字信号。
2.时间同步接收到的信号包含了卫星发射时的时间信息。
根据信号传播的速度,可以计算信号传播的时间,从而获取卫星发送信号的时刻。
由于信号传播时间非常短(大约为纳秒级别),所以需要高精度的时钟和时间同步技术来确保准确性。
3.伪距测量根据接收到的时间信息,可以计算接收点到卫星的距离,称为伪距。
计算伪距需要考虑信号传播的时间以及信号在大气中的传播速度变化等因素。
此外,由于信号在传播过程中会受到噪声、多径效应等干扰,需要进行滤波和信号处理等技术来提高测量的准确性。
4.卫星位置计算卫星的位置信息是通过星历数据进行描述的。
星历数据包含了卫星的轨道参数、时刻信息等。
根据接收到的伪距数据,可以通过解算的方法计算出卫星的位置。
解算的方法有很多种,常用的有最小二乘法、扩展卡尔曼滤波等。
通过解算,可以得到每颗卫星的位置坐标。
5.接收点位置计算根据接收到多颗卫星的位置信息和伪距数据,可以通过三角测量的方法计算出接收点的位置坐标。
三角测量的原理是利用多个已知位置的点,通过测量到这些点的距离,计算出目标点的位置。
根据接收点到不同卫星的伪距数据,可以得到多个方程,通过求解这些方程可以计算出接收点的坐标。
6.坐标转换和精度提高计算出接收点的坐标后,可以进行坐标转换,将其转化为地理坐标或其他坐标系。
此外,由于测量误差和卫星位置误差等因素,单点定位的精度一般较低。
为了提高精度,可以采用差分定位、精密定位等方法。
rtklib单点定位处理流程
rtklib单点定位处理流程RTKLIB单点定位处理流程概述•RTKLIB是一款开源的GPS/GNSS实时运动定位软件,支持单点定位、差分定位和RTK定位等功能。
•单点定位是基于单个接收器的数据进行定位,是最简单的定位方式之一。
•本文将详细介绍RTKLIB单点定位处理的流程。
数据采集1.连接GPS接收器并打开RTKLIB软件。
2.设置接收器参数,包括波特率、卫星系统等。
3.开始接收数据。
数据预处理1.导入接收器数据到RTKLIB软件。
2.配置测站坐标和接收器类型等参数。
3.设置观测数据的时间和卫星系统。
4.进行数据的预处理,包括轨道平滑和时钟偏差估计等。
电离层延迟校正1.使用电离层模型对接收器数据进行电离层延迟校正。
2.根据历史电离层数据和当前接收器数据进行校正计算。
定位计算1.进行接收机位置解算,得出初始的位置估计值。
2.利用接收机的速度和运动模型进行卡尔曼滤波,得到更精确的位置解算结果。
结果分析1.分析位置解算结果的精度和稳定性。
2.根据定位结果进行误差评估和优化。
结论•RTKLIB单点定位处理流程包括数据采集、数据预处理、电离层延迟校正、定位计算和结果分析等多个步骤。
•通过以上流程,可以得到较为准确的单点定位结果。
•RTKLIB是一款功能强大的定位软件,适用于各种测量和导航应用场景。
以上是RTKLIB单点定位处理的流程介绍,希望对你有所帮助。
注:本文章仅供参考,具体操作请参考RTKLIB软件的官方文档。
•连接GPS接收器和计算机,并确保连接正常。
•打开RTKLIB软件,进入数据采集界面。
•在软件中设置接收器的参数,包括波特率、卫星系统等。
•点击“开始”或类似的按钮开始接收数据。
数据预处理•在RTKLIB软件中导入接收器的数据文件。
•进入数据预处理界面,配置测站坐标和接收器类型等参数。
•设置观测数据的时间范围和卫星系统。
•进行数据的预处理,包括轨道平滑和时钟偏差估计等操作。
电离层延迟校正•使用电离层模型对接收器数据进行电离层延迟校正。
GPS单点定位算法及实现
GPS单点定位算法及实现GPS单点定位算法是通过接收来自卫星的信号,通过计算接收信号到达时间差以及接收信号强度等信息,确定自身的位置坐标。
常见的GPS单点定位算法包括最小二乘法定位算法、加权最小二乘法定位算法、无拓扑算法等。
最小二乘法定位算法是一种基本的GPS定位算法,通过最小化测量误差的平方和,求得位置坐标最优解。
该算法假设接收器没有任何误差,并且卫星几何结构是已知的。
具体实现步骤如下:1.收集卫星信息:获取可见卫星的位置和信号强度信息。
2.数据预处理:对接收信号进行滤波和数据处理,例如去除离群点、噪声滤除等。
3.卫星定位计算:根据接收器和可见卫星之间的距离和相对几何关系,计算每颗卫星与接收器之间的距离。
4.平面定位计算:根据卫星位置和距离信息,使用最小二乘法求取接收器的经度和纬度。
5.高度定位计算:根据卫星位置和距离信息,使用最小二乘法或其他方法求取接收器的高度。
加权最小二乘法定位算法在最小二乘法定位算法的基础上加入对测量数据的加权处理,以提高定位精度。
加权最小二乘法定位算法的实现步骤与最小二乘法定位算法类似,只是在卫星定位计算和平面定位计算中,对每个测量值进行加权处理。
无拓扑算法是一种基于统计的定位算法,不需要事先知道接收器和卫星的几何关系,而是通过分析多个卫星的信息来确定接收器的位置。
其实现步骤如下:1.收集卫星信息:获取可见卫星的位置和信号强度信息。
2.数据预处理:对接收信号进行滤波和数据处理,例如去除离群点、噪声滤除等。
3.卫星选择:选择可见卫星中信号强度最强的几颗卫星。
4.定位计算:根据已选择的卫星信息,使用统计模型或其他算法计算接收器的位置。
1.数据采集与处理:获取和处理接收信号、卫星信息和测量数据,对数据进行有效的滤波和预处理。
2.算法选择与优化:根据定位精度和计算效率的要求,选择合适的算法,并进行算法优化和参数调整。
3.数据处理与结果可视化:对定位结果进行处理和分析,可通过地图等方式可视化结果,以便用户更直观地了解定位情况。
单点定位程序说明
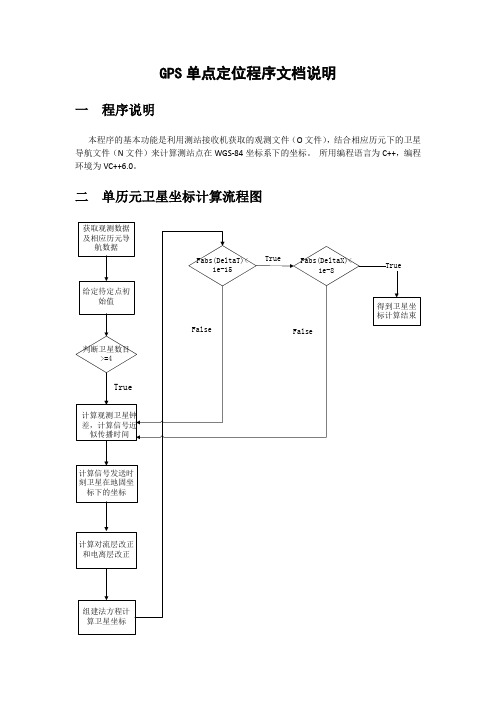
GPS单点定位程序文档说明一程序说明本程序的基本功能是利用测站接收机获取的观测文件(O文件),结合相应历元下的卫星导航文件(N文件)来计算测站点在WGS-84坐标系下的坐标。
所用编程语言为C++,编程环境为VC++6.0。
二单历元卫星坐标计算流程图三程序设计流程图四程序模块说明(一)对类的说明1.PointPosition类double GetDelta_t(CommonTime Toe,CommonTime Toc);用于计算两个历元时刻的时间间隔CoorCartesian ComputeSatCoor(double Tk,OneNavData oneNaveData);利用导航数据计算卫星坐标Bool GetPreciseSatCoor(CommonTimeObsTime,CoorCartesian&Sitecoor , CoorCartesian &Satcoor,OneNavData oneNavData,double SatClkBais);通过迭代得到新号发送时刻的卫星坐标double ComputeSatClkBias(double SendTime_Tk,OneNavData oneNavData);计算卫星的钟差改正Factor ComputeFactors(CoorCartesian &Sitecoor, CoorCartesian &Satcoor, double &satClkBias,double &Tr, double TropDelay, double ionDelay, double p1);计算组建法方程需要的各个元素double ComputeTropDelay(CoorCartesian SatCoor,CoorCartesian SitCoor);计算对流层误差double ComputeIonDelay(const double L1,const double L2);计算电离层误差2.ReadObsData类ReadObsFile(const string& FileName);ObsFileHeader ReadObsHeader(const string &FileName);读取观测文件的头文件部分EntirObsData ReadObsData(const string &FileName);读取观测文件的数据部分3.ReadNavData类NavFileHeader ReadNavHeader(const string &FileName);读取导航文件的头文件部分AllNavData ReadNavData(const string &FileName);读取导航文件的数据部分OneNavData SelectEpochNavData(AllNavData allNavData,string SatPrn,CommonTime ObsTime)查找并获取要计算的观测历元下的导航数据(二)程序模块的连接关系1.分别用文件流打开相应的观测数据文件和星历文件;2.调用ReadObsFile.ReadObsHeader()读取观测文件头文件;3.调用ReadObsFile.ReadObsData()按照观测历元读取观测数据;4调用ReadNavFile.ReadNavHeader()读取导航文件的头文件部分;5调用ReadNavFile.ReadNavData()读取导航文件的数据部分;6 利用循环并调用ReadNavFile.SelectEpochNavData()获取观测历元的导航数据7 调用puteSatCoor()计算卫星坐标8利用puteFactor()计算法方程的各个元素9迭代得到结果。
卫星导航定位算法与程序设计_单点定位程序流程

卫星导航定位算法与程序设计_单点定位程序流程(总5页)-本页仅作为预览文档封面,使用时请删除本页-GPS 单点定位程序流程一、计算流程1、 读取RINEX N 文件,将所有星历放到一个列表(数组)ephlst 中。
2、 读取RINEX O 文件,读取一个历元观测值epoch3、数据预处理根据epoch 中的卫星号和历元时刻R T 在ephlst 查找相应的卫星星历, 准则3600.0R T TOE -<s 。
4、程序初始化,置测站概略位置为r X ,接收机钟差初值r dt 。
000r r r X X Y X cdt Z cdt ⎡⎤⎢⎥⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦第一次迭代,取000000X ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ 5、 选择epoch 中一颗卫星i S 观测值,设其伪距为i S ρ 6、计算卫星i S 的信号发射的概略时刻i s T 方法如下:a) 卫星i S 的信号传播时间:0/i i i S S S r c dt dt τρ=-+;i S dt 为卫星钟差,需要进行相对论改正;b) 卫星i S 的信号发射时刻:0i i S S R T T τ=-; c) 卫星i S 在i S T 时刻的位置()()i i ii iS iT S S S S S T X T X Y Z =;d) 对卫星位置()i i S S X T 进行地球自转改正,得到()ii S S w X T ; e) 根据()i i S S w X T 和测站概略位置r X 计算卫星和测站的几何距离i S Rf) 根据几何距离i S R 求信号传播时间1/i i S S R c τ=。
g) 如果10710i i S S ττ--< ,则退出迭代。
11i i S S R T T τ=-即为卫星信号发射时刻。
h) 否则01i i S S ττ= ,回带到b)进行迭代。
7、求卫星i S 方向余弦()()()0123,,,1iiiiiiiiiiS S S S S S S S S S X X Y Y Z Z b bbbRRR---====8、求卫星i S 在观测方程式中的余数项:i i i i S S S S trop iono RTCM l R c dt d d D ρ=-+⋅--+其中:hopfield 0ii i S i S i S i trop iono RTCM S R S c dt S d d D ρ⋅——卫星的伪距观测值;——卫星到测站的几何距离;——以米表示的卫星的钟差;——对流层延迟改正量,单位米,用简化的模型计算;——电离层延迟改正量,单位米,采用无电离层伪距组合观测值时,此项为;——对伪距的差分改正值,此处为0;9、选择epoch 中下一颗卫星j S 观测值,设其伪距为j Sρ10、 重复第6—9步,计算每颗卫星的系数和余数项11、 将所有卫星的系数组成误差方程,以(),,,r x y z cdt 为未知参数进行求解,形式应该是:AX L =[]()000111010120120121110,1,,1i i i i S S S S S S TS S S S S S b b b b b b A X xyz cdt L l l l b b b i svnum ⎡⎤⎢⎥⎢⎥⎡⎤===⎣⎦⎢⎥⎢⎥⎢⎥⎣⎦=-12、 求解法方程()()1ˆT T XA PA A PL -=,求出定位结果0000ˆˆˆi r r i X X xY Y y X Z Z z cdt cdt cdt ⎡⎤+⎡⎤⎢⎥⎢⎥+⎢⎥⎢⎥==⎢⎥⎢⎥+⎢⎥⎢⎥+⎢⎥⎣⎦⎣⎦13、 与0X 进行比较,判断位置差值,a) 如果各分量差值>,则令0i X X =,返回第6步继续迭代计算。
单点定位设备小博士使用流程

单点定位设备小博士使用流程
一、翻页键:
1按动此键将循环显示各个主页面2从某种操作中退出到主页面电源键:
1持续按住此键将开机或关机。
2短时间按下此键将打开或关闭背景光。
二、上下键:
1在各页面或菜单中,上下移动光标。
2在卫星状态页面中,调节屏幕显示对比度
3在航迹导航页面中,放大或缩小比例尺。
4在罗盘导航页面中,查看各种数据。
输入键:
1激活光标所在选项。
2确认菜单选项。
3在可以进行输入操作的地方输入数据。
ATTENTION:etrex(小博士)被设计为左手握机并操作,但用右手也可以很好地握机和操作,这取决于您的个人习惯。
将接收机拿到室外开阔的地点,显示屏向使其内置天线朝向开阔的天空。
按住电源您将看到欢迎画面,随后进入“卫星状态ATTENTION:当您第一次使用该设备时,置,以后将只需要15-45秒时间来定位。
当足够的卫星被锁定时,页面顶部的窗口航”,如果您的“小博士”无法接收到足够如您正在室内或者当前的GPS卫星信号很好。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS单点定位程序文档说明
一程序说明
本程序的基本功能是利用测站接收机获取的观测文件(O文件),结合相应历元下的卫星导航文件(N文件)来计算测站点在WGS-84坐标系下的坐标。
所用编程语言为C++,编程环境为VC++6.0。
二单历元卫星坐标计算流程图
三程序设计流程图
四程序模块说明
(一)对类的说明
1.PointPosition类
double GetDelta_t(CommonTime Toe,CommonTime Toc);
用于计算两个历元时刻的时间间隔
CoorCartesian ComputeSatCoor(double Tk,OneNavData oneNaveData);
利用导航数据计算卫星坐标
Bool GetPreciseSatCoor(CommonTimeObsTime,CoorCartesian&Sitecoor , CoorCartesian &Satcoor,OneNavData oneNavData,double SatClkBais);
通过迭代得到新号发送时刻的卫星坐标
double ComputeSatClkBias(double SendTime_Tk,OneNavData oneNavData);
计算卫星的钟差改正
Factor ComputeFactors(CoorCartesian &Sitecoor, CoorCartesian &Satcoor, double &satClkBias,double &Tr, double TropDelay, double ionDelay, double p1);
计算组建法方程需要的各个元素
double ComputeTropDelay(CoorCartesian SatCoor,CoorCartesian SitCoor);
计算对流层误差
double ComputeIonDelay(const double L1,const double L2);
计算电离层误差
2.ReadObsData类
ReadObs string& );
Obs ReadObsHeader(const string &);
读取观测文件的头文件部分
EntirObsData ReadObsData(const string &);
读取观测文件的数据部分
3.ReadNavData类
Nav ReadNavHeader(const string &);
读取导航文件的头文件部分
AllNavData ReadNavData(const string &);
读取导航文件的数据部分
OneNavData SelectEpochNavData(AllNavData allNavData,string SatPrn,CommonTime ObsTime)
查找并获取要计算的观测历元下的导航数据
(二)程序模块的连接关系
1.分别用文件流打开相应的观测数据文件和星历文件;
2.调用ReadObs()读取观测文件头文件;
3.调用ReadObs()按照观测历元读取观测数据;
4调用ReadNav()读取导航文件的头文件部分;
5调用ReadNav()读取导航文件的数据部分;
6 利用循环并调用ReadNavFile.SelectEpochNavData()获取观测历元的导航数据
7 调用puteSatCoor()计算卫星坐标
8利用puteFactor()计算法方程的各个元素
9迭代得到结果。
五程序的不足之处
1.程序较多的出现类调其他类中的方法,从而类的独立性较差。
2.在坐标系统中,只进行了空间直角坐标系和大地坐标系的转换,空间直角坐
标系和测站坐标系的转换,没有完全整理坐标转换。
3.计算的精度较低。
4.只利用GPS卫星的观测数据并没有利用Glonass卫星的观测数据,从而使数
据为得到充分利用。