基于Maxwell2D的开关磁阻电动机的仿真研究
基于Matlab的开关磁阻电机控制系统仿真建模研究

Reference speed
Speed controller io*
PI controller
Current co n tro l l e r
speed
p o si ti o n
Current controller
Angle sel e cti on Angle selection
i a,i b,i c
1 SRM 的数学模型
6/4 三相 SRM 是一个高阶、非线性、强耦合的多变量 系统,绕组电流的非正弦与铁心磁通密度的高饱和是 SRM 运行的两大特点[7]。为了便于分析,假定:
·1016·
系统仿真学报
Vol. 17 No. 4 Apr. 2005
(1) 三相绕组对称,每相的两个线圈作正向串联,忽略
效性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:开关磁阻电机 (SRM);仿真建模;Matlab;角位置控制 (APC);电流斩波控制 (CCC)
文章编号:1004-731X (2005) 04-1015-07
中图分类号:TM352
文献标识码:A
Study on Modeling and Simulation of Switched Reluctance Motor Control System Based on Matlab
2.2 速度控制模块
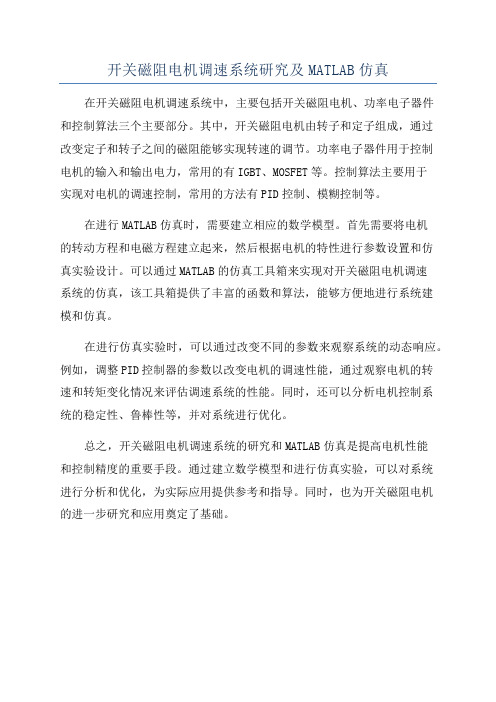
为实现 SRM 性能的快速预测与优化设计,本文在分析 SRM 数学模型的基础上,借助于 Matlab 强大的仿真建模能 力,利用 Simulink 中内含的功能元件,提出了一种基于 Matlab/Simulink 建立 SRM 控制系统仿真模型的新方法,有 效克服了现有 SRM 建模方法存在的不足。其基本思想是: 将 SRM 电 机 控 制 系 统 的 功 能 单 元 模 块 化 , 在 Matlab/Simulink 中建立独立的功能模块:SRM 本体模块、 速度控制模块、电流控制模块、转角选择模块、参数计算 模块等,将这些功能模块进行有机整合,即可搭建出 SRM 控制系统整体设计的仿真模型。其中,速度环中采用 PI 控 制 , 电 流 环 中 将 角 位 置 控 制 ( APC ) 与 电 流 斩 波 控 制 (CCC)相结合,以保证电机高速、低速运行时都有理想 的控制性能。该方法思路清晰,实现便捷,效果理想,仿 真结果证明了该种建模方法的快速性和有效性。
基于MATLAB的开关磁阻电机的噪声问题仿真研究的开题报告

基于MATLAB的开关磁阻电机的噪声问题仿真研究的开题报告一、研究背景及意义开关磁阻电机是一种新型的电机,它具有结构简单、无刷、低噪声、高效率等优点。
尤其是在噪声方面,开关磁阻电机较传统电机(如感应电机、永磁同步电机等)具有更低的噪声水平,成为新能源汽车、家电等领域的研究热点。
因此,开展开关磁阻电机的噪声研究对推动新能源领域的应用具有重要意义。
在开关磁阻电机的研究中,噪声问题一直是一个难点。
目前,在实际应用中发现,开关磁阻电机的噪声问题比较严重,需要进行深入的研究。
而研究开关磁阻电机的噪声问题,需要从其运行机理、噪声来源、噪声管控等方面进行探讨。
二、研究目标本研究基于MATLAB,通过仿真分析开关磁阻电机的运行过程,在此基础上探讨该类型电机的噪声问题,并提出有效的噪声管控方案,以实现电机的低噪声运行。
三、研究内容1.分析开关磁阻电机的运行过程,建立相应的数学模型;2.利用MATLAB软件对电机的运行过程进行仿真分析,探讨电机噪声来源;3.对电机的噪声进行定量评估,建立完整的噪声管控体系;4.评估噪声管控方案的有效性,提出实践指导建议。
四、研究方法与技术路线1.理论研究:阅读相关文献,深入掌握开关磁阻电机的运行原理、噪声来源等基本知识;2.数学建模:利用基本理论知识,建立开关磁阻电机的数学模型;3.仿真分析:基于MATLAB平台,进行电机的运行仿真分析,探讨电机噪声产生原因及机理;4.噪声管控:建立电机噪声管控方案,对其有效性进行评估;5.实践建议:针对实际应用中遇到的问题,提出相关解决方案和建议。
五、研究进度安排第一阶段(1-2个月):对开关磁阻电机及其噪声问题进行文献调研,深入了解相关背景知识。
第二阶段(2-3个月):基于开关磁阻电机的运行原理建立相应的数学模型,利用MATLAB进行仿真分析,探讨噪声问题的来源及机理。
第三阶段(2-3个月):建立电机噪声管控体系,对管控方案进行评估,提出实践建议。
基于Rmxprt与Maxwell2D的开关磁阻电机特性仿真

基于Rmxprt与Maxwell2D的开关磁阻电机特性仿真江华
【期刊名称】《防爆电机》
【年(卷),期】2014(049)006
【摘要】在Ansoft机电系统Rmxprt模块中建立了SRM的二维模型,且在Rmxprt中仿真,得到了开关磁阻电机的相电流、转矩、功率、效率等特性曲线,得出了电机在额定转速下效率最高输出功率却不是最大的结论;并将其导入Maxwell2D中,在XY平面中,对模型分组、材料设置、边界及激励源设置等相关设置后,做了进一步的基于瞬态场的有限元分析,得到了电机在不同时刻的磁力线、磁通密度、磁密矢量等信息;最后通过对比两个仿真结果,再次验证了此建模仿真方法的正确,这为SRM的分析与控制提供了有效的理论依据.
【总页数】5页(P24-28)
【作者】江华
【作者单位】西安科技大学电气与控制工程学院,陕西西安710054
【正文语种】中文
【中图分类】TM301.2;TM352
【相关文献】
1.基于Ansoft Maxwell2D的永磁机构的仿真研究 [J], 陈加明;
2.基于Matlab/Simulink和Ansoft/Rmxprt的开关磁阻电机系统控制仿真研究[J], 赵影;刘娅如
3.基于RMxprt和Maxwell2D对阀门电动装置电磁分析 [J], 童法松
4.基于Maxwell2D的开关磁阻电机特性仿真研究 [J], 邱银;郝润科;赵龙;王磊;祖军
5.基于Maxwell2D的开关磁阻电机特性仿真 [J], 邱银;郝润科;赵龙;王磊
因版权原因,仅展示原文概要,查看原文内容请购买。
开关磁阻电机调速系统研究及MATLAB仿真
开关磁阻电机调速系统研究及MATLAB仿真在开关磁阻电机调速系统中,主要包括开关磁阻电机、功率电子器件
和控制算法三个主要部分。
其中,开关磁阻电机由转子和定子组成,通过
改变定子和转子之间的磁阻能够实现转速的调节。
功率电子器件用于控制
电机的输入和输出电力,常用的有IGBT、MOSFET等。
控制算法主要用于
实现对电机的调速控制,常用的方法有PID控制、模糊控制等。
在进行MATLAB仿真时,需要建立相应的数学模型。
首先需要将电机
的转动方程和电磁方程建立起来,然后根据电机的特性进行参数设置和仿
真实验设计。
可以通过MATLAB的仿真工具箱来实现对开关磁阻电机调速
系统的仿真,该工具箱提供了丰富的函数和算法,能够方便地进行系统建
模和仿真。
在进行仿真实验时,可以通过改变不同的参数来观察系统的动态响应。
例如,调整PID控制器的参数以改变电机的调速性能,通过观察电机的转
速和转矩变化情况来评估调速系统的性能。
同时,还可以分析电机控制系
统的稳定性、鲁棒性等,并对系统进行优化。
总之,开关磁阻电机调速系统的研究和MATLAB仿真是提高电机性能
和控制精度的重要手段。
通过建立数学模型和进行仿真实验,可以对系统
进行分析和优化,为实际应用提供参考和指导。
同时,也为开关磁阻电机
的进一步研究和应用奠定了基础。
基于Matlab的开关磁阻电机控制系统仿真建模新方法

基于Matlab的开关磁阻电机控制系统仿真建模新方法开关磁阻,论文,DSP,控制第18卷第2期浙江万里学院学报Vol.18No.2纪志成,薛花(江南大学控制科学与工程研究中心电气自动化研究所,江苏无锡214122)摘要:在分析开关磁阻电机(SRM)数学模型的基础上,利用C语言编写S-函数,提出了SRM控制系统仿真建模的新方法.在Matlab/Simulink中,构造CME某S-函数的三类简化结构,建立独立的功能模块,如电机本体模块、速度控制模块、电流滞环控制模块等,通过功能模块的有机整合,搭建SRM控制系统快速高效的仿真模型.系统采用双闭环控制:速度环采用PI控制,电流环采用角位置控制(APC)与电流斩波控制(CCC)相结合的方法,保证了SRM在低速或高速运行时都可获得满意的性能.仿真结果证明了采用CME某S-函数方式仿真建模的快速性和有效性.关键词:CME某S-函数;开关磁阻电机(SRM);仿真建模;快速性作者简介:纪志成,江南大学控制科学与工程研究中心电气自动化研究所教授,博士,博士生导师;薛花,江南大学控制科学与工程研究中心博士研究生。
1引言因其结构简单、可靠性高、性能优良、输出转矩大等特点,开关磁阻电机(SRM)应用广泛[1],且随着SRM应用领域的不断拓宽,对电机控制系统设计要求越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短.如何建立有效的SRM控制系统的仿真模型成为电机控制算法设计人员迫切需要解决的关键问题,因此,对于建立电机控制系统仿真模型方法的研究具有十分重要的意义[2,3].对于在Matlab中进行交流异步电机仿真建模方法的研究已成为探讨的热点,例如通过编写m文件可在Simulink环境下实现SRM控制系统的仿真建模[4],虽然m文件形式的S-函数具有容易编写和理解的优点,但由于它在每个仿真步都要激活Matlab解释器,使得仿真速度变慢,且这种方法实质上是一种整体分析法,因而在这一模型基础上修改控制算法或添加、删除闭环就都需对整体系统重新建模.为此,文献[5,6]提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行交流异步电机建模,通过模块组合进行交流异步电机建模,这一方法可观性好,在原有的建模基础上添加、删除闭环或改变控制策略都十分便捷,但模块化建模的方式存在控制策略难以硬件实现的问题.开关磁阻,论文,DSP,控制2浙江万里学院学报2005年4月2CME某S-函数的简化结构利用Matlab/Simulink进行运动控制系统的建模仿真是普遍采用的方法之一,而S-函数,尤其是CME某S-函数,正是整个Simulink动态系统的核心,它不仅提供了增强和扩展Simulink能力的强大机制,同时也是使用RTW(RealTimeWorkhop)实现实时仿真的关键所在,也因此十分适合于复杂动态系统的数学描述,支持连续、离散以及两者混合的线性和非线性系统的仿真建模[7].Matlab提供了名为funtmpl_baic.c的CME某S-函数模板,包含了所有的子程序,较为复杂,本文在此基础上提出了简单实用的三类简化结构,如图1所示.结构A结构B图1CME某文件简化结构结构C结构A:仅包含3个子函数,Initialization子函数完成S-函数的初始化工作,如初始化结构体SimStruct、设置输入/输出口、设置采样时间等;mdlOutput子函数描述S-函数的输出方程,输出值是状态某、输入u和时间t的函数,而不包括任何动态方程(微分或差分)在内;Termination子模块在仿真结束时调用,可在此完成结束仿真所需的工作.结构A仅完成由输入直接计算输出的函数描述,采样时间可为连续的或离散的,但不含状态向量,因而没有mdlUpdate子函数和mdlDerivative子函数.结构B:在结构A的基础上增加了mdlDerivative子函数,用于连续状态的求解.状态向量的一阶导是状态某、输入u和时间t的函数,通过mdlDerivative子函数完成计算,并将结果返回供求解器积数某分.结构C:在结构A的基础上增加了mdlUpdate子函数,用于离散状态的求解.下一步状态向量的值某k+1依赖于当前的状态某、输入u和时间t,通过mdlUpdate子函数完成计算,并通过求解器传递给其他模块.将这三类简化的CME某S-函数有机组合,即可完成SRM控制系统的最小化建模,实现占用最少资源的高效仿真,由于结构简单,不仅可使CME某S-函数编程灵活,删改方便,更确保了CME某S-函数高速仿真的特性.3SRM数学模型与控制系统的建立SRM控制系统采用双闭环控制方案:转速环由PI调节器构成,电流环由角位置控制器(APC)与电流斩波控制器(CCC)复合构成.根据模块化建模的思想,将控制系统分割为各个功能独立的子模块,主要包括:SRM本体模块、速度控制模块、电流控制模块、转角选择模块、参数计算模块和电压逆变模块.利用CME某S-函数编程实现各模块的功能,再将这些功能模块有机整合,即可在Matlab/Simulink中搭建SRM控制系统的仿真模型,实现双闭环的控制算法.各功能模块的构建方法与数学模型简述如下.3.1SRM本体模块电机本体模块是控制系统的仿真模型中的关键部分,描述了SRM的本质属性,该模块完成求取SRM三相相电流、电机转速和位置信号的功能,主要由两个子模块组成:相电流生成子模块和转矩计算子模块.对于6/4三相SRM,第k相绕组的电压平衡方程可表示为LdiLdθUk=Rik+(Lk+ikk)k+ikk(1)ikdtdt开关磁阻,论文,DSP,控制第2期纪志成,薛花:基于Matlab的开关磁阻电机控制系统仿真建模新方法3式中:k=a,b,c;Uk为k相绕组电压;R为转子相电阻;Lk为k相绕组电感;ik为k相绕组电流;θ为转子位移角.根据电压平衡方程式(1)建立相电流生成子模块,模块输入量为电机转速ωr、逆变器输出的各相电压Uk(k=a,b,c)和参数计算模块输出的各相绕组电压计算参数Lt,k和Mk,输出量为各相相电流ik.SRM的电磁转矩方程为Te=运动方程为k=a,b,c∑Te,k,Te,k=θ∫ik0Ψk(ik,θ)dik(2)dωr(3)dt式中:Te为电磁转矩;Te,k为k相电磁转矩;Tl为负载转矩;ωr 为电机机械角速度;J为转动惯量.根据SRM电磁转矩方程式(2)建立转矩计算子模块,模块输入为各相电磁转矩Te,k,通过加和模块即可求得电磁转矩信号Te.同时根据运动方程式(3),由电磁转矩Te和负载转矩Tl,通过加乘、积分环节,即可得转速信号ωr,求得的转速信号经过积分可得到转子位置信号θ.TeTl=J3.2速度控制模块速度控制模块采用PI算法,结构简单,单输入:参考转速和实际转速的差值,单输出:参考相电流某,实现该功能的数学表达式可写为幅值i0某i0=kpe(t)+ki∫e(t)dt(4)0t式中:kp为PI控制器中P(比例)的参数,ki为PI控制器中I(积分)的参数,e(t)为参考转速与实际某转速的差值,即e(t)=wr(t)wr(t).3.3电流控制模块电流控制模块的作用是实现电流APC和CCC方式的复合控制,模块输入为参考相电流幅值i0,位移角θ,转速ωr和SRM本体模块输出的三相相电流ia,ib,ic,输出为逆变器控制信号.当转速ωr大于基速ωb 时,采用APC方式,输出恒功率特性,通过调节开通角θon、关断角θoff,改变相电流峰值、有效值,以达到由转矩调节实现转速调节的目的.APC方式下,固定外加电压Ud,可按比例增大导通角θc=θoffθon,以补偿转矩的下降,实现恒功率输出特性.APC方式下的相电流波形如图2(a)所示.当转速ωr小于基速ωb时,采用CCC方式,输出恒转矩特性,通过电流的限幅控制Ud加在导通相绕组上的有效时间,实现了最大磁链和最大电流的限定.CCC方式下,固定θon、θoff,通过斩波控制外加电某压Ud,若电流超出参考相电流i0幅值上限,则功率开关器件关断,迫使电流下降;若超出参考相电流幅值下限,则功率开关器件导通,又使电流开始回升,因此相电流波形近似“理想平顶波”.CCC方式下的相电流波形如图2(b)所示.电流控制模块采用APC与CCC方式的复合控制,可保证在额定运行曲线下方,SRM可运行在任一希望的机械特性上,实现较宽范围的调速特性,使仿真特性更为准确,模型性能更为优越.L(θLLmini(θL(θL某Lmini(θonoffz(a)onoffz(b)(a)APC方式(b)CCC方式图2相电流波形开关磁阻,论文,DSP,控制4浙江万里学院学报2005年4月3.4转角选择模块转角选择模块实现由位移角信号θ进行电机运行状态选择的功能.SRM相电感L(θ)的变化周期正比D于转子极对数,因此6/4三相SRM相电感的变化周期τr=90.一周期内,转子位置信号与相选择信号的对应关系如表1所示,输出的相选择信号直接输入参数计算模块,进行各相电压方程运算参数和转矩的求取.表1转子位置信号与相选择信号对应关系表3.5参数计算模块位置信号0~π/6相选择信号100对应相a相010π/6~π/3b相参数计算模块利用相选择信号、角位移θ和各001π/3~π/2c相相电流ia,ib,ic,求取参与SRM本体模块中电压平衡方程运算的参量Lt,k,Mk与各相转矩Te,k(k=a,b,c).SRM磁路的非线性、磁通的复杂分布及相间的非线性耦合等因素,使得SRM模型中Lt,k,Mk参数的求取、电磁转矩Te,k的解析计算极为复杂,为以最简洁的近似方法计算出这些参变量,本文采用磁化特性曲线分段线性化的方法,以分饱和段和非饱和段两部分线性特性来近似非线性磁化曲线.基于此准线性模型可推理求得Lt,k,Mk,Te,k的计算公式分别为(Ψadia)0ia≤iLuia≤iΨa0ia≤i,,(5)Lt,a=Ψa==T===Me,aa >0ii>>Lii0iiiaauaaKK2KΨi(d)iiib≤i(6)θθ+≤L()iiiii≤ΨbuΨbb,0b,bb=i2iTe,b==Lt,b=Mb=b=iibθKii>iLuib>ibbKib>iK2KπK(d)Ψicc(θ0+θ)ic≤iicic≤i(7)Ψcicic≤i,ΨcLu+==Ti3=Mc==iLt,c=2ie,cicθKii>iccLuic>iKic>i式中:Lu=Ψminima某为未饱和电感;K=(Ψma某ima某Lu)3.6电压逆变模块β,β为定子极弧;i为磁化曲线开始弯曲处对应的电流值;θ0为电感开始上升变化时对应的位移角.电压逆变模块实现的是逆变器功能,输入为电流控制模块给出逆变控制信号,可根据电机所处的运行阶段输出三相端电压.4SRM控制系统CME某S-函数设计方法Matlab6.5的Simulink环境中,在分析SRM数学模型的基础上,提出了利用CME某S-函数建立SRM图3SRM控制系统仿真建模组成框图SRM双闭环控制系统主要由6个功能模块组成,利用CME某S-函数的三类简化结构,编写程序实现模块功能.其中:①电机本体模块,描述SRM机理特性,具有连续采样时间和连续状态,采用7输入4开关磁阻,论文,DSP,控制第2期纪志成,薛花:基于Matlab的开关磁阻电机控制系统仿真建模新方法5输出的B结构;②速度控制模块,实现PI控制策略,具有离散状态,采样时间1m,采用2输出1输出的C结构;③电流控制模块,实现APC和CCC的复合控制,具有连续采样时间,无状态向量,采用4输入3输出的A结构;④转角选择模块,实现电机运行状态的选择功能,无状态向量,采样时间1m,采用1输入1输出的A结构;⑤参数计算模块,求取电压平衡方程中的运算参量,无状态向量,采样时间0.1m,采用6输出3输出的C结构;⑥电压逆变模块,描述逆变功能,具有连续采样时间,无状态向量,采用3输入3输出的A结构.结构A为CME某S-函数的最简架构,结构B、C是结构A的拓展.模块的输入、输出间为简单的直馈关系,无连续或离散状态向量时,可采用结构A编写CME某S-函数;当需实现一个连续系统时,首先在结构A的基础上,对结构B模板中的mdlInitilizeSize子函数做适当修改,包括对连续状态个数、状态初始值和采样时间的设置等,还需编写mdlDerivative子函数,对于多变量系统,系统结构向量返回的是所有连续状态的导数,最后在mdlOutput子函数中对系统输出方程做一修改;当需实现一个离散系统时,首先在结构A的基础上,对结构C模板中mdlInitilizeSize子函数的离散状态个数、状态初始值和采样时间等设置做适当修改,然后编写mdlUpdate和mdlOutput子函数,分别输入要表示的系统离散状态方程和输出方程.三类简化结构简单实用,有效实现了易编、易改、易理解的编程原则,确保了设计效率与质量.5仿真结果本文基于Matlab/Simulink建立了6/4三相SRM控制系统的仿真模型,并对该模型进行了双闭环控制方式的仿真实验.SRM参数为:电机相电压Ud=300V,最大相电流I0ma某=10A,相绕组电阻R=1.5Ω,定、转子极弧β=βr=30°,饱和时的最大磁通Ψma某=0.8Wb,最小磁通Ψmin=0.16Wb,磁化曲线转折处对应电流值i=2A,转动惯量J=0.002kg·m2,额定转速ne=500rad/,极对数np=2.为了验证所设计的SRM控制系统仿真模型的静、动态性能,系统空载起动,进入稳态运行后,在t=0.3时参考转速由500rad/突变为150rad/,在t=0.5时突加负载转矩Tl=8N·m,在t=0.6时卸载至1N·m,同时参考转速由150rad/突变为700rad/,稳态t=0.8时再突增负载转矩至3N·m,可得系统转速、转矩、a相电流、a相电压波形如图4~7所示.由仿真波形分析可得:在ne=500rad/额定转速下,系统响应快速且平稳,相电流和相波形较为理想,参考电流的限幅作用十分有效;空载稳速运行时,参考转速由500rad/突降至150rad/,电机工作在CCC方式下,再突增为700rad/后,电机工作在APC方式下,突变过程中电机实际转速始终能迅速跟踪给定,超调小,无静差,说明系统反应快速,具有较高的控制精度;在t=0.5,0.6,0.8时突变负载转矩,电机转速有小跳变,但能够快速回复至平稳运行状态,说明系统运行特性对参数扰动有较强的鲁棒性.仿真结果证明了这种新型的基于CME某S-函数SRM仿真建模方法的有效性.)/dar(wW/(rad·-1)t()图t/开关磁阻,论文,DSP,控制6浙江万里学院学报2005年4月Ua/V)V(aUia/A)A(ait/t()t()t/图6a相电流波形图7a相电压波形5结论本文在分析SRM数学模型的基础上,提出了一种基于CME某S-函数仿真建模的新方法.将该方法应用于Simulink环境下SRM控制系统模型的设计,采用经典的速度、电流双闭环控制方法对该建模方法进行了测试,仿真实验结果表明:波形符合理论分析,系统能平稳运行,具有较好的静、动态特性.采用简单明了的三类CME某S-函数简化结构,使得实现、验证控制算法十分便捷,改换或改进控制策略十分简易,只需对部分编程语句进行修改即可实现功能模块的更新或替换.特别的是,与m文件S函数建模和框图建模相比,结合了C语言优势的S-函数仿真速度最快,而且可实现对操作系统和硬件访问的特点,使得该方法为设计和调试实际SRM控制系统提供了有效的手段和工具.。
基于Maxwell2D的开关磁阻电机特性仿真

基于Maxwell2D的开关磁阻电机特性仿真邱银;郝润科;赵龙;王磊【摘要】采用Ansoft公司的RMxprt和Maxwell模块建立了开关磁阻电机的二维模型,并对其进行了有限元分析,得到了开关磁阻电机运行时的转矩、电流、功率等特性曲线,并且通过不同导通角的比较找到了电机运行时转矩脉动较小的控制角,这些工作为电机的实际运行控制提供了依据.%A two-dimensionnal model of the switched reluctance motor was established by using RMxprt and Maxwell2D from Ansoft corporation. Through finite element analysis of this SRM the torque, current, power curve of the switched reluctance motor were given at the run-time. By comparing different conduction angle, could get the control angel at which the motor' s torque ripple was smaller. All this work provided a basic foundation for the actual operation of the motor control applications.【期刊名称】《电机与控制应用》【年(卷),期】2012(039)010【总页数】5页(P5-8,18)【关键词】开关磁阻电机;有限元分析;特性分析【作者】邱银;郝润科;赵龙;王磊【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TM3520 引言开关磁阻电机驱动系统是一种新型的机电一体化驱动装置,由开关磁阻电机(Switched Reluctance Motor,SRM)、功率变换器、位置传感器、控制器四个部分组成,具有结构简单,性能优越,调速性能可靠等优点,在电动车驱动、家用电器、航空工业等领域都有很好的应用前景。
maxwell 2d仿真基本步骤

Maxwell 2D仿真基本步骤Maxwell 2D是一款广泛应用于电磁场仿真领域的工程仿真软件,它能够帮助工程师和科研人员快速准确地模拟和分析各种电磁场问题。
本文将介绍Maxwell 2D的基本步骤,希望对初学者和使用者有所帮助。
1. 准备工作在使用Maxwell 2D进行仿真前,首先需要进行一些准备工作。
包括安装Maxwell 2D软件、熟悉软件界面、了解软件的基本操作方法等。
另外,还需要准备好所需的仿真模型和材料参数等,这些都是进行仿真工作的基础。
2. 创建仿真模型在进行Maxwell 2D仿真之前,首先需要创建一个仿真模型。
这个模型可以是各种电磁场问题中的物理结构,比如电感器、电机、变压器等。
用户可以通过Maxwell 2D软件提供的建模工具来绘制模型的几何结构,也可以导入其他CAD软件中创建好的模型。
创建好仿真模型后,就可以开始设定仿真过程中的各种参数了。
3. 设置仿真参数在Maxwell 2D中,用户可以根据具体的仿真需求来设置各种参数。
可以设置电磁场的激励条件、材料参数、网格划分等。
这些参数的设置将直接影响到仿真结果的准确性和可靠性。
在设置参数时需要根据实际情况进行合理调整,以保证仿真结果的准确性。
4. 进行仿真计算设置好仿真参数后,就可以开始进行仿真计算了。
Maxwell 2D能够通过有限元法等数值方法对电磁场问题进行计算,得到电场分布、磁场分布等仿真结果。
在进行仿真计算的过程中,用户可以通过软件提供的仿真监控工具来实时监控仿真过程,以及对仿真结果进行分析和评估。
5. 分析仿真结果当仿真计算完成后,就可以对仿真结果进行分析了。
用户可以通过Maxwell 2D提供的后处理工具来对仿真结果进行可视化分析,比如绘制电场磁场分布图、计算电感、电阻等参数。
通过对仿真结果的分析,可以更深入地了解电磁场问题的特性和行为规律,为进一步的工程设计和科研工作提供参考。
6. 优化设计方案在对仿真结果进行分析的基础上,用户还可以进一步优化设计方案。
开关磁阻电机驱动系统的仿真研究
Z a g Gu y h n iu
S a d n o ai n l l g fI d sr h n o g V c t a l eo n ty o Co e n
摘
要: 针对开关磁 阻电机 应用开发中的问题 , 采用
设计是现代产品设计的发展趋势。
MAT AB s MuL NK以及有 限元计算软件对开 关磁 阻 L /I I 电机 进行了建模 和仿 真的研究 。 结果证 明了此建 模方 法 的合 理性 、 有效 性 , 为实际 电机 控 制系统 的设计 和调 试 提供了新的思路。 关键 词: 开关磁阻电机 仿真模型 控制器
S RM的基 本 方 程 组可 以总结 如下 :
V i, 2 … , ; k【l i, q
:
Ke wo d :S th d Re u t n e M o o S mu a i n y r s wi e l c a c t r c i lto
M o e Co to lr dl nr l e
开关磁阻电机驱动系统 ( RD 是2 世纪8 S ) 0 0 年代 出现 的一种新型机 电一体化 的可控调速驱 动系统 。 它是电机技 术与现代 电力电子技术 、 微 机 控制技 术 相结合 的产物 。 由于开关磁 阻电机
(l i, f, i; ) f 2 …, k …,q 0 ,
k( , i, i) i n,2 …,q dk
砌 则系 统 的状态 空 间模 型 可表 示 为 : ,
X2
S M模型可 以分为电磁和机械两大部分, R 如
图2 S 。 RM的 电磁 模 型 输 入 绕 组端 电压 和 转 子 位
置角, 输出电磁转矩 ; R S M机械模型输入电磁转 矩和负载转矩 , 输出转子位置角, 两个模块通过 电磁转矩和转子位置角耦合在一起。
基于Ansoft的永磁同步电动机启动过程仿真研究_万红波
less, 绕组为铜 , 定子槽采用梨形槽 , 永 磁体材料采 用 NdFe35.电动机
结构尺寸等基本参数见表 1。
表 1 PMSM主要结构参数 Tab.1 MajorStructuralParametersofPMSM
参 数
数 值 参 数
定子外径 /mm
120 永磁体切向厚度 /mm
定子内径 /mm
Ansoft公司推出的 Maxwell2D电磁场分析软件不仅具 有完善的 静态电磁场分析功能 , 对瞬变电磁场的分析同样卓越 , 具有 强大的后 处理功能 , 这就为开关 磁阻电 动机 参数 的计算 提供 了一 个方 便、快 捷 、准确的计算工具 。
Ansoft软件相对于其他软件有许多新的特点和优势 [ 5] :一是该软 件具有许多开发成熟的电机模 型, 多 数电机都可以 在库中找到 , 给使 用者带来极大的方便 ;二是该软件设 计的电机驱动 电路部分 , 与电机 模型连在一起进行仿真 , 提出了一个 整体分析的思 想;三 是模型建立 后 , 可以输入需要优化的参 数, 软 件可以灵活进 行优化设计 。 本文采 用 Ansoft公司的 Maxwell2D瞬态模块对永磁同步电动机进行建模 , 加 载三相交流电源, 就可以进行汽车永磁同步电机启动性能的仿真研究。
4.2 空载启动转速 、启动转矩和启动电流仿真结果 空载启动转速随时间的变化 曲线仿真 结果如图 7 所示 , 可 以看
· 65·
拖拉机与农用运输车 第 2期 2009年 4月
出 :电机大致 在 0.10 s左右达到 了同步速 , 显然在不同 的时刻必将 得到一族速度曲线图 , 而且启动到 0.012 s时的凸点与脉振转矩在牵 入同步速附近所发生的振荡有关 。
由于异步启动是启动永磁同步电动机的常用方法 , 但电机交 、直 轴磁路磁导不相等以及永磁体 的存在 , 给 启动过程 的计算分 析带来 了困难 。 若启动绕组设计不当 , 即使电机运行性能很好 , 也可能使电 机不能牵入同步运行 [ 4] 。
基于Ansoft+Maxwell+2D的PMSR电机的起动特性的瞬态仿真

问提出一种新的结构,在SR电机中用永磁材料预 先建立一个磁场,通过控制定子绕组电流的方向, 使永磁体产生的磁场和绕组电流产生的磁场相互作 用,就能实现在电感下降区产生正向转矩的设想。
2 PMSR电机分析
在PMSR电机中,磁场由永久磁钢磁场和定子 绕组磁场两部分组成。为便于分析,假设定子铁心 相对磁导率U,=∞,磁路为线性。当考虑永磁铁磁 场时,对每一相绕组,极对极时,磁链值最大;极 对槽时,磁链值最小。当给一相绕组通电时,因为 磁钢的磁阻很大,可视为空气隙,因此磁场分布与 SR电机完全不同,在极对极和极对槽位置时都具有 较小的电感值。最大电感值基本上出现在定、转子 极一半的位置,同时电感值较sR电机小的多,这 为定子绕组的换流带来很大的好处。
Abstract This paper presents a modling of permanent magnetism switched reluctance motor by using ansofi Maxwell 2D,The staring process of PMSR are analyzed based on this model.we can achieve the PMSR characteristic profile gauge from these.The result of simulation Can be of benefits for the controlling PMSR.
(1)永磁体的存在大大减小了绕组电感及电感
变化率,降低了磁阻转矩正。
(2)磁场反应转矩已是主要电磁转矩,与电 流方向无关。为产生正向转矩,在磁链的上升区通 以正向电流,在磁链的下降区通以负向电流。
上述分析表明,PMSR电机实现了在一个开关 周期都能通电的目的,从原理上克服了相对材料利
基于MATLAB的开关磁阻电机调速系统的建模与仿真

1.3当前的主要研究热点和发展方向
开关磁阻电动机调速系统同样也存在一些自身的不足和缺点,这主要表现在以下几个方面:
(1)系统采用的是磁阻式电动机,其能量转换密度低于电磁式电动机。
(2)开关磁阻电动机运行时转矩脉动较大,通常转矩脉动的典型值为±15%,由转矩脉动导致的噪声问题以及待定频率下的谐振问题也较为突出。
(4)起动转矩高,启动电流小
(5)可控参数多,调速性能好
(6)适用于频繁启动、停车以及正反转运行
(7)效率高,损耗小
开关磁阻电动机调速系统作为一种新型的调速系统,兼有直流传动和普通交流传动的优点,以向各种传统调速系统挑战的势头正在逐步应用在家用电器、一般工业、伺服与调速系统、牵引电动机、高速电动机、航天器械以及汽车辅助设备等领域,显示出强大的市场竞争力。
2.2开关磁阻电动机介绍
开关磁阻电机(SR电机)的基本结构及基本原理的提出可追溯到19世纪40年代,那时的电机研究人员已认识到利用顺序磁拉力使电机旋转是简单易行的,但由于电机的运行特性(效率、功率因数、利用系数等)很差,仅应用于少数小功率场所,因而一直没有引起人们的研究兴趣。直到20世纪60年代,大功率晶闸管投入使用,为开关磁阻电机的研究和发展奠定了重要的物质基础。
2.3.2国内研究
从1984年开始,我国许多单位先后开展了SR电机的研究工作,如北京纺织机电研究所、南京航空航天大学、东南大学、福州大学、华中理工大学、华南理工大学、河海大学、合肥工业大学、哈尔滨电工学院、南京调速电机厂、西安微电机研究所、上海电科所、上海中达一斯米克公司等,且开关磁阻电机调速系统的研究被列为中小型电机“七五科研规划项目”。在借鉴国外经验的基础上,我国SR电机调速系统的开发研究起点较高,目前各单位都集中于较优的三相和四相控制方案,至今国内已有十余家单位推出不同性能、不同用途的从1kw至55kw等多种规格的系列产品,应用于纺织、冶金、机械、运输等行业的数十种生产机械和交换器是SRD系统能量传输的关键部分,是影响系统性能价格比的主要因素,由蓄电池或交流电整流后得到的直流电提供电源,起控制绕组开通与关断的作用。由于SR电机绕组电流是单向的,使得功率变换器主电路不仅结构简单,而且相绕组与主开关器件是串联的,可以避免直通短路危险。但是合理选择和设计功率变换器是提高SRD的性能价格比的关键之一,功率变换器主电路形式的选取对SRM的设计也直接产生影响。SR电机的功率变换器主电路的结构形式与供电电压、电动机相数及主开关器件的种类有关。
基于Maxwell2D软件的直线电机性能仿真分析_刘再跃

注:“+”表示电机的初、次级之间为斥力;“ ”表示为吸力,
下同。(条件:相电流 350A,频率 20Hz,气隙 11mm,转差率 s=1)
从表 1 中数据可以看出,在相电流为 350A,
频率为 20Hz,气隙长度为 11mm,转差率 s=1 的条
件下,对于单纯的铝板次级和铁板次级而言,厚度
增加,其推力值和法向力(绝对值)也在增加;对
图 5 铝板(厚 12mm)次级表面电流 受到的电磁力密度矢量图
Fig.5 Vector density diagram of electromagnetic force reacfted to the secondary surface current of sheet aluminium(thickness:12mm)
(Aviation University of Airforce,Changchun 130022)
Abstract:The effects of secondary material to the distribution of magnetic fields and the running performance of linear introduction motor are analyzed by employing Maxwell 2D to simulate linear introduction motor's electromagnetism fields.Methods to adjust end effects and the conclusion of simulation are presented,which have some reference value to the design and development of linear introduction motor in scientific research. Key words:linear introduction motor;simulation;Maxwell 2D
基于AnsoftMaxwell2D的开关磁阻电机仿真研究

基于A n soft M axw ell 2D 的开关磁阻电机仿真研究收稿日期:2004-11-22修回日期:2005-10-08周会军 丁文 鱼振民(西安交通大学电气工程学院,西安,710049)摘 要:基于A nsoft M axw ell 2D 的仿真环境,建立了开关磁阻电动机(SRM )的系统仿真模型。
在建立仿真模型基础上,对电动机的基本特性进行了仿真研究,获得了电机不同位置时的磁场分布、静态电磁参数和动态性能仿真结果。
仿真结果可以用于指导该型电机及其控制系统的设计和优化。
关键词:开关磁电动机;A nsoft 软件;M axw ell ;2维磁场中图分类号:TM 352 文献标识码:A 文章编号:1001-6848(2005)06-0010-03Si m ula tion and Ana lysis of Switched Reluctance M otorZHOU H u i -jun ,D I N G W en ,YU Zhen -m in(Shoo l of E lectrical Engineering ,X i’an J iao tong U niversity ,X i’an ,Ch ina )Abstract :T h is paper introduces the modeling of s w itched reluctance mo to r using M axw ell 2Dof A nsoft co rpo rati on .T he basic perfo r m ances of SRM are analyzed based on the model ,w h ich include the distributi on of m agnetic field at the vari ous ro to r po siti on ,static electrom agnetic characteristics and dynam ic si m ulati on results .T he results o si m ulati on can be available to design and op ti m ize th is new type m ach ine and contro l system .Key words :SRM ;A nsoft ;Si m ulati on ;M axw ell 2D0 引 言开关磁阻电机驱动系统由电机本体(Sw itchedR eluctanceM o to r ,简称SRM )、功率变换器、位置传感器和控制器4部分组成[1]。
基于maxwell 2d的永磁辅助同步磁阻电机的参数化建模及分析

行
[1]& 内对 型电机的研究主
大高校,
大于1998 率
国内
介绍了永磁同步磁阻电机[1]; 工
大 于 2014
对电 大
用
PMASRM进行了有
并发
[2];
大 、大 工大 、 大 、 大 、
大、
工大
对
型电机的研究中& 电
有 司对该
作者简介:魏&(1984—),男,工程师,研究方向为电励磁同步发电机及永磁同步电机设计与应用。 孙德强(1976—),男,高级工程师,研究方向为永磁同步电机设计与应用。 任延生(1972—),男,高级工程师,研究方向为同步电机设计与应用。
0引言
有同步磁阻电机转子通常设计成具有多层
空气磁障的结构。当同步磁阻电机的转子磁障中
SRM)。PMASRM结合了永磁同步电机
(PMSM)和同步磁阻电机的特点,
用磁
阻转矩和永磁转矩,具有功率 高、效率高、体
、
优, 用 的永磁 可以
与 永磁电机 的
&同时,
PMASRM拥有较低反电动势以及较宽的恒功区 间的优 , 成 比 永磁电机 ,
用,
部设计单位和制造企业望而却步。
代计算机仿真软件为 型电机的设计提供了
—种设计技术&
ANSYS Maxwell作为一款功能强大的有限元 软件,可以通过场的方式完成几乎所有的电
基于Maxwell 2D的开关磁阻电动机的仿真研究

才能真实地仿真S M R 的性能, 获得更真实的S M R 瞬 ; 军 态性能, 并为电 机驱动系统的 设计和优化提供依据。 : 营 利用M xe awl2 lD建立S M二维有限元模型, ; R 建 薹
模 过程 如下 : i 吕
2系统仿真模 型的建立
2 1S M 工作 原 理 和仿真 模 型 . R
维普资讯
…
蔓 堕 … . … … … … …… … …… … …… … … 皇 苎
一一
基 于 Ma w l2 的开 关 磁 阻 电动 机 的仿 真 研 究 x e D l
周会 军 , 丁 文 , 振 民 鱼
( 西安交通大学 , 陕西西安 70 4 ) 109 摘 要: 基于 Maw l2 x e D的仿真环境 , l 建立 了开关磁阻电动机 ( R 的系统仿 真模 型 , 开关磁 阻电动机 的基 S M) 对
服系统 各个 领域 , 盖功 率 范 围 1 ~ 覆 0w 5 MW 的各
序地 给各 相定 子 绕组 通 电 , 可 以产 生 持 续 的 电磁 就 转矩 , 使转 子旋 转 。 而
-c Ⅱ
; i i
种 高低 速驱 动 系统 , 呈现 强 大 的市 场 潜力 。
帚 tp/ tI 《《W. oo / T
Байду номын сангаас
由于开关 磁 阻 电动机 、 功率 变换 器 、 控制 器 三者
A sf公 司 的 Maw l2 是一 个 功 能 强 大 、 not x e D l 结
之 间 的强耦合 特 征 , 只有使 S M在 外 电路 的控 制 下 R
果精 确 、 易于 使 用 的 二 维 电磁 场 有 限元 分 析 软 件 。 本 文 采用 Maw l2 x e D软件 建立 S M 模型 , l R 功率 变换 器模 型 和驱动 电路 模 型 , 完成 了开 关 磁 阻 电动 机 驱 动 系统 的仿真 研究 。
基于Maxwell 2D自起动单相永磁同步电动机的设计分析

关键 词 :自起 动;单相 永磁 同步 电动机 ;Ma x we l l 2 D;有 限元分 析 De s i g n a nd Ana l y s i s o f Li ne — - S t a r t S i ng l e — - Pha s e Pe r ma n e n t M a g ne t S y nc hr o no us Mo t o r Ba s e d o n M a x we l l 2 D
An s o f t / Ma x we l 1 2 D s i mu l a t e s t a t i c a n d d y na mi c pe r f o r ma n c e of t h e mo t o r . Ea c h p e r f o f na i n c e i n de x i S
永磁 同步 电动机 进行 了电磁 设计 分析 ,并利 用 电磁 场有 限元分 析软件 A n s o t f / Ma x w e l l 2 D 对 电机 的静 态和 动态性 能进行 仿 真分析 ,仿 真与 测试 得到 的各项 性 能指标 的误 差都 在 一定 范 围 内,验
证 了模 型仿 真与分析 的正确 性 。
Ke y wo r d s :l i n e — s t a r t :s i ng l e — p h a s e p e r ma n e n t ma g ne t s yn c h r o no u s mo t o r :M a x we l l 2 D;f ini t e
l 自起动 单相 永磁 同步电动机 的电磁设计
Abs t r a c t Us i n g e l e c t r o ma g n e t i c d e s i g n c o mbi ne d wi t h f in i t e e l e me nt a n a l ys i s me t h o d,t o
基于Maxwell2D的混合励磁双凸极电机仿真研究

基于Maxwell2D的混合励磁双凸极电机仿真分析摘要:基于混合励磁双凸极电机原理,利用Ansoft公司的Maxwell 2D 瞬态模块建立了混合励磁双凸极(hybrid excited doubly salient,简称HEDS)电机的仿真模型,对HEDS电机性能进行了瞬态仿真研究,并分析了调节励磁直流对转矩脉动的影响。
关键词:混合励磁双凸极电机;Maxwell2D;瞬态仿真;转矩脉动0 引言混合励磁双凸极电动机是一种新型的电动机, 其电磁特性有待进一步深入研究。
在混合励磁双凸极(HEDS)电机[1,2]的定子上,既有永磁体又有电励磁绕组,通过改变电励磁绕组电流的大小和方向,实现了由永磁体和电励磁绕组共同产生的电机内气隙磁场平滑调节与控制,有效解决了双凸极永磁电机[3]难以实现电机气隙弱磁控制、恒功率调速范围较小的不足,在电动汽车等需宽调速直接驱动的场合具有较好的应用前景,且该电机结构新颖,励磁控制简单,调磁效果明显,励磁损耗小,具有较高的研究和实用价值[4]。
HEDS电机由于其定、转子极均为凸极结构,存在着显著的边缘效应和高度的局部饱和现象,所以电机内磁场空间分布非常复杂,并且,电机在运行过程中,对于不同的负载和转速,磁通、电流、转矩各量均呈现出不同的变化波形,因此,在进行电机内部磁场分析和电机性能计算时,采用有限元分析法是十分有效的。
由于,HEDS电机、功率变换器、控制器三者之间的强耦合特征, 所以使得HEDS电机在外电路的控制下,直接使用有限元方法对电机的电磁场进行分析和计算,能更真实地仿真其性能,获得更加精确的计算结果。
本文将应用Ansoft公司的Maxwell2D软件模块来建立一个HEDS电机模型,并对该电机模型的性能进行了瞬态仿真研究,同时仿真分析了直流励磁对输出转矩脉动的影响,为混合励磁双凸极电机的优化设计和励磁控制的优化提供一定的指导。
1 HEDS电机结构混合励磁双凸极电机的基本结构与开关磁阻电机类似, 其定、转子均为凸极齿槽结构, 定子和转子铁芯均由硅钢片迭压而成, 定子铁芯上镶嵌永磁体。
基于Maxwell 2D的永磁同步电动机磁极优化设计

= 引言
转 矩 波 动 是 伺 服 系 统 重 要 的 指 标 之 一 ,以数控 机 床 为 例 ,转 矩 波 动 过 大 的 伺 服 系 统 加 工 出 来 的 工 件切 削 面 刀 纹 紊 乱 ,影响加工精度和表面粗糙度; 在 电 液 伺 服 上 ,转 矩 波 动 过 大 会 使 油 缸 压 力 不 稳 定 , 影响工件的成型质量,同时转矩波动还是机械震动 和 噪 声 的 主 要 诱 因 。永 磁 同 步 电 动 机 转 矩 波 动 是 齿 槽 转 矩 和 纹 波 转 矩 共 同 引 起 的 ,纹 波 转 矩 是 由 电 流 和 反 电 势 波 形 的 偏 差 引 起 的 [1],对 此 优 化 反 电 势 波 形和降低齿槽转矩至关重要。为了缩短开发周期和 成 本 ,无特殊安装尺寸要求的永磁同步电动机,通 常选用比同规格异步电动机小一个机座号的异步电 动机定子冲片,因此永磁同步电动机的转子成为主 要 的 优 化 对 象 。本 文 将 分 别 运 用 偏 心 磁 极 和 不 同 极
第 51卷 第 5 期
微电机
V〇L 5 L No.5
2018 年 5 月____________________________________MICROMOTORS_________________________________________ May.2018
基 于 Maxwell 2 D 的 永 磁 同 步 电 动 机 磁 极 优 化 设 计
5期
唐先全:基 于 Maxwell 2D 的永磁同步电动机磁极优化设计
基于Maxwell2D的SRM特性分析

[ 1 ] 刘迪吉. 开关磁阻调速电动机 [M ]. 机械工业出版社 , 1994.
2008年第 41卷第 1期 (总第 169期 )
[ 2 ] 王宏华. 开关型磁阻电机调速控制技术 [M ]. 机械工业出版 社 , 1995.
[ 3 ] 詹琼华. 开关磁阻电动机 [M ]. 华中理工大学出版社 , 1992. [ 4 ] 吴 建华. 开关 磁阻电机 设计与 应用 [M ]. 机 械 工 业 出 版
2 小 结
8 /6结构的 SR 电机在改变定子绕组通电方向 后通过定子极和转子极的磁力线条数基本没有变 化 , 只是经过了不同的转子极而已 , 6 /4 结构的 SR 电机也是如此 , 改变通电方向后的磁力线以及 磁场强度也是对称的变化 , 使得产生的转矩力不 会发生变化 , 也就是说 8 /6、 6 /4 结构的 SR 电机 除了结构上的对称之外 , 在一相或者几相通电的
不同时起动转矩比较
激励电 流 (A)
堵转转矩 (N·m )
iA = iB = iC NNN - SSS NSS - SNN NSN - SNS NNS - SSN
5
01393 01560 01578 01521
10
11575 21066 21314 21077
15
31021 41088 51183 41391
参考文献
[ 1 ] 陈峥 , 齐蓉. 基于 DSP的开关磁阻电机控制器设计 [ J ]. 中 小型电机 , 2005, (5).
[ 2 ] 王宏华. 开关型磁阻电动机调速控制技术 [M ]. 北京 : 机械 工业出版社 , 1995.
[ 3 ] 薛梅. 基于模糊神经网络的开关磁阻电机自适应控制 [ D ]. 天津 : 天津大学. 2005, 8.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
行的位置 ,为功率变换器提供正确的换相信息 。利
用 M axwell 2D 提供的电路元件建立简单的驱动电
路模型 [ 4 ] ,如图 3 所示 。电压控
制开关 S1 ~S6 的通断受到驱动 电压源 VA 、VB 、VC 控 制 , 驱动 电 压源为位置变量 P 的函数 ,产生 脉冲电压信号 ,如图 4所示 。 图 3 驱动电路模型
图 4 驱动电压源波形
基 于
3 系统仿真结果及其分析
本文中样机的额定数据及结构参数如表 1 所
示 。开关磁阻电机采用 6 / 4极结构 ,功率变换器采
的
表 1 样机的额定数据及结构参数
开
额定功率 / kW
0. 55
定子轭高 /mm
11
关
额定电压 /V
270 (DC) 转子轭高 /mm
10
磁
额定转速 / r·m in - 1
线与转子槽中心线重合位置定义为 0°(机械角度 ,
下同 ) 。C相首先开通 , 导通顺序为 C →B →A →C, 12 每相导通相差 30°,周期为 90°。按下面两种控制策
(下转第 16页 )
D e设sgi计na分n析danalysis 家 标 准 突 减 负 载 < 20 % 、突 微加特负电机载 < 1520%07的年要第求3期,稳
关键词 :开关磁阻电动机 ; Ansoft;仿真 中图分类号 : TM 352 文献标识码 : A 文章编号 : 1004 - 7018( 2007) 03 - 0011 - 02
S im ula tion and Ana lysis of Sw itched Reluctance M otor Ba sed on An soft ZHOU Hu i - jun, D IN G W en, YU Z hen - m in
计 尤其是如何选择最优的开通角和关断角 。
参考文献
16 [ 1 ] 吴建华. 开关磁阻电机设பைடு நூலகம்与应用 [M ]. 北京 :机械工业出版
社 , 2000 [ 2 ] 王宏华. 新型交流电动机及其控制技术系列讲座 (1 ) - 开关磁
阻电动机 [ J ]. 机械制造与自动化 , 2004, (1) : 91~95 [ 3 ] 鲁军勇 ,梁得亮 ,丰问阳. 基于 Ansoft的永磁直线无刷直流电
[ 4 ] 周双喜 ,李丹. 同步发电机数字式励磁调节器 [M ]. 北京 :中国 电力出版社 , 1998
[ 5 ] 苏奎峰 ,李强. TMS320F2812原理与开发 [M ]. 北京 :电子工业 出版社 , 2005
[ 6 ] Texas Instruments Inc. TMS320F2812 D igital Signal Processors Data Manual[ R ]. TI公司 , 2004
动机的仿真研究 [ J ]. 中小型电机 , 2004, 31 (1) : 18~20 [ 4 ] Scott Stanton. Analysis of a Dual Channel Switched Reluctance Mo2
tor/ Generator[M ]. Ansoft Corporation, 2004
[ 7 ] 何建峰 , 项安 , 季国瑜. 基于 DSP 控制的电压调节器的研制 [ J ]. 江西电力 , 2003, (2) : 1~3
图 9 突减负载 100% , cosφ = 0. 8的线电压瞬态曲线
从上述实验波形可以看出 ,设计的数字式柴油 发电机励磁控制器稳态效果良好 ,暂态指标小于国
0 °, 关 断 角
θ off
=
为了实现电流斩波控制 (简称为 CCC) ,避免过大的
25
°,导通角
θ c
= 25°。
电流和磁链峰值 ,得到恒转矩机械特性 。
控制策略
(二
)
:开通角
θ on
=
10
°,关断
角
θ off
=
40
°,导通角
θ c
= 30°。
本文对样机进行
了仿真 ,得到了电机磁
场分 布 、电 磁 转 矩 、相
(Xi’an J iaotong University, Xi’an 710049, China)
Abstract: The modeling of sw itched reluctance motor usingM axwell 2D was introduced. The basic performance of SRM was analyzed based on the model. The results of simulation can be available to design and op tim ize this new type machine and control system.
Key words: sw itched reluctance motor( SRM ) ; Ansoft; simulation
1 引 言
开关磁阻电动机驱动系统由开关磁阻电动机 (以下简称 SRM ) 、功率变换器 、位置传感器 (或无位 置传感器 ) 、控制器四个部分组成 [ 1 ] 。开关磁阻电 动机驱动系统是 20世纪 80年代迅速发展起来的一 种新型调速驱动系统 ,它结构简单 ,坚固耐用 ,调速 范围宽 ,调速性能优异 ,而且在整个调速范围内都具 有较高的效率 ,系统可靠性高 ,是各国研究和开发的 热点之一 。开关磁阻电动机产品已广泛或开始应用 于电动车驱动 、家用电器 、通用工业 、航空工业和伺 服系统各个领域 ,覆盖功率范围 10 W ~5 MW 的各 种高低速驱动系统 ,呈现强大的市场潜力 。
关 磁
(3) 确定电机材料属性 ;
阻
(4) 确定有限元计算的边界条件和外加源参
电 动
数;
机 的
(5) 确定计算过程中是否考虑各种损耗 ;
仿
(6) 确定动态参量 ,包括 :确定运动边界 ,确定
真 研
外加载荷 ,确定时间步长等 。
究
2. 2 功率变换器模型
功率变换器模型如图 2 所示 。其中 S1 ~S6 为 11
之间的强耦合特征 ,只有使 SRM 在外电路的控制下
才 能真实地仿真 SRM的性能 ,获得更真实的 SRM瞬
基 于
态性能 ,并为电机驱动系统的设计和优化提供依据 。
利用 M axwell 2D 建立 SRM 二维有限元模型 ,建
模过程如下 [ 3 ] :
(1) 选择求解平面 ;
的 开
(2) 确定电机结构尺寸数据 ,画出电机模型 ;
机 ,定子上有集中绕组 ,转子既无绕组又无永磁体 , 径向相 对 的 两 个 绕 组 串 联 构 成 一 对 磁 极 形 成 一 相 [ 2 ] 。图 1为一典型的三相 6 /4 极 SR 电动机结构 原理图 (图中只画出其中一相绕组及其主电路 ) 。
收稿日期 : 2005 - 10 - 25
图 1 三相 6 /4极 SR电动机结构原理图
从而为三相电流提供正确的换相信息 。由于 Ansoft 带有位置变量 P,我们可以利用变量 P 得到转子运
可以看出 ,电流斩波使得电流趋于平缓 ,有效地避免 了电流的峰值 。图 7为不同控制策略下的电磁转矩 波形 ,从图中可以看出 ,图 7b比图 7a的转矩脉动明 显减小 ;使用电流斩波控制有效地避免了过大的转 矩峰值 ,达到恒转矩的特性 。
微特电机 2007年第 3期
D e设sgi计na分n析danalysis 基于 Maxwell 2D 的开关磁阻电动机的仿真研究
周会军 ,丁 文 ,鱼振民
(西安交通大学 ,陕西西安 710049)
摘 要 :基于 M axwell 2D 的仿真环境 ,建立了开关磁阻电动机 ( SRM )的系统仿真模型 ,对开关磁阻电动机的基 本特性进行了仿真研究 。仿真结果可以用于指导这种新型电机及其控制系统的设计和优化 。
Ansoft公司的 M axwell 2D 是一个功能强大 、结 果精确 、易于使用的二维电磁场有限元分析软件 。 本文采用 M axwell 2D 软件建立 SRM 模型 ,功率变换 器模型和驱动电路模型 ,完成了开关磁阻电动机驱 动系统的仿真研究 。
2 系统仿真模型的建立
2. 1 SRM 工作原理和仿真模型 开关磁阻电动机是双凸极结构可变磁阻电动
作者简介 :周会军 ( 1979 - ) ,男 ,硕士研究生 ,主要从事开关磁 阻电机研究 。
图 8 突减负载 100% , cosφ = 1的线电压瞬态曲线
本文设计了基于 TM S320F2812 控制的谐波励 磁同步发电机的数字电压调节器 ,采用参数自整定 模糊 P ID 控制策略 ,通过 MOSFET功率器件进行励 磁电流的 PWM 调节 。充分利用 DSP的快速运算能 力和片内丰富的外设资源 ,使 DSP与其他功能模块 融合成整体 ;使用 eCAN 现场总线构建网络 ,保证通 信的高度可靠性和稳定性 。通过现场实验所得结果 表明 ,该调节器具有较好的动 、静态性能 ,调节速度 快 ,调节曲线平滑 ,完全满足规定的性能指标 。
当定子中一相通以激励电流时 ,根据磁通欲沿
磁阻最小路径闭合的原理 ,从而在定 、转子气隙间产
生磁拉力 ,距离该相定子极最近的一对转子极就被
吸引而向着定子极中心线的方向运动 。如果连续顺
序地给各相定子绕组通电 ,就可以产生持续的电磁
转矩 ,而使转子旋转 。
由于开关磁阻电动机 、功率变换器 、控制器三者
参考文献
[ 1 ] 郑秋玲. 同步发电机无刷励磁系统的设计方案 [ J ]. 电机技术. 2001, ( 2) : 14~16
[ 2 ] 唐志平. 同步发电机自励磁研究 [ J ]. 电网技术 , 1999, 23 ( 10 ) : 15 ~24