DMARD08 Datasheet V1.0
ADC0808S125资料
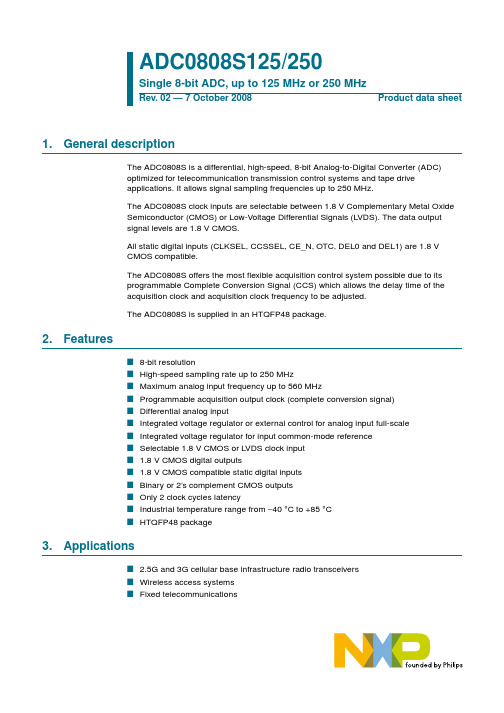
CLOCK DRIVER
ADC0808S
LATCH
17 26
CCS CCSSEL
IN INN
33 32
TRACK AND HOLD
8
RESISTOR LADDERS
ADC CORE
LATCH
8
D0 to D7 21 OTC
FSIN/ REFSEL
30 U/I LATCH
20
IR
INTERNAL REFERENCE
元器件交易网
ADC0808S125/250
Single 8-bit ADC, up to 125 MHz or 250 MHz
Rev. 02 — 7 October 2008 Product data sheet
1. General description
The ADC0808S is a differential, high-speed, 8-bit Analog-to-Digital Converter (ADC) optimized for telecommunication transmission control systems and tape drive applications. It allows signal sampling frequencies up to 250 MHz. The ADC0808S clock inputs are selectable between 1.8 V Complementary Metal Oxide Semiconductor (CMOS) or Low-Voltage Differential Signals (LVDS). The data output signal levels are 1.8 V CMOS. All static digital inputs (CLKSEL, CCSSEL, CE_N, OTC, DEL0 and DEL1) are 1.8 V CMOS compatible. The ADC0808S offers the most flexible acquisition control system possible due to its programmable Complete Conversion Signal (CCS) which allows the delay time of the acquisition clock and acquisition clock frequency to be adjusted. The ADC0808S is supplied in an HTQFP48 package.
双8位高速AD转换器 JM08D1000产品手册
VCMO
共模电压。当输入信号采用 AC 耦合时,为在 VIN +和 VIN-的共模电压, 当输入信号采用 DC 耦合时。此引脚应接地时。该引脚具有 100 μA 的 电流源/沉的驱动能力。
VBG CalRun
带隙输出电压,该引脚具有 100 μA 的电流源/沉的驱动能力。 校准运行指示。该引脚为逻辑高时,表示电路校准正在运行。
CLK+ CLK-
为 ADC 的 LVDS 时钟输入引脚。差分时钟信号必须以交流方式 (a.c.coupled)加在这些引脚上。输入信号在时钟 CLK+的下降沿采样。
VINI+,VINI−, VINQ+,VINQ−
模拟信号差分输入。当 FSR 为低时,差分输入信号为 650mVP-P,当 FSR 为高时,差分输入信号为 870mVP-P。
FSR/ECE
全刻度范围选择和扩展控制使能。在非扩展控制模式下,拉高时,设置 满量程差动输入电压范围为 650mVP-P。拉低时, 设置满量程差动输入 电压范围为 870mVP-P,以降代 VIN 的输入电压范围。,降低 VIN 的 输入电平。当启用 扩展控制模式时,即当采用串行接口和控制寄存器 时,该引脚浮动或将其连接到 VA/2。
输出
输出 输出 输出 电源 地 地
11
VINI+
12
GND
13
VA
14
FSR/ECE
15
DCLK_RST
16
VA
17
VA
18
CLK+
19
CLK-
20
VA
21
GND
22
VINQ+
23
VINQ-
斑马技术公司DS8108数字扫描仪产品参考指南说明书

A D转换器ADC08

A D转换器ADC0804如图,为单片机AD转换器的一种:ADC0804单片集成A/D转换器。
它采用CMOS工艺20引脚集成芯片,分辩率为8位,转换时间为100µs,输入电压范围为0~5V。
芯片内具有三态输出数据锁存器,可直接接在数据总线上。
各引脚名称及作用如下:VIN(+),VIN(-)——两模拟信号输入端,用以接收单极性、双极性和差模输入信号。
DB7~DB0——具有三态特性数字信号输出口。
AGND——模拟信号地。
DGND——数字信号地。
CLK——时钟信号输入端。
CLKR——内部时钟发生器的外接电阻端,与CLK端配合可由芯片自身产生时钟脉冲,其频率为1/(1.1RC)。
CS#---片选信号输入端,低电平有效,一旦CS#有效,表明A/D转换器被选中,可启动工作。
WR#---写信号输入,低电平启动A/D转换。
RD#---读信号输入,低电平输出端有效。
INTR#---A/D转换结束信号,低电平有效表示本次转换已完成。
VREF/2---参考电平输入,决定量化单位。
VCC---芯片电源5V输入。
打开ADC0804的数据手册,我们可以看到以下典型的电路接法:我们可以用仿真软件画出来:接下来,我们分析一下上图的工作原理:①ADC0804的片选端CS连接U2锁存哭的Q7输出端,我们可通过控制锁存器来控制CS,这样接的原因是TX-1C实验板扩展的外围太多,没有多余的I/O口独立控制ADC0804的CS 端,所以选择U2。
②VIN(+)接电位器的中间滑动端,VIN(-)接地,因为这两端可以输入差分电压,即它可测量VIN(+)与VIN(-)之间的电压,当VIN(-)接地时,VIN(+)端的电压即为ADC0804的模拟输入电压。
VIN(+)与电位器之间串联一个10kΩ电阻,目的是限制流入VIN(+)端的电流,防止电流过大而烧坏A/D芯片,当用短路帽短接插针ADIN后,电位器的中间滑动端便通过电阻R12与VIN(+)连接,此时调节电位器的旋钮,其中间滑动端的电压便在0~VCC变化,进而ADC0804的数字输出端也在0x00~0xFF 变化。
AD9608 Datasheet说明书

ADI 中文版数据手册是英文版数据手册的译文,敬请谅解翻译中可能存在的语言组织或翻译错误,ADI 不对翻译中存在的差异或由此产生的错误负责。
如需确认任何词语的准确性,请参考ADI 提供的最新英文版数据手册。
10位、125/105 MSPS 、1.8 V双通道模数转换器(ADC)AD9608Rev. 0Information furnished by Analog Devices is believed to be accurate and reliable. However , no responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other rights of third parties that may result from its use. Speci cations subject to change without notice. No license is granted by implication or otherwise under any patent or patent rights of Analog Devices. T rademarks and registered trademarks are the property of their respective owners.One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.Tel: 781.329.4700 Fax: 781.461.3113 ©2011 Analog Devices, Inc. All rights reserved.功能框图VIN+A VIN–AVREF SENSE VCM RBIAS VIN–BVIN+BORA D0A D9A DCOA DRVDDORB D9B D0B DCOBSDIO AGNDAVDDSCLK SPIPROGRAMMING DATAM U X O P T I O NPDWN DFS CLK+CLK–MODE CONTROLSDCS DUTY CYCLE STABILIZER SYNC DIVIDE 1TO 8OEBCSBREF SELECTADCC M O S /L VD S O U T P U T B U F FE RADCC M O S /L VD S O U T P U T B U F FE RAD9608NOTES1. PIN NAMES ARE FOR THE CMOS PIN CONFIGURATION ONLY; SEE FIGURE 7 FOR LVDS PIN NAMES.09977-001图1.1 该产品受美国专利保护。
8通道8位模_数转换器ADC0808_0809原理及应用

网络纵横
2007年第11期 132
8通道8位模/数转换器ADC0808/0809原理及应用
金笛 ODR-C08 USB至RS232 422 485格力转换器 说明书

ODR-C08用户手册USB至RS232/422/485隔离转换器2006年六月印刷 Rev 1.2O-dear International Co., Ltd台湾(ROC)台北县三重市兴德路111-2号12楼电话:886-2-85122893 传真:886-2-85124968网址:版权版权声明:为了改善可靠性、设计和功能,本手册中的信息如有改变恕不另行通知且厂商亦不承担责任。
未经厂商允许不得以任何形式对本手册中的内容进行翻版、复制或传播。
本手册中提及的产品只为识别目的而被提及。
手册中出现的产品名可能是或不是各自公司的注册商标或版权。
1.简介 (3)1-1特点 (3)1-2规格 (3)2.硬件说明 (4)2-1 操作盘配置 (4)2-2 LED指示灯 (4)2-3串行连接 (4)2-4电源连接 (4)2-5 USB连接 (5)2-6 RS485配线 (5)2-7 RS422配线 (5)2-8 RS232配线 (5)2-9 USB电缆配线 (6)3.ODR-C08软件安装 (6)4. 删除或更新ODR-C08驱动程序 (8)5. 终端电阻 (9)5-1 RS422终端电阻连接 (9)5-2 RS485终端电阻连接 (9)5-3终端电阻规格 (9)6.测试ODR-C08的方法 (10)6-1 Res422回路回送测试 (10)6-2 RS232回路回送测试 (10)6-3回路回送测试软件 (10)7. 测试RS485的方法 (11)7-1 RS485针配线 (12)1. 简介ODR-C08允许用户通过USB接口将串口设备与系统连接。
数据格式自动检测和波特率自动切换功能使ODR-C08能够自动检测数据流和切换数据线的方向,同时无需进行外部切换设置可自动为RS232/RS422/485信号设置任意波特率。
在各数据线上装有3000VDC 的隔离和内部过电压保护,ODR-C08使主计算机和模块本身完全免受破坏性电压的损坏和未调电压输入的危险。
基于51单片机实现ADC0808数模转换与显示

基于51单片机实现ADC0808数模转换与显示LT摘要通过上学期对数据采集的学习,让我对A/D转化器有了一定的了解.A/D转换器是把采集到的采样模拟信号量化和编码后,转换成数字信号并输出的一种器件.而现在A/D转换电路已集成在一块芯片上.本课程设计采用芯片是ADC0808.ADC0808是带有8位A/D转换器、8路多路开关以及微处理机兼容的控制逻辑的CMOS组件。
它是逐次逼近式A/D转换器,可以和单片机直接接口。
本课程设计以AT89C51单片机为核心,实现ADC0808的数模转换与显示,然后把转换后的结果显示在数码管上。
关键字:数据采集,A/D转化器,ADC0808,逐次逼近式,单片机目录一、设计目的 (1)二、设计要求和设计指标 (1)三、设计内容 (1)3.1 芯片简介 (1)3.1.1 A/D转换模块 (1)3.1.2 AT89C51单片机的结构原理与引脚功能 (4)3.2电路设计 (7)3.3程序设计 (9)四、本设计改进建议 (11)五、总结 (12)六、主要参考文献 (12)附录 (12)一、设计目的本课程设计的目的就是要锻炼学生的实际动手能力。
在理论学习的基础上,通过完成一个具有综合功能的小系统,使学生将课堂上学到的理论知识与实际应用结合起来,对电子电路、电子元器件等方面的知识进一步加深认识,同时在软件编程、调试、相关仪器设备的使用技能等方面得到较全面的锻炼和提高,为今后能够独立设计单片机应用系统的开发设计工作打下一定的基础。
二、设计要求和设计指标以AT89C51单片机为核心,实现ADC0808的数模转换与显示。
转换后的结果显示在数码管上。
三、设计内容3.1 芯片简介3.1.1 A/D转换模块ADC0808是带有8位A/D转换器、8路多路开关以及微处理机兼容的控制[1]逻辑的CMOS组件。
它是逐次逼近式A/D转换器,可以和单片机直接接口。
(1)ADC0808的内部逻辑结构由下图3-1-1可知,ADC0808由一个8路模拟开关、一个地址锁存与译码器、一个A/D转换器和一个三态输出锁存器组成。
MW5108_Datasheet_V1.0
MW 5108 Data sheet MW5108 Datas
MICOV Technologies Co., Ltd
Revision 1.0
Copyright reserved by micov
MICOV Technologies Co., Ltd
©2005-2012
Line out
O SC
DAC
U S B H ost
U S B 2.0 H ost S IE M CU U S B 2.0 D evice M P3 Decoder KEY
U S B D evice
V IN VBAT 3.3V 1.8V
G P IO LDO Card Controller PW M
G P IO VBAT
2 主要特性
� � � � � � � � � � � � � � � � � � 内置高性能功放直接驱动喇叭 内置程序无需烧录 内置升压电路为 USB 设备供电 内置断点记忆存储器 内置 USB 读卡器支持直接读写 SD/TF/MMC 卡 内置 24bit 音频解码器 支持 MP3 MPEG 1/2 layer III,8KHz~48KHz, 8Kbps~320Kbps 支持从 SD/TF/MMC 卡播放 支持从 U 盘播放 支持音效 EQ (Normal, Rock, Pop, Classic, Soft, Dance, Bass) 支持 32 级音量调节 支持音频线路输出 支持多路模拟音频输入 支持软开关进行开机和关机 支持多种 FM 芯片 支持多种 LED 屏 支持 I2C 接口进行功能扩展 QFP48 封装
/ / / / / / / / /
AO AI AI AO P AI AI P P
HSJ08电机驱动芯片数据手册_V1.2
路
AGND
过热保护电路
6 AGND
VDD 4
VDD
栅
驱
动
OUTA 8
电
路
PGND VDD
栅
驱
动
OUTB 5
电
路
PGND
7 PGND
INB
OUTA
OUTB
L
Z
Z
L
H
L
H
L
H
H
L
L
输入信号
INA L INB
正转
H
L
反转
L
H
刹车
H
L
H
待机
功能 待机 正转 反转 刹车
马达两端电压 VDD
0(VOUTA-VOUTB )
逻辑电源 VCC 对地电容 C2 必须至少需要 4.7uF,实际应用时不需要靠近芯片单独添加一个电容,可以与其 它控制芯片(RX2、MCU)等共用。如果 VCC 对地没有任何电容,当电路因过载进入过热保护模式后,电路可 能会进入锁定状态。进入锁定状态后,必须重新改变一次输入信号的状态,电路才能恢复正常。只要 VCC 对地有超过 4.7uF 电容,电路就不会出现锁定状态。
12节锂电池供电的马达驱动订购信息产品型号hsj08封装sop8工作温度2085rev1220140216hsj08引脚排列引脚定义vccoutainapgndinbagndvddoutb引脚名称vccinainbvddoutbagndpgndouta输入输出引脚功能描述逻辑控制电源端正转逻辑输入反转逻辑输入功率电源端反转输出逻辑控制电路接地端输出功率管接地端正转输出功能框图vccvccvddina125k电平转换电路agndvccpgndoutainb125kpgndvdd电平转换电路agndoutbpgnd逻辑真值表ina功能待机反转刹车典型波形示意图ina输入信号inb待机马达两端电压vdd0voutavoutbvddrev1220140216hsj08绝对最大额定值ta25参数最大逻辑控制电源电压最大功率电源电压最大外加输出端电压最大外加输入电压最大峰值输出电流最大功耗结到环境热阻工作温度范围储存温度焊接温度esd注注
迈来芯芯片datasheet
FeaturesMicrocontroller: MLX16-FX RISC CPUo16 bit RISC CPU with 20DMIPS and Power-Saving-Modeso Co-processor for fast multiplication and divisiono Flash and EEPROM memory with EECprotocol TruSense Motor Control Technologyand slope control for optimal EMC and thermal performance during power N-FET switching o Monitoring of Drain-Source voltages of the N-FETsPeripheryo 4 independent 16 bit timer modules with capture and compare, and additional software timero 3 programmable 12 bit PWM units with programmable frequencieso10 bit ADC converter (2µs conversion time) and DMA accesso On-chip temperature sensor with ±10K accuracyo System-clock-independent fully integrated watchdogo32 MHz ±5% internal RC oscillator with PLLo Optional crystal oscillatoro Load dump and brown out interrupt functiono Integrated shunt current amplifier with programmable gainApplicationsThe MLX81205/07/10/15 controls BLDC motors via external FET transistors for:Contents1.FUNCTIONAL DIAGRAM (5)2.PIN DESCRIPTION (6)3.777 4.8810111213 5.1414141415 6.1616167.178.181. Functional DiagramHS2T......f mainFigure 1 - Block Diagram Black: common for all versions,Blue: additional pins / functionality for MLX81207,Blue + red: additional pins / functionality for MLX81210 / MLX81215Table 3 - Pin Description MLX81205 / MLX81207 / MLX81210 / MLX81215 3.Electrical CharacteristicsTable 5 - Absolute Maximum Ratings[1] Target temperature specification after qualification. With temperature applications at TA>125°C a reduction of chip internal power dissipation with external supply transistor is mandatory. The extended temperature range is only allowed for a limited period of time, customer’s mission profile has to be agreed by Melexis as a mandatory part of the Part Submission Warrant.4.Application ExamplesThe following sections show typical application examples[1].externalThecan beof the [1]4.2 Sensor-less BLDC Motor Control on the LIN-Bus or via PWM-Interface withreverse polarity protection in the high side pathIn the sample application of Figure 3, the MLX81207 has been selected in order to benefit from the external high side reverse polarity protection possibility compared to the application shown in section 4.1.All other remarks from the previous application example remain valid.Figure 3 – Typical Sensor-less BLDC Motor Control Application Example with MLX812074.3 Sensor based BLDC Motor ControlIn the sample application of, Figure 4, the MLX81207 can realize the driving of a BLDC motor with three Hall sensors. An external P-FET is used to derive the 3.3V supply with a higher current capability in order to bring power consumption outside the MLX81207.4.4 Sensor-less BLDC Motor Control with absolute position sensingIn the sample application of Figure 5, the MLX81210 is working with an absolute position sensor in order to measure the position of the gear shaft in throttle valve application systems or any other similar applications, where absolute precise position sensing is requested.4.5 Sensor-less BLDC Motor Control via a CAN-Bus-InterfaceIn this sample application the MLX81215 can realize the sensor-less driving of a BLDC motor via a CAN-Bus Interface. System wake-up on CAN-bus traffic is possible. The 5V and a 3.3V voltage supply needed for the CAN-Bus, is generated via external N-FET control in order to limit the power dissipation in the package.The motor current can be monitored via shunt resistors in the ground and battery path in case the application requests a double side monitoring for security reasons.Figure 6 – Typical BLDC Motor Control Application Example on the CAN-Bus with MLX812155. Mechanical Specification5.1 QFN5.1.1. QFN32 5x5 (32 leads)Symbol [1][2]Table 6 – QFN32 5x5 Package Dimensions5.1.2. QFN48 7x7 (48 leads)Symbol [1][2]AA1 A3bDD2EE2eLN [3] ND [4] NE [4] 0.80 00.18 5.00 5.00 0.45 0.85 0.02 0.25 5.10 5.10 0.50Min QFN48 Nom Max0.90 0.05 0.20 0.30 7.00 5.20 7.00 5.20 0.50 0.55481212Table 7 - QFN48 7x7 Package Dimensions[1]Dimensions and tolerances conform to ASME Y14.5M-1994 [2] All dimensions are in Millimeters. All angels are in degrees [3] N is the total number of terminals[4]ND and NE refer to the number of terminals on each D and E side respectively5.2 TQFP EP 48 7x7 (48 leads)Table 8 – TQFP EP 7x7 Package DimensionsNotes:1. All Dimensioning and Tolerances conform to ASME Y14.5M-1994,∆2. Datum Plane [-|-|-] located at Mould Parting Line and coincident with Lead, where Lead exists, plastic body at bottom of parting line. ∆3. Datum [A-B] and [-D-] to be determined at centerline between leads where leads exist, plastic body at datum plane [-|-|-]∆4. To be determined at seating plane [-C-]∆5. Dimensions D1 and E1 do not include Mould protrusion. Dimensions D1 and E1 do not include mould protrusion. Allowable mould protrusion is 0.254 mm on D1 and E1 dimensions.6. 'N' is the total number of terminals∆7. These dimensions to be determined at datum plane [-|-|-]8. Package top dimensions are smaller than bottom dimensions and top of package will not overhang bottom of package.∆9. Dimension b does not include dam bar protrusion, allowable dam bar protrusion shall be 0.08mm total in excess of the "b"dimension at maximum material condition, dam bar can not be located on the lower radius of the foot.10. Controlling dimension millimeter.11. Maximum allowable die thickness to be assembled in this package family is 0.38mm12. This outline conforms to JEDEC publication 95 Registration MS-026, Variation ABA, ABC & ABD.∆13. A1 is defined as the distance from the seating plane to the lowest point of the package body.∆14. Dimension D2 and E2 represent the size of the exposed pad. The actual dimensions are specified ion the bonding diagram, and are independent from die size.15. Exposed pad shall be coplanar with bottom of package within 0.05.6.Marking/Order Code 6.1 Marking MLX81205/07/10/157.Assembly InformationThis Melexis device is classified and qualified regarding soldering technology, solder ability and moisture sensitivity level, as defined in this specification, according to following test methods: •IPC/JEDEC J-STD-0208.DisclaimerThe product abstract just provides an overview of the described devices. Please consult the complete product specification/datasheet in its latest revision for any detailed information.Devices sold by Melexis are covered by the warranty and patent indemnification provisions appearing in its Term of Sale. Melexis makes no warranty, express, statutory, implied, or by description regarding theextendedmilitary, For the latest version of this document, go to our website atOr for additional information contact Melexis Direct:Europe, Africa, Asia: America:Phone: +32 1367 0495 Phone: +1 248 306 5400E-mail: sales_europe@ E-mail: sales_usa@ISO/TS16949 and ISO14001 Certified。
adc0809中文资料_数据手册_参数

万联芯城 电子元器件物料全国供应,专业提 供电子元器件原装现货产品,1 片起订,价格优势明显,电子元 器件采购网万联芯城目前为长电科技,顺络电子,先科 ST 等多 家知名原厂的指定授权代理商,专为客户提供电子元器件配单业 务,提交物料清单即可当天报价当天发货,点击进入万联芯城。
ቤተ መጻሕፍቲ ባይዱ
特点描述:ADC0808, ADC0809数据采集元件2。容易接口到所有微处理器的一个单片 CMOS设备与一个8位模数- - -·操作比率或与5 VDC或数字转换器,8通道多路复用器 和模拟跨调整电压参考微处理器兼容, ADC0809控制逻辑。8位·无零或全尺寸调整需 求/D转换器使用逐次逼近作为转换技术。该转换器具有高·8通道多路复用器,具有地 址逻辑阻抗斩波稳定比较器、256R·0V到VC, ADC0809C的输入距离演化分频器和一 个·输出满足TTL电压水平指定的逐次逼近寄存器。8通道多路复用器可以直接接入任 何8-单端·ADC0808,相当于mm74c949模拟信号。·ADC0809相当于mm74c949 -1,该 设备无需外部零位和全比例调整。EasyinterfacingtoKEY SPECIFICATIONSmicroprocessors提供的门锁和·决议:8 Bitsdecoded输入和多路复用器 地址锁存的TTL·总未经调整的错误:±½L SB和±1 LSBTRI-STATE输出。·单电源:5 vdcadc0808、ADC0809的设计为·低功耗:15 mww优化,采用了最理想的几种A/D转换 技术。ADC0808·转换时间:100μsadc0809提供高速,高精 度,minimaltemperaturedependence excellentlong-termaccuracy和可重复 性,minimalpower消耗。这些特性使得该设备非常适合, ADC0809从过程和机器控制到消 费者和汽车应用的应用。16通道多路复用器,具有普通输出(样本/holdport)的 seeADC0816datasheet。(SeeAN-247(文献号SNOA595)获取更多信息。图1所示。PDIP PackageFigure 2。这些设备具有有限的内置ESD保护。在储存或处理过程中,应将引线 短接在一起,或将设备置于导电泡沫中,以防止对MOS门的静电损坏。绝对最大额定 参数(1)(2)(3)电源电压(VCC)(4)6.5 vvoltage在任何销除控制输入(VCC + 0.3 v) 0.3 v电压 控制输入 0.3 v + 15(启动、OE时钟,啤酒,添加,添加B,C)添加存储温度范围 65°C + 150° CPackage耗散TA = 25°C875 mWLead Temp。(焊接,10秒)PDIP包(塑料)260°CPLCC PackageVapor阶段(60秒)215°CIn, ADC0809frared(15秒)220°CESD易感性(5)400 v(1)绝 对最大额定参数表明超过这个限制可能发生损坏设备。直流和交流电机规格notapply当 操作设备超出指定的操作条件。(2)所有电压, ADC0809测量接地,除非另有说明。(3)如 果需要军事/航空指定, ADC0809的设备,请联系TI销售办事处/经销商的可用性和规范。 (4)一个齐纳二极管存在,在内部,从VCC接地,典型的7直流击穿电压。(5)人体模型,100 pF放电通过1.5 kΩ电阻器。操作条件(1)(2)温度RangeTMIN≤TA≤达峰时间 40° C≤TA≤+ 85°CRange VCC4.5 VDC的6.0 VDC(1)绝对最大额定参数表明超过这个限制 可能发生损坏设备。(2)除另有规定外,所有电压都是根据G, ADC0809ND测量的。电 特性——转换器SpecificationsConverter规格:VCC = 5 VDC = VREF +,VREF( )=接 地,TMIN≤TA≤最高温度和fCLK = 640 kHz,除非另有说 明。SymbolParameterConditionsMinTypMaxUnitsADC080825°C±½LSBTotal未经调整的 错误(1)TMIN达峰时间±¾LSB, ADC0809(1)总未经调整的误差包括抵消,全面,线性和多 路复用器错误。参见图5。这些A/Ds都不需要零或全尺寸调整。但是,如果对于非0.0V 的模拟输入需要一个全部为零的代码,或者如果存在一个窄的全尺寸跨度(for)转换器 特性, ADC0809这个单片机数据采集系统的核心是它的8位模数转换器。, ADC0809转换 器的设计是为了在广泛的温度范围内提供快速、准确和可重复的转换。转换器分为三 个主要部分:256R阶梯网络、逐次逼近寄存器和计算机。转换器的数字输出为正 真。256R梯形网络方法(图3)是通过传统的R/2R梯形图来选择的,因为它具有单调的单 调性,保证了没有丢失的数字代码。单调性在闭环反馈控制系统中尤为重要。非单调 关系会引起振荡,对系统来说是灾难性的。此外,256R网络不会引起参考电压的负载 变化。图3中阶梯网的底电阻和顶电阻与网络的夹持器不相同。这些电阻的差异导致输 出特性与传输曲线的零点和满刻度点对称。第一个输出转, ADC0809换发生在模拟 signalhas达到+½LSB和成功输出转换发生以后每1 LSB全面。逐次逼近寄存器(SAR)执行 8次迭代,以近似输入电压。对于任何sar类型的转换器,n位转换器都需要n次迭代。 图4显示了一个典型的3位转换器示例。在ADC0808, ADC0809中,使用256Rnetwork将逼 近技术扩展到8位。A/D转换器的逐次逼近寄存器(SAR)在开始逆变启动脉冲的正边缘 重新设置。转换开始于开始转换脉冲的下降边缘。进程中的转换将被接收到一个新的 开始转换脉冲而中断。通过将转换结束 (EOC)输出与SC输入绑定,可以实现连续转换。如果在这种模式下使用,则需要在启 动后使用外部启动转换脉冲。, ADC0809在开始转换的上升边缘之后,转换结束将在0 到8个时钟脉冲之间降低。A/D转换器最重要的部分是比较器。这个部分负责整个转换 器的最终精度。它也是比较器漂移,对设备的可靠性影响最大。一种斩波稳定的比较 器提供了最有效的方法来满足所有变换器的要求。, ADC0809斩波稳定比较器将直流输 入信号转换成交流信号。该信号通过高增益交流放大器馈送,并恢复直流电平。这种
ADC0808中文资料_数据手册_参数

Operating Conditions (1)(2)
Temperature Range Range of VCC
TMIN≤TA≤TMAX −40°C≤TA≤+85°C ቤተ መጻሕፍቲ ባይዱ.5 VDC to 6.0 VDC
(1) Absolute Maximum Ratings indicate limits beyond which damage to the device may occur. DC and AC electrical specifications do not apply when operating the device beyond its specified operating conditions.
KEY SPECIFICATIONS
• Resolution: 8 Bits • Total Unadjusted Error: ±½ LSB and ±1 LSB • Single Supply: 5 VDC • Low Power: 15 mW • Conversion Time: 100 μs
Figure 2. PLCC
See Package N0028E
Package
See Package FN0028A
These devices have limited built-in ESD protection. The leads should be shorted together or the device placed in conductive foam during storage or handling to prevent electrostatic damage to the MOS gates.
(2021年整理)adc0808中文资料

adc0808中文资料编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(adc0808中文资料)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为adc0808中文资料的全部内容。
11.2。
4 典型的集成ADC芯片为了满足多种需要,目前国内外各半导体器件生产厂家设计并生产出了多种多样的ADC芯片。
仅美国AD公司的ADC产品就有几十个系列、近百种型号之多.从性能上讲,它们有的精度高、速度快,有的则价格低廉.从功能上讲,有的不仅具有A/D转换的基本功能,还包括内部放大器和三态输出锁存器;有的甚至还包括多路开关、采样保持器等,已发展为一个单片的小型数据采集系统。
尽管ADC芯片的品种、型号很多,其内部功能强弱、转换速度快慢、转换精度高低有很大差别,但从用户最关心的外特性看,无论哪种芯片,都必不可少地要包括以下四种基本信号引脚端:模拟信号输入端(单极性或双极性);数字量输出端(并行或串行);转换启动信号输入端;转换结束信号输出端。
除此之外,各种不同型号的芯片可能还会有一些其他各不相同的控制信号端.选用ADC芯片时,除了必须考虑各种技术要求外,通常还需了解芯片以下两方面的特性.(1)数字输出的方式是否有可控三态输出。
有可控三态输出的ADC 芯片允许输出线与微机系统的数据总线直接相连,并在转换结束后利用读数信号RD选通三态门,将转换结果送上总线。
没有可控三态输出(包括内部根本没有输出三态门和虽有三态门、但外部不可控两种情况)的ADC芯片则不允许数据输出线与系统的数据总线直接相连,而必须通过I/O接口与MPU交换信息。
(2)启动转换的控制方式是脉冲控制式还是电平控制式.对脉冲启动转换的ADC芯片,只要在其启动转换引脚上施加一个宽度符合芯片要求的脉冲信号,就能启动转换并自动完成。
ADC0808模数转换

ADC0808模数转换——51单片机的Proteus实验
实验原理
51单片机的一个I/O口接ADC0808获得电压经过模数转换后的数据,再通过另一个I/O口控制数码管显示得到的数字。
clr P3.6;关闭LED3
setb P2.0;开启0808
mov R6,#0FFH;等待转换
djnz R6,$
clr P2.0
setb p2.1;给0808读信号
movx A,@DPTR;读
nop
clr p2.1;清除0808读信号
mov B,#100
div AB
lcall SEG7;取数字段码
setb P3.4;开LED1
clr P3.5;关LED2
clr P3.6;关LED3
mov P1,A;送数
lcall DLY
mov A,B
mov B,#10
div AB
lcall SEG7
clr P3.4;关LED1
clr P3.6;关LED3
setb P3.5
mov P1,Alcall DLYmo Nhomakorabea A,B
lcall SEG7
clr P3.4;关LED1
clr P3.5;关LED3
setb P3.6
mov P1,A
lcall DLY
sjmp LOOP
SEG7:
inc A
movc A,@A+PC
RET
DB0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H
8位双极性D-A转换器-可产生正弦波等波形
8位双极性D-A转换器-可产生正弦波等波形电路的功能8位双极性DAC的功能是用数字来产生波形。
它形成的波形频率可达1MHZ左右。
本电路除可用作普通中速DA转换外,还可用作数字合成电路的振荡输出电路。
DAC08本身只能输出电流,为了进行电流电压转换,加了调整OP 放大器。
电路工作原理IC1是8位的数据锁存电路。
在同一时刻把8位数据送人DAC08可减少因时间差而引起的误差。
由于电流输出端的稳定时间很短,为85NS,对后级电压转换电路转换速度要求较高,所以后级用了高速OP放大器。
电阻R2用来确定基准电流,通常满量程时为2MA,但本电路取1MA。
数字数据为00H时,+IO=0MA,为FFE时+IO=0.9961MA,IO端输入负极性的电流零电平输出时基本上是数字数据的中心值。
数字数据为8FM时,+IO=0.5MA,IO=0.4961MA,+IO与IO之间有3.9UA的偏差,换算成电压则为19.53MV。
用调节置偏的VR1使电路置信。
为了防止数据改变时过渡特性产生过冲,电路中加了电容C4、C5容量为5~10PF。
十六进制数据大于8FH时,输出电压为正,小于8FH时为负,输出电压的倒相由数字数据完成,也可通过切换DAV08的4、2引线进行模拟倒相。
元件的选择输出电压的精度和稳定度取决于基准电压VRBF和电阻R2~R4,为了改变或VEBF,可把R2的一部分改为可变电阻。
由于分辨率是8位,+1LSB的电压为正负39MV,OP放大器的置信漂移不会产生影响,但选用时要注意其交流特性。
调整本电路是为产生波形而设计的,所以只靠静态调整还不行。
为了把数字数据调整输入IC1中,应把重点放在最终输出的波形上。
为了对各部件进行单体调整,应配备存有波形数据的PROM、地址计数器等,接在时钟计数和锁存器上进行调试。
如果电路组装不好,输出波形就会叠加须状脉冲,在一定程度上可用电容C4和C5除去。
置仿调整(VR1)可通过输入数据7FH或8FH来进行。
ADC08D1500

ADC08D1500High Performance,Low Power,Dual 8-Bit,1.5GSPS A/D ConverterGeneral DescriptionNote:This product is currently in development.-ALL specifications are design targets and are subject to change.The ADC08D1500is a dual,low power,high performance CMOS analog-to-digital converter that digitizes signals to 8bits resolution at sampling rates up to 1.7GSPS.Consuming a typical 1.9Watts at 1.5GSPS from a single 1.9Volt supply,this device is guaranteed to have no missing codes over the full operating temperature range.The unique folding and interpolating architecture,the fully differential comparator design,the innovative design of the internal sample-and-hold amplifier and the self-calibration scheme enable a very flat response of all dynamic parameters beyond Nyquist,producing a high 7.25ENOB with a 748MHz input signal and a 1.5GHz sample rate while providing a 10-18B.E.R.Output formatting is offset binary and the LVDS digital out-puts are compliant with IEEE 1596.3-1996,with the excep-tion of an adjustable common mode voltage between 0.8V and 1.2V.Each converter has a 1:2demultiplexer that feeds two LVDS buses and reduces the output data rate on each bus to half the sampling rate.The two converters can be interleaved and used as a single 3GSPS ADC.The converter typically consumes less than 3.5mW in the Power Down Mode and is available in a 128-lead,thermally enhanced exposed pad LQFP and operates over the Indus-trial (-40˚C ≤T A ≤+85˚C)temperature range.Featuresn Internal Sample-and-Holdn Single +1.9V ±0.1V Operationn Choice of SDR or DDR output clocking n Interleave Mode for 2x Sampling Rate n Multiple ADC Synchronization Capability n Guaranteed No Missing Codesn Serial Interface for Extended Controln Fine Adjustment of Input Full-Scale Range and Offset nDuty Cycle Corrected Sample ClockKey Specificationsn Resolution8Bitsn Max Conversion Rate 1.5GSPS (min)n Bit Error Rate10-18(typ)n ENOB @748MHz Input 7.25Bits (typ)n DNL±0.15LSB (typ)nPower Consumption —Operating1.9W (typ)—Power Down Mode3.5mW (typ)Applicationsn Direct RF Down Conversion n Digital Oscilloscopes n Satellite Set-top boxes n Communications Systems nTest InstrumentationBlock Diagram20152153PRELIMINARYJune 2005ADC08D1500High Performance,Low Power,Dual 8-Bit,1.5GSPS A/D Converter©2005National Semiconductor Corporation Ordering InformationIndustrial Temperature Range (-40˚C <T A <+85˚C)NS PackageADC08D1500CIYB 128-Pin Exposed Pad LQFPADC08D1500EVALEvaluation BoardPin Configuration20152101*Exposed pad on back of package must be soldered to ground plane to ensure rated performance.A D C 08D 1500 2Pin Descriptions and Equivalent CircuitsPin FunctionsPin No.Symbol Equivalent Circuit Description3OutV/SCLK Output Voltage Amplitude and Serial Interface Clock.Tie this pin high for normal differential DCLK and data amplitude. Ground this pin for a reduced differential output amplitude and reduced power consumption.See Section1.1.6.When the extended control mode is enabled,this pin functions as the SCLK input which clocks in the serial data.See Section1.2for details on the extended control mode.See Section1.3for description of the serial interface.4OutEdge/DDR/SDATADCLK Edge Select,Double Data Rate Enable and Serial DataInput.This input sets the output edge of DCLK+at which theoutput data transitions.(See Section1.1.5.2).When this pin isfloating or connected to1/2the supply voltage,DDR clockingis enabled.When the extended control mode is enabled,thispin functions as the SDATA input.See Section1.2for detailson the extended control mode.See Section1.3for descriptionof the serial interface.15DCLK_RST DCLK Reset.A positive pulse on this pin is used to reset and synchronize the DCLK outs of multiple converters.See Section1.5for detailed description.26 29PDPDQPower Down Pins.A logic high on the PD pin puts the entiredevice into the Power Down Mode.A logic high on the PDQpin puts only the"Q"ADC into the Power Down mode.30CAL Calibration Cycle Initiate.A minimum80input clock cycles logic low followed by a minimum of80input clock cycles high on this pin initiates the self calibration sequence.See Section2.4.2for an overview of self-calibration and Section2.4.2.2fora description of on-command calibration.14FSR/ECE Full Scale Range Select and Extended Control Enable.In non-extended control mode,a logic low on this pin sets the full-scale differential input range to650mV P-P.A logic high on this pin sets the full-scale differential input range to870mV P-P.See Section1.1.4.To enable the extended control mode,whereby the serial interface and control registers are employed,allow this pin to float or connect it to a voltage equal to V A/2.See Section1.2for information on the extended control mode.127CalDly/DES/SCSCalibration Delay,Dual Edge Sampling and Serial InterfaceChip Select.With a logic high or low on pin14,this pinfunctions as Calibration Delay and sets the number of inputclock cycles after power up before calibration begins(SeeSection1.1.1).With pin14floating,this pin acts as the enablepin for the serial interface input and the CalDly valuebecomes"0"(short delay with no provision for a longpower-up calibration delay).When this pin is floating orconnected to a voltage equal to V A/2,DES(Dual EdgeSampling)mode is selected where the"I"input is sampled attwice the input clock rate and the"Q"input is ignored.SeeSection1.1.5.1.ADC08D15003Pin Descriptions and Equivalent Circuits(Continued)Pin Functions Pin No.SymbolEquivalent CircuitDescription1819CLK+CLK-LVDS Clock input pins for the ADC.The differential clock signal must be a.c.coupled to these pins.The input signal is sampled on the falling edge of CLK+.See Section 1.1.2for a description of acquiring the input and Section 2.3for an overview of the clock inputs.1110.2223V IN I+V IN I−.V IN Q+V IN Q−Analog signal inputs to the ADC.The differential full-scale input range is 650mV P-P when the FSR pin is low,or 870mV P-P when the FSR pin is high.7V CMOCommon Mode Voltage.The voltage output at this pin is required to be the common mode input voltage at V IN +and V IN −when d.c.coupling is used.This pin should be grounded when a.c.coupling is used at the analog inputs.This pin is capable of sourcing or sinking 100µA.See Section 2.2.31V BG Bandgap output voltage capable of 100µA source/sink.126CalRunCalibration Running indication.This pin is at a logic high when calibration is running.32R EXTExternal bias resistor connection.Nominal value is 3.3k-Ohms (±0.1%)to ground.See Section 1.1.1.3435Tdiode_P Tdiode_N Temperature Diode Positive (Anode)and Negative (Cathode)for die temperature measurements.See Section 2.6.2.A D C 08D 1500 4Pin Descriptions and Equivalent Circuits(Continued)Pin FunctionsPin No.Symbol Equivalent Circuit Description83/78 84/77 85/76 86/75 89/72 90/71 91/70 92/69 93/68 94/67 95/66 96/65 100/61 101/60 102/59 103/58DI7−/DQ7−DI7+/DQ7+DI6−/DQ6−DI6+/DQ6+DI5−/DQ5−DI5+/DQ5+DI4−/DQ4−DI4+/DQ4+DI3−/DQ3−DI3+/DQ3+DI2−/DQ2−DI2+/DQ2+DI1−/DQ1−DI1+/DQ1+DI0−/DQ0−DI0+/DQ0+I and Q channel LVDS Data Outputs that are not delayed inthe output pared with the DId and DQdoutputs,these outputs represent the later time samples.These outputs should always be terminated with a100Ωdifferential resistor.104/57 105/56 106/55 107/54 111/50 112/49 113/48 114/47 115/46 116/45 117/44 118/43 122/39 123/38 124/37 125/36DId7−/DQd7−DId7+/DQd7+DId6−/DQd6−DId6+/DQd6+DId5−/DQd5−DId5+/DQd5+DId4−/DQd4−DId4+/DQd4+DId3−/DQd3−DId3+/DQd3+DId2−/DQd2−DId2+/DQd2+DId1−/DQd1−DId1+/DQd1+DId0−/DQd0−DId0+/DQd0+I and Q channel LVDS Data Outputs that are delayed by oneCLK cycle in the output pared with theDI/DQ outputs,these outputs represent the earlier timesample.These outputs should always be terminated with a100Ωdifferential resistor.79 80OR+OR-Out Of Range output.A differential high at these pinsindicates that the differential input is out of range(outside therange±325mV or±435mV as defined by the FSR pin).82 81DCLK+DCLK-Differential Clock outputs used to latch the output data.Delayed and non-delayed data outputs are suppliedsynchronous to this signal.This signal is at1/2the input clockrate in SDR mode and at1/4the input clock rate in the DDRmode.2,5,8, 13,16,17,20, 25,28, 33,128V A Analog power supply pins.Bypass these pins to ground.ADC08D15005Pin Descriptions and Equivalent Circuits(Continued)Pin Functions Pin No.SymbolEquivalent CircuitDescription40,51,62,73,88,99,110,121V DROutput Driver power supply pins.Bypass these pins to DR GND.1,6,9,12,21,24,27,41GNDGround return for V A .42,53,64,74,87,97,108,119DR GNDGround return for V DR .52,63,98,109,120NC No Connection.Make no connection to these pins.A D C 08D 1500 6Absolute Maximum Ratings(Notes1,2)If Military/Aerospace specified devices are required, please contact the National Semiconductor Sales Office/ Distributors for availability and specifications.Supply Voltage(V A,V DR) 2.2V Voltage on Any Input Pin−0.15V to(V A+0.15V) Ground Difference|GND-DR GND|0V to100mV Input Current at Any Pin(Note3)±25mA Package Input Current(Note3)±50mA Power Dissipation at T A≤85˚C 2.0W ESD Susceptibility(Note4)Human Body Model Machine Model 2500V 250VSoldering Temperature,Infrared,10seconds,(Note5),(Appliesto standard plated package only)235˚C Storage Temperature−65˚C to+150˚C Operating Ratings(Notes1,2)Ambient Temperature Range−40˚C≤T A≤+85˚C Supply Voltage(V A)+1.8V to+2.0V Driver Supply Voltage(V DR)+1.8V to V A Analog Input Common ModeVoltage V CMO±50mV V IN+,V IN-Voltage Range(Maintaining Common Mode)200mV to V A Ground Difference(|GND-DR GND|)0V CLK Pins Voltage Range0V to V A Differential CLK Amplitude0.4V P-P to2.0V P-PPackage Thermal ResistancePackageθJAθJC(Top ofPackage)θJ-PAD(ThermalPad) 128-LeadExposed PadLQFP26˚C/W10˚C/W 2.8˚C/WConverter Electrical CharacteristicsNOTE:This product is currently in development and the parameters specified in this section are DESIGN TARGETS. The specifications in this section cannot be guaranteed until device characterization has taken place.The following specifications apply after calibration for V A=V DR=+1.9V DC,OutV=1.9V,V IN FSR(a.c.coupled)=differential870mV P-P,C L =10pF,Differential,a.c.coupled Sinewave Input Clock,f CLK=1.5GHz at0.5V P-P with50%duty cycle,V BG=Floating,Non-Extended Control Mode,SDR Mode,R EXT=3300Ω±0.1%,Analog Signal Source Impedance=100ΩDifferential.Boldface limits apply for T A=T MIN to T MAX.All other limits T A=25˚C,unless otherwise noted.(Notes6,7)Symbol Parameter Conditions Typical(Note8)Limits(Note8)Units(Limits)STATIC CONVERTER CHARACTERISTICSINL Integral Non-Linearity(Best fit)DC Coupled,1MHz Sine WaveOveranged±0.3±TBD LSB(max)DNL Differential Non-Linearity DC Coupled,1MHz Sine WaveOveranged±0.15±TBD LSB(max)Resolution with No MissingCodes8BitsV OFF Offset Error-0.45−TBDTBDLSB(min)LSB(max)V OFF_ADJ Input Offset Adjustment Range Extended Control Mode±45mVPFSE Positive Full-Scale Error(Note9)−0.6±TBD mV(max)NFSE Negative Full-Scale Error(Note9)−1.31±TBD mV(max)FS_ADJ Full-Scale Adjustment Range Extended Control Mode±20±15%FS NORMAL MODE(Non DES)DYNAMIC CONVERTER CHARACTERISTICSFPBW Full Power Bandwidth Normal Mode(non DES) 1.7GHz B.E.R.Bit Error Rate10-18Error/SampleGain Flatness d.c.to500MHz±0.5dBFS d.c.to1GHz±1.0dBFSENOB Effective Number of Bits f IN=248MHz,V IN=FSR−0.5dB7.4TBD Bits(min)f IN=498MHz,V IN=FSR−0.5dB7.4TBD Bits(min)f IN=748MHz,V IN=FSR−0.5dB7.25TBD Bits(min)ADC08D1500 7Converter Electrical Characteristics(Continued)NOTE:This product is currently in development and the parameters specified in this section are DESIGN TARGETS.The specifications in this section cannot be guaranteed until device characterization has taken place.The following specifications apply after calibration for V A =V DR =+1.9V DC ,OutV =1.9V,V IN FSR (a.c.coupled)=differential 870mV P-P ,C L =10pF,Differential,a.c.coupled Sinewave Input Clock,f CLK =1.5GHz at 0.5V P-P with 50%duty cycle,V BG =Floating,Non-Extended Control Mode,SDR Mode,R EXT =3300Ω±0.1%,Analog Signal Source Impedance =100ΩDifferential.Boldface limits apply for T A =T MIN to T MAX .All other limits T A =25˚C,unless otherwise noted.(Notes 6,7)SymbolParameterConditionsTypical (Note 8)Limits (Note 8)Units (Limits)NORMAL MODE (Non DES)DYNAMIC CONVERTER CHARACTERISTICS SINADSignal-to-Noise Plus Distortion Ratiof IN =248MHz,V IN =FSR −0.5dB 46.3TBD dB (min)f IN =498MHz,V IN =FSR −0.5dB 46.3TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB 45.4TBD dB (min)SNRSignal-to-Noise Ratiof IN =248MHz,V IN =FSR −0.5dB47.1TBD dB (min)f IN =498MHz,V IN =FSR −0.5dB 47.1TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB 46.3TBD dB (min)THDTotal Harmonic Distortionf IN =248MHz,V IN =FSR −0.5dB-55-TBD dB (max)f IN =498MHz,V IN =FSR −0.5dB -55-TBD dB (max)f IN =748MHz,V IN =FSR −0.5dB -53-TBDdB (max)2nd HarmSecond Harmonic Distortionf IN =248MHz,V IN =FSR −0.5dB−60dB f IN =498MHz,V IN =FSR −0.5dB −60dB f IN =748MHz,V IN =FSR −0.5dB −60dB 3rd HarmThird Harmonic Distortionf IN =248MHz,V IN =FSR −0.5dB−65dB f IN =498MHz,V IN =FSR −0.5dB −65dB f IN =748MHz,V IN =FSR −0.5dB −65dB SFDRSpurious-Free dynamic Rangef IN =248MHz,V IN =FSR −0.5dB55TBD dB (min)f IN =498MHz,V IN =FSR −0.5dB 55TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB53TBD dB (min)IMDIntermodulation Distortion f IN1=321MHz,V IN =FSR −7dB f IN2=326MHz,V IN =FSR −7dB -50dBOut of Range Output Code (In addition to OR Output high)(V IN +)−(V IN −)>+Full Scale 255(V IN +)−(V IN −)<−Full Scale0INTERLEAVE MODE (DES Pin 127=Float)-DYNAMIC CONVERTER CHARACTERISTICSFPBW (DES)Full Power Bandwidth Dual Edge Sampling Mode 900MHz ENOB Effective Number of Bits f IN =498MHz,V IN =FSR −0.5dB 7.3TBD Bits (min)f IN =748MHz,V IN =FSR −0.5dB 7.2TBD Bits (min)SINAD Signal to Noise Plus Distortion Ratiof IN =498MHz,V IN =FSR −0.5dB 46TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB 45TBD dB (min)SNR Signal to Noise Ratio f IN =498MHz,V IN =FSR −0.5dB 46.4TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB 45.4TBD dB (min)THD Total Harmonic Distortion f IN =498MHz,V IN =FSR −0.5dB -58-TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB -57-TBDdB (min)2nd Harm Second Harmonic Distortion f IN =498MHz,V IN =FSR −0.5dB -64dB f IN =748MHz,V IN =FSR −0.5dB -62dB 3rd Harm Third Harmonic Distortion f IN =498MHz,V IN =FSR −0.5dB -69dB f IN =748MHz,V IN =FSR −0.5dB -69dB SFDRSpurious Free Dynamic Rangef IN =498MHz,V IN =FSR −0.5dB 57TBD dB (min)f IN =748MHz,V IN =FSR −0.5dB57TBD dB (min)A D C 08D 1500 8Converter Electrical Characteristics(Continued)NOTE:This product is currently in development and the parameters specified in this section are DESIGN TARGETS. The specifications in this section cannot be guaranteed until device characterization has taken place.The following specifications apply after calibration for V A=V DR=+1.9V DC,OutV=1.9V,V IN FSR(a.c.coupled)=differential870mV P-P,C L =10pF,Differential,a.c.coupled Sinewave Input Clock,f CLK=1.5GHz at0.5V P-P with50%duty cycle,V BG=Floating,Non-Extended Control Mode,SDR Mode,R EXT=3300Ω±0.1%,Analog Signal Source Impedance=100ΩDifferential.Boldface limits apply for T A=T MIN to T MAX.All other limits T A=25˚C,unless otherwise noted.(Notes6,7)Symbol Parameter Conditions Typical(Note8)Limits(Note8)Units(Limits)ANALOG INPUT AND REFERENCE CHARACTERISTICSV IN Full Scale Analog DifferentialInput RangeFSR pin14Low650570mV P-P(min)730mV P-P(max)FSR pin14High870790mV P-P(min)950mV P-P(max)V CMI Analog Input Common ModeVoltageV CMOV CMO−50V CMO+50mV(min)mV(max)C IN Analog Input Capacitance,Normal operation(Notes10,11)Differential0.02pFEach input pin to ground 1.6pF Analog Input Capacitance,DESMode(Notes10,11)Differential0.08pFEach input pin to ground 2.2pFR IN Differential Input Resistance10094Ω(min) 106Ω(max)ANALOG OUTPUT CHARACTERISTICSV CMO Common Mode Output Voltage 1.260.951.45V(min)V(max)V CMO_LVL V CMO input threshold to set DCCoupling modeV A=1.8V0.60VV A=2.0V0.66VTC V CMO Common Mode Output VoltageTemperature CoefficientT A=−40˚C to+85˚C118ppm/˚CC LOAD V CMO Maximum V CMO loadCapacitance80pFV BG Bandgap Reference OutputVoltageI BG=±100µA 1.261.201.33V(min)V(max)TC V BG Bandgap Reference VoltageTemperature CoefficientT A=−40˚C to+85˚C,I BG=±100µA28ppm/˚CC LOAD V BG Maximum Bandgap Referenceload Capacitance80pFTEMPERATURE DIODE CHARACTERISTICS∆V BE Temperature Diode Voltage 192µA vs.12µA,T J=25˚C71.23mV 192µA vs.12µA,T J=85˚C85.54mVCHANNEL-TO-CHANNEL CHARACTERISTICSOffset Match1LSBPositive Full-Scale Match Zero offset selected in ControlRegister1LSBNegative Full-Scale Match Zero offset selected in ControlRegister1LSBPhase Matching(I,Q)F IN=1.0GHz<1DegreeX-TALK Crosstalk from I(Agressor)to Q(Victim)ChannelAggressor=867MHz F.S.Victim=100MHz F.S.-71dBX-TALK Crosstalk from Q(Agressor)to I(Victim)ChannelAggressor=867MHz F.S.Victim=100MHz F.S.-71dBADC08D15009Converter Electrical Characteristics(Continued)NOTE:This product is currently in development and the parameters specified in this section are DESIGN TARGETS.The specifications in this section cannot be guaranteed until device characterization has taken place.The following specifications apply after calibration for V A =V DR =+1.9V DC ,OutV =1.9V,V IN FSR (a.c.coupled)=differential 870mV P-P ,C L =10pF,Differential,a.c.coupled Sinewave Input Clock,f CLK =1.5GHz at 0.5V P-P with 50%duty cycle,V BG =Floating,Non-Extended Control Mode,SDR Mode,R EXT =3300Ω±0.1%,Analog Signal Source Impedance =100ΩDifferential.Boldface limits apply for T A =T MIN to T MAX .All other limits T A =25˚C,unless otherwise noted.(Notes 6,7)SymbolParameterConditionsTypical (Note 8)Limits (Note 8)Units (Limits)CLOCK INPUT CHARACTERISTICSV IDDifferential Clock Input LevelSine Wave Clock0.60.42.0V P-P (min)V P-P (max)Square Wave Clock0.60.42.0V P-P (min)V P-P (max)I I Input CurrentV IN =0or V IN =V A ±1µA C INInput Capacitance (Notes 10,11)Differential0.02pF Each input to ground 1.5pFDIGITAL CONTROL PIN CHARACTERISTICS V IH Logic High Input Voltage (Note 12)0.85x V A V (min)V IL Logic Low Input Voltage (Note 12)0.15x V AV (max)C INInput Capacitance (Notes 11,13)Each input to ground1.2pFDIGITAL OUTPUT CHARACTERISTICSV ODLVDS Differential Output VoltageMeasured differentially,OutV =V A ,V BG =Floating (Note 15)710400mV P-P (min)920mV P-P (max)Measured differentially,OutV =GND,V BG =Floating (Note 15)510280mV P-P (min)720mV P-P (max)∆V O DIFF Change in LVDS Output Swing Between Logic Levels ±1mV V OS Output Offset Voltage,see Figure 1V BG =Floating 800mV V OS Output Offset Voltage,see Figure 1V BG =V A (Note 15)1200mV ∆V OS Output Offset Voltage Change Between Logic Levels ±1mV I OS Output Short Circuit Current Output+&Output-connected to 0.8V±4mA Z O Differential Output Impedance 100OhmsV OH CalRun H level output I OH =-400uA (Note 12) 1.65 1.5V V OLCalRun L level outputI OH =400uA (Note 12)0.150.3V POWER SUPPLY CHARACTERISTICS I AAnalog Supply CurrentPD =PDQ =LowPD =Low,PDQ =High PD =PDQ =High 6604301.8TBD TBD mA (max)mA (max)mA I DROutput Driver Supply CurrentPD =PDQ =LowPD =Low,PDQ =High PD =PDQ =High 2001120.012TBD TBD mA (max)mA (max)mA P DPower Consumption PD =PDQ =LowPD =Low,PDQ =High PD =PDQ =High1.91.23.5TBD TBDW (max)W (max)mW PSRR1 D.C.Power Supply Rejection RatioChange in Full Scale Error with change in V A from 1.8V to 2.0V 30dB PSRR2A.C.Power Supply Rejection Ratio248MHz,50mV P-P riding on V A 51dBA D C 08D 1500 10Converter Electrical Characteristics(Continued)NOTE:This product is currently in development and the parameters specified in this section are DESIGN TARGETS. The specifications in this section cannot be guaranteed until device characterization has taken place.The following specifications apply after calibration for V A=V DR=+1.9V DC,OutV=1.9V,V IN FSR(a.c.coupled)=differential870mV P-P,C L =10pF,Differential,a.c.coupled Sinewave Input Clock,f CLK=1.5GHz at0.5V P-P with50%duty cycle,V BG=Floating,Non-Extended Control Mode,SDR Mode,R EXT=3300Ω±0.1%,Analog Signal Source Impedance=100ΩDifferential.Boldface limits apply for T A=T MIN to T MAX.All other limits T A=25˚C,unless otherwise noted.(Notes6,7)Symbol Parameter Conditions Typical(Note8)Limits(Note8)Units(Limits)AC ELECTRICAL CHARACTERISTICSf CLK1Maximum Input ClockFrequencyNormal Mode(non DES)or DESMode1.7 1.5GHz(min)f CLK2Minimum Input ClockFrequencyNormal Mode(non DES)200MHzf CLK2Minimum Input ClockFrequencyDES Mode500MHz Input Clock Duty Cycle200MHz≤Input clock frequency≤1.5GHz(Normal Mode)(Note12)502080%(min)%(max) Input Clock Duty Cycle500MHz≤Input clock frequency≤1.5GHz(DES Mode)(Note12)502080%(min)%(max)t CL Input Clock Low Time(Note11)333133ps(min) t CH Input Clock High Time(Note11)333133ps(min)DCLK Duty Cycle(Note11)504555%(min)%(max)t RS Reset Setup Time(Note11)150ps t RH Reset Hold Time(Note11)250pst SD Syncronizing Edge to DCLKOutput Delayf CLKIN=1.5GHzf CLKIN=200MHz3.533.85nst RPW Reset Pulse Width(Note11)4Clock Cycles(min)t LHT Differential Low to HighTransition Time10%to90%,C L=2.5pF250pst HLT Differential High to LowTransition Time10%to90%,C L=2.5pF250pst OSK DCLK to Data Output Skew 50%of DCLK transition to50%ofData transition,SDR Modeand DDR Mode,0˚DCLK(Note11)±50ps(max)t SU Data to DCLK Set-Up Time DDR Mode,90˚DCLK(Note11)667ps t H DCLK to Data Hold Time DDR Mode,90˚DCLK(Note11)667pst AD Sampling(Aperture)Delay Input CLK+Fall to Acquisition ofData1.3nst AJ Aperture Jitter0.4ps rmst OD Input Clock to Data OutputDelay(in addition to PipelineDelay)50%of Input Clock transition to50%of Data transition3.1nsPipeline Delay(Latency)(Notes11,14)DI Outputs13Input ClockCyclesDId Outputs14DQ OutputsNormal Mode13DES Mode13.5DQd OutputsNormal Mode14DES Mode14.5Over Range Recovery TimeDifferential V IN step from±1.2V to0V to get accurate conversion1Input ClockCycleADC08D1500Converter Electrical Characteristics(Continued)NOTE:This product is currently in development and the parameters specified in this section are DESIGN TARGETS.The specifications in this section cannot be guaranteed until device characterization has taken place.The following specifications apply after calibration for V A =V DR =+1.9V DC ,OutV =1.9V,V IN FSR (a.c.coupled)=differential 870mV P-P ,C L =10pF,Differential,a.c.coupled Sinewave Input Clock,f CLK =1.5GHz at 0.5V P-P with 50%duty cycle,V BG =Floating,Non-Extended Control Mode,SDR Mode,R EXT =3300Ω±0.1%,Analog Signal Source Impedance =100ΩDifferential.Boldface limits apply for T A =T MIN to T MAX .All other limits T A =25˚C,unless otherwise noted.(Notes 6,7)SymbolParameterConditionsTypical (Note 8)Limits (Note 8)Units (Limits)AC ELECTRICAL CHARACTERISTICS t WU PD low to Rated Accuracy Conversion (Wake-Up Time)500ns f SCLK Serial Clock Frequency (Note 11)100MHz t SSU Data to Serial Clock Setup Time(Note 11) 2.5ns (min)t SHData to Serial Clock Hold Time (Note 11)1ns (min)Serial Clock Low Time 4ns (min)Serial Clock High Time4ns (min)t CAL Calibration Cycle Time 1.4x 105Clock Cycles t CAL_L CAL Pin Low Time See Figure 9(Note 11)80Clock Cycles(min)t CAL_H CAL Pin High TimeSee Figure 9(Note 11)80Clock Cycles(min)t CalDly Calibration delay determined by pin 127See Section 1.1.1,Figure 9,(Note 11)225Clock Cycles(min)t CalDlyCalibration delay determined by pin 127See Section 1.1.1,Figure 9,(Note 11)231Clock Cycles(max)Note 1:Absolute Maximum Ratings indicate limits beyond which damage to the device may occur.There is no guarantee of operation at the Absolute Maximum Ratings.Operating Ratings indicate conditions for which the device is functional,but do not guarantee specific performance limits.For guaranteed specifications and test conditions,see the Electrical Characteristics.The guaranteed specifications apply only for the test conditions listed.Some performance characteristics may degrade when the device is not operated under the listed test conditions.Note 2:All voltages are measured with respect to GND =DR GND =0V,unless otherwise specified.Note 3:When the input voltage at any pin exceeds the power supply limits (that is,less than GND or greater than V A ),the current at that pin should be limited to 25mA.The 50mA maximum package input current rating limits the number of pins that can safely exceed the power supplies with an input current of 25mA to two.This limit is not placed upon the power,ground and digital output pins.Note 4:Human body model is 100pF capacitor discharged through a 1.5k Ωresistor.Machine model is 220pF discharged through ZERO Ohms.Note 5:See AN-450,“Surface Mounting Methods and Their Effect on Product Reliability”.Note 6:The analog inputs are protected as shown below.Input voltage magnitudes beyond the Absolute Maximum Ratings may damage this device.20152104Note 7:To guarantee accuracy,it is required that V A and V DR be well bypassed.Each supply pin must be decoupled with separate bypass capacitors.Additionally,achieving rated performance requires that the backside exposed pad be well grounded.Note 8:Typical figures are at T A =25˚C,and represent most likely parametric norms.Test limits are guaranteed to National’s AOQL (Average Outgoing Quality Level).Note 9:Calculation of Full-Scale Error for this device assumes that the actual reference voltage is exactly its nominal value.Full-Scale Error for this device,therefore,is a combination of Full-Scale Error and Reference Voltage Error.See Figure 2.For relationship between Gain Error and Full-Scale Error,see Specification Definitions for Gain Error.Note 10:The analog and clock input capacitances are die capacitances only.Additional package capacitances of 0.65pF differential and 0.95pF each pin to ground are isolated from the die capacitances by lead and bond wire inductances.Note 11:This parameter is guaranteed by design and is not tested in production.Note 12:This parameter is guaranteed by design and/or characterization and is not tested in production.A D C 08D 1500。
ad0808 转换程序以及原理图

ADC 转换程序显示U —P00P01P02P03P04P05P06P07P20P21P22P24P25P26P27P10P11P12P13P14P15P17P16P30P31P32P33P34P35P36P37D0D1D2D3D4D5D6D7P 10P 11P 12P 13P 14P 15P 17P 37P 36P 35P 34P 33P 32P 31P 30P23P 16P10P11P12P13P14P15P16P17P10P11P12P13P14P15P16P17A7A6A5A4A3A2A1A0D7D6D5D4D3D2D1D0P30P31P32P33P 34P 35P 36P 37P 00P 01P 02P 03P 04P 05P 06P 07P 32P 31P 30A0A1A2A3A4A5A6A7P26P26P27P27P 00P 01P 02P 03P 04P 05P 06P 07P 20P 21P 22P 23P 24P 25XTAL218XTAL119ALE 30EA31PSEN 29RST9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435P0.5/AD534P0.6/AD633P0.7/AD732P1.0/T21P1.1/T2EX 2P1.23P1.34P1.45P1.56P1.67P1.78P3.0/RXD 10P3.1/TXD 11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115P2.7/A1528P2.0/A821P2.1/A922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427U1AT89C52234567891RP1RESPACK-8R2200R3200R4200R5200R6200R7200R8200R9200D2LED-REDD3LED-REDD4LED-REDD5LED-REDD6LED-REDD7LED-REDD8LED-REDD9LED-REDOFFON12345678161514131211109DSW1DIPSW_8OFFON12345678161514131211109DSW2DIPSW_812365489=7+CONABCD1243D 714D 613D 512D 411D 310D 29D 18D 07E6R W 5R S 4V S S 1V D D 2V E E3LCD1LM016LOUT121ADD B 24ADD A 25ADD C 23VREF(+)12VREF(-)16IN31IN42IN53IN64IN75START 6OUT58EOC 7OE9CLOCK 10OUT220OUT714OUT615OUT817OUT418OUT319IN228IN127IN026ALE 22U2ADC080897%RV110k BUZ1BUZZERQ1NPNR11k55%RV21kU 2(C L O C K )//***********************************************************// //ADC 模数转换电压表 ////作者:张武林// //时间:2012/08/11////***********************************************************///***********************************************************/ //调用库、宏定义端口///***********************************************************/#include<> #include <>#define uint unsigned int #define uchar unsigned char #define DATA P0 #define ADC P1 //sbit CLOCK=P3^0; sbit START=P3^0; sbit OE=P3^1;/***********************************************************//***********************************************************///定义变量和数组///***********************************************************/ uchar dispcount,adc;int Uo,ge,shi,bai,qian,s;uchar code Dispduan[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00};uchar Dispwei[]={0,0,0,0,0,0};/***********************************************************//***********************************************************///延时子程序///***********************************************************/ void delay(uint z){uint x,y;for(x=100;x>0;x--)for(y=z;y>0;y--) ;}/***********************************************************//***********************************************************///中断初始化///***********************************************************/ void intrrupt_init(){EA=1;TR0=1;ET0=1;TMOD=0x01;TH0=0xf0;TL0=0x60;dispcount=0;EOC=1;}/***********************************************************//***********************************************************///写入数码管位码子程序// /***********************************************************/ void wei_to_disp(){Dispwei[0]=16;Dispwei[1]=16;Dispwei[2]=qian;Dispwei[3]=bai;Dispwei[4]=shi;Dispwei[5]=ge;}/***********************************************************//***********************************************************/ //读adc数据子程序// /***********************************************************/ void read_adc_tomcu(){START=0;delay(1);START=1; //启动addelay(1);OE=1; //转换完读取数据delay(1);adc=ADC;OE=0;delay(1);}/***********************************************************//***********************************************************/ //转换显示子程序// /***********************************************************/ void adc_zhuanhuan(){Uo=100*adc;Uo=Uo/255;Uo=Uo*50;qian=Uo/1000;bai=Uo/100%10;shi=Uo/10%10;ge =Uo%10;}/***********************************************************//***********************************************************/ //主程序// /***********************************************************/void main(){intrrupt_init();while(1){read_adc_tomcu();adc_zhuanhuan();wei_to_disp();};}/***********************************************************//***********************************************************///定时器0子程序///***********************************************************/void time0() interrupt 1{TH0=0xf0;TL0=0x60;dispcount++;if(dispcount==6)dispcount=0;switch(dispcount){case 0:{P2=0xfe;DATA=0x3e;break;}case 1:{P2=0xfd;DATA=0x40;break;}case 2:{P2=0xfb;DATA=Dispduan[Dispwei[dispcount]];DATA|=0X80;break;}case 3:{P2=0xf7;DATA=Dispduan[Dispwei[dispcount]];break;}case 4:{P2=0xef;DATA=Dispduan[Dispwei[dispcount]];break;}case 5:{P2=0xdf;DATA=Dispduan[Dispwei[dispcount]];break;}}}/***********************************************************/。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DMARD08 ±3g Tri-Axial Digital AccelerometerGeneral DescriptionDMARD08 is a ±3g tri-axial digital accelerometer embedded with 11-bit ADC and in small 3×3×1 mm 3 form-factor. DMARD08 contains in a compact plastic LGA package a sensing element and a conditioning CMOS IC. The sensing element is a MEMS device by proprietary piezoresistive technology. The CMOS IC provides SPI and I2C digital interface and interrupt signals with build-in functionality. DMARD08 can be deployed without further user interference in many applications .FeaturesTri-axial digital accelerometer with ±3g dynamic range11 bit ADC embedded with SPI (4-wire) and I2C digital interfaceTemperature sensor for internal compensation and capable of digital output Low operation voltage of +2.4V ~ +3.6V with minimum interface voltage of +1.7V Low power consumption (Operation: typical 250uA@3V, Stand-by: Max. 5uA) Two interrupt pins configurable from three interrupt sources: freefall, click and high-G Freefall detection with user settable threshold 6-direction click detection with user settable threshold3-direction motion detection (high-G) with configurable logic combination and threshold setting User selectable bandwidth and pin-controllable standby mode5000g shock tolerance16-pin LGA package with RoHS compliance and lead-free. Footprint 3mm×3mm, height 1mm .ApplicationsDisplay orientation switching, click sensing, menu scrolling, HDD protection, mobile phone, gaming, smart toys, etc.Bottom ViewTop View12348765151614131211109Figure 1: DMARD08SpecificationsTable 1: Pin DescriptionsPin Name Description Pin Name Description1 Reserved Reserved 9 SCL Serial interface clock2 VDD Analog power 10 SDO Serial data interface3 GND Ground 11 SDI Serial data interface4 INT1 Interrupt signal 1 12 DVCC Digital power5 CS Serial interface mode select 13 CE Control of chip enable6 NC No connection inside 14 NC No connection inside7 NC No connection inside 15 INT2 Interrupt signal 28 NC No connection inside 16 NC No connection insideTable 2: General SpecificationParameter Conditions Min. Typ. Max. Unit Operating Voltage V op(VDD)T a = -40°C ~ +85°C 2.4 3.0 3.6 V Interface Voltage DVCC T a = -40°C ~ +85°C 1.7 — 3.6 V Operating current I op V op = 3V, T a = 25°C — 250 400 uA Standby current I stby V op = 3V, T a = 25°C — 3 5 uA Dynamic range —±3 — g Sensitivity V op = 3V, T a = 25°C 230 256 280 LSB/g Zero-g offset V op = 3V, Ta = 25°C — ±120 — LSB Sensitivity to temp. dependency T a = -40°C ~ +85°C — ±0.08 — %/°C Zero-g offset temp. dependency T a = -40°C ~ +85°C — ±2 — mg/°C Nonlinearity — ±2 — %FS Cross axis sensitivity — 2 — % Turn on time N: average order T ms × N msNoise BW=100Hz — 11 — mg rmsOperation temperature T a-40 — +85 °C Storage temperature range -40 — +125 °C Internal sampling period T ms User selectable 1.462, 2.925 ms Internal sampling rate 1/T ms User selectable 342, 684 HzDetection response time User selectable T ms msMechanical DC 100 — Hz BandwidthElectrical See Bandwidth Table 8 HzDefault — 523 — mg Freefall thresholdSettable @ 7.8mg step 7.8 — 996 mgDefault — 2.0 — g Click thresholdSettable @ 250mg step 0.25 — 3.0 g Temperature sensor sensitivity V op = 3V — 16 — LSB/°C Temperature sensor accuracy T a = -40°C ~ +85°C — ±3 — °C Digital interface I2C and SPI (4-wire)I2C clock frequency — — 400 kHz Low level input voltage CS, CE, SCL, SDI, SDO -0.3 — 0.2×V if V High level input voltage CS, CE, SCL, SDI, SDO 0.8×V if— V if+0.3 V Low level output voltage INT, SDI, SDO — — 0.1×V if V High level output voltage INT, SDI, SDO 0.9×V if— — V Maximum RatingsTable 3: Absolute Maximum RatingParameter RatingV op-GND -0.3 ~ 4 VAny other pin voltage GND-0.3 to V op+0.3 VTemperature Range (Storage) −40°C to +125°CESD 2000V (HBM)Acceleration (Any Axis, unpowered) 5,000 gFreefall on concrete surface 1 mNote: Stress above the absolute maximum rating as listed in Table 3 may cause permanent damage to the deviceConnection DiagramFigure 3: I2C Connection ExampleFigure 4: SPI Connection ExampleEnd users can read sensor outputs, control sensor behaviors and query the interrupt status by accessing the user registers. DMARD08 provides two digital interfaces, i.e. SPI 4-wire and I2C, for easy accessing these registers. The registers primarily consist of three categories: data, control and interrupt status registers. Sensor output values can be read from the data registers. The sensor behavior can be configured by setting up respective control registers. And lastly when using the build-in interrupt functions, the interrupt status registers bear state bits detailing interrupt event.User Register MapTable 4: User Register Map TableRegister Address bit7 bit6 bit5 bit4 bit3 bit2 bit1 bit0 TypeDefaultValue00h Tout[10:3] Read NA 01h Not used Tout[2:0] Read NA 02h Xout[10:3] Read NA 03h Not used Xout[2:0] Read NA 04h Yout[10:3] Read NA 05h Not used Yout[2:0] Read NA 06h Zout[10:3] Read NA 07h Not used Zout[2:0] Read NA08h I2CFG[1:0] I1CFG[1:0] HGL Tms N[1:0] Read/Write 00h09h HGAO HGXEn HGYEn HGZEnNotusedCLXEn CLYEn CLZEn Read/Write 00h0Ah HGth[3:0] FFth[3:0] Read/Write 88h 0Bh Not used Clickth[3:0] Read/Write 08h0Ch FFInt HGInt XHGP XHGN YHGP YHGN ZHGP ZHGN Read NA0DhNotusedCLInt XCLP XCLN YCLP YCLN ZCLP ZCLN Read NANote: SPI register address is 13-bit wide while I2C register address is 8-bit wide. For the same register, taking address 04h as an example, SPI address should be set as 0000000000100b, and I2C address should be set as 00000100b.Temperature and acceleration output values can be read from the data registers. The sensor output is converted to an 11-bit value and stored across two register bytes. Data representation is 2's complement, i.e. MSB 1 means negative values. Data is periodically updated with sampling period which is user-settable, and data registers will keep their values intact when digital interface (SPI or I2C) is accessed. In addition the data can be pre-processed by digital moving average filter for bandwidth control. Please refer to "Control Registers" for more details on the sampling period and bandwidth control.A thermometer is embedded in DMARD08. Its temperature sensitivity is 16 LSB/°C and the central value (0h) stands for 25°C. For example a Tout[10:0] reading of 80h means 25+80h/16=33°C. The acceleration sensitivity is 256 LSB/g and the central value (0h) stands for 0g. For example a Xout[10:0] reading of 100h means 100h/256=1g.Following lists the summary of sensor output and data registers:1. Tout[10:0]: 11-bit temperature output, register 00h:bit7~0 + 01h:bit2~02. Xout[10:0]: 11-bit X-axis output, register 02h:bit7~0 + 03h:bit2~03. Yout[10:0]: 11-bit Y-axis output, register 04h:bit7~0 + 05h:bit2~04. Zout[10:0]: 11-bit Z-axis output, register 06h:bit7~0 + 07h:bit2~0Control RegistersINT1 and INT2 Source ConfigureI1CFG[1:0] (08h:bit5, 4) and I2CFG[1:0] (08h:bit7, 6) are interrupt pins (INT×, ×=1, 2) source configuration bits respectively. DMARD08 has two interrupt pins configurable from three interrupt sources of freefall, click and high-G. Each interrupt INT× has two bits to configure its output from any of the three interrupt sources, or alternatively turn it off by grounding. The INTx source configuration table can be found in Table 5.Table 5: INTx Pin Source Configuration TableIxCFG[1] x=1, 08h:bit5 x=2, 08h:bit7IxCFG[0]x=1, 08h:bit4x=2, 08h:bit6INTx Source0 0 GND0 1 Freefall1 0 Click1 1 High-GNote: x=1, 2Freefall Interrupt EnableIxCFG[1:0] has a side effect on the freefall interrupt enable control. If either pin of INTx is configured to source its output from freefall, i.e. IxCFG[1:0] = 01b, the freefall interrupt is automaticallyenabled. When the freefall interrupt is enabled, DMARD08 will watch closely the acceleration values of all three axes as compared to some threshold. The INTx pin will directly reflect the comparison result, in other words the result is not latched. The INTx pin will be logic-1 if all three acceleration magnitudes are below the designated threshold value, which potentially indicates a freefall in process. On the other hand, the INTx pin will be logic-0 if any of three acceleration magnitudes rises above the threshold. The freefall interrupt flag (FFInt, 0Ch:bit7) serves the same purpose and manner as the INTx pin. This flag can be read via the SPI/I2C digital interface, and therefore is an alternative to the INTx pin if end users have GPIO constraint. See "Interrupt Status Registers" for details. User can set freefall threshold, see "Freefall Threshold" for details.High-G Latch ControlHGL (08h:bit3) is the high-G latch control. Under some circumstances the high-G detection event may need to be latched. Logic-1 HGL will cause the high-G detection results latched. See “High-G Detection” for details on high-G detection.BandwidthTms (08h:bit2) is used to setup the internal ADC sampling period, together with N[1:0] (08h:bit1, 0), which is to setup the digital filtering of ADC output data, to obtain the desired bandwidth. Digital filters can be selectively activated to reduce the bandwidth to as low as 20 Hz. A moving average filter of various lengths is implemented as the digital filter. Please see T able 6 for the sampling period and frequency settable by Tms, and Table 7 for the moving average length settable by N[1:0]. Bandwidth table can be found in Table 8.Table 6: Sampling Period TableTms (08h: bit2)Sampling Period(ms)Sampling Frequency(Hz)0 2.925 3421 1.462 684 Table 7: Moving Average Length TableN[1] (08h: bit1)N[0](08h: bit0)Average Order0 0 80 1 41 02 1 1 1Table 8: Bandwidth TableN[1:0] (08h:bit1, 0)Hz00011011Tms019 38 76No Filter(08h: bit2)138 76 153High-G DetectionHGXEn, HGYEn, HGZEn (09h:bit6, 5, 4) are the X-, Y-, and Z-axis high-G interrupt enable control bits respectively. If the respective high-G interrupt enable bit is set to 1, high-G monitoring is enabled for the respective axis. Upon enabled, DMARD08 will check closely if the acceleration magnitude of the respective axis exceeds some high-G threshold value. Furthermore the HGAO (09h:bit7) serves as the logical combination control bit for multiple axial detections. Logic-1 HGAO will do “logic-AND” of enabled multiple axial detections before output to the configured interrupt pin INT×. On the contrary, logic-0 HGAO will do “logic-OR” of enabled multiple axial detections before output to the configured interrupt pin INT×. Logic-1 INT× stands for high-G event detection and logic-0 otherwise. The INTx pin will directly reflect the detection result, in other words the result is not latched. The high-G interrupt flag (HGInt, 0Ch:bit6) serves the same purpose and manner as the INTx pin. This flag can be read via the SPI/I2C digital interface, and therefore is an alternative to the INTx pin if end users have GPIO constraint.In the case when the enabled multiple axial detections are logic-OR’ed (HGAO is logic-0), we may want to further identify which axis and direction cause the high-G detection. This can be achieved by first latching the result and then checking direction flags. Logic-1 HGL(08h:bit3) will cause the high-G detection results latched. Then high-G direction flags (XHGP, XHGN, YHGP, YHGN, ZHGP, ZHGN, 0Ch:bit5~0) can be checked to detail the high-G axis and direction upon high-G detection. The latch will be automatically cleared after the high-G flag register (0Ch) is read. Following summarizes the meaning when respective flag is set.1. XHGP: high-G detected in the X-axis positive direction2. XHGN: high-G detected in the X-axis negative direction3. YHGP: high-G detected in the Y-axis positive direction4. YHGN: high-G detected in the Y-axis negative direction5. ZHGP: high-G detected in the Z-axis positive direction6. ZHGN: high-G detected in the Z-axis negative directionPlease note that when the enabled multiple axial detections are logic-AND’ed (HGAO is logic-1) the high-G latch (HGL is logic-1) is not supported. The outcome may not be repeatable when HGAO and HGL are both set.For INT× configuration, see “INT1 and INT2 Source Configure”. User can set respective high-G threshold, see "High-G Threshold" for details. For high-G interrupt and direction flags, see "Interrupt Status Registers" for details. For high-G latch, see “High-G Latch Control” for details.Click Interrupt EnableCLXEn, CLYEn, CLZEn (09h:bit2, 1, 0) are the X-, Y-, and Z-axis click interrupt enable control bits respectively. If the respective click interrupt enable bit is set to 1, click monitoring is enabled for the respective axis. DMARD08 will check closely if the respective axis acceleration value double crosses some click threshold. In such case a click event is detected on the way of second cross. On detection the configured INT× pin will be latched to logic-1. The click interrupt flag (CLInt, 0Dh:bit6) serves the same purpose and manner as the INTx pin. This flag can be read via the SPI/I2C digital interface, and therefore is an alternative to the INTx pin if end users have GPIO constraint. Respective click direction flags (XCLP, XCLN, YCLP, YCLN, ZCLP, ZCLN, 0Dh:bit5~0) will also be set to 1 depending on detected axis and direction. The latch will be automatically cleared after the click flag register (0Dh) is read. See "Interrupt Status Registers" for details. For INT× configuration, see “INT1 and INT2 Source Configure”. User can set respective click threshold, see "Click Threshold" for details.High-G ThresholdHGth[3:0] (0Ah:bit7~4) is the 4-bit high-G threshold control register with 250mg per code. The effective setting range is from 0Ch (3.0g) to 01h (250mg). The default value is 08h (2.0g). See "High-G Interrupt Enable" for high-G detection enable control.Freefall ThresholdFFth[3:0] (0Ah:bit3~0) is the 4-bit freefall threshold control register with 62.5mg per code. The effective setting range is from 0Fh (937.5mg) to 01h (62.5mg). The default value is 08h (500mg). See "Freefall Interrupt Enable" for freefall detection enable control.Click ThresholdClickth[3:0] (0Bh: bit3~0) is the 4-bit click threshold control register with 250mg per code. The effective setting range is from 0Ch (3.0g) to 01h (250mg). The default value is 08h (2.0g). The threshold will be checked against double-cross for click event when the click interrupt enable is set, see "Click Interrupt Enable" for proper register setup. Appropriate flag will be set to 1 upon detecting click event when the INT pin is latched to logic-1, see "Interrupt Status Registers" for details.Interrupt Status Registers0Ch and 0Dh serve as the interrupt status registers. When relevant events trigger interrupts, configured INT× pin and appropriate interrupt status bits will be set. For a non-latched interrupt, the interrupt status register can serve as a replica of configured INT×, and accessed from typical digital interface instead of dedicated GPIO. For a latched interrupt, more detailed information is kept in the interrupt status registers for users to further distinguish interrupt sources. The latch will be automatically cleared after appropriate interrupt status register is read.Freefall Interrupt FlagFFInt (0Ch:bit7) is the freefall interrupt flag. The freefall interrupt flag serves the same purpose and manner as the configured INTx pin. This flag can be read via the SPI/I2C digital interface, and therefore is an alternative to the INTx pin if end users have GPIO constraint. See “INT1 and INT2Source Configure”, "Freefall Interrupt Enable" and "Freefall Threshold" for proper register setup.High-G Interrupt FlagHGInt (0Ch:bit6) is the high-G interrupt flag. The high-G interrupt flag serves the same purpose and manner as the configured INTx pin. This flag can be read via the SPI/I2C digital interface, and therefore is an alternative to the INTx pin if end users have GPIO constraint. See “INT1 and INT2 Source Configure” and “High-G Detection” for proper register setup.X-axis High-G FlagXHGP(0Ch:bit5) and XHGN(0Ch:bit4) is the flag for the high-G detection along the X-axis positive and negative direction respectively. XHGP is set when the X-axis acceleration exceeds the positive value of the high-G threshold. Likewise XHGN is set when the X-axis acceleration falls beyond the negative value of the high-G threshold. Please refer to “High-G Detection” for proper register setup.Y-axis High-G FlagYHGP(0Ch:bit3) and YHGN(0Ch:bit2) is the flag for the high-G detection along the Y-axis positive and negative direction respectively. YHGP is set when the Y-axis acceleration exceeds the positive value of the high-G threshold. Likewise YHGN is set when the Y-axis acceleration falls beyond the negative value of the high-G threshold. Please refer to “High-G Detection” for proper register setup.Z-axis High-G FlagZHGP(0Ch:bit1) and ZHGN(0Ch:bit0) is the flag for the high-G detection along the Z-axis positive and negative direction respectively. ZHGP is set when the Z-axis acceleration exceeds the positive value of the high-G threshold. Likewise ZHGN is set when the Z-axis acceleration falls beyond the negative value of the high-G threshold. Please refer to “High-G Detection” for proper register setup.Click Interrupt FlagCLInt (0Dh:bit6) is the click interrupt flag. The click interrupt flag serves the same purpose and manner as the configured INTx pin. This flag can be read via the SPI/I2C digital interface, and therefore is an alternative to the INTx pin if end users have GPIO constraint. See “INT1 and INT2 Source Configure”, "Click Interrupt Enable" and "Click Threshold" for proper register setup.X-axis Click FlagXCLP (0Dh:bit5) and XCLN (0Dh:bit4) are X-axis positive and negative direction click flag. The flag will be latched to 1 upon detecting click event along X-axis when the configured INT× pin is latched to logic-1. The X-axis click event is to check double-crossing some click threshold. Depending on the double-crossing direction, positive or negative flag is set respectively. The click event is fired at the second crossing. For example, when the X-axis click enable is set, i.e. CLXEn (09h:bit2) = 1, with default threshold value 2.0g, i.e. Clickth[3:0] (0Bh:bit3~0) = 08h, Figure 5 shows a scenario that the X acceleration first double-cross the positive threshold 2.0g and then secondly double-cross the negative threshold -2.0g. The first double-cross will trigger positive direction click (flag XCLP set to 1) at the second cross. The latter double-cross will trigger negative direction click (flag XCLN set to 1) at the second cross. See “INT1 and INT2 Source Configure”, "Click Interrupt Enable" and "Click Threshold" forproper register setup.Figure 5: X-axis Click Event Trigger ExampleY-axis Click FlagYCLP (0Dh:bit3) and YCLN (0Dh:bit2) are Y-axis positive and negative direction click flag. They work in analog to XCLP and XCLN.Z -axis Click FlagZCLP (0Dh:bit1) and ZCLN (0Dh:bit0) are Z-axis positive and negative direction click flag. They work in analog to XCLP and XCLN.Digital InterfaceDMARD08 provides two digital interfaces (SPI 4-wire and I2C) and an interrupt output signal for easy configuration and data/status query. The digital interface can be used to regularly read the data registers of acceleration and temperature output. The DMARD08 can also be configured by setting up proper control registers via the digital interface. For example, the interrupt pin can be configured to response to freefall or click event. Upon triggered interrupt, user can use the digital interface to check the interrupt status register for proper interrupt source verification.I2C InterfaceDMARD08 includes a slave I2C interface. CS must be connected to ground when choosing I2C as digital interface. The I2C bus takes master clock through SCL pin and exchanges serial data via SDI. SDI is bidirectional (input/output) with open drain. It must be connected externally to VIF via a pull-up resistor. SDO is used to set I2C slave address SDO-bit. The SDO-bit can be set to 1 by connecting SDO to VIF, or to 0 by grounding.I2C Slave AddressDMARD08 has a 7-bit slave address. The six high bits is fixed at value 001110b. The LSB of slave address (bit1 or SDO-bit) can be set to either 1 or 0 by physical SDO connection. For example if SDO is connected to high (VIF), the 7-bit slave address is 0011101b, and vice versa. Additional RW bit sets the chip in read or write mode, RW = 0 for write and 1 for read. Table 8 summaries the I2C slave address and RW.Table 9: I2C slave address & RWSlave Addressbit7bit6bit5bit4bit3bit2bit1(SDO-bit)bit0(RW)Hex Read/Write0 0 38h Write0 1 39h Read1 0 3Ah Write0 0 1 1 1 01 1 3Bh ReadI2C Access FormatData transfer begins by bus master indicating a start condition (ST) of a falling edge on SDI when SCL is high. Stop condition (SP) also indicated by bus master is a rising edge on SDI when SCK is high.After a start condition, the slave address + RW bit must be sent by master. If the slave address does not match with DMARD08, there is no acknowledge and the following data transfer will not affect DMARD08. If the slave address corresponds to DMARD08, it will acknowledge by pulling SDI to low and the SDI line is let free enabling the data transfer. The master should let the SDI high (no pull down) and generate a high SCL pulse for DMARD08 acknowledge.Table 10: I2C access formatI2C SpecificationsTable 11: I2C Timing SpecificationParameter Symbol Minimum Typical Maximum Unit SCL clock frequency SCL — — 400 kHzClock low period t LOW 1.2 — — µsClock high period t HIGH0.6 — — µsBus free to new start t BUF 1.2 — — µsStart hold time t HD.STA0.6 — — µsStart setup time t SU.STA0.6 — — µsData-in hold time t HD.DAT0 — — µsData-in setup time t SU.DAT100 — — nsStop setup time t SU.STO0.6 — — µsData-out hold time t DH50 — — nsFigure 6: I2C Timing DiagramSPI InterfaceThe SPI interfaces using four-wire bus provide 22-bit protocols. Multiple read/write is supported.The communication starts with a read/write (R/W) control bit with R/W equals 0 for writing or 1 for reading. Following the R/W control bit comes a 13-bit address and an 8-bit data for single read/write, as shown in Figure 7 & 8. To read 11-bit acceleration and temperature data, the SPI interface provides an option to use the multiple read commands to read more than one byte. This is activated when the serial enable pin CS stays active high after the read out of a data register, as shown in 9 & 10.CS is active high. Data on SDI is latched by DMARD08 at SCL rising edge and the SDO changes state at SCL falling edge. Communication starts when CS goes to high and stops when CS goes to low. During these transitions on CS, SCL must be high.SPI SpecificationsParameter Symbol Minimum Typical Maximum Unit CS setup time t s0300——nsData setup time t s1150——nsCS hold time t h0150——nsData hold time t h1150——nsSCL pulse low width t w1L160——nsSCL pulse high width t w1H160——nsCS pulse low width t w21——µsFigure 7: SPI Single ReadFigure 8: SPI Single WriteFigure 9: SPI Multiple ReadFigure 10: SPI Multiple WritePackageOutline DimensionAxes OrientationFigure 12: Axes Orientation of DMARD08RoHS ComplianceThe 16-pin LGA package conforms to the EU directive on the restriction of the use of certain hazardous substances in electrical and electronic equipment 2002/95/EC. Surface Mounting InformationThe accelerometer is a delicate device that is sensitive to the mechanical and thermal stress. Proper PCB board design and well-executed soldering processes are crucial to ensure consistent performance. A recommended land pad layout can be found in the Figure 13. For more SMT information, please refer to application note “AN004: SMT Guide for Accelerometer in LGA Package”.Detailed DimensionPCB Land Pad SR OpenLGA Package Lead Figure 13: Layout Recommendation for PCB Land Pad and SR OpenDocument History and ModificationRevision No. Description Date Rev1.0 First release 2011/8/1。