7-机器人控制的实际应用第七章RobustControl
利用Python进行机器人控制和自动化任务

利用Python进行机器人控制和自动化任务Python是一种简洁、易学且功能强大的编程语言,被广泛使用于各种领域,包括机器人控制和自动化任务。
本文将介绍如何利用Python来实现机器人控制和自动化任务,包括基本概念、常用工具和实际案例。
一、机器人控制基础机器人控制是指通过编程来控制机器人执行各种任务。
在Python中,可以使用不同的库来实现机器人控制,如RPi.GPIO、pySerial等。
这些库提供了与机器人硬件交互的功能,如控制电机、读取传感器数据等。
1. 硬件连接与配置在开始机器人控制之前,需要先连接硬件设备,并进行相应的配置。
这可能涉及到电路连接、引脚映射等操作。
例如,如果使用树莓派控制机器人,可以通过GPIO引脚连接电机、传感器等设备,并在Python程序中通过引脚编号进行控制。
2. 控制命令与动作机器人控制的核心是发送控制命令以执行相应的动作。
比如,可以通过控制电机的转速和方向来实现机器人的前进、后退、转向等操作。
同时,还可以通过读取传感器数据来实现避障、寻线等功能。
在Python中,可以使用相应的库函数来发送控制命令,并通过循环控制实现持续的机器人运动。
二、自动化任务实现除了机器人控制,Python也可以用于自动化任务的实现。
自动化任务是指通过编程来自动执行繁琐、重复的任务,提高工作效率。
下面介绍几个常见的自动化任务案例。
1. 网络爬虫网络爬虫是指通过程序自动获取互联网上的信息。
Python提供了强大的网络爬虫库,如BeautifulSoup、Scrapy等。
通过这些库,可以编写程序来自动抓取网页内容、提取关键信息,并进行进一步的分析和处理。
2. 自动化测试自动化测试是指利用程序来自动检测软件系统的功能和质量。
Python提供了丰富的测试框架,如unittest、pytest等。
通过这些框架,可以编写测试脚本来自动执行测试用例、生成测试报告,并进行断言和异常处理。
3. 数据处理与分析Python在数据处理和分析方面有着广泛的应用。
机器人顶刊论文
机器人顶刊论文机器人领域内除开science robotics以外,TRO和IJRR是机器人领域的两大顶刊,最近师弟在选择研究方向,因此对两大顶刊的论文做了整理。
TRO的全称IEEE Transactions on Robotics,是IEEE旗下机器人与自动化协会的汇刊,最新的影响因子为6.123。
ISSUE 61 An End-to-End Approach to Self-Folding Origami Structures2 Continuous-Time Visual-Inertial Odometry for Event Cameras3 Multicontact Locomotion of Legged Robots4 On the Combined Inverse-Dynamics/Passivity-Based Control of Elastic-Joint Robots5 Control of Magnetic Microrobot Teams for Temporal Micromanipulation Tasks6 Supervisory Control of Multirotor Vehicles in Challenging Conditions Using Inertial Measurements7 Robust Ballistic Catching: A Hybrid System Stabilization Problem8 Discrete Cosserat Approach for Multisection Soft Manipulator Dynamics9 Anonymous Hedonic Game for Task Allocation in a Large-Scale Multiple Agent System10 Multimodal Sensorimotor Integration for Expert-in-the-Loop Telerobotic Surgical Training11 Fast, Generic, and Reliable Control and Simulation of Soft Robots Using Model Order Reduction12 A Path/Surface Following Control Approach to Generate Virtual Fixtures13 Modeling and Implementation of the McKibben Actuator in Hydraulic Systems14 Information-Theoretic Model Predictive Control: Theory and Applications to Autonomous Driving15 Robust Planar Odometry Based on Symmetric Range Flow and Multiscan Alignment16 Accelerated Sensorimotor Learning of Compliant Movement Primitives17 Clock-Torqued Rolling SLIP Model and Its Application to Variable-Speed Running in aHexapod Robot18 On the Covariance of X in AX=XB19 Safe Testing of Electrical Diathermy Cutting Using a New Generation Soft ManipulatorISSUE 51 Toward Dexterous Manipulation With Augmented Adaptive Synergies: The Pisa/IIT SoftHand 22 Efficient Equilibrium Testing Under Adhesion and Anisotropy Using Empirical Contact Force Models3 Force, Impedance, and Trajectory Learning for Contact Tooling and Haptic Identification4 An Ankle–Foot Prosthesis Emulator With Control of Plantarflexion and Inversion–Eversion Torque5 SLAP: Simultaneous Localization and Planning Under Uncertainty via Dynamic Replanning in Belief Space6 An Analytical Loading Model for n -Tendon Continuum Robots7 A Direct Dense Visual Servoing Approach Using Photometric Moments8 Computational Design of Robotic Devices From High-Level Motion Specifications9 Multicontact Postures Computation on Manifolds10 Stiffness Modulation in an Elastic Articulated-Cable Leg-Orthosis Emulator: Theory and Experiment11 Human–Robot Communications of Probabilistic Beliefs via a Dirichlet Process Mixture of Statements12 Multirobot Reconnection on Graphs: Problem, Complexity, and Algorithms13 Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras14 Reactive Trajectory Generation for Multiple Vehicles in Unknown Environments With Wind Disturbances15 Resource-Aware Large-Scale Cooperative Three-Dimensional Mapping Using Multiple Mobile Devices16 Control of Planar Spring–Mass Running Through Virtual Tuning of Radial Leg Damping17 Gait Design for a Snake Robot by Connecting Curve Segments and ExperimentalDemonstration18 Server-Assisted Distributed Cooperative Localization Over Unreliable Communication Links19 Realization of Smooth Pursuit for a Quantized Compliant Camera Positioning SystemISSUE 41 A Survey on Aerial Swarm Robotics2 Trajectory Planning for Quadrotor Swarms3 A Distributed Control Approach to Formation Balancing and Maneuvering of Multiple Multirotor UAVs4 Joint Coverage, Connectivity, and Charging Strategies for Distributed UAV Networks5 Robotic Herding of a Flock of Birds Using an Unmanned Aerial Vehicle6 Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures7 Decentralized Trajectory Tracking Control for Soft Robots Interacting With the Environment8 Resilient, Provably-Correct, and High-Level Robot Behaviors9 Humanoid Dynamic Synchronization Through Whole-Body Bilateral Feedback Teleoperation10 Informed Sampling for Asymptotically Optimal Path Planning11 Robust Tactile Descriptors for Discriminating Objects From Textural Properties via Artificial Robotic Skin12 VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator13 Zero Step Capturability for Legged Robots in Multicontact14 Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance15 Physically Plausible Wrench Decomposition for Multieffector Object Manipulation16 Considering Uncertainty in Optimal Robot Control Through High-Order Cost Statistics17 Multirobot Data Gathering Under Buffer Constraints and Intermittent Communication18 Image-Guided Dual Master–Slave Robotic System for Maxillary Sinus Surgery19 Modeling and Interpolation of the Ambient Magnetic Field by Gaussian Processes20 Periodic Trajectory Planning Beyond the Static Workspace for 6-DOF Cable-Suspended Parallel Robots1 Computationally Efficient Trajectory Generation for Fully Actuated Multirotor Vehicles2 Aural Servo: Sensor-Based Control From Robot Audition3 An Efficient Acyclic Contact Planner for Multiped Robots4 Dimensionality Reduction for Dynamic Movement Primitives and Application to Bimanual Manipulation of Clothes5 Resolving Occlusion in Active Visual Target Search of High-Dimensional Robotic Systems6 Constraint Gaussian Filter With Virtual Measurement for On-Line Camera-Odometry Calibration7 A New Approach to Time-Optimal Path Parameterization Based on Reachability Analysis8 Failure Recovery in Robot–Human Object Handover9 Efficient and Stable Locomotion for Impulse-Actuated Robots Using Strictly Convex Foot Shapes10 Continuous-Phase Control of a Powered Knee–Ankle Prosthesis: Amputee Experiments Across Speeds and Inclines11 Fundamental Actuation Properties of Multirotors: Force–Moment Decoupling and Fail–Safe Robustness12 Symmetric Subspace Motion Generators13 Recovering Stable Scale in Monocular SLAM Using Object-Supplemented Bundle Adjustment14 Toward Controllable Hydraulic Coupling of Joints in a Wearable Robot15 Geometric Construction-Based Realization of Spatial Elastic Behaviors in Parallel and Serial Manipulators16 Dynamic Point-to-Point Trajectory Planning Beyond the Static Workspace for Six-DOF Cable-Suspended Parallel Robots17 Investigation of the Coin Snapping Phenomenon in Linearly Compliant Robot Grasps18 Target Tracking in the Presence of Intermittent Measurements via Motion Model Learning19 Point-Wise Fusion of Distributed Gaussian Process Experts (FuDGE) Using a Fully Decentralized Robot Team Operating in Communication-Devoid Environment20 On the Importance of Uncertainty Representation in Active SLAM1 Robust Visual Localization Across Seasons2 Grasping Without Squeezing: Design and Modeling of Shear-Activated Grippers3 Elastic Structure Preserving (ESP) Control for Compliantly Actuated Robots4 The Boundaries of Walking Stability: Viability and Controllability of Simple Models5 A Novel Robotic Platform for Aerial Manipulation Using Quadrotors as Rotating Thrust Generators6 Dynamic Humanoid Locomotion: A Scalable Formulation for HZD Gait Optimization7 3-D Robust Stability Polyhedron in Multicontact8 Cooperative Collision Avoidance for Nonholonomic Robots9 A Physics-Based Power Model for Skid-Steered Wheeled Mobile Robots10 Formation Control of Nonholonomic Mobile Robots Without Position and Velocity Measurements11 Online Identification of Environment Hunt–Crossley Models Using Polynomial Linearization12 Coordinated Search With Multiple Robots Arranged in Line Formations13 Cable-Based Robotic Crane (CBRC): Design and Implementation of Overhead Traveling Cranes Based on Variable Radius Drums14 Online Approximate Optimal Station Keeping of a Marine Craft in the Presence of an Irrotational Current15 Ultrahigh-Precision Rotational Positioning Under a Microscope: Nanorobotic System, Modeling, Control, and Applications16 Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing17 Controlling Noncooperative Herds with Robotic Herders18 ε⋆: An Online Coverage Path Planning Algorithm19 Full-Pose Tracking Control for Aerial Robotic Systems With Laterally Bounded Input Force20 Comparative Peg-in-Hole Testing of a Force-Based Manipulation Controlled Robotic HandISSUE 11 Development of the Humanoid Disaster Response Platform DRC-HUBO+2 Active Stiffness Tuning of a Spring-Based Continuum Robot for MRI-Guided Neurosurgery3 Parallel Continuum Robots: Modeling, Analysis, and Actuation-Based Force Sensing4 A Rationale for Acceleration Feedback in Force Control of Series Elastic Actuators5 Real-Time Area Coverage and Target Localization Using Receding-Horizon Ergodic Exploration6 Interaction Between Inertia, Viscosity, and Elasticity in Soft Robotic Actuator With Fluidic Network7 Exploiting Elastic Energy Storage for “Blind”Cyclic Manipulation: Modeling, Stability Analysis, Control, and Experiments for Dribbling8 Enhance In-Hand Dexterous Micromanipulation by Exploiting Adhesion Forces9 Trajectory Deformations From Physical Human–Robot Interaction10 Robotic Manipulation of a Rotating Chain11 Design Methodology for Constructing Multimaterial Origami Robots and Machines12 Dynamically Consistent Online Adaptation of Fast Motions for Robotic Manipulators13 A Controller for Guiding Leg Movement During Overground Walking With a Lower Limb Exoskeleton14 Direct Force-Reflecting Two-Layer Approach for Passive Bilateral Teleoperation With Time Delays15 Steering a Swarm of Particles Using Global Inputs and Swarm Statistics16 Fast Scheduling of Robot Teams Performing Tasks With Temporospatial Constraints17 A Three-Dimensional Magnetic Tweezer System for Intraembryonic Navigation and Measurement18 Adaptive Compensation of Multiple Actuator Faults for Two Physically Linked 2WD Robots19 General Lagrange-Type Jacobian Inverse for Nonholonomic Robotic Systems20 Asymmetric Bimanual Control of Dual-Arm Exoskeletons for Human-Cooperative Manipulations21 Fourier-Based Shape Servoing: A New Feedback Method to Actively Deform Soft Objects into Desired 2-D Image Contours22 Hierarchical Force and Positioning Task Specification for Indirect Force Controlled Robots。
第七章机器人控制新 72页PPT文档
驱动控制器2
驱动控制器3
驱动控制器4
机器人本体
机器人控制系统的构成
2019/9/5
8
第七章 机器人控制
分析各层(级)的关系与区别
知识粒度 数据处理 功能类别
作业控制级
粗
模糊
决策
运动控制级
中
精确 任务分解
驱动控制级
细
精确
控制
通过分层递阶的组织形式才能完成复杂任务
2019/9/5
9
第七章 机器人控制
Θ为表示旋转关节或平移关节位移的n×1向量;
为表示旋转关节力矩或平移关节力的n×1向量
2019/9/5
27
前馈控制和超前控制 前馈控制:从给定信号中提取速度、加速度信号。把它加在伺服系统 的适当部位,以消除系统的速度和加速度跟踪误差。 超前控制:估计下一时刻的位置误差,并把这个估计量加到下一时刻 的控制量中。
2019/9/514 Nhomakorabea第七章 机器人控制
各种智能控制策略
记忆-修正控制 (迭代学习控制 ) 记忆前一次的运动误差,改进后一次的控制量;适用于 重复操作的场合。 听觉控制 有的机器人可以根据人的口头命令做出回答或执行任务, 这是利用了声音识别系统。 视觉控制 常将视觉系统用于判别物体形状和物体之间的关系,也 可以用来测量距离、选择运动途径。 递阶控制(组织级、协调级、执行级) 最低层是各关节的伺服系统,最高层是管理(主)计算 机;大系统控制理论可以用在机器人系统中。
解耦控制(decoupling control) 鲁棒控制(robustness control) 容错控制(fault tolerant control)
第七章 机器人控制
多变量控制系统的一般结构 传递函数矩阵:开环传递函数矩阵,闭环传递函数矩 阵 多变量系统分析和计算的特殊性:变量是向量,传函 是矩阵(矩阵的计算不满足交换律) 多变量系统控制的发展: 1.状态空间法:
机器人控制器 高级算法介绍
机器人控制器的高级算法主要包括以下几个方面:1. 模型预测控制(Model Predictive Control, MPC):MPC是一种基于模型的控制算法,它通过预测未来一段时间内系统的状态和输出,优化未来的控制输入以达到最佳的控制性能。
在机器人控制中,MPC 可以处理多变量、非线性和约束条件等问题,适用于复杂的运动规划和轨迹跟踪任务。
2. 自适应控制(Adaptive Control):自适应控制算法能够根据系统参数的变化或者未知环境的影响自动调整控制参数,以保持良好的控制性能。
在机器人控制中,自适应控制可用于处理模型不确定性、外界干扰和机械磨损等问题。
3. 滑模控制(Sliding Mode Control, SMC):SMC是一种鲁棒控制算法,它通过设计特殊的控制律使得系统状态快速进入并保持在一个所谓的“滑动面”上,从而消除系统中的不确定性影响和外部扰动。
在机器人控制中,SMC常用于保证系统的稳定性和精确跟踪。
4. 神经网络控制(Neural Network Control):神经网络控制利用人工神经网络的非线性映射能力和学习能力来实现对复杂系统的控制。
在机器人控制中,神经网络可以用于建模未知的动态系统、处理高维和非线性问题,以及实现智能决策和自主学习。
5. 模糊控制(Fuzzy Control):模糊控制是一种基于模糊逻辑的控制方法,它可以处理不精确、不确定和非线性的控制问题。
在机器人控制中,模糊控制常用于处理语言描述的控制规则和复杂的环境交互。
6. 遗传算法和粒子群优化(Genetic Algorithm and Particle Swarm Optimization, GA & PSO):这些是两种常用的优化算法,可以用于寻找最优的控制参数或控制策略。
在机器人控制中,GA和PSO可以用于优化路径规划、姿态控制和动作学习等问题。
7. 深度强化学习(Deep Reinforcement Learning, DRL):DRL结合了深度学习和强化学习的优点,能够在复杂的环境中学习最优的控制策略。
机器人技术及应用-机器人控制系统举例

机器人技术及应用-机器人控制系统举例机器人技术及应用机器人控制系统举例在当今科技飞速发展的时代,机器人已经成为了我们生活和生产中不可或缺的一部分。
从工业制造中的自动化生产线,到医疗领域的手术机器人,再到家庭服务中的智能机器人,机器人的应用范围越来越广泛。
而机器人能够如此高效、精准地完成各种任务,离不开其核心的控制系统。
机器人控制系统就像是机器人的“大脑”,它负责指挥机器人的动作、感知环境、处理信息以及做出决策。
一个优秀的机器人控制系统能够使机器人更加灵活、智能和可靠,从而更好地满足各种应用需求。
接下来,让我们通过几个具体的例子来深入了解一下机器人控制系统。
首先,我们来看工业机器人中的控制系统。
以汽车生产线上的焊接机器人为例,它需要在快速移动的同时,精确地将焊点焊接在指定的位置上,并且要保证焊接的质量和稳定性。
为了实现这一目标,其控制系统通常采用了高精度的运动控制算法和传感器反馈技术。
在运动控制方面,控制系统会根据预设的焊接路径和速度,计算出机器人各个关节的运动轨迹和速度指令。
通过精确控制电机的转速和转角,实现机器人手臂的平稳、快速运动。
同时,为了应对生产过程中的各种不确定性因素,如工件的尺寸偏差、装配误差等,控制系统还会实时监测机器人的实际位置和姿态,并与预设值进行比较,通过反馈控制算法对运动指令进行调整,以确保焊接的精度和质量。
在传感器方面,焊接机器人通常配备了激光测距传感器、视觉传感器等设备,用于感知工件的位置、形状和焊缝的特征。
这些传感器采集到的数据会实时传输给控制系统,控制系统经过处理和分析后,能够根据实际情况对焊接参数进行优化,例如调整焊接电流、电压和焊接时间等,从而提高焊接的效率和质量。
除了工业机器人,服务机器人中的控制系统也有着独特的特点和应用。
以家用扫地机器人为例,它需要在复杂的家庭环境中自主移动、避开障碍物,并完成清扫任务。
扫地机器人的控制系统通常采用了基于地图构建和路径规划的算法。
《机器人控制》课件
描述机器人轨迹规划的方法和步骤。
详细描述
介绍机器人轨迹规划的定义、目的和意义,以及基于时间、基于距离、基于加速 度等轨迹规划方法,并给出相应的规划步骤和实例。
04
机器人控制算法
基于规则的控制算法
基础且常用
基于规则的控制算法是机器人控制中最为基础和常用的算法之一。它根据预先设 定的规则或逻辑,对机器人的运动进行控制。这种算法通常比较简单,易于实现 ,适合于一些简单的、确定性强的任务。
详细描述
介绍机器人运动学的定义、研究内容 、坐标系建立、运动学方程的建立等 基本概念,以及正运动学和逆运动学 的求解方法。
机器人动力学基础
总结词
描述机器人动力学的基础概念和原理。
详细描述
介绍机器人动力学的基本概念,如牛顿-欧拉方程、拉格朗日方程等,以及机器 人在各种运动状态下的动力学特性。
机器人轨迹规划
服务机器人应用实例
家庭服务
服务机器人进入家庭,提 供清洁、烹饪、照看老人 和儿童等服务,提高家庭 生活质量。
医疗护理
服务机器人在医疗护理领 域协助医生诊断、护理病 人,提高医疗服务水平。
旅游导览
服务机器人在旅游景区提 供导览服务,为游客提供 详细的信息和便利的导航 。
特种机器人应用实例
深海探测
特种机器人潜入深海进行资源勘探、海洋生物研 究等,拓展人类对海洋的认识。
《机器人控制》ppt课件
• 机器人控制概述 • 机器人感知与决策 • 机器人运动控制 • 机器人控制算法 • 机器人应用实例
01
机器人控制概述
机器人控制的基本概念
机器人控制
控制系统的目标
指通过预设的算法或指令,使机器人 按照要求完成一系列动作或任务的过 程杂、精确的 任务。
《机器人控制》课件
结语
对机器人控制的展望
机器人控制将在不断推动科技和社会的进步中发挥 越来越重要的作用,其潜力和可能性令人兴奋和期 待。
机器人控制的现状与未来
回顾机器人控制的发展历程,探讨目前的应用和技 术,展望未来的发展方向。
轨迹控制
在给定的路径上控制机器人的运动,使其按照规 定的轨迹执行任务。
力控制
通过控制机器人的力量和压力,使其能够应对不 同的物体和环境。
路径规划控制
通过路径规划算法来控制机器人的运动,使其能 够自动选择最优路径。
机器人控制的方法
1 PID控制
2 模糊控制
使用PID(比例、积分和微分)算法来控制机 器人的动作和位置。
1 人பைடு நூலகம்智能和机器学习的应用
将人工智能和机器学习技术与机器人控制相 结合,实现更智能和自主的机器人系统。
2 机器人与人类的合作
发展和研究机器人与人类之间的协作与合作 方式,实现人机协同工作。
3 安全问题的解决
解决机器人控制中的安全和伦理问题,确保 机器人操作的可靠性和安全性。
4 更大规模的应用
推动机器人控制技术的发展,使其能够在更 广泛的领域和场景中得到应用。
《机器人控制》PPT课件
欢迎来到《机器人控制》课件!本课程将介绍机器人控制的概念、种类、方 法、应用以及挑战与发展趋势。
概述
机器人控制是指通过控制器对机器人的行为进行管理和调整的过程。掌握机 器人控制的基本原理对于实现精准和灵活的机器人操作至关重要。
机器人控制的种类
位置控制
通过控制机器人的关节或末端执行器的位置来实 现精确的定位和操作。
医疗服务
机器人控制技术在手 术机器人和康复机器 人等医疗设备中的应 用,为患者提供更好 的医疗服务。
ControlinRobotics:控制机器人

Mark W. Spong and Masayuki FujitaIntroductionThe interplay between robotics and control theory has a rich history extending back over half a century. We begin this section of the report by briefly reviewing the history of this interplay, focusing on fundamentals—how control theory has enabled solutions to fundamental problems in robotics and how problems in robotics have motivated the development of new control theory. We focus primarily on the early years, as the importance of new results often takes considerable time to be fully appreciated and to have an impact on practical applications. Progress in robotics has been especially rapid in the last decade or two, and the future continues to look bright.Robotics was dominated early on by the machine tool industry. As such, the early philosophy in the design of robots was to design mechanisms to be as stiff as possible with each axis (joint) controlled independently as a single-input/single-output (SISO) linear system. Point-to-point control enabled simple tasks such as materials transfer and spot welding. Continuous-path tracking enabled more complex tasks such as arc welding and spray painting. Sensing of the external environment was limited or nonexistent.Consideration of more advanced tasks such as assembly required regulation of contact forces and moments. Higher speed operation and higher payload-to-weight ratios required an increased understanding of the complex, interconnected nonlinear dynamics of robots. This requirement motivated the development of new theoretical results in nonlinear, robust, and adaptive control, which in turn enabled more sophisticated applications.Today, robot control systems are highly advanced with integrated force and vision systems. Mobile robots, underwater and flying robots, robot networks, surgical robots, and others are playing increasing roles in society. Robots are also ubiquitous as educational tools in K-12 and college freshman experience courses.The Early YearsThe first industrial robot in the United States was the Unimate, which was installed in a General Motors plant in 1961 and used to move die castings from an assembly line and to weld these parts on auto bodies (Fig. 1). Full-scale production began in 1966. Another company with early robot products was Cincinnati Milacron, with companies in Japan and Europe also entering the market in the 1970s. Prior to the 1980s, robotics continued to be focused on manipulator arms and simple factory automation tasks: materials handling, welding, and painting.From a control technology standpoint, the primary barriers to progress were the high cost of computation, a lack of good sensors, and a lack of fundamental understanding of robot dynamics. Given these barriers, it is not surprising that two factors were the primary drivers in the advancement of robot control in these early days. First, with the realization of the close connection between robot performance and automatic control, a community developed that focused on increasing fundamental understanding of dynamics, architecture, and system-level design. In retrospect, we can see that thiswork had some significant limitations:control schemes were mostly based onapproximate linear models and did notexploit knowledge of the naturaldynamics of the robot, vision and forcecontrol were not well integrated intothe overall motion control architecture,and mechanical design and controlsystem design were separate.The second factor was exogenous toboth the controls and roboticscommunities, namely, Moore’s Law.The increasing speed and decreasingcost of computation have been keyenablers for the development andimplementation of advanced, sensor-based control. for robots, and creative new ideas —Control of ManipulatorsBeginning in the mid-1980s, robot manipulatorsbecame a “standard” control application, and the synergies were widely recognized and exploited in research. The earlier research on computed torque and inverse dynamics control [1], for example,helped motivate the differential geometric method of feedback linearization that has been applied to numerous practical problems within and outside of robotics [2]. For fully actuated rigid manipulators, the feedback linearization method was put on a firmtheoretical foundation and shown to be equivalent to the inverse dynamics method [3]. The firstnontrivial application of the feedback linearizationimmediately raised. Standard Hnature of the uncertainty. A solution for the special case of second-order systems, using the small-gain theorem, was worked out in [5], and the general case was presented in [6], which subsequently led to a new area of control now known as L1-optimal control—a prime example of a robotics control contribution leading to new control theory. Several other methods of robust control, such as sliding modes and Lyapunov methods, have also been applied to the robust control problem for robot manipulators.The mid-1980s were also a time of development in adaptive control, and again the connection with robotics was pursued. The fundamental breakthrough in the adaptive control of rigid manipulators was made by Slotine and Li [7]. The key to the solution of the adaptive control problem was the recognition of two important properties of Lagrangian dynamical systems: linearity in the inertia parameters and the skew-symmetry property of the robot inertia matrix [8].Subsequently, the skew symmetry property was recognized as being related to the fundamental property of passivity. The term passivity-based control was introduced in the context of adaptive control of manipulators [9]. Passivity-based control has now become an important design method for a wide range of control engineering applications. Array independent of the time delay.A state-of-the-art teleoperated robot is theDa Vinci surgical system from IntuitiveSurgical, which integrates advances inmicromanipulators, miniature cameras, and amaster-slave control system to enable asurgeon to operate on a patient via a consolewith a 3-D video feed and foot and handcontrols. However, neither force feedbacknor remote operations are supported as yet;the surgeon’s console is typically by thepatient’s side.Mobile Robotsby Brockett’ssystems do not exist [12]. Brockett’smethods , including hybrid switching control and time-varying approaches to stabilization of nonholonomic systems.Mobile robots are now regularly used in many applications. One prominent application is aiding disaster recovery efforts in mines and after earthquakes. Military uses, such as for roadside bomb detection, form another broad category. Recently, products have been developed for consumer applications, such as the Roomba® and other robots from iRobot. Finally, wheeled mobile robots are exploring Mars and are poised to return to the moon.Market Sizes and InvestmentThe robotics industry was slow getting started. Unimation did not show its first profit until 1975, almost a decade after it began full-scale production of its pioneering Unimate robot. Today, the Robotic Industries Association estimates that more than one million robots are in use worldwide; Japan has the largest deployment, with the United States having the second largest.According to one recent market research report from Electronics.ca Publications, the global market for robotics was worth $17.3 billion in 2008 and is projected to increase to $21.4 billion in 2014, a compound annual growth rate (CAGR) of 4.0%. The largest segment of the market is industrial applications, worth $11.5 billion. Industrial robots, with their heavy reliance on the automotive industry, were especially hard hit with the recent global recession—2009 shipments were down 50% from year-ago levels, according to the Robotic Industry Association. Projected growth is lower for this segment than for professional service (market size of $3.3 billion in 2008) and military ($917 million) applications. Domestic services, security, and space applications constitute smaller segments, although the huge success of the Roomba floor-cleaning robot has demonstrated the enormous potential of consumer robotics.Research ChallengesUnderactuationUnderactuated robots have fewer control inputs than degrees of freedom and are a natural progression from flexible-joint and flexible-link robots. Underactuation leads naturally to a consideration of partial or output feedback linearization as opposed to full-state feedback linearization. Consideration of normal forms and zero dynamics is important in this context [13]. Energy/passivity methods are fundamental for the control of underactuated systems.Visual Servo Control and Force ControlThe idea of using imaging or video sensors for robot control is not new; it predates the availability of low-cost, high-quality digital cameras and advances in computational platforms enabling real-time processing of digital video signals. These latter developments have significantly increased interest in the topic.Visual servo control has traditionally used two methodologies, namely, position-based control and image-based control [14]. Position-based control uses vision to estimate the absolute position of the robot and uses the computed position error in the control algorithm. Image-based control, on the other hand, is based on computing the error directly in the image plane of the camera and avoids calculation of the robot position; thus, it is less sensitive to kinematic and calibration errors. Recently, bothposition-based and image-based methods have been incorporated into hybrid switching control strategies in order to take advantage of the strengths and avoid the weaknesses of both approaches. Similar to vision-based control, force control in robotics has also traditionally been divided into two fundamental strategies, in this case, called hybrid position/force control and impedance control, respectively. Hybrid position/force control is based on the observation that one cannot simultaneously control both the position of a robot and the force it imparts to the environment. Thus, the task at hand can be decomposed into “directions” along which either position or force (but not both) is controlled. Conversely, impedance control does not attempt to control or track positions and forces. Rather the “mechanical impedance,” which is the suitably defined Laplace transform of the velocity/force ratio, is the quantity to be controlled.LocomotionThe development of legged robots is motivated by the fact that wheeled robots are not useful in rough terrain or in built structures. The number of legs involved is a free parameter in this research, with robots with as few as one (hopping robots) and as many as eight having been developed by multiple research groups. Bipedal robots are a particularly popular category, both for the anatomical similarity with their creators and because of the research challenges posed by their dynamic instability. An understanding of the dynamics and control of bipedal locomotion is also useful for the development ofprosthetic and orthotic devices to aid humans with disabilities or missing limbs.Readers who have seen videos of Honda’s Asimov robots (Fig. 2) (readers who have not can check YouTube) or other humanoid robots may think that bipedal robots are “for real” now. The accomplishments of this research are indeed impressive. These robots can walk up and down ramps and stairs, counteract pushes and pulls, change gait, roll carts, play table tennis, and perform other functions. But the transition from research laboratory to commercial practice has not been made as yet. In particular, challenges remain for control engineers in the locomotion aspects specifically.Control of bipedal locomotion requires consideration of three difficult issues: hybrid nonlinear dynamics, unilateral constraints, and underactuation. The hybrid nature of the control problem results from impacts of the foot with the ground, which introduce discrete transitions between phases of continuous dynamic motion. Unilateral constraints arise from the fact that the foot can push but not pull on the ground and so the foot/ground reaction forces cannot change sign. Underactuation results again from the(Credit: Gnsin) Figure 2. Honda’s Asimov humanoid robot at Expo 2005 in Aichi, Japan.foot/ground interaction; there is no actuation torque between the foot and the ground. All these difficult issues require advanced methods of control to address them adequately. Energy/passivity methods, geometric nonlinear control, partial feedback linearization, zero dynamics, and hybrid control theory are all fundamental tools for designing rigorous control algorithms for walking [15], [16].Multi-Agent Systems and Networked ControlNetworked control systems and multi-agent systems are important recent application areas for robotics (Fig. 3). Synchronization, coordination, cooperative manipulation, flocking, and swarming combine graph theoretic methods with nonlinear control.The eme rging “hot topic” of cyber-physical systems is also closely related to networked control. Cyber-physical systems will get their functionality through massive networking. Sensors, actuators, processors, databases, and control software will work together without the need to be collocated.Figure 3. Coordinated robots competing in the international RoboCup soccercompetition in 2003. The Cornell team, led by controls researcherRaffaello D’Andrea, won the competition in 1999, 2000, 2002, and 2003.ConclusionsRobotics today is a much richer field than even a decade or two ago, with far-ranging applications. Developments in miniaturization, in new sensors, and in increasing processing power have all openedMeasurement and Control, vol. 109, pp. 310-319, Dec. 1987.[5] M.W. Spong and M. Vidyasagar. “Robust linear compensator design for nonlinear r obotic Control,” IEEE Journal of Robotics and Automation, vol. RA 3, no. 4, pp. 345-350, Aug. 1987.[6] M. Vidyasagar. “Optimal rejection of persistent bounded disturbances,” IEEE Trans. Auto. Control, vol. AC-31, no. 6, pp. 527-534, June 1986.[7] J.-J.E. Slotine and W. Li. “On the adaptive control of robot m anipulators,” Int. J. Robotics Res., vol. 6, no. 3, pp. 147-157, Fall 1987.[8] D. Koditschek. “Natural motion of robot a rms,” in Proc. IEEE Conference on Decision and Control, Las Vegas, 1984.[9] R. Ortega and M.W. Spong. “Adaptive control of robot manipulators: A tut orial,” Automatica, vol. 25, no. 6, pp. 877-888, 1989.[10] R. Anderson and M. W. Spong. “Bilateral teleoperation with time d elay,” IEEE Trans. Aut. Cont., vol. 34, no. 5, pp. 494-501, May 1989.[11] G. Niemeyer and J.-J.E. Slotine. “Stable adaptive teleoperation,” IEEE Journal of Oceanographic Engineering, vol. 16, no. 1, pp. 152–162, 1991.[12] R. W. Brockett. “Asymptotic stability and feedback stabilization,” in Differential Geometric Control Theory, R.W. Brockett, R.S. Millman, and H. J. Sussmann, eds. Boston-Basel-Stuttgart: Birkhauser, 1983, pp. 181-191.[13] A. Isidori and C.I. Byrnes. “Output regulation of nonlinear systems,”IEEE Transactions on Automatic Control, vol. 35, no. 2, pp. 131-140, 1990.[14] S. A. Hutchinson, G.D. Hager, and P.I. Corke. “A tutorial on visual servo c ontrol,” IEEE Transactions on Robotics and Automation, vol. 12, no. 5, pp. 651-670, 1996.[15] E.R. Westervelt, J.W. Grizzle, and D.E. Koditschek. “Hybrid zero dynamics of planar biped w alkers,” IEEE Transactions on Automatic Control, vol. 48, no. 1, pp. 42-56, 2003.[16] M.W. Spong and F. Bullo. “Controlled symmetries and passive w alking,” IEEE Transactions on Automatic Control, vol. 50, no. 7, pp 1025-1031, 2005.Related ContentThe Impact of Control Technology report also includes more than 40 flyers describing specific “success stories” and “grand challenges” in control engineering and science, covering a variety of application domains. The ones below are closely related to the topic of this section.Success Stories∙Dynamic Positioning System for Marine Vessels –S.S. Ge, C.Y. Sang, and B.V.E. How∙Mobile-Robot-Enabled Smart Warehouses –R. D´AndreaGrand Challenges∙Control Challenges in High-Speed Atomic Force Microscopy –S.O.R. Moheimani∙Control for Offshore Oil and Gas Platforms –S.S. Ge, C.Y. Sang, and B.V.E. HowThese flyers—and all other report content—are available at /main/IoCT-report.。
强化学习在机器人控制中的应用与措施
强化学习在机器人控制中的应用与措施强化学习是一种让机器能够通过与环境的交互来学习和改进策略的方法。
它在机器人控制中的应用越来越广泛,因为它能够使机器人自主地完成复杂任务,并适应不断变化的环境。
本文将讨论强化学习在机器人控制中的应用以及采取的措施。
首先,强化学习在机器人控制中的一个重要应用是路径规划。
通过强化学习算法,机器人可以学习如何在不同的环境中找到最佳的路径。
例如,假设有一个机器人需要在一个复杂的迷宫中找到出口。
强化学习算法可以帮助机器人探索迷宫,并根据不同的路径选择策略进行学习。
在这个过程中,机器人会不断试验不同的路径,并根据奖励信号来调整策略,最终找到最优的路径。
为了实现这个目标,我们需要采取一些措施来帮助机器人学习。
首先,我们需要给机器人设定一个合适的目标。
在上述迷宫的例子中,目标就是找到出口。
机器人通过与环境的交互,不断试验不同的动作,并根据奖励信号来评估每个动作的好坏,从而逐步优化策略。
其次,我们需要设计一个适当的奖励机制。
奖励机制是强化学习中非常重要的一个部分,它可以指导机器人的学习过程。
在路径规划的例子中,我们可以设计一个奖励机制来鼓励机器人选择最短路径。
当机器人选择了一条短路径时,我们给予它正向的奖励;相反,如果机器人选择了一条长路径,我们给予它负向的奖励。
通过这样的奖励机制,机器人可以逐步学习到如何选择最佳路径。
除了路径规划,强化学习还可以应用于机器人的动作控制。
机器人在执行一些复杂的动作任务时,如抓取物体或者行走,需要能够自主地学习和改进动作策略。
强化学习可以帮助机器人通过与环境的交互,逐步改进动作策略,并提高执行动作任务的成功率。
在动作控制中,我们同样需要设计一个适当的奖励机制。
例如,在机器人抓取物体的任务中,我们可以给予机器人正向的奖励当它成功地抓取物体,而给予负向的奖励当它未能成功抓取。
通过这样的奖励机制,机器人可以逐渐学习到如何调整自己的动作策略,以增加抓取成功的概率。
《机器人控制技术》课程教学大纲

《机器人控制技术》课程教学大纲
说明:
1. 课外学时所针对的课外学习内容是指由教师根据课程大纲提出学习要求,专项布置并参与指导、检查进程、验收成效,由学生课外按学习团队完成的小项目、小课题,以及由学生对章节进行的自主学习。
课外学时计入课程总学时。
2. 课程内容及学时分配应包含课外部分,并明确教学方式和考核方法,以有效保障课外部分的实施。
3. 鼓励考核方式灵活多样,任课教师可根据课程特点规定课程总评成绩的组成及其比例,如平时成绩(出勤、作业、课堂发言等),建议比例控制在20%-30%之间;课外学习成绩(项目报告、课题报告等),建议比例控制在20%-30%;期末考试成绩,比例不得低于总评成绩的50%。
4. 本表适用于除新生研讨课、通识课、实验课之外的课程(自2011级起)。
5. 教务处将组织有关专家对课程大纲及其实施情况进行不定期抽查,以保证其实施的有效性。
机器人控制技术课件

关节运动
手的运动
数据存储
全局反馈
局部反馈
内部传感器
外部传感器
1.1 引言
机器人控制系统
机器人控制系统具体的工作过程是:主控计算机接 到工作人员输入的作业指令后,首先分析解释指令,确 定手的运动参数,然后进行运动学、动力学和插补运算, 最后得出机器人各个关节的协调运动参数。这些参数经 过通信线路输出到伺服控制级作为各个关节伺服控制系 统的给定信号。关节驱动器将此信号D/A转换后驱动各 个关节产生协调运动,并通过传感器将各个关节的运动 输出信号反馈回伺服控制级计算机形成局部闭环控制, 从而更加精确的控制机器人手部在空间的运动(作业任 务要求的)。
作业任务
1.3 运动控制
手的运动
运动学 关节位移、 动力学 关节驱动力 逆解 速度、加速度 正解 (矩)
关节产生运动 驱动 驱动装置
控制过程:
反馈
控制系统
根据机器人作业任务中要求的手的运动,通过运动 学逆解和数学插补运算得到机器人各个关节运动的位移 、速度和加速度,再根据动力学正解得到各个关节的驱 动力(矩)。机器人控制系统根据运算得到的关节运动 状态参数控制驱动装置,驱动各个关节产生运动,从而 合成手在空间的运动,由此完成要求的作业任务。
2、轨迹规划的实现过程
(1) PTP下的轨迹规划
q(t)
q q 第二步:已知机器人起点和终点 t0
q(t)
0
i的A关节变量取值 iB
t0
q(t)
分析:起点的变量取值如何
1.3 运动控制 关节运动伺服指令的生成
2、轨迹规划的实现过程 (1) PTP下的轨迹规划 第二步:已知机器人起点和终点的关节变量取值 A、三次多项式插值运算
控制理论在机器人控制中的应用研究

控制理论在机器人控制中的应用研究机器人作为一种人工智能的代表,正在逐渐渗透进我们生活的各个方面。
在工业生产中,它们能够执行一些简单、重复或危险的任务,从而提高人类工作效率和安全性。
同时,在医疗、服务业和娱乐等领域也有着广阔的应用前景。
机器人的控制是机器人技术中的核心问题之一,控制理论在其中扮演着不可或缺的角色。
一、机器人的控制机器人的控制指的是对机器人的运动、位置、力和速度等信息的监测、分析和调整,以保证机器人在执行任务时能够达到期望的性能要求。
机器人控制是一个复杂的系统工程,需要综合考虑机器人的机械结构、电子与信息技术、感知与识别技术以及控制理论等方面的问题。
其中,控制理论是机器人控制的核心之一。
控制理论是一种研究在特定条件下控制系统行为的理论。
其目的在于制定合适的控制方案,使得控制系统能够在预设目标下实现所需的性能要求。
控制理论包括传统的经典控制理论和现代的现代控制理论两种。
经典控制理论主要研究线性控制系统,如PID控制、根轨迹、频域法、状态空间法等,它们普遍应用于工业控制、电力控制、通信控制等领域。
而现代控制理论则更加注重非线性、复杂控制系统的控制策略,如自适应控制、模糊控制、神经网络控制等。
二、控制理论在机器人控制中的应用研究控制理论在机器人控制中的应用研究主要包括以下几个方面:1. 运动控制机器人的运动控制指的是控制机器人的位置、姿态和速度等信息,以实现机器人的自主导航、路径规划和避障等功能。
在运动控制中,控制理论主要应用于PID 控制、模糊控制、自适应控制等方面。
其中,PID控制是最广泛应用的一种运动控制方法,它通过对机器人位置、姿态和速度等信息的反馈控制来调整机器人的运动状态。
2. 力控制机器人的力控制指的是对机器人的作用力和速度的控制,以实现机器人的复杂操作和危险任务。
在力控制中,控制理论主要应用于阻抗控制、模糊控制等方面。
阻抗控制是一种可以自适应不同工作任务的控制策略,它可以根据工作环境的不同来改变机器人的力和速度。
随动控制技术在机器人系统中的应用研究

随动控制技术在机器人系统中的应用研究一、前言随着机器人技术的飞速发展,机器人系统的应用已经逐渐涵盖了许多领域。
机器人系统中的随动控制技术是非常重要的应用之一,它可以使机器人的控制更加灵活,从而提高机器人的效率、精度和安全性。
在本文中,我们将对随动控制技术在机器人系统中的应用进行研究和探讨。
二、随动控制技术的基本原理随动控制技术是指将机械系统与控制系统有机地结合在一起,使得机械系统可以随时、随地地跟随控制信号的变化而运动。
它的基本原理是通过传感器和控制器控制机械系统的运动轨迹,从而让机械系统达到预定的位置、速度和加速度等状态。
随动控制技术主要分为两种类型:一种是基于力的随动控制,另一种是基于视觉的随动控制。
基于力的随动控制采用传感器检测物体的力和力矩,从而对机械系统进行反馈控制。
基于视觉的随动控制则是通过摄像机或激光雷达等设备来获取场景中的信息,并通过控制器对机械系统进行反馈控制。
三、随动控制技术在机器人系统中的应用1. 工业机器人工业机器人是目前最常见的机器人系统类型之一。
它们通常由多个关节组成,可以根据需要进行自由运动。
随动控制技术可以使工业机器人遵循预定的轨迹进行运动,并对传感器获取的力和力矩进行反馈控制。
这样,工业机器人可以更精确地完成复杂的操作,如焊接、喷涂和装配等。
2. 医疗机器人医疗机器人是一种特殊的机器人系统,主要用于进行手术和治疗。
随动控制技术可以使医疗机器人根据医生的指令和手势进行运动,并对传感器获取的数据进行反馈控制。
这样,医疗机器人可以更精确地进行手术和治疗,减少手术时间和风险。
3. 服务机器人服务机器人是一种新兴的机器人系统类型,用途非常广泛。
它们通常被设计成人形外观,可以与人类进行交互。
随动控制技术可以使服务机器人更加灵活地进行运动,避免碰撞和伤害等情况。
4. 农业机器人农业机器人主要用于农业生产中的各种操作,如种植、浇水、收割等。
随动控制技术可以使农业机器人自动跟踪作物的生长状态,进行准确而高效的操作。
机器人控制理论与应用

机器人控制理论与应用机器人已经成为现代社会中不可或缺的一部分,在工业生产、医疗保健、军事应用等多个领域发挥着重要的作用。
而机器人的控制理论和应用则是保证机器人能够准确、高效地完成各种任务的核心。
本文将从机器人控制理论的基础知识、不同控制方法的应用以及机器人控制在不同领域的案例进行探讨。
一、机器人控制理论的基础知识1. 机器人的结构和运动机器人的结构包括机械结构和电子结构两部分。
机械结构决定了机器人的外形和可移动性,而电子结构则负责控制机器人的运动和执行任务。
机器人的运动通常包括平移、旋转、转动等多种形式。
2. 接口和传感器技术机器人控制需要通过接口与机器人进行通信和控制。
常见的接口技术包括串口、并口、以太网等,并需要传感器技术来获取机器人周围环境的信息。
传感器技术在机器人控制中起着至关重要的作用,可以感知到机器人周围的物体、距离、温度等重要参数。
二、不同控制方法的应用1. 开环控制开环控制是最简单直接的控制方法,通过事先设定好的控制信号,直接驱动机器人执行任务。
这种控制方法适用于对精度要求相对较低的应用,在工业生产线上常见。
2. 闭环控制闭环控制是一种反馈控制方法,通过传感器获取机器人当前状态,并根据状态信息对机器人进行调整和修正。
闭环控制可以提高机器人的准确性和稳定性,应用广泛,如自动驾驶汽车、无人机等。
3. 自适应控制自适应控制是一种智能化的控制方法,能够根据机器人和环境之间的相互作用来动态调整控制参数。
这种控制方法适用于环境变化较大或任务要求不断变化的情况,提高了机器人的适应性和灵活性。
三、机器人控制在不同领域的应用案例1. 工业生产机器人在工业生产中的应用广泛,例如自动化装配线的各个环节、焊接、喷涂等作业任务。
通过先进的机器人控制技术,可以实现高速、高效、高精度的生产,提高生产效率和质量。
2. 医疗保健机器人在医疗保健领域的应用也越来越多,例如手术机器人可以协助医生进行微创手术,提高手术精度和减少创伤。
模型参考鲁棒控制及其应用研究

模型参考鲁棒控制及其应用研究模型参考鲁棒控制及其应用研究摘要:本文旨在探讨模型参考鲁棒控制(Model Reference Robust Control,MRRC)以及其应用的研究现状和发展趋势。
本文首先介绍了MRRC的基本概念、原理和特点,分析了其与传统控制方法的区别和优势。
其次,本文阐述了MRRC在控制系统中的应用及其实现方法,包括了多种控制结构和优化算法,并重点介绍了MRRC在航空、电力等领域中的应用和研究进展。
最后,本文提出了MRRC在未来的发展方向和应用前景,并指出其在工业控制、自动化领域中的应用前景十分广阔。
关键词:模型参考鲁棒控制,控制系统,优化算法,航空,电力。
1. 引言随着计算机控制技术和电子技术的发展,控制科学成为了一个独立的学科,各种新的控制方法和算法得到了广泛的研究和应用。
模型参考鲁棒控制(Model Reference Robust Control,MRRC)是其中一种重要的控制方法,以其精确的控制效果和对于各种不确定性因素的鲁棒性,被广泛应用于机械、航空、电力等领域。
2. MRRC的基本概念和原理MRRC是一种模型预测控制(Model Predictive Control,MPC)的变体,其基本思想是将一个受控系统建模为一个参考模型和控制模型两部分,通过不断调整控制模型的参数,使其输出与参考模型的输出相同,从而实现对系统的控制。
MRRC可以有效地处理各种不确定性因素,包括模型不准确、外部扰动、不确定性、干扰等因素,提高了控制系统的稳定性和精度。
3. MRRC在控制系统中的应用在控制系统中,MRRC主要应用于非线性、多变量、时变等问题,可以有效地处理各种不确定性因素,提高系统的控制性能。
MRRC的具体实现方式包括传统的PID控制、模型预测控制(MPC)、自适应控制、鲁棒控制等多种结构和方法。
在航空、电力等领域中,MRRC可以有效地控制倾斜旋翼飞行器、非线性电力系统等复杂系统,具有广阔的应用前景。
深度强化学习在机器人控制中的应用

深度强化学习在机器人控制中的应用在当今科技飞速发展的时代,机器人技术的进步令人瞩目。
而深度强化学习作为一种强大的机器学习方法,正在为机器人控制领域带来革命性的变化。
想象一下,一个机器人能够自主地学习如何在复杂的环境中行动,如何与周围的物体和人类进行交互,而不需要人类程序员为每一个可能的情况编写详细的指令。
这就是深度强化学习在机器人控制中所展现的魅力。
深度强化学习的核心思想是让机器人通过与环境的不断交互来学习最优的行为策略。
它结合了深度学习的强大感知能力和强化学习的决策能力。
深度学习部分负责从传感器数据中提取有意义的特征,而强化学习则根据这些特征和奖励信号来优化机器人的动作选择。
那么,深度强化学习在机器人控制中的具体应用有哪些呢?首先,在工业机器人领域,它可以用于优化机器人的装配、搬运等操作。
传统的工业机器人通常按照预设的程序进行重复的动作,但在面对复杂多变的生产环境时,其灵活性和适应性就显得不足。
通过深度强化学习,机器人能够根据实时的环境信息和任务需求,自主调整动作的速度、力度和路径,从而提高生产效率和质量。
例如,在汽车生产线上,机器人需要将各种零部件准确地安装到车身。
深度强化学习可以让机器人学会根据零部件的形状、位置和装配要求,选择最合适的抓取方式和安装角度,避免出现错误和碰撞。
其次,在服务机器人领域,深度强化学习也有着广泛的应用前景。
比如,家庭服务机器人需要学会如何在不同的房间中导航,避开障碍物,完成清洁、送餐等任务。
通过与家庭环境的反复交互和学习,机器人能够逐渐掌握最优的行动策略,更好地为人们服务。
在医疗领域,机器人辅助手术是一个重要的应用方向。
深度强化学习可以帮助手术机器人更加精确地操作器械,根据患者的身体状况和手术进展实时调整动作,减少手术风险和创伤。
然而,要将深度强化学习应用于机器人控制,并不是一件简单的事情。
其中面临着许多挑战。
首先是数据问题。
深度强化学习需要大量的训练数据来学习有效的策略。
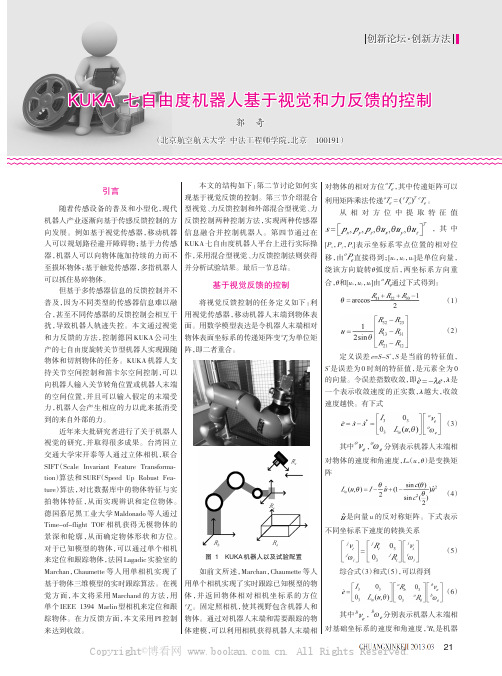
KUKA七自由度机器人基于视觉和力反馈的控制
交通大学宋开泰等人通过立体相机,联合
SIFT(Scale Invariant Feature Transforma⁃
tion)算法和 SURF(Speed Up Robust Fea⁃
ture)算法,对比数据库中的物体特征与实
拍物体特征,从而实现辨识和定位物体。
德国慕尼黑工业大学 Maldonado 等人通过
向发展。例如基于视觉传感器,移动机器 信息融合并控制机器人。第四节通过在
人可以规划路径避开障碍物;基于力传感 KUKA 七自由度机器人平台上进行实际操
器,机器人可以向物体施加持续的力而不 作,采用混合型视觉、力反馈控制法则获得
至损坏物体;基于触觉传感器,多指机器人 并分析试验结果。最后一节总结。
可以抓住易碎物体。 但基于多传感器信息的反馈控制并不
速度 的关系。从机器人动力学模型可以 分到两个垂直的空间。这样视觉反馈控制
垂直方向的分量 K(c z)=1000 N/m,那么机 器人直接施力的作用等同于机器人末端移 动到水平平面下 0.01 米处,但是实际中平 面是不可移动的,假定机器人欲移动到平 面下 0.01 米处,结果机器人末端接触到平 面后会产生一个 10 牛顿等同的力。
Time-of-flight TOF 相机获得无模物体的
景深和轮廓,从而确定物体形状和方位。
对于已知模型的物体,可以通过单个相机 来定位和跟踪物体,法国 Lagadic 实验室的
图 1 KUKA 机器人以及试验配置
Marchan,Chaumette 等人用单相机实现了
如前文所述,Marchan,Chaumette 等人
(1)
(2)
定义误差 e=S-S*,S 是当前的特征值,
S*是误差为 0 时刻的特征值,是元素全为 0
《机器人控制的实际应用》思考题与习题
哈工大机电工程学院硕士研究生课程《机器人控制的实际应用》课程学习指导、思考题与习题哈工大机电工程学院机械设计系仿生仿人机器人及其智能运动控制研究室 教授、博导 吴伟国 编写 2009 年 9 月第一部分:学习指导第一章 绪论——机器人操作臂理论与技术基础概述一、教学目的和教学要求通过本章学习, 重点掌握本课程研究的工业机器人操作臂在目前机器人技术 发展概况、 本课程所讲述的工业机器人操作臂所处的应用技术较成熟的第 2 代机 器人位置、机器人操作臂的机构构成、机器人控制所需的基本方法概述、本课程 内容的构成。
二、教学内容和重点知识解析主要讲授:机器人操作臂理论与技术基础概述 重点知识解析: 1、机器人操作臂的发展现状综述; 2、机器人操作臂的基本构成; 3、机器人操作臂的基本控制方法(本课程内容的构成)第二章机器人操作臂运动学一、教学目的和教学要求通过本章学习,重点掌握机器人操作臂机构的构成、位置表示、坐标变换、 正运动学和逆运动学等机器人操作臂控制所需的基础知识, 从而通过本章学习达 到将机器人操作臂末端操作器运动与各关节运动之间的关系上升到位置表示、 数 学关系表达、求解方法的理论程度,为实际的编程做好理论准备。
要求学员具备 矢量、矩阵等线性代数基础、机械原理有关机构、运动副、自由度等基本概念和 基础知识。
二、教学内容和重点知识解析-11主要讲授:机器人操作臂运动学的基本概念、分析方法、逆运动学求解方法 重点知识解析: 1、机器人机构与位置、姿态表示:关节、自由度、机构、末端操作器位姿; 2、坐标系的表示和坐标变换:各种坐标系表示、回转/平移/齐次变换矩阵、 D-H 参数法及关节坐标系建立; 3、正运动学:什么是正运动学(或运动学正问题)?矩阵齐次变换法、解 析法、实例; 4、逆运动学;何谓逆运动学(或运动学逆问题)?几何法、矩阵齐次变换 法、实例等。
第三章机器人操作臂动力学一、教学目的和教学要求通过本章学习,重点掌握机器人动力学研究的意义和必要性、用拉格朗日方 程推导机器人操作臂的运动方程式、机器人操作臂动力学的牛顿-欧拉法等主要 内容,为设计基于模型的控制器做好理论准备。
最新计算机控制技术及其应用(丁建强-任晓-卢亚萍)课后答案

第1章概述1-2第2章计算机控制系统的理论基础 .......................................................................... 2-1第3章数字控制器的设计与实现 ............................................. 3-1第4章控制系统中的计算机及其接口技术 ..................................... 4-1第5章计算机控制系统中的过程通道 ......................................... 5-1第6章控制系统的可靠性与抗干扰技术 ....................................... 6-1第7章控制系统的组态软件 ................................................. 7-1第8章 DCS集散控制系统.................................................... 8-1第9章计算机控制系统的解决方案 ........................................... 9-1第10章计算机控制技术在简单过程控制中的应用 ............................. 10-1第11章计算机控制技术在流程工业自动化中的应用 ........................... 11-1第1章概述1.什么是自动控制、控制系统、自动化和控制论?[指导信息]:参见1.1自动控制的基本概念。
自动控制(autocontrol):不用人力来实现的控制,通常可用机械、电气等装置来实现。
通常相对手动控制而言。
控制系统(control system):通过控制来实现特定功能目标的系统。
而系统(system)是由相互联系、相互作用要素组成的具有一定结构和功能的有机整体。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
和 q 的部分分别用a和v进行替代; ◇ 右边前三项为公称模型 q
~ ~ ,实际上相当于PD控制器。 ◇ 第4项 Kr KΛq Kq
公称模型:
ˆ (q, q ˆ (q)q C )q g ˆ (q) M
ˆ(q, q ˆ (q)u h ) M
由(7.9)和(7.14)得:
(7.14) ( 6.14)
ˆ(q, q ˆ (q)u + h + h(q, q ) = M ) M (q)q
由(7.22) 得:
(7.22) (6.22)
ˆ (q, q ˆ (q)u M 1 (q)[h M 1 (q) M ) - h(q, q )] q ~ 1 1 ˆ )] u [( M (q) M (q) - I )u M (q)h (q, q
v p
( 6.20) (7.19)
●关于增益矩阵Kp、Kv及闭环系统的稳定响应
~ ~ ~=0 + K q +K q 闭环系统 : q v p
(7.19)
特别地若按(7.18)式选择增益矩阵,闭环系统(7.19)的行为受 各个关节的线性2阶系统下式(7.20)支配: 因此,复杂的机器人控制系统的响应可基于熟知的线性 2 阶 系统的响应特性很容易地确定。根据 2 阶系统的响应知识, 若分别合理地选择衰减比 ξi 和固有角频率 ωi ,可得到闭环系 统(7.19)期望的稳定响应。
g(q) τ K p (q q d ) K v q 考虑与轨迹追踪控制同样的问题,让关节变量q与关节速度
追从目标轨迹q d 与目标速度变量q d,由偏差矢量 : 变量q ~ q q d 和q ~ q q d 定义变量r : q
~ ~ q r q
7.1 机器人动力学模型和不确定性
7.1.1 n自由度机器人操作臂的动力学方程式回顾:
◆各关节皆是各自独立驱动的且全为回转关节的情况下 的动力学方程式:
+ C (q, q )q + g(q) = τ M (q)q
其中:q [q1, ,qn ] τ [ 1, , n ] M (q) n n对称且正定的惯性 )q 表示离心力和科氏力n 1矢量 C (q, q g (q) - 表示重力项的n 1矢量
(7.1)
(7.9)
(7.10)
与公称模型(7.10)相应的基于逆动力学计算的控制: ˆ (q, q ˆ (q ) u + h ) τ=M (7.14)
ˆ(q, q ˆ (q)q + h ) = τ M
ˆ(q, q ˆ (q) u + h ) τ=M
(7.10)
(7.14)
称为新的控制输入—— u [u1 , , un ]T 为n 1矢量 (7.14)式被称为“计算力矩法” 将(7.14)式带入(7.10)式中可得:
(7.58) ( 6.58)
定义好上述辅助变量后就可以进一步研究本节中作为基本控 制方式的“基于被动特性的公称控制”问题。
●Байду номын сангаас于被动特性的公称控制
ˆ (q, q)v g ˆ (q)a C ˆ (q) Kr τM
式中:
(7.59) ( 6.59)
◇ K=diag{k1,…,kn}, ki>0, i=1,…,n,为n×n的对角且正定矩阵。
(7.44)
基于“逆动力学”的Robust控制
~ ~+u ~] + h -K q ˆ(q, q ˆ (q)[q d - K v q ) τ=M p
(7.44)
7.3 基于被动特性的Robust Control
7.3.1 基本控制方式和不确定性的影响
( 1)基本控制方式——公称控制方式
●准备工作——辅助变量
●自身的机械制造、装配误差导致参数的不确定性 ●传动系统的刚度 ●齿轮传动的回差 ●啮合齿面间摩擦、轴承摩擦 ●机器人在操作过程中所受不可预知的外部扰动等等。
模型存在的不确定性是机器人操作臂动力学建模中所不可避 免的。
C (q, q )q g (q ) M (q ) q
~ ~) h -K q ˆ(q, q ˆ (q)(q d - K v q ) τM p
u q
将(7.17)回代到(7.16)中有:
(7.21) ( 6.21)
( 6.16) (7.16)
~ ~ 0,即有: K q q d ) K v q (q p ~ ~ ~0 K q K q q
(7.1)
◆考虑摩擦和外部扰动的情况下的动力学方程式:
+ C (q, q )q + g (q) + Fv q + f d (q ) + τ d = τ M ( q )q
)q 、g (q) - 同前 其中:q、 τ、 M (q)、C (q, q Fv 表示粘性摩擦项系n n对角矩阵 ) - 表示动摩擦项的n 1矢量 f d (q τ d 表示n 1的外部扰动矢量
(7.3)
有界性:存在适当的M m、M
M
,有: 、CM 、GM,对于所有的q、 q
0 < M m ≤ M ( q ) ≤M M ) ≤CM q C (q, q g (q) ≤GM
(7.4) (7.5) (7.6)
7.1.2 模型的不确定性
◆ 模型的不确定性:完全描绘出现实物理世界中的实际 机器人动力学的精确模型永远是不可能的。 考虑实际机器人中存在不确定性的现实问题:
机器人控制的实际应用
任课教师:
吴伟国
机电工程学院机械设计系 2009-07-19
第七章 Robust控制
引言:
●对于基于模型的机器人控制而言: Robust Control是为合理地 处理模型不确定性问题的一种控制方法,使得即使模型存在不确 定性,也能保证系统整体稳定性; ● 7.1: Robust Control所需要的机器人动力学的特征;机器人动 力学模型的不确定性的讨论;为什么需要 Robust Control; ● 7.2:基于逆动力学的 Robust Control——利用逆动力学,对机 器人动力学进行线性反馈; ● 7.3:基于被动特性的 Robust control——基于机器人动力学物 理特征的被动特性; ● 7.4: SICE-DD机器人操作臂的 Robust控制系统设计与实验
~ 1 ~ ~ ~ )] η ((7.27) q K v q K p q [ E (q)u M (q)h (q, q 6.27)
~ 1 ~ ~ ~ )] η ((7.27) q K v q K p q [ E (q)u M (q)h (q, q 6.27)
((7.23) 6.23)
(7.24) ( 6.24)
u η q
d ~ ~η q q K q K q 将(7.17)代入(7.24)得: v p
~ ~ (7.17) -K q d - K v (q -q d ) - K p (q - q d ) q d - K v q uq (6.17) p
(7.2)
◆ 作为机器人控制基本的动力学特征:
M (q)的正定性: M (q)是对称且正定的矩阵
(q) 2C (q, q )的反对称性 — 适当地给定C (q, q )则其为反对称矩阵 M
• 参数显现的线性 : + C (q, q )q + g (q) = Y (q, q , q )θ = τ M (q )q
0 < M m ≤ M ( q ) ≤M M (7.4) (7.5) (7.6) ) ≤CM q C (q, q g (q) ≤GM
(6.8) (7.8)
可知:对公称模型(7.7)可以考虑 模型不确定性(7.8)的机器人的 Robust控制系统的设计。
由有界性
7.2 基于逆动力学的Robust Control
ˆ (q, q ˆ (q)u M 1 (q)[h M 1 (q) M ) - h(q, q )] q ~ 1 1 ˆ )] u [( M (q) M (q) - I )u M (q)h (q, q ~ 1 )] u [ E (q)u M (q)h (q, q
7.2.1 基本控制方式和不确定性的影响
( 1)基本控制方式
●基本控制方式——公称控制
+ C (q, q )q + g(q) = τ M (q)q ) C (q, q )q g(q) 为使符号简洁,令h(q, q + h(q, q ) = τ 则(7.1)式为:M (q)q ˆ(q, q ˆ (q)q + h ) = τ 其公称式为:M
讨论:
~ ) 0,则η 0 闭环系统(6.27) (7.27) 0 如果E (q) 0, h (q, q
为达到即使η 0,即存在不确定量η也能使其不影响 闭环系统的稳定性和相应特性,需要研究机器人操作 臂的Robust控制。
7.2.2 由李亚普诺夫方法的Robust控制
ˆ (q)(q - u) = 0 M
ˆ (q)是正定的 由于M
(7.15)
(7.16)
= u q
因此,以u为输入量,决定选择如下的PD控制:
d - K v (q -q d ) - K p (q - q d ) u=q ~ ~ -K q d - K q =q
v p
(7.17)
~ ~ q r q
进一步定义如下两个辅助矢量 :
d ~ v q Λq d ~ a v q q
(7.56) (6.56)
((7.57) 6.57)