码头集装箱锁销自动化拆装技术研究
桥式抓斗卸船机的自动化技术研发与应用

桥式抓斗卸船机的自动化技术研发与应用桥式抓斗卸船机是一种广泛应用于港口、码头等物流枢纽的重要设备,主要用于将散装货物从船只卸下并输送至储料场或装车装置。
随着自动化技术的不断发展,桥式抓斗卸船机的自动化技术研发与应用也逐渐成为趋势。
以下是对桥式抓斗卸船机自动化技术研发与应用的详细介绍:1. 自动化控制系统:桥式抓斗卸船机的自动化控制系统是实现卸船过程自动化的关键。
该系统主要包括控制柜、PLC(可编程逻辑控制器)、传感器、操作台等组成部分。
其中,控制柜主要负责接收操作台指令,并控制抓斗的升降、开合、旋转等动作;PLC则负责监控整个卸船过程的运行状态,并通过传感器获取相关数据,如抓斗内物料的重量、抓斗的位置、设备的运行状态等,从而实现自动化控制。
2. 智能识别与调度系统:智能识别与调度系统是桥式抓斗卸船机自动化的重要组成部分,主要用于识别和调度船只、货物和设备。
该系统主要包括图像识别、目标跟踪、路径规划、任务调度等模块。
通过摄像头等传感器获取船只、货物和设备的图像信息,并通过图像识别技术对货物进行分类和定位。
同时,通过目标跟踪技术对船只、货物和设备进行实时监控,实现动态调度。
此外,路径规划和任务调度模块还能根据现场环境和运行状态,自动规划设备运行路径和调度任务,提高卸船效率。
3. 自动纠偏与防摇系统:桥式抓斗卸船机在卸船过程中容易受到风浪、船只晃动等因素的影响,导致设备发生偏移或摇摆。
为了解决这一问题,自动纠偏与防摇系统被广泛应用于桥式抓斗卸船机的自动化技术中。
该系统主要包括传感器、控制器、执行器等组成部分。
通过传感器获取设备的位置、姿态等信息,并通过控制器计算出设备实际位置与设定位置之间的偏差,进而控制执行器进行纠偏和防摇操作。
此外,自动纠偏与防摇系统还能根据现场环境和运行状态,自动调整设备的工作模式,提高卸船稳定性和安全性。
4. 智能故障诊断与维护系统:智能故障诊断与维护系统是桥式抓斗卸船机自动化的重要保障措施,主要用于检测和诊断设备故障,并实现自动维护。
港口集装箱吊具的形式和应用

图2吊粱式集装箱吊具 f 2)主从式吊具(见图3{基本吊具为20危集装 箱专用吊具,能直接起吊20fI集装箱。当起吊40ft集 装箱时,将40ft集装箱专用吊具的箱角件与20ft基本 吊具的转销连接,并通过20ft吊具上的液压装置来实 现40 ft吊具上的各个动作。主从式吊具也可以设计 成由其他规格的专用吊具与基本吊具配套使用,实现 吊装其他规格的集装箱。主从式吊具的更换比吊梁式 吊具更为方便,但质量也较重。
26集装万箱方化数200据7 09
上最广泛采用的集装箱吊具。
2常用的集装箱吊具 2.1 4吊点集装箱子母式吊具
子母式吊具由子母吊架结构、转锁装置、导向装 置和液压系统等组成。4吊点子母式吊具的起吊点由 4组滑轮构成,吊具通过4组钢丝绳与起重机相连。
子母式吊具采用子母架结构设计,母架适用于20 I=t集装箱装卸作业,通过锁拄吊具子架可以完成40 fI 集装箱的装卸作业。子母吊具的电气部分由母架控制 箱、子架控制箱、快接式连接电缆和信号开关组成,专 用的接插件可靠地保证了电气控制在母架和子架之间 快速有效地转换。液压部分的泵站在母架上,在母架 和子架之间采用快速接头,从而保证子架转锁装置的 正常动作。
自动化集装箱码头装卸工艺系统比较研究_郑见粹

图 1 岸桥与 AGV、ARMG 装卸工艺
国际自动化集装箱码头的发展大致可以分为 三个阶段,根据其设备自动化和管控系统的技术 水平也可称为 3 代自动化集装箱码头。各代典型 自动化码头的工艺设备情况如下:
第 1 代自动化集装箱码头,以荷兰鹿特丹港 ECT 码头Ⅰ期和Ⅱ期为代表。码头前沿装卸船设 备采用半自动化岸边集装箱起重机,水平运输设 备采用自动导引车(AGV),堆场设备采用自动轨道 式集装箱门式起重机(ARMG),AGV 及 ARMG 为无 人化操纵。此外,新加坡港 PSA 码头,中国香港 HIT 码头等,可以基本实现堆场设备自动化运行, 也可作为第 1 代自动化集装箱码头。
而 在 堆 场 的 另 一 侧 (陆 侧 ), 提 箱 和 送 箱 的 集 装 箱 卡 车 可 以 通 过 一 条 4 车 道 75 m 长 的 道 路 直 接 进 入 相 应 的 堆 垛 处 进 行 装 卸 箱 作 业 。 CTA 码头堆场陆侧后方设置火车作业区,有 6 条平
行 的 火 车 装 卸 作 业 车 道 , 长 700 m, 配 置 4 台 跨 6 条车道的轨道式集装箱门式起重机进行火 车装卸作业。
⑤上述各动作逆行,完成集装箱从堆场到船 的装船流程。
这种装卸工艺系统要求接送箱集卡不进入堆场箱 区,而在堆场一端交接,以利堆场实现完全自动化。
上海振华港机(集团)推出的这套自动化集装箱 码头装卸工艺系统没有采用国际上惯用的内燃驱 动的 AGV 地面运输方式,而代之以电动轨道运输 设备,在节能减排和使用可靠性方面都有突出的
妈湾港集装箱自动化码头装卸工艺研究

妈湾港集装箱自动化码头装卸工艺研究◎ 陈辉 深圳海勤工程管理有限公司摘 要:随着港口航运的发展和港城融合的需要,越来越多建设年代较早、泊位等级低、技术落后、环境不友好的老码头进入改造高峰期。
利用这些老码头优越的区位优势和岸线资源进行岸线整合和专业化改造,使其脱胎换骨为一个专业化、自动化、绿色环保低碳的现代化港区,对提高岸线资源利用率和促进港口高质量发展具有重要意义。
本文对传统散杂货码头——妈湾港改造为20万吨级集装箱自动化码头的装卸工艺与布置进行了研究,结合项目特点和业主建设要求重点研究了水平运输工艺和堆场工艺,确定了5G+自动驾驶集卡工艺的自动化集装箱港区总体布置技术,通过比选确定了内外集卡交通隔离及交通组织模式,解决了港内无人集卡与港外集卡混合作业的难题。
关键词:妈湾港;集装箱自动化码头;码头装卸工艺1.妈湾港改为集装箱码头的背景1.1妈湾港简介妈湾港位于深圳西部,紧邻城市中心。
码头建于1986年,有3个3.5万吨级、2个5千吨级和1个2千吨级泊位通用泊位,主要从事钢材、粮食、矿砂、木材、散装水泥、花岗岩等散杂货装卸堆存业务,是深圳西部港区散杂货主要作业区之一。
随着深圳前海蛇口自贸区的设立,妈湾港从事的通用散杂货业务已不适应该区域的功能定位及区域发展。
根据前海蛇口自贸区综合规划及招商局港口的战略部署,利用妈湾港区优越的区位优势及建港条件,将现有妈湾港区1#-4#通用泊位整体升级改造为2个20万吨级的自动化集装箱码头,年设计吞吐量近期94万TEU。
1.2改造总体要求1)按照招商港口要求年投资回报率不低于10%。
2)在集装箱码头工艺技术中保持适度领先。
3)建设具有招商特色的智慧型集装箱码头。
2.自动化集装箱码头发展情况自动化是集装箱码头技术发展的方向,随着科学技术的发展和国内劳动力成本的上升,我国也加快了自动化集装箱码头建设的步伐。
自2016年3月厦门远海自动化码头建成以来,洋山四期、青岛前湾四期、天津五洲国际等多个自动化集装箱码头相继建成运营,此外广州南沙四期、太仓四期、天津北疆C段、钦州大榄坪等自动化集装箱码头正紧锣密鼓地建设中,我国已一举成为全球拥有自动化集装箱码头数量最多的国家。
自动化集装箱码头新型转锁拆装工艺设计
自动化集装箱码头新型转锁拆装工艺设计自动化集装箱码头在节省码头人力成本、提高港口通过能力等方面具有明显优势,是未来港口发展的必然趋势。
自从1993年荷兰鹿特丹港建成世界上首个自动化集装箱码头以来,随着技术的不断发展,自动化集装箱码头呈现快速发展趋势。
截至2021年底,世界已建和在建自动化集装箱码头共计32个,自动化码头成为未来集装箱码头发展新方向。
在现有装卸船作业工艺下:装船作业时,需要在集装箱底部安装转锁后再装船;卸船作业时,需要将集装箱底部转锁拆下后才能将卸船集装箱放置在地面上,以免造成转锁损坏。
目前,由于人工跨运车工艺具有效率高、投资成本低等优点,被广泛应用于自动化集装箱码头岸边至堆场的集装箱双向水平运输作业。
由于跨运车在水平运输时无须带锁着箱,为与岸桥配合作业,集装箱转锁拆装成为跨运车作业工艺中亟待解决的技术难题。
本文在分析自动化集装箱码头转锁拆装工艺发展现状的基础上,提出新型转锁拆装工艺方案。
1 自动化集装箱码头转锁拆装工艺发展现状1.1 自动化集装箱码头工艺系统概况自动化集装箱码头装卸作业工艺主要有“自动化轨道吊+自动导引车”“自动化轨道吊+人工跨运车”“带外伸臂轨道吊+集卡”等典型形式。
目前新建自动化集装箱码头一般采用“自动化轨道吊+自动导引车”或“自动化轨道吊+人工跨运车”装卸作业工艺。
由于“带外伸臂轨道吊+集卡”装卸作业工艺存在外集卡在场内定位困难等问题,其应用范围局限于亚洲部分自动化集装箱码头。
在“自动化轨道吊+人工跨运车”装卸作业工艺下,人工跨运车无须与其他起重设备进行对箱交接作业,可以骑跨在集装箱上方,利用起升机构自行提取或放置集装箱,从而实现各作业环节间的解耦。
人工跨运车工艺一般不采用双小车岸桥,因为自动运行的岸桥后小车与岸桥下方人工跨运车的配合作业难度较大,存在较高安全风险。
鉴于此,采用人工跨运车工艺的自动化集装箱码头多采用单小车岸桥,在岸桥岸侧腿内设中间平台,以便进行转锁拆装和箱号扫描作业。
时代楷模先进人物事迹材料

时代楷模先进人物事迹材料时代楷模先进人物事迹材料五篇“我们从零起步,翥的是做到极致的工匠精神和群策群力的团队协作,每一次突破都值得铭记。
”张连钢说:“世界纪录不是任何人施舍给我们的,是全体队员不断超越自我、拼命干出来的!” o以下是话和大家分享的时代楷模先进人物事迹材料资料,提供参考,欢迎参阅。
时代楷模先进人物事迹材料一20xx年5月11日,全自动化集装箱码头在青岛港诞生,开港作业便达到单机效率26. 1自然箱/小时,之后这个世界纪录被6次刷新。
2021年年底,单机效率已增至47. 6自然箱/小时。
20xx年11月,青岛港自动化码头二期“全球首个5G智慧码头”开港运营,再次以“中国速度”震惊世界航运界。
“我们从零起步,靠的是做到极致的工匠精神和群策群力的团队协作,每一次突破都值得铭记。
”张连钢说:“世界纪录不是任何人施舍给我们的,是全体队员不断超越自我、拼命干出来的!”“仅流程测试案例就编写了5000多个,反复测试十儿万次。
” “连钢创新团队”项LI经理窦亮说。
在一次测试中,他们发现某处系统功能出现异常,但疑点有数白个,大家按流程一点点回溯,连续一周每天干到凌晨,最终找到了问题点。
这样的例子还有很多。
有段时间,AGV(自动导引车)“死锁”情况频繁出现,李永翠和同事们用了儿个月,分析了上万条工作日志,从中归纳了十儿种“死锁”类型,最终成功“解锁”;负责操作的朱文峰、王吉升、隋晓等对100多个流程反复修改十儿稿;负责作业的李波、管廷敬、耿卫宇等做了40多个闸口方案……开港至今,“连钢创新团队”推出了一连串耀眼的“全球首创”:全球首次研制成功机器人自动拆装集装箱扭锁;全球首次研制成功轨道吊防风“一键锚定”装置;全球首创自动导引车循环充电技术;全球首个氢+3G智慧码头……而且,经过xx3次的动态优化,自动化码头管控系统已经越来越“聪明”。
外行看热闹,内行看门道。
作业组负责人李波清楚地记得,自动化码头运行后不久,鹿特丹世界门户码头的考察团来到青岛港,提出要到自动化码头作业现场看看,并且要求拍照、录像,很明显就是想检验青岛港自动化码头的“成色”。
集装箱码头装卸工艺方案有那几种各有什么特点
集装箱码头装卸工艺方案有那几种各有什么特点在这个充满挑战和机遇的时代,集装箱码头装卸工艺方案的优化与创新成为行业发展的关键。
作为一名有着十年方案写作经验的大师,我下面就来为大家详细介绍几种常见的集装箱码头装卸工艺方案及其特点。
一、传统装卸工艺1.特点传统装卸工艺主要包括堆场装卸、岸边装卸和水平装卸三种方式。
这种工艺方案历史悠久,操作相对简单,适用范围广泛。
2.特点分析(1)堆场装卸:将集装箱堆放在堆场内,通过叉车、堆高机等设备进行装卸作业。
这种方式适用于港口集装箱吞吐量较小、场地条件有限的情况。
(2)岸边装卸:利用岸边起重机进行装卸,适用于港口码头条件较好,且集装箱吞吐量较大的情况。
二、自动化装卸工艺1.特点自动化装卸工艺主要包括自动化岸边装卸、自动化堆场装卸和自动化水平装卸三种方式。
这种工艺方案以高科技设备为支撑,实现了装卸作业的高度自动化。
2.特点分析(1)自动化岸边装卸:利用自动化岸边起重机进行装卸,具有效率高、作业准确度高等优点。
(2)自动化堆场装卸:通过自动化堆高机、自动导引车等设备进行装卸,实现了堆场内集装箱的自动化搬运。
(3)自动化水平装卸:采用自动化皮带输送机、自动化轨道式装卸车等设备,实现了集装箱在港口内部的自动化输送。
三、混合式装卸工艺1.特点混合式装卸工艺是将传统装卸工艺与自动化装卸工艺相结合的一种方案。
这种工艺方案具有灵活性高、适应性强等特点。
2.特点分析(1)灵活性高:混合式装卸工艺可以根据港口实际情况,灵活采用传统和自动化设备进行装卸作业。
(2)适应性强:适用于不同规模、不同条件的港口,尤其是集装箱吞吐量较大的港口。
(3)效率提升:通过将传统和自动化设备相结合,提高了装卸作业的效率。
四、绿色装卸工艺1.特点绿色装卸工艺是一种以环保、节能、低碳为核心理念的装卸工艺方案。
这种工艺方案主要包括绿色装卸设备、绿色装卸流程和绿色装卸管理三个方面。
2.特点分析(1)绿色装卸设备:采用节能、低碳的装卸设备,如电动叉车、太阳能照明等。
分阶段实施集装箱码头全自动化系统在通州湾新出海口起步港区的应用

港口科技•智慧港口分阶段卖施集装编码头全自动化糸统在通州0青新出海口起步港区的应用季红军,范从军(南通港(港口)集团有限公司,江苏南通226006)摘要:从建设自动化集装箱码头的角度出发,以南通港通州湾新出海口起步港区吕四作业区#8〜#9码头工程为例,梳理该码头工程设计方案的关键点,总结分析决策过程,对全自动化集装箱码头分阶段实施方案展开研究和探讨,为其他类似工程参考提供思路和经验。
关键词:港口;南通港;全自动化;集装箱码头;分阶段实施0引言随着《交通强国建设纲要》的印发实施,智慧交通的的理念越来越多地运用到水运工程建设中。
作为全球航运体系中的重要环节,集装箱码头的自动化已成为一种趋势』上海洋山四期、青岛前湾四期和厦门远海等自动化集装箱码头的建成为集装箱码头全自动化的探索开拓道路。
随着5G 通信技术的不断进步,未来的集装箱码头将有更多的技术路径选择。
目前,自动化集装箱码头最前沿的水平运输方式是使用无人集卡,但由于技术和法规的限制,仍处于试验阶段。
针对无人集卡尚不能大规模投入使用的问题,本文研究集装箱码头分阶段实施全自动化问题。
1工程概况南通港吕四作业区#8~#9码头工程拟在吕四作业区环抱式港池西港池南侧建设2个10万吨级集装箱泊位,设计年吞吐量140万TEU,码头布置采用满堂式,泊位总长度为812m,纵深620m,主要功能区包括码头前方作业带、重箱堆场、超限箱堆场、空箱堆场、预留堆场、拆装箱区、查验区、调箱门区、集卡缓冲区和进出港闸口等。
南通港吕四作业区#8~#9泊位总平面布置图见图lo2码头自动化程度比选南通港吕四作业区#8~#9码头工程以建设全自动化码头为目标,考虑到新港区航线开发和箱量提升一般都需要时间的积累,综合投资效益分析,码头自动化可以分阶段实施。
总结国内外自动化集装箱码头的建设经验,其自动化程度主要有3个阶段:第1个阶段为堆场自动化,即使用自动化堆场装卸设备(轨道吊、轮胎吊等),码头装卸和水平运输采用常规设备;第2个阶段为码头自动化+堆场自动化,即在第1个阶段的基础上增加码头自动化装卸设备(岸桥),水平运输采用常规设备;第3个阶段为码头自动化+堆场自动化+水平运输自动化,即实现全自动化,水平运输设备也采用自动化设备(智能集卡、AGV、自动化集装箱跨运车等)。
集装箱装卸工艺52页PPT

适用码头:进口重箱量大,出口重箱量小的集装 箱码头。
3、起源于北美西海岸集装箱码头的装卸工艺---底 盘车工艺系统(Straddle Carrier System)
(二)码头前沿(Wharf Surface,Quay Surface, Wharf Frontline)
集装箱码头前沿布置: 集装箱桥吊、轨道
高低压电箱 船用电话接口 桥吊电缆沟 灯塔
(三)堆场(Yard)
1、箱区的分类 出口重箱区---在前方堆场 进口重箱区---在后方堆场
出口中转箱区 中转箱区 进口中转箱区
(六)检查口(Gate House)
俗称“道口”,又称“检查桥”“闸口”“大门”等。 设置地磅,用于集装箱内货物的计量。设置地磅(Truck Scale)目的—保证码头机械和船舶积载的安全性 负责检查: (1)交接集装箱和集装箱货 (2)检查集装箱外表和集装箱铅封是否完好 (3)用地秤对集装箱进行秤重 (4)办理和交接有关货物和集装箱的各种单证(如CLP、 ER) 法律意义:区分码头内外责任的分界点。
集装箱装卸工艺
港口装卸工艺---Technology of Cargo Handing
in Port
什 么 是 港 口 装 卸 工 艺 (Technology of Cargo Handing in Port)? 港口装卸工艺是指在港口实现货物从一 种运载工具(或库场)转移到另一种运 载工具(或库场)的空间位移的方法和 程序。
自动化控制系统在港口散货装卸设备中的应用分析

自动化控制系统在港口散货装卸设备中的应用分析1. 引言1.1 研究背景港口作为国际贸易的重要环节,其装卸效率直接影响着货物的流通速度和成本控制。
随着科技的不断发展,自动化控制系统在港口装卸设备中得到了广泛应用,极大地提高了装卸效率和运作安全性。
目前国内对于自动化控制系统在港口散货装卸设备中的应用研究相对不足,需要进行更深入的探讨和分析。
自动化控制系统能够完全替代人工操作,实现设备的智能化和自动化控制,从而提高作业效率,降低人力成本。
在港口散货装卸设备中,自动化控制系统可以实现集装箱的自动抓取、装卸、堆放等操作,大大减轻了工人的劳动强度,提高了作业效率,减少了装卸时间。
自动化控制系统还能有效减少人为错误,提高作业安全性,保障货物运输的顺畅。
本研究旨在深入探讨自动化控制系统在港口散货装卸设备中的应用情况,并从优势分析、案例分析和发展趋势等方面进行详细论述,旨在为我国港口散货装卸设备的自动化改造提供参考和借鉴,推动港口散货装卸设备的现代化发展。
1.2 研究目的研究目的主要是探讨自动化控制系统在港口散货装卸设备中的应用现状和发展趋势,分析其在提高装卸效率、降低操作成本、保障安全生产等方面的作用。
通过研究,旨在深入了解自动化控制系统在港口散货装卸设备中的应用情况,为港口装卸设备的现代化升级提供理论参考和技术支持。
进一步探讨自动化控制系统在港口散货装卸设备中的优势和不足之处,为相关领域的研究和实践提供指导。
通过本研究,希望能够促进港口装卸设备的智能化发展,提高港口的竞争力和服务水平,推动港口物流行业的可持续发展。
1.3 研究意义自动化控制系统在港口散货装卸设备中的应用具有重要的研究意义。
随着全球贸易的持续增长,港口装卸效率成为提高物流运输效益的关键因素。
自动化控制系统的应用能够提高装卸设备的操作效率和精度,减少人为操作误差,提升装卸作业的效率和安全性。
自动化控制系统能够实现设备的远程监控和管理,提高了港口装卸设备的智能化水平,为港口管理部门提供了更加便捷和高效的管理手段。
传统岸边集装箱起重机自动化远程控制改造优化

传统岸边集装箱起重机自动化远程控制改造优化作者:邱涛林栋李凌凯来源:《集装箱化》2020年第06期岸边集装箱起重机(以下简称“岸桥”)是集装箱码头用于集装箱船装卸作业的专业设备。
在传统岸桥作业过程中,岸桥司机需要高度集中精力地操控岸桥各机构动作,存在工作强度大、工作环境恶劣等问题,容易导致司机疲劳且易引发职业病。
随着远程操控技术的普及,世界各国港口纷纷打造不同作业模式的自动化集装箱码头,将岸桥司机转移到环境舒适的远程控制中心,以降低岸桥司机工作强度,提高岸桥作业效率。
为了适应自动化港口建设的需要,我国诸多集装箱码头着力于传统岸桥的自动化远程控制改造;但受限于传统岸桥(单小车岸桥)的性能及其与自动化作业流程的不兼容,改造后的岸桥在作业效率方面的表现欠佳。
本文提出提升子系统性能、优化自动化作业流程等传统岸桥自动化远程控制改造优化方案,以期提升岸桥自动化作业能力。
1 优化子系统增加子系统是传统岸桥自动化远程控制改造的途径之一,这些子系统包括船型扫描系统(ship profile scanning system,SPSS)、闭路电视监控(closed-circuit television,CCTV)系统、防摇防扭系统、半自动运行系统等。
各子系统相互配合工作是实现岸桥自动化远程控制的基础条件;因此,有必要对子系统实施优化,以满足岸桥自动化作业要求,提升岸桥作业效率。
1.1 增强CCTV系统功能CCTV系统的主要功能是:通过在岸桥各部位配置摄像头,实现岸桥司机对大车运行、作业贝位、吊具全局、俯仰机构运行轨迹及集卡车道的远程监控。
司机在远程操控着箱动作时存在视觉盲区,在距离过远的情况下,还存在无法看清锁孔等问题,给着箱作业造成安全隐患。
据统计,岸桥司机平均着箱耗时为36.5 s,仍有较大的提升空间。
为了提升岸桥司机远程操控着箱能力,在海侧和陆侧理货室上方增设监控摄像头,使司机可以从侧面观察着箱情况;同时,在CCTV系统中增设可编程逻辑控制器(programmable logic controller,PLC)Text插件和TextBar插件。
《海港集装箱码头设计规范》(JTS165—4—2011)(可编辑)

《海港集装箱码头设计规范》(JTS165—4—2011)(可编辑)《海港集装箱码头设计规范》(JTS165—4—2011)JTS中华人民共和国行业标准JTS 165-4-2011海港集装箱码头设计规范Design Code of Container Terminal for Sea Port2011-05-01 实施2011-02-17 发布中华人民共和国交通运输部发布中华人民共和国行业标准海港集装箱码头设计规范JTS 165--4-2011主编单位:中交第一航务工程勘察设计院有限公司批准部门:中华人民共和国交通运输部施行日期: 2011 年5 月 1 日也京.式 il* 砾怡2011 .北京关于发布《海港集装箱码头设计规范》JTS 165-4-2011 的公告2011 年第 7 号现发布《海港集装箱码头设计规范以下简称《规范。
本《规范》为强制性行业标准,编号为 JTS 165-4-2011 ,自 2011 年5 月 1 日起施行。
本《规范》第 1. 0.3 条、第条、第 5. 1. 1 条、第 6. 1. 2 条、第 6. 1.3 条、第 6. 1. 4条、第条、第条、第条、第条、第条、第条、第11. 2. 3 条、第 1 1. 4. 1 条、第 12. 1. 1 条、第 12. 1. 5 条、第条、第条和第黑体字部分为强制性条文,必须严格执行。
本《规范》由部组织中交第一航务工程勘察设计院有限公司等单位编制完成,由部水运局负责管理和解释,由人民交通出版社出版发行。
特此公告。
中华人民共和国交通运输部二0一一年二月十七日制定说明制定说明本规范是在总结近年来海港集装箱码头设计和管理等实践经验的基础上,通过深入地调查研究,经广泛征求有关单位和专家的意见并结合我国水运工程的现状和集装箱码头建设发展的需要制定而成。
主要包括建设规模、总平面布置、装卸工艺、计算机管理及自动化控制、道路和堆场、供电和照明、给排水、消防、环境保护等技术内容。
关于集装箱联动锁杆的研究分析

科技与创新┃Science and Technology&Innovation ·74·2018年第17期文章编号:2095-6835(2018)17-0074-02关于集装箱联动锁杆的研究分析孙海燕,马嘉启,孟庆兵(青岛黄海学院,山东青岛266427;青岛中集集装箱制造有限公司,山东青岛266599)摘要:介绍了散货集装箱门端联动锁杆,对锁杆系统的结构进行了详细说明,对锁杆在开启和关闭时运动的轨迹进行了详细研究。
通过对各个关键节点位置的调整,对锁头开启关闭时运动轨迹进行优化,使得锁头在关闭时,允许门扇自然下垂的角度最大。
这种类型的锁杆应用极为广泛,不仅可以用在散货集装箱上,也可以用在任意从侧部开启的门扇上,且可以通过多个点对门扇进行施力,保证箱体在装货后,门扇受到挤压的情况下,门扇与门框之间的间隙在允许的范围内,防止箱内货物的泄漏。
锁杆系统的研究可以更大程度地提高集装箱在散货类货物运输方面的便捷性,可以为更多的货运提供更为便捷的服务。
关键词:集装箱;联动锁杆;船舶;公路中图分类号:U691.3文献标识码:A DOI:10.15913/ki.kjycx.2018.17.074集装箱是能装载包装或无包装货进行运输,便于用机械设备进行装卸搬运的一种组成工具,广泛地用于全球范围内的港口、船舶、公路等物流系统。
集装箱的种类很多,分类方法也很多。
通常按照所装货物的种类可以将集装箱分为干货集装箱、散货集装箱、液体货集装箱、冷藏箱集装箱以及一些特种专用的集装箱等。
其中,散货集装箱是用以装载粉末、颗粒状货物等各种散装的货物的集装箱。
由于货物形状的不规则性以及货物种类的不确定性,散货集装箱在开启和关闭的过程中存在一定使用上的弊端,因此,设计一种在散货集装箱开启和关闭的过程中,箱内货物不会对人造成一定冲击和伤害的机构是十分重要的。
1发展背景目前,散货作为一种较为常见的货物,在海运时,主要以散货船以及散货集装箱的运输为主,散货船的装卸相比于现代化的集装箱码头而言,其效率和成本是无法比拟的,不仅货物周转时间长,且装卸船费工费时,同时,对码头的装卸器械也有较高的要求。
双小车岸边集装箱起重机自动装卸集装箱的关键技术

双小车岸边集装箱起重机自动装卸集装箱的关键技术摘要:岸桥对于码头装卸作业来说必不可少,其是各项工作能否有序开展的重要支持力量,同时也是保障装卸效率的关键所在。
早在2002年时,德国就已采用了具备多项优势的双小车岸桥,其能通过不同类型的小车接力完成装卸任务,但在此过程中岸桥的高度也在逐步提升,导致防摇问题越发严重,使得司机难以控制对箱,因此在应用双小车岸桥的过程中还需要针对不同类型的小车采用相应的控制技术,如自主学习和防摇技术等,进而促使装卸工作能够有序开展,并减轻司机的工作量,文中就对此问题进行了详细探讨。
关键词:双小车岸桥;集装箱起重机;自动装卸;电子防遥技术引言:起重机又可称为岸桥,其应用于装卸作业的过程中不仅能够极大地降低作业成本,并且能够使集散效率得到提升,目前其功能也越发完善,并且已经实现了自动化操作。
但还需要对岸桥工作过程中所存在的不足之处加以调整,针对主小车与门架小车两种类型的集装车应用相关的控制技术,解决吊具摇摆过于严重的问题,进而降低安全事故发生的概率,本文就对此问题进行了具体分析。
一、双小车岸桥工作流程岸边集装箱起重机可简称为岸桥,结构图如图1所示,是装卸作业开展过程中必不可少的一项关键设备,在设计过程中必须根据装卸系统的要求合理控制各项技术参数。
此外,在卸载集装箱时主要是通过主小车实现的,在装卸过程中所采用的岸桥类型如果为单小车,则运行的距离总长可用L表示,速度匀速可表示为v,由此就可计算出整个装卸过程所需的时间,可用公式t=L/v表达。
由公式可知,如果运行距离固定,仅通过改变速度是很难在原有基础上提高工作效率,因此需要从岸桥类型入手,用双小车岸桥替换单小车岸桥,该类岸桥的特点在于其设有主小车、平台与及门架小车,这与单小车安桥仅配备一个主小车差异性较大,结构组成更加复杂,为工作过程及结构组成。
由图可知,在装卸之前主小车所在的位置是集装箱上方,而卡车及工具上方则为门架小车。
在具体操作的过程中,主小车吊起集装箱并运向平台,直至中上方并放下集装箱,此后朝相反方向依次完成其他集装箱的抓取[1],在主小车运行的同时门架小车也朝着平台方向运转,直至集装箱上方,抓取后通过运载工具卸下,并依次通过这种循环的方式进行抓取与卸下,直至完成整个集装箱的运输与装卸。
集装箱锁使用介绍

自动旋转到锁的状态
自动锁严禁使用在舱底,除一些大泳池的舱底。
主菜单
型号
NA-3J
装锁方式
在塔底装锁
常用此锁底船 EVER GREEN、LT、”K”-LINE等
在塔底装锁时,锁一端有孔的必须朝上
塔底装锁示意图
塔底工人拆锁示意图
1
箱顶开锁工人工人
向 下
推
锁
柄
主菜单2Βιβλιοθήκη 锁柄咔哒一声 成约60度角
箱顶开锁示意图
装锁方式
工人在塔底装锁(装锁时不分正反面)
常用此锁底船 旧款MAERSK和一些旧OOCL船会使用此锁,此锁通常坏锁较
多且船公司已逐渐停止使用此锁
主菜单
正确位置
塔底装锁顺序
将箱卸落车架
将锁柄向上拨开锁
将锁放回工具箱
自动化双小车岸桥中转平台自动拆装扭锁技术改造
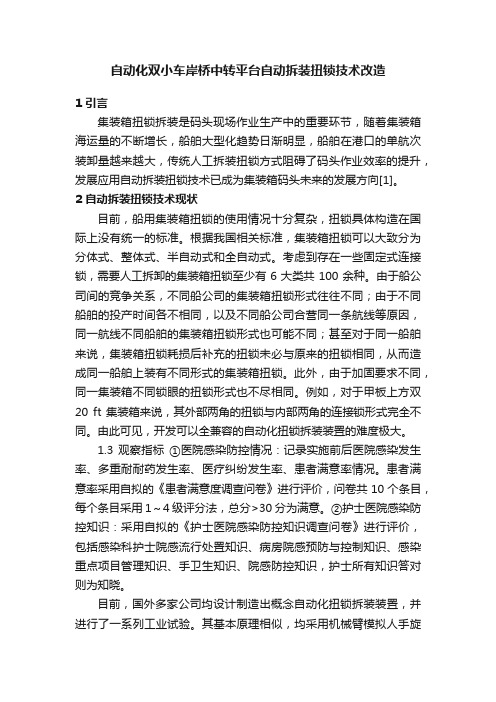
自动化双小车岸桥中转平台自动拆装扭锁技术改造1 引言集装箱扭锁拆装是码头现场作业生产中的重要环节,随着集装箱海运量的不断增长,船舶大型化趋势日渐明显,船舶在港口的单航次装卸量越来越大,传统人工拆装扭锁方式阻碍了码头作业效率的提升,发展应用自动拆装扭锁技术已成为集装箱码头未来的发展方向[1]。
2 自动拆装扭锁技术现状目前,船用集装箱扭锁的使用情况十分复杂,扭锁具体构造在国际上没有统一的标准。
根据我国相关标准,集装箱扭锁可以大致分为分体式、整体式、半自动式和全自动式。
考虑到存在一些固定式连接锁,需要人工拆卸的集装箱扭锁至少有6大类共100余种。
由于船公司间的竞争关系,不同船公司的集装箱扭锁形式往往不同;由于不同船舶的投产时间各不相同,以及不同船公司合营同一条航线等原因,同一航线不同船舶的集装箱扭锁形式也可能不同;甚至对于同一船舶来说,集装箱扭锁耗损后补充的扭锁未必与原来的扭锁相同,从而造成同一船舶上装有不同形式的集装箱扭锁。
此外,由于加固要求不同,同一集装箱不同锁眼的扭锁形式也不尽相同。
例如,对于甲板上方双20 ft集装箱来说,其外部两角的扭锁与内部两角的连接锁形式完全不同。
由此可见,开发可以全兼容的自动化扭锁拆装装置的难度极大。
1.3 观察指标①医院感染防控情况:记录实施前后医院感染发生率、多重耐耐药发生率、医疗纠纷发生率、患者满意率情况。
患者满意率采用自拟的《患者满意度调查问卷》进行评价,问卷共10个条目,每个条目采用1~4级评分法,总分>30分为满意。
②护士医院感染防控知识:采用自拟的《护士医院感染防控知识调查问卷》进行评价,包括感染科护士院感流行处置知识、病房院感预防与控制知识、感染重点项目管理知识、手卫生知识、院感防控知识,护士所有知识答对则为知晓。
目前,国外多家公司均设计制造出概念自动化扭锁拆装装置,并进行了一系列工业试验。
其基本原理相似,均采用机械臂模拟人手旋转扭锁的下部,通过连轴带动扭锁的上部,进而实现扭锁拆装。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
器处于分离状态,浮动梯前后移动时,离合器外圈会跟随转动,即可检测出位移值;另一处是浮动梯后部的行走小车,浮动梯的后端铰接在行走小车上,可通过测量小车的位移获得浮动梯的位移㊂经过对比分析,由于行走小车与浮动梯一体,能够直观地反映出浮动梯的前后位移量,而且方便布置;离合器虽然也能反映出浮动梯的前后位移量,但是上部行走小车前后移动1m,反映到离合器的圆周转动上只是移动了几十毫米,不利于智能监测㊂因此最终选择将传感器安装在行走小车上㊂经过测试,选择型号为KJT-WJ18D的模拟量位移传感器,额定感应距离为1~15mm㊂在浮动梯经常浮动区域设置一排间距为60mm的M12螺栓,将模拟量位移传感器固定于行走小车上,调整好传感器与螺栓之间的感应距离㊂浮动梯在浮动期间,模拟量位移传感器会频繁地经过M12螺栓,发出滴滴的警示声音,证明浮动梯一直处于浮动状态,提示操作人员浮动梯运行良好㊂4㊀结语登船梯的手动泵站系统及浮动梯位移智能监测系统的升级改造完成后,经过长时间的观察使用,完全达到了预期的目标㊂操作人员经过反复的操作练习,能够较熟练地在断电情况下对浮动梯的升降㊁后撤及大车制动的开闭进行操作㊂浮动梯位移智能监测系统,能够准确监测浮动梯的浮动状态㊂此次升级改造,可确保登船梯的正常作业及旅客安全,在技术上比较成熟,具有一定的推广价值㊂参考文献[1]㊀魏喜新.液压技术手册[M].上海:上海科学技术出版社,2015.[2]㊀交通部水运司.港口起重运输机械管理手册[M].北京:人民交通出版社,2002.石积荣:264000,山东省烟台市海港路23号收稿日期:2018-12-13DOI:10.3963/j.issn.1000-8969.2019.02.005码头集装箱锁销自动化拆装技术研究陆拥军上海国际港务(集团)股份有限公司尚东集装箱码头分公司㊀㊀摘㊀要:为提高生产效率并保证人员安全,分析了码头集装箱锁销的使用情况及特点,分别设计了不同的码头集装箱锁销自动化拆装技术方案㊂该技术方案可以适用于国际通用的单20ft箱㊁双20ft箱㊁40ft 箱以及45ft箱㊂这4种集装箱作业的锁销自动拆装和多种作业模式,无需人工操作,可有效提高码头的安全管理和生产效率㊂㊀㊀关键词:码头;集装箱;锁销拆装;自动化Research on Automatic Disassembly Technology of LockPin of Terminal ContainerLu YongjunShanghai International Port(Group)Co.,Ltd.Shangdong Container Terminal Branch㊀㊀Abstract:In order to improve the production efficiency and ensure the safety of personnel,the use situation and characteristics of lock pin of terminal container are analyzed and different automatic disassembly technology schemes of lock pin are designed.The scheme can be applied to the international common single20ft box,double20ft box,40ft box and 45ft box.The automatic disassembly of lock pins of these four containers and multiple operation modes can be operated without people,which can effectively improve the safety management and production efficiency of terminal.㊀㊀Key words:terminal;container;disassembly of lock pin;automation61Port Operation㊀2019.No.2(Serial No.245)1㊀引言集装箱运输是一种高效率㊁大规模生产的运输方式㊂集装箱运输过程必须进行有效的绑扎和固定,防止集装箱的滑落和倾覆㊂作为安全绑扎的锁销,其拆卸和安装是集装箱装卸作业中必不可少的环节,也是安全作业的关键环节㊂目前,集装箱的绑扎主要利用锁销,每次卸箱时,都必须先对锁销进行解锁,集装箱被吊至地面或适当位置后,再靠人工将锁销取下;在装箱的时候,人工将锁销装在集装箱上,待集装箱放到船上的时候,使上下2个集装箱连接成一体[1]㊂解锁㊁取锁㊁装锁3个步骤是集装箱装卸过程中必不可少的环节,据不完全统计,整个作业过程中,至少有1/3的时间花在处理锁销上,严重影响效率,消耗大量人力成本[2-4]㊂针对自动化码头人工拆装锁销工作效率低㊁存在安全隐患等问题,提出了一种锁销自动拆装系统㊂2㊀码头作业模式码头可分为常规码头和自动化码头㊂(1)常规码头㊂岸桥为常规单小车岸桥,水平运输为集卡,锁销的拆卸和安装在门框内完成,集装箱搁在集卡上(见图1);或者岸桥为带锁销平台的单小车岸桥,水平运输为跨运车或集卡,锁销的拆卸和安装在锁销平台上,集装箱悬吊状态下完成(见图2)㊂图1㊀集装箱搁在集卡上情况(2)自动化码头㊂岸桥为带中转平台的双小车岸桥,水平运输以AGV(Automated Guided Vehicle,集装箱自动导引运输车)为主,锁销的拆卸和安装在中转平台完成,集装箱放置在搁架上(见图3)㊂3㊀锁销自动拆装技术方案3.1㊀锁销自动拆装系统构成锁销自动拆装系统由自动拆装装置㊁位置识别系统㊁传送带以及控制系统等组成(见图4)㊂图2㊀集装箱悬浮状态下情况图3㊀集装箱放置在搁架上情况图4㊀锁销自动拆装系统位置识别系统负责识别目标位置,提供相应的信号给机器人;传送带实现锁销的水平传输;控制系图5㊀自动拆装装置统负责系统的控制以及与码头设备的信号对接;自动拆装装置主要负责定位和跟踪目标物(集装箱锁销),并实现自动的拆卸和安装,由夹具㊁浮动装置和机器人构成(见图5)㊂其中,夹具负责对目标物进行拆卸和安装,可以根据不同的锁销配置不同的夹具;浮动装置负责弥补位置识别系统㊁机器人位置重复精度误差以及锁销外形等差异;机器人用来控制夹具的位置,实现夹具和目标位置的匹配㊂71港口装卸㊀2019年第2期(总第245期)图6㊀拆锁流程锁销拆装系统要能完全实现其功能,位置识别系统是必不可少的㊂在拆卸环节,首先利用位置识别系统判断是否确实有需要拆卸的锁销存在;接着在夹持取锁前对锁销的种类进行辨别,保证锁销和夹具的匹配,继而对锁销的位置和姿态进行准确判断和测量,提供相应的信息给控制系统,以便完成锁销的拆卸工作;最后对拆卸工作进行验证,确认锁销已经被拆卸成功㊂在安装环节,首先利用位置识别系统判断安装位置无锁销;接着在夹持取锁前对锁销的种类进行辨别,保证锁销和夹具的匹配,继而对安装目标位置(集装箱箱角)进行准确判断和测量,提供相应的信息给控制系统,以便完成锁销的安装工作;最后对安装工作进行验证,确认锁销已经被安装成功㊂拆锁流程见图6,机器人通过位置识别系统获得目标位置,确定位置后夹具执行拆卸任务,之后将拆下的锁销放置在传送带上,通过传送带将锁销运送至锁销框,至此一次拆锁流程完成㊂安装流程与拆卸流程正好相反,但此时需要人工将框内的锁销逐个取出摆放在传送带上,由传送带将锁销传送到指定位置,以便机器人抓取㊂3.2㊀锁销自动化拆装系统在4种集装箱拆装中的应用㊀㊀码头的集装箱尺寸并不全部一致,不同尺寸的集装箱锁销拆装任务需要采用不同的方法㊂本文针对国际通用的单20ft 箱㊁双20ft 箱㊁40ft 箱以及45ft 箱这4种集装箱作业,分别设计了不同的解决方案(见图7)㊂本拆装系统单边采用4台机器人手臂,两端各1台,中部安装2台㊂对于单20ft 箱,使用中部2台机器人手臂完成拆装工作;40ft 箱的锁销拆装在之前的基础上配合两端的机器人手臂完成;由于机器人手臂具有可旋转伸缩的特性,故可以满足45ft 箱和双20ft 箱的工作㊂图7㊀4种集装箱锁销自动拆装方案3.3㊀锁销自动拆装系统在3种作业模式中的应用目前,全球码头有多种作业模式,其中常规集卡码头㊁常规跨运码头和自动化码头3种模式最常见㊂锁销自动化拆装系统可以完全适应这3种作业模式㊂在自动化码头中转平台的应用中,锁销自动拆装系统由自动拆装装置㊁集装箱搁架㊁传送带㊁位置识别系统和控制系统组成(见图8)㊂岸桥主小车吊具将集装箱吊运至中转平台搁架上,系统自动检测主吊具的作业模式,并将模式信息经过控制系统传递给机器人㊂集装箱下落至搁架后,机器人根据作业模式信息自动加载初始位置,随后位置识别系统检测锁销的具体位置,系统根据位置信息调整机器人的最终位置,之后机器人开始拆锁作业㊂该系统使用多个机器人同时工作,拆卸后的锁销由传送带运送至锁销框内,完成拆锁的集装箱被门架小车吊走㊂安装环节,门架小车吊运集装箱至中转平台,系统自动检测门架小车吊具的作业模式,工作人员选择对应的锁销放在传送带上,而后传送带将锁销运81Port Operation㊀2019.No.2(Serial No.245)送至对应位置,机器人开始工作,从传送带上取出锁销安装到集装箱上㊂安装完成后,岸桥主小车将集装箱吊运至船上完成装船作业㊂图8㊀自动拆装系统在自动化码头中转平台上的应用图9㊀自动拆装系统在跨运车码头的应用在跨运车应用场合,锁销自动拆装系统由工作间㊁支架㊁传送带㊁位置识别系统㊁控制系统㊁动力单元㊁自动拆装装置组成(见图9)㊂装船时,岸桥小车将集装箱吊运至系统搁架上㊂在落箱过程中,位置识别系统检测集装箱的箱型,并提供信号,经控制系统传递给机器人㊂集装箱下落至搁架上之后,机器人根据箱型信息自动加载初始位置,位置识别系统会对锁销的位置进行准确的检测,系统根据位置信息调整机器人的最终位置,之后机器人进行拆锁作业㊂拆卸后的锁销由传送带运送至锁销框内,完成拆锁的集装箱被跨车吊走㊂安装时,跨运车将集装箱运送至系统搁架上,在落箱过程中,位置识别系统检测集装箱的箱型,并提供信号经控制系统传递给机器人㊂集装箱下落至搁架上之后,机器人根据箱型信息自动加载初始位置,同时工作人员选择相应的锁销并放在传送带上,传送带将锁销运送至对应位置,多组机器人同时工作,将锁销全部安装到集装箱上,随后岸桥完成装船作业㊂在集卡场合的应用中(见图10),岸桥起重小车将集装箱吊运至集卡上,由集卡将其运送到锁销拆装系统位置,集卡司机根据占位指示灯信号调整集卡至最佳位置,位置识别系统检测集装箱的箱型,并提供信号经控制系统传递给机器人,机器人根据作图10㊀自动拆装系统在集卡码头的应用业模式信息自动加载初始位置㊂随后位置识别系统检测锁销的具体位置,系统根据位置信息调节机器人最终位置,机器人开始作业㊂拆除锁销后,集装箱由集卡运送至指定位置㊂安装时,集卡将集装箱运送至集卡锁销拆装站,集卡司机根据占位指示灯信号调整集卡至最佳位置,位置识别系统检测集装箱的箱型,并提供信号经控制系统传递给机器人,同时工作人员选择对应的锁销安装在传送带上㊂传送带将锁销自动传输至对应位置,机器人将锁销安装到集装箱上㊂锁销安装完成后,集卡将集装箱运送至岸桥下方,由岸桥进行装船作业㊂4㊀结语自动拆装锁销系统以工业机器人为载体,实现系统的高度自动化和智能化㊂系统的兼容性好,系统设计兼顾目前的传统手工作业模式,可以完全适用目前码头的多种作业模式㊂系统的扩展功能强大,系统中的拆装单元作为执行装置,可以根据不同锁销的种类更换不同的拆装夹具㊂锁销自动拆装系统的应用使得码头的安全性㊁作业效率得到显著提高㊂参考文献[1]㊀王伟,姚振强,包起帆.自动化堆场集装箱先进装卸工艺的探讨[J].机械设计与研究,2007(2):84-87.[2]㊀沙梅.集装箱码头工艺方案设计建模与仿真[J].系统仿真学报,2003,15(9):1240-1244.[3]㊀赵彦虎.新型自动化集装箱码头装卸工艺系统研究(J).港口装卸,2009(3):22-24.[4]㊀杨瑞,谢文宁.自动化集装箱码头的装卸工艺及设备(J).集装箱化,2010(3):2-4.陆拥军:201306,上海市浦东新区同汇路1号收稿日期:2018-12-12DOI:10.3963/j.issn.1000-8969.2019.02.00691港口装卸㊀2019年第2期(总第245期)。