89C51单片机变频调速控制系统
89C51单片机直流电机调速Word版

计算机控制技术课程设计成绩评定表设计课题基于89C51的直流电机调速设计学院名称:电气工程学院专业班级:学生姓名:学号:同组者:指导教师:设计地点:设计时间:单片机系统课程设计任务书目录1 引言 (4)2 总体方案设计 (5)2.1总体方案 (5)2.2 原件选择及介绍 (6)3 硬件电路设计 (10)3.1 单片机及其外围整体电路 (10)3.3 键盘扫描电路 (12)3.4 LED显示模块电路 (18)3.5 D/A转换器及其与MCU的接口电路 (13)4 系统软件设计 (13)4.1 主程序设计 (13)4.2 中断服务程序设计 (15)4.3 子程序的设计 (17)5 系统调试与总结 (18)调试总结 (18)参考文献 (19)附录A 系统原理图 (20)附录B 源程序 (21)1 引言电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。
无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。
据资料显示,在所有动力资源中,百分之九十以上来自电动机。
同样,我国生产的电能中有百分之六十是用于电动机的。
电动机与人的生活息息相关,密不可分。
电气时代,电动机的调速控制一般采用模拟法,对电动机的简单控制应用比较多。
简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。
然而近年来,随着技术的发展和进步,以及市场对产品功能和性能的要求不断提高,直流电动机的应用更加广泛,尤其是在智能机器人中的应用。
直流电动机的起动和调速性能、过载能力强等特点显得十分重要,为了能够适应发展的要求,单闭环直流电动机的调速控制系统得到了很大的发展。
而作为单片嵌入式系统的核心—单片机,正朝着多功能、多选择、高速度、低功耗、低价格、大存储容量和强I/O功能等方向发展。
随着计算机档次的不断提高,功能的不断完善,单片机已越来越广泛地应用在各种领域的控制、自动化、智能化等方面,特别是在直流电动机的调速控制系统中。
基于单片机89C51产生PWM信号来控制直流电机调速程序

基于单片机89C51产生PWM信号来控制直流电机调速程序利用2051的T0产生双路PWM信号,推动L293D或L298N为直流电机调速,程序已通过调试。
/* =======直流电机的PWM速度控制程序======== */ /* 晶振采用11.0592M,产生的PWM的频率约为91Hz */#include#include#define uchar unsigned char#define uint unsigned intsbit en1=P1^0; /* L298的Enable A */sbit en2=P1^1; /* L298的Enable B */sbit s1=P1^2; /* L298的Input 1 */sbit s2=P1^3; /* L298的Input 2 */sbit s3=P1^4; /* L298的Input 3 */sbit s4=P1^5; /* L298的Input 4 */uchar t=0; /* 中断计数器 */uchar m1=0; /* 电机1速度值 */uchar m2=0; /* 电机2速度值 */uchar tmp1,tmp2; /* 电机当前速度值 *//* 电机控制函数 index-电机号(1,2); speed-电机速度(-100~100) */void motor(uchar index, char speed){if(speed>=-100 && speed<=100){if(index==1) /* 电机1的处理 */{m1=abs(speed); /* 取速度的绝对值 */if(speed<0) /* 速度值为负则反转 */{s1=0;s2=1;}else /* 不为负数则正转 */{s1=1;s2=0;}}if(index==2) /* 电机2的处理 */{m2=abs(speed); /* 电机2的速度控制 */ if(speed<0) /* 电机2的方向控制 */ {s3=0;s4=1;}else{s3=1;s4=0;}}}}void delay(uint j) /* 延时函数 */{for(j;j>0;j--);}void main(){uchar i;TMOD=0x02; /* 设定T0的工作模式为2 */ TH0=0x9B; /* 装入定时器的初值 */TL0=0x9B;EA=1; /* 开中断 */ET0=1; /* 定时器0允许中断 */TR0=1; /* 启动定时器0 */while(1) /* 电机实际控制演示 */{for(i=0;i<=100;i++) /* 正转加速 */{motor(1,i);motor(2,i);delay(5000);}for(i=100;i>0;i--) /* 正转减速 */{motor(1,i);motor(2,i);delay(5000);}for(i=0;i<=100;i++) /* 反转加速 */{motor(1,-i);motor(2,-i);delay(5000);}for(i=100;i>0;i--) /* 反转减速 */{motor(1,-i);motor(2,-i);delay(5000);}}}void timer0() interrupt 1 /* T0中断服务程序 */{if(t==0) /* 1个PWM周期完成后才会接受新数值 */ {tmp1=m1;tmp2=m2;}if(tif(tt++;if(t>=100) t=0; /* 1个PWM信号由100次中断产生 */ }。
89C51单片机直流电机调速
计算机控制技术课程设计成绩评定表设计课题基于89C51的直流电机调速设计学院名称:电气工程学院专业班级:学生姓名:学号:同组者:指导教师:设计地点:设计时间:单片机系统课程设计任务书目录1 引言 (4)2 总体方案设计 (5)2.1总体方案 (5)2.2 原件选择及介绍 (6)3 硬件电路设计 (10)3.1 单片机及其外围整体电路 (10)3.3 键盘扫描电路 (12)3.4 LED显示模块电路 ........................................................... 错误!未定义书签。
3.5 D/A转换器及其与MCU的接口电路 (13)4 系统软件设计 (13)4.1 主程序设计 (13)4.2 中断服务程序设计 (15)4.3 子程序的设计 (17)5 系统调试与总结 (18)调试总结 (18)参考文献 (19)附录A 系统原理图 (20)附录B 源程序 (21)1 引言电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。
无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。
据资料显示,在所有动力资源中,百分之九十以上来自电动机。
同样,我国生产的电能中有百分之六十是用于电动机的。
电动机与人的生活息息相关,密不可分。
电气时代,电动机的调速控制一般采用模拟法,对电动机的简单控制应用比较多。
简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。
然而近年来,随着技术的发展和进步,以及市场对产品功能和性能的要求不断提高,直流电动机的应用更加广泛,尤其是在智能机器人中的应用。
直流电动机的起动和调速性能、过载能力强等特点显得十分重要,为了能够适应发展的要求,单闭环直流电动机的调速控制系统得到了很大的发展。
基于89C51单片机的直流电机控制系统设计

目录摘要 (3)关键词: (3)1直流电动机 (3)1.1直流电动机的工作原理 (3)1.1.1直流电动机的运动特性与优点 (4)1.2直流串励电动机 (5)1.2.1串励电动机的特点 (5)1.3直流他励电动机 (5)1.3.1他励电动机的特点 (6)2设计概要 (6)2.1硬件设计概要 (7)2.2程序设计流程图 (7)3硬件设计 (8)3.1.1电机驱动电路 (8)3.1.2单片机及控制电路 (10)3.1.3单片机介绍 (12)3.1.3.3管脚说明 (14)4程序设计 (16)4.1主程序设计 (19)4.1.1定义说明程序 (19)4.1.2执行主程序 (20)4.2子程序设计 (22)4.2.1定义延时程序函数 (22)4.2.2定时器1中断服务程序 (22)4.2.3定时器2中断服务程序 (23)4.3调速原理 (23)4.3.1PWM(脉冲宽度调制)原理 (23)4.3.2PWM(脉冲宽度调制)特点 (24)5调试与仿真 (25)参考文献 (25)附录 (26)摘要通过单片机改变输出脉冲波的宽度井陉调节,以便实现直流电的起动、正反转、加速、减速功能,在这种调速方法下,可以有效的减少其损耗功率。
关键词:单片机;直流电机;调速1直流电动机直流电动机主要由静止的定子和旋转的转子组成。
定子由主磁极、换向极、电刷装置和机座组成。
主磁极铁芯上套有线圈,通入直流励磁电流便会产生磁场,即主磁场。
换向极也由铁芯及套在上面的线圈组成,其作用是产生附加磁场。
以减弱换向片与电刷之间的火花,避免烧蚀。
机座除作电动机的机械支架外,还作为各磁极间磁的通路。
转子由转子铁芯、转子绕组、换向器、轴和风扇组成。
转子铁芯用来安装转子绕组,并作为电动机磁路的一部分。
转子绕组的主要作用是产生感应电动势并通过电流,以产生电磁转矩。
换向器由换向片组成,换向片按一定规律与转子绕组的绕组元件连接。
1.1直流电动机的工作原理直流电动机包括俩个在空间固定的永久磁铁,一个为N极,另一个为S极。
89C51在直流调速控制系统中的应用

基于单片机(89C51)的双闭环直流调速系统摘要:该文介绍89C51单片机在直流电机转速控制系统中的应用、实现方法、硬件结构等。
本系统采用霍尔元器件测量电动机的转速,用89C51单片机对直流电机的转速进行控制,用DAC0832芯片实现输出模拟电压值来控制直流电动机的转速。
1.前言直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
早期直流电动机的控制均以模拟电路为基础,采用运算广大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂,功能单一,而且系统非常不灵活、调试困难,阻碍了坦洲电动机控制技术的发展和应用范围的推广。
随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。
采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。
2.转速的测量原理转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。
其单位为r/min。
转速的测量方法很多,由于转速是以单位时间内的转数来衡量的,因此采用霍尔元器件测量转速是较为常用的一种测量方法。
霍尔器件是具有半导体材料制成的一种薄片,器件的长、宽、高分别为l、b、d。
若在垂直于薄片平面(沿厚度d)方向施加外加磁场B,在沿l方向的两个端面加以外电场,则有一定的电流经过。
由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:fl=pVB 式中“fl—洛化磁力,q—载流子电荷,V—载流子运动速度,B—磁感应强度。
这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差UH称为霍尔电压。
霍尔电压大小为:U H=R HχIχB/d(mV)式中:R H—霍尔常数,d—元件厚度,B—磁感应强度,I—控制电流设K H= R H /d,则U N=K HχIχB(mV)K H为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在磁感应强度和单位控制输出霍尔电动势的大小。
基于51单片机的步进电机调速系统(含完整代码)

课程设计报告设计题目:遥控小车——基于51单片机的步进电机调速系统学院:专业:班级:学号:姓名:电子邮件:时间:成绩:指导教师:华南农业大学理学院应用物理系课程设计(报告)任务书学生姓名指导教师职称学生学号专业电子信息科学与技术题目基于51单片机的步进电机调速系统(遥控小车)任务与要求1. 设计并制作电路,利用单片计控制步进电机运转。
2. 通过键盘可以不间断地设定改变电机的转速、转向。
3. 利用显示器实时显示转速等参数。
4. 扩展功能:可设定转动步数。
开始日期2014 年3 月完成日期2014 年3 月1引言步进电机是一种将电脉冲转化为角位移的执行机构。
目前,步进机已经广泛应用于领域,例如工业生产中的机械臂的控制,照明装置和监控摄像机转动等。
步进机在装置转动、精确位移方面有很重大的作用。
本系统是基于STC89C51 单片机的遥控小车。
采用STC89C51单片机作为控制核心,通过ULN2003A驱动步进机(28BYJ-48)转动,由按键和显示屏1602组成人机交互模块,同时通过315M无线发射和接收模块向单片机输入控制信号,将整个系统固定于简易小车上,最终实现小车测试和远程遥控功能。
基本达到预定的设计要求以及功能的扩展。
2系统的设计与理论分析2.1系统总体设计2.2理论分析本设计分为两种工作模式:测试模式、遥控模式。
在电路板上有一个带锁的开关进行设置。
测试模式工作时,通过控制小车上的按键进行加速、减速、反转、设置、步数增、步数减等按键,单片机扫描按键,通过软件控制液晶模块显示对应的转速、设置的速度和步数,同时控制步进机模块进行相应的转动。
步进机的是由ULN2003A达林顿管驱动,由单片机控制输入脉冲的频率来控制步进机的转速,单片机是通过程序查表对4个I/O口输出脉冲,本次设计采用的是两相四线减速步进机,步进角为5.625°,减速比为64:1,程序采用的是8拍查表,具有较好的扭矩。
遥控模式工作时,遥控部分五个按键分别输入前、后、左、右、暂停,单片机扫描按键,通过无线发射模块发射串行编码,小车的无线接收模块接收对应的编码,送至单片机进行解码,从而控制液晶模块的显示和步进机模块的工作,进而完成功能。
基于89C51单片机的电动机转速控制器设计
1 引言:在电气时代的今天,电动机一直在现代的生产和生活中扮演着十分重要的作用。
据资料统计,如今有90%的动力源来自于电动机,我国生产的电能大约有60%用于电动机。
电动机与人们的生活密切相关。
步进电机作为机电一体化的关键产品之一,是一种将电脉冲信号转换成直线或角位移的控制电机,广泛应用于工业控制系统中。
其转速和机械角位移分别与输入电机绕组中的脉冲平率和脉冲个数成正比。
通过改变电脉冲频率,可大范围内进行调速【1】。
同时,该电机还能快速起动、制动、反转和自锁。
此外,步进电机易于实现计算机或其它数字元件接口,适用于数字控制系统。
由于具有上述特点,步进电机日益广泛应用于数字控制系统中,如数控机床、绘图机、自动记录仪表和数一模转换等装置。
但步进电机的驱动信号经常还是用一些专用的模拟芯片控制器或者是信号发生器来产生,缺乏灵活性和可靠性。
在一些智能化要求较高的场合,用模拟芯片以及信号发生器来控制步进电机有一定的局限性,可以采用AT89C51 单片机控制步进电机以改善其性能【2】。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在国民经济各个领域都有应用。
2 步进电机的工作原理步进电机本身可以直接接受数字信号,不需要进行数字与模拟量的转换,具有高精度快速启停能力。
如果选用三相六拍,步距1.5°,即进一步,电机转动1.5°,转动一周需要200步【3】。
步进电机直接由数字信号控制,其控制程序可以分为脉冲序列的生成、方向的控制、步进电机变速控制程序3部分。
2.1 步进电机控制的基本原理步进电机的基本控制包括转向控制和速度控制2个方面。
如图2.1.1,从结构上看,步进电机分为三相、四相、五相等类型,常用的则以三相为主。
三相步进电机的工作方式有三相单三拍、三相双三拍和三相六拍3种,下面具体加以阐述。
(1)换相顺序的控制步进电机通电换相这个过程称为脉冲分配。
例如,三相步进电机在单三拍的工作方式下,其各相的通电顺序为A-B-C-A,通电控制脉冲必须按照这一顺序分别控制A、B、C相得通断。
at89c51 工作原理
at89c51 工作原理AT89C51是一种单片机型号,下面将详细介绍其工作原理。
AT89C51是一款基于MCS-51体系结构的8位单片机。
它由一个中央处理器单元(CPU)、存储器、输入/输出端口以及定时/计数器等组成。
其工作原理如下:1. 程序存储器:AT89C51内部集成了4KB的闪存程序存储器,用于存储控制程序。
闪存存储器的内容可以通过编程来更改,使单片机适应不同的应用需求。
2. 数据存储器:AT89C51内部包含RAM和SFR特殊功能寄存器。
RAM用于存储变量和临时数据,SFR寄存器用于存储控制和状态信息。
3. I/O端口:AT89C51具有4个I/O端口(P0、P1、P2、P3),可用于连接外部设备。
每个端口都有8个引脚,每个引脚都可以配置为输入或输出,并具有上下拉电阻等功能。
4. 定时/计数器:AT89C51内部包含两个16位定时/计数器(Timer 0和Timer 1)。
它们可以用于测量时间间隔、生成延时、产生脉冲信号等。
定时/计数器可以配置为定时模式或计数模式,并可以通过软件或硬件触发启动。
5. 中断系统:AT89C51支持外部和内部中断。
它具有6个可屏蔽的外部中断源,可以连接到外部设备的引脚上。
同时,它还具有两个内部定时器中断(Timer 0和Timer 1的溢出中断)。
6. 控制单元:AT89C51的控制单元负责将程序存储器中的指令读取到指令缓冲器中,并执行这些指令。
控制单元还包含指令译码器,用于识别和执行各种指令操作。
AT89C51的工作原理是通过控制单元按照存储在程序存储器中的指令序列来实现的。
它可以实现多种功能,如数据处理、输入/输出控制、定时/计数、中断处理等。
在特定的应用场景中,可以通过编程来配置和控制AT89C51的工作方式,从而实现所需的功能。
89C51单片机的步进电动机控制系统设计

(1)输入输出压差不能太大,太大则转换效率急速降低,而且容易击穿
损坏;
(2)输出电流不能太大,1.5A是其极限值。大电流的输出,散热片的尺
寸要足够大,否则会导致高温保护或热击穿;
(3)输入输出压差也不能太小,大小效率很差。其中12V电压给步进
电机供电,5V电压则给单片机供电。分别如图2、图3所示。
口一个低电平;当按下开关S4时,相当于给P0.3口一个低电平;当按下开
关S5时,相当于给P0.4口一个低电平。然后通过单片机实行相应的操作。
如图4。
图4按键部分电路
驱动部分
此电路是步进电机的驱动部分,我选用的是ULN2004芯片来驱动的,
ULN2004系列是一款高耐压,大电流达林顿管驱动器,包含7个NPN达林
89C51单片机的步进电动机控制系统设计
本文为大家带来两个89C51单片机的步进电动机控制系统设计。
89C51单片机的步进电动机控制系统设计一
系统整图如图1所示,本系统采用外部中断方式,p0口作为信号的输入
部分,p1口为发光二极管显示部分,p2口作为电机的驱动部分。
图1系统整图
电源部分
பைடு நூலகம்利用LM7812和LM7805芯片得到12V和5V的电压,它们的应用要注意
顿管。如图5。
图5驱动部分电路
状态指示部分
状态指示用P1口控制发光二极管的显示,如果相应端口是低电平,相应
的发光二极管就会亮,用它来表示步进电机所处的状态。
时钟部分
时钟电路是计算机的心脏,它控制着计算机的工作节奏,可以通过提高时
钟频率来提高CPU的速度,本次设计采用的晶振为12MHz。如图6。
图6时钟部分电路
(1)产生12V的电压给步进电机供电
基于STC89C51单片机的智能温度控制系统设计
基于STC89C51单片机的智能温度控制系统设计一、本文概述随着科技的快速发展和智能化时代的到来,温度控制技术在各个领域中的应用越来越广泛,特别是在工业、农业、医疗、家居等领域,对于温度的精确控制要求日益提高。
传统的温度控制系统往往依赖于复杂的硬件设备和繁琐的操作流程,难以满足现代社会的需求。
因此,开发一种基于STC89C51单片机的智能温度控制系统,旨在通过先进的控制技术实现温度的精确、稳定和高效控制,具有重要的现实意义和应用价值。
本文将对基于STC89C51单片机的智能温度控制系统设计进行全面的探讨。
文章将介绍STC89C51单片机的性能特点及其在温度控制系统中的优势,为后续的设计提供理论基础。
接着,文章将详细阐述系统设计的总体方案,包括硬件设计和软件设计两大部分,以确保系统的稳定性和可靠性。
在硬件设计方面,文章将重点介绍温度传感器、控制器、执行器等关键部件的选型与连接;在软件设计方面,文章将详细介绍温度数据的采集、处理、控制算法的实现以及用户界面的设计。
本文还将对系统的调试与优化过程进行详细的描述,包括硬件调试、软件调试、系统测试等环节,以确保系统在实际应用中能够达到预期的性能指标。
文章将对整个设计过程进行总结,并对未来的研究方向进行展望,以期为推动智能温度控制技术的发展贡献一份力量。
本文旨在设计一种基于STC89C51单片机的智能温度控制系统,通过对其硬件和软件设计的详细介绍,以及系统调试与优化的过程分析,为相关领域的研究人员和实践者提供一种参考和借鉴。
本文也期望能够推动智能温度控制技术在实际应用中的广泛推广和应用,为现代社会的智能化发展贡献一份力量。
二、系统硬件设计系统硬件设计是基于STC89C51单片机的智能温度控制系统的核心部分,主要包括STC89C51单片机、温度传感器、显示模块、控制执行模块以及电源模块等几大部分。
单片机模块:选用STC89C51作为核心控制器,该单片机具有高性能、低功耗、易编程等优点,能够满足系统对温度数据的采集、处理和控制的需求。
单片机89C51做电梯自动控制系统设计

单片机原理与应用技术课程设计报告基于单片机控制的电梯自动控制系统专业班级:姓名:时间:指导教师:基于单片机控制的电梯自动控制系统1.设计目的与要求1.1 基本功能(1)显示:本设计要求实现6层控制,实时显示电梯所在楼层位置。
(2)升降控制:采用一台电动机的正反转来实现电梯的升降。
(3)具备不可逆响应的功能:电梯上升途中只响应上升呼叫,下降途中只响应下降呼叫,任何反方向呼叫均无效。
1.2 扩展功能(1)可增加人性化的按键语音服务功能。
(2)可增加遥控或感应操作功能。
2.设计内容(1)画出电路原理图,正确使用逻辑关系;(2)确定元器件及元件参数;(3)进行电路模拟仿真;(4)SCH文件生成与打印输出;3.编写设计报告写出设计的全过程,附上有关资料和图纸,有心得体会。
4.答辩在规定时间内,完成叙述并回答问题。
- 2 -目录1 引言 ·······································································································- 4 -2 电梯控制系统原理················································································- 4 -3 总体设计方案························································································- 5 -3.1 设计思路·······················································································- 5 -3.1.1 方案比较··············································································- 5 -3.1.2 方案确立··············································································- 5 -3.2 设计方框图···················································································- 6 -4 电梯控制系统单元电路的设计 ····························································- 6 -4.1 单片机最小系统···········································································- 7 -4.2 信号输入电路···············································································- 7 -4.2.1 内外请求输入电路 ······························································- 8 -4.2.2 厢体位置模拟输入电路·······················································- 8 -4.3 信号模拟输出电路 ·······································································- 9 -4.3.1 楼层显示电路 ······································································- 9 -4.3.2 电梯外部请求显示电路·····················································- 10 -4.3.3 电梯方向及开关门电路·····················································- 11 -5 系统软件设计······················································································- 12 -5.1 初始化程序·················································································- 12 -5.2 各楼层子程序·············································································- 12 -5.3 显示子程序·················································································- 12 -6 结束语 .................................................................................................- 14 - 参考文献 .................................................................................................- 14 - 附录一 .....................................................................................................- 16 - 附录二 (17)- 3 -基于单片机原理的电梯自动控制系统摘要:本文介绍了基于单片机的电梯控制系统,硬件部分主要由单片机最小系统模块、电梯内外电路按键矩阵模拟检测模块、电梯外请求发光管显示模块、楼层显示数码管模块、电梯上下行及开关门模拟显示模块等5部分组成。
基于AT89C5单片机的步进电机控制系统设计

毕业设计摘要步进电机是数字控制系统中的一种执行元件,它能按照控制脉冲的要求,迅速起动,制动,正反转和调速。
具有步距角精度高,停止时能自锁等特点,因此步进电机在自动控制系统中,特别是在开环的控制系统中得到了日益广泛的应用。
本文以单片机和环形脉冲分配器为核心设计的步进电机控制系统,通过软硬件的设计调试,实现步进电机能根据设定的参数进行自动加减速控制,使控制系统以最短的时间到达控制终点,而又不发生失步的现象;同时它能准确地控制步进电机的正反转,启动和停止。
硬件是以AT89C51单片机为核心的控制电路,主要包括:环形脉冲分配器、键盘显示电路、步进电机的驱动电路等。
软件部分采用C语言编程,主要包括键盘显示程序、步进电机的调速程序、停止判断程序等。
关键词:步进电机控制系统;调速;单片机AbstractStepping motor is a kind of digital control system components. It can achieve quick start-up, positive inversion, stopping and speed control, according to the control pulse. It has high precision step angle, and can be self-locking when it keeps still. As these characteristics, stepping motor in automatic control system, especially in the open loop control system has been widely applied.This article mainly focuses on taking Single-chip Computer and cycle pulse distributor as the core, and designing the stepping motor control system. Through the design of the software and hardware debugging, it realizes controlling the step motor’s accel eration and deceleration automatically, according to parameter setting. Making the system arrive the end point with the shortest time, but not occur outing of step. Besides it can accurately achieve start-up, positive inversion and shutdown. Hardware takes AT89C51 as the core of control circuit, mainly including: cycle pulse distributor, keyboard and display circuit, stepping motor driving circuit, etc. Software part adopts the C language programming, mainly including keyboard and display program, stepping motor speed control program, stop judging program, etc.Key words: Stepping motor control system; speed control; Single-chip Compute目录摘要 (I)Abstract (II)目录 (I)第一章引言 (1)1.1 课题提出的背景和研究意义 (1)1.2 课题的主要研究内容 (2)1.3 本章小结 (2)第二章步进电机控制系统设计 (3)2.1 步进电机的原理 (3)2.1.1 三相单三拍通电方式 (3)2.1.2 三相双三拍通电方式 (5)2.1.3 三相六拍通电方式 (6)2.2 环形脉冲分配器 (8)2.3 续流电路 (12)2.3.1 二极管续流 (13)2.3.2 二极管—电阻续流 (14)2.4 步进电机驱动电路 (15)2.5 步进电机的变速控制 (17)2.5.1 变速控制的方法 (20)2.6 步进电机在自动生产线中的应用 (20)2.7 本章小结 (22)第三章控制系统硬件设计 (23)3.1 硬件系统设计原则 (23)3.2 控制系统组成 (24)3.3 主要元件的选择 (24)3.3.1 单片机的选择 (24)3.3.2 EPROM的选择 (25)3.3.3 可逆计数器的选择 (27)3.4 控制系统接口电路的设计 (28)3.4.1 环形脉冲分配器设计 (28)3.4.2 显示电路设计 (29)3.4.3 外部复位电路设计 (30)3.5 控制系统整体电路设计 (31)3.6 本章小结 (32)第四章控制系统软件设计 (32)4.1 软件系统设计原则 (32)4.2 步进电机控制系统功能设计 (33)4.3 主程序设计 (34)4.3.1 主程序工作过程 (34)4.3.2 主程序工作流程图 (35)4.3.3 定时器T0中断程序流程图 (35)4.4 Proteus仿真 (38)4.5 显示程序设计 (40)4.6 键盘程序设计 (41)4.7 调速程序设计 (42)4.7.1 20BY步进电机参数 (42)4.7.2 步进电机转速与频率的关系 (42)4.8 本章小结 (44)第五章结束语 (44)参考文献 (45)第一章引言1.1 课题提出的背景和研究意义由于步进电机不需要位置传感器或速度传感器就可以实现定位,即使在开环状态下它的控制效果也是令人非常满意的,这有利于装置或设备的小型化和低成本,因此步进电机在计算机外围设备、数控机床和自动化生产线等领域中都得到了广泛的应用。
基于89C51单片机的步进电动机控制系统设计

基于89C51单片机的步进电动机控制系统设计李美艳【摘要】为了实现对步进电动机控制的需求,提出了一种基于89C51单片机控制的步进电动机系统设计方案,并完成步进电动机系统的硬件和软件设计。
单片机采用89C51系列,在单片机与步进电机之间选用74LS04与4N29组成的驱动电路,实现对单片机的保护。
该系统的软件部分采用进行C编程,能够完成对步进电动机的精确控制。
实际应用表明,所设计的控制系统具有操作简便、控制精度高、可靠性好等特点,具有较高的使用价值。
%In order to satisfy the requirement of the stepper motor control, the design of the stepper motor system based on 89C51 single-chip microcomputer is designed in this paper. and implement the design of hardware and software of the stepping motor system. Using 89C51 microcontroller series, between microcontroller and stepper motor using 74LS04 and 4N29 transistor composition of the drive circuit, to achieve the protection of single chip microcomputer.The software part of the system uses the C programming, can achieve precise control of stepper motor. The experiment and application show that the designed control system has the advantages of simple operation, high control precision, good reliability,and has the high use value.【期刊名称】《电子设计工程》【年(卷),期】2014(000)023【总页数】3页(P125-127)【关键词】步进电动机;单片机;控制精度;可靠性【作者】李美艳【作者单位】西安外事学院陕西西安 710077【正文语种】中文【中图分类】TM383.6随着数字化技术的快速发展,数字控制技术在工业控制方面得到了极其广泛的应用。
基于89C51单片机控制的汽车空调制冷系统
百度文库图书分类号:密级:毕业设计(论文)基于89C51单片机控制的汽车空调制冷系统89C51 MICROCONTROLLER BASED CONTROL OF CAR AIR CONDITIONINGSYSTEMS摘要现在汽车的技术发展的很快,但控制的时候精度都不是很高,更加谈不上自动化的控制了,如果空调出现问题了维修起来是非常不方便了,这就让我们的用户在使用的时候舒适感大大的下降了。
因此,空调控制系统急需改造。
这个系统主要研究的就是将空调的舒适性提高,我们使用的传感器是精度很高的数字温湿度,这个控制系统的核心就是89C51很及时的对汽车当下的温度还是湿度进行测量还有显示,然后经过汽车的压缩机进行控制,让汽车空调能够自动化的进行控制,当然它也可以手动控制我们汽车里面的温度。
我们这篇论文主要描述的是在压缩机的控制下让汽车里面的空调系统能够实现自动化。
关键词89C51单片机;空调制冷;硬件设计;软件设计AbstractNow fast technological development of the car, most of our automotive air conditioning systems are used in relatively low precision analog components, precision time control is not very high, not to mention automation control, and if there is a problem of air conditioning maintenance is very inconvenient, which allows our users to use the time to comfort greatly declined. Therefore, air conditioning control system in urgent need of renovation.This system is mainly research is to improve the comfort of air conditioning, sensor we use is a high precision digital temperature and humidity control system is the core of the 89C51 is very timely moment for automotive temperature or humidity measurements also show, then After the car compressor control, let the car air conditioning can be controlled automation, of course, it can also manually control the temperature inside our car. We describe in this paper is mainly under the control of the compressor to get the car inside the air-conditioning system can be automated.Through this design, the university is in the consolidation of knowledge, yet solid foundation themselves into the community.Keywords 89C51 microcontroller; air conditioning and refrigeration; hardware design; software design目录摘要 (I)Abstract (II)1 绪论 (1)2 汽车空调制冷系统概述 (6)2.1 汽车空调制冷系统的组成 (6)6 汽车空调制冷系统的维护及故障诊断 (7)6.1 汽车空调制冷系统的维护 (7)6.2 汽车空调制冷系统的故障诊断 (8)结论 (9)致谢 (10)参考文献 (10)附录 (11)附录1 方案系统方框图 (11)附录2 制冷系统工作原理图 (11)附录3 系统硬件结构图 (11)附录4 系统软件设计流程图 (11)附录5 系统调试结构图 (11)附录6 89C51管脚图 (11)附录7 系统设计原理图 (11)1绪论1 本课题研究的背景从第一辆汽车生产出来到现在我们现在,汽车的发展已经有了一百多年,汽车内部的装置怎么进行改进,怎么进行创新,怎么让驾驶人还有乘坐人在车里面感觉的更加舒适现在是研究发展的重要方向。
使用单片机89C51控制步进电机程序详细介绍

使用单片机89C51控制步进电机程序详细介绍;步进电机控制程序例程p3.2 正转,p3.3 反转,p3.4停止。
步进电机接p0.0 p0.1 p0.2 p0.3;具体程序如下:org 00hstop: ORL p0,#0ffh ; 步进电机停止loop:jnb p3.2,for2 ; 如果p3.2 按下正转jnb p3.3,rev2 ; 如果p3.3 按下反转jnb p3.4,stop1 ; 如果p3.4按下停止jmp loop ;反复监测键盘for: mov r0,#00h ;正转到tab取码指针初值for1:mov a,r0 ;取码mov dptr,#table ;movc a,@a+dptrjz for ;是否到了结束码00hcpl a ;把acc 反向mov p0,a ;输出到p0开始正转jnb p3.4,stop1 ; 如果p3.4 按下停止jnb p3.3,rev2 ; 如果p3.3按下反转call delay ;转动的速度inc r0 ;取下一个码jmp for1 ;继续正转rev:mov r0,#05h ;反转到tab取码指针初值rev1:mov a,r0mov dptr,#table ;取码movc a,@a+dptrjz rev ;是否到了结束码00hcpl a ;把acc 反向mov p0,a ;输出到p0开始反转jnb p3.4,stop1 ; 如果p3.4 按下停止jnb p3.3,rev2 ; 如果p3.3按下反转call delay ;转动的速度inc r0 ;取下一个码jmp rev1 ;继续反转stop1:call delay ; 按p3.4 的消除抖动jnb p3.4,$ ; p3.4 放开否?call delay ;放开消除抖动jmp stopfor2:call delay ; 按p3.2 的消除抖动jnb p3.2,$ ; p3.2 放开否?call delay ;放开消除抖动jmp forrev2:call delay ; 按p3.3的消除抖动jnb p3.3,$ ; p3.3 放开否?call delay ;放开消除抖动jmp revdelay:mov r1,#40 ;步进电机的转速20ms d1:mov r2,#248 djnz r2,$djnz r1,d1rettable:db 03h,09h,0ch,06h ;正转表db 00 ;正转结束db 03h,06h,0ch,09h ;反转db 00 ;反转结束end。
基于AT89C51单片机电梯控制系统的设计
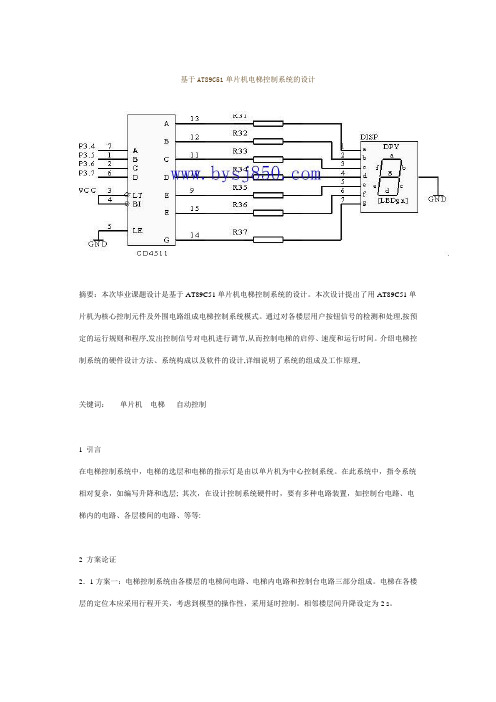
基于AT89C51单片机电梯控制系统的设计摘要:本次毕业课题设计是基于AT89C51单片机电梯控制系统的设计。
本次设计提出了用AT89C51单片机为核心控制元件及外围电路组成电梯控制系统模式。
通过对各楼层用户按钮信号的检测和处理,按预定的运行规则和程序,发出控制信号对电机进行调节,从而控制电梯的启停、速度和运行时间。
介绍电梯控制系统的硬件设计方法、系统构成以及软件的设计,详细说明了系统的组成及工作原理,关键词:单片机电梯自动控制1 引言在电梯控制系统中,电梯的选层和电梯的指示灯是由以单片机为中心控制系统。
在此系统中,指令系统相对复杂,如编写升降和选层; 其次,在设计控制系统硬件时,要有多种电路装置,如控制台电路、电梯内的电路、各层楼间的电路、等等:2 方案论证2.1方案一:电梯控制系统由各楼层的电梯间电路、电梯内电路和控制台电路三部分组成。
电梯在各楼层的定位本应采用行程开关,考虑到模型的操作性,采用延时控制。
相邻楼层间升降设定为2 s。
(1)各楼层的电梯间电路二、三楼的电梯间均有“上升”和“下降”选择按键,一楼只有“上升”按键,四楼只有“下降”按键,每个按键配一只发光二极管,作为指示灯。
(2)电梯内部电路目标楼层号1 –4选择按键。
每个按键配有相应指示灯。
(3)控制台电路①两个按键用于手动控制。
控制电梯的“开始运行”和“停止运行”。
②两个指示灯,分别指示电梯当前的升降情况。
③一只数码管,用于显示电梯当前所在的楼层。
2.2方案二:采用CPLD器件作为控制中心,对整个系统的运行进行统一管理,但这种方案要求平时有很多的知识积累和较强的专业水平,实现起来比较困难且器件较贵不符合经济要求,而且升降电机的控制,显示等还需要单片机的配合。
综上分析,方案一单片机比较合适此控制系统的要求。
所以我采用方案一。
3 各电路设计和论证3.1电源电路设计和论证3.1.1电源电路方案选择方案一:开关电源图1是开关电源电路硬件系统的原理图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于AT89C51单片机的变频调速控制系统设计1.概述在电气传动领域中,随着自关断器件技术水平的不断提高,脉宽调制技术(简称PWM 技术)也日趋成熟。
PMW交流变频调速以其高效率、高功率因数、输出波形好、结构简单等优点,在井下风机、水泵、造纸机等设备中得到了广泛的应用。
将单片机应用于交流变频调速系统,可有效地避免传统调速方案中的一些缺点,达到了提高控制精度的目的[1],其特点:(1)采用单片机可以使绝大多数控制逻辑通过软件实现,简化了电路。
(2)单片机具有更强的逻辑功能,运算速度快,精度高,有大容量的存储单元,可以实现较为复杂的控制。
(3)无零点漂移,控制精度高。
(4)可以提供人机界面,多机连网工作。
根据国内外有关变频调速的最新研究成果及研究动向,参阅大量的文献、资料,本着先进性与成熟性兼顾、标准化、可靠性、连续性、及时性的系统设计原则,设计了如图1所示的系统结构框图。
图1系统结构框图图2整流电路整个电路分为三大部分:主回路、驱动电路以及用单片机控制PWM产生器的控制电路,另外还有过流检测和保护电路,这样使得系统工作更稳定、可靠。
2.系统主回路设计2.1整流滤波电路的设计为了给逆变器提供一个稳定的直流电压,需要将电网输入的交流电进行整流。
通常整流电路可分为可控整流和不可控整流。
可控整流可以使系统的功率因数接近l,并且具有较小的纹波,频率高,可降低较小幅值的滤波电容。
但是采用可控整流电路会使得系统成本上升,并且控制电路复杂。
目前比较经济可靠的方案,一般都是采用二极管整流,使电网功率因数与逆变输出电压无关而接近于1。
在本系统中,我们采用了三相二极管不可控整流,如图2所示,采用它无需控制电路驱动,电路简单、可靠,成本低,缺点就是纹波较大,需采用较大幅值的滤波电容。
2.2三相逆变电路的设计三相交流负载需要三相逆变器,在三相逆变电路中,应用最广的是三相桥式逆变电路[2]。
采用IGBT作为可控元件的电压型三相逆变电路如图3所示,可以看出电路由三个半桥组成。
图3三相逆变电路图4IR2110驱动半桥电路电压型三相逆变桥的基本工作方式与单相逆变桥相同,是导电方式,即每个桥臂的导电角度为,同一相(同一半桥)上下两个臂交替导电,各相开始导电的时间依次相差。
这样,在任一瞬间,将有三个桥臂同时导通。
可能是上面一个臂,下面两个臂,也可能是上面两个臂下面一个臂同时导通。
因为每次换流都是在同一相上下两个桥臂之间进行的,因此,也被称为纵向换流。
用T记为周期,只要注意三相之间互隔T/3(T是周期)就可以了,即B相比A相滞后T/3,C相又比B相滞后T/3。
具体的导通顺序如下:第1个T/6:V1,V6,V5导通,V4,V3,V2截至;第2个T/6:Vl,V6,V2导通,V4,V3,V5截至;第3个T/6:V1,V3,V2导通,V4,V6,V5截至;第4个T/6:V4,V3,V2导通,V1,V6,V5截至;第5个T/6:V4,V3,V5导通,V1,V6,V2截至;第6个T/6:V4,V6,V5导通,V1,V3,V2截至。
3驱动电路及系统保护电路的设计3.1驱动电路的设计作为功率开关器件,IGBT的工作状态直接关系到整机的性能,所以选择或设计合理的驱动电路显得尤为重要。
采用一个性能良好的驱动电路,可使IGBT工作在比较理想的开关状态,缩短开关时间,减小开关损耗,对提高整个装置的运行效率,可靠性和安全性都有重要的意义。
驱动电路必须具备两个功能:一是实现控制电路与被驱动IGBT栅极的电隔离;二是提供合适的栅极驱动脉冲[3]。
对驱动电路的要求,可归纳如下:1)IGBT和MOSFET都是电压驱动,都具有一个2.5~5V值电压,有一个容性输入阻抗,因此IGBT对栅极电荷非常敏感,故驱动电路必须很可靠,要保证有一条低阻抗值的放电回路,即驱动电路与IGBT的连线要尽量短。
2)用内阻小的驱动源对栅极电容充放电,以保证栅极控制电压Uge,有足够陡的前后沿,使IGBT的开关损耗尽量小。
另外,IGBT开通后,栅极驱动源应能提供足够的功率,使IGBT 不退出饱和而损坏。
3)驱动电路要能传递几十kHz的脉冲信号。
4)在大电感负载下,IGBT的开关时间不能太短,以限制出di/dt形成的尖峰电压,确保IGBT的安全。
5)IGBT的栅极驱动电路应尽可能简单实用,最好自身带有对IGBT的保护功能,有较强的抗干扰能力。
本文采用美国IR公司推出的IR21lO集成驱动器来驱动IGBT,它兼有体积小,速度快,电路简单的优点,是中小功率变换装置中驱动器件的首选品种。
驱动芯片IR2110用于驱动半桥电路如图4所示。
3.2电流检测及过流保护电路当流过IGBT的电流过流,一旦超出安全区,IGBT将永久损坏,因此系统要设置电流过流保护电路,系统在变频器的直流部分串电流互感器将电流转换为电压信号再通过比较器比较,将过流信号检测出来后,送到SA828l的脉冲封锁端(电平信号),那么SA828l就会停止输出PWM脉冲,以保护IGBT。
IGBT的过电流保护电路如图5所示。
查看原图(大图)图5IGBT的电流保护电路其中运放C814组成电压跟随器,其输入来自电流互感器的输出。
两个电压比较器C271组成窗口电压比较器,比较器的输出经施密特反相器连接到与门的输入端。
当IGBT没有过电流时,C814的输入电压比较低,窗口电压比较器输出高电平,因此EN信号为高电平,使IGBT驱动信号有效;反之,当IGBT 过电流时,EN信号变为低电平,封锁了IGBT驱动信号而使IGBT关断,调节电位器RP,可以改变过流阀值的大小。
过压保护电路的原理与电流保护电路类似,另外在主电路上应配装一个10A的快速熔断保险,当电路发生严重过流时,快速熔断保险烧断切断电网电源,尽可能的保证主电路的安全。
4.控制电路软硬件设计三相SPWM发生器是控制电路的核心部分。
在本设计中,我们选用了AT89C51单片机控制英国MITEL公司的专用集成芯片SA8281作为SPWM 波形发生器,该芯片与微处理器接口方便,几乎不用加任何的逻辑电路即可构成完整的SPWM控制电路,结构紧凑,提高了系统的集成度和可靠性,利于降低成本。
4.1SA8281的功能介绍SA8281芯片是MITEL公司设计的专门为交流电机的调速控制,UPS电源以及其他需要脉宽调制作为一种有效电源控制的电力电子器件[4]。
引脚如图6所示:图6SA8281的引脚排列图7单片机与SA8281连接图它可用于三相PWM波形产生的可编程微机外围接口芯片,使用一组标准的MOTEL总线,适用于英特尔和摩托罗拉二种总线接口,接口通用性好,编程和操作简单,方便,快捷。
SA8281采用常用的对称的双边缘采样法产生全数字化PWM波形,无时漂,无温漂,具有很高的精度和温度稳定性。
有6个标准的TTL电平输出,用来驱动逆变器的6个功率开关器件。
工作频率范围宽,精度高,三角载波频率可调。
工作方式灵活,在电路不变的情况下,直接通过软件设定载波频率、调制频率、调制比、最小脉宽、死区时间等工作参数就可改变逆变器的性能指标,驱动不同负载或工作于不同工况。
可通过改变输出SPWM脉冲的相序实现电机的正反转,通过调制达到输出频率为OHz 而给电机绕组通一直流电,实现电机的“直流插入制动”。
独立闭锁端可瞬时闭锁输出SPWM脉冲,可处理电机突发情况的发生。
波形存储在内部ROM中,可以选择可删除的最小脉宽和死区时间。
4.2控制硬件电路的实现控制电路部分采用的单片机为ATMEL公司推出的AT89C51,它采用CMOS结构,耗能低,抗干扰能力强,与MCS一5l系列完全兼容,且功能比一般的51系列芯片要强大许多。
其内部含有128字节的RAM和4K字节的EPROM完全满足系统需要,不用外加RAM 或EPROM存放数据或程序,但需要设定和保存的参数则存放在一片EEPROM中[5]。
正弦波发生器的原理图如图7所示,它以SA828l作为三相正弦波的发生芯片,单片机AT89C51作为SA8281的控制芯片。
SA828l将大部分外围电路都集成在芯片内部,可以看出SA8281与微处理器接口简单,控制电路非常简单,结构紧凑,这样做从另一方面来讲对芯片工作的稳定性有很大帮助,提高了可靠性。
从整个电路来说,实现对SA828l的控制是通过按键输入相应的信息。
本电路的设计要对SA8281输入初始化参数和控制参数,所以用到了三个按键0#键、1#键和2#键。
在主程序中判断键号用的是查询式,0#键按下转入初始化子程序:l#键按下转入加速子程序:2#键按下转入减速子程序。
AT89C51是地址与数据总线复用类的单片机,为了隔离潜在的噪音干扰,设置输出断开引脚SETTRIP在通常情况下接地,同时设置了开关,便于在紧急情况下迅速关断所有PWM输出;为使PWM 输出处于有效状态,输出关断引脚接高电平[6]。
外部时钟CLK 引脚接独立的12M有源晶振为SA8281芯片提供一时钟基准用于控制与PWM有关的各时序。
4.3控制电路软件设计对SA8281芯片的控制是通过微处理器接口将相应的参数送入芯片内部两24位的寄存器R4、R3来实现的,它们是初始化寄存器和控制寄存器。
数据先被读入一系列临时寄存器R0~R2中,然后通过一条虚拟的写操作将数据传送至相应的R4,R3寄存器。
初始化寄存器用于设定和电机及逆变器有关的一些基本参数。
在正常情况下,这些参数在电机工作前就被初始化(例.在PWM输出允许前),并且在电机工作时一般不允许改变。
控制寄存器在工作过程中控制输出脉宽调制波的状态,从而进一步控制电机的运行,比如转速、正/反转、启动和停止等。
通常在电机工作时该寄存器内容经常被改写以实现对电机的实时控制。
程序流程图下面分别进行说明:4.3.1主程序主程序判断键号用的是查询式:O#键按下转入初始化子程序;1#键按下转入加速子程序;2#键按下转入减速子程序。
另外为了防止误操作增加了延时去抖动的再次判断键号环节。
主程序流程图如图8所示:图8主程序流程图图9SA8281初始化子程序流程图4.3.2初始化子程序在初始化子程序要设定的是与电机和变频器有关的基本参数,包括载波频率的设定、调制波频率范围设定、脉冲延迟时间设定、最小删除脉宽的设定、调制波形选择、幅值控制设定等。
初始化寄存器的数据先以8位格式存入临时寄存器R0,R1和R2中,然后通过虚拟写操作R4再被存入初始化寄存器。
通常情况下,这些参数在电机工作过程中不要改变。
SA8281初始化子程序流程如图9所示:4.3.3调速子程序调速子程序包括加速子程序和减速子程序,本文只介绍加速子程序,减速子程序类似于加速子程序。
加速子程序流程图如图9所示,控制参数包括调制波频率控制字和调制波幅值控制字,它们要通过计算求得,方法:首先根据电机的U/F曲线得到调制波的频率与幅值,然后通过公式计算出相应的控制字并制成表格,本文的程序设计中利用查表法实现两种控制参数的传送。