结晶器出钢拉速系统的SIMULINK 优化实现
邯钢连铸工题库

邯钢连铸工题库河北钢铁杯职工职业技能大赛连铸工试题库(1309题)一、判断题1、钢中含磷高,会引起钢在低温时的韧性大为降低,引起“热脆”。
( ) ³2、冷却水喷咀的性能,不会影响铸坯质量和拉坯速度。
( ) ³3、事故冷却水的水量应不小于正常水量的1。
( ) ³4、适当降低过热度的浇注温度,可缩小铸坯中的柱状晶区,扩大等轴晶区。
( ) √5、所谓固相矫直是指铸坯进入矫直区域已全部凝固时进行的矫直。
( ) √6、对涂料中间包要求耐热冲击性好,当从室温快速加热到1700℃时不炸裂,不剥落。
( ) ³7、对于大断面带液芯矫直的铸机,采用多点矫直比采用一点矫直好。
( ) √8、二冷区冷却比按每吨铸坯消耗的冷却水体积衡量。
( ) √9、钢水由液态变成固态的过程,必须满足一个条件,即一定的过冷度。
( ) √10、钢水在中包内的最佳停留时间为5min。
( ) ³11、钢液过冷度大,形核速度大于长大速度。
( ) √12、连铸结晶器冷却水质要求比二冷水要求高。
( ) √13、连铸坯按铸坯断面分类有方坯、板坯、园坯、异型坯。
( ) √14、连铸坯常见的表面缺陷有鼓肚、扭曲、菱变。
( ) ³15、随着保护渣中碳含量的增加,保护渣的熔化速度加快。
( ) ³16、随着冶炼过程的进行,脱碳速度将越来越快。
( ) ³17、结晶器的铜板镀Ni是为了提高导热性能。
( ) ³18、铸坯振痕深度与结晶器振动负滑脱时间有关,负滑脱时间越短,振痕深度越深。
( ) ³19、结晶器冷却水较二冷区冷却水压力低。
( ) ³20、沸腾钢比镇静钢的表面质量好,但成材率低。
( ) ³21、刚玉、高铝和粘土质耐火材料的区别在于SiO2成份的含量不同。
( ) ³22、钢包保护套管的作用是改善劳动条件。
基于MatlabSimulink双闭环调速系统设计及仿真

图5转速环的阶跃扰动响应曲线
4结 论
本文通过直流电机转速、电流双闭环调速系统
采用最平幅频法设计双闭环调速系统的电流调节器提出了具体的设计方法和步骤并通过大量的计算得出了一系列通用设计公式为了使设计人员设计简便还运用数学工具给出了设计图表最后与工程设计法设计的系统性能指标进行了对比结果表明该文的设计方法性能指标好
第25卷第3期 2007年05月
佳木斯大学学报(自然科学版) Journal of Jiamusi University(Natural Science Edition)
to modify the parameter of PID controller online by using the ruler of fuzzy control,then this controller iS realized by
means of software of SmmUNK and fuzzy—control logic toolbox.
删X/ang—don91,CZ弘UVG Jian91”,2Z已批Chong—hui3,W-批Shu—yun2’4
(1.College of Mechanical Fagineering,Jiamud University,Jiamusl 154007,China;2.School of Meehaniml and Electronic EnCnea-irg.
数学模型,对电流调节器和转速调节器进行的设
计,选择了调节器的类型,给出了系统动态结构图
优化Simulink模型中的参数
Simulink Response OptimizationSimulink Response Optimization——用于优化Simulink模型中的参数Simulink Response Optimization是一个在Simulink模型中调节设计参数的工具,它与Simulink模型结合在一起,根据用户定义的时域内的性能指标约束,自动优化系统参数。
利用该工具,可以对标量形式、矢量形式以及矩阵形式的变量进行优化,并可对任意层次的模型进行变量约束。
Simulink Response Optimization支持连续、离散以及多速率的模型,并可以通过蒙特卡罗仿真处理模型中的某些不确定量。
通过Simulink Response Optimization可以处理一系列优化问题,比如调节多入多出系统参数,对非线性系统设计自适应控制器,优化模型中的物理参数以降低系统能耗、调节滤波器参数等等。
Simulink Response Optimization还可以用于查表调节以及增益的调整等方面。
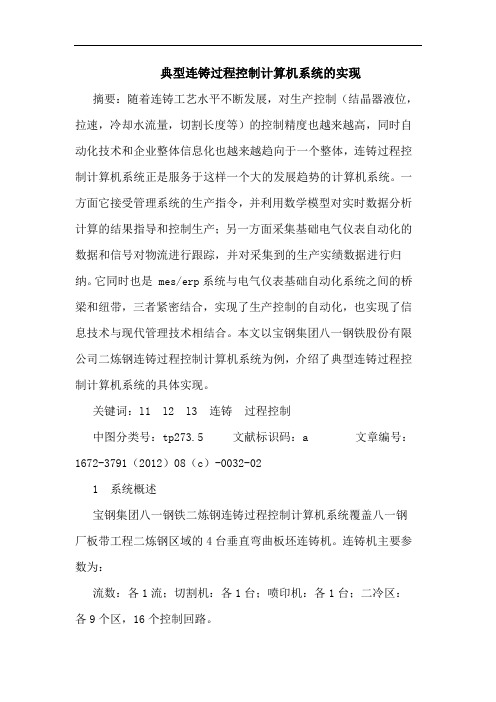
特点为优化问题的建立和管理提供了图形用户界面提供优化程序用于调节标量、矢量或矩阵参数支持用户自定义的信号约束和期望输出用于指定系统的响应支持蒙特卡罗仿真,对具有模型不确定性的问题提供了更强的鲁棒调节能力强大功能Simulink Response Optimization提供了一个图形用户界面用于在Simulink模型中调节参数。
用户可以随时停止仿真以找回中间结果,调整优化问题,改善收敛性。
可以利用图形用户界面调节所有的参数并可以在仿真中断处重新开始参数调节过程。
利用GUI,可以实现:选择模型中的信号选择和调节参数选择要调节的变量确定模型的不确定量设置仿真和优化选项选择信号可以在模型的任意信号处加入Signal Constraint模块进行信号的选择。
Signal Constraint模块可以通过图形化约束的方式描述期望的系统响应或者也可以通过确定参考信号的输出来描述优化约束。
典型连铸过程控制计算机系统的实现
典型连铸过程控制计算机系统的实现摘要:随着连铸工艺水平不断发展,对生产控制(结晶器液位,拉速,冷却水流量,切割长度等)的控制精度也越来越高,同时自动化技术和企业整体信息化也越来越趋向于一个整体,连铸过程控制计算机系统正是服务于这样一个大的发展趋势的计算机系统。
一方面它接受管理系统的生产指令,并利用数学模型对实时数据分析计算的结果指导和控制生产;另一方面采集基础电气仪表自动化的数据和信号对物流进行跟踪,并对采集到的生产实绩数据进行归纳。
它同时也是 mes/erp系统与电气仪表基础自动化系统之间的桥梁和纽带,三者紧密结合,实现了生产控制的自动化,也实现了信息技术与现代管理技术相结合。
本文以宝钢集团八一钢铁股份有限公司二炼钢连铸过程控制计算机系统为例,介绍了典型连铸过程控制计算机系统的具体实现。
关键词:l1 l2 l3 连铸过程控制中图分类号:tp273.5 文献标识码:a 文章编号:1672-3791(2012)08(c)-0032-021 系统概述宝钢集团八一钢铁二炼钢连铸过程控制计算机系统覆盖八一钢厂板带工程二炼钢区域的4台垂直弯曲板坯连铸机。
连铸机主要参数为:流数:各1流;切割机:各1台;喷印机:各1台;二冷区:各9个区,16个控制回路。
铸机拉速范围:0.25~2.5m/min;铸机工作拉速:1.0~1.6m/min;板坯厚度:220mm,板坯宽度:750~1600mm;板坯长度:7500~10500mm;板坯最大单重:28.8t/块。
该连铸过程控制计算机服务器硬件配置为2台高性能双路双模块冗余机架式容错服务器,其中一台为在线服务器,一台为备份服务器,磁盘采用阵列形式,采用共享磁盘管理技术,提高磁盘的可靠性,防止数据的丢失,减少系统切换的时间。
数据库数据存放在共享磁盘阵列上,在线服务器和备份服务器共享数据库数据,保证了服务器切换的速度和数据的一致。
服务器部署在l2中心机房,各个连铸电气室和操作室的边缘交换机通过多模光缆连接到l2中心机房的核心交换机,实现连铸过程控制计算机服务器与l1系统以及现场操作终端的网络互联。
simulink 用法 -回复
simulink 用法-回复Simulink是一种可视化编程环境,用于模型建立、仿真和分析动态系统。
它是MATLAB的一部分,可以帮助工程师和科学家以直观的方式设计和模拟各种系统,如控制系统、信号处理、通信系统等。
本文将详细介绍Simulink的基本用法,以便读者能够逐步理解并掌握这一强大工具。
第一步:启动Simulink在MATLAB主界面中,点击"Simulink"标签即可启动Simulink环境。
启动完成后,将出现一个空白的模型窗口。
第二步:创建模型在模型窗口上方的工具栏中,有各种工具和选项,可以用来创建模型。
点击工具栏上的“新建模型”按钮,或使用快捷键Ctrl+N,即可创建一个新的模型。
第三步:添加组件在创建的模型中,可以添加各种组件以构建系统模型。
选择工具栏上的“库浏览器”按钮,或使用快捷键Ctrl+L,将打开一个库浏览器窗口。
库浏览器中包含了大量的组件库,如信号库、连续库、离散库等等。
浏览并选择合适的组件,然后将其拖动到模型窗口中。
第四步:连接组件将各个组件拖动到模型窗口后,接下来需要将它们连接在一起。
在模型窗口中,鼠标指针变为十字箭头时,可以用鼠标左键单击并拖动来连接组件。
连接时,会出现连线和箭头,表示信号的流动方向。
第五步:设置参数添加组件并连接后,还需要为每个组件设置相应的参数。
选择某个组件,右键单击,选择“块参数”或“模型参数”选项,即可打开相应的参数设置对话框。
在对话框中,可以设置组件的各种属性,如名称、输入输出端口、初始值等等。
第六步:运行模型设置完参数后,即可运行模型进行仿真。
点击模型窗口上方的“运行”按钮,或使用快捷键Ctrl+T,将执行仿真操作。
在仿真过程中,可以观察模型的动态行为,如输入输出信号的波形变化。
仿真完成后,将在模型窗口中显示仿真结果。
第七步:分析结果仿真完成后,可以使用Simulink提供的分析工具进行结果分析。
选择模型窗口上方的“分析”标签,将打开分析工具箱。
结晶器总结
一.大方坯连铸机管式结晶器的应用实践结论(1)管式结晶器的应用不需要大量的设备改进和工艺改进,容易实施;(2)管式结晶器同板式结晶器相比,使用寿命提高,最长在线时间达384h,最高过钢量达2. 34万t以上。
(3)应用管式结晶器能显著提高铸坯表面质量,表面缺陷率降低,冷疤完全消除。
(4)管式结晶器对铸坯外形尺寸合格率的提高有一定作用,对内部质量的影响同板式结晶器相比没有明显的变化,能够适应铸机生产的需要。
二.吹氩板坯连铸结晶器内夹杂物去除的数值模拟结论(1)采用准单相模型和离散相模型可以描述水空气夹杂模拟物体系和钢液氩气夹杂物体系夹杂物行为和去除率,夹杂物去除率与物理模拟结果趋势一致,表明采用这一数值模拟方法是可行的.(2)对所研究的结晶器条件,吹氩有利于夹杂物上浮去除,时间足够长时,上浮率等于去除率. 对相同气量6.0 L/min,夹杂物在拉速 1.3 m/min 时去除率最低. 对相同拉速1.2 m/min,存在临界气量9.0 L/min,在临界气量以下,吹氩可增加夹杂物上浮率,减小进入铸坯率;在临界气量以上,夹杂物上浮率减少,进入铸坯率增大.三、高效连铸下的结晶器优化结论通过结晶器参数的优化实践可以得出以下结论:(1)单一锥度结晶器不能适应以高拉速为特征的高效连铸,采用抛物线锥度是解决这一矛盾的有效途径。
同时注意,抛物线锥度要适应不同钢种的要求,且锥度不能过小。
(2)钢管镀层的好坏,直接影响到结晶器的寿命,为此要加强镀层监控,使其达到技术要求。
(3)上压盖内卡式密封能够有效地减小铜管上口变形,防止漏水事故。
四、结晶器通关在使用中存在的问题及分析结论通过对润滑油的严格控制、结晶器总成的改进和振动台的校正,基本消除了连铸过程中存在的问题,铜管平均过钢量超过35(X)t。
影响结晶器铜管正常使用除自身因素外,结晶器总成设计是否合理、制造精度和振动参数等直接关系到铸坯质量与生产效率五、结晶器液压振动技术在梅山高效连铸中的应用结论(l)结晶器非正弦液压振动通过由不同的上振和下振曲线相互组合构成来实现下振时间短、速度快,上振时间长、速度慢这一振动工艺的要求,在控制振痕深度上等同于高频振动,在影响结晶器保护渣消耗上等同于低频振动,从而克服了正弦振动的不足之处,为高效连铸创造了条件。
基于MATLABSIMULINK永磁同步电动机调速系统的建模与仿真
毕业设计题目名称基于MATLAB/SIMULINK永磁同步电动机调速系统的建模与仿真系别电气信息工程系专业/班级电气工程及其自动化07102班学生学号指导教师(职称)摘要在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(SVPWM)技术使得交流电机能够获得和直流电机相媲美的性能。
永磁同步电机(PMSM)是一个复杂耦合的非线性系统。
本文在Matlab/Simulink环境下,通过对PMSM本体、d/q坐标系向a/b/c坐标系转换等模块的建立与组合,构建了永磁同步电机控制系统仿真模型。
仿真结果证明了该系统模型的有效性。
关键词:Matlab/Simulink;永磁同步电机;电压空间矢量脉宽调制;仿真AbstractIn today’s AC s ervo system, the vector control theory and SVPWM technique make the AC motor can achieve the performance as good as DC motor when designing the AC servo system. PMSM is a nonlinear system with significant coupling. This novel method for modeling and simulink of PMSM system in Matlab is proposed. In Matlab /Simulink, the isolated blocks, such as PMSM block, coordinate transformation from d/q to a/b/c block, etc, have been modeled. The reasonability and validity have been testified by the simulate result.Key words:Matlab/Simulink; PMSM; SVPWM; simulation目录摘要 (I)Abstract (II)目录 (III)第1章绪论............................................................. - 1 - 1.1选题背景及意义...................................................... - 1 - 1.2本课题的研究现状及前景.............................................. - 1 -1.2.1相关发展....................................................... - 2 -1.2.2永磁同步电动机的运行控制方法................................... - 3 -1.2.3永磁同步电动机在现代工业中的应用............................... - 4 -1.2.4 永磁同步电动机的应用前景..................................... - 6 - 第2章永磁同步电动机系统原理.......................................... - 8 - 2.1 永磁同步电动机的基本组成............................................ - 8 -2.1.1 电动机........................................................ - 8 -2.1.2 转子位置传感器................................................ - 9 -2.1.3 逆变器........................................................ - 9 - 2.2永磁同步电动机的工作原理........................................... - 10 -2.2.1电枢反应...................................................... - 11 - 2.3 永磁同步电动机的数学模型........................................... - 14 - 第3章正弦波永磁同步电动机的调速系统.................................. - 18 -3.1正弦波永磁同步电动机的调速原理..................................... - 18 - 3.2正弦波永磁同步电动机调速系统....................................... - 20 -3.2.1主回路的组成和控制............................................ - 20 -3.2.2控制回路及系统工作原理........................................ - 23 - 第4章正弦波永磁同步电动机调速系统的建模与仿真........................ - 24 - 参考文献............................................................... - 30 - 结束语................................................................. - 31 - 致谢................................................................. - 32 -第1章绪论1.1选题背景及意义众所周知,直流电动机有优良的控制性能,其机械特性和调速特性均为平行的直线,这是各类交流电动机所没有的特性。
matlab simulink 动力学问题

matlab simulink 动力学问题动力学问题是指研究物体运动、运动规律和动力学关系等方面的问题。
在工程领域中,动力学问题广泛运用于机械设计、控制系统设计、车辆动力学、机器人运动控制等方面。
Matlab Simulink是一款基于图形模型的设计与仿真环境,可以用于解决动力学问题。
Simulink提供了一种直观的、图形化的方式,允许用户将复杂的系统划分为多个模块,并通过信号连接这些模块,从而构建整个系统的模型。
用户可以在模型中定义系统的数学公式、边界条件、初始条件等,并基于这些模型进行仿真、分析和优化。
在动力学问题中,常常用到的公式包括牛顿第二定律、动量定理、角动量定理、能量守恒定律等。
以机械系统为例,当我们考虑一个物体受到外力作用时的运动情况时,可以利用牛顿第二定律来描述物体的运动规律。
根据牛顿第二定律,物体受力的大小与所受的加速度成正比,反方向与加速度相同。
因此,在Matlab Simulink中,我们可以通过建立物体的模型,在模型中加入受力的作用,并通过求解运动方程来得到物体的运动状态。
例如,考虑一个简单的弹簧振子系统,该系统由一个质量为m的物体和一个弹簧组成。
弹簧的劲度系数为k,物体受到地球引力的作用。
我们可以建立如下的模型来描述该系统的动力学问题:-建立物体的动力学方程:F = m*a,其中a表示物体的加速度,F表示作用在物体上的合力。
合力包括地球引力和弹簧的作用力,分别由mg和-kx表示,其中g表示地球的重力加速度,x表示弹簧的位移量。
-通过求解动力学方程,可以得到物体的加速度,进而得到物体的速度和位移。
在Simulink中,我们可以通过建立一个模块化的系统模型,将这些步骤一一对应地实现。
具体步骤如下:1.在Simulink中创建一个新模型。
2.在模型中添加一个纵向布局的框架,用于容纳其他模块。
3.添加一个输入信号,用于控制模型的运行时间。
4.添加一个数学运算模块,用于计算物体受力大小。
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
结晶器出钢拉速系统的SIMULINK优化实现

捷实用 的办法 。19 90年 Ma rs 件公 司为 MA L B提 t Wok 软 h TA 供 了新 的控 制 系统 模 型 图输 入 与仿 真 工 具 , SMU N 即 I L K。 I 接 ) I LN 。SMU I K是可视化动态 面向结 构的 系统仿真 环境或
ma to a e npo e O b i l n rcia l ysmuain a d lc e a ay i. d b sd s tep p r lmeh dh sb e rv d t e s mpe a d pa t be b i lt n o a n ss An e ie , a e c o l l h dsu ssbif eP D rP o t lS MU I ic se r l t I o Ic nr , I L NK i lt n,t ne a ue AC moo e trc nrlmo e n e yh o smuai IAE itg lrl , trv co o to d la d o r
Op i z t n o h o l p i g Veo i y t m s d o I ULI t mia i ft e M u d Ta p n lc t S se Ba e n S M o y NK
QA u — i,O G C a — a ,U i kn I O G o l T N ho nn S NY — ag n
参数优化方法。仿真与现场分析表 明 r 该方法简捷 、 实效 、 可靠。除此 之外 , 还就 PD 制 。I U I K仿真 。A I控 S LN M I E积分准则, I
基于Matlab_SimuLink直流调速控制系统

降阶处理后近似为 :
WCLi ( s ) ≈
在一般情况下 , 希望超调量 σ %<5% , 由表 1 可取 阻尼比 ξ =0.707 ,
表 1 典型 I 型系统动态跟随性能指标与参数的关系
γ ω Á
因此
TÁ R R T (3.4) ( Á ) = 0.5 1K β T Kβ T ∑ ∑ (2)转速调节器的设计 : 为了简化系统, 在此内电流环建成后, 必须进行 K =
2 双闭环直流调速系统原理图
在单闭环调速系统动态数 学模型的基 础上 , 考虑 双闭环控制的结构, 可绘出电流、 转速双闭直流调速 系统的动态结构图 , 如图 1 所示。
3 调节器的工程设计方法
校正环节的设计方法很多 , 而且是很灵 活的 , 用 经典的动态校正方法设计调节器须同时 解决稳、准、 快、抗干扰等各方面相互矛盾的静动态性 能要求 , 需 要设计者具有扎实的理论基础 , 丰富的 实际经验和 熟 练的设计技巧。这样初学者往往不易 掌握 , 在工程 应 用中也不很方便。于是便产生建立更简便实用的工程 设计方法。
(唐山学院 )向
波 廉文利 朱全印
Xiang ,Bo Lian ,Wenli Zhu ,Quanyin
摘要 : 本 文 介 绍 了 基 于 工 程 设 计 方 法 对 直 流 调 速 系 统 的 设 计 , 并 利 用 Matlab/Simulink 进 行 建 模 与 仿 真 研 究 , 最 后 显 示 控 制 系 统仿真结果。 关键词 : 调节器 ;SimuLink; 转速环 文献标识码 :B 中图分类号 :TP273
(1)电流调节器的设计 :
实际系统中往往有一些小 时间常数的 惯性环节 , 它们的倒数都处于对数频率特性的高频段 , 对它们 作 近似处理不会显著地影响系统的动态性能。故当系统 有多个小惯性环节时, 在一定条件下, 可以将它们近 似看成一个小惯性环节 , 其时间常数等 于原系统各 小 时间常数的和。经过小惯性环节的处理 , 并且忽 略反 电动势对电流环的影响 , 再假定为 理想空载即 Idl=0 , 得电流环简化结构图 2 所示 ,
matlab simulink 动力学问题

matlab simulink 动力学问题Matlab Simulink(以下简称Simulink)是一种用于建模、仿真和分析工程和科学系统的软件环境。
它允许工程师和科学家使用图形化界面来创建复杂的系统模型,并通过模拟系统的动态行为来预测其性能。
在本文中,我们将关注Simulink在动力学问题中的应用。
动力学是关于物体运动和力的研究领域,它研究物体如何根据所受的力而运动。
在工程和科学领域,动力学问题广泛存在于各种系统中,如机械系统、电气系统、热力系统等。
通过使用Simulink,我们可以更轻松地建立和分析这些系统的动力学模型,并对其行为进行仿真。
在Simulink中建立动力学模型的第一步是选择适当的块来表示系统的各个组成部分。
Simulink提供了大量的预定义块,可以用来表示不同类型的物体、力和传感器等。
对于机械系统,我们可以使用质点、弹簧、阻尼器等块来描述物体的运动和所受的力。
对于电气系统,我们可以使用电容器、电感器、电阻器等块来表示电路中的元件和电流。
一旦选定了适当的块,我们就可以使用连接线将它们连接起来,以表示系统中各个组成部分之间的相互作用。
连接线表示数据流和能量传递。
例如,在机械系统中,我们可以使用连接线将质点的位置、速度和加速度输入到力的块中,以计算物体所受的力。
在电气系统中,我们可以使用连接线将电路中的电流和电压信号传递给各个元件。
一旦我们建立了动力学模型,我们就可以在Simulink中对其进行仿真。
Simulink提供了强大的仿真工具,可以模拟系统在不同条件下的动态行为。
我们可以设置仿真的时间和步长,并观察系统在不同时间点的状态。
例如,在机械系统中,我们可以观察质点的位置、速度和加速度随时间的变化,并根据仿真结果评估系统的性能。
在电气系统中,我们可以观察电路中电流和电压的变化,并验证电路的稳定性和效率。
Simulink还提供了分析和优化动力学模型的工具。
我们可以使用Matlab的工具箱来更深入地分析仿真结果,并根据需要进行模型参数的优化。
北京科技大学材料成形自动控制基础复习要点
第一、二章1.系统定义:由相互作用和相互依赖的若干组成部分结合成的具有特定功能的有机整体。
(1) 包含若干部分(2) 各个部分之间存在某种联系(3) 具有特定的功能。
控制对象:泛指任何被控物体(不含控制器)。
控制:使某个控制对象中一个或多个输出量随着时间的推移按照某种预期的方式进行变化。
实现:靠控制系统去完成。
开环系统:不存在稳定性问题,控制精度无法保证。
闭环系统:可实现高精度控制,但稳定性是系统设计的一个主要问题。
2.实现闭环控制的三个步骤一是对被控量(即实际轧出厚度或压下位置)的正确测量与及时报告;二是将实际测量的被控量与希望保持的给定值进行比较、PID计算和控制方向的判断;三是根据比较计算的结果,发出执行控制的命令,使被控量恢复到所希望保持的数值上。
闭环控制系统的基本组成和要求(1)被控对象(2)被控量(3)干扰量(或叫扰动量)(4)自动检测装置(或叫自动检测环节) (5)给定量(或叫给定值)(6)比较环节(7)调节器(8)执行控制器古典控制策略主要包括:PID控制、Smith控制和解耦控制。
古典控制策略的应用要满足下面几个条件:(1) 系统应为线性定常系统;(2)系统的数学模型应比较精确;(3) 系统的运行环境应比较稳定。
PID算法的特点PID算法综合了系统动态过程中的过去、现在以及将来的信息PID算法适应性好,有较强的鲁棒性PID算法有一套完整的参数设计与整定方法PID控制能获得较高的性价比对PID算法的缺陷进行了许多改良形成具有实用价值的复合控制策略PID控制的显著缺点是不适于具有大时滞的被控系统( G(s)e- s )变参数及变结构的被控系统系统复杂、环境复杂、控制性能要求高的场合3.PID控制完全依靠偏差信号调节会带来很大调节延迟。
对偏差信号进行比例、积分和微分调节运算称为PID控制,它可以提高控制品质。
这是将偏差放大或通过微分给与短时间的强烈输出,加快启动,减少死区。
积分是将偏差累积起来,进行调整,达到消除静差的目的。
结晶器在线调宽液压伺服系统仿真分析与试验研究
3. Xian Qingan Electric Control Co., Ltd., Xian 710077, China)
Abstract: In this paper, the stress analysis of the mold narrow surface clamping device under the condition of mold online width adjustment of
1
Vm
y
4
dy =
AK s
Vc
3
B1
L ——— 钢水液面到窄边最后一个足辊中间
四组拉杆的拉力来调节宽边夹紧力,在设计要求的预
边铜板装置分别通过上口和下口两组伺服液压缸连接
m
式中 K s ——— 凝固系数;
两套带四组调宽伺服液压缸的窄边铜板装置,设备结
构图如图 1 所示 [2] 。 结晶器宽边铜板通过四组拉杆夹
置末端形成位置闭环。 液压伺服控制系统由于其无级
调速,结构紧凑且位置闭环精度高等优势,液压伺服在
线调宽在现代连铸机中得到迅速推广
[7-10]
1 结晶器窄边装置载荷分析
。
力最为复杂 [1,10] ,下面着重分析该工况下窄边铜板上
侧液压缸的受力 F 1 。
(1) 铸坯对窄边铜板的推力 F s 。
Fs =
足要求且液压缸跟随性良好;同时给出了现场调试过程中结晶器单侧窄面上下调宽液压缸位移关系,对后续研究结晶器在线调宽液
压伺服系统具有重要指导意义。
关键词: 板坯结晶器;在线热调宽;液压伺服系统;试验
结晶器出钢拉速系统的SIMULINK 优化实现
收稿日期:2005-01-24第23卷 第3期计 算 机 仿 真2006年3月文章编号:1006-9348(2006)03-0145-04结晶器出钢拉速系统的SIMULINK 优化实现乔国林,童朝南,孙一康(北京科技大学信息学院,北京100083)摘要:PID 或PI 控制器参数之间的匹配关系,一直是PID 控制算法所研究的问题。
该文提出了一种基于SIMULINK ,借助于最小平方优化函数lsgnonlin ,遵循ItAE 积分准则,针对于像结晶器出钢拉速的动态扰动,多变结构系统的PID 或PI 控制器参数优化方法。
仿真与现场分析表明了该方法简捷、实效、可靠。
除此之外,还就PID 控制,SIMULINK 仿真,ItAE 积分准则,交流矢量电机控制模型等涉及到PID 参数优化等问题进行简要的讨论。
关键词:结晶器;出钢拉速;仿真连接;优化函数;动态干扰中图分类号:Th137.5 文献标识码:AOptimization of the Mould Tapping Velocity System Based on SIMULINKOIAO Guo -lin ,TONG Chao -nan ,SUN Yi -kang(Information Faculty University of Science and Technology ,Beijing 100083,China )ABSTRACT :Control algorithm of PID is suited for the relationship among PID or PI parameters ,and it has been dis-cussed all along.The paper puts forward a new method to optimize the system of mould disturbance based on SIMU-LINK acooding to ItAE integral rule ,using lsgnonlin function provided in optimization toolboX of MATLAB.This opti-mal method has been proved to be simple and practicable by simulation and locale analysis.And besides ,the paper discusses briefly the PID or PI control ,SIMULINK simulation ,ItAE integral rule ,AC motor vector control model and so on.KEYWORDS :Mould ;Tapping velocity ;SIMULINK ;Optimization function ;Dynamic disturbance1 引言尽管现代控制理论给出的控制方法在理论上是多么的完美,由于PID 控制具备设计算法和控制结构简单,性能稳定可靠等特点,至今仍然广泛用于冶金等过程控制中。
应用Simulink模型设计和优化控制系统

D e sign & O pt im iza t ion of C on tro l Sy stem Ba sed on S im ul in k M ode l
ZHOU W en - b ing, ZHOU Yi, CA I Yong - m ing, CH EN H ua - yan
( Guangdong Pha rm aceu tica l U n ive rsity, M ed ical Info rm a tion Enginee ring Institute, Guangzhou Guangdong 510006, Ch ina)
收稿日期 : 2006 - 07 - 12 修回日期 : 2006 - 07 - 18
— 98 —
图 1 随动系统方框图
© 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved.
3 控制系统设计和参数优化
图 2 同时采用了局部并联反馈和非线性相角超前 P ID 校正的 系统方框图
3. 1 设计非线性的控制系统 为了达到良好的控制效果 ,定性分析并设计控制系统如
图 2所示 。首先加入控制工程中广泛使用的并联反馈校正环 节 H ( s) ,其传函形式可对应多种超前网络和滞后网络 ,参数 Ka、T1和 T2数值留待遗传算法搜索决定 。该并联反馈校正的 突出优点是 :在 | G2 ( ωj ) G3 ( ωj ) H ( ωj ) | > > 1时 ,并联校正 H ( s) 能完全替代被包围环节 G2 ( s) G3 ( s) ,从而消除原系统 G2 ( s) G3 ( s) 中不希望有的特性 ,并抑制了原系统参数变化 与各种干扰给系统带来的不利影响 。实际工程中 ,被控系统 的参数经常是变化的 ,如车的重量 ,电机的负载等 ,采用并联 校正 ,对被包围部分元件的要求也可适当降低 。但局部闭环 所包围的惯性环节一般不超过 2 个 , 所以添加 H ( s) 包围 G2 ( s) 和 G3 ( s) 。并联校正详细内容请参阅文献 [ 1 ]。
matlab中simulink使用技巧
matlab中simulink使用技巧参加数学建模已经很多年了,算来其中所学多源于网络上各位前辈的无私奉献。
饮水当思源,承志以后继。
故而添加此分类,用于交流我这些年的心得。
心得分为软件和算法两类,软件可能会包括matlab/simulink,maple,mathematica,spss(被收购成了pasw),ansys,ansoft/maxwell,comsol,pscad,tc,算法可能有GA,NNs。
当然,受到专业研究所限,很多时候无法得心应手,献丑于此,只为提醒自己要做到更好。
恰巧,我在自己学校的bbs上申请了相关版面的版主职位,也希望自己能整理出些基础教学,以备后生晚辈们入门。
暂时的想法是,先说些simulink的相关知识,因为工科学生最常用的就是这个仿真环境,而其他软件又恰好对他保留了接口,可以说这个软件成为了算法的中心。
以后将陆续说些simulink不能完成的任务,并推荐能完成这些任务的工具。
开始吧——simulink可以视作matlab下的工具库,matlab版本不断更新,simulink也不断更新,当前版本为matlab2011b。
首先要明确,simulink的作用为求解常微分方程(组)!且这是他唯一的作用!也就是说偏微分方程在simulink中是无法求解的,需要其他工具或软件作为接口,或者你够牛的,就直接写个有限元的程序。
当然,常微分方程是不够的,为适应数字控制电路等离散系统,simulink可以求解离散的常微分方程,也就是差分方程,略微麻烦,不做重点介绍。
然后来看看simulink求解常微分方程(组)的方法,首先要把方程写成如下形式:y1'=f1(y1,y2,...yn,t)y2'=f2(y1,y2...yn,t)...yn'=fn(y1,y2...yn,t)至于如何写成这种形式,就是降阶了,线性代数里说的很多了,比如y1=y;y2=y1'=y';y3=y2'=y''...需要注意的是,等号右侧不能有导数项,如果等号右边出现了导数项,则说明这个方程需要积分一次。
simulink技巧
simulink技巧Simulink是一种功能强大的模型设计和仿真工具,广泛应用于控制系统、信号处理、通信系统等领域。
在Simulink中,我们可以通过拖拽和连接不同的模块来构建系统模型,并进行仿真和分析。
本文将介绍一些Simulink的技巧,帮助读者更好地使用这个工具。
首先,了解Simulink的基本操作是非常重要的。
在Simulink中,我们可以通过拖拽模块库中的模块来构建系统模型。
可以使用鼠标左键点击模块库中的模块,然后将其拖拽到模型窗口中。
连接模块之间的信号可以使用鼠标左键点击模块的输出端口,然后将其拖拽到另一个模块的输入端口上。
通过这种方式,我们可以构建出复杂的系统模型。
其次,了解Simulink的参数设置是非常重要的。
在Simulink中,每个模块都有一些参数可以设置,以满足系统设计的需求。
可以通过双击模块来打开参数设置窗口,然后根据需要进行参数设置。
例如,对于一个增益模块,可以设置增益的值;对于一个积分模块,可以设置积分的初始值。
通过合理设置参数,可以使系统模型更加准确和稳定。
另外,Simulink还提供了丰富的信号处理和分析工具。
在模型窗口中,可以使用鼠标右键点击信号线,然后选择“显示信号”来查看信号的波形。
可以使用鼠标右键点击模块,然后选择“显示输出”来查看模块的输出信号。
此外,还可以使用鼠标右键点击模块,然后选择“显示参数”来查看模块的参数设置。
通过这些信号处理和分析工具,可以更好地理解系统模型的行为和性能。
此外,Simulink还支持MATLAB脚本的编写和调用。
可以在模型窗口中使用鼠标右键点击空白处,然后选择“插入->MATLAB函数”来插入一个MATLAB函数模块。
在这个模块中,可以编写MATLAB脚本来实现一些复杂的计算和算法。
通过调用MATLAB脚本,可以进一步扩展Simulink的功能和灵活性。
最后,Simulink还支持代码生成和硬件连接。
可以使用Simulink Coder将Simulink模型生成C代码,然后在嵌入式系统中运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2005-01-24第23卷 第3期计 算 机 仿 真2006年3月文章编号:1006-9348(2006)03-0145-04结晶器出钢拉速系统的SIMULINK 优化实现乔国林,童朝南,孙一康(北京科技大学信息学院,北京100083)摘要:PID 或PI 控制器参数之间的匹配关系,一直是PID 控制算法所研究的问题。
该文提出了一种基于SIMULINK ,借助于最小平方优化函数lsgnonlin ,遵循ItAE 积分准则,针对于像结晶器出钢拉速的动态扰动,多变结构系统的PID 或PI 控制器参数优化方法。
仿真与现场分析表明了该方法简捷、实效、可靠。
除此之外,还就PID 控制,SIMULINK 仿真,ItAE 积分准则,交流矢量电机控制模型等涉及到PID 参数优化等问题进行简要的讨论。
关键词:结晶器;出钢拉速;仿真连接;优化函数;动态干扰中图分类号:Th137.5 文献标识码:AOptimization of the Mould Tapping Velocity System Based on SIMULINKOIAO Guo -lin ,TONG Chao -nan ,SUN Yi -kang(Information Faculty University of Science and Technology ,Beijing 100083,China )ABSTRACT :Control algorithm of PID is suited for the relationship among PID or PI parameters ,and it has been dis-cussed all along.The paper puts forward a new method to optimize the system of mould disturbance based on SIMU-LINK acooding to ItAE integral rule ,using lsgnonlin function provided in optimization toolboX of MATLAB.This opti-mal method has been proved to be simple and practicable by simulation and locale analysis.And besides ,the paper discusses briefly the PID or PI control ,SIMULINK simulation ,ItAE integral rule ,AC motor vector control model and so on.KEYWORDS :Mould ;Tapping velocity ;SIMULINK ;Optimization function ;Dynamic disturbance1 引言尽管现代控制理论给出的控制方法在理论上是多么的完美,由于PID 控制具备设计算法和控制结构简单,性能稳定可靠等特点,至今仍然广泛用于冶金等过程控制中。
它基于目标与实际之间的控制误差的过去、现在和变化趋势的加权的控制策略。
系统在采用PID 控制器结构的条件下,如何调整其参数!",!#,!$使其控制品质满足所需的性能,是PID 控制在实际应用中所面临参数整定问题,特别是对于强扰动系统、非线性复杂系统。
从近年已发表众多国内外论文看,目前已经采用遗传算法、蚁群算法、粒子群算法等手段进行控制器参数优化,其控制对象也多是线性系统、滞后系统。
结晶器出钢拉速也是基于PI 控制器的系统,其特点是动态扰动,非线性,并含有强耦合高阶方程。
传统的求解优化设计方法对它难以获得良好的控制效果;智能型优化方法编制程序复杂,不适合优化过程需要多次反复的特点,以及缺乏对系统具有动态扰动、多变结构的适应性。
对于强扰动系统,多变结构的复杂系统的控制器参数优化还需找到一个简捷实用的办法。
1990年Math Works 软件公司为MATLAB 提供了新的控制系统模型图输入与仿真工具,即SIMULINK 。
顾名思义,该名字表明其主要功能:Simu1(仿真)和Link (连接)。
SIMULINK 是可视化动态面向结构的系统仿真环境或系统仿真软件,它比传统的用微分方程和差分方程仿真软件包更能直观地描述、仿真和线性化分析系统。
文中通过结晶器拉速过程和机理,基于SIMULINK ,建起了优化仿真工作平台;用模块组合,借助于最小平方优化函数lsgnonlin ,遵循ItAE 积分准则,使结晶器出钢拉速系统简捷、实效、可靠的优化得以实现。
2 仿真与优化模型的建立如何调整和确定结晶器拉速系统控制参数!",!#,!$使其控制品质满足预定要求,是文中所述的核心。
较为准确的结晶器出钢拉速机理模型,设计合理的SIMULINK 仿真优化模块,及包含ItAE 误差函数优化程序,即三部分的有机结合体现了结晶器出钢拉速,这一动态扰动,多变结构系统的优化思想和策略。
2.1 结晶器出钢拉速实现过程结晶器出钢拉速的实现,是由19台矢量电机驱动辊积—541—压半凝固板坯而产生的摩擦力来使铸坯运动。
通过控制各电机转速,决定结晶器出钢拉速。
情况见图1所示。
图1 结晶器出钢拉速实现示意图2 结晶器出钢拉速扰动系统结构与PID 控制器参数寻优原理示意2.2 PID 参数优化原理与结晶器出钢拉速系统动态结构1)优化原理,见图2。
PID 控制器的输入输出关系以差分方程表达如下:U (k )=k p (e (k )+TT i 2k -1=0e ( )+T d T [e (k )-e (k -1)])=k p e (k )+k i 2k -1=0e ( )T +k d e (k )-e (k -1)T建立k p ,k i ,k d 的相互配合又相互制约的关系,是实现PID 控制算法的关键。
其寻优过程是:测量给定量R (t )和输出y (t )的偏差e (t ),用IIAE 误差积分准则按一定规则修改控制器参数 K=[k 1,k 2,……,k n ],直到寻找至 K *=[k *1,k *2,……,k *n ],使得 =f (k *)取最小。
控制器寻优原理见图2。
2)结晶器出钢拉速系统动态结构,见图2。
交流电机的数学模型是非线性,强耦合高阶方程的复杂系统,其模型的建立主要是以交流电机的电压方程(1)和电力拖动系统运动方程(2)近似得到。
U =Ri +Ldi dt +dL dt i =R +L di dt +dLd G G ・i (1)M -M L =n P d Hdt(2)建立模型[2]见图3。
在19台驱动电机中,选定距离结晶器出口最近的一台电机建立模型。
3 基于SIMULINK 的结晶器出钢拉速系统ItAE优化目标的实现选择一个真正的能够评定系统性能优劣的目标函数,然后去实现系统中各参数正确的最佳组合。
在被控对象和控制器结构形式己确定下,系统的最优控制问题归结为寻找最优控制器参数,使某个指标函数最小。
通过二阶系统在单位阶跃扰动下的响应说明IIAE 准则,即 =jt I e (t )I dt 作为指标函数较好[1]。
结晶器出钢拉速系统主控制器是一个PID 或PI 控制器,另一个副控制器是由PI 控制器构成;结晶器出钢拉速系统控制器的参数优化还是按照先内环,后外环的顺序进行。
基于SIMULINK 与优化函数lsgnonlin 结合,实现结晶器出钢拉速系统控制器参数优化过程如下:3.1电流环仿真模型及PI 控制器参数优化依据 =jt I e (t )I dt =min ,通过它的离散化形式:=(AT )22N i =1i I e (t )I =min (AT 为仿真步距,N 为仿真计算总点数),建立结晶器出钢拉速系统PID 参数优化仿真模型,见图3。
图3 结晶器出钢拉速系统电流环PI 参数优化仿真模型图4 阶跃激励下电流环系统输出响应的仿真曲线依托SIMULINK 的人机交互系统环境,借助最小平方函数lsgnonlin (),按照最小平方指标J =j e 2dI 进行结晶器出钢拉速内环(电流环)PI 参数寻优。
将k p 和k i 设定为未知的—641—待优化参量,遵循目标函数IIAE 准则,利用SIMULINK 优化模块表示出来,并与仿真模块的输出部分进行连接,这样构成了一个仿真与优化有机结合的结晶器出钢拉速内环(电流环)系统模型。
图3为仿真模块与优化目标函数结合的SIM-ULINK 模型。
程序流程见图5所示。
图5 程序流程电流环节采用PI 控制,经运作该程序和SIMULINK 模块,其PI 最佳参数配合为pid =1.5000;0.5100。
仿真结果见图4。
3.2 速度环仿真模型及PID 或PI 控制器参数优化1)建立结晶器出钢拉速系统PID 或PI 参数优化仿真模型,见图6所示。
控制器参数寻优体现在仿真和优化反复交替的过程中,直到输出响应的误差在限定的范围之内,便得出PID 优化结果。
图6 结晶器出钢拉速系统转速环PID 参数优化仿真模型2)速度环采用PID 控制时拉速仿真。
程序大体与电流环仿真程序类似,只是在寻优值设定中增添k d 参数和初始值。
运作该程序和SIMULINK 模块,其PID 最佳参数配合为pid =1.5000;0.5100;0.5100。
仿真结果见图7。
3)速度环采用PI 控制时拉速仿真。
运作相应程序和SIMU-LINK 模块,其PI 最佳参数配合为pid =1.8194;0.2972。
仿真结果图8。
3.3 与现场出钢拉速曲线的对比及分析1)就结晶器出钢拉速系统,PID 控制与PI 控制的比较。
图7和图8仿真曲线表明,PI 控制比PID 控制稳定,响应速度也比较快,而且PI 控制仿真与现场拉速系统(见图9)选定PI 控制策略一致。
2)速度环不论是PID 还是PI 控制,从图7和图8可看出,稳定时结晶器出钢拉速为1.42m /min (0.02367m /S ),符合结晶器平常设定的出钢拉速。
图7 采取PID 控制时结晶器出钢拉速输出响应特性仿真曲线3)仿真与实际的比较。
从整个过程来看,以自制结晶器系统数据采集系统及现场监视器的有效组合,测得某一连铸厂的结晶器出钢拉速启动阶段曲线,现场拉速系统为PI 控制,见图9。
从图9的出钢拉速曲线可看出,其出钢拉速上升过程有两个上升阶段,这是由结晶器复杂工艺和拉速系统强非线性决定的。
只要对比拐点处上升沿与PI 控制的仿真曲线对照,二者就具备可比性。
图8为采用PI 控制器仿真的出钢拉速曲线比图9实际出钢拉速曲线在响应速度等方面好得多,即超调量减小,响应速度加快。