基于傅立叶描述子的字母手势识别
手势识别综述
手 势通 常可 以分 为操作性手势 和交 流性手势 : 如钢琴伴
基 于摄 像头数据采 集方式 的手势识别 系统从 数据采 集 的角度来说要 比数据手套方便 , 摄像头采集到 的手部数据 后
比较麻烦 的是要从背景 中将手分割 出来 , 通常会用肤色分 割 的方法 基于皮肤 的色调将不 同于周 围背景手 的区域分离 出 来, 但是会 受到光线等 因素干扰 。 分离 出手后需要 用合适 的
动作理解警察 的意思 . 含有视觉上的信息 。
按 照手势在表达 的信息中所处 的地位分为 自主性手势和 非 自主. 性手势 :哑语演示时表演者手上的手势动作完全表达
了哑语表演者的思想 . 手势在语义交流中占主导地位 。 属于 自
主 性手势 .演员表演节 目时有时 为了更好的表达情感会用手 势加深语义表达 , 但是手势只是为了更好表达意思 , 到对演 起
奏家在 弹奏钢琴时的手指动作属于操作性手势,通过十个手
指 的不 同组合 ,在键盘上发 出不 同声音形成 乐曲的弹奏 , 只
有操作 的含义, 不含有视觉上信 息。 马路上交警 指挥路况时手 上的动作属于交流性手势 , 通过 司机观察交通警 察手上不同
用还存在卫生等问题 ,ቤተ መጻሕፍቲ ባይዱ此数据手套 目前来说只是应用在试
验阶段 . 真正推广到社会应用还有很多问题要解决 。 例如由海 军某 课题 组开发的某型飞机训练仿真系统采用 了数据手套 , 将人的动作如拉升飞机操纵杆通过数据手套反应 到系统中 , 但是不足之处 是手套存在一 定的延时 ,通常第二个动作都准 备做了 . 第一个动作系统往往还没执行 , 这和真实的飞机操作 存在很大 的差别 ,但是要想 系统及时接受数据手套传感来 的 数据 , 往往对系统的中央处理器要求很高 , 需要大量投入经 费
基于形状特征的字母手势的分类及识别算法
2 w
2
2 B
和类内方差 σ
2
2
2 w
:
图3 为字母L 和字母I 的边界跟踪效果图,可以看出一个 封闭的完整轮廓被提取出来了。
(T)=w1(u1-u) +w2(u2-u)
2
(T)=w1 σ 1 +w2 σ 2 其中,w1和w2分别是类C1和类C2的像素数,u1和u2分别是类C 1和类C2中像素的灰度平均值,u 是所有像素的灰度平均值,
σ
2 1
和 σ 2 分别是类C1和类C2的灰度方差。 使分离度η(T)为最大值的阈值T即为最佳阈值,即
2
(a) 字母L原图
(b) 字母L边界图
η(T)=max[ σ
2 B
(T)/ σ
2 w
(T)]
实验中确定T=200为最佳阈值,图1(c) 为二值化后的效 果图。 1.4 平滑 经过二值化后的图像中可能会有许多孤立的黑点 ( 噪 声),可以通过平滑处理来去掉孤立的噪声、干扰。实验中 采用3×3的辅助矩阵对二值图像进行扫描,根据辅助矩阵中 各像素0、1值的分布,把噪声的像素值从1变为0。设图像中 点P(x,y) 的像素值为f(x,y) ,它的八邻域像素值分别为 f(x+1, y)、f(x+1,x-1)、f(x,y-1)、f(x-1,y-1) 、f(x-1,y)、f(x-1,y+1) 、 f (x,y+1)、f(x+1,y+1)。采用的平滑算法如下: 令 θ 为点P(x,y) 及其八邻域像素值的平均值,即
2
1 预处理
当把观察到的手势图像转换成可用计算机处理的数字图 像时,图像的画质将会在不同程度上出现歧变,本文对输入 图像进行了灰度变换、锐化、二值化和平滑等预处理。 1.1 线性灰度变换 图像由于成像时曝光不足或过度,都会产生对比度不 足、细节分辨不清等现象,通过将图像灰度进行线性扩展可 解决这种问题。设原始图像在 (x,y) 处的灰度为f ,改变后的 图像为g,则可把图像在 (x,y)处的灰度f映射为g,公式为
手势识别技术综述
手势识别技术综述作者单位:河北工业大学计算机科学与软件学院内容摘要:手势识别是属于计算机科学与语言学的一个将人类手势通过数学算法针对人们所要表达的意思进行分析、判断并整合的交互技术。
一般来说,手势识别技术并非针对单纯的手势,还可以对其他肢体动作进行识别,比如头部、胳臂等。
但是这其中手势占大多数。
本文通过对手势识别的发展过程、使用工具、目的与市场等进行综述,梳理出手势识别发展的思路,让读者对手势识别有一个总体上的认识,同时也可以让读者在此基础上进行合理想象,对手势识别的未来有一个大体印象。
Abstract:Gesture recognition is an interactive technology using mathematical arithmetic to the analysis,judge and assembly meaning that people want to convey which belongs to computer science and Linguistics.In general, gesture recognition technology is not for simple gestures expressed by hands ,it can also aim to other body movement recognition, such as the head, arm and so on. But the gesture accounted for most of the analysis. In this paper, by describing the development process, tools used , objective and market of gesture recognition , we can sort out the ideas of the development of gesture recognition, and let readers have an overall understanding of gesture recognition. At the same time, it can let the reader imagine that on hand gesture recognition based on reason ,and have a general impression of its future.1.定义说到手势识别,首先要对手势识别中的手势有一个清晰的认知。
结合CSS与傅里叶描述予的手势特征提取

、 .8 b13
・
计
算
机
工
程
21 0 2年 3月
M ac r h 201 2
No. 6
Com p t rEn i e i u e g ne rng
人工 智 能及 识别 技 术 ・
文章 编号:1o. 8 o2 每_ 7—0 文献标识码: oo 2( 1) _ 18 3 _ 2 o 0 A
faue E p r na rsl ei eefcie eso i n w faueo tt etr c g io yi i c r c t 9 .% , o ae t e tr. x ei tleut vryt f t n s fhs e tr ns i g s er o nt nb s 曲 or tae 83 c mprdwi me s fh e v t e ac u e i th e r h
ta ii n l pp o c s r d to a a r a he .
I yw r s io ae ;tt etr aue CS hp ec po ; o r r ec po;o afaue go a a r Kc o d ]vs nb sd saig s ef tr; Ssaed sr trF u e sr trlcletr; lb let e i c u e i i d i f u DoI 1 .9 9jsn10 —4 82 1 . . 8 : 03 6 /i . 03 2 . 20 0 .s 0 0 65
越来越 广泛 的关注 。 目前 已被应 用到人机交互、智能家 电、 哑语识 别及机器人 的示范 学习等各 种领 域中 。根据外围设备 的不同 ,将手势识别分为基于数据手套 的手 势识 别和基于视
基于OpenCV_的手势识别算法研究与应用
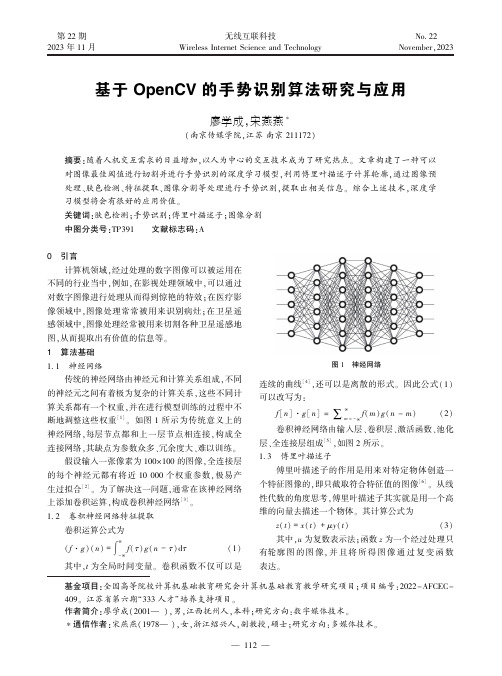
第22期2023年11月无线互联科技Wireless Internet Science and TechnologyNo.22November,2023基金项目:全国高等院校计算机基础教育研究会计算机基础教育教学研究项目;项目编号:2022-AFCEC -409㊂江苏省第六期 333人才 培养支持项目㊂作者简介:廖学成(2001 ),男,江西抚州人,本科;研究方向:数字媒体技术㊂∗通信作者:宋燕燕(1978 ),女,浙江绍兴人,副教授,硕士;研究方向:多媒体技术㊂基于OpenCV 的手势识别算法研究与应用廖学成,宋燕燕∗(南京传媒学院,江苏南京211172)摘要:随着人机交互需求的日益增加,以人为中心的交互技术成为了研究热点㊂文章构建了一种可以对图像最佳阈值进行切割并进行手势识别的深度学习模型,利用傅里叶描述子计算轮廓,通过图像预处理㊁肤色检测㊁特征提取㊁图像分割等处理进行手势识别,提取出相关信息㊂综合上述技术,深度学习模型将会有很好的应用价值㊂关键词:肤色检测;手势识别;傅里叶描述子;图像分割中图分类号:TP391㊀㊀文献标志码:A 0㊀引言㊀㊀计算机领域,经过处理的数字图像可以被运用在不同的行业当中,例如,在影视处理领域中,可以通过对数字图像进行处理从而得到惊艳的特效;在医疗影像领域中,图像处理常常被用来识别病灶;在卫星遥感领域中,图像处理经常被用来切割各种卫星遥感地图,从而提取出有价值的信息等㊂1㊀算法基础1.1㊀神经网络㊀㊀传统的神经网络由神经元和计算关系组成,不同的神经元之间有着极为复杂的计算关系,这些不同计算关系都有一个权重,并在进行模型训练的过程中不断地调整这些权重[1]㊂如图1所示为传统意义上的神经网络,每层节点都和上一层节点相连接,构成全连接网络,其缺点为参数众多㊁冗余度大㊁难以训练㊂假设输入一张像素为100ˑ100的图像,全连接层的每个神经元都有将近10000个权重参数,极易产生过拟合[2]㊂为了解决这一问题,通常在该神经网络上添加卷积运算,构成卷积神经网络[3]㊂1.2㊀卷积神经网络特征提取㊀㊀卷积运算公式为(f ㊃g )(n )=ʏɕ-ɕf (τ)g (n -τ)d τ(1)其中,t 为全局时间变量㊂卷积函数不仅可以是图1㊀神经网络连续的曲线[4],还可以是离散的形式㊂因此公式(1)可以改写为:f [n ]㊃g [n ]=ðɕm =-ɕf (m )g (n -m )(2)卷积神经网络由输入层㊁卷积层㊁激活函数㊁池化层㊁全连接层组成[5],如图2所示㊂1.3㊀傅里叶描述子㊀㊀傅里叶描述子的作用是用来对特定物体创造一个特征图像的,即只截取符合特征值的图像[6]㊂从线性代数的角度思考,傅里叶描述子其实就是用一个高维的向量去描述一个物体㊂其计算公式为z (t )=x (t )+μy (t )(3)其中,u 为复数表示法;函数z 为一个经过处理只有轮廓图的图像,并且将所得图像通过复变函数表达㊂图2㊀卷积神经网络1.4㊀定义损失函数㊀㊀一般来讲,在实验的过程中,理想的轮廓提取和实际的轮廓提取总会产生一定的差距㊂为了很好地解决这些差距,通常会定义一个损失函数来度量模型预测的轮廓与实际轮廓之间的差距[7]㊂本文通过计算点到轮廓的距离来定义损失函数㊂假设在读取的手势图像中有2点P1(x1,y1)和P2 (x2,y2),为了计算这2点的欧几里得空间中的直线距离,其计算公式如下:d=((x2-x1)2+(y2-y1)2)(4)其中,d为欧式距离;(x1,y1)和(x2,y2)分别为2个点的坐标㊂公式(4)中的平方根运算表示计算2个点在坐标轴上的距离差的平方和的平方根㊂公式(4)可以推广到更高维度的欧几里得空间中,其中每个点可以有更多的坐标值㊂在三维空间中,公式会进一步扩展为:d=(x2-x1)2+(y2-y1)2+(z2-z1)2(5) 2 手势识别的流程㊀㊀首先获取实时手势图像,然后进行图像预处理,包括图像增强㊁图像锐化等提高图像清晰度[8]㊂接着计算手势特征值提取轮廓,采用YCrCb颜色空间中的Cr分量并结合阈值分割算法进行二值化,输出切割图像㊂最终确定当前手势,获取手势信息㊂基于OpenCV的手势识别流程如图3所示㊂2.1㊀预处理㊀㊀从摄像头或视频中获取手部图像帧,将图像转换为灰度图像进而调整对比度㊂转换的实现过程是使用OpenCV中的 cv2.cvtColor() 函数,并将转换方式设置为cv2.COLOR_BGR2GRAY() 函数㊂其具体实现代码如下:image=cv2.imread('image.jpg')gray_image=cv2.cvtColor(image,cv2.COLOR_图3㊀手势识别流程BGR2GRAY)上述代码中, cv2.cvtColor() 函数将彩色图像转换为灰度图像㊂第一个参数是输入图像,第二个参数是转换的方式,使用cv2.COLOR_BGR2GRAY指定转换为灰度图像㊂转换后的灰度图像将存储在新的变量 gray_image 中㊂这里需要注意的是,灰度图像只有一个颜色通道,而彩色图像有3个颜色通道㊂因此使用灰度图像存储可以大大节省内存和计算资源㊂2.2㊀计算特征值㊀㊀特征图像的创建过程如下:(1)创建一个空白图像,将描述子的每个元素作为像素值填充到图像中对应的位置㊂(2)调整图像的大小和尺度,从而适应特定的应用场景㊂(3)使用诸如调色板㊁平滑滤波器㊁边缘检测等图像处理技术,从而突出显示特征㊂(4)将特征图像与原始曲线图像进行叠加显示㊂如下代码为创建特征图像的核心算法:def create_feature_image(descriptors):㊀feature_image=np.zeros((100,100),dtype= np.uint8)㊀for i,descriptor in enumerate(descriptors):㊀㊀x=int(descriptor[0]∗50)++50㊀㊀y=int(descriptor[1]∗50)++50㊀㊀feature_image[y,x]=255feature_image=cv2.applyColorMap(feature_image, cv2.COLORMAP_JET)㊀return feature_image descriptors=np.array([[1.2,0.8],[-0.5,0.2], [0.9,-0.7]])feature_image=create_feature_image构建好描述子之后,可以进行各种手势特征提取,这些特征包括手指数量㊁手指的位置和弯曲度㊁手的方向㊁手掌的位置等㊂2.3㊀肤色检测㊀㊀肤色检测流程如图4所示㊂图4㊀肤色预测流程首先需要进行合适的颜色空间转换[9]㊂常见的颜色空间转换是将图像从RGB空间转换到YUV㊁HSV或Lab㊂将图像从RGB空间转换到YUV空间的实现代码为:yuv_image=cv2.cvtColor(image,cv2. COLOR_BGR2YUV),将图像从RGB空间转换到HSV 空间的实现代码为:hsv_image=cv2.cvtColor(image, cv2.COLOR_BGR2HSV),将图像从RGB空间转换到Lab空间的实现代码为:lab_image=cv2.cvtColor (image,cv2.COLOR_BGR2Lab)㊂ cv2.cvtColor() 函数用于执行颜色空间转换㊂第一个参数是输入图像,第二个参数是转换方式,可以通过使用预定义的常量(如cv2.COLOR_BGR2YUV㊁cv2.COLOR_ BGR2HSV㊁cv2.COLOR_BGR2Lab)来指定所需的转换㊂不过,使用YCrCb颜色空间可以最大化地对RGB图像进行显示,其从RGB空间到YCrCb空间的转换公式如下:YCrCbéëêêêêùûúúúú=0.2990.5870.114-0.1690.3310.5500.500-0.4190.081éëêêêêùûúúúú㊃RGBéëêêêêùûúúúú+128128éëêêêêùûúúúú(6)对于手部轮廓的提取,使用的是简单的自适应阈值方法,在OpenCV中的表示代码为:ret,threshold= cv2.threshold(gray_image,thresh,maxval,threshold_ type),其中 gray_image 代表输入的灰度图像; thresh 代表阈值,用于将像素分为目标和背景; maxval 代表像素大于阈值时,所设置的像素值; threshold_type 代表阈值分割的类型,例如 cv2. THRESH_BINARY 表示二值化阈值分割㊂3㊀实验结果㊀㊀对于上述算法在手势轮廓提取的应用实验结果如图5所示㊂图5㊀手势轮廓进行肤色检测和分割处理后的实验结果如图6所示㊂图6㊀原始图像及分割后的图像基于提取的手势特征进行机器学习模型训练,在文中使用的模型为KNN㊂训练完成后识别的结果如图7所示㊂4㊀结语㊀㊀随着人机交互技术的日益发展,手势识别算法愈图7㊀手势识别来愈成熟㊂本文主要是对手势的识别先导思想如神经网络㊁卷积神经网络等进行分析,并通过图像预处理㊁特征值提取㊁肤色预测等步骤实现人体手势识别㊂后续对于本课题还有很大的改进空间;例如是否可以从二维的角度进而升级从三维的角度进行处理,从而把本课题实现的二维模型建成三维模型,这样不仅可以获得更多的特征值,还可以极大地提高识别的成功率㊂参考文献[1]张珂,冯晓晗,郭玉荣,等.图像分类的深度卷积神经网络模型综述[J].中国图象图形学报,2021㊀㊀㊀㊀(10):2305-2325.[2]马岽奡,唐娉,赵理君,等.深度学习图像数据增广方法研究综述[J].中国图象图形学报,2021(3): 487-502.[3]李文逵,韩俊英.基于一种轻量级卷积神经网络的植物叶片图像识别研究[J].软件工程,2022(2): 10-13.[4]史延新.一种基于Retinex理论的图像增强算法[J].电子科技,2007(12):32-35.[5]陈兵,蒋行国.卷积神经网络用于人脸特征提取[J].现代电子技术,2022(18):182-186.[6]刘瑞明,孙帅成,黄佳炜,等.基于图像纹理分析的布匹瑕疵检测综述[J].江苏海洋大学学报(自然科学版),2020(2):86-93.[7]双丰,黄兴文,李勇,等.基于深度学习的大规模点云语义分割方法综述[J].测绘科学,2023(2): 195-209.[8]罗国强,李家华,左文涛,等.基于计算机视觉技术的手势识别步骤与方法研究[J].无线互联科技, 2020(3):148-149.[9]顾明,郑林涛,尤政.基于颜色空间转换的交通图像增强算法[J].仪器仪表学报,2015(8):1901-1907.(编辑㊀沈㊀强)Research and application of gesture recognition algorithm based on OpenCVLiao Xuecheng Song Yanyan∗Communication University of Nanjing Nanjing211172 ChinaAbstract With the increasing demand for human-computer interaction human-centered interaction technology has become a research hotspot.This paper constructs a deep learning model that can cut the best threshold of the image and perform Gesture ing Fourier descriptors to calculate the contour Gesture recognition is carried out through image preprocessing skin color detection feature extraction image segmentation and other processing and relevant information is extracted.Based on the above technologies the deep learning model implemented in this article will have great application value.Key words skin color detection gesture recognition fourier descriptors image segmentation。
基于HMM SVM的中国手语识别研究

二分类 、 算法复杂等缺点 。 鉴于 以上 分类方 法 的缺 点 ,借用 几何 学 的方法 提 出 了最 小包 围球 的 S M 方 法 ( B S M) V ME — V 。 通过 S M算法将给定的手势训练样本集 s经图像分割 、 V 二值化等步骤得到一组特征向量 ; 再用基函数
对 这 些 向量进 行空 问映射 。为 了能快速 地 得到样 本 集 的最 小包 围球 , 以采用 近似 的 办法 。其 主要 思想 是 可
表 1 实验 结果
实验 结果 中 ,V越 小 ,算法 收敛 时间越 短 , 由于包 含 在包 围球 中 的 向量 太少 ,对算 法 的准 确度 会 有 但
一
定 的影 响 , V大于 0 02以上 时 , 法训 练 时间增 加 明显 ,同时算 法 准确度 也有所 增加 。 当 .0 算
6 结 语
封闭性 , 用八邻域搜索算法提取得到的二值图的轮廓。八邻域搜索算法记录一个一维序列 , 序列 中存放边
界像素的位置。背景像素为零值 ,目标像素为非零值。从开始坐标 出发 , 在当前坐标的八邻域内搜索非零
像素 , 将搜到的第一个坐标记为序列的下一个坐标 , 并将 当前坐标存入序列中 ; 直到当前坐标和开始坐标 相等 , 完成 搜 索 。得 到 的一 维序列 即为二 值 图的轮廓 。 则
手形识 别技 术包 括 : 板 匹配 、 征提 取和 神经 网络 等相关方 法 , 节 介绍前 两种 方法 , 模 特 本 神经 网 的方法 络 将 在 2 3节 中介 绍 。手势是 用来 强调 或表 达一种 意念 、 . 感情 或态 度一个 手 的动作 。所 以 , 开始 的意 图到最 从 终 的动作 , 手势 由一个 时 间段 内所 做 的一 系列手 形组成 。所 以在 手势识 别 的过程 中 , 一个基 础 的工作 就是进 行 手 势分饵 , 即把 手 势按时 间顺 序分解 成若 干手 势识 别 。
基于视觉的傅立叶描述子手势识别方法
个 坐标 轴 的 旋转 变换 表 示 成 Q )其 中d 示 旋转 轴 , 表示 ( , 表 B
关节 , 表示 手指 。 由于所定 义 的手 势或 手势语 言 , 应具有 准 ^ y 都 确 的含 义 , 们 对 其运 动 类 型及 所涉 及 的关 节 . 我 在手 模 型 中加 入如 下 约束 : 约束1 MP。I DI关 节 以及 手 指 “ 轴 ” 终 处 于 某 一 平 PP, P 中 始 面 。除 大拇 指的MP 关节 可 能有 弯 曲、 展或侧 向运动 外 , I和 伸 PP
软 件 导 刊
一
2 o 年 o8
DP I 只能在 同一 平面 上作弯 曲、 伸展 运动 。 约束 2 I 和肿 之间 弯 曲角 度具 有线 性关 系 ,其相 关性 表 DP
示为 :
叩 23 ;(/ )
样 的明确 的物 理意义 。
傅 立 叶 描 述子 ( o r rD sr tr) 物 体 形 状 边 界 曲 线 F u e ec pos 是 i i
摘
要: 在对 手结 构和 关节 运动作 了深入 分析 的基础 上, 立 了对 其施 加 约束 的手 模 型 。根 据 所定 义 的约 束及运 动 建
类 型, 立 了适 合 于手 势合成 的手 数据 结构 ,并 采 用傅 立 叶描 述子进 行手 势特 征提 取进 而进 行 手势识 别。 得 了较 建 取
图1 示 为手 模 型 的关 节 表 示 及 它 们 可 能具 有 的运 动类 所
作 者 简 介 : 少 丽 (9 8 ) 女 , 东 威 海 人 , 南 大 学 信 息 科 学 与 工 程 学 院 助 教 , 究 方 向 为 图 像 处 理 。 张 17 一 , 山 济 研
《2024年基于RGB-D的双手手势识别方法研究及系统设计》范文

《基于RGB-D的双手手势识别方法研究及系统设计》篇一一、引言随着人工智能技术的不断发展,手势识别技术作为人机交互的重要手段之一,越来越受到人们的关注。
基于RGB-D(红绿蓝深度)技术的双手手势识别方法,因其能够提供更丰富的空间信息,具有更高的识别精度和鲁棒性,成为当前研究的热点。
本文旨在研究基于RGB-D的双手手势识别方法,并设计相应的系统,以实现高效、准确的手势识别。
二、研究背景及意义手势识别作为一种自然、直观的人机交互方式,在多个领域具有广泛的应用前景。
传统的手势识别方法主要依赖于单一模态的数据,如RGB图像或深度信息,难以在复杂环境下实现准确的识别。
而基于RGB-D的技术,通过融合彩色图像和深度信息,可以提供更丰富的空间信息,提高手势识别的准确性和鲁棒性。
因此,研究基于RGB-D的双手手势识别方法具有重要的理论价值和实际应用意义。
三、相关技术及方法1. RGB-D技术原理:RGB-D技术通过融合彩色图像和深度信息,实现对物体表面三维形状的感知。
其中,彩色图像提供物体的颜色信息,深度信息则用于描述物体的空间位置和结构。
2. 手势特征提取:通过对手部区域的图像进行特征提取,包括颜色特征、形状特征、纹理特征等,以用于后续的手势识别。
3. 机器学习算法:采用机器学习算法对手势特征进行训练和分类,如支持向量机(SVM)、随机森林、神经网络等。
4. 双手手势识别:通过对手部区域的特征进行匹配和分类,实现双手手势的识别。
四、双手手势识别方法研究1. 数据预处理:对采集的RGB-D数据进行预处理,包括去噪、二值化、形态学处理等,以提高数据的质量和可靠性。
2. 手部区域检测:通过颜色信息和深度信息,检测出手部区域的位置和范围。
3. 特征提取与表示:对手部区域进行特征提取,包括颜色特征、形状特征、纹理特征等,并将这些特征进行表示和描述。
4. 机器学习训练:采用机器学习算法对手势特征进行训练和分类,建立手势识别的模型。
基于计算机视觉技术的手势识别步骤与方法研究
基于计算机视觉技术的手势识别步骤与方法研究手势识别是指通过计算机视觉技术,从一系列手势中识别出特定的手势并进行相应的反馈或操作。
手势识别已经广泛地应用到了许多领域,如人机交互、视频游戏、智能监控等。
手势识别的技术方案有多种,但总的来说,手势识别主要包含以下步骤:1.图像采集手势识别首先需要采集手势的图像数据。
手势图像可以通过摄像头、深度相机、激光雷达等多种设备进行采集,并将采集到的图像输入到计算机中进行后续的处理。
2.预处理采集到的手势图像中包含了许多干扰信息,如光照、背景噪声等,需要对图像进行预处理。
常用的处理方法包括降噪、背景削除、手势边缘检测等。
3.特征提取特征提取是手势识别的关键步骤,它能够从手势图像中提取出有用的识别特征。
一般来说,手势的特征可以包括手势外形、手指姿态、手部运动轨迹等。
常用的特征提取方法包括形状描述子、局部特征描述子、基于深度信息的特征等。
4.分类识别经过特征提取后,手势的识别特征已经被抽象出来,接下来需要将其与训练好的分类器进行匹配,从而实现手势的分类辨别。
常用的分类器包括支持向量机、k-近邻、神经网络等。
1. 基于颜色的手势识别基于颜色的手势识别是指通过提取手部肤色的特征来识别手势。
该方法主要用于对简单的手势进行识别,如上、下、左、右、点击等。
基于运动轨迹的手势识别是通过跟踪手部的运动轨迹来对手势进行识别。
该方法对于对手部运动轨迹变化比较明显的手势,如画圆形、描绘形状等能够较好地进行识别。
基于深度信息的手势识别是利用深度相机等设备获取手势三维坐标信息,通过将手势投影到二维平面进行识别。
该方法能够对手势的立体位置变换进行识别。
手势识别技术在未来将具有广阔的应用前景,随着计算机视觉技术的进步和手势识别算法的不断优化,手势识别技术将会成为人机交互、智能家居、无人驾驶等领域的重要组成部分。
matlab基于傅里叶描绘子的特征提取

matlab基于傅里叶描绘子的特征提取特征提取是图像处理和计算机视觉中的重要步骤,它能够从图像中抽取出有用的信息以用于进一步的分析和处理。
傅里叶描绘子(Fourier Descriptors)是一种常用的特征提取方法,它基于傅里叶变换的原理,能够将图像中的形状特征转化为频域特征。
本文将介绍傅里叶描绘子的基本原理、特点以及在图像处理中的应用。
傅里叶描绘子的基本原理是将图像边界上的离散点坐标序列视为一个复数函数,通过对该函数进行傅里叶变换,得到一组复数系数,这组系数可以看作是图像形状的“指纹”。
傅里叶描绘子具有旋转、平移和尺度不变性的特点,能够描述图像的整体形状,同时对噪声和失真具有一定的鲁棒性。
傅里叶描绘子的计算过程如下:1. 提取图像的边界点,在边界上等间隔地采样一些点,得到坐标序列。
2. 将坐标序列转化为复数函数形式。
3. 对复数函数进行离散傅里叶变换,得到一组复数系数。
4. 可选地对系数进行降维处理,保留较高能量的系数。
5. 可选地对系数进行归一化,使其具有尺度不变性。
6. 使用保留的系数作为特征进行后续处理,如分类、匹配等。
傅里叶描绘子在图像处理和计算机视觉中有着广泛的应用。
以下是几个常见的应用领域:1. 物体识别和匹配:通过比较图像的傅里叶描绘子特征,可以实现物体的识别和匹配。
例如,可以利用傅里叶描绘子来实现字母和数字的识别,以及人脸和指纹的匹配等。
2. 形状分析:傅里叶描绘子能够对图像的形状进行全局描述,因此可以应用于形状分析。
例如,可以用傅里叶描绘子来比较不同植物的叶片形状,从而实现植物分类和识别。
3. 缺陷检测:通过比较正常和异常样本的傅里叶描绘子特征,可以实现缺陷的检测。
例如,在半导体芯片制造中,可以利用傅里叶描绘子来检测芯片表面的裂纹和缺陷。
4. 图像压缩:傅里叶描绘子能够对图像进行压缩,减小数据量的同时保持较好的图像质量。
例如,在无损压缩中,可以利用傅里叶描绘子将图像从时域压缩到频域,从而实现高效的压缩和传输。
基于模式识别的手势识别技术研究进展

基于模式识别的手势识别技术研究进展手势识别技术是一种通过识别人的手势动作来实现交互的技术。
它可以将人体的手势动作解析为计算机可以理解的数字信号,从而实现与计算机的无接触交互。
随着模式识别技术的不断发展,基于模式识别的手势识别技术也得到了越来越广泛的应用。
本文将对基于模式识别的手势识别技术的研究进展进行探讨。
一、手势识别技术的基本原理基于模式识别的手势识别技术主要包括三个方面的内容:手势获取、特征提取和分类识别。
手势获取是通过各种传感器和设备获取人体手势动作的数据信息,如摄像头、传感器、深度相机等。
特征提取是将获取到的手势数据进行处理和分析,提取其中的关键特征。
分类识别是根据提取到的特征,通过机器学习和模式识别算法对手势进行分类和识别。
二、手势识别技术的应用领域基于模式识别的手势识别技术在许多方面都有广泛的应用。
首先,在人机交互领域,手势识别技术可以利用人的手势动作来实现计算机的控制和操作,比如在智能手机、平板电脑等移动设备上,通过手势识别可以实现手势操作的快捷控制。
其次,在虚拟现实和增强现实领域,手势识别技术可以实现虚拟环境中的手势交互和虚拟物体的操作。
此外,在医疗康复、体感游戏和智能家居等领域也有着广泛的应用。
三、基于模式识别的手势识别技术的研究方法在基于模式识别的手势识别技术的研究中,有许多不同的方法和算法被提出。
其中,常用的方法包括机器学习方法、神经网络方法和图像处理方法。
机器学习方法主要包括支持向量机、最近邻算法和决策树等,通过训练样本对手势动作进行分类和识别。
神经网络方法可以通过构建神经网络模型,对手势数据进行学习和训练。
图像处理方法则主要应用于手势数据的预处理和提取特征等步骤。
四、基于模式识别的手势识别技术的发展趋势随着科技的不断进步,基于模式识别的手势识别技术也在不断发展。
未来,手势识别技术在智能家居、智能汽车和智能机器人等领域将得到更加广泛的应用。
同时,随着深度学习技术的兴起,深度学习算法也将在手势识别技术中起到越来越重要的作用。
基于图像处理的手部姿态识别与手势分析研究
基于图像处理的手部姿态识别与手势分析研究从文字中我们可以了解到,任务名称是“基于图像处理的手部姿态识别与手势分析研究”。
在这篇文章中,我们将对基于图像处理的手部姿态识别和手势分析进行研究和探讨。
手部姿态识别与手势分析是计算机视觉领域中一个重要且具有挑战性的研究方向。
它可以应用于许多领域,如人机交互、虚拟现实、智能监控等。
手势是人与人之间的一种非语言交流方式,通过手势识别和分析,计算机可以理解人类的意图并作出相应的反应。
为了实现这个目标,图像处理是不可或缺的一环。
图像处理技术可以从图像中提取有用的信息,并帮助计算机理解手部姿态和手势。
这包括图像的预处理、手部特征提取、手部姿态估计和手势识别等。
首先,图像预处理是手部姿态识别和手势分析的第一步。
在这一步中,需要对输入的图像进行去噪、图像增强和图像分割等处理,以获得更加清晰明确的手部图像。
这可以通过滤波算法、对比度增强和阈值分割等技术来实现。
接下来,需要从图像中提取手部特征。
手部特征是识别和分析手势的关键。
常见的手部特征包括手指的位置、手指的角度、手掌的形状等。
可以使用特征提取算法,如边缘检测算法、形态学运算和轮廓提取等,来提取这些特征。
然后,通过手部姿态估计算法,可以推算出手部的具体姿态。
手部姿态可以包括手掌的朝向、手指的弯曲程度、手指的位置等。
常用的姿态估计算法有基于模型的方法和基于机器学习的方法。
基于模型的方法通过建立手部的三维模型,然后通过优化算法将模型与实际图像进行匹配,以估计手部的姿态。
而基于机器学习的方法则通过训练一定数量的手部姿态样本,使用分类器或回归器来学习手部姿态的映射关系。
最后,手势识别是基于图像处理的手部姿态识别与手势分析的最终目标。
手势识别可以根据手部的姿态和动作,将手势与相应的意图进行匹配。
这可以通过分类器、神经网络或深度学习方法来实现。
其中,深度学习方法在手势识别方面取得了显著的进展,通过卷积神经网络和循环神经网络等网络结构,可以从大规模的手势数据集中学习并识别出各种手势。
基于Kinect和变形雅可比-傅里叶矩的手势识别

基于Kinect和变形雅可比-傅里叶矩的手势识别刘亚瑞;杨文璐【摘要】为了使人机交互变得更加自然,提出利用Kinect体感器获取手势深度图像;利用变形雅可比-傅里叶矩对手势图像进行特征提取;利用最小欧氏距离分类器进行建模、分类,实现手势识别.用Kinect体感器获取手部深度数据流,深度数据结合阈值分割法,可以有效地实现手势的分割.变形雅可比-傅里叶矩是一种不变矩,不变矩具有灰度、平移、旋转和尺度不变性,适合用于多畸变不变图像的特征提取.实验对5种手势进行了测试,平均识别率为95.2%,实验结果表明:该方法具有较高的识别率.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)007【总页数】4页(P48-50,54)【关键词】Kinect;变形雅可比-傅里叶矩;手势识别;自然人机交互【作者】刘亚瑞;杨文璐【作者单位】上海海事大学信息工程学院,上海201306;上海海事大学信息工程学院,上海201306【正文语种】中文【中图分类】TP391在智能计算机的快速发展下,传统的人机交互方式已经不能满足人类的需求,人类从而提出了自然交互界面(natural interactive interface)。
自然人机交互主要通过手势、语音和姿势来实现。
其中,通过视觉通道让计算机感知人的意图和行为是自然人机交互的重要追求目标,而手势是一种最直观的表达方式,所以,在自然人机交互的研究中手势识别技术显得非常重要。
手势识别技术主要包括基于数据手套的手势识别技术和基于视觉的手势识别技术,其中,基于数据手套的手势识别结构复杂、成本昂贵,极大地限制了自然人机交互的进行[1,2]。
基于视觉的手势识别技术[3,4]需要进行手势分割,在复杂背景下手势分割易受周围环境(如背景、光照等)的影响。
在手势识别方面的研究,已经有了一些研究成果,但是他们的研究都存在一些不足。
Liu N等人做出的手势识别系统可以识别出26个字母[5,6],缺点是系统复杂;Apivan Tuntakurn等人用Kinect体感器自带的骨骼流建立了手势识别医学软件[7],但是该系统具有局限性,要求人的身体必须全部在Kinect体感器视野范围内;Li Y在特定手势识别中采用角点检测和凸性检测来识别手势,缺点是识别率易受周围环境的影响,无法识别复杂背景下的手势[8~11]。
结合CSS与傅里叶描述子的手势特征提取

结合CSS与傅里叶描述子的手势特征提取李丹娇;彭进业;冯晓毅;王珺【摘要】目前常用的基于视觉的静态手势特征提取方法只从单一方面进行描述,缺乏全局信息和局部信息的有效结合.为此,提出一种结合CSS形状描述子与傅里叶描述子的手势特征提取方法.将CSS形状描述子与傅里叶描述子相结合,以此作为一种融合手势局部特征和全局特征的新的静态手势特征.实验结果表明,与传统方法相比,该方法的正确率更高,达到98.3%.%Aiming at the problem that the common static gesture features which are used in vision based recognition often only focus on gestures in a single aspect, and lack of effective gesture description for combination of wholeness and local part, this paper proposes an approach which extracts Fourier descriptor as a kind of global feature, and CSS shape descriptor as a kind of local feature, and then combines them into the final feature. Experimental results verify the effectiveness of this new feature on static gesture recognition by its high correct rate 98.3%, compared with traditional approaches.【期刊名称】《计算机工程》【年(卷),期】2012(038)006【总页数】3页(P178-180)【关键词】基于视觉;静态手势特征;CSS形状描述子;傅里叶描述子;局部特征;全局特征【作者】李丹娇;彭进业;冯晓毅;王珺【作者单位】西北工业大学电子信息学院,西安710129;西北工业大学电子信息学院,西安710129;西北工业大学电子信息学院,西安710129;西北工业大学电子信息学院,西安710129【正文语种】中文【中图分类】TP391.411 概述手势作为人的一种自然表达方式,在日常生活中被广泛使用。
基于傅里叶描述子的手势识别方法

基于傅里叶描述子的手势识别方法
邢益良;雷华军
【期刊名称】《工业控制计算机》
【年(卷),期】2024(37)5
【摘要】手势识别是计算机视觉人机交互应用领域关键技术,手势轮廓携带有手势重要特征,准确捕获手势轮廓对提高手势识别具有重要意义。
针对手掌轮廓特征提取困难和手势识别率低问题,提出了基于傅里叶描述子的手势识别方法,按照候选窗口最大轮廓傅里叶描述子匹配度和置信度分割出手掌区域;跟踪手掌轮廓计算其傅里叶描述子得到手势轮廓特征值;将16个手势轮廓特征值作为BP人工神经网络的输入,利用BP人工神经网络识别手势。
实验表明,该方法能有效捕获手势轮廓和识别19种手势,具有识别率高、性能优良和鲁棒性好等优点。
【总页数】4页(P77-79)
【作者】邢益良;雷华军
【作者单位】海南软件职业技术学院
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于Hu不变矩及傅里叶描述子的手势分类算法
2.基于傅里叶描述子的手势轨迹模板匹配方法
3.基于矩和傅里叶描述子的云雨粒子图像识别方法
4.基于OpenCV 的数字手势识别方法
5.一种基于菲涅耳区和深度学习的WiFi手势识别方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于傅立叶变换的掌纹识别方法(英文)
基于傅立叶变换的掌纹识别方法(英文)李文新;张大鹏;许卓群【期刊名称】《软件学报》【年(卷),期】2002(013)005【摘要】Palmprint recognition aims at finding out the palmprint template from the database, which is from the same palm as a given palmprint input. Feature extraction plays an important role in the recognition process. In this paper, we propose a new feature extraction method by converting a spatial domain palmprint image into a frequency domain image using Fourier Transform (FT) and representing palmprint features in the frequency domain. The extracted features are used as indexes to the palmprint templates in the database and the searching for the best match is leaded by these features in a layered fashion. The experimental result shows that the proposed FT based feature extraction method is effective in terms of accuracy and efficiency on our palmprint database.%掌纹识别是指由计算机自动识别哪些掌纹图像来自同一只手掌,哪些来自不同的手掌.在掌纹识别中,特征提取算法的优劣至关重要.提出了一种基于傅立叶变换的掌纹特征提取方法.该方法的基本思想是先将掌纹图像应用傅立叶变换转换到频域,然后在频域中进行特征提取和描述.提取出来的特征备用来索引掌纹数据库,以便当一个新的掌纹图像被输入时,可以很快确定该手掌是否已经在掌纹库中注册.该方法可以用来做基于人体生物特征的身份识别,在安全领域有广泛的应用前景.实验验证了该方法的有效性.【总页数】8页(P879-886)【作者】李文新;张大鹏;许卓群【作者单位】北京大学,计算机科学技术系,北京,100871;香港理工大学,电子计算系,香港;香港理工大学,电子计算系,香港;北京大学,计算机科学技术系,北京,100871【正文语种】中文【中图分类】TP391【相关文献】1.基于小波子带融合的单训练样本掌纹识别方法 [J], 张延强;李哲谦;王博涵2.基于小波子带融合的单训练样本掌纹识别方法 [J], 张延强;李哲谦;王博涵;3.基于两段稀疏表示方法的3D掌纹识别方法 [J], 高淑芝;王鹏飞;李少阳4.基于TensorFlow的掌纹识别方法研究 [J], 王全;田宇5.基于深度学习的非接触掌纹识别方法 [J], 郑仕伟;韩俊刚因版权原因,仅展示原文概要,查看原文内容请购买。
基于LSSVM的静态手势识别

基于LSSVM的静态手势识别
段洪伟;陈一民;林锋
【期刊名称】《计算机工程与设计》
【年(卷),期】2004(025)012
【摘要】支持向量机(Support Vector Machine, 简称SVM),是基于统计学习理论的一种新的模式识别方法,较好地解决了小样本学习问题.通过使非线性空间变换为线性空间,降低了算法的复杂性.LSSVM(Least Squares Support Vector Machine)由于使用线性等式代替了标准的SVM算法中的线性不等式,进一步降低了运算量.利用傅立叶描述子获取静态手势特征向量,通过LSSVM大尺度算法求解方程组来得到LSSVM分类器,进行静态手势识别,取得了较高的识别率.说明如何把静态手势识别结果应用到机器人远程控制中,提高人机交互的友好性.
【总页数】3页(P2352-2353,2368)
【作者】段洪伟;陈一民;林锋
【作者单位】上海大学,计算机工程学院,上海,200072;上海大学,计算机工程学院,上海,200072;上海大学,计算机工程学院,上海,200072
【正文语种】中文
【中图分类】TP242.6+2
【相关文献】
1.基于几何特征的桌面静态手势识别 [J], 张辉;邓继周;周经纬;朱成顺;刘李明;张胜文
2.基于多特征加权融合的静态手势识别 [J], 陈影柔;田秋红;杨慧敏;梁庆龙;包嘉欣
3.基于MATLAB的静态手势识别系统设计 [J], 赵海君;张玉婷;曳永芳
4.基于深度学习的静态手势识别算法设计 [J], 栾迪;周广证
5.基于静态手势识别的视力检测系统设计 [J], 李昌锋;郭生挺;陈文婷
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中: k=0 , 1 , …, n - 1 , x 。 ( I ) + y ’ ( I ) = x ( I + a ) + i y ( I + a )
3 . 1 模板 匹配 的原理
模板匹配是数字图像处理的重要组成部分之一. 模板 匹
配就是计算一个 固定的 目标模式和一个未 知图像块 的相 异
2 图像 的预 处 理
y ( p ) = ∑; ( p ) = ∑h .
i= 1 ;= l
2 . 3 二 值 化
图像 的二值化是将灰度图像转换 为只有两个灰度值即
黑 白图像的过程 . 最简单 的图像二值化方法可通过设定阈值 来完成 , 即当该点 的像 素值大于设定 的阈值时 , 以“ 0 ” 标志, 否则 以“ 1 ” 标志. 所以二值化 的关键在于阈值 T的选择. 在实验 中, 由于采用 的为单一 的黑色背景 , 与手 的灰度 相差较大. 因此 , 所采用的闯值设定方法为 : 先拍摄一张背景
第2 9卷 第 4期( 上)
2 0 1 3年 4月
赤 峰 学 院 学 报 (自 然 科 学 版 )
J o u r n a l o f C h i f e n g U n i v e r s i t y( N a t u r a l S c i e n c e E d i t i o n )
背景单一 , 摄入 的图像 噪声较少 , 因此采用局部平 均法 进行
图像 的平 滑. 局部 平均法 的主要操作 是模板运算 . 模板 运算
是 图像处理中经常使用的一种运算方式 ,常用 的算法 是将 图像 中某个像素的灰度值和它周围相邻 的八个像 素的灰度 值相加 , 然后再求取平均值 , 以此来作 为新 图中该像 素的灰
R =c C o l o r oo r d 2 5 6 G= c C o l o r |2 5 6 mo d 2 5 6
B = cCo l o r |2 56 |25 6
图2 . 1 原始图像
图2 . 2 灰度图像
图2 . 3 二值 图像
—
ቤተ መጻሕፍቲ ባይዱ
1 6一
3 字母 手 势 图像 的识 别
1 引言
c C o l o r 为 图像 的 R G B值 , R, G, B分别 为提取 出的 红 、 绿、 蓝三个颜色分量 . 然后再根据下式进行灰度转换 :
H=0. 3 R+0. 5 9* G+ 0. 1 1 B
随着人机交互技术 的发展 ,手语识别逐渐成为人们研 究 的热点. 手语识别可以分为基于视觉的识 别系统和基 于数 据手套 的识别 系统Ⅲ , 基 于视觉 的手语识别方法交互方便 自
归一化的傅立叶描述子定义为 :
d ( 1 【 ) =
k : 1 , 2 , …, n 一 1 l 1 . 1 I 表示取模 .
2 . 2 平 滑
然, 更能反映机器模拟人类视觉的功能 , 是 目前手语识别 的
研究重点.
图像的平滑主要是减少 图像噪声. 图像平滑的方法主要
有两种 : 一种是全局处理 , 另一种是局部处理[ 4 1 . 本 实 验 由 于
手势识别 的方法主要有三种 : 模 板匹配法 、 隐马尔可夫 模 型法以及神 经网络法[ 2 1 , 而模板 匹配法主要用 于静态手 势 的识别 . 模板匹配法首先要进行手势训练以建立模板库, 然
V o 1 . 2 9No . 4 Ap r . 2 0 1 3
基 于傅立 叶描述子 的字母 手势识别
黄 国范, 李 英
( 南阳师 范 学院
摘
软件 学 院 ,河 南 南 阳 4 7 3 0 6 1 )
要: 本 文提 出了一种字母手势识别方法 , 首先对字母手势 图像进行预 处理 , 然后 用模板 匹配的方法进行识 别, 并采用
傅里 叶描 述子作为特征 向量进行 字母手势 图像的描述 , 以消除视 觉敏 感问题 . 实验结果表 明, 我们的方法较好地 实现 了字母
手 势 图像 的 识 别 .
关键词 :字母手势; 模 板 匹配; 傅立叶描述子 ; 特征提取
中图 分 类 号 : T P 3 9 1 文 献标 识 码 : A 文章编号 : 1 6 7 3 — 2 6 0 X ( 2 0 1 3 ) 0 4 — 0 0 1 6 — 0 2
度值. 该算法可表示 为:
M M
后提取 出合适 的特征向量 与模板进行匹配( 3 1 . 但是 , 由于每个
人 的手指粗细 大小不 同 ,而且 同一个手势平移 以及偏转 之 后的意义并不影 响手势本身所传达 的意思 ,所 以手 势识 别
中提取 的特征 向量必须要保证其视觉不变 , 即消除平移 、 旋
( 白) 之 间的灰度值来 描述图像. 灰度划分 越细 , 越能 准确 的
再现图像. 实验 中通过数码相机采集 的 J P E G图像 , 是2 4 位
真彩色 图像 . 这种格式 的图像数据量非 常大 , 直接识 别会 大 大影响速度. 因此 , 我们首先 要进行灰度 化处理. 具体做法是 将J P E G图像的 R G B三个颜色分量分别提取出来 :
字母手势 图像 的预处理 主要包括灰度变换 、 平滑 、 二 值 化等 , 为图像 的识别作好准备工作. 2 . 1 灰度化 灰度 图像不 是简单 的非黑 即 白 , 而是用 0 ( 黑) 到2 5 5
图片 , 然 后取背景 图像 的平 均灰度值 , 再乘 以一个 系数 , 便
可得到二值化的阈值 T : T = B * 2 . 5 其 中, B为背景图像 的平均灰度值 . 字母手势 c的灰度及二值化处理效果 图如下所示 :