最大风能转换模糊控制系统仿真研究
模糊控制在离网风力发电最大风能捕获中的应用
步长,可 以加快搜 索速度 ,但震 荡随之增 大,降低 了 搜索效率. 2 ) 减小搜素步长,可以减缓震 荡,但响应速
度随之降低. 为解决上述 问题 , 综合 模糊控制动态 响应 快、适
发 电系统 中, 采用最人 风能捕获策 略( MP P T ) ,一方面
可 以提 高变 流器利用效率,另一方面 能够进 ~步降低 风 电成本. 此, 研 究高效 、 经济的 MP P T控制策略对 小风 电的推广有着积极作用.
关键词:离刚风力发 电; MP P T控制;模糊 P I D; P MS G
Fuz z y Lo g i c Ba s e d M PPT Co n t r o l l e r f o r a S t a n d— Al o ne W i n d En e r g y Co nv e r s i on S y s t e m
d e ve l o pe d .A 5 k W s t a n d a l o n e W ECS wa s a n a l y z e d i n t he S i mu l i n k. Th e r e s ul t s s h o w ha t t t h e p r o po s e d a l g o r i t h m ha s b e t t e r d y n a mi c p e r f o r l T l a n c e a n d c a p t u r e mo r e po we r t ha n t h e c o n v e n t i o n a l HCS u n d e r c o n s t a n t wi n d a n d v a r i a b l e wi nd . Ke y wo r ds : s t a n d — a l o n e wi n d e ne r g y c o n v e r s i o n s y s t e m; M PP T c o n t r o l ; f uz z y PI D; P MS G
风力发电系统中的建模与控制研究

风力发电系统中的建模与控制研究在当今的清洁能源发展领域中,风力发电系统的应用越来越广泛。
然而,风力发电系统的性能受到很多因素的影响,如风速、方向、风机的角度等,因此需要对其进行建模和控制。
本文将对风力发电系统的建模和控制进行详细介绍。
一、风力发电系统的建模风力发电系统的建模是指对其进行数学模型的建立,以便于对其进行分析和优化。
通常,风力发电系统可以分为两类:水平轴式和垂直轴式,两者的建模方法略有不同。
1.水平轴式风力发电机的建模水平轴式风力发电机的建模通常涉及以下几个方面的内容:(1) 风速建模:风速是风力发电机发电的重要参数,其建模一般采用韦伯分布模型或雷诺分布模型等。
(2) 风机建模:风机在发电过程中的旋转角度、转速等参数的建模,可以采用PID控制器或模糊控制器进行建模。
(3) 发电机建模:发电机的建模包括稳定性、转矩特性等方面的内容,可以采用dq坐标转换进行建模。
2.垂直轴式风力发电机的建模垂直轴式风力发电机的建模通常涉及以下几个方面的内容:(1) 风车叶片建模:风车叶片的建模通常包括气动特性等方面的内容,可以采用贝塞尔曲线、叶片离散化等方法进行建模。
(2) 风机建模:风机的建模同水平轴式风力发电机相似,通常采用PID控制器或模糊控制器进行建模。
(3) 发电机建模:同水平轴式风力发电机相类似,发电机的建模也可以采用dq坐标转换进行建模。
二、风力发电系统的控制风力发电系统的控制是指在对其进行建模的基础上,对风力发电系统进行控制,以优化其性能、提高其效率。
1.PID控制器PID控制器是风力发电系统控制中最常用的控制器之一,其可调性强、稳定性好,在控制精度和速度上表现良好。
2.模糊控制器模糊控制器则是一种更为高级的控制器,其利用模糊数学理论,将模糊变量通过模糊推理引擎转换为控制信号,从而实现对风力发电系统的控制。
3.滑模控制器滑模控制器则是一种更为高级的控制方法,其可实现对风力发电系统的精准跟踪和控制,是当前控制水平较高的控制方法之一。
风力发电机组模糊控制器的设计与仿真
第l 2期
胡世忠等. 风力 发电机组模糊 控制器的设计与仿真
・ 7・ 7
所捕获 的风能可转变为机械输 出功率 P :
P = 5 A ) c( , () 1
变速 变桨风力发 电机组根据不 同的风况可分为
三个不 同的运行 阶段 : 第一 阶段是起动阶段 , 发电机 转速从静止上升 到切 入速 度 ; 第二 阶段是 风力发 电 机组切入 电网后运行 在额定 风速 下 的区域 , 它又 分 为变速运行 区域 (C 恒定 区) 和恒 速运 行 区域 ; 第 三 阶段是 风力 发 电机组 运行 在额 定风 速 以上 的 区 域, 也称为恒功率 区域 。 根据变速变桨风力发电机组在不同区域 的运行 情况 , 基本的控制策 略为 : 在额 定风 速 以下 时 , 主要 是调节发电机反力矩使 转速跟 随风速 变化 , 以获得
等。
模糊控制是 以模糊集 合论 、 糊语 言变量及 模 模
糊逻辑推理为基础的一种重要 而有效 的智能控制方 法 。模糊控制器由模糊化接 口、 知识库 、 推理机和模 糊判决接 口四个 基本单元组成 。模糊控制不需要 对象的精确数学模 型 , 具有较好 的动态性能 , 特别适
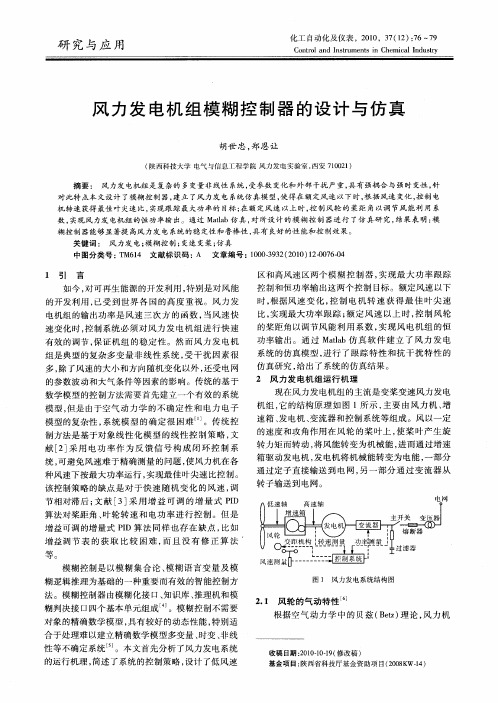
风
图 1 风 力 发 电系 统 结 构 图
多 , 了风 速 的大 小 和方 向随 机 变 化 以 外 , 受 电 网 除 还
的参数波动和大气条件等 因素的影响。传统 的基 于
数学模型的控制方法需要首先建立一个有效的系统 模型 , 但是 由于空气 动力学 的不确定 性和 电力 电子 模型的复杂性 , 系统模 型 的确 定很 困难 。传 统控 制方法是基 于对象 线性化模 型 的线 性控制 策略 , 文 献 [ ] 用 电功率 作 为反 馈 信 号构 成 闭环 控 制 系 2采 统, 可避免风速难于精确测量的问题 , 使风力机在各 种风速下按最大功率运行 , 实现最佳 叶尖速 比控制 。
模糊专家控制系统的最大风能追踪
关键词 : 风电机组 ; 模糊控制 ; 专家控制 系统 ; 电磁阻转矩 ; 家控制器 ; 专 专家知识库 ; 隶属度 ; 风能追踪
中图 分 类 号 : M3 5 T 1 文献 标 识 码 i A 文 章 编 号 :0 4 7 1 (0 2 0 — 0 9 0 10 — 0 8 2 1 )9 0 6 — 4
…
.
皇棚…22 _ … 0 1
… … …… … …… … … … … ……
模 糊 专 家控 制 系统 的最 大 风 能追 踪
刘 妹 , 一 姚兴佳 王晓 东 单光坤 井艳 军 , , ,
( . 阳 工 业 大 学 , 宁 沈 阳 10 2 ;. 阳 化 工 大 学 , 宁沈 阳 10 4 ) 1沈 辽 1 03 2 沈 辽 1 12
to ft a ue c nr la d s c aitc to ss p ro fta to a o r lme h d,whih c n b t rfnih c nr lts i n o he v g o to n pe i ls onr li u e i ro r di n lc nto t o i c a et s o to a k e i i n o run ta d ta k ma i u wi we fe ie y n wfct l . v K e o ds: n o rg n r tr f z y c n rl e pe tc n rls se ; lcr m a nei e it n e tr e; x e sc n— yw r wi d p we e e a os;u z o to ; x r o to y tm ee to g tc r ssa c o qu e p r o t
摘
要: 采用模糊专 家技 术处理不确定性控制系 统问题 , 利用模 糊专 家控制 系统 , 提高 风电机组 的效 率 , 现 实
基于滑模模糊方法的变速风电系统的最大风能捕捉控制器设计

第 2期
谭
Байду номын сангаас
川,等
基于滑模模糊方法 的变速风电系统 的最大风能捕捉控制器设计
6 9
根据 贝兹 ( t)理论 ,风轮 从空气 中获取 的 Bez
能量 为 :
∞ ) =
则 (1 式可变 换 为 1)
Y ,c) - u(  ̄ - =b j -
P 辱7  ̄p ,) f c C(c = v vo
参数 变化不 敏感 、抗扰 动能 力强等 优 点,在 电力系 统 、交流传 动 、电力 电子技术 等领域 得 到 了广泛 的
应用 。 本文采用积分滑模模糊 自 适应控制策略。 此控制策略基于带积分补偿的滑模变结构控制方 案 ,在被控 对象 无法 精确 建立 数学模 型 的情况 下 ,
项 和切换 项进 行模糊 逼近 ,系统控 制平 稳 , 能有 且
0 引 言
效 降低抖 振现 象 。 将此 控制 策略应 用于变 速风 力发 电系统 中 , 仿真 结 果表 明,在强扰 动和系 统模 型未
风 能是 一种取之 不尽 、用之 不竭 的新 能源 ,同 精 确获 知 的情 况下 , 控制 策略 可 以实现 风 能的最 此 时也是 一种 不可控 的过程 性能源 。 能转换 过程 实 大 捕捉 ,且具有 较 强的鲁棒 性 ,可 以达 到满意 的控 风
=
等
( 2 )
这里 ,
=
应 。 说 明在任 何风速 下,只 要使得 风轮 的叶尖速 这
) p 兀 等
( 风 速变 化 时 , 要通 过发 电机励 磁 系统来 调节 风轮 4 ) 只
转速 ,使 叶尖 速度 与风 速之 比保 持不 变 ,就可 获得
比 ,就 可维 持风 力机在 一下运 行 。因此 ,当 =
基于Simulink的风电机组模糊变桨距控制仿真研究

基于Simulink的风电机组模糊变桨距控制仿真研究陈功贵;黄山外;刘俊超;郭飞【摘要】针对风力发电系统复杂非线性的特点,传统PID控制很难满足控制系统高精度的要求.在传统PID控制的基础上,运用模糊理论建立了完整的风电机组变桨距模型,以实现对控制系统的实时控制.仿真结果表明,模糊控制能使系统获得较好的动态特性.利用Simulink进行仿真实验,不仅能使学生有效理解变桨距控制系统理论知识,还可以提高学生的实验操作能力,从而掌握控制系统的静态和动态过程,这种理论与实践相结合的方法能够有效地提高教学质量.【期刊名称】《实验室研究与探索》【年(卷),期】2016(035)004【总页数】5页(P90-94)【关键词】风力发电机;变桨距控制;仿真;模糊控制【作者】陈功贵;黄山外;刘俊超;郭飞【作者单位】重庆邮电大学自动化学院,复杂系统分析与控制研究中心,重庆400065;重庆邮电大学自动化学院,复杂系统分析与控制研究中心,重庆 400065;重庆邮电大学自动化学院,复杂系统分析与控制研究中心,重庆 400065;重庆邮电大学自动化学院,复杂系统分析与控制研究中心,重庆 400065【正文语种】中文【中图分类】TM614;G434风能是一种分布广泛的绿色可再生能源,风力发电机组能够将风能转换成供人们使用的电能。
风力发电系统是一个多变量、非线性的控制系统,这给风电机组的变桨距控制带来了很大的困扰[1]。
因此,对风力发电机组PID参数进行优化来保证变桨距控制系统的稳定性,进而得到安全、优质的电能是是风力发电机组研究的关键问题[2]。
而风电机组变桨距控制系统的性能与变桨距控制器的控制规律及参数设置密切相关,因此,找到合适的控制器参数成为了变桨距控制的另一个难题。
维持电力系统安全稳定运行是非常重要的,对于这样一个复杂非线性的控制系统,传统的PID控制[3-4]很难达到较好的控制效果,而采用模糊PID控制[5-7],通过建立模糊规则对PID控制参数进行实时在线的调整,这样能够使系统获得良好的动态性能进而保证电力系统的稳定性[8-10]。
基于模糊控制的风力发电机组控制系统研究
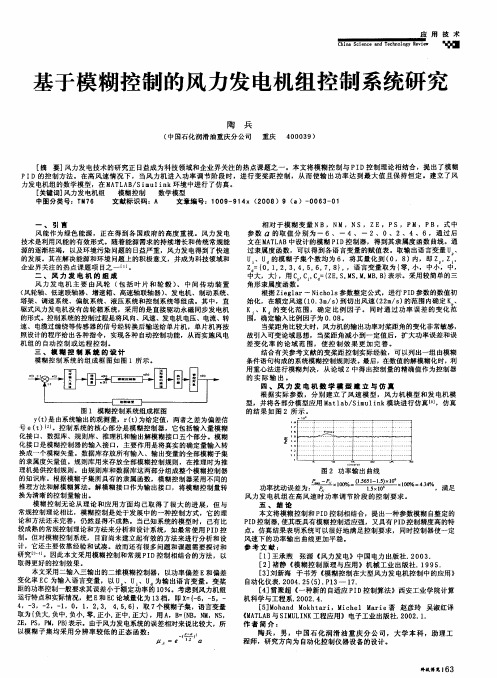
相对 于模糊 变量 N B,N M,N s,zE,P S,P M,P B,式中 参数 口 的取值 分别 为 一 6、一 4、 一 2、0、2、4、6,通 过 后 文在 M T A A L B中设计的模糊 PI D控制器 ,得 到其 隶属度函数 曲线。通 过隶属度 函数 ,可以得到各语 言变 量的赋值表 。取输出语言变量 u 、 U 、U 的模 糊子集个 数均为 6,将 其量化到 ( 0,8 )内,即 Z Z , , Z =f l 2 3 4 5 6 7 8 ,,语 言变量取为 { 小 ,中小,中, 0, , , , , , , , ) 零, 中大 ,大} ,用 C, C=( E S M , , B B 表示。采用 较简单 的三 C , Z , , S M M , } 角形 隶属度 函数 。 根据 Z e l r— N c o S iga i h l 参数整定公式 ,进行 P D参数的数值初 I 始化 ,在额定风速 ( 0 3 / ) 1 . = S 到切出风速 ( 2 / ) 2 m S 的范 围内确定 K 、 ¨ K 、K 的变化 范围 ,确定 比例 因子 。 同时通 过功 率误差 的变 化范 围,确定输入 比例 因子为 0 0 . 8。 当桨距角 比较大时,风力机 的输出功率对桨距角的变化非常敏感 , 故引入可变论域思想 ,当桨距角 减小到一定值后,扩大功率误差和误 差变 化率 的 论域 范 围,使 控制 效 果更 加完 善 。 结合有关参考文献 的变桨距 控制实际经验 ,可 以列出一组 由模糊 条件语句构成 的系统模糊控 制规则表 。最后 ,在数值 的解模糊化时,利 用重心法进 行模糊判决,从论域 Z中得 出控制量 的精确值 作为控 制器 的 实 际输 出 。 四 、 风 力 发 电 机 数 学 模 型 建 立 与 仿 真 根据 实际参数 ,分别建 立 了风速模 型 ,风 力机模 型和发 电机模 型 ,并将各部分模型应用 ^ t a / i u n l 1 b S m l k模块进行仿真 【 ,仿真 a i 5 ] 的结果如 图 2所 示 。
基于模糊PID的风电系统转速控制仿真研究

f Taj e a oa r fr o t l h o & A pi t n o pi t yt r n nU i r to eh o g)Taj 0 34 1 ini K yLb rty o nr er . n o C oT y p l a osnC m l a dS s m 0i j nv s y f cnly , inn30 8 , ci i ce e ai e i T o i C ia2Hee S iah agPw r upyC m ayS iah ag 50 1Hee Poic, h a hn ;. bi h izun o e p l o pn , h i un 0 6 , b i rv e C i ) j S jz 0 n n
Vn. No5 1 27 .
Ma 01 v2 1
中 图分 类 号 :M 1 T 64
文 献标 志 码 : A
基 于 模 糊 P I D的风 电系 统 转 速 控 制仿 真 研 究
赵辉1李斌1朱利 强2刘俊杰1 , , ,
f. 市复杂控制 理论 与应 用重点 实验 室f 1天津 天津理工 大 学1天津 30 8; , 0 34
-| 一 纛
j0 l魏乳 E r 镣 乌
第2 卷 第 5 7 期
2 1年 5 01 月 文章 编 号 :6 4 3 1 (0 )50 6 — 3 17 — 84 2 1 0 — 0 3 0 1
电 网 与清 洁 能 源
Po rSy tm nd Cl a we se a e n Ene g ry
风速 的随机性 , 要求 系统 的响应快 , 调小 。本 超 设 计 的模糊 自适 应PD I 控制 器 的输入 量为 叶尖速 比 的误 差E 9 A = 一 和误 差变化 率△ E,输 出量 为发 电机
风力发电机偏航系统风向模糊控制仿真(1)
技术创新《微计算机信息》(测控自动化)2010年第26卷第1-1期360元/年邮局订阅号:82-946《现场总线技术应用200例》仿真技术风力发电机偏航系统风向模糊控制仿真Simulation of Wind Direction Fuzzy Control of the Yaw system of Wind Turbine(1.西南大学;2.湘电风能有限公司)李治琴1祝诗平1何智洋2LI Zhi-qin ZHU Shi-ping HE Zhi-yang摘要:针对风向变化的随机性和不确定性等特点,在LabVIEW 平台上,利用其模糊控制工具包对风力发电机偏航系统的风向模糊控制进行了仿真。
进行了模糊控制规则的制定,I/O 测试,模糊控制仿真程序设计及仿真前面板设计。
并进行了仿真分析,结果表明,利用基于LabVIEW 的模糊控制工具包设计风力发电机偏航系统风向模糊控制能得到合理的调向路径,很好的实现风轮对风,可以满足风力发电机偏航系统主动迎风的工作要求。
关键词:风力发电机;偏航系统;模糊控制;LabVIEW;仿真中图分类号:TM614文献标识码:AAbstract:Based on the characteristics of the wind randomness and uncertainty,the wind direction fuzzy control of the yaw system is simulated,the fuzzy control rules is established,I/O test,the fuzzy control simulation programm and the simulation front panel are designed with the Fuzzy Control for G Toolkit on the platform LabVIEW.Simulation results show that it can get a reasonable path to the tune,well make the wind wheel on the wind with the Fuzzy Control for G Toolkit ,and it could meet the requirements of the yaw system ′s initiative in the wind.Key words:Wind Turbine;Yaw System;Fuzzy Control;LabVIEW;Simulation文章编号:1008-0570(2010)01-1-0144-021引言风力发电产业在中国的发展日趋成熟,统计数据表明,目前风力发电机机组有两个问题最为突出:桨叶根部的疲劳破坏和偏航特性。
风力发电机偏航控制系统的研究
风力发电机偏航控制系统的研究一、本文概述随着全球对可再生能源需求的持续增长,风力发电作为一种清洁、可再生的能源形式,已在全球范围内得到了广泛的关注和应用。
风力发电机(Wind Turbine)作为风力发电系统的核心设备,其运行效率和稳定性对于整个系统的性能至关重要。
偏航控制系统作为风力发电机的重要组成部分,对于确保风电机组的安全运行和最大化能量捕获具有关键作用。
本文旨在深入研究风力发电机偏航控制系统的原理、设计及其在实际应用中的性能表现。
文章首先介绍了风力发电机的基本工作原理和偏航控制系统的基本构成,为后续的研究提供了理论基础。
接着,文章详细分析了偏航控制系统的关键技术和控制策略,包括传感器技术、执行机构、控制算法等,并探讨了这些技术和策略对风力发电机性能的影响。
在此基础上,文章通过实验和仿真研究,评估了不同偏航控制策略在实际应用中的效果,为优化风力发电机偏航控制系统提供了有益的参考。
文章还讨论了风力发电机偏航控制系统面临的挑战和未来的发展趋势,为相关领域的研究者和工程师提供了有价值的参考信息。
通过本文的研究,期望能够为风力发电机偏航控制系统的设计、优化和应用提供有益的指导,推动风力发电技术的发展,为实现全球能源转型和可持续发展做出贡献。
二、风力发电机概述风力发电机是一种利用风能转换为电能的装置,其工作原理基于风的动力学特性和电磁感应原理。
风力发电机通常由风轮(也称为风叶或转子)、发电机、塔筒和基础等部分组成。
风轮由多个风叶组成,当风吹过风叶时,风叶受到风力作用而旋转,进而带动发电机转动,发电机中的磁场与导体产生相对运动,根据电磁感应原理,导体中会产生感应电动势,从而产生电能。
风力发电机具有清洁、可再生、无污染等优点,是当前全球范围内大力推广的可再生能源发电方式之一。
风力发电机的装机容量和单机容量不断增大,技术也在不断进步,从最初的定桨距失速型发展到变桨距调节型,再到目前最先进的主动偏航控制系统,风力发电机的性能和稳定性得到了显著提升。
风能利用系数模糊控制策略的研究
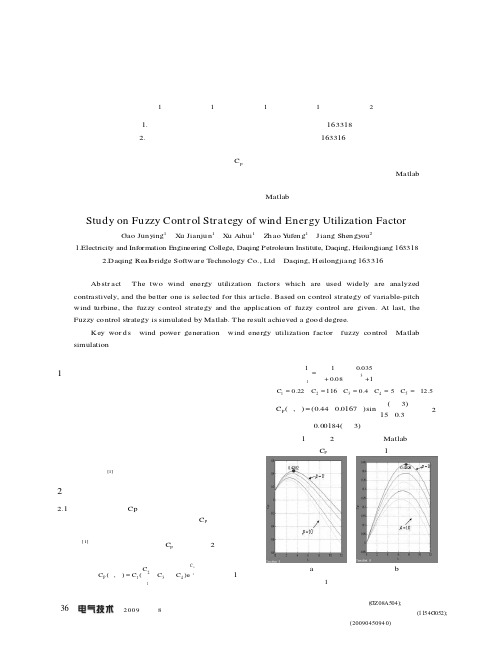
新能源专题年第期36风能利用系数模糊控制策略的研究高俊莹1徐建军1许爱华1赵玉峰1蒋生友2(1.大庆石油学院电气信息工程学院,黑龙江大庆163318;2.大庆紫金桥软件技术有限公司,黑龙江大庆163316)摘要对普遍采用的两个风能利用系数C p 进行了对比分析,择优选取用于文中。
基于变桨距风力发电机控制策略的基础上,给出了模糊控制策略和模糊控制的具体应用。
最后利用Matlab 对控制模糊策略进行了仿真研究,取得了很好的控制效果。
关键词:风力发电;风能利用系数;模糊控制;Matlab 仿真Study on Fuzzy Control Strategy of wind Energy Utilization FactorGao Jun ying 1X u Jianju n 1X u A ihui 1Zh ao Y ufen g 1J iang Shen gyou 2(1.Electricity and Information Engineering College,Daqing Petroleum Institute,Daqing,Heilongjiang 163318;2.Daqing Realb ridge Software Technology Co.,Ltd ,Daqing,Heilongjiang 163316)Ab str actThe two wind energy utilization factors which are used widely are analyzedcontrastively,and the better one is selected for this article.Based on control strategy of variable-pitch wind tu rbine,the fuzzy control strategy and the application of fuzzy control are given.At last,the Fuzzy co ntrol strategy is simulated by Matlab.The result achieved a goo d degree.Key wor d s :wind power generation ;wind energy utilization factor ;fuzzy co ntrol ;Matlab simulation1引言目前风力发电是发展最快的绿色能源之一。
风力发电系统控制技术的研究
配网 自动化 ・
・
低压 电器 (0 8 o 7 20 N 1 )
通 用 低 压 电器 篇
风 力发 电系统 控 制技 术 的研 究
章安 志 , 程 大章
( 同济大 学 社 区信 息化 与智 能建 筑研 究 中心 ,上 海 20 7 ) 0 0 0
模糊控制在风力发电机组偏航控制系统中的应用
Absr t tac :Be a s ft er n o e sa d i tb lt ft ewi c u e o h a d mn s n nsa ii O h nd.i h so t i d t e lW o to fe ti y t a b ane h O c n rlefc n
r s l h wst a u z o to y tm sa e t rc st e wi d d r cin mo e q ik y a d e a t e uts o h t z y c nr ls se i bl o ta k h n ie to r u c l n x cl f y,i c n t a
g th g rsa ii n eibi t e ihe tb l y a d r l l y,a d i i e s r d mo e se dl . t a i n t s n u e r ta i y
K e r s:wi d t r i e;y w o to y t m ;wi d d r c i n ta k;f z y c n r l y wo d n u b n a c nr ls se n ie to r c u z o to
1 风 力 发 电 机 组 控 制 系统 概 述
风 力 发 电 机 组 是 实 现 将 风 能 转 换 成 电能 的 一 种
二氧化碳 排放量 , 也是 推 广风 能 在全 球 应用 的重 这 要动力 .风力 发 电作 为 一 种 清洁 的绿 色能 源 , 具 更 有潜 在的开发应用 价值 . 偏航 控制 系统对 于提高风力 发 电机组 的稳定性 和风能 的利用效 率有着决 定性 的作用 .由于 风能 是
模糊逻辑的双馈发电机最大风能捕获控制
风力发电系统中的最大功率跟踪与优化控制

风力发电系统中的最大功率跟踪与优化控制随着环境保护意识的增强和对可再生能源的需求不断增加,风力发电作为一种清洁、可持续的能源形式受到了广泛关注。
风力发电系统的核心是风力发电机组,其效率和稳定性对整个发电系统的运行起着至关重要的作用。
在风力发电系统中,最大功率跟踪与优化控制是提高风能利用效率的关键技术之一。
最大功率跟踪是指风力发电机组通过调整叶片角度、发电机转速等参数,以确保风力发电机组从风能中获取到尽可能多的功率。
最大功率点通常发生在风速的特定范围内,此时发电机的输出功率最大。
通过最大功率跟踪技术,可以提高风力发电系统的能量转换效率,从而提高风能的利用率。
为了实现最大功率跟踪,需要采用合适的控制策略。
常用的控制策略包括传统的PID控制、模糊控制、神经网络控制等。
PID控制是一种经典的控制方法,通过调节维持调节器中的比例、积分和微分参数,可以实现风力发电机组的最大功率跟踪。
模糊控制是一种基于经验的控制方法,通过将模糊数学理论应用于控制系统中,可以实现对风能的最大利用。
神经网络控制则是一种基于人工神经网络理论的控制方法,通过神经网络的学习和适应能力,可以实现对风力发电机组的最大功率跟踪。
除了最大功率跟踪,优化控制也是提高风力发电系统效能的重要技术。
优化控制通过分析和优化风力发电系统中的各个环节参数,使得整个系统的发电效率最大化。
优化控制可以从多个角度入手,如控制风力发电机组的叶片角度、转速、控制整个风力发电系统中的发电机组数量和布局等。
通过合理的优化控制,可以提高风力发电系统的整体效率,降低能源的损失。
在风力发电系统中,最大功率跟踪与优化控制有助于提高风能的利用率,并降低发电成本。
最大功率跟踪能够确保风能的尽可能高效利用,优化控制则可以从整体上提高风力发电系统的效率。
这将不仅对环境保护产生积极作用,也对电力供应系统的可靠性和可持续性产生重要影响。
然而,要实现风力发电系统中的最大功率跟踪与优化控制,并不是一件容易的事情。
风力发电机组最佳功率追踪自适应模糊PID控制
风力发电机组最佳功率追踪自适应模糊PID控制方明星;李月;吴立军;程靖;杜友武【摘要】针对变速恒频风力发电系统,以额定风速以下风能的最大利用率为目标,设计了基于自适应模糊PID控制的风能最佳利用追踪控制器.该控制器对叶尖速比进行控制,运行时根据实际输出的叶尖速比与其最优值间的误差及误差变化率在线实时调整PID参数,实现自整定,达到风能利用系数最佳的功率追踪目标.通过仿真对几种控制方法进行对比分析,结果表明,自适应模糊PID控制能够将风能利用系数和叶尖速比均控制在最优值附近,系统的稳态性能和动态性能都较好,控制效果优于PID 控制和模糊控制.【期刊名称】《安徽师范大学学报(自然科学版)》【年(卷),期】2015(038)002【总页数】6页(P138-143)【关键词】风力发电;叶尖速比;风能利用系数;最大风能捕获;自适应模糊控制;PID 控制【作者】方明星;李月;吴立军;程靖;杜友武【作者单位】安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000;安徽师范大学物理与电子信息学院,安徽芜湖241000【正文语种】中文【中图分类】TP273.4引用格式:方明星,李月,等.风力发电机组最佳功率追踪自适应模糊PID控制[J].安徽师范大学学报:自然科学版,2015,38(2) :138-143.引言风能作为可再生能源,利用风力发电已成为应对能源危机和环境污染的一种重要手段,正越来越受到世界各国的重视[1-4].变速恒频风力发电技术是目前最具规模化开发条件和商业化发展前景的风力发电技术之一,已成为国内外风力发电领域的研究热点[5].变速恒频风力发电系统运行于额定风速以上、附近和以下时,分别有不同的控制目标和控制策略.当其运行于额定风速以上时,通常采用变桨距控制技术保证输出功率平稳[6];运行于额定风速附近时,要求保持转速恒定,实现恒转速运行;运行于额定风速以下时,要求风轮的转速随风速变化并保持恒定的最佳叶尖速比,实现最大风能捕获.本文针对额定风速以下,设计了一种最大风能捕获的控制器.由于风能具有随机性和突发性的特点,风力发电系统的工作点随风的变化时刻变化,表现出高度的时变、非线性特性,常规PlD控制器结构简单、使用方便、工作稳定,但需要知道系统的精确模型,不能很好地解决系统动态与静态之间的矛盾、跟踪设定值与抑制扰动之间的矛盾、鲁棒性与控制性之间的矛盾等.模糊控制是一种智能控制方法,具有控制适应性好和控制过程平滑的特点,不需要对非线性、大延迟等复杂系统建立精确的数学模型,有较强的自适应能力,抗干扰性强等优点[7-9],在风力发电系统中得到了广泛的应用[10,11].文献[12]采用模糊控制对风力机的转速进行控制,实现了转速对给定值的跟踪,但系统稳态误差较大,难以达到较高的控制精度;文献[13]提出了基于自适应模糊控制的转速控制策略,由辨识器和控制器产生电磁转矩指令,取得了较好的控制效果,但该方法需要采集一定数量的样本数据用最近邻聚类算法进行拟合,实现方法比较复杂.本文设计了将PID控制和自适应模糊控制结合起来,构成自适应模糊PID控制,既有模糊控制动态响应好、超调量小的特点,又具有PID控制精度高,能够消除静态误差的特点.为了验证该控制方法的有效性,本文基于matlab工具搭建了变速恒频风力发电机组的仿真模型,对比几种控制方法的控制效果,仿真结果验证了文中提出方法的可行性和优越性.风力发电系统是一个多变量的非线性系统,其精确数学模型的建立是十分困难的.只能深入剖析各子系统的工作状态,提取出其中重要的工作参数,用数学表达式近似拟合子系统的工作过程,并加入一些修正方法,构建出整个系统.风力发电系统可以划分为如下几部分:风速、风轮、传动系统、发电机模型等子系统.采用变速恒频风力发电装置,能大范围调节转速,以此实现因风速变化引起的功率变化,可以最大限度地吸收利用风能,控制上比较灵活,其控制系统结构图如图1所示.1.1风力发电机的捕获功率风力发电机吸收利用风能并将其最终转化为电能,风以一定的速度和方向作用于风轮上,进而转化为旋转力矩而使风轮发生转动,将风能转化为机械能,之后转动的风轮经过齿轮箱变速后驱动发电机旋转产生电能.根据贝兹理论[14],风力机捕捉风能实际能得到的有用功率输出是式中,ρ为空气密度; R为风轮半径,Cp为风能利用系数; v为风速.在风速一定的情况下,风力机捕获的有用功率ps的大小取决于风能利用系数Cp,而Cp是叶尖速比λ和桨距角β的非线性函数αδ[5,6]φ,即由式(2)可得到如图2的Cp(λ,β)函数关系曲线.由图2可知,当桨距角β固定时,只有一个叶尖速比λ对应着相应的最大风能利用系数Cpmax,随着桨距角β的增大,风能利用系数Cp逐渐减小,因此在额定风速以下,为了最大限度捕获风能,桨距角一般取零度,即β= 0°.根据贝兹理论,风能利用系数Cp的极限值约为0.593.而实际情况,Cp最大值只有0.44左右.风轮获得的气动扭矩Tr的关系式为其中,CT为气动转矩系数,w为风轮角速度.1.2 传动系统方程风力发电机组的传动系统主要是由风轮转子,低速轴,增速齿轮箱,高速轴和发电机转子构成的,传动系统的简化运动方程为其中,Jr为风轮转动惯量,n为传动比,Jg为发电机转动惯量,Te为发电机反扭矩.1.3 发电机反扭矩方程发电机模型是由发电机和电力电子器件组成的,由于电力电子器件模型结构复杂性以及动态特性较其他模块变化快,本文忽略其影响,采用绕线式三相异步发电机作为发电机的模拟对象,通过调节定子电压使发电机反力矩和转速发生变化,从而达到变速的要求.发电机反扭矩方程为其中,g为发电机极对数,m1为相数,u1为电压,c1为修正系数,wg为发电机转子转速,w1为发电机同步转速,r1和x1为定子绕组的电阻和漏抗,r2和x2为转子绕组的电阻和漏抗.在额定风速以下,风电机组主控系统一般不向变桨距执行机构发出变桨命令,机组进行变速运行以追求最大风能利用系数,此时风电机组可以视为定桨距运行,桨距角β= 0°.在式(2)中,令β= 0°,得到对式(9)求导,并令其等于0,求得当λ= 10.5时,Cp取得最大值.即在β= 0°时叶尖速比的最佳值为10.5,称作最佳叶尖速比.因此,在低风速时,只要通过控制使叶尖速比保持最佳值,就能使风能利用系数Cp达到最大值,实现最大风能捕获.2.1 PID控制PID控制器是一种比例、积分、微分并联的控制器,应用比较广泛,数学模型可用下式来表示其中,u(t)为控制器的输出,e(t)为控制器输入,在此是叶尖速比的最佳值和实际输出值的差值,即偏差信号,Kp为控制器的比例系数,KI为控制器的积分系数,KD为控制器的微分系数.2.2自适应模糊PID控制模糊控制难以消除系统稳态误差,很难达到较高的控制精度;而PID调节器的积分调节作用可以很好地消除系统的稳态误差.把模糊控制和PID调节器相结合可以增加稳态控制性能.自适应模糊PID控制是将模糊控制与常规的PID控制相结合的一种控制方法.在PID控制的基础上,采用模糊推理,在运行时根据叶尖速比的实际输出值与其最优值间的误差e及误差变化率ec在线实时调整PID参数.模糊推理的输入是误差e和误差变化率ec,输出是比例系数的调整值ΔKp、积分系数的调整值ΔKI和微分系数的调整值ΔKD,在系统运行中,通过不断检测e和ec,利用模糊规则进行模糊推理、查询模糊控制规则表,对3个参数进行在线参数调整,从而使被控对象具有良好的动静态性能.其设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,针对Kp、KI和KD三个参数分别整定.模糊推理输出三个参数的调整量ΔKp、ΔKI和ΔKD,三个调整量分别加上PID控制三个参数的初始值,得到实际PID整定参数.自适应模糊PID控制器原理如图3所示.误差e及误差变化率ec变化范围定义为模糊集上的论域[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],其模糊子集为{ NB,NM,NS,ZO,PS,PM,PB}.e、ec、ΔKp、ΔKI、ΔKD隶属度函数均如图4所示.总结工程设计人员的技术知识和实际操作经验,分别建立ΔKp、ΔΚI和ΔKD的模糊控制规则表,如表1、表2和表3所示.2.3系统仿真模型利用matlab软件中simulink模块,建立风速模型、风力机模型、传动模型、发电机模型,以及整体模型的仿真图.控制系统整体仿真框图如图5所示.本文设计的自适应模糊PID控制器通过模拟额定风速以下的自然风速,以叶尖速比的误差和误差变化率为输入量,通过调节PID控制器参数来改变发电机定子电压,从而改变风轮转速,进而改变叶尖速比以跟踪最佳功率曲线,实现最佳的风能转化效率.本文研究的风力发电机主要参数如下:风轮半径为38.5m,空气密度为1.22kg/m3,发电机电压为690V,风轮转动惯量为3.28106,切入风速为3m/s,额定风速为13m/s,切出风速为25m/s,额定功率为1.5MW.模拟风速模型取值如图6所示,变速恒频风力发电机在此风速作用下,分别采用PID控制、模糊控制及自适应模糊PID控制,分析它们各自的控制效果,得到的风力发电机组的叶尖速比曲线如图7所示,风能利用系数曲线如图8所示,风轮转速曲线如图9所示.从图7-图9可以看出,自适应模糊PID控制器相比其他两种控制器,调节时间短,动态响应速度快,稳态性能好.经过一段时间调节,自适应模糊PID控制器的输出功率峰值基本稳定在1.5MW附近,相比其他两种控制器,能更好地稳定输出功率.分别对图7中叶尖速比λ和图8中风能利用系数Cp在整个运行时间段内求均方根偏差,结果如表4所示.由表4可以看出,采用自适应模糊PID控制器得到的叶尖速比λ和风能利用系数Cp的均方根偏差均远小于其他两种控制结果,控制效果很好.由图7-图9及表4分析可得,自适应模糊PID控制不仅动态响应快、有较强的适应力,且具有较强的稳态性能.本文针对额定风速以下的变速恒频风力发电机,设计了自适应模糊PID控制器,并与模糊控制器及PID控制器的控制效果进行比较.分别针对额定风速以下,对风力发电机组的风能利用系数进行控制,并利用matlab软件进行仿真分析,由仿真结果及相关数据分析可以看出,自适应模糊PID控制相比PID控制和模糊控制,其动态响应效果好、抗干扰性强、控制稳定性高,既克服了模糊控制存在的静差,又解决了PID控制动态响应不理想的问题.该控制器提高了风电系统的响应速度和风能利用率,很好地实现了低风速下对最大风能追踪捕获的控制.【相关文献】[1] LI H,CHEN Z.Overview of different wind generator systems and their comparisons[J].IET Renewable Power Generation,2008,2(2) : 123-128.[2] HAQUE M E,NEGNEVITSKY M,MUTTAQI K M.A novel control strategy for a variable-speed wind turbine with a permanent-magnet synchronous generator[J].IEEE Transaction on Industrial Applications,2010,46(1) :331-339.[3]尹明,李庚银,张建成,等.直驱式永磁同步风力发电机组建模及其控制策略[J].电网技术,2007,31(15) :61-65.[4]赵仁德,王永军,张加胜.直驱式永磁同步风力发电系统最大功率追踪控制[J].中国电机工程学报,2009,29(27) :106-111.[5]刘其辉,贺益康,张建华.交流励磁变速恒频风力发电机的运行控制及建模仿真[J].中国电机工程学报,2006,26(5) :43-50.[6]刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪控制[J].电力系统自动化,2003,27(20) :62-67.[7] SIMOES M G,BOSE B K.Fuzzy logic based intelligent control of a variable speed cage machine wind generation system[J].IEEE Transaction on Power Electronics,2010,l2(1) :87-95.[8]方明星,崔起明,李月,等.基于Mamdani模糊自适应PID的液位串级控制系统设计[J].安徽师范大学学报:自然科学版,2014,37(2) :139-141.[9] GALDI V,PICCOLO A,SIANO P.Designing an adaptive fuzzy controller for maximum wind energy extraction[J].IEEE Transaction on Energy Conversion,2008,23(2) :559-569.[10]张新房,徐大平,吕跃刚,等.大型变速风力发电机组的自适应模糊控制[J].系统仿真学报,2004,16(3) :573-577.[11]李岚,王秀丽.风力发电系统有功功率模糊控制器的设计[J].太阳能学报,2007,28(11) :1272-1277.[12] PRATS M A M,CARRASCO J M,GALVAN E,et al.Improving transition between power optimization and power limitation of variable speed,variable pitch wind turbines using fuzzy control techniques: 21st Century Technology and Industrial Opportunities [C].Nagoya,Aichi,Japan: 26th Annual Conference of the IEEE Industrial-Electronics-Society,2000:1497-1502.[13] ZHANG Xinfang,XU Daping,LIU Yibing.Intelligent control for large-scale variable speed variable pitch wind turbines[J].Journal of Control Theory and Applications,2004,2(3) :305-311.[14]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002:128.。
风电机组模糊滑模变结构恒功率控制研究

最 大 风能 ;在 高 于额 定 风 速时 ,通 过 对 桨距 角 的调节 ,使风 机 以额定功 率输 出M。常用 最大 功率 ] 捕 获方 法主 要 有功 率反 馈 法 、模 糊控 制 法 、混 合 控制法 ” 。本文 研 究将模 糊控 制与滑 模变 结构 等
控 制 算 法相 结 合 ,取长 补 短 用 于风 力 发 电功 率控 制 。仿 真 实验 表 明 ,这 种 方 法 能取 得 比较 理 想 的
变 结 构 控 制 系统 有 一 个 比较 突 出 的缺 点 ,就 是 当系统 从 一 个 结 构 自动 切 换 到 滑 模 结构 ,变 结 构 控 制 系统 受 切 换 开关 非 理 想 等 因 素影 响 ,使 得 滑 动模 态产 生 高 频抖 振 。 “ 振 ”的存 在 ,对控 抖
2 滑模 变结构控制机理分析
为 迅速 。据统 计 ,风 力 发 电平 均 以每 年 3 % 的安 0 装容 量增加 u。为提 高风 电 系统 的稳 定性 和输 出效 率 , 应根 据 风 速变 化 的情 况 调节 风 机 转 速 。在 风 速 较 小时 ,使 其 运 行于 最 优 功 率点 ,从 而捕 获 到
为 电能 ,这 里采 用 的 双 馈异 步 发 电机 是一 个 多输 入 多输 出 系统 ,它 的 定 子 和转 子 各 有三 个 绕 组 ,
上 一 节 的分 析 表 明 ,风 电机 组 是 一 个 强 非 线 性 控 制 系统 ,而 变 结构 控 制 的滑 动 模 态具 有完 全 自适 应性 ,可 以用 来减 少 外 部 环 境扰 动 和 确 定
参 数 ,变 化 参 数 ,数 学描 述 误 差 所带 来 的影 响 。
滑 模 变 结 构 控 制 的 原 理 是 迫 使 系统 在 一 定 条 件 下 ,沿 规 定 的 状 态轨 迹 做 小 幅 度 ,高 频 率 的上 下 运动 。滑 动 模 态可 以设 计 成 为 与 系统 的参 数及 扰 动无 关 。因 而 ,处 于 滑 模 运动 状 态 下 ,系统 具 有
基于模糊控制的风机电动变桨距系统仿真
动机 及其 驱 动器 等 。减 速 装 置 固定 在 轮毂 内 , 转 回 支撑 的内环 安装 在 叶 片 上 , 叶片 轴 承 的外 环 则 固 定
在 轮 毂 上 。 当 电 驱 动 变 桨 距 系 统 上 电 后 , 服 电 动 伺
略 的风 电机 组对 风能 的利 用 比定速 控制 风 电机组 对 风 能 的利用 率高 。
翼
啦
g
1 — 74 71 1 .
E]杜 志 伟 , 峰 , 5 赵 田铭 兴 , .变 速 恒 频 风 力 发 电 的 最 大 功 等 率捕 获 控 制 研 究 [] 电气 传 动 ,0 7 3 3 ) 71 . J. 2 0 , ( 7 :-0
又 定 义 桨 距 为
H 一2 ra  ̄ tn ( 2 1 )
模 糊 控 制 规 则 是 由人 根 据 手 动 控 制 规 则 提 出 的 , 在手 动控制 中, 获得 的信息量基本 上为 3 而 人 个: 差、 误 误差 变化 及误 差 变化率 。所 以模 糊控 制器 的输 入变 量通 常选 为误 差 、 误差 变化及 误 差变 化率 ,
L / i l k中 伺 服 系 统 的 各 调 节 器 、 AB Smui n 比较 器 和 滤波 器等 均 可在 Smuik相 应 工 具箱 中找 到 ; S i l n P B 中有 永磁 同步 电动机 模 型 , 其参 数 在 模 型属 性 中设 定; 电动 机 电流 、 电压测 量 模 块 在 P B的 Me sr— S aue
式 位移传 感 器所 测 的 数 字 不一 样 时 , 即控 制 器 可 知
系统 出现故 障 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
节 风 轮转 速 ,使 其 叶尖 速度 与风 速之 比保持 不变 ,就
可 以获得最 佳 的功率 系 数 。这就 是变 速变 桨风 力发
电机组 进行 转 速控制 的基本 目标 。
发电机采用 双馈异步发 电机 ,它 的定 子绕 组直接
O
● ● I
t t● ¨ 墉
^
图 2 风 力 机 性 能 曲线
= ~ rm
(3)
其 中 :.,,为 风 轮 转 动 发 电 量 ;n为 增 速 箱 传 动
比 ; 为风 轮气 动 转 矩 ;Tm为转 动 轴 递 给 刚 性 齿 轮
的扭 矩 。
风 轮转 矩与 功率 之 间的关 系为 :
Pr 1 2 (A,卢) 3
=
:
仃
(4)
风 力 机 的特 性 通 常 由一 簇 功率 系数 c 的无 因 次 性能 曲线 来表 示 ,功 率 系 数 是 风轮 叶尖 速 比和 桨 距 角 的函数 ,如 图 2所示 。
(1.国网湘潭供 电公司 ,湖 南 湘 潭 4l1100;2.河源供 电局 ,广 东 河源 517000)
摘 要 :风 力发 电机组是复 杂的多变量非 线性 系统 ,受外部干扰 严重 ,具有强耦合 与强 时变性 ,为此 ,为 了更加 方便 的进行控 制 ,本文设计模糊控制 器。首先建立风 力发 电系统仿真模 型,使得在额定风速 以下时,根 据风实现跟踪 最大功 率的 目标 ;在额 定风速 以上 时,控制 风轮 的 桨距 角以调 节风能利 用 系 数 ,实现风力发 电机组 的·巨功率输 出。最后通过 Matlab/simulink仿 真,对所设计 的模糊控制 器进行仿真研 究。 关键 词 :风 能 ;浆 距 角 ;模 糊 控 制 文章编号 :1008—083X(2016)02—0001—05 中图分类号 :TM743 文献标 志码 :B
风力发 电机组 建模 是对 风 力发 电系统 进行 控 制 和优化 的基 础 。文献 [1—5]描 述 了风 力 发 电机组 的 风轮、机械传动系统和简单的发电机模型 ,并介绍 了 一 些建模方 法 。文献 [6—7]建立 了大型 变桨距 机 组 在标称状况 下的非线性数 学模型 ,通 过对气 动机械 部 分的线性化 ,得 到整个系统 的 5阶线性 定常 状态空 间 模型。文献 [8]采用力矩平衡关系,建立了风力发电 机组 的机理模 型 ,在各工况点用 一 阶泰 勒展 开得到 系 统的 5阶状态方 程 。上述仿 真结果 表 明,风力 发 电机 组 的风速 阶跃 响应 时 间短 ,风速 扰动对 机组性 能影 响 最 大 ,桨距角对 系统 各项 参 数 的影 响不 均 匀 ,电 网电 压扰动对 系统 的影 响相对较小 ,但 是 上述文献 中并 没 有提 出一种 最大风能转换 控制系统 。
最大值是贝兹极限59.3% ;A为叶尖速 比(A=一UJrlk ,
贵州 电力 技术
第 19卷
本文 采用 下 面 的公 式计 算 :
fc (A,/3)=0.22( 116—0. 一5)e-半
,
1 一
【A
—
A
+0 .
08卢
IB +1
风 轮 的运动方 程 可表示 为 :
(A, )曲线 是 桨 叶 节 距 角 的 函数 ,从 图 中可 以看 出 Cp(A,JB)曲线 对 桨 叶节 距 角 的变 化 规 律 :当桨 叶 节 距角 逐 渐 增 大 时 c (A, )曲线 将 显 著 地 缩 小 。 如 果保 持桨 距 角不 变 ,可 以用 一 条 曲 线来 描 述 功 率 系数作 为 叶尖速 比的 函数 ,如 图 3所 示 。
接 入 电网 ,转 子绕组通过变 流器 与电 网连接 。通过调 节 定子 电压 就可 以改变 发 电机反力 矩 ,进 而改 变风轮 转 速 ,使得转 速跟随风速 变化 ,捕获 最大风能 。
图 3 定 桨 距 风 力 发 电机 组 的性 能 曲线
由(2)式 可 见 ,在 风 速 给定 的情 况 下 ,风 轮获 得 的功率将取决于功率系数 ,c 值越大风力机将风能 转化为机械能的效率越 高。根据 图 3,在任何风速 下 ,只要使得风轮的叶尖速 比 A=A ,就可 以维持 风 力 机 在 C。 。 下 运 行 。 因此 ,风 速 变 化 时 ,只 要 调
2016年 2月 第 19卷 第 2期
2016,Vol,19,No.2
贵 州 电 力 技 术
GUIZHOU ELECTRIC POW ER TECHNOLOGY
电 网科 技
Power Grid Technology
最 大 风 能 转 换 模 糊 控 制 系统 仿 真 研 究
黄 璐 ,谭 杰 ,付 凯朋 ,唐 武勤 ,边瑞恩
大力 发展 风力 发 电 对保 护 生 态 环 境 、改 善 能 源 结构 、促进 可持 续 发 展都 具 有 重 要 意 义 。如 何最 大 程度的利用风能,一直是各 国科研人员的研究重点 。 由于 风能具 有 能量密 度小 、稳定 性差 等 问题 ,利 用 风 能发 电 比用 水力 发 电困难 得 多 ,使 得 风 力 发 电 系统 在技术上和管理上都出现了一些特殊 问题 。
风力 发 电机组 是 复 杂 的多 变 量非 线 性 系统 ,受 参数 变化 和外 部干扰 严重 ,具有 强耦 合 与强 时变性 , 为此 本文 拟设计 模糊 控制 器 。首先 建立 风力 发 电系 统仿 真模 型 ,使 得 在 额 定 风 速 以下 时 ,根 据 风 速 变 化 ,控 制 电机转 速获得 最佳 叶尖 速 比 ,实 现跟踪 最 大 功 率 的 目标 ;在额 定风 速 以上时 ,控制 风 轮 的桨 距角 以调节 风能 利用 系数 ,实 现 风力 发 电机 组 的恒 功 率 输 出 。最后 通 过 Matlab仿 真 ,对所 设 计 的模糊 控 制 器 进行仿 真研 究 。