【CN110014435A】一种人工智能的机器人【专利】
一种AI智能胆固醇检测、分析诊断的医疗机器人发明专利

一种AI智能胆固醇检测、分析诊断的医疗机器人技术领域本发明涉及AI智能医疗机器人技术领域,特别是涉及一种AI智能胆固醇检测、分析诊断的医疗机器人。
背景技术AI智能医疗机器人可以帮助医生和病患进行疾病诊治,并根据检测的疾病信息进行自动对比分析,得出分析结果,并给出专门的治疗方案,提高医生的治疗效率。
胆固醇检测分析仪一般具有血糖和血脂检测功能,在检测胆固醇的同时,还可以对血糖和血脂进行检测。
现有的胆固醇检测分析仪在使用时,只能简单检测胆固醇的数据,检测操作步骤往往需要手动进行,检测效率得不到提高,同时,现有的胆固醇检测仪在使用时,不具备人脸识别功能,使得检测仪的检测数据与个人信息不能及时匹配,影响检测精准度,还有,现有的胆固醇检测仪在使用时,不具备进行银行卡付费的功能,银行卡存在被遗留的问题,因此急需一种AI智能胆固醇检测、分析诊断的医疗机器人来解决现有问题。
发明内容本发明的目的就在于为了解决上述问题而提供一种AI智能胆固醇检测、分析诊断的医疗机器人。
本发明通过以下技术方案来实现上述目的:一种AI智能胆固醇检测、分析诊断的医疗机器人,包括外壳,所述外壳一侧设置有手指放置槽,所述手指放置槽上侧设置有试纸插槽板,所述试纸插槽板一端设置有旋转臂,所述旋转臂上侧通过螺纹连接有微痛采血针,所述旋转臂远离所述微痛采血针一端设置有安装板,所述安装板下侧设置有二号旋转电机,所述试纸插槽板远离所述旋转臂一端设置有二号电动推杆,所述手指放置槽一端设置有一号电动推杆,所述外壳上侧设置有身份证传感器,所述身份证传感器上部一侧面设置有银行卡插槽,所述银行卡插槽上侧设置有激光传感器,所述外壳上部一边侧焊接有侧挡板,所述侧挡板上部中心位置设置有人脸识别摄像头,所述人脸识别摄像头外部侧面设置有齿槽,所述侧挡板上对应所述齿槽位置设置有一号旋转电机,所述微痛采血针下端一侧设置有红外接触传感器,所述人脸识别摄像头一端设置有连接线。
进一步的,所述外壳内部设置有人工智能处理模块,所述人工智能处理模块下侧设置有通讯模块,所述人工智能处理模块一侧设置有扬声器。
一种机器人[实用新型专利]
![一种机器人[实用新型专利]](https://img.taocdn.com/s3/m/cd04acc0915f804d2a16c1aa.png)
专利名称:一种机器人
专利类型:实用新型专利
发明人:王建胜
申请号:CN201821532292.3申请日:20180919
公开号:CN208773607U
公开日:
20190423
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种机器人,其包括本体,本体上设有机械手臂、摄像头、座椅、扶手、触控显示屏、伸缩支撑杆、吸尘装置,本体底部设有两平衡轮和两调节轮,两调节轮与本体之间通过调节支架连接,调节支架用于调节调节轮到平衡轮之间的距离,座椅的上端与本体转动连接,伸缩支撑杆的一端与本体连接,另一端与座椅的底部连接,伸缩支撑杆用于调节座椅的角度,吸尘装置包括吸尘头、抽风机、集尘袋,吸尘头与抽风机通过管道连接,集尘袋设于吸尘头与抽风机之间,吸尘头设于本体底部。
本实用新型的机器人可以为行动不便的老人提供代步服务,同时,其吸尘装置可以在机器人运动的同时打扫房间卫生,不再需要吸尘器进行打扫。
申请人:苏州大学
地址:215131 江苏省苏州市相城区济学路8号
国籍:CN
代理机构:苏州市中南伟业知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。
一种智能AI机器人[实用新型专利]
![一种智能AI机器人[实用新型专利]](https://img.taocdn.com/s3/m/fec358f26bd97f192379e9b6.png)
专利名称:一种智能AI机器人专利类型:实用新型专利
发明人:乐文锋
申请号:CN201921809743.8申请日:20191025
公开号:CN211030026U
公开日:
20200717
专利内容由知识产权出版社提供
摘要:本实用新型涉及智能机器人领域,公开了一种智能AI机器人,针对现有技术中的智能AI机器人结构设计简单的问题,现提出如下方案,其包括机器人本体,所述机器人本体包括机器人主体和机器人头部,所述机器人头部固定于机器人主体的顶部,所述机器人主体的内部固定有蓄电池、控制器和电路板,所述机器人主体的正面开设有放置槽,放置槽的两侧均开设有滑槽,放置槽的内部设有放置板,放置板的厚度大于放置槽的深度,所述放置板一端贯穿设置有转轴。
本实用新型结构合理,设计巧妙,操作简单,解决了现有技术中的智能AI机器人结构设计简单的问题,设计更加的人性化,增加了用户的体验感。
申请人:安徽科麦斯物联网科技有限公司
地址:230000 安徽省合肥市高新区望江西路800号合肥创新产业园A1栋308室
国籍:CN
代理机构:合肥律众知识产权代理有限公司
代理人:王雷
更多信息请下载全文后查看。
一种人工智能教育机器人[实用新型专利]
![一种人工智能教育机器人[实用新型专利]](https://img.taocdn.com/s3/m/89812adc67ec102de3bd89c3.png)
专利名称:一种人工智能教育机器人专利类型:实用新型专利
发明人:喻华明
申请号:CN201920534700.7
申请日:20190419
公开号:CN210025308U
公开日:
20200207
专利内容由知识产权出版社提供
摘要:本实用新型提供一种人工智能教育机器人,包括PC机、主控单元和驱动单元,PC机连接主控单元,主控单元连接驱动单元,主控单元包括无线网卡、红外传感器电路、测温传感器、CMOS摄像头和主控制器,无线网卡、红外传感器电路、测温传感器和CMOS摄像头分别连接主控制器,驱动单元包括AVR单片机、驱动电路、左右轮电机和编码器,本实用新型设计合理,使用方便,通过寻迹方式行驶,运行稳定,在到达各地形标志物时,能对不同标志物进行温度、距离、光频率的测量,并通过无线网络向PC机发送数据或图像,PC机上位机上显示的温度、距离数据准确。
申请人:铜仁职业技术学院
地址:554300 贵州省铜仁市川硐教育园区铜仁职业技术学院
国籍:CN
代理机构:北京汇捷知识产权代理事务所(普通合伙)
代理人:李宏伟
更多信息请下载全文后查看。
【CN110013374A】一种智能优瘦机器人【专利】
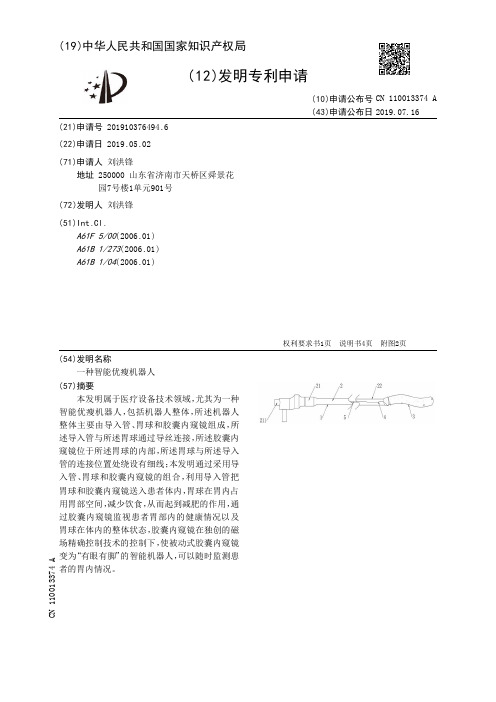
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910376494.6(22)申请日 2019.05.02(71)申请人 刘洪锋地址 250000 山东省济南市天桥区舜景花园7号楼1单元901号(72)发明人 刘洪锋 (51)Int.Cl.A61F 5/00(2006.01)A61B 1/273(2006.01)A61B 1/04(2006.01)(54)发明名称一种智能优瘦机器人(57)摘要本发明属于医疗设备技术领域,尤其为一种智能优瘦机器人,包括机器人整体,所述机器人整体主要由导入管、胃球和胶囊内窥镜组成,所述导入管与所述胃球通过导丝连接,所述胶囊内窥镜位于所述胃球的内部,所述胃球与所述导入管的连接位置处绕设有细线;本发明通过采用导入管、胃球和胶囊内窥镜的组合,利用导入管把胃球和胶囊内窥镜送入患者体内,胃球在胃内占用胃部空间,减少饮食,从而起到减肥的作用,通过胶囊内窥镜监视患者胃部内的健康情况以及胃球在体内的整体状态,胶囊内窥镜在独创的磁场精确控制技术的控制下,使被动式胶囊内窥镜变为“有眼有脚”的智能机器人,可以随时监测患者的胃内情况。
权利要求书1页 说明书4页 附图2页CN 110013374 A 2019.07.16C N 110013374A权 利 要 求 书1/1页CN 110013374 A1.一种智能优瘦机器人,包括机器人整体(1),其特征在于:所述机器人整体(1)主要由导入管(2)、胃球(3)和胶囊内窥镜(6)组成,所述导入管(2)与所述胃球(3)通过导丝(5)连接,所述胶囊内窥镜(6)位于所述胃球(3)的内部,所述胃球(3)与所述导入管(2)的连接位置处绕设有细线(4),所述细线(4)贯穿输出管(22)且与所述胃球(3)卡合连接,所述导入管(2)包括输入管(21)、输出管(22)、连接管(23)、捏片(24)和排气管(25),所述输入管(21)与所述输出管(22)一体成型,所述连接管(23)与所述输入管(21)卡合连接,所述胃球(3)的顶端开设有胃球连接孔(31),所述导丝(5)贯穿所述导入管(2)且延伸至所述胃球连接孔(31)的内部,所述胶囊内窥镜(6)包括微型摄像机(61)、LED灯(62)、数字处理芯片(63)、电池(64)和无线收发组件(65),所述微型摄像机(61)、数字处理芯片(63)、电池(64)和无线收发组件(65)从左至右依次分布在所述胶囊内窥镜(6)的内部,所述LED灯(62)位于所述微型摄像机(61)的外侧,所述微型摄像机(61)、所述LED灯(62)、所述数字处理芯片(63)和所述无线收发组件(65)均与所述电池(64)电性连接,所述微型摄像机(61)和所述LED灯(62)均与所述数字处理芯片(63)信号连接,所述数字处理芯片(63)通过所述无线收发组件(65)与外部设备信号连接。
一种机器人[发明专利]
![一种机器人[发明专利]](https://img.taocdn.com/s3/m/897f725549d7c1c708a1284ac850ad02de80071e.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710469865.6(22)申请日 2017.06.20(71)申请人 广东锐拓精密工业有限公司地址 523602 广东省东莞市谢岗镇大龙村凉帽岗(72)发明人 胡云青 (74)专利代理机构 北京集佳知识产权代理有限公司 11227代理人 张春水 唐京桥(51)Int.Cl.B25J 11/00(2006.01)(54)发明名称一种机器人(57)摘要本发明公开了一种机器人,包括机器人主体以及与机器人主体连接的机器人手臂;机器人主体包括底座、上身固定座以及头部固定座;其中,底座内部设有主电机,主电机连接一个下身气动机构,通过主电机,可驱动下身气动机构以驱动底座转动。
机器人手臂包括与机器人主体转动连接的机器人肩膀,机器人肩膀包括第一电机,通过第一电机可驱动机器人后臂旋转;机器人后臂包括第二电机,通过第二电机可驱动机器人前臂摆动;机器人前臂包括第三电机,通过第三电机可驱动机械手腕旋转。
本发明实施例通过设置多个驱动装置以及活动关节,实现了一种能够灵活运动的机器人。
权利要求书1页 说明书4页 附图8页CN 107116562 A 2017.09.01C N 107116562A1.一种机器人,其特征在于,包括机器人主体以及与所述机器人主体连接的机器人手臂;所述机器人主体包括底座、上身固定座以及头部固定座;其中,所述底座内部设有主电机,所述主电机连接一个下身气动机构,通过所述主电机,可驱动所述下身气动机构以驱动所述底座转动;所述下身气动机构连接主传动轴,所述主传动轴连接上身固定座;所述上身固定座连接头部转动马达,所述头部转动马达顶部连接头部固定座;通过主电机驱动所述头部转动马达可实现机器人头部固定座自由转动;所述机器人手臂包括与所述机器人主体转动连接的机器人肩膀,所述机器人肩膀包括第一电机,所述第一电机连接机器人后臂,通过所述第一电机可驱动所述机器人后臂旋转;所述机器人后臂包括第二电机,所述第二电机与机器人前臂连接,通过所述第二电机可驱动所述机器人前臂摆动;所述机器人前臂包括第三电机,所述第三电机连接机械手腕,通过所述第三电机可驱动所述机械手腕旋转。
一种机器人[发明专利]
![一种机器人[发明专利]](https://img.taocdn.com/s3/m/ec19702c53ea551810a6f524ccbff121dd36c578.png)
专利名称:一种机器人
专利类型:发明专利
发明人:钱阳明,陈新普,田可心申请号:CN202111580423.1申请日:20211222
公开号:CN114012762A
公开日:
20220208
专利内容由知识产权出版社提供
摘要:本申请公开了一种机器人,涉及机器人技术领域。
机器人包括躯体、舵机、颈部、旋转组件和连接线。
舵机设置于躯体;颈部设置于躯体的顶部;颈部与旋转组件连接,舵机用于驱动旋转组件转动,以带动颈部转动,且旋转组件靠近颈部的一侧设置有穿线孔,旋转组件靠近舵机的一侧设置有开口;连接线的一端与机器人的头部主板连接,连接线依次穿设于穿线孔和开口,且另一端与躯体内的线路板连接。
本申请的机器人,通过在连接颈部的旋转组件上开设穿线孔和开口,使连接头部主板和躯体内线路板的连接件从该连接孔进行走线。
这样,在颈部活动时,避免了连接线被拉扯,进而延长了连接线的使用寿命。
申请人:深圳市优必选科技股份有限公司
地址:518000 广东省深圳市南山区学苑大道1001号南山智园C1栋16、22楼
国籍:CN
代理机构:北京超凡宏宇专利代理事务所(特殊普通合伙)
代理人:王新哲
更多信息请下载全文后查看。
仿生机器人专利

仿生机器人专利摘要:本文旨在介绍一项关于仿生机器人的专利技术。
通过模拟生物的形态结构和行为能力,仿生机器人具有较高的智能和适应能力,可应用于诸多领域。
本专利通过对仿生机器人的结构和功能进行创新,提出一种全新的仿生机器人设计方案。
一、背景随着科技的进步和人工智能的发展,仿生机器人成为了研究的热点之一。
仿生机器人模仿生物体的结构、功能和行为,可以在环境中灵活自如地执行各种任务,具有广阔的应用前景。
然而,现有的仿生机器人设计存在一些问题,如结构复杂、运动效率低等。
因此,本专利旨在提出一种创新的仿生机器人设计方案,解决现有技术中存在的问题。
二、发明内容本专利提出了一种新颖的仿生机器人设计方案,通过改进仿生机器人的结构和功能,提高其性能和效率。
具体包括以下几个方面:1. 结构设计本专利提出了一种新型的仿生机器人结构设计方案,该方案采用了模块化的设计理念。
将仿生机器人的主体分为多个模块,每个模块具有独立的功能和任务,可以根据需要进行组合和拆分。
这种结构设计不仅能够提高仿生机器人的适应性和可扩展性,还可以降低制造难度和维护成本。
2. 运动控制在仿生机器人的运动控制方面,本专利提出了一种基于神经网络的控制方法。
通过采集仿生机器人的外部环境信息和内部传感器数据,利用神经网络进行实时计算和决策,从而实现仿生机器人的智能化控制。
这种控制方法能够提高仿生机器人的反应速度和运动精度,提高其在实际应用中的适应能力。
3. 材料选择在仿生机器人的材料选择方面,本专利提出了一种新型的材料组合方案。
根据仿生机器人的功能需求和运动特点,选择了一种具有高强度和轻质的材料作为机器人的主要结构材料,同时采用了一种柔软可伸缩的材料作为机器人的外观覆盖材料。
这种材料组合方案不仅能够提高仿生机器人的耐久性和运动效率,还能够增加机器人的观赏性和亲和力。
三、创新点与现有技术相比,本专利的创新点主要包括以下几个方面:1. 模块化的结构设计,提高了仿生机器人的适应性和可扩展性。
一种新型智能机器人[实用新型专利]
![一种新型智能机器人[实用新型专利]](https://img.taocdn.com/s3/m/6935dc9ca417866fb94a8e07.png)
专利名称:一种新型智能机器人专利类型:实用新型专利
发明人:江志皓,仇飞
申请号:CN201921061268.0申请日:20190708
公开号:CN210285490U
公开日:
20200410
专利内容由知识产权出版社提供
摘要:本实用新型涉及机器人技术领域,且公开了一种新型智能机器人,包括底座,所述底座的内壁螺纹连接有桶体,所述桶体的表面滑动连接有卡环,所述底座的内壁底部开设有通孔,所述底座的内壁底部固定连接有弹簧,所述弹簧的顶部固定连接有支撑网,所述支撑网的表面固定连接有滑环,所述滑环的表面与桶体的内壁滑动连接。
本实用新型通过支撑环、电动推杆、连接环、密封机构、第一红外测距传感器、第二红外测距传感器、压力传感器、弹簧、支撑网和控制器,当扔垃圾时,游客的手或垃圾从第二红外测距传感器上滑过,通过控制器将电动推杆打开,使连接环向下移动,进而使密封板打开,便于游客将垃圾投入桶体内。
申请人:南京晓庄学院
地址:211100 江苏省南京市江宁区弘景大道3601号
国籍:CN
代理机构:合肥方舟知识产权代理事务所(普通合伙)
代理人:朱荣
更多信息请下载全文后查看。
一种机器人[发明专利]
![一种机器人[发明专利]](https://img.taocdn.com/s3/m/d15977a782d049649b6648d7c1c708a1284a0a3b.png)
专利名称:一种机器人
专利类型:发明专利
发明人:王祥祥,顾鹏飞,林睿,曹俊,赵小品申请号:CN202210105070.8
申请日:20220128
公开号:CN114393594A
公开日:
20220426
专利内容由知识产权出版社提供
摘要:本发明涉及自动化生产技术领域,具体公开了一种机器人,该机器人包括底座、七个关节和七个驱动组件。
其中,七个关节首尾转动连接,第一关节转动连接于底座。
七个驱动组件分别驱动七个关节动作;第六驱动组件和第七驱动组件均位于第五关节内。
线束自底座起依次经过第一关节、第二关节、第三关节、第四关节进入第五关节,并在沿途分别与第一驱动组件、第二驱动组件、第三驱动组件、第四驱动组件和第五驱动组件电连接,位于第五关节内的线束分别与第六驱动组件和第七驱动组件电连接。
上述设置,使得整个机器人的重心后移,进而提高了上下料的稳定性,还能提高各关节以及驱动各关节的驱动组件的使用寿命,进而提高七轴机器人的使用可靠性。
申请人:苏州灵猴机器人有限公司
地址:215104 江苏省苏州市苏州吴中经济开发区越溪街道苏旺路328号12幢
国籍:CN
代理机构:北京品源专利代理有限公司
代理人:王士强
更多信息请下载全文后查看。
智能机器人的人机对话流程自动流转方法及系统[发明专利]
![智能机器人的人机对话流程自动流转方法及系统[发明专利]](https://img.taocdn.com/s3/m/3a0095cabcd126fff6050b72.png)
专利名称:智能机器人的人机对话流程自动流转方法及系统专利类型:发明专利
发明人:肖伟翼
申请号:CN202011143010.2
申请日:20201023
公开号:CN112015880A
公开日:
20201201
专利内容由知识产权出版社提供
摘要:本发明提供一种智能机器人的人机对话流程自动流转方法及系统,该方法包括:在根据用户输入信息进入到预设流程的当前连线的源节点后,判断所述预设流程的当前连线的属性是否为用于表征流程自动流转的自动属性;若所述预设流程的连线的属性为所述自动属性,则根据所述用户输入信息确定所述预设流程是否满足所述当前连线通的通过条件,在满足所述当前连线通的通过条件时,所述预设流程通过所述当前连线直接流转到对应的目标节点。
本发明支持用户的单次输入可促使流程走多步,不再需要用户重复提及部分信息,提升处理效率以及用户体验。
申请人:和美(深圳)信息技术股份有限公司
地址:518040 广东省深圳市福田区沙头街道泰然工贸园苍松大厦1301室
国籍:CN
代理机构:北京锺维联合知识产权代理有限公司
代理人:安娜
更多信息请下载全文后查看。
一种智能机器人[实用新型专利]
![一种智能机器人[实用新型专利]](https://img.taocdn.com/s3/m/26a461baad02de80d5d840dd.png)
专利名称:一种智能机器人专利类型:实用新型专利
发明人:魏麟懿
申请号:CN201820222108.9申请日:20180208
公开号:CN207992781U
公开日:
20181019
专利内容由知识产权出版社提供
摘要:本实用新型提供一种智能机器人,包括环境监测单元、中央处理单元、语音信号播放单元和语音信号采集单元;所述环境监测单元用于采集机器人所处环境的环境参数信息;所述中央处理单元用于根据所述环境参数信息输出与所述环境参数信息对应的语音询问信息,并在控制所述语音信号播放器单元播放所述语音询问信息之后,控制所述语音信号采集单元采集语音回复信号;所述中央处理单元还用于根据接收到的语音回复信号输出用电器控制信号,所述用电器控制信号用于控制与所述机器人关联的用电器的工作状态。
本实用新型能够根据采集的环境参数信息,进行用电器的语音智能控制,具有控制方式简单灵活的特点,为人们的生活提供了较多的便利。
申请人:魏麟懿
地址:276800 山东省日照市东港区海曲中路13号
国籍:CN
代理机构:北京天奇智新知识产权代理有限公司
代理人:陈永宁
更多信息请下载全文后查看。
一种智能机器人[发明专利]
![一种智能机器人[发明专利]](https://img.taocdn.com/s3/m/01105be6b8f3f90f76c66137ee06eff9aef84915.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710388979.8(22)申请日 2017.05.26(71)申请人 成都福莫斯智能系统集成服务有限公司地址 610000 四川省成都市成华区龙潭工业园成济路7号(72)发明人 梁祥义 杨鹰 周安勇 李孝明 (51)Int.Cl.B25J 11/00(2006.01)(54)发明名称一种智能机器人(57)摘要本发明公开了一种智能机器人,包括机器人本体,所述机器人本体包括头部、躯干部、手部和足部,所述机器人本体的手部为机械臂,机械臂末端设有温度感应器,在机器人本体头部内设有中央控制器,且在头部还设有一个发声器和两个红外摄像仪,所述躯干部内设有驱动装置,所述驱动装置与机器人本体的手部和足部相连,所述温度感应器、发声器和红外摄像仪分别与中央控制器相连,所述驱动装置通过中央控制器控制运行。
其针对婴幼儿设计,能够辅助成年人照顾和教育1-3岁的婴幼儿,减轻养育者负担,使成年养育者能够得到适当的空闲以完成其他工作或生活任务。
权利要求书1页 说明书3页 附图2页CN 106976097 A 2017.07.25C N 106976097A1.一种智能机器人,包括机器人本体,所述机器人本体包括头部、躯干部、手部和足部,其特征在于,所述机器人本体的手部为机械臂,机械臂末端设有温度感应器,在机器人本体头部内设有中央控制器,且在头部还设有一个发声器和两个红外摄像仪,所述躯干部内设有驱动装置,所述驱动装置与机器人本体的手部和足部相连,所述温度感应器、发声器和红外摄像仪分别与中央控制器相连,所述驱动装置通过中央控制器控制运行。
2.根据权利要求1所述的一种智能机器人,其特征在于,所述机器人本体外部表层附着有一层保护层,所述保护层为天鹅绒织物。
3.根据权利要求1所述的一种智能机器人,其特征在于,所述中央控制器设有语音识别模块、语音输出模块和图像分析模块,所述语音识别模块与一个声音传感器相连,所述声音传感器设于机器人本体躯干部表面,语音输出模块与发声器相连,所述图像分析模块与红外摄像仪相连。
智能机器人技术专利申请书模板

智能机器人技术专利申请书模板申请人姓名:XXX申请人地址:XXX发明名称:智能机器人技术专利申请号:XXXXX申请日:XXXX年XX月XX日一、技术领域本专利涉及智能机器人技术,特别是一种智能机器人的发明。
二、背景技术在现代科技的不断进步下,智能机器人已经成为工业、医疗、家庭等多个领域的研究热点。
目前智能机器人已经能够通过传感器感知环境信息,进行语音识别、图像识别和运动控制等操作。
然而,目前的智能机器人仍然存在一些问题,如智能度不高、运动灵活性不足等。
因此,本申请旨在提出一种具有更高智能度和灵活性的智能机器人技术。
三、发明内容本发明提供一种智能机器人技术,包括以下几个方面的创新点:1. 智能感知系统:采用超声波、红外线等传感器与计算机视觉技术相结合,实现对环境的智能感知和识别。
2. 运动控制系统:采用先进的运动控制算法,实现智能机器人的运动轨迹规划和运动路径决策,以提高机器人的运动灵活性和人机交互的效果。
3. 语音识别系统:通过采用语音识别技术,实现对语音指令的识别,使智能机器人可以通过语音与用户进行实时交流。
4. 人机交互界面:提供一种友好的用户界面,方便用户与智能机器人进行交互和指令输入。
五、实施方式本发明的实施方式可以通过以下步骤来实现:1. 设计并搭建智能机器人的硬件平台,包括传感器、运动控制器、语音识别模块等。
2. 开发智能机器人的软件系统,包括智能感知系统、运动控制系统、语音识别系统和人机交互界面。
3. 进行实验验证,测试智能机器人在各种环境下的感知和控制能力,以及语音识别和人机交互效果。
六、发明效果本发明的技术方案具有以下优点:1. 具有更高的智能度,能够更准确地感知和识别环境。
2. 运动灵活性更高,能够根据环境和指令进行自主运动。
3. 语音识别准确性高,可以进行实时的语音交流。
4. 人机交互界面友好,提供更好的用户体验。
七、权利要求书根据本申请的发明内容,我们向专利局提出以下权利要求:1. 一种智能机器人技术,包括智能感知系统、运动控制系统、语音识别系统和人机交互界面。
一种人工智能教育机器人[实用新型专利]
![一种人工智能教育机器人[实用新型专利]](https://img.taocdn.com/s3/m/988447a6852458fb760b563c.png)
专利名称:一种人工智能教育机器人专利类型:实用新型专利
发明人:肖卓宇
申请号:CN202021916757.2
申请日:20200904
公开号:CN213042461U
公开日:
20210423
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种人工智能教育机器人,涉及到教育机器人技术领域,包括机器人壳体,所述机器人壳体正面顶部设置有显示屏保护组件;所述显示屏保护组件包括两个平行设置的L形板,两个所述L形板均与机器人壳体固定连接,两个所述L形板底端固定设置有底部密封板,两个所述L形板之间设置有安装框,所述安装框内侧固定设置有钢化玻璃防护板以及安装框背面粘接设置有橡胶密封圈。
本实用新型在避免显示屏表面产生磕伤或划痕的同时,还可以避免灰尘附着在显示屏上不便清理的问题,后续清理时,直接对钢化玻璃防护板进行清洗即可,相较于现有技术中的同类型装置,本实用新型有效降低清洗难度,实际使用更加方便。
申请人:湖南工业职业技术学院
地址:410000 湖南省长沙市含浦科教园
国籍:CN
代理机构:广东有知猫知识产权代理有限公司
代理人:吴国文
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910339707.8
(22)申请日 2019.04.25
(71)申请人 周信宏
地址 710000 陕西省西安市未央区学府中
路2号
(72)发明人 周信宏 王建华
(51)Int.Cl.
B25J 11/00(2006.01)
B25J 19/00(2006.01)
B25J 19/06(2006.01)
(54)发明名称一种人工智能的机器人(57)摘要本发明提供一种人工智能的机器人,包括第一外壳,第二外壳,机器头,开关门,辅助轮,无刷电机,轴承,移动轮,支撑柱,电路板,散热片,第一WIFI模块,启动开关,第二WIFI模块,触摸屏,蓄电池,摄像头,可减震放置手臂结构,防护套接架结构,散热处理筒结构和辅助清理放置板盒结构,所述的第一外壳和第二外壳相互一体化设置;所述的机器头螺栓安装在第二外壳的上表面中间部位;所述的开关门轴接在第二外壳内部的左下侧。
本发明的有益效果为:通过可减震放置手臂结构的设置,能够随之通过保护弹簧的弹力使固定边对放置盘起到固定的作用,同时在运输时,能够起到减小震动的功能,并避免了菜盘上
的菜出现轻易掉落的问题。
权利要求书2页 说明书6页 附图4页CN 110014435 A 2019.07.16
C N 110014435
A
权 利 要 求 书1/2页CN 110014435 A
1.一种人工智能的机器人,其特征在于,该人工智能的机器人,包括第一外壳(1),第二外壳(2),机器头(3),开关门(4),辅助轮(5),无刷电机(6),轴承(7),移动轮(8),支撑柱(9),电路板(10),散热片(11),第一WIFI模块(12),启动开关(13),第二WIFI模块(14),触摸屏(15),蓄电池(16),摄像头(17),可减震放置手臂结构(18),防护套接架结构(19),散热处理筒结构(20)和辅助清理放置板盒结构(21),所述的第一外壳(1)和第二外壳(2)相互一体化设置;所述的机器头(3)螺栓安装在第二外壳(2)的上表面中间部位;所述的开关门(4)轴接在第二外壳(2)内部的左下侧;所述的辅助轮(5)分别轴接在第一外壳(1)内壁左右两侧的下部;所述的无刷电机(6)分别螺栓安装在第一外壳(1)内壁中间部位下侧的前后两部;所述的轴承(7)分别镶嵌在第一外壳(1)内部中间部位下侧的前后两部,且轴承(7)内插接有无刷电机(6)的输出轴;所述的移动轮(8)键连接在无刷电机(6)的输出轴上;所述的支撑柱(9)分别一体化设置在第二外壳(2)内壁后部的中间部位;所述的电路板(10)螺栓安装在支撑柱(9)的上端;所述的散热片(11)、第一WIFI模块(12)和第二WIFI模块(14)分别电性连接在电路板(10)的上表面;所述的启动开关(13)镶嵌在第二外壳(2)前表面的中间部位;所述的触摸屏(15)镶嵌在第二外壳(2)左表面的中间部位;所述的蓄电池(16)放置在第二外壳(2)内部的下侧;所述的摄像头(17)镶嵌在机器头(3)的右上部;所述的可减震放置手臂结构(18)安装在第二外壳(2)的上部;所述的防护套接架结构(19)安装在可减震放置手臂结构(18)上;所述的散热处理筒结构(20)安装在第一外壳(1)的左侧;所述的辅助清理放置板盒结构(21)安装在第一外壳(1)右侧;所述的可减震放置手臂结构(18)包括第一连接螺栓(181),第一手臂杆(182),第二连接螺栓(183),第三手臂杆(184),保护弹簧(185),固定边(186)和放置盘(187),所述的第一连接螺栓(181)穿过第一手臂杆(182),并分别螺纹连接在第二外壳(2)前后表面的上部中间部位;所述的固定边(186)焊接在保护弹簧(185)的内壁上;所述的放置盘(187)插接在固定边(186)和固定边(186)之间。
2.如权利要求1所述的人工智能的机器人,其特征在于,所述的防护套接架结构(19)包括竖立杆(191),防护布(192),固定螺栓(193),套接条(194),防护盒(195)和分离隔板(196),所述的竖立杆(191)分别焊接在第三手臂杆(184)前表面的左右两侧;所述的防护布(192)通过固定螺栓(193)固定在竖立杆(191)和竖立杆(191)之间;所述的套接条(194)焊接在竖立杆(191)的下端;所述的防护盒(195)通过固定螺栓(193)固定在套接条(194)的下部。
3.如权利要求1所述的人工智能的机器人,其特征在于,所述的散热处理筒结构(20)包括连接筒(201),组装管(202),通孔(203),散热电机(204),风叶(205)和防护网罩(206),所述的连接筒(201)镶嵌在第一外壳(1)内部的左侧;所述的组装管(202)一体化设置在连接筒(201)的右上部;所述的通孔(203)开设在连接筒(201)的右表面;所述的散热电机(204)螺栓安装在连接筒(201)的内壁上,同时在散热电机(204)的输出轴上套接有风叶(205)。
4.如权利要求1所述的人工智能的机器人,其特征在于,所述的辅助清理放置板盒结构(21)包括储物盒(211),防护袋(212),组装板(213),组装套接孔(214),插接板(215),清理垫(216)和连接轮(217),所述的储物盒(211)胶接在组装板(213)的上表面;所述的防护袋(212)插入在储物盒(211)内;所述的组装板(213)镶嵌在第一外壳(1)的右端;所述的组装套接孔(214)开设在组装板(213)的下表面;所述的插接板(215)和清理垫(216)相互胶接,且插接板(215)插入在组装套接孔(214)内;所述的连接轮(217)螺栓安装在组装板(213)的
2。