风速传感器 说明书
风速传感器(CW—1)

维护与修理
用户应指派专人使用和维护传感器,使用前 详细阅读说明书; • 使用过程中应两天用软布清扫传感头内外上 的积尘和水雾,严禁用硬物刮擦传感头外的 保护层。 • 传感器安装调校好后遥控器应指派专人保管; • 传感器为本质安全型电路,用户修理时应指 派受过专门训练的人员进行维修,不得擅自 更改参数。 •
传感器调校
• 将传感器放置在风硐中,在无风时调节 W2使信号输出为2000HZ或1mA。(零 点在出厂时已调好,一般不动)。 • 传感器量程为0—15m/s,调校分5档。 风洞开到任意位置时,遥控器对准传感 器按动粗调和细调上、下按钮,使传感 器显示值现风洞风速相同即可 ; • 井下调校时,严禁用矿灯直照显传感器上方插 座上好旋紧。四芯电缆线在连接时,一定要 严格按颜色要求接线:红色线——电源正极 (电缆插头1号口),蓝色或黑色线——电源 负极或信号负极(电缆插头2号口),白色或 黄色线——连接分站信号线(电缆插头3号 口),绿色线——不使用。 • 注:信号线与分站接通后传感器左侧指示灯 应点亮。
风速传感器( 风速传感器(CW—1) )
安装
• 风速传感器可安装在主要测风站和进回风巷 等地。安装地应在距顶板较好无明显淋水, 不妨碍运输和行人安全的地方,传感头指向 应与风流方向一致。安装前应首先测量通道 平均风速,任选一点安装,遥控器对准传感 器按动上、下键,使就地显示为平均风速即 可; • 注意:传感器安装一定要牢固,不得摆动, 传感器测风面一定要垂直风流方向。
Met One 010C 风速传感器用户手册说明书

MODEL010CWIND SPEED SENSOROPERATION MANUALMet One Instruments, IncCorporate Sales & Service: 1600 NW Washington Blvd. Grants Pass, OR 97526 Tel (541) 471-7111 Fax (541) 471-7116******************1.0 GENERAL INFORMATION1.1 The 010C Wind Speed Sensor uses a durable, three-cup anemometer assembly andsolid-optical link with a 40-slot chopper disk to produce a pulsed output whosefrequency is proportional to wind speed. An internal heater reduces moisture forextended bearing life. This sensor is usually used in conjunction with the 191 Cross arm Assembly. The sensor may be used with a translator module, or used directlywith a variety of data loggers.1.2 The Sensor Cable has a quick-connect connector with vinyl jacketed, shielded cable.Cable length is given in -XX feet on each cable part number. A 1953-XX cable isused with translators having terminal strip connections.Table 1-1Model 010C Wind Speed Sensor SpecificationsPerformance CharacteristicsMaximum Operating Range 0-60 meters/sec or 0-125 mphStarting Speed 0.27 meters/sec or 0.6 mphCalibrated Range 0-50 meters/sec or 0-100 mphAccuracy ±1% or 0.15 mphTemperature Range -50︒C to +85︒CResponse Distance constant less than 5 ft of flow**The distance traveled by the air after a sharp-edged gust has occurred for theanemometer rate to reach 63% of the new speed. Distant constant less than 15ft of flow with optional 010C-1 aluminum cupset.Electrical CharacteristicsPower Requirements 12 VDC at 10 mAOutput Signal 11-volt pulseOutput Impedance 100 ohms maximumHeater Power Requirement 12 VDC at 350 mAStandard Cable Length 300’ maximum (consult factory if longercable is to be used for special requirements) Physical CharacteristicsWeight 1.1 poundsFinish Anodized aluminumMounting Use with 191 CrossarmCabling 1953-XX Cable (XX is cable length in feet)Optional AccessoriesA. External heater and power supply for extreme low temperature operation.B. Ice Skirt for extreme icing environments.C. Aluminum cup assembly.2.0 INSTALLATION2.1 The 010C Wind Speed InstallationA. Mount the cup assembly and secure with the Allen head set screw, check to seethat the cup assembly rotates freely.B. Install the sensor in the end of the Model 191 Crossarm Assembly (the endwithout the bushing).C. Tighten the locking set screw. Do not over-tighten. Apply a small amount ofsilicone grease to set screws to prevent freezing in adverse environments.D. Connect the cable assembly to the keyed sensor receptacle and tape it to themounting arm.2.2 WiringA. The cable assembly contains five wires. Typical wiring hookup is shown inFigure 2-1.No Connection White/Brown ShieldElectrical ConnectorView looking at connector pins. (Pins are also identified on connector).2.3 Lightning ProtectionA. Weather sensors are sensitive to direct or nearby lightning strikes. A well-grounded metal rod or frame should be placed above the sensor installation. Inaddition, the shield on the signal cable leading to the translator must beconnected to a good earth ground at the translator end and the cable routeshould not be vulnerable to lightning.3.0 OPERATIONAL CHECK-OUT AND CALIBRATION3.1 010C Wind Speed Sensor Check-OutA. Spinning the anemometer cup assembly will produce a series of pulses (40pulses per revolution). To verify sensor output, monitor this signal with either thetranslator module, data logger, or an oscilloscope. (Refer to Frequency vs. WindSpeed Table 3-1). Spinning the hub of the wind speed transmitter without thecup assembly mounted and allowing it to coast to a stop will give a goodindication of threshold performance; a jerky or sudden stop indicates damage tobearings, bent drive shaft, or obstruction in the light chopper.B. Inspect the cup assembly for loose cup arms or other damage. The cupassembly cannot change calibration unless a mechanical part has come loose orhas been broken. If a cup arm is loose or broken the calibration of the sensormay be affected.C. If the sensor heater is used, check internal heater operation by sliding sensorcover down and touching the housing behind the printed circuit board. Thehousing should feel warmer than the adjoining metal parts. The sensor has abuilt-in heater that is designed to provide a raise in the internal temperature,providing a small amount of positive pressure. This heater requires as external12 V (@500ma) power supply.FREQUENCY vs WIND SPEED FOR 010 SENSORTABLE 3-1Transfer FunctionsMiles per hour: Meters per second:rpm = 16.767 * (V mph - 0.6) rpm = 37.522 * (V m/s - 0.27) V mph = (rpm / 16.767) + 0.6 V m/s = (rpm / 37.522) + 0.27 f Hz = (V mph - 0.6) / .08946 f Hz = (V m/s - 0.27) / 0.039976 V mph = V m/s * 0.44704 V m/s = V mph / 0.447044.0 MAINTENANCE AND TROUBLESHOOTING4.1 General Maintenance Schedule*6 – 12 Month Intervals:A. Inspect sensor for proper operation per Section 4.2.B. Replace wind speed sensor bearings in extremely adverse environments perSection 4.5.12 – 24 Month Intervals:A. Recommended complete factory overhaul of sensor.*Schedule is based on average to adverse environments.Table 4-1010C Wind Speed Sensor TroubleshootingSymptom Probable Cause Solution Refer toNo wind speed output Loss of supplyvoltage Check translator +12supply & connectingcablesFigure 2-1Faulty integratedamplifierReplace circuit board Section 4.5Faulty diodes,D1, D2Replace circuit board Section 4.5Faulty detector Replace detector Section 4.6No wind speed outputbelow 2-5 mphBad bearing(s) Replace bearing(s) Section 4.4Faulty detector Replace detector Section 4.6Wind speed signal drops ouas speed increasesFaulty detector Replace detector Section 4.64.2 010C Wind Speed Sensor: 6 – 12 Month Periodic ServiceA. At the crossarm assembly, disconnect the quick disconnect plug from the sensor(leave the cable secured to the crossarm) and remove the sensor from thecrossarm assembly.B. Loosen the set screw holding the cup assembly. Support the rotating hub of thesensor with one hand and pull the anemometer cup assembly free.C. Visually inspect the anemometer cups for cracks and breaks. Also, make surethat each arm is securely attached to the cup assembly hub.D. Slide the sensor cover down to expose the light-chopper disc assembly, lightsource, detector, and circuit board.E. Inspect the interior of the sensor for any signs of corrosion and/or dust buildup.F. Inspect the light-chopper for cracks, and make sure that all slots are free ofcorrosion.G. Inspect the signal-conditioning module for cracks and corrosion around solderedconnections.H. Rotate the sensor hub assembly to ensure that it turns freely and that the sensorbearings are not damaged. Make sure the light-chopper assembly is notcontacting the light source and detector.I. Apply a small amount of silicone lubricant. (Dow-Corning DC-33 or equivalent) tothe sensor O-ring seals; slide the cover up over the sensor and wipe off anyexcess lubricant.J. A moisture vent is located on the base of the sensor; make sure that this vent is clear.K. Re-install sensor according to installation procedure (Section 2.0); verify proper operation using procedures in Section 3.0.4.3 010C Wind Speed Sensor Maintenance (Refer to 010C Sensor Assembly Drawing)The following procedures require a relatively clean, dry work area, a source of 12VDC power at approximately 20 mA, and an oscilloscope (DC to 10 KHz minimumrange required.4.4 Sensor Bearing Replacement. (Refer to 010C Sensor Assembly Drawing)A. Remove sensor from tower and remove cup assembly (1). Refer to Section 4.2.B. Disassemble sensor and remove old bearings (6).1. Slide the sensor cover (16) down to expose the light-chopper discassembly (10), detector assembly (12) and circuit board (18).2. Loosen both special set screws on the shaft of the light chopper assembly(11).3. Support the light-chopper assembly (10) with one hand and slowly pullthe rotating hub/shaft assembly (2) out of the column (8).4. Remove the shield (4) and slinger (5) from the column (8).5. Remove the light-chopper assembly (10) from the sensor housing, beingcareful not to damage the slots located between the light-chopper holderand the lower bearing.6. Insert the lower end of the rotating hub/shaft assembly into the upperbearing, cock it slightly to one side and push out the lower bearing.7. Insert a right-angle type of tool, such as an Allen wrench, into the upperbearing; cock it slightly to one side and remove the bearing.8. Clean dirt from bearing bores, using a cotton swab and alcohol.C. Install the new bearings and assemble the sensor.1. Install new upper and lower bearings in the column (8). Bearings shouldslide easily into bearing bores.2. Install a slinger and shield (4, 5) on the column assembly. Use new partsif old ones are damaged or corroded.3. Insert the rotating hub shaft (2) into the column assembly (8), through theshield (4), slinger, and upper bearing, until it starts to protrude through thelower bearing.4. Support the light-chopper assembly (10) with one hand and slowly pushthe rotating hub shaft into it until the shaft almost touches the bottom.5. Tighten both special set screws on the light-chopper assembly; do notover tighten as the set screw tips will damage the shaft.6. Rotate the sensor hub assembly (2) to ensure that it turns freely and thatan endplay of about .005” exis ts.7. Hold sensor vertically and make sure that the light-chopper assembly (10)is not contacting the detector assembly (12).8. Apply small amount of silicone lubricant (Dow-Corning DC-33 orequivalent) to the sensor O-rings (9); slide the cover (16) up over thesensor and wipe off any excess lubricant.D. Replace cup assembly and re-install (refer to Section 2.0)4.5 1200-1 Circuit Board Assembly Replacement (Refer to 010C Assembly Schematic)A. Remove sensor from tower and remove cup assembly (refer to Section 4.2).B. Slide the sensor cover (16) down to expose the light-chopper disc assembly (10),detector assembly (12), and circuit board (18).C. Remove two screws (17) holding circuit board assembly (18) and lift circuit boardaway from sensor housing.D. Note color of wires and then unsolder wires to detector assembly from circuitboard and three wires from connector (19).E. Install new circuit board assembly by reversing above procedure.4.6 Detector Assembly Replacement Refer to 010C Assembly Schematic)NOTE: 010C sensors SN M10560 and later use 520253 photodetector. Oldersensors use 1074 photodetector assemblies.A. Remove sensor from tower and remove cup assembly. Refer to Section 4.2.B. Slide the sensor cover (16) down to expose the light-chopper disc assembly (10),detector assembly (12) and circuit board (18).C. Remove two screws (17) holding circuit board assembly (18) and lift circuit boardaway from sensor housing.D. Note color of wires and then unsolder wires to detector assembly from circuitboard (18).E. Remove two screws (20) holding detector assembly (12) and remove assembly.F. Install new detector assembly by reversing above procedures.4.7 010C Wind Speed Sensor Repair and Recalibration ServiceThe factory provides fast, economical service for the user. This repair andcalibration service includes disassembly and detailed inspection of all movingmechanical parts and electronic components.Service includes replacement of bearings, regardless of apparent condition, andfunctional test of sensor. Replacement of the following items is also included: O-rings, shield and slinger, shaft, set screws. Other components will be replaced as required. Only charges for additional materials will be added to the basic service charge.Table 4-2Replacement 010C Parts ListRef No.U Description Part No.1 Cup Assembly Lexan - 2672Aluminum – 2672-1 2 Hub/Shaft Assy. 26584 Shield 10095 Slinger 10106 Bearing 10559 O-ring 72012010 Chopper Wheel Assembly 220211 Set Screw 60125012 Photo Detector 520253*13 Heater Clamp 48010014 Heater 80508016 Sensor Cover 267517 PCBA Mounting Screws 60124018 PCBA 1200-120 Detector Assembly Mounting Screws 60127022 Standoff 86005023 Integrated Amplifier 62030024 Nut, Hex, Kep 4-40 60040025 Screw FH 82︒ 4-40 x 3/8 60133026 Screw FH 82︒ 4-40 x ¼ 601240NOTE: 010C sensors SN M10560 and later use the black 520253 photodetector. Earlier sensors use the white 1074 photodetector assemblies.。
风力发电机的风速传感器说明书

风力发电机的风速传感器说明书感谢您购买我们的风力发电机风速传感器。
此说明书将为您提供有关传感器原理、安装及使用的详细信息。
在使用前,请仔细阅读本说明书。
若有任何疑问,请随时联系我们的技术支持部门。
一、传感器原理本传感器采用了先进的超声波技术来测量风速。
传感器内部的超声波发射器将信号发送到空气中。
超声波信号会撞击空气中的颗粒,并被反射回传感器内部的接收器。
通过测量超声波信号发送和接收之间的时间差,我们可以计算出空气中的风速。
二、安装为了确保传感器的测量结果准确,我们需要在安装传感器时注意以下事项:1.传感器应该安装在风力发电机的传动轴上方,并且距离传动轴至少50公分的位置。
这样可以避免传感器被风力发电机直接影响,从而影响测量结果。
2.传感器应该安装在离地面50公分的高度处,这样可以避免地面风向等因素对传感器的影响。
3.在安装传感器之前,请确保传感器配件齐备。
如有任何配件缺失或者损坏,请联系我们的客服部门。
三、使用本传感器具有自动校准功能,不需要手动校准。
在每次使用之前,请先进行一次预热。
预热时间约为30秒钟。
在使用时,请注意以下事项:1.传感器应该朝向风向。
如果传感器朝向错误,测量结果将会产生误差。
2.请勿将传感器安装在垂直风速较大的区域。
在一些气象条件下,会有上下行程的风,导致该区域的风速波动较大,从而影响测量结果。
3.传感器不能直接暴露在太阳下,必须加装遮阳罩,以确保测量结果的准确性。
四、维护本传感器无需特别维护。
如出现故障,请联系我们的客服部门进行维修。
五、注意事项1.请勿将传感器强行拆卸或修理。
如需进行维修,请联系我们的技术支持部门。
2.如使用过程中出现异常,请停止使用传感器并联系我们的客服部门。
3.请勿将传感器暴露在极端条件下。
如极端温度或湿度环境下使用传感器,可能会导致传感器出现故障。
希望本说明书可以为您的使用提供帮助。
如果您需要更多的技术支持或者有其他疑问,请联系我们的客服部门。
再次感谢您对我们的产品的信任和支持。
GFY15双向风速传感器说明书

(5) 复电点: 按遥控器面板上的“功能+”或“功能-”,使数码管显示“5 XXX”(出厂时设为 1.2),用户需要调整时,按“参数+”或“参数-”使数码管显示为用户要求值。
(7) 测试点: 测试功能主要是通过此功能检测其声光报警及输出是否正常。按遥控器面板上的 “功能+”或“功能-”使数码管显示“7 XXX”(0-15.0 可任意设置),用户需要调整时,按“参数+” 或“参数-”,使数码管显示为用户要求值。
注意:每次参数调整完毕后必须按“退出”键,以保证参数被有效的保存,如果没有按“退出” 键或其它键,30 秒后参数不保存自动退出到测量状态。 5 使用注意事项
上下左右晃动,距传感器 20m 范围内不能有遮挡物体存在,以免挡住风流,影响传感器的正常测量。
4.2 传感器接线
本传感器的外部接线采用航空插座方式,外配一个带航空插头的 1.5 米电缆线(型号 MHYVR-1×5× 7/0.3,外径约 8mm)。航空插头各引脚的定义及电缆芯线的对应关系如下:
1 号脚 -- 电缆红芯 --- 电源 + 2 号脚 -- 电缆白芯 --- 电源 3 号脚 -- 电缆蓝芯 --- 信号 + 4 号脚 -- 电缆绿芯 --- 信号 – 5 号脚 -- 电缆黄芯 --- NC(空) 4.3 传感器的使用
(4)传感器所接电缆要求:采用分布参数为(R≤12.8Ω/km、C≤0.06μF/km、L≤0.8mH/km)
的传输电缆时,传输距离不小于 2km。
11 附件及资料
PHWS系列风速传感器使用说明书

产品介绍PHWS风速传感器(变送器)采取传统三风杯风速传感器结构, 风杯选择碳纤维材料, 强度高, 开启好; 杯体内置信号处理单元能依据用户需求输出对应风速信号, 可广泛用于气象、海洋、环境、机场、港口、试验室、工农业及交通等领域。
技术参数测量范围: □ 0~45m/s□ 0~70m/s准确度: ±(0.3+0.03V)m/s(V:风速)分辨率: 0.1m/s开启风速: ≤0.3m/s供电方法: □DC 5V□DC 12V□DC 24V□其她输出形式: □脉冲: 脉冲信号□电流: 4~20mA□电压: 0~5V□电压: 0~2.5V□RS232□RS485□TTL信号□其她负载能力: 电流型输出阻抗≤600Ω电压型输出阻抗≥1KΩ工作环境: 温度-40℃~50℃湿度≤100%RH防护等级: IP45线缆等级: 额定电压: 300V 温度等级: 80℃产品重量: 130 g产品功耗: 50 mW计算公式脉冲型:W =0; (f = 0)W =0.3+0.0877×f(f≠ 0)(W: 风速示值(m/s); f: 脉冲信号频率)电流型(4~20mA):W = (i-4)×45/16(W: 风速示值(m/s); i: 电流信号(4-20mA))电压型(0~5V):W =V/5×45(W: 风速示值(m/s); V: 电压信号(4-20mA))接线方法传感器底部有一个5芯航空插头, 其针脚对应管脚定义如图所表示。
(1)若配置本企业生产气象站, 直接使用传感器线将传感器与气象站上对应接口相连即可。
(2)若单独购置变送器, 变送器配套线线序分别为:红色: 电源+黄色: 输出信号绿色: 电源—(3)脉冲电压、电流两种输出接线方法:(电压、脉冲方法接线)(电流输出方法接线)结构尺寸风速传感器底座安装尺寸图:安装孔径: 4mm分布直径: 62.5mm航插直径: 15mm(提议预留25mm便于布线)注意事项1、请检验包装是否完好, 并查对产品型号是否与选型一致;2、切勿带电接线, 接线完成检验无误后方可通电;3、使用时不要随意改动产品出厂时已焊接好元器件或导线;4、传感器属于精密器件, 用户在使用时请不要自行拆卸、用尖锐物品或腐蚀性液体接触传感器表面, 以免损坏产品;5、请保留好检定证书和合格证, 维修时随同产品一同返回。
测试科技 010C 风速传感器和 020C 风向传感器产品说明书

The 010C Wind Speed Sensor provides accurate and detailed information on horizontal wind speed. The lightweight three-cup anemometer is used in virtually all applications where fast response and low starting threshold(s) are of paramount importance.The 020C Wind Direction Sensor provides azimuth data for use in micrometeorological measurements related to operational studies and research. The lightweight airfoil vane is directly coupled to a single precision potentiometer. These sensors are especially useful when a low starting threshold, a high damping ratio, or a short delay distance is required.Both wind speed and wind direction sensors are used inenvironments ranging from Antarctic cold to arid desert heat. The 01OC, 010C-1, and 020C instruments meet U.S. EPA and NRC performance specifications for critical regulatory, research or scientific measurement applications.ReliabilityThe 010C and 020C are made of stainless steel and anodized aluminum components and are functionally more reliable than any other sensors of their kind:• Built-in electrical field surge protection greatly reduces problems associated with static fields, near-miss lightning hits and poor grounding systems• Inclusion of Met One Instruments’ internal heater (AC use only) provides positive clean aspiration through the bearings, thereby greatly increasing sensor bearing life• Optional, external de-icing heater sleeve for applicationswhere freezing rain, ice and low wind speeds may be encounteredFeatures• Low starting threshold• Internal heater for long bearing life• Low profile to minimize “sensor turbulence”• High damping ratio • Short delay distance• Quick-disconnect connector• Field-replaceable electronic components • Ingress Protection Level 65 (IP65)010C Wind Speed Sensor020C Wind Direction SensorCable Assembly; specify length in feet or meters PN 191 Crossarm AssemblyCable Assembly; specify length in feet or meters PN 191 Crossarm Assembly15 ft. (4.6 m) aluminum cup assembly (meets EPA specifications) 0.25 (aluminum tail)Cable & MountingPN 1953Mounting:Cable & MountingPN 1957Mounting:Alternate Wind Sensors010C-1Distance Constant: 020C-1Damping Ratio:Specifications are subject to change at any time.020C Wind Directon Sensor Specifications0-135mph (0-60m/s)0.5 mph (0.22 m/s) 0 -l/0 mph (0 -50 m/s)±1% or 0.15 mph (0.07 m/s) Resolution <0.1 mph or m/s-50°C to +65°C (-58°F to +149°F)less than 5 It (1.5m) of flow (meets EPA specifications)Electrical 0° -357° Mechanical 0° -360° 0.5 mph (0.22 m/s) ±1/2% of full scale ±3°Resolution <0.1 °Standard 0.6 (magnesium tail) (meets EPA specifications) Less than 3 It (91 cm)-50°C to +65°C (-58°F to +149°F1.5 Ibs (.68 kg)Clear anodized aluminum; Lexan cup assembly1.5 Ibs (.68 kg)Clear anodized aluminum12 VDC at 10 mA, 12 VDC at 350 mA for internal heater 11 volt (pulse frequency equivalent to speed) 100 Ω maximum12 VDC at 10 mA, 12 VDC at 350 mA for internal heater a. 0 -5 V for 0° -360° b. 0 -2.5 V for 0° -360° 100 Ω maximum Performance CharacteristicsMaximum Operating Range: Starting Speed: Calibrated Range: Accuracy:Temperature Range: Distance Constant:Performance CharacteristicsAzimuth:Threshold: Linearity: Accuracy:Damping Ratio: Delay Distance: Temperature Range:Physical CharacteristicsWeight: Finish:Physical CharacteristicsWeight: Finish:Electrical CharacteristicsPower Requirements: Output Signal:Output Impedance:Electrical CharacteristicsPower ReqUirements: Output Signal: Output Impedance:010C Wind Speed Sensor REV JULY 20181600 Washington Blvd. • Grants Pass, Oregon 97526 • 541.471.7111 • Technical Drawings020C Wind Direction Sensor191-1 Mounting Arm & 010C-020C010C Wind Speed SensorREV MAR. 20181.05 (27 mm) DSHOWN WITH 5315 ICE SKIRT (Optional)MS CONNECTOR1553 MOUNTING ADAPTER 1686 ALIGNMENT ADAPTER1552 MOUNTING ADAPTERDIAMETER TO FIT3/4” IPS PIPE1552 MOUNTINGADAPTER3/4” IPS PIPE 1” DIAMETER191-1 CROSS ARM ASSEMBLYCABLE 19571.05 (27 mm)SHOWN WITH 5315 ICE SKIRT (Optional)CABLE 1953DIAMETER8.00” (203 mm)60.00” (1524 mm)16.92” (430 m m )16.92” (430 m m )C LC L。
风速传感器使用说明书

最高位,检查最低位;
4、如果最低位为 0:重复第 3 步(再次移位) 如 果 最 低 位 为 1 : CRC 寄 存 器 与 多 项 式 A001(1010 0000 0000 0001)进行异或;
5、重复步骤 3 和 4,直到右移 8 次,这样整个 8 位数据全部进行了处理;
L:风速测量范围(m/s))
电压型(0-2.5V):
W =V/2.5×L
(W:风速示值(m/s);V:电压信号(0-2.5V);
L:风速测量范围(m/s))
接线方法
传感器底部有一个 5 芯航空插头,其针脚对应 的管脚定义如图所示。
(1)若配备本公司生产的气象站,直接使用传感 器线将传感器与气象站上的相应接口相连即 可。
大树枝可折断。
树木可被吹倒,一般建筑物遭 10 狂风
破坏
大树可被吹倒,一般建筑物遭 11 暴风
严重破坏
13.9~17.l 17.2~20.7 20.8~24.4 24.5~28.4 28.5~32.6
12 飓风 陆上绝少,其催毁力极大
>32.6
4
5.5~7.9
清劲 有叶的小树摇摆,内陆的水面 5
风 有小波,高的草波浪起伏明显
8.0~10.7
大树枝摇动,电线呼呼有声,
6 强风
10.8~13.8
撑伞困难,高的草不时倾伏于地
全树摇动,大树枝弯下来,迎 7 疾风
风步行感觉不便
可折毁小树枝,人迎风前行感
8 大风
觉阻力很大
草房遭受破坏,屋瓦被掀起, 9 烈风
2
49 m m
风速传感器 V1.0 TR-FS02
Vaisala WMT700系列风速传感器用户指南说明书
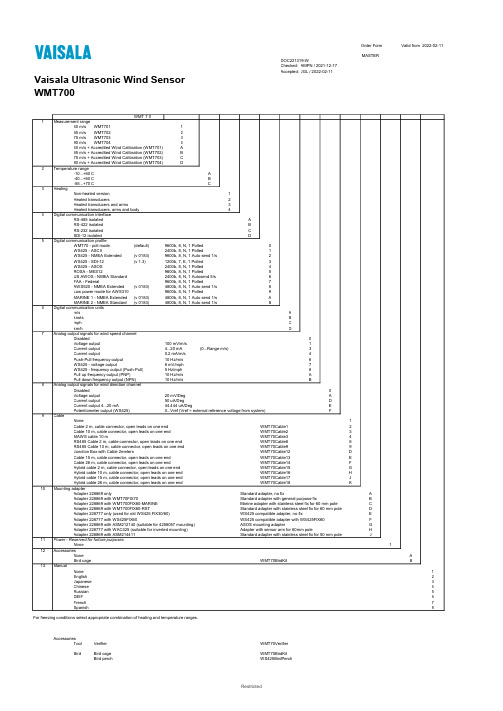
Order Form Valid from2022-02-11MASTERDOC221319-WChecked: AMPN / 2021-12-17Accepted: JGL / 2022-02-11Vaisala Ultrasonic Wind SensorWMT700WMT 7 01Measurement range40 m/s WMT701165 m/s WMT702275 m/s WMT703390 m/s WMT704440 m/s + Accredited Wind Calibration (WMT701)A65 m/s + Accredited Wind Calibration (WMT702)B75 m/s + Accredited Wind Calibration (WMT703)C90 m/s + Accredited Wind Calibration (WMT704)D2Temperature range-10...+60 C A-40...+60 C B-55...+70 C C3HeatingNon-heated version1Heated transducers2Heated transducers and arms3Heated transducers, arms and body44Digital communication interfaceRS-485 isolated ARS-422 isolated BRS-232 isolated CSDI-12 isolated D5Digital communication profileWMT70 - poll mode (default)9600b, 8, N, 1 Polled0WS425 - ASCII 2400b, 8, N, 1 Polled1WS425 - NMEA Extended(v 0183)9600b, 8, N, 1 Auto send 1/s2WS425 - SDI-12 (v 1.3)1200b, 7, E, 1 Polled3WS425 - ASOS 2400b, 8, N, 1 Polled4ROSA - MES12 9600b, 8, N, 1 Polled5US AWOS - NMEA Standard2400b, 8, N, 1 Autosend 5/s6FAA - Federal9600b, 8, N, 1 Polled7AWS520 - NMEA Extended(v 0183)4800b, 8, N, 1 Auto send 1/s8Low power mode for AWS3109600b, 8, N, 1 Polled9MARINE 1 - NMEA Extended(v 0183)4800b, 8, N, 1 Auto send 1/s AMARINE 2 - NMEA Standard(v 0183)4800b, 8, N, 1 Auto send 1/s B6Digital communication unitsm/s Aknots Bmph Ckm/h D7Analog output signals for wind speed channelDisabled0Voltage output100 mV/m/s1Current output 4...20 mA(0...Range m/s)3Current output0.2 mA/m/s4Push-Pull frequency output10 Hz/m/s6WS425 - voltage output8 mV/mph7WS425 - frequency output (Push-Pull) 5 Hz/mph8Pull up frequency output (PNP)10 Hz/m/s APull down frequency output (NPN)10 Hz/m/s B8Analog output signals for wind direction channelDisabled0Voltage output20 mV/Deg ACurrent output50 uA/Deg DCurrent output 4...20 mA44.444 uA/Deg EPotentiometer output (WS425)0...Vref (Vref = external reference voltage from system)F9CableNone1Cable 2 m, cable connector, open leads on one end WMT70Cable12Cable 10 m, cable connector, open leads on one end WMT70Cable23MAWS cable 10 m WMT70Cable34RS485 Cable 2 m, cable connector, open leads on one end WMT70Cable88RS485 Cable 10 m, cable connector, open leads on one end WMT70Cable99Junction Box with Cable 2meters WMT70Cable12DCable 15 m, cable connector, open leads on one end WMT70Cable13ECable 26 m, cable connector, open leads on one end WMT70Cable14FHybrid cable 2 m, cable connector, open leads on one end WMT70Cable15GHybrid cable 10 m, cable connector, open leads on one end WMT70Cable16HHybrid cable 15 m, cable connector, open leads on one end WMT70Cable17JHybrid cable 26 m, cable connector, open leads on one end WMT70Cable18K 10Mounting adapterAdapter 228869 only Standard adapter, no fix AAdapter 228869 with WMT70FIX70Standard adapter with general purpose fix BAdapter 228869 with WMT700FIX60-MARINE Marine adapter with stainless steel fix for 60 mm pole CAdapter 228869 with WMT700FIX60-RST Standard adapter with stainless steel fix for 60 mm pole DAdapter 228777 only (used for old WS425 FIX30/60)WS425 compatible adapter, no fix EAdapter 228777 with WS425FIX60WS425 compatible adapter with WS425FIX60FAdapter 228869 with ASM212140 (suitable for 4258057 mounting)ASOS mounting adapter GAdapter 228777 with WAC425 (suitable for inverted mounting)Adapter with sensor arm for 60mm pole HAdapter 228869 with ASM214411Standard adapter with stainless steel fix for 50 mm pole J 11Power - Reserved for furture purposesNone1 12AccessoriesNone ABird cage WMT70BirdKit B 13ManualNone1English2Japanese3Chinese4Russian5DEIF6French7Spanish8For freezing conditions select appropriate combination of heating and temperature ranges.AccessoriesTool Verifier WMT70VerifierBird Bird cage WMT70BirdKitBird perch WS425BirdPerchCable Cable 2 m, cable connector, open leads on one end227567SP Cable 10 m, cable connector, open leads on one end227568SPCable 15 m, cable connector, open leads on one end237890SPCable 26 m, cable connector, open leads on one end237889SPRS485 Cable 2 m, cable connector, open leads on one end228259SPRS485 Cable 10 m, cable connector, open leads on one end228260SPMAWS cable 10 m227565SPROSA analog cable 10 m, cable connector, open leads on one end231425SPAdapter cable for WS425 serial227569SPAdapter cable for WS425 analog frequency output227570SPJunction Box with Cable 2meters ASM210719SPWMT700 USB service cable240855Universal USB service cable with screw terminal for RS485 or RS232240884Hybrid cable 2 m, cable connector, open leads on one end CBL210706-2MSPHybrid cable 10 m, cable connector, open leads on one end CBL210706-10MSPHybrid cable 15 m, cable connector, open leads on one end CBL210706-15MSPHybrid cable 26 m, cable connector, open leads on one end CBL210706-26MSP Mounting WMT700 Mounting Accessories:Adapter for FIX70228869Fix70 (suitable also for inverted mounting)WMT70FixSPMounting adapter 60mm POM WMT700FIX60-POMSP Mounting adapter 60mm RST WMT700FIX60-RSTSP Cross-arm (40x40x850mm)WMT70CROSSARMMounting adapter between 228869 and 4258057ASM212140Mounting adapter 50mm RST ASM214411WS425 Mounting Accessories:Adapter for old WS425 FIX30/60228777FIX30WS425Fix30FIX60WS425Fix60Sensor support arm for 60mm pole (655mm with integrated fix for item 228777)WAC425Power Outdoor AC (mains) power supply for arm heated and fully heated WMT700PJB480Display Wind display XDi-N 144 (5’’ display) for ship navigation252307 Wind display XDi-N 192 (7’ display) for ship navigation252321。
风速传感器 说明书
一、产品概述 (2)二、应用范围 (2)三、技术参数 (2)四、功能特点 (4)五、结构尺寸图 (4)六、固定方式 (4)七、信号输出定义 (4)八、线色定义 (5)九、脉冲型风速输出电路图 (5)十、脉冲输出型计算 (6)十一、RS485/232通讯协议 (6)十二、风力等级划分表 (10)十三、风速与输出信号对应表 (11)一、产品概述该三杯式风速传感器是我公司自主研发、生产的一款风速测量仪器,本品由壳体、风杯和电路模块组成,内部集成光电转换机构、工业微电脑处理器、标准电流发生器、电流驱动器等。
传感器壳体和风杯采用铝合金材料,使用特种模具精密压铸工艺,尺寸公差甚小表面精度甚高,内部电路均经过防护处理,整个传感器具有很高的强度、耐候性、防腐蚀和防水性。
电缆接插件为军工插头,具有良好的防腐、防侵蚀性能,能够保证仪器长期使用,同时配合使用风速传感器内部进口轴承系统说明书,确保了风速采集的精确性。
电路PCB采用军工级A级材料,确保了参数的稳定和电气性能的品质;电子元件均采用进口工业级芯片,使得整体具有极可靠的抗电磁干扰能力,能保证主机在-20℃~+50℃,湿度35%~85%(不结露)范围内均能正常工作。
二、应用范围本产品可广泛运用于工程机械(起重机、履带吊、门吊、塔吊等)领域,铁路、港口、码头、电厂、气象、索道、环境、温室、养殖、空气调节、节能监控、农业、医疗、洁净空间等领域风速的测量,并输出相应的信号。
三、技术参数□脉冲输出型:□ NPN输出□ PNP输出□ NPN输出带内部上拉(4.7KΩ)□RS485通讯型□电压输出型:□ 0-2VDC □ 0-5VDC □ 0-10VDC □电流输出型: 4-20mA电源:根据输出类型不同所需的电压源范围不同电流输出型: 12~24V电压输出型:输出0-2VDC:6~24V输出0-5VDC:6~24V输出0-10VDC:12~24V脉冲输出型:5~24V量程:□0-30m/s □0-60m/s负载能力: □其他□<500Ω□>2kΩ最大功耗(DC24V): 脉冲型MAX≤200mW;电压型MAX≤300mW;电流型MAX≤700mW;启动风力:0.4~0.8m/s 重量:≤0.5Kg四、功能特点该产品自投入市场以来,以其优异的质量,卓越的性能赢得广大用户的好评,具备以下特点:◆外观结构设计合理、美观大方,体积小,便于携带,安装简便。
GFW15矿用风速传感器使用说明书

GFW15矿用风速传感器执行标准:Q/SDBA003-2012GB3836-2010使用说明书山东三大博安测控技术有限公司20201212年7月目录一、概述 (1)二、主要技术参数 (2)三、传感器工作原理简介 (3)四、安装方法 (4)五、使用操作 (5)六、维护和修理 (8)七、运输与贮存 (8)八、故障分析与排除 (9)九、随机配件 (10)一、概述GFW15矿用风速传感器是依据MT448-2008《矿用风速传感器》和GB3836.4-2010《爆炸性环境第4部分:由本质安全型“i”保护的设备》的标准制造,符合Q/SDBA003-2012产品标准,防爆标志为ExibI(矿用本质安全型)。
本产品主要用于煤矿井下各种坑道、风口、扇风机井口等处风速的检测,以确保煤矿的安全生产。
传感器为本质安全型,是一种智能型检测仪表,环境适应性强,安装调试方便,经国家防爆检验机关进行联机检验后,可与国内各类煤矿监测监控系统配套使用。
1、使用环境条件a)工作环境温度:0~40℃b)相对湿度:≤98%c)大气压力:80~110Kpad)机械环境:无显著振动和冲击的场合;e)煤矿井下有甲烷及煤尘爆炸性混合物,且无破坏绝缘的腐蚀性气体的场合。
2、型号命名G F W15测量范围超声波漩涡式风速传感器3、电缆参数电缆型号:MHYV1×4×7/0.52参数:电阻≤12.8Ω/km,电容≤0.06μF/km,电感≤0.8mH/km4、防爆形式及标志本产品防爆型式为矿用本质安全型,防爆标志为ExibI。
5、外形尺寸及重量外形尺寸(长×宽×高):307mm×131mm×82mm(如图1所示);质量:1.1kg±0.1kg图1:传感器外形尺寸二、主要技术参数1、工作电压:21.5V,波动范围12V~24V(DC)2、工作电流:≤50mA3、测量范围:风速0.4~15m/s4、允许误差:≤±0.3m/s5、重复性误差:显示数值X±1%6、输出方式:频率信号输出,200Hz~1000Hz7、传输距离:传感器使用电缆标称截面积为1.5mm 2时,传感器与关联设备的传输距离2km8、遥控器:普通1.5V 五号干电池2节遥控范围3m9、防爆形式:ExibI (矿用本质安全型)10、本安参数:Ui :21.5V I i :50mA Ci :0μF Li :0mH11、防护等级:IP54三、传感器工作原理简介根据卡曼涡街理论,在无限界流场中,垂直于流向插入一根非流线形阻力体(即旋涡发生体)。
GFW15矿用风速传感器说明书
(1) 上电后,用示波器测量线路板插脚的 TD1 端子,调节 W301 使得测量的波形如图 9
所示,频率为 147.8KHZ 左右;
图9
(2) 用示波器测量 VD302 的正极,调节 W302 使得测量的波形为标准的正弦波,且幅度 值为最大。
● 恢复默认参数状态 在仪器调节错乱不易进行调节情况下,可按遥控器“功能”键使仪器显示“q ”,
2.7 最大传输距离:传感器到分站的最大传输距离:2km(使用 MHYVRP 电缆,导体截
面积 1.5mm2, 分布电感<0.8mH/km,分布电容<0.06μF/km,电阻<12.8Ω/km)mA
2.9 防爆类型
防爆型式:矿用本质安全型
徐州江煤科技有限公司
3、调试方法
● 软件调节 (1) 调灵敏度
此项一定要在线性调节之前完成,将仪器按正确位置放入标准风洞内,将风洞内风速 调节至 6.0 m/s,按遥控器“功能”键使仪器显示“J×.×.”,再按遥控器“增加”或“减 小”键,使仪器显示“J6.0.”,此时按遥控器“确定”键,灵敏度调节完毕。 (2) 线性调节
GFW15 矿用风速传感器
使用说明书
执行标准:GB3836-2000、MT448-2008、Q/JMKJ1035-2010
徐州江煤科技有限公司
二○一○年二月
GFW15 矿用风速传感器使用说明书
*安装、使用产品前,请仔细阅读产品使用说明书*,谢谢! 警告!
严禁在井下带电开盖! 维修时不得改变本安电路和与本安电路有关的元、器件的电气参数、规格和型号! 本产品不得随意与其它未经联检的设备连接!
调节完灵敏度后, a) 在风洞内风速调节至 9.0 m/s 时,按遥控器“功能”键使仪器显示“××.×.”(注
GFW风速传感器使用说明书-精选文档
机械损伤,提高整机的密封性,延长了仪器使用寿命。咨询:四零零零八六零五三七
*稳定性好:本仪器根据卡曼涡街理论测量的风速稳定可靠。 *兼容性好:本仪器可由红外遥控器灵活设置多种输出信号制式,几乎可以与国内所有类型的分站连接。
*外观精巧、结构简单:本仪器电路板采用贴片式焊接,外观轻巧美观,结构精致合理,密封性极好,便于安装
用时只要把传感器的电缆与系统的电源联上即可。
2、安装 实际使用前,一般可进行简单测试。本机出厂时已设置好参数,接线完成后,即可通电。在无风状态,风速显 示为零,然后对准探头进风口吹风,本机即刻显示一定风速。 安装时,把传感器牢固地安装在测量位置,不 能晃动,注意探头进风方向,有三角柱体侧为进风口。接入电源及输出线,即传感器电缆。
接收电路;数据存储电路等组成。 电源电路:
稳压电路由稳压器M1、二极管VD001、电容C000~C003、C307~C309等组成。外接本安电源经稳压后
,给各电路供电5V,D102为电源反相集成块7660,将+5V电压反相输出-5V电压供精密运算放大器D302使 用。
GFW风速传感器结构特征与工作原理
GFW风速传感器结构及原理
超声波调制原理: 根据卡曼涡节理论,在无限界流场中垂直插入一根无限长的非线性阻力体(漩涡发生体)时,则在一定的 雷诺数范围内(RED=200~50000),阻力体下游会产生两排交替的、内旋的漩涡列,而其漩涡率正比于流速 。 微处理电路: 此电路由集成微机芯片(单片机)D101及晶振JZ1、电容C101、C102组成。它完成数据的采集、运算、 处理、控制、输出等功能。
GFW风速传感器概述
GFW风速传感器产品特点
*微电脑处理芯片:采用新型单片微机和高集成数字化电路,使电路结构简单、性能可靠,便于维修调试。 *灵敏度高:高性能的传感器元件加上仪器内部软件的自动非线性补偿使得仪器对风速的检测具有较高的灵敏度
OMC-160 风速传感器安装和技术使用说明书

OMC-160 Anemometer Meteorological Applications Installation & technical user manualVersion 2.04TDC 28-11-2013Version history2.04 28-11-2013 Corrected part number of Wind vane (page 11)TABLE OF CONTENTS1. GENERAL (5)1.1D ATA SUMMARY (6)2. INSTALLATION (7)2.1M ECHANICAL (7)2.2E LECTRICAL (7)3. COMMISSIONING (8)3.1A LIGN PROCEDURE (8)4. SENSOR BODY (9)4.1M AINTENANCE (10)4.2S PARE PARTS (11)5. THE OUTPUT OF THE OMC-160 (12)5.1OMC-160 FORMAT (12)5.2NMEA (12)6. INTERNAL WIRING (13)7. CONNECTIONS (14)7.1J UMPER FUNCTION CONNECTION 13&14 (14)8. DIMENSIONS (15)9. DECLARATION OF CONFORMITY (16)Page intentionally left blank1. GeneralThe wind sensor combination OMC-160 consists of the wind speed sensor and wind direction sensor. The system is robust, lightweight, corrosion resistive and easy to install.The wind sensor is a rotary-cup type unit made from stainless steel. The 3 cups are helicoid shaped, 80 mm in diameter, with an outer spin diameter of 130 mm. Rotation of the cup-unit generates 8 pulses/rotation in an optical encoder. The encoder is directly connected to the micro processor which converts the pulses to wind speed in M/S.The wind direction sensor is a wind vane type unit, made from stainless steel. The wind vane drives a resolver, from which the reference coils are connected to the microprocessor. The micro processor translates the sine and cosine output from the resolver into a direction signal.The microprocessor transmitter is completely encapsulated to withstand extreme environmental conditions. It converts both the optical pulses from the wind speed and the resolver position from the wind direction, into a combined digital signal (serial current loop, 300 bps, ASCII code). This signal can be transmitted over cable lengths up to 1200 meters, but it can also be transmitted via VHF or other data-communication systems. The transmitter unit requires a 8- 30 volts dc supply, which is usually supplied by the indicator coupled to the wind sensor (typically 15Vdc).De-icing heatersAs an option, the wind sensors may be equipped with de-icing heaters. These heaters are located in the top part of the sensors. By heating the bearing-housing, it prevents the rotating parts freezing to the housing in case of precipitation at low temperatures. The heaters (24 Volts ac or dc, 35 Watt) are controlled by a thermostat in the sensor housing.1.1 Data summaryPower supply: 8 TO 30 VDC 60 mAOutput: Currentloop ASCII coded output 20 mA2.30NMEA-0183versionkgWeight: 6.5Dimensions: 865x248x465mm (DxWxH) see sketch chapter 8 Mounting pole: max. 65 mm diaOperating temperature: –25 to 70°CMoisture protection: IP65Humidity: 10 to 95%Accuracy: Wind speed: better than 2% FROWind direction: better than 3 degreesSpeed range: 0,3…75 m/sClass: EMC EN 50081-1 class B, EN 50082-2Conform RoHS directive 2002/95/EC en 2005/18/EC2. Installation2.1 MechanicalThe wind sensor OMC-160 is supplied with the mounting bracket and junction box. This can be mounted on a vertical pipe with external diameters between 35-60 mm using the U-bolt clamps supplied.Before starting the installation, make sure that all components are complete, and that the mast is properly fixed to withstand rugged wind forces. The wind-sensors are usually shipped with the wind vane and cups disconnected from their appropriate units. On the common unit, the upper spindle is for the wind direction sensor, and the lower spindle for the wind speed sensor. To prevent damaging the wind vane and cups, properly mount thesensor/bracket combination on the mast before fitting the wind vane and cup-unit. (this may not always possible)Ensure that the sensors are mounted high enough to avoid any turbulence from obstacles. For guidance refer to the WMO publication ’Guide to Meteorological Instruments and Methods of Observation’ (latest issue).On completion of the above installation carry out the setting-up procedure as contained in the commissioning paragraph 3.1.2.2 ElectricalThe mounting bracket is provided witha junction box for connection of the fieldcabling. The combined wind sensor onlyrequires a 4-core cable (2 twisted pairs, 0.75mm2, common screen). In case that thesensors are equipped with de-icing heater, a6-core cable is required with 2 extra coresfor the heather.Because the current drawn by the heateris ±2 amp the cable from the sensor to thejunction box should be as short as possibleto prevent loss of power. For the cable fromthe junction box to the heater transformer thecable size depends on the length of thatcable.The field cable should be properlysupported, and fastened to prevent exertingforce on the terminals. The common screenof the cable must be grounded to earth onone end only, inside the junction box of thewind sensor.3. CommissioningBefore commissioning the wind sensor, check that the display is properly connected and the power is switched on. The display normally provides the 15 volts dc power supplyto the wind sensor, which can be measured between terminals (1) and (2) at the rear of the display. The wind speed sensor needs no further commissioning, it will automatically transmit the measured speed.3.1 Align procedureLand-based:The wind direction sensor needs alignment. In land based systems the OMC-160 shouldbe aligned to North. After alignment the OMC-160 wind sensor will report "absolute" wind direction. This way of alignment is also used on most fixed offshore rigs.Ship-based:On ship based systems the OMC-160 should be aligned to the bow of the vessel. After alignment the OMC-160 will report "relative" wind direction. This way of alignment is also used on small buoys and on some offshore objects as F(P)SO’s.For the purpose of alignment the sensor is provided with an LED located in the junction box mounted on the mounting bracket which will light-up when the sensor transmits a direction signal around zero degrees (between 350 and 010 degrees):1. Open the cover of the junction box that is located on the mounting bracket toobserve the LED.2. When the color of the LED is green the sensor transmits a direction between002 to 010 degrees.3. When the color of the LED is red the sensor transmits a direction between the350 an the 358.4. When the color of the LED turns yellow the transmitted signal is "North" or 0degrees, within a band width of 2 degrees.5. For land based alignment locate North by using a hand held compass or similar.6. Unscrew the locknut of the wind vane7. Put a screwdriver in the groove of the vane-shaft and set the counterweight ofthe wind vane pointing to North or the ships bow, and keeping it in thisposition, slowly turn the shaft with the screwdriver until the LED lights up.8. Fine adjust the shaft until the LED lits yellow (i.e. North or 0 degrees within 2degrees)9. Tighten the lock-nut of the wind vane, taking care that the vane does not move onthe shaft.10. Check the "North" transmitting signal with LED after tightening the vane locknut.11. Close the junction box cover.Remark:Depending on local circumstances, it may be more practical to align the wind vane with the sensor mounting bracket and adjust the wind vane shaft until the LED light. The mounting bracket can then be aligned to the north by rotating the complete mast, thus aligning the wind vane to the North.4. Sensor body4.1 MaintenanceThe OMC-series wind sensors are designedfor low maintenance and all components are conservatively rated. The only componentsthat are likely to require replacement due to normal wear are the precision ball bearings. Replacement of these components should only be attempted by a qualified technician. Itshould be carried out in a workshop free fromdirt and impurities.Refer to assembly drawings of wind speedand, wind direction sensor for part names and locations. First remove the cup-unit or vane-unit from the body by unscrewing the locknutand lifting the unit. To gain access to the bearings remove the bearing housing by unscrewing the 3 screws on the side of the body. When lifting the bearing housing, the attached transmitter block in the speed sensor,or the resolver in the direction sensor will alsobe pulled out with the attached wiring. Before disconnecting this wiring mark the original connections.In the wind speed sensor the transmitter block must be removed after which the columns can bescrewed off to free the bearing lock plate. The bearings can now be taken out complete with the shaft. In the wind direction sensor this is done in a similar way after removing the resolver.When the bearings are renewed, care should be taken not to apply excessive force on the new bearings.The bearing housings of wind speed and wind direction units are not identical on the OMC-160.When re-installing the complete bearing housing with the transmitter block or resolver, care should be taken that the internal wiring is properly connected, and not touching any moving part.The cable-gland in the bottom part of the body should be tightened to support the field cable.Parts with positioning numbers as used in the drawings on the previous pages.Pos Nr. Description Pos Nr. Description 18 2Ball bearing383Distance column19 2 Ball bearing 39 6 Hexagonal screw 20 2 Axis40 2 Lockingscrew 21 1 Bearing wind direction 41 2 Circlip washer 22 1 Center bus 42 1 Circlip washer23 1 Carrier fork 43 6 Countersunk head screw 24 1 Carrier pin plate 44 1 O-ring 25 1 Mounting plate resolver 45 2 Circlip washer 26 1Distance tube resolver462Spring washer27 3 Bolt 47 2 Cap nut 28 1Resolver29 2 Screw 14 1 Cable gland 30 1Transmitter block15131 1 Bearinghouse wind speed 16 32 1Locking plate331 Pulse code cap4.2 Spare partsPart : Part No.Cup assembly : OMC-9166 Fin assembly : OMC-9165 Transmitter block : OMC-9161 Ball bearing set : OMC-9169Retaining ring Diameter. 10 x 1 mm and 8 x 1 mm included in bearing set.5. The output of the OMC-1605.1 OMC-160 formatJumper on terminal 13 & 14 sets the sensor to OMC-160 ouput:The output of a OMC-160 wind sensor is a current loop signal with ASCII information.The format of this message is:The checksum is all information in the string added, the least significant byte is divided into high and low nibble and both nibbles are incremented by hexadecimal 30. This information is sent out as a checksum.Data protocol,Baud rate = 300 Parity = noneWord length = 8 Stop bit = 15.2 NMEAJumper removed from terminal 13 & 14 will set the output to NMEA 4800 baud (On request this can be set to 9600 Baud).$IIMWV,xxx.x,R,xxx.x,M,A*xx(CR)(LF)$IIMWV, ID : II, MWV message typedirectionxxx.x, WindR, Relativespeedxxx.x, WindM, m/svalue,V= invalid value=validA, A* Check sum identifierxx Check sum (high byte first)ReturnCR CarriageFeedLF Line6. Internal wiringShould for some reason the sensor not be electrically connected to the mounting bracket junction box, access must be gained to the interior of the sensor to enable connection of the field cabling. Remove the bearing-assembly from the sensor body by unscrewing the three screws on the side of the body, and lift the bearing-assembly. In the wind speed sensor the transmitter block is fitted to the bearing housing, and in the wind direction sensor the resolver is fitted to the bearing housing. From the wind direction resolver six signal cores are connected to the transmitter block in the wind speed sensor. The combined output signal is available on 14 screw terminals on the transmitter block. Field cabling can be connected either directly to the transmitter block terminals inside the speed sensor, or via a junction box on the mounting bracket. (see internal wiring diagram)7.1 Jumper function connection 13 & 14In the junction box of the OMC-160 a jumper can be found on terminal 13 & 14. It is possible to set different output types with this jumper. The available settings are:Jumper in place:∙Baud rate 300 baud∙OMC-160 format on terminal 3 & 4 Currentloop∙OMC-160 format on terminal 1 & 9 RS232∙Jumper removed:∙Baud rate 4800 baud∙NMEA format on terminal 3 & 4 Currentloop∙NMEA format on terminal 9 & 10 RS4229. Declaration of Conformity。
F6100系列风速传感器产品说明书
风速传感器(型号:F6100)使用说明书版本号:1.0实施日期:2017.09.20郑州炜盛电子科技有限公司Zhengzhou Winsen Electronic Technology Co.,Ltd声明本说明书版权属郑州炜盛电子科技有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用本公司的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您没有依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
郑州炜盛电子科技有限公司F6100系列风速传感器产品简介F6100是炜盛科技基于热线技术开发的一款风速传感器。
该传感器利用量热原理,具有体积小,重量轻,响应快等特点。
该传感器不含可动部件,惯性极小,特别对于极微小的风速具有良好的响应,适用于微风段的测量。
F6100风速传感器采用模拟电压输出方式,仅有3支引脚,小巧轻便,易于组装,有利于客户快速部署应用。
性能参数产品型号F6100量程①0.5、1、2、3、5、10m/s最小典型值最大单位满量程输出② 4.30 4.50 4.70V零流量输出②0.30.500.70V输出阻抗-200-Ω工作电压 5.0512.0V工作电流8090140mA分辨率③-±5±10‰F.S反应时间0.13S工作温度-25-65℃储存温度-40-90℃管脚功能1VCC 2GND 3OUT图1:传感器尺寸图产品特点温漂低稳定可靠超快响应高灵敏度抗电磁干扰应用场所便携仪器管路检测医疗卫生现场控制新风系统1提供0-100m/s之间任意量程,0.5、1、2、3、5、10m/s为常规量程,其他量程收定制费。
风速仪操作说明书
风速仪操作说明书本操作说明书适用于风速仪的正确操作和使用方法,请仔细阅读并按照说明逐步操作。
一、产品概述风速仪是一种用于测量风速的便携式仪器。
它可广泛应用于气象观测、环境监测、风能评估等领域。
本风速仪采用先进的传感器技术和数字显示屏,具有测量准确、操作简单、便携轻巧等特点。
二、产品组成1. 主机:包含显示屏、按键等控制元件,用于显示和设置相关参数。
2. 风速传感器:测量空气流动引起的风速,并将数据传输给主机。
三、操作步骤1. 打开风速仪电源在使用前,确保风速仪已安装好电池并连接好传感器。
按下主机上的电源按钮,屏幕将显示倒计时,等待其完成后进入工作模式。
2. 选择测量模式风速仪具有多种测量模式,如实时测量、最大/最小值记录等。
通过按键切换功能,选择所需的测量模式。
3. 定位传感器将传感器插入待测的气流中,确保传感器正对流动的空气,并保持传感器与气流垂直。
注意避免遮挡或干扰传感器的因素。
4. 进行测量在正确的位置放置传感器后,等待几秒钟以确保测量结果的稳定性。
屏幕将显示当前的风速值,并根据选择的模式记录最大或最小值。
5. 停止测量完成测量后,按下电源按钮,屏幕将显示测量结果的统计信息,如平均值、变化范围等。
6. 关闭风速仪长按电源按钮,风速仪将关闭电源。
若不使用风速仪,请及时取下电池以延长电池寿命。
四、注意事项1. 在进行测量前,请确保传感器和测量环境干净、无异物。
2. 风速仪应避免受到强烈的冲击和挤压,以免损坏仪器。
3. 避免使用风速仪在高温、湿度或有腐蚀性气体的环境中,以确保安全和准确性。
4. 风速仪不具备防水功能,请避免在雨天或潮湿环境中使用。
5. 请定期校准风速仪以确保测量结果的准确性。
五、维护保养1. 定期清洁风速仪的外壳和传感器,可使用干净的软布擦拭。
2. 若长时间不使用风速仪,请取下电池以避免漏电损坏仪器。
3. 如发现仪器异常或功能失效,请联系售后服务中心进行修理或更换。
注意:本产品使用教程仅作为操作参考,如需更多详细信息,请参阅配套的用户手册。
超声波风速风向传感器产品说明书

485型风速风向仪说明书Ver1.0第1章产品简介1.1产品概述超声波风速风向仪,是一款基于超声波原理研发的风速风向测量仪器,利用发送的声波脉冲,测量接收端的时间或频率差别来计算风速和风向。
整机外壳采用ABS材质,具有重量轻、没有任何移动部件、坚固耐用的特点,而且不需维护和现场校准,能同时输出风速和风向。
可以与电脑、数据采集器或其它具有RS485相符合的采集设备连用。
被广泛应用于温室、环境保护、气象站、船舶、码头、养殖等环境的风向测量。
1.2主要参数参数技术指标风速测量范围0~60m/s风速测量精度±2%风向测量范围0~360°风向测量精度±3°响应时间小于5秒波特率9600通讯端口RS485供电电源12VDC工作电流70mA运行温度-30~80℃工作湿度环境0~100%RH(15~95%RH)第1页1.3功能特点◆无启动风速限制,零风速工作,无角度限制,360°全方位,可同时获得风速、风向的数据;◆无移动部件,磨损小,使用寿命长;◆采用声波相位补偿技术,精度高,响应速度快;◆采用随机误差识别技术,大风下也可保证测量的低离散误差,使输出更平稳;◆工程塑料外壳,设计轻巧,携带轻便,安装、拆卸容易◆信号接入方便,支持485-RTU;◆不需维护和现场校准。
第2章硬件连接2.1设备安装前检查安装设备前请检查设备清单:名称数量高精度传感器1台风向485线1条12V防水电源1台(选配)第2页USB转485设备1台(选配)保修卡/合格证1份外形展示:第3页2.1.1接线方式线色说明2电红色电源正源黑色电源负通信黄色485A绿色485B出厂默认提供0.6米长线材,客户可根据需要按需延长线材或者顺次接线。
2.2安装方式第4页采用法兰安装,螺纹法兰连接使风向传感器下部管件牢牢固定在法兰盘上,底盘的圆周上开四个的安装孔,使用螺栓将其紧紧固定在支架上,使整套仪器保持在最佳水平度,保证风向数据的准确性,法兰连接使用方便,能够承受较大的压力。
WFS 风速传感器使用说明书

WFS 系列风速传感器使用说明书[ WT-197V2.0 ]-1--4--2--3-WFS-1型风速传感器应用典型三杯式设计,由壳体、风杯、和电路模块等组成。
本产品通过风杯和进口轴承及其附件的配合,将风的流速转换成机械转速,再通过内部非接触式磁传感应换成电信号,实现对风速的电信号检测。
本产品壳体采用改良型工程塑料注塑成型,美观大方、耐热、耐低温、防水耐腐蚀、电气性能优良。
广泛用于铁路、港口、码头、电厂、索道、环境、养殖、农业、节能监测、工程机械等领域。
测量范围:1.0~60m/s准 确 度:<30m/s±(0.5+0.05v) ≥30m/s±5% 起动风速:<0.1m /s 工作电压:DC12-36V 响应时间:<0.5s环境温度:-20℃~ +70℃ 湿度: 20%-90%RH (25℃不结露)-6-WFS-15.2 信号输出航插座引脚定义1:电源+2:4~20MA 3:NA 4:NA 5:GND例、WFS-1-3 表示信号输出为0-5V 。
5.1 产品选型及引脚定义WFS-2-2 接线定义4~20mA 0~5V Rs4851234厂家型号 输出型号代码 输出型号类型5.3 MODBUS RTU 通讯协议5.3.1参数说明我公司对外输出的通讯采用标准modbus 的RTU 协议。
串口通信方式:RS485通信参数设置:波特率:9600 数据位:8 停止位:1 校验位:无通信超时:建议设置50ms 以上轮询间隔:建议设置50ms 以上5.3.2消息说明接收的命令字格式如下:字节序号 类别 内容 说明 备注0102030405060708消息头可变消息尾XX 030001XX XX XXXX仪表地址 功能码 寄存器地址H 寄存器地址L 数据长度H 数据长度L 根据仪表系统参数设置固定固定根据每台仪表的需要设置随数据的变化而变化CRC16校验码当仪表接收到正确的命令字后,开始回传正确的数据,命令格式如下:字节序号 类别 内容 说明 备注010203消息头回传的数据消息尾仪表地址 功能码 数据长度数据1(风速)数据2(风级)数据3根据仪的地址设置固定 根据每台需要来040506070809XX 03XX H L H L H L ……………………XX XXWFS-2-3 接线定义 WFS-2-4 接线定义数据的长度和每个数据代表的含义根据每台仪表的情况来确定随数据的变化而变化CRC16校验码本产品属精密电子产品,正确的维护保养有助于保护仪器性能、延长传感器的使用寿命,应注意下列几点:1、按说明书要求正确使用,接线有误可能导致传感器损坏.2、轻拿轻放,误压,否则导致产品结构变形损坏,或精度降低。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、产品概述 (2)
二、应用范围 (2)
三、技术参数 (3)
四、功能特点 (4)
五、结构尺寸图 (4)
六、固定方式 (5)
七、信号输出定义 (5)
八、线色定义 (6)
九、脉冲型风速输出电路图 (7)
十、脉冲输出型计算 (8)
十一、RS485/232通讯协议 (8)
十二、风力等级划分表 (11)
十三、风速与输出信号对应表 (12)
一、产品概述
该三杯式风速传感器是我公
司自主研发、生产的一款风速测量
仪器,本品由壳体、风杯和电路模
块组成,内部集成光电转换机构、
工业微电脑处理器、标准电流发生
器、电流驱动器等。
传感器壳体和风杯采用铝合金材料,使用特种模具精密压铸工艺,尺寸公差甚小表面精度甚高,内部电路均经过防护处理,整个传感器具有很高的强度、耐候性、防腐蚀和防水性。
电缆接插件为军工插头,具有良好的防腐、防侵蚀性能,能够保证仪器长期使用,同时配合使用风速传感器内部进口轴承系统说明书,确保了风速采集的精确性。
电路PCB采用军工级A级材料,确保了参数的稳定和电气性能的品质;电子元件均采用进口工业级芯片,使得整体具有极可靠的抗电磁干扰能力,能保证主机在-20℃~+50℃,湿度35%~85%(不结露)范围内均能正常工作。
二、应用范围
本产品可广泛运用于工程机械(起重机、履带吊、门吊、塔吊等)领域,铁路、港口、码头、电厂、气象、索道、环境、温室、
养殖、空气调节、节能监控、农业、医疗、洁净空间等领域风速的测量,并输出相应的信号。
三、技术参数
□脉冲输出型:□NPN输出□PNP输出
□NPN输出带内部上拉(4.7KΩ)
□RS485通讯型
□电压输出型:□0-2VDC □0-5VDC □0-10VDC
□电流输出型: 4-20mA
电源:根据输出类型不同所需的电压源范围不同
电流输出型: 12~24V
电压输出型:输出0-2VDC:6~24V
输出0-5VDC:6~24V
输出0-10VDC:12~24V
脉冲输出型:5~24V
量程:□0-30m/s □0-60m/s
负载能力: □其他□<500Ω□>2kΩ
最大功耗(DC24V): 脉冲型MAX≤200mW;
电压型MAX≤300mW;
电流型MAX≤700mW;
启动风力:0.4~0.8m/s 重量:≤0.5Kg
四、功能特点
该产品自投入市场以来,以其优异的质量,卓越的性能赢得广大用户的好评,具备以下特点:
◆外观结构设计合理、美观大方,体积小,便于携带,安装简便。
◆测量精度高,量程范围宽,稳定性好。
◆有较强的防腐蚀性和耐候性。
◆动态特性好,抗外界干扰能力强,测量精度高。
◆功耗低,电路寿命长,能长期稳定工作;
◆电源适应范围宽,数据信息线性度好,信号传输距离长。
五、结构尺寸图
六、固定方式
传感器应水平安装,确保风向数据的准确性;采用法兰安装方式,传感器下方安装法兰直径Ф60mm,四个安装孔为Ф6.6mm,四个安装孔均匀分布再Ф47mm的圆周上,安装使用法兰固定安装,安装尺寸如下:
七、信号输出定义
电压型和电流型输出定义如下
① 电源正极② 电源负极③ 电压信号④ 电流信号
RS485输出定义
① 电源正极② 电源负极③ A+/RXD ④ B-/TXD
八、线色定义
九、脉冲型风速输出电路图
PNP输出电路图如下:(最大输出电流Icmax=100mA)
当用电压信号时,
需要连接电阻R L
NPN输出电路图如下:(最大灌电流Icmax=20mA)
当用电压信号时,
需要连接电阻R L
内部带上拉电阻NPN输出电路图如下:(R=4.7KΩ)
十、脉冲输出型计算
风速=单位时间内的脉冲数X系数;
公式中:单位时间内指的是1S;
型号尾缀为4CM,则系数为0.3
型号尾缀为8CM,则系数为0.15
型号尾缀为12CM,则系数为0.1
型号尾缀为16CM,则系数为0.075
十一、RS485/232通讯协议
采用了MODBUS-RTU协议的命令子集,使用读寄存器命令(03)(06)。
1、数据传输方式:
8位数据位,1位停止位,无校验位。
2、数据传输速率:
缺省波特率为9600bps,不可修改,用户希望使用其他波特率时,请在定货时声明。
支持波特率:9600bps,4800bps,2400bps,1200bps。
3、数据报文格式
⑴功能码0x03---查询从设备寄存器内容
⑵功能码0x06---对从设备寄存器置数
注:1、CRC检验码低位在前、高位在后,寄存器地址, 寄存器个数,数据均为高位在前、低位在后; 2、寄存器字长为16bit(两个字节);
4、寄存器说明与命令格式
(1)参量数据寄存器定义表
老客户使用过的风速值寄存器地址0x0010、0x0002、0x0000,修改后的协议仍然支持上述地址,客户无需做修改。
数据范围0x0000-0x0BB8代表0-30.00米/秒风速。
(2)命令举例:
命令中所有寄存器地址字节、寄存器个数字节、数据字节高位在前,低位在后;CRC校验码低位字节在前,高位字节在后;
读取风速值:
从设备回应:
修改设备地址:
十二、风力等级划分表
十三、风速与输出信号对应表
风速(m/s)电流输出
4-20mA
电压输出
(0-5V)
电压输出
(1-5V)
电压输出
(0-2V)
1 4.5
2 0.17 1.1
3 0.07
2 5.08 0.3
3 1.27 0.13
3 5.6 0.5 1.
4 0.2
4 6.12 0.67 1.53 0.27
5 6.68 0.83 1.67 0.33
6 7.2 1 1.8 0.4
7 7.72 1.17 1.93 0.47
8 8.28 1.33 2.07 0.53
9 8.8 1.5 2.2 0.6
10 9.32 1.67 2.33 0.67
11 9.88 1.83 2.47 0.73
12 10.4 2 2.6 0.8
13 10.92 2.17 2.73 0.87
14 11.48 2.33 2.87 0.93
15 12 2.5 3 1
16 12.52 2.67 3.13 1.07
17 13.08 2.83 3.27 1.13
18 13.6 3 3.4 1.2
19 14.12 3.17 3.53 1.27
20 14.68 3.33 3.67 1.33
21 15.2 3.5 3.8 1.4
22 15.72 3.67 3.93 1.47
23 16.28 3.83 4.07 1.53
24 16.8 4 4.2 1.6
25 17.32 4.17 4.33 1.67
26 17.88 4.33 4.47 1.73
27 18.4 4.5 4.6 1.8
28 18.92 4.67 4.73 1.87
29 19.48 4.83 4.87 1.93
30 20 5 5 2
十四、维护和保养
本仪器属精密的电子产品,正确的的维护和保养有助于保护仪器性能、延长仪器的使用寿命,请注意以下几点:
1、请依据使用说明书的要求正确使用说明书,接钱有误有可
能导致仪器损坏。
2、不要用挥发性液体擦拭仪器,否则可能导致仪器变色变形;
软布擦拭,避免仪器外部保护膜划伤,延长仪器使用寿命。
3、仪器应轻拿轻放,不得摔落或重压,否则将导致仪器变形、
内部电路板损坏。
4、不要在仪器带电的情况下触摸感应部位,以影响量结果或
导致仪器内部电路的损坏。
5、请勿私自拆卸和改装本仪器,以免对仪器造成损坏。
6、仪器使用时应用螺丝牢固固定,否则有可能损坏仪器。
7、定期检查仪器电源电压,确保仪器正常运行。