基于图像处理的种子发芽长度测量系统的设计与实现
基于MATLAB GUI图像处理系统的设计与实现
基于MATLAB GUI图像处理系统的设计与实现MATLAB是一种功能强大的图像处理工具,其GUI(图形用户界面)设计及实现可以使图像处理更加直观和简单。
本文将介绍基于MATLAB GUI图像处理系统的设计与实现,包括系统的功能设计、界面设计及实现步骤等内容,旨在为使用MATLAB进行图像处理的读者提供一些参考和帮助。
一、系统功能设计1. 图像基本处理功能:包括图像的读取、显示、保存,以及图像的基本操作(如缩放、旋转、翻转等)。
2. 图像增强功能:包括亮度、对比度、色彩平衡调整,以及直方图均衡化、滤波等操作。
3. 图像特征提取功能:包括边缘检测、角点检测、纹理特征提取等。
4. 图像分割功能:包括阈值分割、边缘分割、区域生长等。
5. 图像识别功能:包括基于模板匹配、人工智能算法的图像识别等。
6. 图像测量功能:包括测量图像中物体的大小、长度、面积等。
二、界面设计1. 主界面设计:主要包括图像显示区域、功能按钮、参数调节控件等。
2. 子功能界面设计:根据不同的功能模块设计相应的子界面,以便用户进行更详细的操作。
3. 界面美化:可以通过添加背景图案、调整按钮颜色、字体等方式美化界面,提高用户体验。
三、实现步骤1. 图像显示与基本处理:通过MATLAB自带的imread()函数读取图像,imshow()函数显示图像,并设置相应的按钮实现放大、缩小、旋转、翻转等基本操作。
2. 图像增强:利用imadjust()函数实现对图像亮度、对比度的调整,利用histeq()函数实现直方图均衡化,利用imfilter()函数实现图像的滤波处理。
3. 图像特征提取:利用edge()函数实现图像的边缘检测,利用corner()函数实现角点检测,利用texture()函数实现纹理特征提取。
4. 图像分割:利用im2bw()函数实现阈值分割,利用edge()函数实现边缘分割,利用regiongrowing()函数实现区域生长。
大学生创新题目 老师题目供学生参考
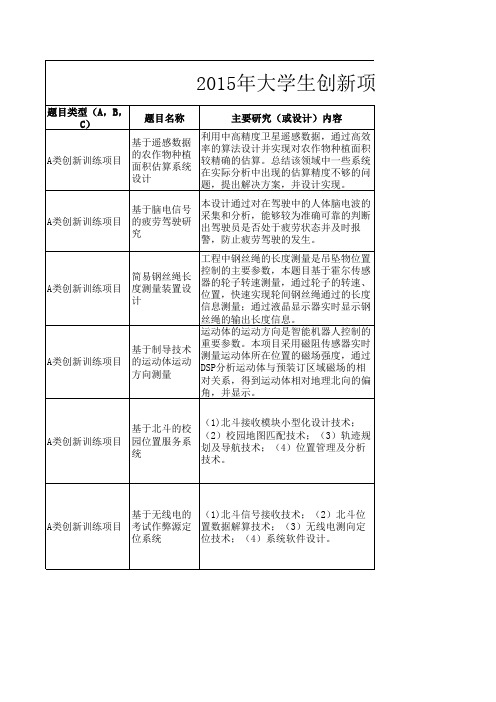
A类创新训练项目
基于脑电信号 的疲劳驾驶研 究
本设计通过对在驾驶中的人体脑电波的 采集和分析,能够较为准确可靠的判断 出驾驶员是否处于疲劳状态并及时报 警,防止疲劳驾驶的发生。
A类创新训练项目 A类创新训练项目
简易钢丝绳长 度测量装置设 计
基于制导技术 的运动体运动 方向测量
工程中钢丝绳的长度测量是吊坠物位置 控制的主要参数,本题目基于霍尔传感 器的轮子转速测量,通过轮子的转速、 位置,快速实现轮间钢丝绳通过的长度 信息测量;通过液晶显示器实时显示钢 丝绳的输出长度信息。 运动体的运动方向是智能机器人控制的 重要参数。本项目采用磁阻传感器实时 测量运动体所在位置的磁场强度,通过 DSP分析运动体与预装订区域磁场的相 对关系,得到运动体相对地理北向的偏 角,并显示。
A类创新训练项目 A类创新训练项目 B类创新训练项目
本设计为设计、制作一个基于单片机的
8*8点阵书写显示屏,该书写显示屏在
光笔和控制器的作用下,能实现点亮、
LED点阵书写显 反显、笔画擦除、等书写显示功能。文
示屏
章给出了以AT89S52为核心的软硬件设
计方案,并完成了系统中各模块的设
计,使LED点阵从单一的显示模块变为
A类创新训练项目
基于北斗的校 园位置服务系 统
(1)北斗接收模块小型化设计技术; (2)校园地图匹配技术;(3)轨迹规 划及导航技术;(4)位置管理及分析 技术。
基于无线电的 (1)北斗信号接收技术;(2)北斗位
A类创新训练项目 考试作弊源定 置数据解算技术;(3)无线电测向定
位系统
位技术;(4)系统软件设计。
基于光纤微泡 结构的集成、 高灵敏度高温 高压传感器
基于布喇格光 栅的炸药熔铸 温度监测研究
基于图像处理的钢卷尺自动检定系统
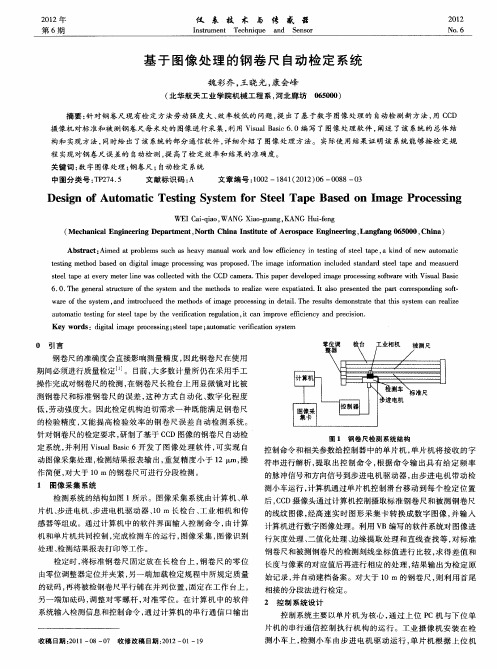
解决的 问题是 : 采用正确 的方法检 测 出标 准和被测 钢卷尺 的米
刻线中心位置 , 使系统的测量精度得 到保证 。
3 1 图像灰度化处 理 .
采集的 图像并不能直接 用识别程序 进行识别 , 先需要进 首
构和 实现 方法, 同时给 出了该 系统的部分通信软件 , 细介 绍 了图像 处理方法。 实际使 用结果证 明该 系统 能够按检 定规 详
程 实现 对钢 卷 尺 误 差 的 自动 检 测 , 高 了检 定 效 率 和 结 果 的 准 确 度 。 提
关键 词 : 字 图像 处 理 ; 卷 尺 ; 数 钢 自动 检 定 系统 中 图 分 类 号 :P7 . T245 文献标识码 : A 文章 编 号 :02—14 ( 0 2 0 0 8 0 10 8 12 1 ) 6— 0 8— 3
定 系 统 , 利 用 V sa B s 并 i l ai 6开 发 了 图像 处 理 软 件 , 实 现 自 u c 可 动 图 像 采 集 处 理 , 测 结 果 报 表 输 出 , 复 精 度 小 于 1 m, 检 重 2 操
图 1 钢 卷 尺 检 测 系 统 结 构
控制命令和相关参数 给控制器 中的单片机 , 片机将接 收 的字 单 符 串进行解析 , 提取 出控制 命令 , 根据 命令输 出具 有 给定 频率
wa eo he s se , n mto l e d t e m eh d fi g r c s ig i e al Th e ulsde o sr t ha h ss se c n r aie r ft y tm a d i r c u e h t o s o ma e p o e sn n d t i. e r s t m n tae t tt i y tm a e z l a o tc tsi g fr se ltp he v rfc to eg ai n,tc n i p o e efce y a e ii n utma i e tn o te a e by t ei a in r ulto i a m r v f inc nd pr cso . i i
玉米精量播种机排种监测系统设计
玉米精量播种机排种监测系统设计玉米精量播种机排种监测系统设计随着农业技术的发展,越来越多的农民选择使用玉米精量播种机来播种作物。
这种现代化的播种机具有高效、精准的特点,能够提高种植效率和作物产量。
然而,由于播种机操作的复杂性,农民往往需要付出更多的精力和时间来监测播种情况,以确保种植效果。
为了解决这个问题,我们设计了一种玉米精量播种机排种监测系统,旨在帮助农民实现自动化的排种监测。
玉米精量播种机排种监测系统由若干传感器、数据采集设备、控制模块和用户界面组成。
首先,我们在播种机的排种装置上安装了压力传感器,用于监测播种时排种器的工作压力。
通过实时监测播种器的工作压力,我们可以判断是否存在堵塞、漏种等问题,及时进行调整和修复。
其次,我们在播种机的种植槽中安装了光电传感器,用于检测种子的排放情况。
光电传感器可以感知到种子在种植槽中通过的光线变化,从而判断种子的排放情况。
如果光电传感器检测到排放异常,系统会自动发出警报,并记录异常的位置和时间,方便农民及时处理问题。
此外,我们还在播种机的耕作部分安装了霍尔传感器,用于监测播种机的移动状态。
通过监测霍尔传感器的输出信号,我们可以实时了解播种机的移动速度和位置。
这对于精准播种非常重要,因为播种机的移动速度和位置会影响种子的排放间距和深度。
当播种机的移动速度或位置异常时,系统会发出警报,帮助农民及时调整播种操作。
最后,我们设计了一个用户界面,用于显示和记录播种机的监测数据。
农民可以通过此界面实时查看播种机的工作状态和监测数据,包括工作压力、种子排放情况、播种机的移动速度和位置等。
同时,系统还支持数据的导出和分析,帮助农民总结经验,改进种植技术,提高作物产量。
通过上述设计,玉米精量播种机排种监测系统能够实现自动化的播种监测,为农民提供了便利和准确的种植工具。
农民只需要在播种前简单设置系统参数,然后系统就能自动监测排种过程,并在发现异常时及时发出警报。
这大大减轻了农民的操作负担,提高了种植效率和作物产量。
基于FPGA的图像处理系统设计与实现

基于FPGA的图像处理系统设计与实现图像处理是计算机视觉领域中的重要技术之一,可以对图像进行增强、滤波、分割、识别等操作,广泛应用于医学图像处理、工业检测、安防监控等领域。
而FPGA(Field Programmable Gate Array)可编程门阵列,则是一种自由可编程的数字电路,具有并行处理能力和灵活性。
本文将介绍基于FPGA的图像处理系统的设计与实现。
一、系统设计流程1. 系统需求分析:首先需要明确图像处理系统的具体需求,例如实时性、处理的图像类型、处理的算法等。
根据需求,选择合适的FPGA芯片和外设。
2. 图像采集与预处理:使用图像传感器或摄像头采集图像数据,然后对图像进行预处理,如去噪、增强、颜色空间转换等,从而提高后续处理的准确性和效果。
3. 图像处理算法设计与优化:根据具体的图像处理需求,选择适合的图像处理算法,并对算法进行优化,以提高处理速度和效率。
常用的图像处理算法包括滤波、边缘检测、图像分割等。
4. FPGA硬件设计:基于选定的FPGA芯片,设计硬件电路,包括图像存储、图像处理模块、通信接口等。
通过使用硬件描述语言(如Verilog、VHDL)进行功能模块设计,并进行仿真和验证。
5. 系统集成与编程:将设计好的硬件电路与软件进行集成,包括FPGA程序编写、软件驱动开发、系统调试等。
确保系统的稳定运行和功能实现。
6. 系统测试与优化:对整个系统进行完整的测试和验证,包括功能性测试、性能测试、稳定性测试等。
根据测试结果,对系统进行优化,提高系统的性能和可靠性。
二、关键技术及挑战1. FPGA芯片选择:不同的FPGA芯片具有不同的资源和性能特点,需要根据系统需求选择合适的芯片。
一方面需要考虑芯片的处理能力和资源利用率,以满足图像处理算法的实时性和效果。
另一方面,还需要考虑芯片的功耗和成本,以便在实际应用中具有可行性。
2. 图像处理算法优化:在FPGA上实现图像处理算法需要考虑到算法的计算复杂度和存储开销。
基于图像分析的几何尺寸比较测量方法研究(硕士论文)200706

第五章
5.1 5.2 5.3 5.4 5.5
影响测量精度的因素 .......................................................... 43
引言 ............................................................................................................43 图像采集过程中干扰因素的影响 ............................................................43 目标分割过程中的影响因素 ....................................................................44 特征量计算过程中影响的因素 ................................................................44 本章小结 ....................................................................................................45
第三章
数字图像的目标分割 ........................................................... 9
3.1 引言 .............................................................................................................9 3.2 中值滤波 ....................................................................................................10 3.3 图像的增强处理 ........................................................................................12 3.4 灰度图像的二值化处理 ............................................................................14 3.4.1 图像二值化原理及其关键问题 .....................................................14 3.4.2 最大方差法计算灰度阈值原理 .....................................................16 3.4.3 最大方差法确定分割门限流程图 .................................................17 3.4.4 实验效果 .........................................................................................18 3.5 边缘检测 ....................................................................................................18 3.5.1 引言 .................................................................................................18 3.5.2 高斯滤波器 .....................................................................................18 3.5.3 坎尼算法步骤 .................................................................................19 3.5.4 索贝尔算子边缘检测 .....................................................................21 3.5.5 高斯的拉普拉斯算法 .....................................................................23 3.5.6 Roberts 梯度算法边缘检测 ............................................................25 3.5.7 Prewitt 算子边缘检测 .....................................................................25 3.5.8 几种边缘检测算法边缘检测结果的比较 .....................................27 3.5.9 边缘的数学形态学方法处理 .........................................................28 3.5.10 边缘跟踪抑制噪声和确定边缘点的实际方向 ...........................30
国内外播种监测技术研究现状及未来发展方向

国内外播种监测技术研究现状及未来发展方向作者:张莉莉牛巧萍韩方玲来源:《南方农业·上》2024年第03期摘要长期以来,农民判断播种质量的优劣都是凭经验、靠感觉。
随着农业机械化、智能化的飞速发展,这种方式将逐步被淘汰。
近年来,国内外科研工作者基于各种类型的播种机、排种器做了很多播种监测方面的研究。
为了更好地适应发展需求,综述了国内外主要播种监测技术(压电监测法、光电监测法、电容监测法、机器视觉+图像监测法等)的工作原理、系统组成、适用对象及相关研究进展,提出了我国未来播种监测的3个发展方向:1)向高频、宽辐方向发展,研发适应高频、宽幅的播种监测系统;2)将播种监测系统中融入高精度的定位系统,实现在播种作业过程中实时生成播量图、播种性能指标状态图;3)针对目前各类型监测系统普遍出现的抗干扰能力差、适应性差等问题,开发出适合我国各类型播种机的传感系统。
关键词播种监测;机械化;工作原理;应用现状;发展方向中图分类号:S223.2 文献标志码:A DOI:10.19415/ki.1673-890x.2024.05.049中国耕地面积不到全球的7%,却要养活占全球22%的人口。
因此,我们必须为农作物创造最佳的条件,来实现尽可能高的农作物产量。
播种作为农业生产过程中非常重要的一环,播种质量的好坏将直接影响农作物产量的高低。
随着农业机械化的全面推广,播种作业普遍采用各种类型的播种机来实现。
排种器作为播种机的核心部件,其排种质量的好坏对播种质量将产生直接影响。
目前,播种机上使用的各类型排种器通常是封闭的,我们无法通过肉眼观察到排种质量的好坏。
排种器一旦出现堵塞、缺种等情况,就会大大影响播种质量。
如果后期出苗后,在漏播的位置上补苗,不仅费时费力,而且会严重影响农作物的产量。
如果能够在播种作业过程中及时发现缺种、漏播等情况,就能够及时采取措施减少损失。
目前,国内外专家学者普遍采用压电监测法、光电监测法、电容监测法、机器视觉+图像监测法实现对播种质量的监测。
计算机视觉技术在玉米种子自动检测中的应用

计算机视觉技术在玉米种子自动检测中的应用潘㊀霞1ꎬ谭会君2(1.河南经贸职业学院ꎬ郑州㊀450000ꎻ2.漯河职业技术学院ꎬ河南漯河㊀462002)摘㊀要:玉米种子的品质关系到后期玉米种植收获的好坏ꎬ也是玉米收获后的重要加工环节ꎬ一般在收获的玉米中挑选出品质优良的作为种子ꎮ利用计算机视觉对玉米种子品质进行挑选ꎬ具有效率高㊁准确度高的优势ꎬ可代替传统的人工作业ꎬ节省了大量劳动力ꎮ计算机视觉技术是通过对玉米种子采集的图像进行格式转换㊁图像变换㊁图像直方图信息统计㊁图像增强㊁图像分割及形态学处理等一系列图像预处理技术ꎬ并提取有效图像进行分析验算ꎮ计算机视觉技术对玉米种子品质的研究主要表现在玉米种子的品种㊁纯度㊁活力㊁裂纹等方面的检测ꎬ本文对玉米种子的检测智能化进行了阐述ꎬ为后期研究提供参考ꎮ关键词:计算机视觉技术ꎻ玉米种子ꎻ图像处理ꎻ品质检测ꎻ品质分级中图分类号:S126㊀㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)03-0228-040㊀引言计算机视觉技术涉及诸多领域ꎬ由机器来代替肉眼完成工作ꎬ机器视觉在各类生产中的应用逐渐开始普及ꎮ机器视觉在农业种植中主要用于作物品种检测㊁病害检测㊁采摘㊁品质检测及品质分级等方面[1-6]ꎮ根据数据统计ꎬ2007年我国玉米总产量约为1.45亿tꎬ到2016我国玉米总产量约为2.19亿tꎮ随着种子市场的放开ꎬ种子的质量比较难以把控ꎬ对玉米种子的检测显得尤为重要ꎮ将计算机视觉技术应用于种子自动检测的研究已有许多ꎬ如中国农业大学的宁纪峰等[7]通过对采集的单颗玉米粒图像处理后ꎬ提取特征参数图像ꎬ通过提取的图像形态分析玉米的品种ꎮ成芳等[8-9]研究水稻品种识别中采用了计算机视觉技术ꎮ闸建文等[10]利用计算机建立玉米品种识别标准ꎬ识别率可达到88%ꎮ在玉米种植中ꎬ玉米的产量很大程度取决于种子的质量ꎮ为此ꎬ本文综述这方面的研究信息ꎬ为后期研究提供参考ꎮ1㊀检测图像的采集用于图像采集的设备主要包括取像设备和采集卡ꎬ目前用于取像的设备多为CCD(CMOS)摄像机及数字扫描仪ꎬCCD摄像机对静态摄像来说是比较经济收稿日期:2017-11-06基金项目:河南省科技计划项目(172102210117)作者简介:潘㊀霞(1982-)ꎬ女ꎬ郑州人ꎬ讲师ꎬ硕士ꎬ(E-mail)ping84763173kaoshi@163.comꎮ通讯作者:谭会君(1982-)ꎬ女ꎬ河南漯河人ꎬ讲师ꎬ硕士ꎮ合理的选择ꎮ采集图像要显示清晰ꎬ背景的选择尤为重要ꎬ需要采集的图像实物是玉米种子ꎬ玉米种子多为黄白色ꎬ因有比较大的对比度会显示更清楚ꎬ故选择黑色为背景ꎮ由于采集图像时光照可能会不好ꎬ需要对光照强度进行补偿ꎬ有光线照到玉米种子上就会形成阴影ꎬ阴影过多过大会对图像的采集造成很严重的影响ꎬ对后期图像的处理和识别都会构成很大的障碍ꎮ所以ꎬ光源的性状选择为造成阴影少的环形光源ꎬ并添加光罩ꎬ减少外界杂乱光线的影响ꎮ采集成像设备如图1所示ꎮ图1㊀采集成像设备Fig.1㊀Collectimagingequipment2㊀图像处理分析检测程序(见图2)中ꎬ重要的是图像处理和特征提取ꎬ图像处理(见图3)是为了提取需要的特征图像做的准备工作ꎬ包括灰度分布㊁图像增强㊁分割取样及2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期图像滤波等[10-13]ꎮ在图像处理前还应当考虑到采集图像时的背景颜色是否控制ꎬ在允许的条件下ꎬ应选择单一颜色的背景ꎬ且背景颜色与玉米的对比度要大ꎻ在进行玉米种子检测时还应考虑颜色特征对识别结果的影响ꎮ玉米种子在检测时ꎬ由于玉米中的性状不规则ꎬ且容易发生移动ꎬ图像处理时需要考虑到空间位置的移动和玉米轮廓的变化ꎮ图2㊀玉米自动检测程序Fig.2㊀Cornautomatictestingprogram图3㊀图像处理基本程序Fig.3㊀Imageprocessingbasicprocedures图像处理的后期工作就是提取图像中的特征参数ꎬ通过标记需要的图像轮廓ꎬ沿着标记轮廓将特征图像分割出来ꎬ并采用多对象算法提取ꎬ对提取形态特征参数和颜色特征参数进行识别ꎮ提取特征参数流程如图4所示ꎮ图4㊀图像特征提取基本程序Fig.4㊀Imagefeatureextractionbasicprocedures3㊀玉米种子品种检测在玉米育种㊁种子的销售等环节中ꎬ品种的检测是必要程序ꎮ国内外许多学者进行了基于机器视觉技术的种子品种研究ꎮSHEN等[14]通过扫描仪扫描5种玉米种子ꎬ通过距离判断式并结合神经网络ꎬ形成分类器系统软件进行品种的检测识别ꎮPEARSON[15]采用彩色摄像机采集玉米粒图像ꎬ并提取图像特征参数识别玉米粒品种ꎮ郑敏江等[16]通过数码相机采集图像ꎬ将图像增强滤波后ꎬ使用BP神经网络系统识别区分玉米品种ꎮ徐静玉等[17]使用传感器进行对玉米种子的颜色识别ꎮ曹长虎等[18]将采集的图像处理后ꎬ摒弃传统的算法ꎬ以多对象标记算法分析玉米粒参数ꎬ通过对玉米粒的面积㊁周长㊁中心线位置和长度㊁密实度等多个参数进行分析ꎬ识别算数模块采用BP神经网络系统的遗传网络算法ꎬ将提取的特征参数与参数数据库中的参数相比较分析ꎬ正确识别玉米品种ꎮ张俊雄等[19]研究利用CCD摄像机采集图像ꎬ采用分析尖端区域ꎬ用识别检测玉米种子内部是否有裂纹ꎬ玉米种子品种识别度达到90%ꎮ史中辉等[20]采用摄像机采集玉米种子的图像ꎬ处理后提取形态和颜色两种特征参数ꎬ来识别玉米种子的品种ꎮ司秀丽等[21]采用彩色摄像机采集图谱ꎬ对图像进行灰度分别㊁图像分割等处理ꎬ与标准图谱相比较ꎬ经试验检测到玉米种子的识别度达到99.5%ꎮ闫小梅等[22]采用CCD摄像机获取图像ꎬ图像处理后提取颜色特征参数ꎬ玉米种子品种的识别度达到93.7%以上ꎮ刘双喜等[23]采用CCD摄像机采集玉米种子尖端图像ꎬ分割尖端区域的颜色特征图像ꎬ采用DBSCAN算法进行玉米识别ꎬ识别率达93.3%ꎮ利用计算机视觉技术来自动识别玉米品种ꎬ通过采用多对象轮廓提取算法ꎬ分析玉米粒的性状特征和颜色特征ꎬ定义玉米粒的各项参数特征ꎬ并分析提取的特征图像ꎬ提高玉米种子品种的识别度ꎮ4㊀玉米种子纯度检测种子的纯度是玉米种子质量控制的指标之一ꎬ种子市场的混乱ꎬ以次充好的种子进入市场会严重损害农户的利益ꎬ因此玉米种子的纯度检测非常重要ꎮ目前ꎬ检测纯度的方法有籽粒形态法㊁幼苗形态法及蛋白质电泳法ꎮ籽粒形态法适用于亲本自交系近的杂交种子ꎬ幼苗形态法适用品种少ꎻ但周期长ꎬ不利于生产种植ꎮ蛋白质电泳法分析快速ꎬ结果可靠ꎻ但该方法检测种子纯度的速度慢ꎬ无法满足大规模的种植要2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期求ꎮ计算机视觉检测玉米纯度可以快速准确地达到要求ꎮ朱晓[24]利用高频反射图像ꎬ提取多个特征图像参数ꎬ通过改进的遗传算法分析图像ꎬ建设了分级数据库ꎬ该数据库检测玉米种子纯度的准确率达到97%以上ꎬ检测效果稳定ꎮ司秀丽等[22]采用彩色摄像机采集图像ꎬ将采集的图像灰度分布㊁增强且均衡化ꎬ得到的图像与电泳比较判断纯度ꎮ周红等[25]在玉米种子纯度检测中ꎬ利用计算机视觉技术对不同品种玉米种子进行区别精度高ꎮ5㊀玉米种子活力检测玉米种子的活力是指在实际种植的情况下ꎬ决定玉米种子出苗和生长为健康幼苗的潜在能力ꎮ活力好的种子有发芽率高㊁出苗整齐的优点ꎬ也有很好的抗逆性ꎬ种子活力的检测方法有常规的电导率测定㊁四唑染色法及发芽实验法ꎮ四唑染色法是玉米种子活力检测方法中国际上公认的一种可靠的检测方法ꎬ该方法通过染色玉米的种胚ꎬ观察种胚染色的深浅和面积来判断玉米种子的活力ꎮ由于颜色的深浅以肉眼来判断很难达到要求ꎬ染色的面积也是不规则的ꎬ常规方法无法计算出来ꎬ因此可以结合计算机视觉技术来检测ꎬ将染色的种胚为目标采集图像ꎬ提取图像中的颜色特征参数ꎬ便可检测活力的水平ꎬ提高了检测效率和精度ꎮ赵新子等[26]采用四唑染色法与计算机视觉技术相结合的方法ꎬ对染色后种胚采集图像ꎬ提取颜色特征参数ꎬ并计算染色面积ꎬ判断种子的活力水平ꎬ经试验验证该方法的识别率为94%ꎮ6㊀玉米种子裂纹检测玉米种子产生裂纹后会影响到种子的发芽率ꎬ易引起发热和遭受害虫及霉菌的侵袭ꎬ必须严格检测玉米是否有裂纹ꎮ朱文学等[27]用显微镜检测玉米种子的裂纹ꎬ观察裂纹的变化情况ꎮGunasekaranS[28]利用商用的计算机视觉程序采集玉米种子的图像ꎬ可以快速识别玉米种子内部的裂纹ꎮ其利用去除尖端区域的方法[29-30]可以减少干扰检测的无裂纹区域对识别的影响ꎬ对两个品种进行了是否有裂纹识别ꎬ准确度可达到90%以上ꎮ张俊雄等[19]表面裂纹检测:采集玉米种子的单颗图像后通过分割阈值㊁膨胀等处理ꎬ判定玉米种子的尖端区域ꎬ识别率过90%ꎮ研究证明:该方法对于玉米种子内部裂纹的测定具有很好的实用性ꎮ7㊀结论1)将计算机视觉技术用于玉米种子的自动检测ꎬ在图像处理㊁特征提取与识别等方面还存在一些问题ꎬ后面的深入研究将向智能化方向延伸ꎮ随着计算机技术的发展ꎬ在农业种植生产中会有更多环节被智能化机器代替ꎮ2)计算机视觉技术在玉米种子检测的自动化对于我国玉米种植业的发展有着积极的作用ꎬ为种植户提供更高的保障ꎮ由于在玉米种子自动化检测方面ꎬ还存在许多问题ꎬ如玉米种子内部霉变是否存在ꎬ动态情况下如何准确的检测玉米种子等ꎬ因此研究出更精确和多功能的玉米种子自动检测设备ꎬ实现精准农业具有重要意义ꎮ参考文献:[1]㊀王玉亮.基于机器视觉的玉米种子品种识别与检测研究[D].泰安:山东农业大学ꎬ2008.[2]㊀YonekawaSꎬSakaiNꎬKitaniO.Threedimensionalmeasure ̄mentofloamclodsusingmachinevision[J].TransoftheASAEꎬ1994ꎬ37(3):1003-1009.[3]㊀屈赘ꎬ吴玉洁ꎬ刘盼.计算机视觉技术在农作物病虫草害防治中的研究进展[J].安徽农业科学ꎬ2011ꎬ39(9):5570-5571.[4]㊀鲍官军ꎬ荀一ꎬ威利勇ꎬ等.机器视觉在黄瓜采摘机器人中的应用研究[J].浙江工业大学学报ꎬ2010ꎬ38(1):114-118.[5]㊀应义斌ꎬ蒋亦元.机器视觉技术在农产品品质自动识别中的应用研究进展[J].农业工程学报ꎬ2000ꎬ16(3):4-7. [6]㊀毛璐ꎬ赵春江ꎬ王开义ꎬ等.机器视觉在农产品物流分级检测中的应用[J].农机化研究ꎬ2011ꎬ33(7):7-13. [7]㊀宁纪峰.玉米品种的计算机视觉识别研究[D].杨凌:西北农林科技大学ꎬ2002.[8]㊀成芳.应义斌.机器视觉技术在农作物种子质量检验中的应用研究进展[J].农业工程学报ꎬ2001ꎬ17(6):175-179.[9]㊀成芳.稻种质量的机器视觉无损检测研究[D].杭州:浙江大学ꎬ2004.[10]㊀阮秋琦.数字图像处理学[M].北京:电子工业出版社ꎬ2001:192ꎬ199.[11]㊀何斌ꎬ马天予ꎬ王运坚ꎬ等.VisualC++数字图像处理[M].2版.北京:人民邮电出版社ꎬ2002.[12]㊀RafaclC.GonzalezꎬRichardE.Woods.数字图像处理[M].2版.北京:电子工业出版社ꎬ2005.[13]㊀WilliamKPratt.数字图像处理[M].北京:机械工业出版社ꎬ2005.[14]㊀SHENX.Combiningdinsceiminantanalysisandneuralnet ̄worksforcornvarietyidentification[J].ComputersandE ̄2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期lectronicsinAgricultureꎬ2010ꎬ71(S1):48-53. [15]㊀PEARSONT.Hardware-basedimageprocessingforhigh-speedinspectionofgrains[J].ComputersandElectronicsinAgricultureꎬ2009ꎬ69ꎻ12-18.[16]㊀郑敏江.基于数字图像处理的玉米种子质量分级方法研究[D].武汉:武汉理工大学ꎬ2005.[17]㊀徐静玉.米种子光电分选技术及装置的研究[D].长春:吉林大学ꎬ2009.[18]㊀曹长虎.李亚非一种二值图像连通区域标记快速算法[J].科学技术与工程ꎬ2010ꎬ33(10):8167-8170. [19]㊀张俊雄ꎬ荀一ꎬ李伟.基于形态特征的玉米种子表面裂纹检测方法[J].光学精密工程ꎬ2007ꎬ15(6):951-956. [20]㊀史中辉ꎬ赵秀艳ꎬ于广洋ꎬ等.基于图像处理的玉米种子特征参数提取系统[J].农机化研究ꎬ2011ꎬ33(10):166-170.[21]㊀司秀丽ꎬ吴巍ꎬ赵新子ꎬ等.玉米种子纯度的计算机图像识别[J].吉林农业大学学报ꎬ2005ꎬ27(6):694-697. [22]㊀闰小梅ꎬ刘双喜ꎬ张春庆ꎬ等.基于颜色特征的玉米种子纯度识别[J].农业工程学报ꎬ2010ꎬ26(S1):46-50. [23]㊀刘双喜ꎬ王盼ꎬ张春庆ꎬ等.基于优化DBSCAN算法的玉米种子纯度识别[J].农业机械学报ꎬ2012ꎬ43(4):188-192.[24]㊀朱晓.玉米高光谱图像的特征提取与分类研究[D].无锡:江南大学ꎬ2013.[25]㊀周红ꎬ刘光蓉ꎬ管庶安.数字图像处理技术在玉米种子轮廓检测中的应用[J].种子ꎬ2004ꎬ23(9):90-92. [26]㊀赵新子ꎬ吴巍ꎬ司秀丽.玉米种子活力图像识别与处理技术研究[J].吉林农业大学学报ꎬ2004ꎬ26(5):572-576. [27]㊀朱文学ꎬ曹崇文.玉米应力裂纹的显微分析[J].农业工程学报ꎬ1998ꎬ14(2):98-202.[28]㊀GUNASEKARANSꎬCOOPERTMꎬBERLAGEAGꎬetal.ImageProcessingforStressCracksinCornKerneis[J].TransoftheASAEꎬ1987ꎬ28(1):266-271.[29]㊀GIAKOUMISIꎬNIKOLAIDISNꎬPITASI.Digitaiimageprocessingtechniguesforthedetectionandremovaiofcracksindigitizedpaintings[J].TransactionsonImageProcessingꎬ2006ꎬ15(1):178-188.[30]㊀宁纪峰ꎬ何东健ꎬ杨蜀秦.玉米籽粒的尖端和胚部的计算机视觉识别[J].农业工程学报ꎬ2004ꎬ20(3):117-119.ApplicationofComputerVisionTechnologyinMaizeSeedAutomaticDetectionPanXia1ꎬTanHuijun2(1.HenanEconomyandTradeVocationalCollegeꎬZhengzhou450000ꎬChinaꎻ2.LuoheVocationalTechnologyCollegeꎬLuohe462002ꎬChina)Abstract:Cornqualityisrelatedtothequalityoflatecornharvestedharvestisgoodꎬbutalsoanimportantpost-harvestprocessingofcornꎬharvestedcornpickedoutofgoodqualityasaseed.Theuseofcomputervisiontoselectthequalityofcornseedshastheadvantagesofhighefficiencyandhighaccuracyꎬwhichcanreplacethetraditionalartificialdivisionandsavealotoflabor.Computervisiontechnologyisaseriesofimagepreprocessingtechnologiesꎬsuchasformatconver ̄sionꎬimagetransformationꎬimagehistogramstatisticsꎬimageenhancementꎬimagesegmentationꎬmorphologicalprocess ̄ingandsoonꎬwhicharecollectedbythecornseed.Featureextractionvalidimagesareanalyzedandchecked.There ̄searchesonthecornseedqualitybycomputervisiontechnologymainlystudythedetectionofcornseedvarietyꎬpurityꎬvitalityꎬcrackandsoonꎬandsummarizethedetectionintelligenceofcornseedꎬandprovidereferencesforthelaterre ̄search.Keywords:computervisiontechnologyꎻcornseedꎻimageprocessingꎻqualitytestingꎻqualitygrading2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期。
芽管形成试验方法和结果
芽管形成试验方法和结果芽管形成试验(Germination tube formation assay)是一种研究植物种子发芽过程的实验方法。
这种实验通常用于评估种子的发芽能力、研究植物生长调节剂对种子发芽的影响以及探究发芽过程中的生理生化变化。
以下是芽管形成试验的方法和结果:实验方法:1. 预处理种子:将种子浸泡在水中或者生长调节剂溶液中进行预处理。
预处理的时间和浓度因种子和生长调节剂不同而有所改变。
2. 实验设置:将预处理过的种子分别放置在相应的实验组和对照组中。
实验组通常使用不同浓度的生长调节剂溶液,而对照组使用水或者无生长调节剂的培养基。
3. 培养环境:将实验组和对照组放置在适宜的温度、湿度和光照条件下进行培养。
这些条件需要根据所研究的物种来进行调整。
4. 观察记录:在培养过程中定期观察并记录种子的发芽情况,主要包括发芽率、发芽时间、芽管长度等指标。
5. 结果分析:对实验结果进行统计分析,比较不同处理之间的巠植物生长调节剂对种子发芽的影响以及探究发芽过程中的生理生化变化。
实验结果:1. 发芽率:实验结果会显示出不同处理下的发芽率,通常生长调节剂的浓度和种子发芽率之间会呈现出一定的规律。
例如,适当浓度的生长调节剂可以促进种子发芽,而过高或者过低的浓度可能会抑制种子发芽。
2. 发芽时间:实验结果还会反映出不同处理下种子的发芽时间,生长调节剂可能会影响种子的发芽速度。
例如,一些生长调节剂可以缩短种子的发芽时间,使其更快地发芽。
3. 芽管长度:实验结果还会展示出不同处理下芽管的生长长度。
这个指标可以帮助研究者了解生长调节剂对种子萌发阶段生长的具体影响。
4. 生理生化指标:通过分析实验结果,研究者还可以探究发芽过程中的生理生化变化,如酶活性、激素含量等。
这些指标有助于更深入地了解植物种子发芽过程中的调控机制。
综上所述,芽管形成试验是一种研究植物种子发芽过程的有效方法,实验结果有助于了解生长调节剂对种子发芽的影响以及发芽过程中的生理生化变化。
种子区域生长算法在图像分割中的应用研究
种子区域生长算法在图像分割中的应用研究在图像处理领域,图像分割是一个重要的研究方向。
图像分割指的是将一幅图像分成若干个互不重叠的区域,每个区域内的像素具有相似的属性,例如颜色、纹理、亮度等等。
图像分割在计算机视觉、人机交互、媒体处理等领域有着广泛的应用。
而种子区域生长算法是一种常见的图像分割算法之一,它基于像素的相似度,将像素不断合并成区域的过程。
一、种子区域生长算法种子区域生长算法是一种基于像素相似度的图像分割算法,它从一个或多个“种子点”开始,依次将与种子点周围像素相似的像素归为一类,形成一块区域。
种子点可以人为设定,也可以通过自动检测得到。
与其他图像分割算法相比,种子区域生长算法具有一定的实时性和较好的准确度,因此在实际应用中被广泛采用。
二、种子区域生长算法的流程1. 选取种子点。
将图像中的一个像素点作为起始点,或者多个像素点作为起始点,称之为种子点。
2. 确定匹配准则。
通常是通过像素之间的相似度来判断是否属于同一个区域。
相似度的计算方式有很多种,比如欧式距离、曼哈顿距离、余弦相似度等。
3. 执行生长过程。
将与种子点像素相似的像素归为同一区域,在此基础上继续寻找与该区域相连通的像素,并进行相似性判断,逐步扩大区域范围。
4. 结束条件。
通常是规定区域的大小、像素数量或者相似度阈值等来结束生长过程。
当达到结束条件后,算法停止生长,生成一块完整的区域。
三、种子区域生长算法的优缺点1. 优点种子区域生长算法简单易懂,对于照片、医学影像等含有复杂纹理和明显某些特征的图像具有很好的分割效果。
并且可以通过调节同一区域形态特征进行分割。
2. 缺点种子区域生长算法只能分割出固定形状的区域,对于涉及变化形态的图像分割需求相对较差。
且对于不含有显著模式的图像分割效果较差,需要较好的先验知识和参数的调整。
四、种子区域生长算法在图像分割中的应用种子区域生长算法在图像分割中被广泛应用,例如医学影像分割、地理信息系统等领域。
基于OpenCV图像处理的水稻谷粒考种软件的设计
基于OpenCV图像处理的水稻谷粒考种软件的设计作者:罗永泽张广泽林木宋刘骏刘旭欧阳咏霁徐振江刘洪来源:《电脑知识与技术》2023年第35期摘要:该研究基于OpenCV库设计出一款水稻谷粒考种软件。
它首先利用摄像头获取谷粒图像并进行比例尺校正,之后对图像进行灰度化、平滑化、阈值分割和开运算等处理,然后识别谷粒同时依据需要对其轮廓或数量进行修正,最后在OpenCV 椭圆拟合函数的基础上获取谷粒长、宽和周长等考种数据。
通过比对软件测量和人工测量的数据结果,发现软件测量的数据准确性和可靠性均较高,可以替代人工进行水稻谷粒考种分析。
关键词:OpenCV;水稻;考种;软件中图分类号:TP317.4 文献标识码:A文章编号:1009-3044(2023)35-0023-04开放科学(资源服务)标识码(OSID)0 引言水稻(Oryza sativa L.)是全球最重要的粮食作物之一,近一半人口以大米为主食[1]。
在水稻育种和栽培过程中,育种家常常需要对收获后的稻谷进行观测分析,其中形态性状测量(谷粒考种)是重点[2],谷粒考种所涉及的性状主要包括谷粒数量、谷粒长宽和谷粒形状等。
传统的水稻考种主要依靠人工完成,测试成本较高,且测量准确度容易受到操作人员熟练程度和专注度等因素的影响,导致测量质量和效率达不到现代水稻栽培育种研究的发展需求[3]。
为了提高作物考种效率,国内外学者和机构进行了大量的分析研究,其中在光电分析方面,美国的Seedburo公司、法国肖邦(Chopin)公司和德国派福(Pfeuffer)公司先后研制了光电数粒机[4],虽然这些仪器相较于人工数粒有了长足的进步,但该类仪器功能单一只能统计粒数。
近年来,随着计算机视觉分析和人工智能技术的发展,农作物自动化表型分析研究取得了巨大发展。
姚远等[5]在阈值分割、滤波操作和Harris角点检测算法分析的基础上,提出了大豆植株分杈数数学模型,实现了对这个性状的可靠分析。
实验九种子发芽率的快速测定

实验九种子发芽率的快速测定种子发芽率是衡量种子质量的一个关键指标,也是农业生产中重要的技术参数。
传统的种子发芽率测定方法通常需要较长时间,而实验室中采用的一些快速测定方法则能够在较短时间内得出比较准确的结果。
本实验将介绍九种种子快速测定方法,并比较它们的准确度和可靠性。
一、10%氯化钠溶液法方法:取15g无菌细砂,用一次性蒸煮器煮沸5分钟后冷却至室温,加入10ml 10%氯化钠溶液,均匀搅拌后倒入培养皿内,放置于28-30°C低温箱内,20小时后把干燥的种子分别放在上面。
每种种子取100颗,计数发芽率。
优点:简单、易操作、操作时间短,较适合于一些常植物种子快速测定。
缺点:对于一些生命力较强的种子,可能存在阳性误差。
二、10%聚乙二醇(PEG)溶液法方法:取一定质量的PEG,并加入一定量的蒸馏水中,均匀搅拌后得到PEG溶液。
将种子和PEG溶液混合后,放置于高温低湿的环境中(如45-50°C、相对湿度为80%的恒温箱内),观察种子的发芽情况。
每种种子取100颗,计数发芽率。
优点:适用于许多作物的种子快速测定,也适合于对抗逆境的植物。
缺点:操作的过程中存在误差,非专业人员难以掌握。
三、巴布莱酸(GA3)溶液法方法:将GA3溶液与种子混合,然后用过滤纸将混合物包裹,并在相对湿度为90%的环境中进行固定时间的发芽实验。
每种种子取100颗,计数发芽率。
缺点:存在比较大的误差,因此不够准确。
四、过氧化氢(H2O2)溶液法优点:可以准确测量种子的快速发芽,达到测定的目的。
缺点:操作复杂,可能会存在失误。
五、红外线辐射法方法:通过给定参数调节红外线辐射源对种子进行短期照射,并以高分辨率相机拍摄种子的运动轨迹,从而测定其发芽速度。
每种种子取100颗,计数发芽率。
优点:测量方法简便,结果准确可靠。
缺点:设备的投资成本相对较高,比较少用于实际应用。
六、水势算法方法:将种子置于不同浓度的酒精溶液中,然后通过比对种子的生长速度大小,从而测定种子的发芽率。
基于机器视觉的尺寸测量应用综述

基于机器视觉的尺寸测量应用综述机器视觉在尺寸测量方面具有重要应用价值。
与传统的尺寸测量方法相比,机器视觉具有快速、高精度、非接触等特点,可以满足工业生产线上对尺寸测量的要求。
本文将综述基于机器视觉的尺寸测量应用。
1.机器视觉概述机器视觉是计算机和摄像机相结合的技术,它能够模拟人类视觉,自动识别图像中的对象并提供有用的信息。
机器视觉包括图像采集、预处理、特征提取、目标识别、目标定位等过程,旨在实现智能化的图像处理和分析。
2.尺寸测量技术分类在机器视觉中,尺寸测量可以分为两种类型:二维测量和三维测量。
2.1 二维测量二维测量指在图像平面内对目标的长度、宽度、面积等进行测量。
常用的图像处理方法包括边缘检测、模板匹配、形态学处理等。
二维测量广泛应用于板材、纸张、电子产品等工业领域。
在二维测量中,基于机器视觉的尺寸测量应用常用于板材、纸张等工业领域。
例如,对于纸张生产,通过对纸张的长度、宽度、面积等信息进行测量,能够实现自动的纸张质量检测。
4.应用案例4.1 基于机器视觉的汽车车身质量检测系统该系统采用三维测量技术,通过多相机立体视觉进行测量。
系统先在摄像机中标定光轴、焦距等参数,通过多视角图像匹配,测量出了汽车车身的三维尺寸。
系统还针对车身不同部位,设计不同的测量方法,进一步提高测量精度和效率。
该系统采用二维测量技术,通过计算出纸张图像中的边缘信息,进行长度测量。
系统还配备了高速图像采集、图像处理、高精度测量算法等模块,可以实现对纸张长度的快速、准确、稳定测量。
5.总结通过对基于机器视觉的尺寸测量应用进行综述,可以看出机器视觉在尺寸测量方面具有广泛的应用前景。
未来,随着机器视觉技术的不断发展和应用场景的扩展,机器视觉的应用将更加普及和深入。
基于图像预处理的光学元件表面粗糙度测量系统

基于图像预处理的光学元件表面粗糙度测量系统
沈红伟;付苗苗
【期刊名称】《激光杂志》
【年(卷),期】2024(45)5
【摘要】在测量光学元件表面粗糙度时,测量结果往往比较片面,为此设计基于图像预处理技术的光学元件表面粗糙度测量系统。
获取原始元件表面粗糙度干涉图像,通过对表面形貌图像实施图像去噪处理与倾斜校正处理获取滤波结果,通过自适应中值滤波算法实施图像的去噪处理。
在粗糙度参数评定模块中,根据取样长度对评定长度下定义,实施光学元件表面粗糙度的全面评定。
利用设计系统测量三种光学元件的表面粗糙度。
实验结果表明:通过设计系统能够获取高成像质量的表面粗糙度干涉图像,实现多种元件表面粗糙度的全面测量,具有一定应用价值。
【总页数】5页(P252-256)
【作者】沈红伟;付苗苗
【作者单位】沧州师范学院
【正文语种】中文
【中图分类】TN84
【相关文献】
1.测量光学元件表面粗糙度的取样问题
2.基于光学显微镜工件表面粗糙度测量系统的界面设计
3.基于旋滤波的表面粗糙度图像预处理方法
4.基于光纤传感器的元件表面粗糙度测量方法
5.三维成像技术的光学元件表面粗糙度智能测量方法
因版权原因,仅展示原文概要,查看原文内容请购买。
种子发芽率的测定方法

种子发芽率的测定方法一、引言种子发芽率是衡量种子萌发能力和生长潜力的重要指标之一。
准确测定种子发芽率有助于评估种子的质量和种子的适应性,对于农业、园艺、林业等领域的种子生产和种植具有重要意义。
本文将介绍几种常用的种子发芽率测定方法。
二、水培法水培法是一种简单而常用的种子发芽率测定方法。
具体操作步骤如下:1. 准备一定数量的种子样本,将其清洗干净并去除损坏的种子。
2. 准备一只透明的塑料盒或玻璃器皿,底部铺上一层滤纸或细砂,然后加入适量的蒸馏水。
3. 将种子均匀撒在滤纸或细砂上,尽量避免种子之间重叠。
4. 盖上盒子的盖子并放置在适宜的环境条件下,如温度、湿度等。
5. 每天观察并记录种子的发芽情况,通常在一定的时间内(如7天或10天)进行观察。
6. 统计发芽的种子数量,并计算发芽率。
三、纸质培养法纸质培养法也是一种常用的种子发芽率测定方法,相对于水培法更为精确。
具体操作步骤如下:1. 准备一块透明的塑料板或玻璃板,上面铺一层滤纸或过滤纸。
2. 准备一定数量的种子样本,将其清洗干净并去除损坏的种子。
3. 将种子均匀撒在滤纸上,尽量避免种子之间重叠。
4. 盖上塑料袋或玻璃板,形成一个密闭的环境。
5. 将塑料袋或玻璃板放置在适宜的环境条件下,如温度、湿度等。
6. 每天观察并记录种子的发芽情况,通常在一定的时间内(如7天或10天)进行观察。
7. 统计发芽的种子数量,并计算发芽率。
四、温室育苗法温室育苗法是一种模拟自然环境的种子发芽率测定方法,适用于一些对环境要求较高的种子。
具体操作步骤如下:1. 准备一定数量的种子样本,将其清洗干净并去除损坏的种子。
2. 准备一块育苗床或育苗盘,并填充适量的育苗土壤。
3. 将种子均匀撒在育苗床或育苗盘上,尽量避免种子之间重叠。
4. 在播种后,保持土壤湿润,但不要过湿。
5. 将育苗床或育苗盘放置在温室中,提供适宜的光照和温度条件。
6. 每天观察并记录种子的发芽情况,通常在一定的时间内(如7天或10天)进行观察。
基于无人机视频影像的油菜苗检测与计数
基于无人机视频影像的油菜苗检测与计数黄小毛;张维;邱天;朱耀宗;徐世兴;李文成【期刊名称】《农业工程学报》【年(卷),期】2024(40)10【摘要】针对油菜生长早期传统人工苗情调查方法效率低、主观意识强,不能满足大面积或经常性高精度苗期调查作业需求的问题,该研究基于无人机影像及机器学习技术,提出一种油菜苗视频流检测模型及计数方法。
通过对YOLO系列基础模型添加多头自注意力,用BasicRFB(basic receptive field block)模块替换原有的空间池化结构(spatial pyramid pooling-fast,SPPF)模块,并对Neck部分添加一维卷积及更换下采样方式等,进一步结合DeepSORT(deep simple online and real-time tracking)算法和越线计数技术实现对油菜苗的数量统计。
算例测试结果表明,改进后YOLOv5s的交并比阈值0.50的平均精度均值达到93.1%,交并比阈值0.50~0.95的平均精度均值达到了67.5%,明显优于Faster RCNN、SSD和YOLOX等其他经典目标检测算法,交并比阈值0.50的平均精度均值分别高出14.82、26.37和3.3个百分点,交并比阈值0.50~0.95的平均精度均值分别高出25.7、33.9和6.7个百分点。
油菜苗计数试验结果表明,离线视频计数时,在合理的种植密度区间内,所提算法的油菜苗计数精度平均达到93.75%,平均计数效率为人工计数的9.54倍;在线实时计数时,在不同天气情况下,计数平台的油菜苗计数精度最大相差1.87个百分点,具有良好的泛化性,满足油菜苗计数实时性要求。
【总页数】10页(P147-156)【作者】黄小毛;张维;邱天;朱耀宗;徐世兴;李文成【作者单位】华中农业大学工学院;农业农村部长江中下游农业装备重点实验室【正文语种】中文【中图分类】S252【相关文献】1.一种基于无人机视频影像的车流量统计算法2.自动检测拼接线的无人机视频影像快速拼接方法3.基于YOLOv7的无人机影像稻穗计数方法研究4.架空输电线路无人机巡检视频中避雷器计数器目标检测5.基于图优化的无人机视频影像快速拼接技术与应用因版权原因,仅展示原文概要,查看原文内容请购买。
基于图像识别的整精米自动检测
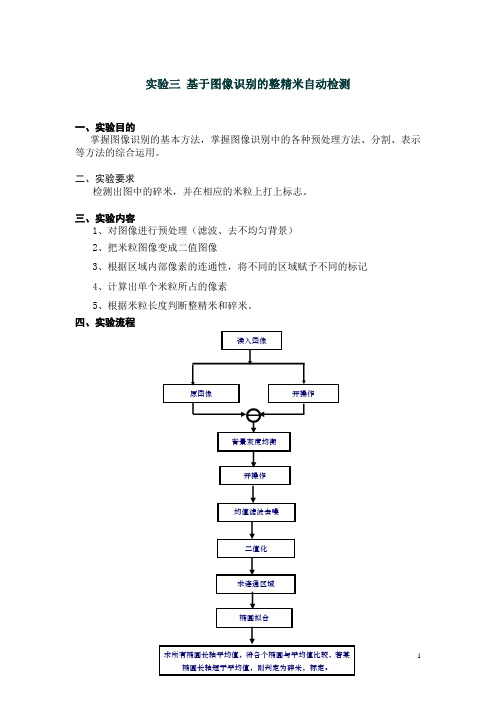
实验三基于图像识别的整精米自动检测一、实验目的掌握图像识别的基本方法,掌握图像识别中的各种预处理方法、分割、表示等方法的综合运用。
二、实验要求检测出图中的碎米,并在相应的米粒上打上标志。
三、实验内容1、对图像进行预处理(滤波、去不均匀背景)2、把米粒图像变成二值图像3、根据区域内部像素的连通性,将不同的区域赋予不同的标记4、计算出单个米粒所占的像素5、根据米粒长度判断整精米和碎米。
四、实验流程五、实验程序close allclearclcA=imread('Fig0926(a)(rice).tif');%读入图片A=im2double(A);%精度转换figure,imshow(A),title('A');%显示原图片se = strel('disk',10);B=imopen(A,se);%对原图片进行开操作figure,imshow(B),title('B');C=A-B;%原图减去开操作后的图片,使背景灰度均衡se = strel('disk',3);C=imopen(C,se);%再一次对实验图片进行开操作,避免各个米粒粘连figure,imshow(C),title('C');h=fspecial('average');D=imfilter(C,h);%对图片进行均值滤波,去除噪声figure,imshow(D),title('D');maxGray=max(D(:));%灰度最大值minGray=min(D(:));%灰度最小值threshold=0.5*(maxGray+minGray);%求出灰度的中值E=(D>threshold);%求出图片的二值化图figure,imshow(E),title('E');[connectedLabel,connectedNum] = bwlabel(E,4);%求出连同区域,以及他们的labelellipse=regionprops(connectedLabel,'all');%对每个连通区域的像素进行椭圆拟合MajorAxisLength=regionprops(connectedLabel,'MajorAxisLength');MajorAxisSum=0;fori=1:connectedNumMajorAxisSum=MajorAxisSum+ellipse(i).MajorAxisLength;endMajorAxisMean = MajorAxisSum/connectedNum;%所有椭圆的长轴平均值figure,imshow(A),title('Result');hold on%检测每一个椭圆,若椭圆的长轴短于所有椭圆长轴的平均值,则认为该椭圆为碎米,并作出标注fori=1:connectedNumif ellipse(i).MajorAxisLength<(MajorAxisMean)centroids = cat(1, ellipse(i).Centroid) ;plot(centroids(:,1), centroids(:,2), 'r*');endendhold off六、实验结果原图开操作后图片原图减去开操作图片均值滤波去噪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定距 离放 置马尾 松种子 , 且朝 向一致 , 以尽量保 证马尾 松发 芽方 向一 致 。蓝色部分则 为种子 的发 芽试纸 , 试 纸事 先浸润在培养 液中 。左端 部分则放置一把直 尺, 用 于每 次测量长度提取 比例尺之用 。 为确保 实验 的可行性 , 遵循对 比原则 , 对种子进行不 同环境 的分组 对 比发芽测试 , 拍 摄 的发芽 图片也应进行分组 。本文通过 对分组 的马 尾 松实施 湿度 、 温度 老化试验 , 将种子按 活力分 为高 、 中、 低 三个档 次, 依 次拍摄从第 6 天 到第 l O 天 的发芽 图像 。 2 . 2操作流程 的设定 本 系统 利用 图像处理技术 , 实现种子发芽长度的辅助测量 , 操作流 程 为打开图像 、 选取 比例尺 、 确定 比例尺 、 选取种子 、 测定长度 。测量 的 操作 流程 如图2:
2 . 图像 的获 取 和 操 作 流 程 的 设定
图2 操作 系统流程 图 实际操作时 , 手工选 定 比例尺 , 利用 图像处理 技术获得 1 厘米 的长 度 在图像 中对应 的像 素点个数 。如图 3 , 将 比例尺 细化 成一条红线 , 比 例 尺数值 显示于文本框 中, 为1 4 8 像素/ 厘米 。在获取 比例尺后 , 选取种 子( 如图4) , 细化种子 ( 如图 5 ) , 并得到长度 , 种 子测 量长度 的部分是从 种 子露白部 分到种 子的末端 的红 色部分 。
0 . 背景
我 国已成 为继 美 国之后 的 全球第 二 大种 子市 场 , 随着 我 国加入 WT O 后 种子市场化 、 产业化 的推进 , 市场 规模已达 5 0 0 多亿 。随着种子 市 场的迅速发 展 , 种 子质量越来越成 为种子经 营和管理 的核心 。种子 发芽 测定 是种子质量检测 的重要手段 之一 , 种子的发展质量 , 包括幼苗 的发芽率 、 生长速度 是评判种子 质量的重要指 标。 因此准 确的测定种 子发 芽率 、 每天的幼苗长度及形态特征 , 有助于精确地评估种子质量。 在多批次测 量过程 中 , 以上指标 的测定都是 由种子检 验员手工进 行 测定 , 繁琐 、 费时 、 主观 因素较大 , 且不 同试验 室间结果 很难 达到一 致, 可重复性 较差 。由于幼苗长度测 量不准确 , 生长速度 、 完整性等无 法进 行定量判断 , 只能进行定性 的判断 , 这些不利的特点 限定 了种 子质 量测 定的广泛应用和标准化 。因此需 要一种客观的 、 可重复 的、 快速 的 并 且经济可靠 的测定方 法 , 近些年 图像处理技 术的飞速发 展为种子质 量测 定的 自 动 化提供 了条件 。本 文研 究 了通过 图像处理技术 , 实现种
科技信息
基 于图像 处理晌种子 发芽长度测量系统硇 设计与实 坝
浙江农林大学 金 涛 刘 颖( 通讯作者) 祁亨年 周瑞慧 邓 飞
[ 摘 要] 种子发 芽试验是种 子质量检 测常 用方 法之一 , 幼苗长度是发 芽试验 的重要 指标 , 传 统的手 工测 量手段会破 坏种子生 长环 境, 采用计算机 图像测量可 以实现在不破坏 生长环境前提 下的精确 测量。本文在研 究发 芽图像 特点的基础上 , 以VC+ + 6 . 0为主要 开 发工具 , 以 Cx I ma g e 为图像 处理 函数 库 , 综合运 用颜 色空间 变化 、 自适应 闽值 、 腐蚀 、 膨胀等图像 处理算法 , 实现 了一个种子幼 苗长度 辅助测量 系统。该 系统可用于种子幼苗长度的每 目 测量 , 为种子质量检测提供 了一种新方 法, 有一定的应用价值和研究价值。 [ 关键 词] 图像处理 辅助测量 幼苗长度
1 . 现状和研 究任务 利用图像处 理技术对种 子发芽试验 的检测 主要集 中于农 业 、 蔬菜 类 种 子, 包 括 对 发 芽 率 和 幼 苗 形 态 尺 寸 的 检 测 。V a n d e rU r e n a R ( 2 0 0 1 ) 完成 了机器 视觉对西红柿 、 小扁 豆等种子 的发 芽 率的 自动检测 。S a k d ( 2 0 0 1 ) 利用平面扫描设 备获取计算机 图像 , 解 析 生菜种子幼 苗的形态特征 。X u ( 2 0 0 7 ) 提出的一种基 于神经 网络 的 算法 , 解 决了棉花幼苗在生长过程中存在的互相叠的问题。 国内的相关 研究起 步较晚并且 应用较 少。张晓宇 ( 2 0 0 5 ) 利用 图 像处 理技术 , 建立苗高与苗像投影 高之间的关系 , 实现 了玉米发芽试验 的苗高和发芽率测 量。 田维 ( 2 0 0 6 ) 等 开发了基于 I S T A标准的 自 动化 种苗 评价系统 ( E S S E ) , 实 现了基于 图像 处理技术 的油菜 种子质量 的评 价 。测量 的数 据 以试验 的最后一 天的测 量数据 为主 , 未对 生长过程 的 数据 做动态的测量 。国内的研究更 多的是机器视觉在植物生长环境 的 监控, 如武 聪玲 ( 2 o o 5 ) , 1 J 用 计算机 视觉技术 对黄瓜幼 苗的无 损监测 、 曾庆兵1 8 1 等( 2 0 0 9 )  ̄ ] 1 用数字形 态学对重叠葡萄果径的无损测量 、 马稚昱1 9 1 ( 2 0 1 0 ) 实现 了基于机器视觉 的菊花生长无损 监测等。这些研究可 以应 用 到本文 的幼苗的长度测量中 , 在技术上有很强的参考价值。 本 文利用数 码相机采集 的发芽 图片数据 , 对 种子发芽 长度进行测 量, 综合运用 滤波去噪 、 细化 、 填充 、 图像 ( 背景 ) 分割等算法 , 提取种子 的骨 架 , 最终测量种子长度 。在此基础上 , 将 种子测量的结果与种子指 标进 行比较 , 测定种子质量。