盾构姿态控制与管片拼装技术(1)
盾构机的姿态控制及纠偏讲解
这将受到设备状况,地质条件和施工操作等 方面原因的影响。当开挖面图提交均匀或软 硬上下相差不大时,保持盾构机轴线与隧道 设计轴线平行较容易。方向偏角应控制在 5mm/m以内,特殊情况下不宜超过10mm/m; 否则,会因盾构急转弯过急造成盾尾间隙过 小破坏盾尾刷和管片错台破裂漏水。
2、当盾构机遇到上硬下软土层时,为防止盾 构机机头下垂,要保持上仰姿态;反之保持 下俯状态。掘进时要注意上下两段及左右两 侧的千斤顶形程差不能相差太大,一般控制 在20mm以内, 特殊情况下不能超过60.mm。
机不能保持正确的姿态,影响管片的拼装质 量。可通过反转刀盘来减小刀盘的滚动角 2)通过应用盾构千斤顶逐步纠正 如果盾构机向右偏,可提高右侧千斤顶的推 力;反之亦然,如果盾构机向下偏,则提高 下部千斤顶的推力;反之亦然。
三、盾构机姿态控制一般细则
1、在一般情况下,盾构机的方向偏差应控制 在20mm/m之内,在缓和曲线段及园曲线段, 盾构机的方向偏差量应控制在30mm/m以内, 曲线半径越小,控制难度越大。
一定量。根据曲线半径不同,偏移量通常取 10-30mm。即盾构机进入缓和曲线和曲线前, 应将盾构机水平位置调整至0mm,右转弯掘 进逐步增加至+20mm,左转弯则调整至20mm。以保证隧道成型后与设计曲线基本 一致。
5、在盾构机姿态控制中,推进油缸的形程控 制是重点。对于1.5米宽的管片,原则上推进 油缸的形程在1700-1800mm之间,形程差控 制在0~50mm之间。形程过大,则盾尾刷容
8、纠偏时要注意盾构机姿态,控制住设计轴 线中心±20mm以内,间隙要均匀平衡。
盾构姿态蛇行变化,主要是通过调整盾构分 区推力来实现的。盾构姿态调整,要在各种 地质情况下推力参数基础上,加大局部推力 或把另外两个或者三个方向的推力降低,来 调整姿态。。
盾构姿态及管片拼装质量控制QC

管片拼装质量分析会
五、原因分析
1、管片错台原因分析 1)盾构姿态较差,盾尾间隙不均匀出现局部过小,管片拼装完成 后再拖出盾尾时,由于盾尾间隙过小,盾尾刷保护块强制将管片向内压 缩,导致管片错台。 2)管片选型不合理,导致盾构机与管片趋势不匹配。 3)管片螺栓未按要求进行复紧,导致管片失圆错台。 4)盾尾本身失圆也是可能导致管片错台的原因之一。
三、现状调查
第 第 第 第 第 第 第 第 第 第 第 第 第
10 11 12 13 14 15 16 17 18 19 20 21 22
环 环 环 环 环 环 环 环 环 环 环 环 环
612 590 473 777 395 420 413 236 475 228 825 111 226
A1 2 A1 2 A1 2 A1 3 A1 2 A1 2 A1 2 A1 2 A1 3 A1 2 A1 3 A1 5 A1 2
六、 要因确认
人员因素 附表6-3
确认三:管片拼装手操作是否符合规范 确认方式 考试加现场拼装考核 标准 考试成绩和现场操作均达标 2013年8月14日,对管片拼装手组织了集体测试,考试平均成绩均在95分 以上,管片拼装准确率达100%。 结论:此项不是主要原因。
机械因素 附表6-4
确认四:管片拼装机存在微调不灵敏的情况 确认方式 标准 现场检查 在人为操作无误的情况下拼装管片是否符合要求
A3 2 A3 3 A3 1 A3 1 A3 1 A3 2 A3 2 A3 3 A3 2 A3 4 A3 3 A3 4 A3 3
A2 A2 A2 A2 A2 A2 A2 A2 A2 A2 A2 A2 A2
5 否 4 否 6 否 4 否 4 否 4 否 5 否 7 否 5 否 8 否 5 否 4 否 5 否 8 裂缝 已修复
浅谈盾构机姿态的控制方法

浅谈盾构机姿态的控制方法
一、简介
盾构机为沉管全封闭式施工机械,具有自动化程度高、施工质量可控、施工速度快和管片拼装精度高等优势,深受广大施工企业的青睐,用于水
利工程、市政工程、油气工程等城市基础设施的管线施工,不仅可以大大
减少施工难度,节省施工时间,还可以提高施工质量和提升施工效率。
但是,控制盾构机姿态是盾构钻机施工中的关键,盾构机控制姿态不准确,
既会影响施工质量,又会严重延误施工进度,甚至出现施工安全事故,因此,控制盾构机姿态是施工质量的重要保障。
1、建立坐标系:首先,应建立一个轨道工程坐标系,可以通过在地
形上标准点测量来建立。
2、采用传感器测量方法:在盾头前设置激光传感器,可以利用它来
测量盾头的垂直位置,并定时发送信号,通过接收系统转换后可以获得盾
头的三维坐标信息,从而可以准确控制盾头的姿态。
3、采用水平仪测量法:在盾头前方设置水平仪,可以实时水平测量,通过控制盾头的角度,从而准确控制盾头的姿态。
4、采用视觉控制方法:同样,可以在盾头前方设置一台摄像头,通
过视觉控制,可以准确控制盾头的姿态。
盾构项目管片拼装技术手册
管片拼装技术手册盾构区间管片拼装技术手册一、设计标准地铁设计标准:1、地铁主体结构设计使用年限为100年;2、区间隧道防水等级为二级;3、混凝土允许裂缝开展,管片最大允许裂缝宽度为0.2mm,并不得有贯穿裂缝;4、管片混凝土强度等级C50,抗渗等级为P12。
管片设计标准:衬砌环构造:管片外径6000mm,内径5400mm。
管片幅宽:线路曲线半径大于等于400mm时,采用1500mm宽管片,线路半径小于400mm时,采用1200mm的管片。
管片厚度300mm。
每环衬砌环由6块管片组成,1块封顶块,2块邻接块,3块标准块。
采用直线+左右楔形环拟合不同曲线。
成都地铁采用的楔形环为双面楔形,单面楔形量为19mm,转角为0.1814°,整环楔形总量为38mm,转角为0.363°。
管片连接:衬砌环纵、环缝采用弯螺栓连接,对于1500mm和1200mm管片,每环纵缝采用12根M27螺栓,每个环缝采用10根M27螺栓。
二、管片选型分析原则:确保管片的走向符合隧道设计线路,且拼装后的管片质量符合规范和设计要求。
依据:1.线路参数。
2.盾构机姿态与油缸行程差。
3.盾尾间隙。
拼装点位:管片拼装点位表示每一环管片中封顶块所在的位置。
根据成都地铁管片设计构造特点,管片拼装分为10个点位。
拼装点位分布如右图所示。
拼装点位的选取原则:1.相邻环管片不通缝。
2.楔形环不同楔形量使用合理,有利于调整盾尾间隙、油缸行程差和拟合隧道中心线。
拼装点位选择:现为了保证隧道的美观和防水效果,将管片的点位划分为两类:上半区点位(1点、2点、3点、9点、10点、11点),下半区点位(4点、5点、7点、8点)。
其中上半区点位位于隧道中线以上(含中线),有利于管片拼装和隧道的防水质量,因此上半区作为管片点位选择的主要区域。
管片楔形量:成都地铁采用的左右转弯楔形环为等腰梯型,该类型的管片需要两次可达到调整方向的目的,纠偏量比较小,有利于盾构机掘进中的方向控制。
盾构机管片拼装安全技术措施

盾构机管片拼装安全技术措施
1、管片拼装必须落实专人负责指挥,拼装机操作人员必须按照指挥人员的指令操作,严禁擅自转动拼装机,以免发生伤亡事故。
2、举重臂旋转时,必须鸣号警示,严禁施工人员进入举重臂活动半径内,拼装工在管片全部定位后,方可作业。
在施工人员未能撤离施工区域时,严禁启动拼装机。
3、拼装管片时,拼装工必须站在安全可靠的位置,严禁将手脚放在环缝和千斤顶的顶部,以防受到意外伤害。
4、举重臂必须在管片固定就位后,方可复位,封顶拼装就位未完毕时,人员严禁进入封顶块的下方。
5、举重臂拼装头子必须拧紧到位,不得松动,发现磨损情况,及时更换,不得冒险吊运。
6、管片在旋转上升之前,必须用举重臂小脚将管片固定,以防管片在旋转过程中晃动。
7、当拼装头子与管片预埋孔不能紧固连接时,必须制作专用的拼装架。
拼装架设计必须经技术部门认可,经过试验合格后方可使用。
8、拼装管片必须使用专用的拼装销子,拼装销必须有限位。
9、拼装上部管片时,必须使用专用的移动式防护栏,以防高空坠落。
人员穿越防护栏杆作业时,必须佩带安全带。
10、单轨梁(双轨梁)运送管片就位拼装时,人员严禁站立在管片的前方,以防止管片溜滑伤人。
管片拼装施工方法与技术措施

管片拼装施工方法与技术措施1)管片拼装施工流程管片拼装施工工艺流程详见下图。
管片止水条及衬垫粘贴管片运输组织及下井管片吊机卸车、倒运管片管片安装区清理管片安装与连接管片脱离盾尾后的二次紧固缩回安装部位油缸管片安装就位掘进1.5m 或1.2m盾构掘进管片安装施工准备推进缸顶紧就位管片管片拼装施工流程2)施工方法及要点管片拼装施工方法及要点详见下表。
管片拼装施工方法及要点序号 施工工序 施工方法及要点 示意图1 管片进台车 列车编组将管片输送至管片吊机位置。
序号施工工序施工方法及要点示意图2 管片吊装(1)管片吊机将管片输送至拼装机区域(喂片机上)。
(2)吊装阶段路径不得站人或放置设备。
3 管片清洗成环管片拼装前需清洗干净,确保拼装结合处无异物夹杂,影响拼装质量。
/4 管片拼装(1)拼装前检查止水条是否粘贴牢固并对拼装区清理。
(2)所有推进油缸行程伸出的长度都大于管片长度300mm时,进行管片拼装,相邻两环采用错缝拼装。
(3)拼装机将管片依次拼装形成整环支护。
(4)先拼装底部大块,在依次拼装腰部管片,最后拼装封顶块。
管片拼装易出现环面不平整、纵缝质量不符合要求等质量通病,其主要预防技术措施详见下表。
管片拼装施工质量通病及预防技术措施序号质量通病技术措施1 环面不平整(1)拼装前检测前一环管片的环面情况,决定本环拼装时纠偏量及纠偏措施。
(2)清除环面和盾尾内的各种杂物。
(3)控制千斤顶顶力均匀。
(4)提高纠偏楔子的粘贴质量。
(5)检查止水条的粘贴情况,保证止水条粘贴可靠。
(6)盾构推进时骑缝千斤顶应开启,保证环面平整。
(7)对于已形成环面不平的管片,在下一环及时加贴楔子纠正环面,使环面平整。
2 管片环面与隧道设计轴线不垂直(1)拼装时做好清理工作,防止杂物夹杂在管片环缝间。
(2)尽量多开启千斤顶,使盾构纠偏的力变化均匀。
(3)在施工中经常测量管片环面的垂直度,并与轴线相比较,发现误差,及早安排制作楔子纠环面。
盾构法隧道管片选型及拼装技术
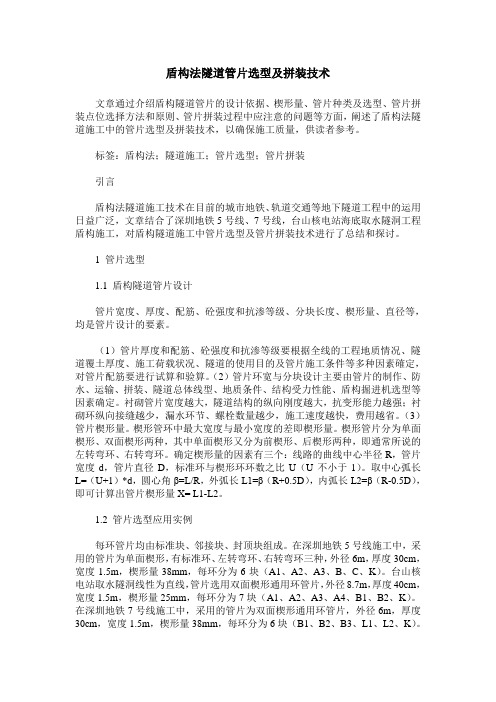
盾构法隧道管片选型及拼装技术文章通过介绍盾构隧道管片的设计依据、楔形量、管片种类及选型、管片拼装点位选择方法和原则、管片拼装过程中应注意的问题等方面,阐述了盾构法隧道施工中的管片选型及拼装技术,以确保施工质量,供读者参考。
标签:盾构法;隧道施工;管片选型;管片拼装引言盾构法隧道施工技术在目前的城市地铁、轨道交通等地下隧道工程中的运用日益广泛,文章结合了深圳地铁5号线、7号线,台山核电站海底取水隧洞工程盾构施工,对盾构隧道施工中管片选型及管片拼装技术进行了总结和探讨。
1 管片选型1.1 盾构隧道管片设计管片宽度、厚度、配筋、砼强度和抗渗等级、分块长度、楔形量、直径等,均是管片设计的要素。
(1)管片厚度和配筋、砼强度和抗渗等级要根据全线的工程地质情况、隧道覆土厚度、施工荷载状况、隧道的使用目的及管片施工条件等多种因素確定,对管片配筋要进行试算和验算。
(2)管片环宽与分块设计主要由管片的制作、防水、运输、拼装、隧道总体线型、地质条件、结构受力性能、盾构掘进机选型等因素确定。
衬砌管片宽度越大,隧道结构的纵向刚度越大,抗变形能力越强;衬砌环纵向接缝越少,漏水环节、螺栓数量越少,施工速度越快,费用越省。
(3)管片楔形量。
楔形管环中最大宽度与最小宽度的差即楔形量。
楔形管片分为单面楔形、双面楔形两种,其中单面楔形又分为前楔形、后楔形两种,即通常所说的左转弯环、右转弯环。
确定楔形量的因素有三个:线路的曲线中心半径R,管片宽度d,管片直径D,标准环与楔形环环数之比U(U不小于1)。
取中心弧长L=(U+1)*d,圆心角β=L/R,外弧长L1=β(R+0.5D),内弧长L2=β(R-0.5D),即可计算出管片楔形量X= L1-L2。
1.2 管片选型应用实例每环管片均由标准块、邻接块、封顶块组成。
在深圳地铁5号线施工中,采用的管片为单面楔形,有标准环、左转弯环、右转弯环三种,外径6m,厚度30cm,宽度1.5m,楔形量38mm,每环分为6块(A1、A2、A3、B、C、K)。
盾构管片拼装模式说明书(操作手)

PPS 管片拼装程序使用的简要说明(盾构操作手使用)
PPS 拼装程序简要操作说明(盾构机操作手)
1. 简要导向信息说明
显示为(measurement OK ),测量完成状态,只有此时状态为最真实可信的。
并且只有在时状态下才可以起动管片拼装程序。
刀盘切口,中盾尾,尾盾里程
偏航角或趋势角
机器三维视图,前端蓝圆为刀盘,后部大红圆为盾尾。
刀盘切口,中盾尾,尾盾的水平偏差
2. 拼装程序使用。
PPS管片拼装模式打开的前提是导向测量显示完成状态。
(左下角为绿色,且显示测量完成),在测量(Survey)菜单下,开始“管片拼装(start ring build)”,拼装模式打开后,如图所示。
此时要认真量取,并输入盾尾间隙,才可以使管片计算程序正常工作。
3. 拼装程序计算结果的显示
对于管片的计算要求可以在主界面,设置菜单下的管片拼装设置选项中更改。
4. 拼装完成后的工作
上述,按“开始拼状”键,即进入此界面,在拼装完成后,可以重新读取铰接的行程量,然后再次输入当前的盾尾间隙,(共两次)此时可以更改环号,与拼装点位,工作完成后,按“保存”SA VE 键,返回推进测量模式,管片的所有拼装信息,将会被记录,且无法更改。
再次输入盾尾间隙
5.管片拼状记录的查看
在主界面的“数据库(Database)”菜单下的“管片报告”ring report里可以查看以往的所有管片拼状记录。
此记录里可以显示与此环管片拼装相关的所有信息,可以打印作为施工日志或备案报告使用。
可以直接在办公室的电脑里打印,也可以在PPS机器电脑中打印成PDF格式,再拷出打印保存。
盾构法隧道施工工法及管片拼装技术[详细]
![盾构法隧道施工工法及管片拼装技术[详细]](https://img.taocdn.com/s3/m/f51c19697f1922791688e8bd.png)
1、盾构法隧道基本概念
盾构法是在盾构保护下修筑隧道的一类施工方法, 这类方法的特点是地层掘进、出土运输、衬砌拼装、 接缝防水和盾尾间隙注浆充填等作业都在盾构保护 下进行,并需随时排除地下水和控制地面沉降,因而 是工艺技术要求高、综合性强的一类施工方法,
盾构机(复合盾构土压平衡)
◢井下安装盾构(始发井) 盾构推进进洞(接收井)◣
(2)同步注浆和壁后注浆设备
盾尾建筑空隙 = 盾构外径 - 隧道外径 充填盾尾空隙的方法: 1) 同步注浆:在盾构尾部外壳上设2~6根同步
注浆管, 在盾构推进的同时进行注浆充 填空隙 2) 壁后注浆:在管片上留有注浆孔,随时可进 行壁后注浆
盾尾同步注浆管和壁后注浆孔示意图
掘进方向
图8.8-1 盾构管片错缝安装布置展开示意图
◢高精度钢筋 混凝土管片
管片堆放及 防水条、衬垫◣
管片吊运下井◣ ◢管片水平运输
◢管片试拼装 隧道拼装作业◣
3、 盾构掘进施工的竖井和配套设备
(1)盾构掘进施工的竖井 始发工作井:
满足盾构掘进机安装和出洞施工的要求 接收工作井:
盾构隧道掘进完成后进入接收井,满足盾 构拆卸或转场吊装移位的工作空间要求 竖井施工方法: 沉井法、地下连续墙围护、钢板桩围护,
3)洞门密封及止水装置的安装 洞口密封采用右图所示的折叶 式密封压板,其施工分两步进行 施工,第一步在始发端墙施工过 程中,做好始发洞门预埋件的埋 设工作,在埋设过程中预埋件与 端墙结构钢筋连接在一起,第二 步在盾构正式始发之前,清理完 洞口的碴土后及时安装洞口密 封压板及橡胶帘布板,
(4)负环管片安装
盾构机掘进操作
管片洞内运输
管片拼装
螺旋输送机出土
盾构始发及管片拼装安全操作规程

盾构始发及管片拼装作业安全操作规程进入施工现场必须戴好安全帽,正确使用劳保用品,高处临边作业,必须佩戴安全绳,在有限空间内严禁违章操作业。
1、盾构始发及操作(1)凡从事盾构机操作及辅助生产的人员应执行国家、行业现行的安全技术规程。
遵守项目部的安全管理规定,严禁违章操作。
(2)盾构机内的施工人员应具有较强的责任心,且必须经过相关的专业培训,并取得相关岗位的上岗证书后方可上岗。
(3)盾构机内所有区域工作的人员:①必须正确佩戴安全帽(不包括控制室内)。
②统一穿着工作服,衣服的袖口和裤脚必须扎紧。
禁止使用尼龙、化纤或混纺的衣料制作的工作服。
工作人员进入生产现场禁止赤脚、穿拖鞋、凉鞋、高跟鞋、短裤。
③在土舱等特殊环境工作的人员须配备防护装备,并设有专人监护。
(如防护镜、呼吸器具等)。
2、按始发技术方案进行操作,保证始发安全。
3、盾构始发时必须做好盾构机防扭转和基座稳定措施,并对盾构姿态作复核、检查。
4、负环管片定位时,管片横断面中线应与线路中线一直。
5、在始发阶段应控制盾构机推进的初始推力,初始推力应根据技术交底方案实施,并注意观察反力架结构情况。
6、根据隧道地质状况、埋深、地表环境、盾构姿态、施工监测结果制定当班盾构掘进施工指令,并准备好管片拼装、壁后注浆工作。
应做到注浆与掘进的同步进行,及时根据信息反馈情况调整注浆参数。
7、严格按照盾构设备操作规程、安全操作规程以及当班的掘进指令控制盾构掘进参数与盾构姿态。
8、掘进中应设专人按规定进行监控量测,并及时向监控室反馈监测情况。
9、盾构过程中应按有关规定进行盾构与管片姿态人工复核测量、跟踪与信息反馈。
10、施工过程中,应尽量防止盾构机横向偏差、纵向偏差和转动偏差的发生,用测量数据修正盾构姿态,尽早进行“蛇行”修正。
11、盾构机体前端两侧及机尾不得站人。
电机车运行前后轨道两端头必须设置铁鞋和阻车器,以防止发生电瓶车突发遛车伤人事故。
12、盾构暂停施工时,应按稳定开挖面的专项措施执行。
盾构管片安装质量问题原因分析及控制措施

第二章 管片质量原因分析
3、管片破损控制措施 (1)在搬运过程中轻吊慢放,着地时要平稳;堆放时不宜超
过4层,并正确摆放垫木。吊放管片不得使用钢丝绳,应采用吊装 带吊装。选择、摆放好垫木,在管片车上管片搁置部位设置橡胶 条,以起到缓冲作用。按要求贴好角部止水橡胶条、传力衬垫、 橡胶板。
(2)拼装前,先测量前一环各管片之间的相互高差,包括环 向和径向。拼装前清理上一环管片上的泥块及泥浆,保证环面清 洁,无加泥。拼装时保证初衬砌环圆度,块与块不错位。推进油 缸的伸顺序应与管片拼装顺序一致。管片拼装过程中切忌野蛮操 作,强行插入和敲打。
(2)管片受到地基回弹作用。盾构机的重量主要集中在前盾,由盾 尾至后配套台车一段衬砌基本无压载,管片脱出盾构后失去了约束,同 时还受到周围土层的作用。土层可能对管片产生压力,也可能盾构出土 造成地基卸载,地基回弹导致土层对管片产生浮力。
(3)施工中盾构推进千斤顶造成的管片纵向偏心载荷,致使管片纵 向发生的弯曲变形,从而可能导致管片上浮。
第二章 管片质量原因分析
3、管片渗漏水控制措施
(1)管片质量控制 (2)注浆控制 (3)掘进控制
以上控制方法前面已经详述,这里不再赘述。
第二章 管片质量原因分析
五、造成管片质量问题的其他原因 1、管片生产运输及吊装
管片进场验收是管片质量控制的第一步,主要包括管片尺寸检查和管片 外观检查两部分。管片吊装过程中必须使用吊装带进行吊装;堆放时管片应 内弧面向上平稳地堆放整齐,管片下及管片之间应垫有柔性材料,垫条应对 称放置,使管片间无碰撞,堆放高度不得超过四层。
(3)拼装后:同步注浆后,隧道上部的浆液会逐渐向下部流 动,形成下部浆液多而上部浆液少的状况,引起管片上浮,上部 管片与盾构机内壳间隙减少,推进时造成管片破碎。管片姿态还 未完全稳定前,当二次注浆压力不均匀时,会使部分管片产生位 移,位移管片与未发生位移的管片相互挤压会形成应力集中,容 易产生环向破碎现象。
地铁盾构管片拼装技术

管片选型
之二:选型正确的判断标准
管片选型合理正确主要体现在以下几个方面: A)隧道轴线偏差很小,管片拼装的外观质量很好。 B)上下左右的盾尾间隙比较均匀。 C)推进千斤顶的行程差较小。
管片选型
之三:根据线路特点管片预排版
转弯环偏转角: θ=2γ=2arctgδ/D
线路曲线圆心角: α=180L/πR θ=α,将曲线半径R代
10.1 管片的拼装点位
转弯环在实际拼装过程中,可以根据不同的拼装点位来控制不同方向 上的偏移量。这里所说的拼装点位是管片拼装时K块所在的位置。管 片拼装点位为在圆周上均匀分成10个点,即管片拼装的10个点位,相 邻点位的旋转角度为36度。由于是错缝拼装,所以相邻两块管片的点 位不能相差2的整数倍。一般情况下,本着有利于隧道防水的要求, 都只使用上部5个点位。根据工程实际情况,选择拼装不同点位的转 弯环,就可以得到不同方向的楔形量(如左、右、上、下等)。下面 是管片左转弯环不同点位的楔形量计算表:
在对这环管片进行选型的时候,就应选择一环左转弯环且还要 有向上的偏移量。对照表1后得出,此环应选择左转弯环在1点 拼装。拼装完管片后掘进之前油缸行程的初始数据理论为:A 组(上):454mm B组(右):465mm C组(下):453m D组(左):450mm。这样左右与上下的油缸行程差值基本控 制在20mm之内,有利于盾构掘进及保护管片不受破坏。(如 果上述数据在左转弯曲线上,下一环管片仍安装一环左转弯环 管片,那么盾构姿态基本调整过来)。
左转弯环盾尾间隙调整量表
பைடு நூலகம்表2
点位
15点
14点
16点
13点
1点
12点
2点
盾尾间隙测量 结果
向左调整量 向右调整量 向上调整量 向下调整量
盾构管片拼装

地铁盾构管片拼装通过1号车架的单轨梁、盾构与车架之间的双轨梁以及拼装机后部的喂片机构将管片从运送小车装运到拼装机下进行拼装。
管片拼装机型式为环齿式,可按顺时针和逆时针旋转220度,其轴向平移行程达800mm,以保证封顶块的嵌入。
拼装机工作时由无线遥控器控制,为防止无线系统损坏,另备有一套线连接的悬挂式控制器。
一、衬砌拼装方式1、隧道衬砌由六块预制钢筋混凝土管片组成,采用通缝拼装。
其中拱底块最重为3.75T,整环总重16.1T。
成环形式为小封顶纵向全插入式。
2、纵环向均采用M30双头直螺栓连接,环向螺栓每环12只,纵向螺栓每环17只。
连接件采用锌基铬酸盐涂层防锈处理,涂层厚度为6mm。
纵环向螺栓机机械性能等级为5.8级。
二、拼装前的准备工作(1)钢筋混凝土管片应验收合格后方可运至工地,管片在地面上按编号拼装顺序排列堆放,粘贴好管片接缝密封衬垫等防水材料, 管片接缝的连接件和配件、防水垫圈等的数量规格准备齐全,随管片运送至工作面。
(2)清除前一环管片环面和盾尾内杂物,检查前一环管片环面防水材料是否完好,如有损坏应及时采取修补措施,发现环面质量问题,必要时在新一环管片拼装时采用纠正措施。
(3)按有关盾构设备操作要求,全面检查拼装系统管片拼装机的动力及液压设备是否正常,确保拼装作业安全可靠。
三、拼装作业(1)将衬砌环拼装顺序列表提供给竖井工程师、盾构掘进机的操作者等;(2)钢筋混凝土管片拼装中,应保持盾构稳定状态,并防止盾构后退和已砌管片受损。
举重钳钳牢管片操作过程中,施工人员应退出管片拼装范围。
(3)钢筋混凝土管片拼装时应先就位底部管片,然后自下而上左右交叉安装,每环相邻管片应均布摆匀并控制环面平整度和封口尺寸,然后插入封顶管片成环。
(4)钢筋混凝土管片拼装成环时,其连接螺栓应先逐片初步拧紧,脱出盾尾后再次拧紧。
当后续盾构掘进至每环管片拼装之前,应对相邻已成环的3环范围内管片螺栓进行全面检查并复紧。
(5)拼装过程中选定各块管片位置,须缩回相应的千斤顶,形成管片拼装空间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盾构姿态控制与管片拼装技术盾构姿态控制与管片拼装相互影响,相互制约的两个过程。
盾构姿态控制与管片拼装应以隧道设计轴线控制为目标,同时两者相互协调,保证管片拼装质量,避免管片产生破损。
盾构的姿态控制是盾构施工中的一个重要环节。
盾构姿态控制的基本原则:以隧道设计轴线为目标,偏差控制在设计范围内,同时在掘进过程进行盾构姿态调整确保不破坏管片。
盾构推进过程中,依靠千斤顶不断向前推进,为便于轴线控制,将千斤顶设置分成不同区域。
在切口水压正确设定的前提下,应严格控制各区域油压,同时控制千斤顶的行程,合理纠偏,做到勤纠,减小单次纠偏量,实现盾构沿设计轴线方向推进。
设计轴线控制范围:平面控制: 100mm,高程控制:-100mm。
本工程采用通用楔形管片作为隧道衬砌。
其不同的旋转位置,将产生不同的上、下、左、右超前量,通过不同位置管片的拼装,实现对隧道轴线的拟合。
因此拼装前管片的选型至关重要。
选择正确的管片旋转角度,能保证拼装工作的顺利进行提高拼装质量,保证构筑隧道符合设计轴线。
另外,盾构推进施工中,成环管片作为盾构推进后座,对盾构推进起到一种导向作用。
为此,在盾构推进尤其是曲线推进时,应通过严格的计算和量测来确定管片的超前量。
同时应用盾构本身PPS系统综合系统,合理选取管片旋转位置,以达到管片相应的超前量,使管片环面始终垂直于设计轴线。
1.盾构姿态控制与管片拼装的基本原则1.1直线段施工直线段施工最理想的状态是隧道设计中线与盾构轴线管片中线重合。
但实际施工情况,三条线之间存在偏差。
下面分几种基本情况进行讨论:(1)三条线基本重合:理论上,管片拼装时K块可以交替放在圆心对称的位置。
但是,为了保证拼装精度,应避免K出现隧道下部。
最好 K块交替放°与270°位置。
K块在右侧,左右油缸行程差25mm,K块在左侧,左右油缸行程差-25mm。
(2)盾构轴线与隧道轴线重合假设管片端面与隧道设计轴线的垂直面存在夹角θ,最不利的情况是两平面在水平面上的投影夹角为θ(顺时针为正)。
此时管片一侧超前Dθ,为保持盾构姿态不变,油缸行程差为Dθ。
通过下环管片拼装,纠正管片轴线,并尽量与盾构轴线一致。
因此,应经常测量管片端面情况。
(3)管片轴线与隧道设计轴线重合(这种情况不好判断)1)假设管片拼装后,盾构机轴线与隧道设计轴线存在夹角为θ,这时在盾尾间隙允许的情况下,一般应保证管片与设计轴线一致,同样通过调整油缸行程调整盾构姿态。
(4)管片中心与盾构中心的有偏差由于盾构机的平行移动.管片与盾构机的关系如图1所示。
图1 盾构与管片轴线偏差示意图假设管片与盾构不失圆,管片与盾尾的上下左右间隙值δt 、δb 、δr 、δl可在现场测得,管片中心(O g )与盾构机盾构平行移动示意图中心(O d )的偏差 δv 、δh ,如图1所示。
则可用以下公式计算:2h 2v min 40δδδ+-=因δmin >0,故尽管盾尾前部与尾端存在间隙,但如δv 2+δh 2>1600时,管片与盾构机的尾部就有可能相接触。
实际情况管片拼装后为椭圆形,如图2所示。
如果椭圆度为4%,管片水平方向直径至少增加22mm 。
相应一侧盾尾间隙减小11mm 。
此时最小盾尾间隙为:2h 2v min 29δδδ+-=。
图2 管片失圆示意图如果上述情况发生在管片拼装前,管片K块设在间隙大的一侧,使管片中心向盾构中心移动;如果上述情况发生在管片拼装后,如果盾构轴线与管片轴线位于隧道设计轴线一侧,盾构最好沿原来的方向掘进,然后通过下一环管片进行调整,或调整盾构轴线远离隧道设计轴线。
如果盾构轴线与管片轴线位于隧道设计轴线两侧,调整盾构姿态,使盾构中心向管片中心移动。
(5)三条轴线不重合而且轴线水平移动通常施工过程中,经常产生上述复杂情况,此时盾构姿态调整应综合考虑掘进方向,同时避免损坏管片,管片选型应考虑隧道设计轴线并与盾构姿态相适应。
逐步调整盾构掘进方向。
盾构机长度盾构机长度图3盾构机位置预测方法A.盾构姿态调整:(1)偏移量计算:管片拼装后,盾构推进2m,对应的角度变化为θ,则对应计划线性的偏移量的计算由图3所示,δ按下式计算:()/2)Lsin()cos1(R)2/sin(L67.112p1p2t0h0121θθδθδδδδδδδδ∆=-⋅=⋅+=⋅-=+=式中:δ1——盾构沿设计方向前进引起的变位量;δ2——方向修正的变位量;δh0——刀盘初始偏差量;δt0——盾尾初始偏差量;δp——盾构旋转引起的偏差量;△L——盾构掘进长度;L ——盾构长度;L 1——管片拼装结束油缸撑靴之前的盾构长度; L 2——管片拼装结束油缸撑靴之后的盾构长度; R ——盾构选择角度;θ——计划盾构轴线变化角度(最大为(δh0-δt0)/L )。
(2)油缸行程差计算盾构推进ΔLm ,对应的角度变化为θ,油缸行程差计算如图4所示。
计算公式如下:θθ2RL22D -R S 2D R S S 0201=∆==+∆-初由上式得:初终S 2D S S S 021∆+=-=∆θ式中:△S 终——掘进ΔL 时油缸行程差; S 1终——掘进ΔL 时油缸行程; S 2终——掘进ΔL 时油缸行程; D 0——油缸间距;θ——计划转动角度;ΔS 初——初始油缸行程(=S 1初- S 2初)B 使管片1.2 曲线段施工曲线段盾构施工的基本原则是盾构轴线与管片轴线始终沿曲线割线方向,如图5所示。
隧道轴线从直线变化到圆曲线时,盾构从圆直点开始掘进L ,首先偏转θ/2,然后管片轴线偏转θ/2,之后在圆曲线上,由于盾构掘进始终超前管片拼装,盾构掘进一个循环(管片宽度L =2m),盾构轴线与管片轴线偏转角度θ从0变化到θ(θ=2/R )。
因此,曲线段掘进,管片与盾尾需要一个最小的盾尾间隙。
隧道轴线从圆曲线变化到直线,盾构从圆直点开始掘进L ,首先偏转θ/2,然后管片轴线偏转θ/2。
1.2.1 最小盾尾间隙的计算 (1)曲线施工和蛇形修正时必须的最小盾尾间隙(最小曲线半径800m ),如图6所示。
图6 曲线施工和方向矫正时间隙5mm 005m .0)5.5800(44)/2D R (4l 2/)cos 1)(2/D R (x 2020==-=-≈--=βR ——隧道曲线半径;D 0——管片外径; L ——盾尾长度。
(2)盾构掘进过程中盾尾间隙的变化假设盾构始终沿设计轴线的割线前进,油缸撑靴位置始终位于设计轴线上。
盾构机掘进2m ,盾构机旋转的角度2/R ,如图7所示。
此时盾尾与管片中线距离变化为:5mm 005m .0)24(8002)2L (8002s ==-⨯=-⨯=∆ 图5 盾构曲线段掘进示意图θθθLθ1.2.2 管片拼装超前量计算本工程最小曲线半径800m ,管片拟合曲线需要的理论超前量计算如图7所示。
图7管片外弧面楔形量计算简图5mm .270275m .0800211R L D L ==⨯=⋅=∆。
1.2.3 盾构姿态控制与管片拼装控制标准根据武汉长江隧道工程设计轴线控制标准、盾构机设计参数(盾构机长度、盾尾间隙等)制定盾构姿态控制与管片拼装标准。
表1 管片拼装质量控制标准表2 盾构姿态控制标准2. 盾构姿态控制技术2.1 盾构掘进方向控制方法(1)采用PPS 隧道自动导向系统和人工测量辅助进行盾构姿态监测 该系统配置了导向、自动定位、掘进程序软件和显示器等,能够全天候在盾构机主控室动态显示盾构机当前位置与隧道设计轴线的偏差以及趋势。
据此调整控制盾构机掘进方向,使其始终保持在允许的偏差范围内。
随着盾构推进导向系统后视基准点需要前移,必须通过人工测量来进行精确定位,为保证推进方向的准确可靠性,拟每周进行两次人工测量,以校核自动导向系统的测量数据并复核盾构机的位置、姿态,确保盾构掘进方向的正确。
(2)采用分区操作盾构机推进油缸控制盾构掘进方向根据线路条件所做的分段轴线拟合控制计划、导向系统反映的盾构姿态信息,结合隧道地层情况,通过分区操作盾构机的推进油缸来控制掘进方向。
在上坡段掘进时,适当加大盾构机下部油缸的推力;在下坡段掘进时则适当加大上部油缸的推力;在左转弯曲线段掘进时,则适当加大右侧油缸推力;在右转弯曲线掘进时,则适当加大左侧油缸的推力;在直线平坡段掘进时,则应尽量使所有油缸的推力保持一致。
在均匀的地质条件时,保持所有油缸推力一致;在软硬不均的地层中掘进时,则应根据不同地层在断面的具体分布情况,遵循硬地层一侧推进油缸的推力适当加大,软地层一侧油缸的推力适当减小的原则来操作。
2.2盾构掘进姿态调整与纠偏在实际施工中,由于地质突变等原因盾构机推进方向可能会偏离设计轴线并达到管理警戒值;在稳定地层中掘进,因地层提供的滚动阻力小,可能会产生盾体滚动偏差;在线路变坡段或急弯段掘进,有可能产生较大的偏差。
因此应及时调整盾构机姿态、纠正偏差。
参照上述方法分区操作推进油缸来调整盾构机姿态,纠正偏差,将盾构机的方向控制调整到符合要求的范围内。
(1)滚动纠偏当滚动超限时,盾构机会自动报警,此时应采用盾构刀盘反转的方法纠正滚动偏差。
允许滚动偏差≤1.5º,当超过1.5º时,盾构机报警,提示操纵者必须切换刀盘旋转方向,进行反转纠偏。
(2)竖直方向纠偏与水平方向纠偏控制盾构机方向的主要因素是千斤顶的单侧推力,当盾构机出现下俯时,可加大下侧千斤顶的推力,当盾构机出现上仰时,可加大上侧千斤顶的推力来进行纠偏。
盾构纠偏的基本原则是盾构与设计轴线水平与竖向偏差控制在75mm(设计容许偏差100mm)以内为目标,避免纠偏过猛,保证管片拼装所需的最小盾尾间隙(初步定10mm),每环的最大纠偏量不大与9.0mm。
(3)盾构上下倾斜与水平倾斜盾构掘进过程中可能存在盾构机轴线与隧道设计轴线方向的偏差,为了保持盾构良好姿态,避免管片的受力不均,盾构上下倾斜与水平倾斜应控制在2%以内。
避免因管片衬砌环的中心和盾构机的中心有偏移,使管片局部受力过大引起管片破损。
2.3方向控制及纠偏注意事项(1)在切换刀盘转动方向时,应保留适当的时间间隔,推进油缸油压的调整不宜过快、过大,切换速度过快可能造成管片受力状态突变,而使管片损坏。
(2)根据掌子面地层情况应及时调整掘进参数,调整掘进方向时应设置警戒值与限制值。
达到警戒值时就应该实行纠偏程序。
(3)蛇行的修正应以长距离慢慢修正为原则,如修正得过急,蛇行反而更加明显。
在直线推进的情况下,应选取盾构当前所在位置点与设计线上远方的一点作一直线,然后再以这条线为新的基准进行线形管理。
在曲线推进的情况下,应使用使盾构当前所在位置点与远方点的连线同设计曲线相切。
(4)正确进行管片选型,确保拼装质量与精度。
(5)严格控制纠偏力度,防止盾构机发生卡壳现象。