位置式PID控制原理分享培训资料
PID控制经典培训教程

PID控制经典培训教程一、引言PID控制是自动控制领域最经典、应用最广泛的一种控制策略。
PID控制器因其结构简单、稳定性好、可靠性高、易于调整等优点,在工业控制、航空航天、技术等领域有着广泛的应用。
本教程旨在帮助读者深入理解PID控制原理,掌握PID控制器的设计、参数调整和应用技巧。
二、PID控制原理PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个环节组成,其基本原理是根据控制对象的实际输出与期望输出之间的误差,对控制对象进行相应的调节。
1.比例控制(P)比例控制是根据误差的大小进行调节,其控制作用与误差成正比。
比例控制可以减小误差,提高系统的响应速度。
但比例控制无法消除稳态误差,可能导致系统在期望值附近波动。
2.积分控制(I)积分控制是对误差的累积进行调节,其控制作用与误差的累积成正比。
积分控制可以消除稳态误差,提高系统的稳态性能。
但积分控制可能导致系统的超调量和响应速度降低。
3.微分控制(D)微分控制是对误差的变化率进行调节,其控制作用与误差的变化率成正比。
微分控制可以提高系统的稳定性和响应速度,减小超调量。
但微分控制对噪声敏感,可能导致系统在期望值附近波动。
三、PID控制器的设计与参数调整1.确定控制对象和控制目标在设计PID控制器之前,要明确控制对象和控制目标。
控制对象是指需要进行控制的物理量,如温度、压力、位置等。
控制目标是指期望的控制对象达到的值或状态。
2.选择PID控制器类型根据控制对象的特点和控制目标的要求,选择合适的PID控制器类型。
常见的PID控制器类型有:(1)P控制器:适用于控制对象无稳态误差或稳态误差较小的情况。
(2)PI控制器:适用于控制对象有稳态误差,且对响应速度要求较高的情况。
(3)PD控制器:适用于控制对象有稳态误差,且对超调量要求较低的情况。
(4)PID控制器:适用于控制对象有稳态误差,且对超调量和响应速度都有一定要求的情况。
PID控制经典培训教程

PID控制§ 1 PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论与智能控制理论三个阶段。
自动控制系统可分为开环控制系统与闭环控制系统。
一个控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构,加到被控系统上;控制系统的被控量,经过传感器,变送器,通过输入接口送到控制器。
不同的控制系统,其传感器﹑变送器﹑执行机构就是不一样的。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器,其中PID控制器参数的自动调整就是通过智能化调整或自校正、自适应算法来实现。
有利用PID控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现PID控制的PC系统等等。
1、1 开环控制系统开环控制系统就是指被控对象的输出(被控制量)对控制器的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
1、2 闭环控制系统闭环控制系统的特点就是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈与负反馈,若反馈信号与系统给定值信号相反,则称为负反馈,若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称负反馈控制系统。
1、3 阶跃响应阶跃响应就是指将一个阶跃输入加到系统上时,系统的输出。
稳态误差就是指系统的响应进入稳态后,系统的期望输出与实际输出之差。
控制系统的性能可以用稳、准、快三个字来描述。
稳就是指系统的稳定性, 一个系统要能正常工作,首先必须就是稳定的,从阶跃响应上瞧应该就是收敛的;准就是指控制系统的准确性、控制精度,通常用稳态误差来描述, 它表示系统输出稳态值与期望值之差;快就是指控制系统响应的快速性, 通常用上升时间来定量描述。
位置式PID控制原理
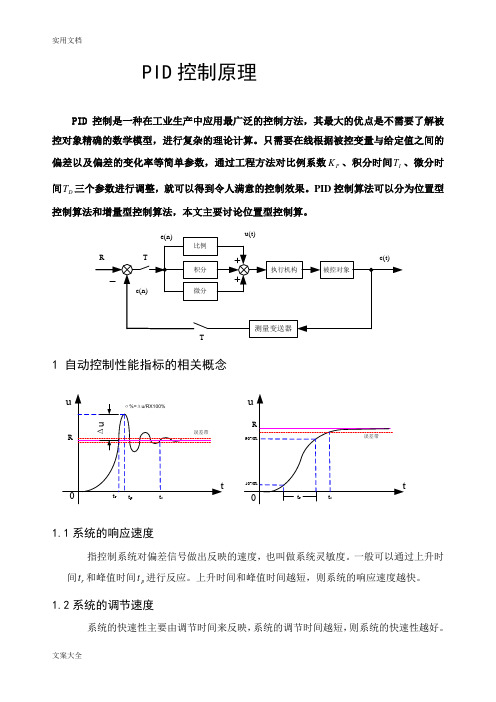
PID 控制原理PID 控制是一种在工业生产中应用最广泛的控制方法,其最大的优点是不需要了解被控对象精确的数学模型,进行复杂的理论计算。
只需要在线根据被控变量与给定值之间的偏差以及偏差的变化率等简单参数,通过工程方法对比例系数P K 、积分时间I T 、微分时间D T 三个参数进行调整,就可以得到令人满意的控制效果。
PID 控制算法可以分为位置型控制算法和增量型控制算法,本文主要讨论位置型控制算。
1 自动控制性能指标的相关概念1.1系统的响应速度指控制系统对偏差信号做出反映的速度,也叫做系统灵敏度。
一般可以通过上升时间r t 和峰值时间p t 进行反应。
上升时间和峰值时间越短,则系统的响应速度越快。
1.2系统的调节速度系统的快速性主要由调节时间来反映,系统的调节时间越短,则系统的快速性越好。
系统的快速性与响应速度是两个不同的概念,响应速度快的系统,其调节时间不一定短;调节时间短的系统,其响应速度不一定很高。
1.3系统的稳定性系统的稳定性一般用超调量%σ来反映,超调量越小,系统的稳定性越好;超调量越大,系统的稳定性越差。
系统的稳定性与系统的响应速度是一对矛盾体。
2 PID 控制算法式的推导PID 控制器的微分方程为:00])()(1)([)(u dt t de T dt t e T t e K t u D tIP +++=⎰式中:)(t e —给定值与被控变量的偏差P K —比例系数 I T —积分时间常数 D T —微分时间常数t —从开始进行调节到输出当前控制量所经过的时间间隔0u —PID 调节开始之前瞬间,执行器的输入控制信号,在调节过程中为固定值比例项:)()(t e K t u P P =积分项:⎰=tIPI dt t e T K t u 0)(1)(微分项:dtt de T K t u DP D )()(= 对上式进行离散化可得数字式PID 控制算式为:)()(n e K n u P P =∑==ni IPI i e T TK n u 0)()()]1()([)(--=n e n e TT K n u DPD 式中:)(n e —当前采样时刻给定值与被控变量的偏差T —PID 控制采样周期,也就是计算机获取)(n e 和 )1(-n e 的时间间隔则位置式PID 控制在当前采样时刻输出至执行器的控制量计算式为:00)]1()([)()()(u n e n e T T i e T T n e K n u ni DI P +⎭⎬⎫⎩⎨⎧--++=∑= 式中:)(n u —当前采样时刻输出的控制变量0u —PID 调节开始之前瞬间,执行器的输入控制信号3 比例、积分、微分环节的作用3.1 比例环节比例环节是PID 控制器中必不可少的环节。
位置式PID控制原理分享

位置式PID控制原理分享PID控制器由三个主要部分组成:比例控制、积分控制和微分控制。
比例控制根据当前误差的大小来提供控制信号。
积分控制根据过去误差值的总和来提供控制信号,以消除系统存在的静差。
微分控制根据误差变化的速率来提供控制信号,以提高系统的响应速度和稳定性。
\[u(t) = Kp \cdot e(t) + Ki \cdot \int_{0}^{t} e(t') dt' +Kd \cdot \frac{de(t)}{dt}\]其中,u(t)是控制信号,Kp、Ki和Kd分别是比例、积分和微分增益,e(t)是当前的误差,de(t)/dt是误差的变化率。
位置式PID控制的优点是简单易懂、易于实现,并且适用于不同的控制系统。
然而,它也存在一些缺点。
首先,位置式PID控制对系统参数变化不敏感,可能导致系统的响应不稳定。
其次,位置式PID控制常常难以选择合适的PID参数,需要经过大量的试验和调整。
最后,位置式PID控制的优化性能有限,较难满足复杂系统的实际要求。
为了解决位置式PID控制的不足,人们提出了许多改进的控制算法。
其中,增量式PID控制是一种常用的改进方法。
与位置式PID控制不同,增量式PID控制根据控制信号的变化量来计算增量信号,以克服位置式PID控制的参数不敏感性和调节困难性。
增量式PID控制的公式如下:\[u(t) = u(t-1) + Kp \cdot (e(t) - e(t-1)) + Ki \cdot e(t) + Kd \cdot (e(t) - 2e(t-1) + e(t-2))\]增量式PID控制的优点是对系统参数的变化更敏感,使得系统更加稳定和可靠。
此外,增量式PID控制还能够减少振荡,并提高系统的响应速度。
总之,位置式PID控制是一种广泛应用于控制系统的经典算法。
它通过比例、积分和微分控制来根据误差的绝对值计算控制信号,从而实现系统的稳定性、精确性和响应速度。
位置式PID控制原理
PID控制原理PID控制是一种在工业生产中应用最广泛的控制方联,其最大的优点是不需要了解被控对象清爾的数学模型,进斤复杂的理论廿算。
只需要在线根据祯控变量与给定值之间的嵋差以及怕差的变化率等简单参数,通11工程方法对比例系数K八稅分时同7;、徹分时同几三个参数进行坍整,就可以得到令人満意的控對效果。
PID控制算法可以分为位置型控胃算法和増量型控匍算法,本文主要置型控匍算。
1自动控制性能指标的相关樣念1.1系统的响应速度指控制系统对偏差信号做岀)5映的速度,也叫做系貌灵一般可以通ilift时间。
和峰值时间jjjH亍反应。
上升时间和间越姬,则系貌的响应速度越快。
1.2系统的调节速度系统的快速性主要由调节时间来反映,系缆的调节时间越短,则系统的快速性極好。
系统的快速性与哨应速度是两f不同的Hl念,喑应速度快的系统,其凋节时间不一定短;调节时间短的系统,其哨应速度不一定很高。
1.3系统的稳定性系统的稳定性一般用超圳量"%来反映,超说]量越小,系貌的稳定性越好;起调量強大,系统的稳定性強差。
系统的稳定性与系统的响应速度是一对? IS Ito2PID控制算法式的推导PID控制器的械分方程为:u(t) = K P[e(t) +式中:e⑴一给定值与被控变量的倫差Kp—比例系数刀一枳分时冋常数几一槪分时间常数/一从开始进行期节到输岀当前控制量所经过的时间间用"o—PID调节开始之前瞬间,执行器的输人控制信号,在调节过程中为固定IB对以上各式左右两址分别进行拉普拉祈变換可WPIDSM3的传迪函数为:U(s) _丽—比例0h u P(t) = K P e(t)枳分顶:心(r) = Kp13分顶:心(f) = K£響at对上武进行离散化可得数字武PID控制算式为:u p(n) = K p e(n)“沖)=心?亡e(j)1-0仆(n) = K P¥〔心)-e(“ -1)]式中:e(n)-当前采样时刻给定值与被控变量的偏差T-PID控制采样周期,也就是廿算Jia® e(“)和e(“一l)的时间同禍则位置式PID控翎在当前采样时刻输出至执行器的控制量计算式为:u(n) = Kp<2(”)一心一1)]汁“。
由入门到精通吃透PID

由入门到精通吃透PIDPID控制器(Proportional-Integral-Derivative Controller)是一种常见的控制器,广泛应用于工业自动化领域。
它通过对系统的反馈信号进行比例、积分和微分运算,以达到控制系统稳定和响应速度的目的。
本文将从入门到精通分别介绍PID控制器的基本原理、参数调整方法和应用实例。
一、基本原理在控制系统中,PID控制器根据反馈信号与设定值之间的差异来调整输出信号,从而实现对被控对象的控制。
它由三个基本部分组成:比例控制部分、积分控制部分和微分控制部分。
1. 比例控制部分:根据反馈信号与设定值之间的差异,以一定的比例调节输出信号。
比例控制的作用是根据差异的大小来进行精确调节,但它不能解决系统的超调和稳态误差问题。
2. 积分控制部分:通过累积反馈信号与设定值之间的差异,对输出信号进行调节。
积分控制可以消除系统的稳态误差,但会增大系统的超调。
3. 微分控制部分:通过反馈信号的变化率来预测未来的发展趋势,以调节输出信号。
微分控制可以提高系统的响应速度和稳定性,但过大的微分作用会引入噪声和振荡。
PID控制器的输出信号可以表示为:u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt其中,u(t)为输出信号,Kp、Ki和Kd分别为比例、积分和微分增益,e(t)为反馈信号与设定值之间的误差,∫e(t)dt为误差的积分,de(t)/dt为误差的微分。
二、参数调整方法PID控制器的参数选择对控制系统的性能至关重要。
有许多方法可以调整PID控制器的参数,常见的包括经验法、试错法和优化算法。
1. 经验法:根据实际经验,选择适当的参数范围,并逐步调整参数,观察系统的响应变化。
这种方法简单直观,但需要具备一定的经验和调试能力。
2. 试错法:通过不断试验不同的参数组合,观察系统的响应,并根据系统的性能指标进行优化调整。
试错法可以快速找到合适的参数组合,但依赖于多次试验和手动调整。
位置式PID讲解

位置式PID讲解⼀、公式拆解PID公式展⽰:u(t)=K_p(e(t)+\frac{1}{T_t } ∫_0^te(t)dt+T_D \frac {de(t)}{dt})把K_p乘进去得:u(t)=K_pe(t)+\frac{K_p}{T_t } ∫_0^te(t)dt+K_pT_D \frac {de(t)}{dt}令K_p为⽐例时间系数令K_i=\frac{K_p}{T_t }为积分时间系数令K_d=K_pT_D为微分时间系数就变成了这个亚⼦:u(t)=K_p e(t)+K_i ∫_0^te(t)dt+K_d\frac{de(t)}{dt}对于这个式⼦,其实涵盖了三种控制算法,每⼀种都可以单独拿出来。
⽐例控制算法P:u(t)_1=K_p e(t)积分控制算法I:u(t)_2=K_i ∫_0^te(t)dt微分控制算法D:u(t)_3=K_d\frac{de(t)}{dt}你没有看错!PID算法其实就是三个算法的组合,⽽且,在数学上⾯就是简单的代数和!⼆、基于物理进程的解释A.⽐例控制算法在这⾥⾯,e(t)=⽬标值-当前值,⾃然是离散数据,也就是说u(t)_1=K_p e(t)这个输出是根据当前值和⽬标值的差,乘以了⼀个⽐例系数得到的输出,举个例⼦,假如我们要给⼀个100ml的A量筒装满⽔,此时A量筒⾥⾯已经有了20ml的⽔。
⽽我们运⽔的⼯具是⼀个实际容积未知的B杯⼦。
我们假如B杯⼦是⼀个50ml的杯⼦(我们并不知道是50ml),给其划上100等分的刻度,那么根据条件可得T_1=e(t)=⽬标值-当前值=100-20=80。
因此现在我们给B杯⼦装⼊可达第80刻度线的⽔并“⼀滴不漏”倒⼊A量筒,由于B杯⼦实际容积为50ml,所以实际倒⼊A量筒的⽔体积为40ml。
可以发现,我们要给100ml的量筒装满⽔,通过量筒的刻度我们轻易能获知还需要倒80ml才能装满杯⼦,但是B杯⼦的容积我们并不知道。
我们给未知容积的B杯⼦划上刻线,以获知的80这个数据来给A量筒倒⽔,最好的情况是我的B杯⼦容积为100ml,这样的话按照80的刻度,⼀次性就可以把⽔加满。
电机控制进阶2——PID位置控制

电机控制进阶2——PID位置控制描述上篇文章讲解了电机的速度环控制,可以控制电机快速准确地到达指定速度。
本篇来介绍电机的位置环控制,实现电机快速准确地转动到指定位置。
1 位置控制与速度控制的区别回顾上篇,电机速度PID控制的结构图如下,目标值是设定的速度,通过编码器获取电机的转速作为反馈,实现电机转速的控制。
再来看电机位置PID控制,其结构图如下,目标值是设定的位置,通过编码器获取电机累计转动的脉冲数作为反馈,实现电机位置的控制。
所以:对比两张图,速度控制与位置控制的主要区别,就是控制量的不同。
2 核心程序了解了速度控制与位置控制的区别后,下面就可以修改程序。
2.1 编码器相关2.1.1 电机与编码器参数编码器部分,需要根据自己电机的实际参数进行设定,比如我用到的电机:编码器一圈的物理脉冲数为11定时器编码器模式通过设置倍频来实现4倍频电机的减速齿轮的减速比为1:34所以,电机转一圈总的脉冲数,即定时器能读到的脉冲数为11*4*34= 1496。
#define ENCODER_RESOLUTION 11 /*编码器一圈的物理脉冲数*/ #define ENCODER_MULTIPLE 4 /*编码器倍频,通过定时器的编码器模式设置*/ #define MOTOR_REDUCTION_RATIO 34 /*电机的减速比*/ /*电机转一圈总的脉冲数(定时器能读到的脉冲数) = 编码器物理脉冲数*编码器倍频*电机减速比*/ /* 11*4*34= 1496*/ #define TOTAL_RESOLUTION ( ENCODER_RESOLUTION*ENCODER_MULTIPLE*MOTOR_REDUC TION_RATIO )想要了解更多关于编码器的使用,可参照之前的文章: ( /d/1639052.html )2.1.2 定时器编码器模式配置用于编码器捕获的定时器的一些宏定义。
#define ENCODER_TIM_PSC 0/*计数器分频*/#define ENCODER_TIM_PERIOD 65535/*计数器最大值*/#define CNT_INIT 0/*计数器初值*/配置主要关注重装载值,倍频,溢出中断设置。
位置式PID控制原理

PID 控制原理PID 控制是一种在工业生产中应用最广泛的控制方法,其最大的优点是不需要了解被控对象精确的数学模型,进行复杂的理论计算。
只需要在线根据被控变量与给定值之间的偏差以及偏差的变化率等简单参数,通过工程方法对比例系数P K 、积分时间I T 、微分时间D T 三个参数进行调整,就可以得到令人满意的控制效果。
PID 控制算法可以分为位置型控制算法和增量型控制算法,本文主要讨论位置型控制算。
1 自动控制性能指标的相关概念1.1系统的响应速度指控制系统对偏差信号做出反映的速度,也叫做系统灵敏度。
一般可以通过上升时间r t 和峰值时间p t 进行反应。
上升时间和峰值时间越短,则系统的响应速度越快。
1.2系统的调节速度系统的快速性主要由调节时间来反映,系统的调节时间越短,则系统的快速性越好。
系统的快速性与响应速度是两个不同的概念,响应速度快的系统,其调节时间不一定短;调节时间短的系统,其响应速度不一定很高。
1.3系统的稳定性系统的稳定性一般用超调量% 来反映,超调量越小,系统的稳定性越好;超调量越大,系统的稳定性越差。
系统的稳定性与系统的响应速度是一对矛盾体。
2 PID 控制算法式的推导PID 控制器的微分方程为:式中:)(t e —给定值与被控变量的偏差P K —比例系数I T —积分时间常数D T —微分时间常数t —从开始进行调节到输出当前控制量所经过的时间间隔0u —PID 调节开始之前瞬间,执行器的输入控制信号,在调节过程中为固定值比例项:)()(t e K t u P P =积分项:⎰=t IP I dt t e T K t u 0)(1)( 微分项:dtt de T K t u D P D )()(= 对上式进行离散化可得数字式PID 控制算式为:式中:)(n e —当前采样时刻给定值与被控变量的偏差T —PID 控制采样周期,也就是计算机获取)(n e 和 )1(-n e 的时间间隔则位置式PID 控制在当前采样时刻输出至执行器的控制量计算式为:式中:)(n u —当前采样时刻输出的控制变量0u —PID 调节开始之前瞬间,执行器的输入控制信号3 比例、积分、微分环节的作用3.1 比例环节比例环节是PID 控制器中必不可少的环节。
PID控制经典教程(下)
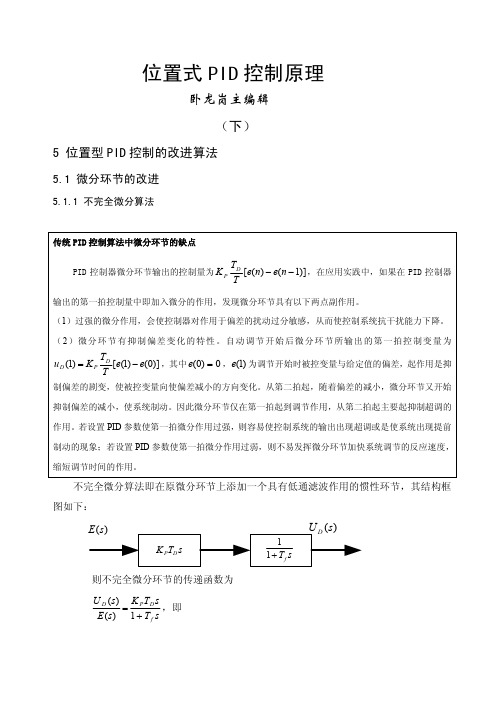
5.1.2 微分先行算法 微分先行即将对偏差的微分改为对被控变量的微分,微分环节的输出为
u D ( n) K P TD [c(n) c (n 1)] T
微分先行算法适用于给定值需要发生频繁改变的控制系统,对于此类系统,被控变量 与给定值的偏差会出现频繁的跳变,如果对偏差进行微分,则会使微分结果产生剧烈的脉 冲变化,不利于控制系统的稳定,而控制系统的被控变量输出一般不会产生突变(即使给 定值改变,被控变量的变化也是一个相对缓慢的过程) ,采用微分先行算法在预测输出变化 趋势的同时,避免了控制量的脉冲式频繁突变,有利于系统的稳定。
u D (1) K P
TD [e(1) e(0)] ,其中 e(0) 0 ,e(1) 为调节开始时被控变量与给定值的偏差,起作用是抑 T
制偏差的剧变,使被控变量向使偏差减小的方向变化。从第二拍起,随着偏差的减小,微分环节又开始 抑制偏差的减小,使系统制动。因此微分环节仅在第一拍起到调节作用,从第二拍起主要起抑制超调的 作用。若设置 PID 参数使第一拍微分作用过强,则容易使控制系统的输出出现超调或是使系统出现提前 制动的现象;若设置 PID 参数使第一拍微分作用过弱,则不易发挥微分环节加快系统调节的反应速度, 缩短调节时间的作用。
TD T [e(1) e(0)] K P D T T T u D (2) K P D [e(2) e(1)] 0 T T u D (3) K P D [e(3) e(2)] 0 T TD u D ( 4) K P [e(4) e(3)] 0 T u D (1) K P
u D (1) K P TD K T [e(1) e(0)] P D T Tf T Tf
Tf T Tf Tf T Tf Tf T Tf u D (1) Tf K P TD [e(2) e(1)] u D (1) T Tf T Tf Tf Tf K P TD [e(3) e(2)] u D ( 2) ( ) 2 u D (1) T Tf T Tf T Tf Tf Tf K P TD [e(4) e(3)] u D (3) ( ) 3 u D (1) T Tf T Tf T Tf
PID控制经典培训教程
PID控制经典培训教程PID控制经典培训教程PID控制器无疑是现代控制理论中最广泛使用的一个控制器,被广泛应用于各种自动控制系统中。
PID是指比例、积分、微分,是一个同时包含这三种控制算法的控制器。
因为PID控制器具有简单、经济、易于实现等特点,而且适用性广泛,所以它被用于许多自动化控制系统中,如温度控制、压力控制、流量控制等。
本文将对PID控制器的基本原理、特点、适用范围、参数调整等方面进行详细的介绍和讲解。
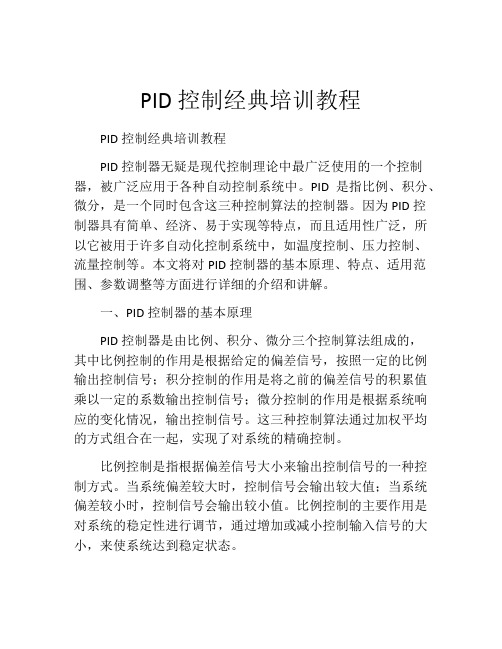
一、PID控制器的基本原理PID控制器是由比例、积分、微分三个控制算法组成的,其中比例控制的作用是根据给定的偏差信号,按照一定的比例输出控制信号;积分控制的作用是将之前的偏差信号的积累值乘以一定的系数输出控制信号;微分控制的作用是根据系统响应的变化情况,输出控制信号。
这三种控制算法通过加权平均的方式组合在一起,实现了对系统的精确控制。
比例控制是指根据偏差信号大小来输出控制信号的一种控制方式。
当系统偏差较大时,控制信号会输出较大值;当系统偏差较小时,控制信号会输出较小值。
比例控制的主要作用是对系统的稳定性进行调节,通过增加或减小控制输入信号的大小,来使系统达到稳定状态。
积分控制是指将之前的偏差信号的积累值乘以一定的系数后输出控制信号的一种控制方式。
当系统偏差较大时,积分控制的作用就会比比例控制更加明显,输出的控制信号也会更加明显;当系统偏差较小时,积分控制的作用就会相应地减弱,输出的控制信号也会随之减小。
积分控制的主要作用是消除系统稳态误差,使系统的输出值更加准确。
微分控制是指根据系统响应的变化情况输出控制信号的一种控制方式。
当系统响应变化比较快时,微分控制起到的作用就会比较显著,控制信号也会相应增加;当系统响应变化比较慢时,微分控制的作用就会相应减小,控制信号也会减小。
微分控制的主要作用是调节系统的响应速度,快速响应系统状态的变化。
二、PID控制器的特点①PID控制器对系统的参数变化具有较强的鲁棒性。
pid控制

k
K pe(k ) Ki e( j) Kd e(k ) e(k 1) j 0
式中,u(k)为第k次采样时刻的控制器的输出值;
e (k-1)和e (k)分别为第(k-1)次和第k次采样时刻的偏差值。
只要采样周期T足够小,数字PID控制与模拟PID控制就会十分精确的接近。
1.2.2 增量式PID控制算法
1.2.3 积分分离PID控制算法
• 积分分离控制算法可表示为:
k
u(k ) k pe(k ) ki e( j)T kd (e(k ) e(k 1)) / T j0
式中,T为采样时间,β项为积分项的开关系数
1 e(k) 0 e(k)
1.2.3 积分分离PID控制算法
根据积分分离式PID 控制算法得到其程 序框图如右图。
1.2.4抗积分饱和PID控制算法
• 积分饱和现象
所谓积分饱和现象是指若系统存在一个方向的偏差,PID控制器的 输出由于积分作用的不断累加而加大,从而导致u(k)达到极限位置。此 后若控制器输出继续增大,u(k)也不会再增大,即系统输出超出正常运 行范围而进入了饱和区。一旦出现反向偏差,u(k)逐渐从饱和区退出。
1.1 PID控制原理
(2)积分环节的数学式表示是:
K p
t
e(t )dt
Ti 0
只要偏差e(t)存在,积分控制作用就会就不断的增加(条件是控制器没有饱和), 偏差e(t)就不断减小,当偏差e(t)=0时,积分控制作用才会停止。可见,积分环
节可以消除系统的偏差。但积分控制同时也会降低系统的响应速度,积分作用
T是d PID控制器的微分系数。
1.2 数字PID控制
按模拟PID控制算法,以一系列的采样时刻点kT(T为采样
位置式PID控制原理

位置式PID控制原理位置式PID(Proportional-Integral-Derivative)控制是一种常用的控制算法,用于根据测量的反馈信号来调节操作变量,使其接近预期的目标值。
PID控制器基于比例、积分和微分三个部分的线性组合,通过对误差信号进行加权得到最终的控制输出。
PID控制器的原理是通过对系统的误差信号进行处理,对输出信号进行调整,使误差信号趋于零。
误差信号是参考信号与实际输出信号之间的差值,越接近零表示系统越接近所需目标。
PID控制器的输出信号会根据误差信号的大小和变化率来调整,以达到调节系统的目的。
PID控制器的具体计算公式如下:u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt其中,u(t)为控制器的输出信号,e(t)为参考信号与实际输出信号之间的误差信号,Kp、Ki和Kd为比例、积分和微分增益,de(t)/dt为误差信号的变化率。
比例部分(Proportional)是与误差信号成正比的部分,用来对系统的静态误差进行补偿。
增大Kp的值可以增加系统对误差的敏感程度,但过大的Kp值可能导致系统产生震荡。
积分部分(Integral)是对误差信号进行累计的部分,用来补偿系统的积分误差。
当系统存在静态误差时,增大Ki的值可以减小静态误差;但过大的Ki值可能导致系统产生超调或振荡。
微分部分(Derivative)是对误差信号变化率的补偿部分,用来提供系统的动态响应。
增大Kd的值可以增强系统对误差的快速调节能力,但过大的Kd值可能导致系统对噪声或干扰信号过度敏感。
在实际应用中,通过合理设置Kp、Ki和Kd的值,可以使PID控制器对于不同的系统具有良好的性能。
常用的调节方法包括试控法、根轨迹法、频率法等。
此外,为了避免超调(overshoot)、振荡(oscillation)和稳定性等问题,也可以使用限幅、饱和和滤波等技术进行改进。
总结来说,位置式PID控制原理是通过比例、积分和微分三个部分对系统的误差信号进行处理,调整输出信号,使系统接近期望值。
面试试讲 PID控制原理及应用

1.2
1
① Kp=5 0.8
0.6
0.4
0.2
0
0
2
4
6
8
10
2. PID参数整定
2.4 工程整定法实例
第一步整定比例系数,使得输出波形为平稳地由大到 小且第一个波峰的峰值为第二波峰峰值的四倍。
接着从小到大依次取值5、10、15、20、25。
1.2
1
1 PID控制原理介绍 2 PID参数整定 3 数字PID控制
1. PID控制原理
1.1 什么是PID控制
PID控制是偏差,偏差对时间的积分和偏差对时间的微 分三种控制规律的组合。它是模拟量控制中应用最广泛并解 决了控制的稳定性,快速性和准确性的控制方法。
偏差:设定值与实际值之间的差值 例如:空调温度设定值为26℃ 测量值为30℃ 偏差为-4℃ 模拟量:随着时间连续变化量 比如:温度、流量、压力
接着从小到大依次取值5、10、15、20、25。
1.5
1
⑤ Kp=25
0.5
0
0
2
4
6
8
10
2. PID参数整定
1.2
1.2
1.2
1
1
1
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0 0
2
4
6
8
10
0 0
2
4
6
0
8
10 0
2
4
6
8
10
① Kp=5
PID控制详解素材

PID操纵原理和特点工程实际中,应用最为广泛调节器操纵规律为比例、积分、微分操纵,简称PID操纵,又称PID调节。
PID操纵器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业操纵主要技术之一。
当被控对象结构和参数不能完全掌握,或不到X数学模型时,操纵理论其它技术难以采纳时,系统操纵器结构和参数必须依靠经验和现场调试来确定,这时应用PID操纵技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能有效测量手段来获系统参数时,最合适用PID操纵技术。
PID操纵,实际中也有PI和PD操纵。
PID操纵器就是系统误差,利用比例、积分、微分计算出操纵量进行操纵。
1、比例操纵〔P〕:比例操纵是最常用的操纵手段之一,比方说我们操纵一个加热器的恒温100度,当开始加热时,离目标温度相差比拟远,这时我们通常会加大加热,使温度快速上升,当温度超过100度时,我们则关闭输出,通常我们会使用这样一个函数e(t) = SP – y(t)-u(t) = e(t)xPSP——设定值e(t)——误差值y(t)——反响值u(t)——输出值P——比例系数滞后性不是很大的操纵对象使用比例操纵方法就可以满足操纵要求,但很多被控对象中因为有滞后性。
也就是如果设定温度是200度,当采纳比例方法操纵时,如果P选择比拟大,则会出现当温度到达200度输出为0后,温度仍旧会止不住的向上爬升,比方说升至230度,当温度超过200度太多后又开始回落,尽管这时输出开始出力加热,但温度仍旧会向下跌落肯定的温度才会止跌上升,比方说降至170度,最后整个系统会稳定在肯定的范围内进行振荡。
如果这个振荡的幅度是同意的比方说家用电器的操纵,那则可以选用比例操纵2、比例积分操纵〔PI〕:积分的存在是针比照例操纵要不就是有差值要不就是振荡的这种特点提出的改良,它常与比例一块进行操纵,也就是PI操纵。
其公式有很多种,但大多差异不大,标准公式如下:u(t) = Kpxe(t) + Ki∑e(t) +u0u(t)——输出Kp——比例放大系数Ki——积分放大系数e(t)——误差u0——操纵量基准值〔根底偏差〕大家可以看到积分项是一个历史误差的累积值,如果光用比例操纵时,我们了解要不就是达不到设定值要不就是振荡,在使用了积分项后就可以解决达不到设定值的静态误差问题,比方说一个操纵中使用了PI操纵后,如果存在静态误差,输出始终达不到设定值,这时积分项的误差累积值会越来越大,这个累积值乘上Ki后会在输出的比重中越占越多,使输出u(t)越来越大,最终到达排除静态误差的目的PI两个结合使用的情况下,我们的调整方法如下:1、先将I值设为0,将P值放至比拟大,当出现稳定振荡时,我们再减小P值直到P值不振荡或者振荡很小为止〔术语叫临界振荡状态〕,在有些情况下,我们还可以在些P值的根底上再加大一点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PID 控制原理PID 控制是一种在工业生产中应用最广泛的控制方法,其最大的优点是不需要了解被控对象精确的数学模型,进行复杂的理论计算。
只需要在线根据被控变量与给定值之间的偏差以及偏差的变化率等简单参数,通过工程方法对比例系数P K 、积分时间I T 、微分时间D T 三个参数进行调整,就可以得到令人满意的控制效果。
PID 控制算法可以分为位置型控制算法和增量型控制算法,本文主要讨论位置型控制算。
1 自动控制性能指标的相关概念1.1系统的响应速度指控制系统对偏差信号做出反映的速度,也叫做系统灵敏度。
一般可以通过上升时间r t 和峰值时间p t 进行反应。
上升时间和峰值时间越短,则系统的响应速度越快。
1.2系统的调节速度系统的快速性主要由调节时间来反映,系统的调节时间越短,则系统的快速性越好。
系统的快速性与响应速度是两个不同的概念,响应速度快的系统,其调节时间不一定短;调节时间短的系统,其响应速度不一定很高。
1.3系统的稳定性系统的稳定性一般用超调量%σ来反映,超调量越小,系统的稳定性越好;超调量越大,系统的稳定性越差。
系统的稳定性与系统的响应速度是一对矛盾体。
2 PID 控制算法式的推导PID 控制器的微分方程为:00])()(1)([)(u dt t de T dt t e T t e K t u D tIP +++=⎰式中:)(t e —给定值与被控变量的偏差P K —比例系数I T —积分时间常数 D T —微分时间常数t —从开始进行调节到输出当前控制量所经过的时间间隔0u —PID 调节开始之前瞬间,执行器的输入控制信号,在调节过程中为固定值比例项:)()(t e K t u P P =积分项:⎰=tIPI dt t e T K t u 0)(1)(微分项:dtt de T K t u DP D )()(= 对上式进行离散化可得数字式PID 控制算式为:)()(n e K n u P P =∑==ni IPI i e T TK n u 0)()()]1()([)(--=n e n e TT K n u DPD 式中:)(n e —当前采样时刻给定值与被控变量的偏差T —PID 控制采样周期,也就是计算机获取)(n e 和 )1(-n e 的时间间隔则位置式PID 控制在当前采样时刻输出至执行器的控制量计算式为:00)]1()([)()()(u n e n e T T i e T T n e K n u ni DI P +⎭⎬⎫⎩⎨⎧--++=∑= 式中:)(n u —当前采样时刻输出的控制变量0u —PID 调节开始之前瞬间,执行器的输入控制信号3 比例、积分、微分环节的作用3.1 比例环节比例环节是PID 控制器中必不可少的环节。
比例环节的作用为放大误差信号,提高控制器对于偏差信号的感应灵敏度,其特点是不失真、不延迟、成比例的复现控制器输入信号的变化。
过大的比例系数会使系统的稳定性降低、增加超调量,出现振荡甚至发散。
控制系统的稳定性与灵敏性是一对矛盾,比例系数的选择只能在稳定性与灵敏性之间进行折中选择。
积分环节输出控制量计算公式为:)()(n e K n u P P =。
若控制器中仅有比例控制环节,则会产生调节余差,如下图所示:tuR余差tuR余差1 比例控制稳态误差产生的原因单纯的比例环节所产生稳态误差的原因主要有两个方面,分别为原理性稳态误差和结构性稳态误差。
1.1 原理性稳态误差原理性稳态误差是由比例控制系统的原理所引起的,以调节阀流量控制系统为例进行说明:调节阀比例K标准流量计管路e(n)目标流量值R u(t)流量c(t)c(n)采样TD/Au(n)如图所示为单回路流量比例控制系统,控制系统的给定流量值为R ,被控变量为流量值)(t C 。
调节阀为mA mA 204—电流控制,其开度与输入电流值)(t u 的关系为:%1004204)(⨯--=mAmA mAt u 调节阀开度设调节开始时,偏差为)(n e ,则调节阀的输入信号为0)()(u n Ke n u +=,0u 为调节阀的初始输入电流值。
则有%1004204)(0⨯--+=mAmA mAu n Ke 调节阀开度但调节阀从其初始位置开始动作到达到动作终点需要一定时间,而随着调节阀的动作,偏差值)(n e 也会不断发生变化,使得调节阀的输入信号也不断变化。
当某一时刻,调节阀的开度和输入信号满足关系%1004204)(⨯--=mAmA mAt u 调节阀开度时,调节阀将停止动作,由调节阀所控制的被控流量值也将停止变化,偏差值)(n e 也将保持不变,控制系统达到稳定平衡状态。
控制变量随时间变化的波形图被控变量流量值随时间变化的波形图可以发现,调节阀要想在原开度的基础上保持一定的开度增量,就必须有输入电流信号,这就使得)(n e 值不能为0 (若)(n e 的值为0,则调节阀的输入电流值就会为0u ,调节阀的开度值也将会为初始3.2 积分环节积分环节可以起到位置记忆功能,将设定值与反馈值的偏差不断进行积累,使控制器的输出控制信号不断增强,直到偏差为0,从而消除系统的稳态误差。
积分环节输出控制量计算公式为: ∑==ni IPI i e T TK n u 0)()(,当积分时间IT增大时,积分作用减弱,消除偏差所需的时间也就较长,但可以减小超调,提高动态响应的平稳性。
当I T 减小时,积分作用加强,消除偏差所需时间也较短,但过小的I T 将有可能引起振荡甚至造成系统的不稳定,因为积分环节输出的控制信号总是滞后于偏差的变化。
此外,过强的积分作用还有可能引起积分饱和,带来较大的超调量并延缓了进入稳定状态的速度。
3.3 微分环节微分环节根据偏差的变化趋势输出控制量,并能在偏差值发生较大变化之前输出超前校正信号。
微分环节可以使系统的超调量下降,同时改善系统的动态调节速度。
微分环节输出控制量计算公式为: )]1()([)(--=n e n e TT K n u DPD ,当微分时间常数D T 过大时,会使响应过程提前制动(例如下图第20秒左右,即出现系统提前制动的现象),从而延长调节时间并出现余差。
此外过强的微分作用还会使系统对高频噪声干扰过于敏感,削弱系统的抗干扰能力。
图一开始制动图二开始制动图三4 位置型PID 控制算法和增量型PID 控制算法的区别位置型PID 控制算法,适用于不带积分元件的执行器,执行器的动作位置与其输入信号呈一一对应的关系。
控制器根据第n 次被控变量采样结果与设定值之间的偏差)(n e 计算出第n 次采样之后所输出的控制变量。
位置式PID 控制算法的数学表达式为:00)]1()([)()()(u n e n e T T i e T Tn e K n u ni DI P +⎭⎬⎫⎩⎨⎧--++=∑=其中)1(-n u 是第1-n 次采样之后所输出的控制变量。
控制变量)(n u 的值将决定第n 次采样之后执行器的动作位置。
以伺服调节阀对流体流量或压力进行调节为例进行说明。
若所使用的调节阀输入控制信号为4—20mA 电流,则当阀门执行器输入电流为4mA 时,阀门的开度值为0%,当阀门执行器输入电流为20 mA 时,阀门的开度值为100% 。
阀门执行器输入的介于4—20mA 的任一电流值I ,均与阀门的某一开度值成一一对应的关系,其对应关系表达式为:%1004204%⨯--=mAmA mAI 开度与位置型PID 算法相对应的是增量式PID 算法,增量式算法适用于自身带有积分记忆元件的执行器,此类执行器的特点是:执行器的动作终点位置与之前每次输入信号的累加值相关,每次执行器所输入的控制信号所决定的是本次执行器动作终点位置相对于上一次动作终点位置的改变量,此类执行器比较典型的有步进电机和步进电机驱动阀门。
增量式PID 算法输出控制变量表达式为:)]}2()1(2)([)()1()({)]2()1-([)()1-(-)]1()([)()()1(-)()(1-00-+--++--=⎭⎬⎫⎩⎨⎧--++⎭⎬⎫⎩⎨⎧--++=-=∆∑∑==n e n e n e TT n e T Tn e n e K n e n e T T i e T Tn e K n e n e T T i e T T n e K n u n u n u D I P n i DI Pni D I P 5 位置型PID 控制的改进算法5.1 微分环节的改进5.1.1 不完全微分算法不完全微分算法即在原微分环节上添加一个具有低通滤波作用的惯性环节,其结构框图如下:则不完全微分环节的传递函数为sT sT K s E s U f D P D +=1)()(,即 )(1)(s E sT sT K s U f D P D +=,整理后可得 )()()(s sE T K s sU T s U D P D f D =+ ,转化为微分方程后为dt t de T K dt t du T t u DP D fD )()()(=+,用一阶后向差分方程进行离散化为 Tn e n e T K T n u n u T n u DP D D f D )1()()1()()(--=--+,整理之后可得 )]1()([)1()(--++-+=n e n e T T T K n u T T T n u fDP Dff D5.1.2微分先行算法微分先行即将对偏差的微分改为对被控变量的微分,微分环节的输出为)]1()([)(--=n c n c TT K n u DPD 微分先行算法适用于给定值需要发生频繁改变的控制系统,对于此类系统,被控变量与给定值的偏差会出现频繁的跳变,如果对偏差进行微分,则会使微分结果产生剧烈的脉冲变化,不利于控制系统的稳定,而控制系统的被控变量输出一般不会产生突变(即使给定值改变,被控变量的变化也是一个相对缓慢的过程),采用微分先行算法在预测输出变化趋势的同时,避免了控制量的脉冲式频繁突变,有利于系统的稳定。
5.2 积分环节的改进5.2.1 积分限幅算法设置控制器输出控制量的极限值,当PID 控制器的输出量超出设定范围后,即停止积分运算,仅保留比例及微分运算。
算法原理如下所述:∑==ni IPI i e T TK n u 0)()(设定范围),(max min u u①若),()(max min u u n u I ∈,则0)()()()(u n u n u n u n u D I P +++= ②若),()(max min u u n u I ∉,则0)()1()()(u n u n u n u n u D I P ++-+=5.2.2 积分分离算法积分分离算法的基本思想是,当被控量与设计的偏差量偏差较大时,取消积分量,以免积分量使系统稳定性降低,超调量增大;当被控值接近定值时,引入积分控制,以消除静差,提高系统精度。