MEMS高g加速度传感器高过载能力的优化研究
SOI特种高g值MEMS加速度计设计与分析

S1 O 特种 高 g ME 值 MS加速度 计设计 与分析 宰
许 高斌 汪祖 民 陈 兴
( 合肥工业大学电子科学与应用物理学院安徽省微 电子机械系统:程技术研究中心, l 合肥 20 0) 30 9 摘 要: 基于 S 技术.利用 IP体硅深加工, OI C 设计分析了一种新型平面 内振动高 g值压阻式加速度计。 该加速度计包括
明, 加速度计存 轴向和 ' 向灵敏度分别为 1 vg和 11 vg , 轴 . p/ 2_ . p/;谐振频率分别为 4 9k z 4 5k z 8 7 H 和 7 H 。可实现对量程高达
2 5万 g加速 度 的测 量 。
关键 词 : 速 度计 ;S I 加 O ;扇 形结 构 ;u型压 敏 电阻 中 图分 类号 : P l T 22 文 献标 识码 : A 国家 标 准学 科 分类 代码 : 6 . 2 404 0 0
v rfe yu i gt eF e i db sn h EM o l i t o AN S YS.h i lto e ut h w t h e stvt f h c ee o ee so t esmu ai nr s l s o t es n i i o ea c lr m t r fX.a i s ha t i y t xs a d y-a i r . g .— nd 1 1 g .一 , e p c iey ter s n n e fe u n y ae4 9 n x sa e 12 vg la .8 vg 1 r s e tv l,h e o a c q e c r 7 KHza d 4 5 r n 7 KHz r s e tv l , , e p c iey a d t eta s es e iii ft es n o sa p o i aey e u l oz r . g - i n h r n v res nst t o e s ri p r xm t l q a e o Hih g smulto e u t rdit d i i ae v y h t ai n rs lsp e ce t ss f o ea in e e b v .×l 5 o xr m ei p c p lc to . p r t v n a o e25 0 g f r te o e m a ta p iai n K e w o d : c lr m ee ; OI S co .ma ssr c r ; .h p e O e itn e y r s Ac eeo tr S : e t r s tu t e U s a epiz r ssa c u
MEMS高g加速度传感器封装贴片技术的研究

8 % 的环 境下 固化 9 mi , 0 0 n 因此 , 仿 真 中假 设 整 在
个封 装体 的初始 温 度 为 8 % , 且 此 时 的环境 温 0 并 度 与封装 体 的温 度 相 同 , 求 解 过 程将 整 个 封 装 在 结构 从 8 c 冷 却 到 室温 2 ℃ 。仿 真分 析 中主 要 OI = 5 研究 贴片 胶 的热 膨胀 系数 、 性 模 量及 厚 度 对 芯 弹
机 械约束 及 封装 体 各 部 件 的 热膨 胀 系 数 不 匹 配 ,
封 装体 中将 产生 热应 变和热 应力 。在 贴片胶 固化
片及 封装 体热应 力 和热应变 的影 响 。仿真 结果 如
图 4所 示 。
过 程 中封装 体 附加 产 生 的应 变 和应力 将对传 感 器
T 22 P 1
基 于 ME S技 术 的 器 件 一 般 都 含 有 活 MS器 件 芯 片 提供 保 护 作 E
用 , 且 作 为 M MS技 术 中 一 个 重 要 的 研 究 领 并 E
域 。封装 是 高 g加 速 度传 感 器 高 可 靠 性 的 保 证 ,
引线 键 合及 封 冒等过 程 , 即将结 构 完 好 的传 感 器
收 稿 日期 :O 10 -1 修 改稿 ) 2 l -71 ( 基 金项 目 : 型机 械 电子 系 统 ( MS 测 试 计 量 技 术 与 理 论 微 ME )
研 究 ( 0 30 0 5 55 3 )
化 工
自 动 化 及 仪 表
度 是 影 响 热应 力 的 主要 因 素 , 时贴 片胶 的 弹 性 模 量 、 度 及 贴 片胶 的 量 将 影 响 到 传 感 器 的 输 出灵 敏 同 厚
度。
一种高精度宽量程MEMS组合加速度计设计与优化

础 ,不 仅 实 现 了 宽 量 程 范 围 内 的 加 速 度 的 精 确 测 量 输 出,还解决了零位温度偏移过大的问题。
1 加速度测量原理
每一款加速度计都有设定好的敏感轴向,可测量在 该方向上的加速度。由于本文实验测试平台为高精度 三轴转台,固定安装后的组合加速度计是在水平面内绕 固定圆心做半径为 r的圆周运动。根据力学原理可知, 敏感轴向测量的是圆周运动时产生的离心加速度 a,具
Keywords:accelerometer;vehicle ⁃ mounted MEMS;chip stability;converter accuracy;temperature offset;measurement accuracy;contrast experiment
0引言
MEMS 技术本质上是把电子电路和微机械元件集 成 到 一 颗 芯 片 的 半 ห้องสมุดไป่ตู้ 体 技 术 ,自 20 世 纪 80 年 代 以 来 MEMS 技术越来越受到人们的重视[1],被应用到非常多 的领域,在民用国防等领域发挥着不可或缺的作用。因 项目要求-45~85 ℃全温范围内零偏变化小于 5 mg。因 此 本 文 以 不 同 的 高 精 度 MEMS 加 速 度 计 、微 控 制 单 元 MSC1214、数/模 转 换 芯 片 AD5781、MAX6350 为 硬 件 基
的稳定性和两种数/模转换器的分辨率和精度,找出高低温变化时零位温度偏移过大的原因,最后设计多组对照实验进行验
证。解决了高低温情况下零位输出温度偏移过大的问题。最终实现了-45~85 ℃全温范围内零偏变化小于 5 mg,改进后的
高低温相对常温的零位最大偏差均方差提高了 21.42 倍,满足了项目要求。
Jun. 2021 Vol. 44 No. 12
一种抗高过载MEMS惯性微模组及制备方法与流程

一种抗高过载MEMS惯性微模组及制备方法与流程引言MEMS(微电子系统)惯性器件是一种重要的微纳米器件,具有小尺寸、低功耗、高精度等优点,在航天、军事、工业自动化等领域有着广泛的应用。
然而,在实际应用中,由于机械系统输入的震动和冲击等环境因素,MEMS惯性器件易受高过载和振动的影响,导致性能下降。
因此,研究一种抗高过载的MEMS惯性微模组及其制备方法,对提高MEMS惯性器件的可靠性和稳定性具有重要意义。
抗高过载MEMS惯性微模组原理和结构抗高过载MEMS惯性微模组是一种基于硅微加工技术制备的微型惯性器件,具有高灵敏度、高精度和抗高过载等优点。
其工作原理基于惯性传感器技术,通过监测微机械系统输入的加速度和角度变化,来实现对机械系统状态的测量。
抗高过载MEMS惯性微模组主要包括惯性传感器和控制电路两部分。
其中,惯性传感器由加速度计和陀螺仪两部分组成,加速度计用于检测微机械系统在x、y、z三个方向上的加速度,陀螺仪用于检测微机械系统绕x、y、z三个轴上的角速度。
控制电路主要用于放大、滤波、转换和数字化惯性传感器输出信号,实现对微机械系统状态的测量和控制。
抗高过载技术抗高过载技术是抗高加速度和冲击的一种先进的技术手段,可有效提高MEMS惯性器件的工作稳定性和可靠性。
抗高过载技术主要包括结构设计和材料选择两个方面。
在结构设计方面,抗高过载MEMS惯性微模组采用了一种三重保护结构,即在芯片层、器件层和封装层分别设置了抗高过载保护结构。
其中,芯片层的抗高过载保护结构由衬底、延展区和限制区组成,可以有效分散输入高加速度和冲击对微机械系统的影响。
器件层的抗高过载保护结构由支撑柱和阻尼材料组成,可对输入的高加速度和冲击产生的振动进行抑制。
封装层的抗高过载保护结构由壳体和填充材料组成,可对外界的高过载和振动起到缓冲和隔离作用。
在材料选择方面,抗高过载MEMS惯性微模组采用了一种高弹性模量和高阻尼比的复合材料作为阻尼材料,可以有效抑制输入高加速度和冲击产生的振动。
MEMS加速度计分析课件

导航
集成的全球定位系统(GPS)或基站的三角网能用来确定移 动电话的位置。但是利用现有的这种小显示屏。对于用来 完整显示用户前面的环境是非常有利的。正常情况下采用 电子式指南针确定机首方位,但是指南针必须与地球表面 保持平行以便使机首方位误差小。这种误差依赖于到地球 的地磁赤道的距离变化。例如在北京,指南针与地球表面 平行方向每偏离1度,会导致3度的机首方位误差。当用户 使用移动电话时,指南针可能倾斜于水平面方向成45度, 从而会产生很大的机首方位误差。可使用加速度计能用来 确定手机(和指南针)相对地球表面的实际方位以补偿这 种误差。
MEMS 运动传感器在移动电话中的应用
1、光标或游戏机控制 2、动态显示配置 3、导航 4、计步器 5、磁盘驱动器保护
光标或游戏机控制
加速度计可作为控制系统光标的输入或者游戏机的输入。 左右倾斜或前后翻倒移动电话可左右或上下移动屏幕上的 光标。这种功能是大家熟知的并且已被集成到几个独立的 游戏机(例如任天堂公司的滚滚卡比游戏)和游戏控制器 (例如微软公司的Freestyle Pro控制器)中。跳跃动作还 引入了第三个轴(Z轴)。与大多数移动电话中采用的标准 8位置控制不同,加速度计能提供可变的(模拟)控制。用 户手机倾斜的越大,光标移动速度越快。由于采用倾斜作 为一种模拟信号输入并且与电话键盘输入方式相结合,所 以可用一只手完成复杂的输入组合。
(2) 温漂小、迟滞效应小成为新的性能目标,选择合适的材料,采 用合理的结构,以及应用新的低成本温度补偿环节,能够大幅度提 高微加速度计的精度。
(3) 多轴加速度计的开发成为新的方向。已经有文献报道开发出三 轴微硅加速度计,但是其性能离实用还有一段距离,多轴加速度计 的解耦是结构设计中的难点。
五、MEMS加速度计的发展趋势
高过载三维MEMS加速度传感器敏感芯片设计仿真与优化

过 载 ME MS压 阻式加 速度传 感器 。提 出 了中心 岛硬 心质 量 块 E型膜片 结构设 计 方案 和独 特 的三 维力敏 电阻的布 桥方 式, 详细 阐述 了传 感 器 三维加速 度测 试 的工作原理 , 用有 限元分析 软件进 并 运
行 仿真验 证, 运用零 阶粗 优化 与一 阶梯 度 寻优相 结合 的优化 算 法, 并 对传 感器 敏感 芯片 的结构 参 数
进行 优化 。优化 仿真结 果表 明 : 感器敏 感 芯片 的结构 强度足 够, 传 可承 受 的瞬 态高冲 击过载 峰值 最
高 可达 2 0 g; ×1 芯片 固有 频率 可达 2 1 Hz 三轴 向加速 度测 试力 敏 电阻布 设位 置应 力应 变大, 3 ; k 使 得传 感器有 较 高的输 出灵敏 度, 理论 上 的优化 仿真 分析保 证 了传 感器 有可 靠 的工作性 能, 最后 研制 传 感器 原理样 机, 行 实验验 证。 进
张 振 海 ,李科 杰 宪 仁 ,任 ,刘 俊
(. 1 北京 理 工 大 学 机 电工 程 与 控 制 国家 级 重 点 实 验 室 ,北 京 1 0 8 ; .中北 大 学 电子 测 试 技 术 国 家重 点实 验 室 ,ti 太 原 0 0 5 ) 0 0 1 2 hn 30 1
摘要 :为获取硬 目标 侵彻 武器 弹体侵 彻过 程 中完 整 的三轴 向加 速 度信 号, 制 了三维 高冲 击 研
2- t n l y La f e to i e s r me tTe h oo y Nai a o Ke b o c r n cM au e n c n lg ,No t ie s y o i a El rh Un v ri f t Ch n ,Tay a 3 0 1 S a 。C ia iu n 0 0 5 hn hn )
基于梁膜结构的MEMS高g值加速度传感器

( S t a t e Ke y L a b o r a t o r y f o r Ma n u f a c t u r i n g S y s t e ms E n g i n e e r i n g , X i ’ a n J i a o t o n g Un i v e r s i t y , X i ’ a n 7 1 0 0 5 4 , C h i n a )
关键词 : 微机 电 系统 ; 高 g值加速度 传感器 ; 有 限元仿 真分析 ; 测试 中图分类号 : T P 2 1 2 文献标识码 : A 文章编号 : 1 0 0 2—1 8 4 1 ( 2 0 1 4 ) 0 2— 0 0 1 1 — 0 3
M EM S Hi g h - g Ac c e l e r o me t e r Ba s e d o n Be a m- me mb r a n e S t r u c t u r e
2 01 4焦
仪 表 技 术 与 传 感 器
I n s t r u me n t Te c h n i q u e a n d S e n s o r
2 01 4 No . 2
第 2期
基 于 梁膜 结 构 的 ME MS高 g值 加 速度 传 感器
李 t r a c t : T o me e t t h e r e q u i r e me n t f o r h i g h i mp a c t a c c e l e r a t i o n me a s u r e me n t , a h i g h - g a c c e l e r o me t e r w a s d e v e l o p e d b a s e d o n
高g值加速度传感器封装的实验研究

高g值加速度传感器封装的实验研究摘要本文主要叙述了基于MEMS高g值加速度传感器的硅封装胶和封装管壳的性能表现。
通过使用拉曼光谱,可以得出由于封装胶的厚度不同和封装管壳的材料不同而引起的残余应力的特性。
由实验可以得出:封装胶越厚,残余应力增长越慢:由残余应力引起的压阻变化越小;和陶瓷封装相比,不锈钢封装有更高的灵敏度和更大的抗过载能力。
1. 概述作为小型武器和穿透性武器的核心器件之一,MEMS高g值加速度传感器需要工作在极端高冲击的条件下,冲击力可以达到200000g,由于工作环境的极端恶劣,封装引起的传感器失效时一个重要的问题,并且必须给予高度重视。
外壳的破裂,表面凹陷,链接断裂,引线断裂等都是由于封装导致的传感器失效的可能原因。
据报道,在传感器制作过程中,有50%的开销用于封装工艺。
所以如何发展可靠的,低成本的封装工艺对于高g值加速度传感器来说至关重要。
不同MEMS传感器有着不同的封装技术和不同的关键因素。
Zarnik称:工艺过程中引进的残余应力不利于压力传感器的性能。
由FEA和DOE仿真的结果得出:厚的光刻胶和最小的硅片陷入封装胶深度以及最小的周边的封装胶共同决定了传感器的最小残余应力。
Mariani研究了市场上的单轴多晶硅MEMS加速度计的封装效应,他们发现封装并不总是可以增加传感器的负载能力。
鉴于高g值加速度计工作时所处的恶劣环境,有关MEMS高g值加速度传感器封装效应对其可靠性以及性能的影响的研究已经在进行。
我们可以得出结论:由于封装管壳,封装胶以及MEMS结构之间材料不同而引起的残余应力是MEMS 传感器封装过程中的核心因素。
Chen进行了在高g下封装加速度计的频域和时域FEA仿真分析,仿真结果指出:贴片胶的杨氏模量对于模子形状和传感器的性能有很大影响,另一个重要因素是封装的管壳。
高g值加速度计主要使用两种不同的材料:第一种是陶瓷,已经被广泛商业化使用于Draper加速度计中;另一种是金属(主要是不锈钢),比如ENDVCO的7270A,PCB的3991A11以及KISTLER 的8742A100.作为MEMS 高g 值加速度的关键技术之一,封装工艺被广泛的研究并试图提高他的可靠性和性能。
MEMS高G值加速度传感器设计
中图分类号:TP212.9
文献标识码:A
文章编号:l004.73lx(2008)16-4306.04
Design Of MEMS high GAccelerometer sm Yun.bo,QI xi∞.j诹.LIU Jun。MENG Mei州
∞矗咄lKcyLabomtory矗)rElcc的面cMe部u砌印tT鼬nolo肼Nornlu面vefs时ofchina,倒”锄03005l,cllina)
Abstract:A higll 2 piezoresistive accelerometcr惭tll four.tenIlinal fixed be锄一island smlcture waLs designed for me purpose
d即脚Pd of testing in speciaI demand.7确e wP垃而f D,’聃已聊口船讲耐历P如伽ce 6Pm馏B"珐P鲫f盯D厂坍御s口一d 6印埘s wB比60咖 6y氐1)H P纪矗∥珐P 64c乐∥珐P朋础s.Combining the calculation of mechanics and t11e teclllloJo星防me dilllension
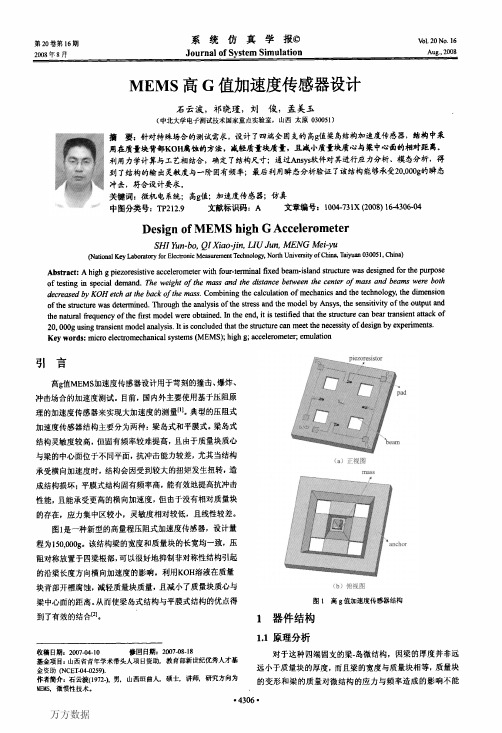
图1是一种新型的高量程压阻式加速度传感器,设计量 程为150,0009。该结构粱的宽度和质量块的长宽均一致,压 阻对称放置于四梁根部,可以很好地抑制非对称性结构引起 的沿梁长度方向横向加速度的影响。利用KOH溶液在质量 块背部开槽腐蚀,减轻质量块质量,且减小了质量块质心与 梁中心面的距离。从而使梁岛式结构与平膜式结构的优点得 到了有效的结合【zJ。
图l高g值加速度传感器结构
1器件结构
1.1原理分析
收稿日期:2007—04一lo
惨回日期:2007-08一18
灌封技术对MEMS高g加速度传感器性能影响研究
L I Ce , 一.S HI run . b o 一.LI U Xi n ,
( 1 . N a t i o n a l Ke y L a b o r a t o r y f o r E l e c t r o n i c Me a s u r e me n t T e c h n o l o g y , N o r t h Un i v e r s i t y
摘
要 :针对恶劣环境下高频信号 的干扰与 由封装 引起 的结 构失效 , 设 计 了一 种 M E M S高 g 加速 度传感
器, 通 过灌封实现机械滤波 , 保证封 装 的可靠性 。根据传 感器 封装 工艺 , 利用 A N S Y S软件 建立 有 限元 模 型, 仿真分析了灌封技术对传感器结构和性能 。结果表明 : 灌 封技 术可 提高 传感器的高过载能力和输 出灵
E d u c a t i o n , T a i y u a n 0 3 0 0 5 1 , Ch i n a )
Ab s t r a c t :Ai mi n g a t i n t e r f e r e n c e o f h i g h ̄ e q u e n c y s i g n a l s i n h a r s h e n v i r o n me n t s a n d f a i l u r e s c a u s e d b y p a c k a g e, d e s i g n a h i g h - g ME MS a c c e l e r a t i o n s e n s o r wh i c h h a s h i g h r e l i a b i l i t y b y me a n s o f e n c a p s u l a t i o n .Ac c o r d i n g t o
mems惯性开关接触增强方法和抗过载机制研究

STUDY ON THE CONTACT ENHANCEMENT METHOD AND SHOCK-RESISTIBILITY MECHANISM OF A MEMSINERTIA SWITCHABSTRACTThe MEMS inertia microswitch can realize both the sensing and the actuating functions. The working principle of the inertia microswitch is that the movable electrode (usually the suspend proof mass moves toward the stationary electrode and contact it when the switch is accelerated up to the threshold level, it can realize the switch on/off of the external circuit. In most cases, MEMS inertia microswitch can replace the complex detection system which is composed of accelerometer, control unit and actuation unit. And it can make up for the shortcomings of the traditional accelerometer, such as the spurious trigger caused by electromagnetic interference, the complex signal processing circuit and so on. MEMS inertia switch is regarded as a passive device with the sensing and the actuating functions, which has many advantages such as small size, light weight, fast response speed and low manufacturing cost. Therefore, the MEMS inertia switch is widely used in detonator systems, safe airbag of the vehicle and vibration monitoring of products and storage. In recent years, it has been paid much attention by more and more researchers from MEMS field. Especially, with the development of the internet of things (IoT) technology, MEMS inertia switches are widely used for detecting the vibration shock and then sending corresponding overload signal in remote areas or difficultly recharging areas where the power supply is limited. Because it has the advantages of zero power consumption. Contact time is one of the key indicators whether the MEMS inertia switch can effectively realize switch-on/off of the external circuit. However, the stationary electrode and movable electrode are rigid structures in the conventional MEMS inertia switches, and the rigid collision between the two electrodes is easy todamage the device. Moreover, the serious bouncing behavior between their two electrodes happens and it will result in an extremely short contact time (often less than 10μs). Therefore, it will increase the difficulty of the signal processing when these switches are integrated on the circuit.Two design of the contact-enhanced vertically-drive and horizontally-driven MEMS inertia switch based on surface micromachining technology have been proposed in the paper considering disadvantages above-mentioned. Scheme I, one cross beam with holes have been used as the stationary electrode in the vertically-driven switch, the cross beam can elastically deform after the sensitive proof mass collides with it, which can prolong the contact time between the two electrodes. In order to further enhance the contact effect, the "mouth" type cross beam with holes is used as the stationary electrode, which can further reduce the stiffness of the stationary electrode. Numerical simulation and structural optimization of the designed inertia switch have been completed by ANSYS software. The effect of the shape, width, length and thickness of the stationary electrode on the stiffness and contact time was studied. The simulated results show that it is a convenient method to enhance the contact duration by reducing the thickness of the fixed electrode in order to realize miniaturization of the device. Furthermore, the contact effect of the MEMS inertia switch was better when the "mouth" type cross beam with holes is used as the fixed electrode. Scheme II, the vertically-driven MEMS inertia switch with the synchronous follow-up compliant electrodes is designed. The stationary electrode and movable electrode both are optimized, which makes the contact mechanism of the two electrodes turn into flexible contact to extend the contact time. The contact dynamic process of synchronous follow-up compliant electrodes is analyzed by using the basic physical model of inertia switch. Meanwhile, the dynamic contact process of the model is simulated by using ANSYS software. The simulation results show that the flexible designed stationary electrode can elastically deform in the contact process, and firstly the two electrodes both move in the sensitive direction. In particular, the movable and fixed electrodes can both rebound in the sensitive reverse direction, so the two electrodes can maintain a long contact to realize the longer contact time of the inertia switch.The dynamic response process of the inertia switch with L-shaped elastic cantilever beam as a movable electrode is simulated by ANSYS. It shows that the optimized designstructure not only can extend the contact time as expected, but also the optimized design structure can avoid the deformation stress concentration under the high-g acceleration. At the same time, the maximum stress is correspondingly reduced, the L- shaped cantilever beam is not easy to fracture, and the reliability of the device is improved.In addition, the parameters of the inertia switch are designed and simulated reasonably in order to improve the shock-resistibility of the inertia microswitch. The simulated results show that the shock-resistibility of the inertia switch decreases with the increase of the mass weight, the gap between the proof mass and reverse constraint blocks, but increases with the whole system stiffness. Finally, the limited structure layer can improve the shock-resistibility of the inertia switch and prevent spurious trigger occurring.In this paper, the single technology (such as the baking glue, electroplating, lithography, release and so on) was deeply studied. Different kinds of MEMS inertia switch with high aspect ratio structure were successfully fabricated by multi-layers electroplating technology based on non-silicon surface micromachining after integrating related compatible technologies and determining appropriate parameters. The volume of the fabricated device is 1.2×1.2×0.12mm3, the miniaturization goal and the advantages of MEMS surface micromachining are fully realized.The dynamic response properties (including threshold acceleration, contact time, contact resistance, and shock-resistibility, etc.) of the fabricated inertia microswitch under half-sine shock acceleration with ~1ms pulse width was tested by a drop hammer system. The test results show that the contact time of the inertia switch with the multi-holes crossbeam as the fixed electrode decreases with the increase of the width and thickness of the beam, but increases with the length of the beam. The test contact time of horizontally-driven the inertia switch with the optimized movable electrode under the acceleration 288g is 150µs, and the threshold acceleration and the test contact time increase with the acceleration pulse width. In order to further extend the contact time, the two electrodes both are optimized.The contact time of the inertia switch with synchronous follow-up electrodes is approximately 390µs, which is longer than the one of the switch with only one flexible electrode. The test reverse threshold acceleration decreases with the gap between the proof mass and reverse constraint blocks. The testresults are generally consistent with the simulation ones. The deviation between the testing and simulating is mainly because the half-sine wave shock acceleration applied to the micro-switch in the test is not ideal as in the simulation. In addition, the electroplated Ni as the device structure generally has a smaller Young’s modulus than the block Ni used in the simulation.Keywords:inertia switch, contact-enhanced, shock-resistibility, synchronous follow-up electrodes, non-silicon surface micromachining technology目录摘要 (I)ABSTRACT .................................................................................................................................... I II 目录. (i)第一章绪论.................................................................................................................................... - 1 -1.1MEMS惯性开关的研究背景..................................................................................... - 1 -1.1.1微机电系统(MEMS)概述.................................................................................... - 1 -1.1.2 MEMS的发展阶段.................................................................................................... - 1 -1.1.3 MEMS技术的应用.................................................................................................... - 3 -1.1.4 MEM惯性传感器简介 .............................................................................................. - 3 -1.2 MEMS惯性开关和其性能参数........................................................................................... - 4 -1.2.1 MEMS惯性开关简介................................................................................................ - 4 -1.2.2 MEMS惯性开关的性能参数.................................................................................... - 5 -1.3 MEMS相关制造技术........................................................................................................... - 6 -1.4 MEMS惯性开关的发展史................................................................................................... - 7 -1.4.1国外研究现状............................................................................................................. - 7 -1.4.2国内研究现状........................................................................................................... - 16 -1.5本文的研究意义以及主要内容......................................................................................... - 29 -参考文献.............................................................................................................................. - 33 -第二章接触增强和高抗过载MEMS惯性开关结构设计 ............................................................ - 41 -2.1 MEMS惯性开关的基本物理模型 ..................................................................................... - 42 -2.2 MEMS惯性开关的性能参数分析 ..................................................................................... - 45 -2.2.1 阈值加速度讨论...................................................................................................... - 46 -2.2.2 响应时间分析.......................................................................................................... - 48 -2.2.4 接触时间讨论.......................................................................................................... - 50 -2.3 MEMS惯性开关的柔性接触机制分析 ............................................................................. - 53 -2.4垂直驱动接触增强的MEMS惯性开关设计与优化 ........................................................ - 58 -2.4.1 十字交叉梁柔性固定电极刚度的计算.................................................................. - 60 -2.4.2 MEMS惯性开关仿真计算...................................................................................... - 63 -2.5水平驱动MEMS惯性开关设计与优化 ............................................................................ - 68 -2.5.1 两电极间距和过载加速度对响应时间的影响...................................................... - 70 -2.5.2 限位紧密约束结构的功能...................................................................................... - 73 -2.5.3 可动电极L型悬臂梁的应力分布.......................................................................... - 74 -2.5.4 加速度载荷脉宽对响应时间和接触时间的影响.................................................. - 76 -目录2.6水平驱动具有同步跟随电极的MEMS惯性开关 ............................................................ - 79 -2.6.1 同步跟随电极对接触时间的影响.......................................................................... - 80 -2.6.2 限位紧密约束结构对接触弹跳行为的影响.......................................................... - 82 -2.7 惯性开关在敏感反方向高g加速下抗过载能力研究..................................................... - 84 -2.7.1 物理模型和理论分析.............................................................................................. - 85 -2.7.2 惯性开关抗过载仿真分析...................................................................................... - 88 -2.8 本章小结............................................................................................................................. - 91 -参考文献.............................................................................................................................. - 94 -第三章接触增强和高抗过载MEMS惯性开关制作工艺研究 .................................................... - 99 -3.1 MEMS惯性开关的工艺路线设计 ..................................................................................... - 99 -3.2 惯性开关的工艺制造难点............................................................................................... - 100 -3.3 主要工艺研究................................................................................................................... - 104 -3.3.1 玻璃基板的清洗.................................................................................................... - 104 -3.3.2 溅射工艺................................................................................................................ - 105 -3.3.3 光刻工艺................................................................................................................ - 106 -3.3.4 电镀工艺................................................................................................................ - 108 -3.3.5 释放工艺................................................................................................................ - 109 -3.4 工艺流程.......................................................................................................................... - 111 -3.5 本章小结........................................................................................................................... - 117 -参考文献............................................................................................................................ - 119 -第四章MEMS惯性开关的接触增强和抗过载性能测试 ........................................................... - 120 -4.1 接触增强和高抗过载MEMS惯性开关特性测试 ......................................................... - 120 -4.1.1 实验设备和测试原理............................................................................................ - 120 -4.1.2 MEMS惯性开关的阈值加速度和接触时间测试 ................................................ - 122 -4.1.3 惯性开关的抗过载性能测试................................................................................ - 130 -4.1.4惯性开关的接触电阻测试..................................................................................... - 135 -4.2 本章小结........................................................................................................................... - 136 -参考文献............................................................................................................................ - 138 -第五章总结与展望........................................................................................................................ - 139 -致谢 ............................................................................................................................................. - 144 -攻读博士学位期间发表的学术论文.............................................................................................. - 146 -第一章绪论1.1 MEMS惯性开关的研究背景1.1.1微机电系统(MEMS)概述MEMS是微机电系统(Micro-Electro-Mechanical Systems)的缩写,在欧洲,MEMS被称为“微系统”;在美国或其他地方,人们将其称为微机电系统(Micro Electro Mechanical System);在日本称之为微机械。
MEMS高g加速度传感器高过载能力的优化研究

0 05 ) 3 0 1
( 中北大学 电子 测试 技术 重点实验室 , 太原
摘 要 :设计的M M 高 g ES 加速度传感器抗高过载能力差, 将导致在冲击等恶劣环境中应用时结构易破坏。通过
分析传感器结构对其抗过载 能力 的影 响 , 及在高 冲击测试 中传 感器结构 损坏情况 的统计 , 出了一种新颖 的优化高 g 提 加 速度传感器抗高过载能力 的方法 。该方法是在结构 最易断裂的梁根部和端部添加倒角 , 以分散在冲击作用下传感器结构 这些部位受到 的应力 , 进而提高加速度传感器的高过载能力 , 并从理论仿真分析 了该方法 的可行性 。最后利用 H p isn okno 杆测试方法对优化前后 的加速度传感 器进 行冲击测试 , 测试结果表 明 , 加速度计 的抗 高过载 能力 从 100 0g 高到 2 0 8 0 提 4 0 0g 说明该优化方法显著 , 0 , 明显提高了该类加速度传感器 的抗 高过 载能力 , 设计 的加速 度传感 器达 到了较理 想 的抗 高
Fi 1 g. Th t tr fhg g a c l rto e s r e sucu e o ih— c e e ain s n o
采 用标 准 加 工工 艺 加工设 计 的 加速 度传 感
器 , 过 H p isn杆 测 通 o kno
试高 g加 速度 传 感 器 的
的高过载压阻式加速度传感器 77 A 频 响可ห้องสมุดไป่ตู้到 20 20 , 0
基金项 目:山西省青年学术带头人资助和新世纪优秀人才支持计划资助 收稿 日 : 00— 5一 O 修改稿 收到 日 : 1 0 — 6 期 21 0 t 期 2 0— 7 1 0 第一作者 石云波 男 , 博士生 , 副教授 , 7 1 2年生 9
高过载三维MEMS加速度传感器敏感芯片设计仿真与优化

(、1‘),
-、
Ⅳ
式中:,rl,11",分别为纵向和横向压阻系数;el,£。为电 阻沿纵向和横向的应变;E为弹性模量。
第29卷第6期 2 0 0 8年6月
兵
工
学
报
ACTA ARMA MENTARII
Vd.29 No.6 Jun.2008
高过载三维MEMS加速度传感器敏感 芯片设计仿真与优化
张振海1,李科杰1,任宪仁1,刘俊2
(1.北京理工大学机电工程与控制国家级重点实验室,北京100081;2.中北大学电子测试技术国家重点实验室。山西太原030051)
Ry4=Rzt=Rz2=Rz3=Rz4=Ro.
三轴向力敏电阻布设示意图如图3所示。X 轴向加速度测试由Rxl,Rx2,Rx3,Rx4 4个力敏电 阻构成。Rxl,Rx4和Rx2,Rx3分别设置在正方形环 型膜片外槽和内槽边缘的上表面,沿着(100)晶面内
压阻系数最大的两个晶向布设,Rxl,Rx2位于[011] 晶向,Rx3,Rx4位于[011]晶向。
美国陆军研究实验室设计的三维加速度传感器 是利用Endevco公司的70型单轴高g值加速度传 感器,在3个互相垂直的方向上,表面安装3个各自 独立的单维压阻式加速度传感器。由于多个惯性质 量块的存在使质心不一致,产生测量方面的误差,且 整个传感器的体积相对较大。
美国Ann Asbor大学的Junseok Chae博士等人 提出微量程三维电容式加速度传感器。采用独立结 构分别对X、y、Z三轴向加速度进行测量…。加州 大学伯克利分校的Mark Lemkin博士等人提出一 种单芯片微量程CMOS电容式三维加速度传感 器12J。中国科学院合肥智能机械研究所吴仲城、戈 瑜等人提出的是基于厚膜技术的微量程三维加速度 传感器设计方案[3l。到目前为止,国内外还未见单 芯片高g值三维MEMS压阻式加速度的研究文献 公开报道。
高g值高频响微机械加速度计研究

第27卷第5期2005年12月探测与控制学报Journal of D etection&Cont rolVo.l 27No .5Dec .2005*收稿日期:2005 05 31作者简介:余尚江(1968 ),男,河南商城人,高工,在读博士生,主要从事传感器及测试技术研究。
高g 值高频响微机械加速度计研究余尚江1,2,李科杰1(1.北京理工大学机电工程学院,北京 100081;2.总参工程兵科研三所,河南洛阳 471023)摘 要:针对侵彻武器测试过程中冲击过载大和频率范围宽的特点,提出了一种微机械电容式加速度计结构,结构中采用分布在整个芯片上的小电容阵列来代替位于中间的单个大电容器。
利用AN S Y S 对加速度计进行了仿真分析,得出加速度计的固有频率超过600k H z ,抗过载能力超过200000g ,且电容变化量大,灵敏度高。
文中还给出了加速度计芯片的加工工艺流程和接口电路。
关键词:加速度;微机械;高g ;有限元分析中图分类号:T J 430.6 文献标识码:A 文章编号:1008 1194(2005)05 0030 04Study on H igh -g and H igh -frequencyM icro m achi ned A ccelero meterYU Shang-jiang 12,LI K e-jie1(1.Beiji n g I nstitute o fTechno logy ,Schoo l ofM echatronic Eng ineeri n g ,B eiji n g 100081,Chi n a ;2.The Third Eng i n eer Sc i e ntifi c Research Instit u te of the H eadquarters o f the Gener a l Staf,f Luoyang 471023,Ch i n a)Abst ract :The high overl o ad and w ide frequency response w ill be pr oduced in the pr ocess o f irruption o f penetrator w eapon ,so a m icr o m ach i n ed capacitance accelero m eter is brought for w ard to m easure its over l o ad i n g para m eters .The structure o f t h e accelero m eter adopts an array o f s m all capac itors in the top w afer rather than a b i g capac itor i n the center .U si n g FE M si m ulation by ANSYS ,the results sho w that the nat ura l frequency o f acce lero m eter is m ore than 600KH z ,t h e m ax i m um of overload m easure m ent exceeds 200000g and the large capacitance variati o n m akes the h i g h sensiti v ity of acce lero m eter .A lso the process sequence for the fabrica ti o n of accelero m eter and m easuri n g c ircu it are presen ted in t h is paper .K ey w ords :accelero m eter ;m icro-m achine ;high g ;FE M analysis0 前言随着硬目标侵彻武器研究的不断深入进行,高冲击测量变得尤为重要。
MEMS高g加速度传感器高过载能力的优化分析

MEMS高g加速度传感器高过载能力的优化分析杜彬【摘要】通过设计一个量程为15万克、抗过载为20万克的抗高过载能力的MEMS加速度传感器,分析了多种传感器的利弊,选择压阻式加速度传感器作为研究对象.创建该加速度传感器结构的力学模型,然后在模型上分析其结构的应力、频率及阻尼进行分析,完成结构参数的优化及确定.在ANSYS环境下,通过对结构的静态和模态仿真分析了该传感器的测量范围、安全系数、抗过载性能、频率响应及响应时间,确保该结构在20万克过载环境下可以安全可靠的工作.同时,根据静态应力仿真结果进行压敏电阻位置及结构参数的优化[1].【期刊名称】《山西电子技术》【年(卷),期】2018(000)006【总页数】3页(P19-21)【关键词】高过载;压阻;加速度;传感器【作者】杜彬【作者单位】太原理工大学物理与光电工程学院,山西太原030024;中国电子科技集团公司第二研究所,山西太原030024【正文语种】中文【中图分类】TP212科技的高速进步,伴随着核武器等技术的日新月异的发展,引信及点火技术应用于各类核武器弹药的制造中。
并且对该技术的安全性提出了较高的要求,比如外形小巧、成本低廉等。
MEMS技术的全称是微机电系统技术,该技术的应用能够满足核武器等研究的要求,因此MEMS技术在国内与国外都受到了广泛的关注。
而MEMS高过载加速度传感器是MEMS技术在引信侵彻过程惯性测试与控制的重要组成部分。
关于MEMS高过载加速度传感器的研究结论和应用必将会极大促进多个类型攻击性武器的设计和开发。
1 加速度传感器加速度传感器的主要功能是对加速度值的测试和分析。
通常由质量模块、阻尼系统、弹性系统、感应器和电桥模块等部分组成。
在传感器在测试过程中,通过监视质量模块所受惯性力,利用牛顿第二定律即可计算出加速度值。
按照传感器感应器件的类型,可以把加速度传感器分为压电式、电感式、应变式、压阻式、电容式等几个类别。
MEMS高g加速度传感器是引信技术研究中的关键技术之一,MEMS高g 加速度传感器能够优化当前武器研究领域中的问题,满足现代化社会研究对武器的需求,因此MEMS高g加速度传感器中MEMS技术在军事领域中具有非常高的研究价值,在使用中具有较高的安全性[1]。
复合量程MEMS加速度计抗高过载的优化设计
复合量程MEMS加速度计抗高过载的优化设计徐香菊;朱杰;郭涛;李文燕【摘要】在航空航天及武器系统中,传感器承受很大的冲击,这就要求传感器具有很高的抗高过载能力.文中在原有基础上对复合量程微加速度计中的高低量程模块进行抗高过载设计的优化.试验测得优化后的结构能够抗20000g,能够有效地满足高过载高冲击环境的要求.【期刊名称】《弹箭与制导学报》【年(卷),期】2012(032)005【总页数】3页(P149-151)【关键词】抗高过载;复合量程加速度计;ANSYS【作者】徐香菊;朱杰;郭涛;李文燕【作者单位】中北大学电子测试国家重点实验室,仪器科学与动态测试教育部重点实验室,太原030051;中北大学电子测试国家重点实验室,仪器科学与动态测试教育部重点实验室,太原030051;中北大学电子测试国家重点实验室,仪器科学与动态测试教育部重点实验室,太原030051;中北大学电子测试国家重点实验室,仪器科学与动态测试教育部重点实验室,太原030051【正文语种】中文【中图分类】TP212.60 引言随着社会的发展,传感器阵列的需求越来越高。
在航空航天及武器系统中,加速度范围广,且要求传感器向着多功能、小型轻量方向发展[1]。
传感器阵列不仅要满足灵敏度、线性度等要求,还要求能抗高过载。
复合量程加速度计利用MEMS工艺制造,覆盖高低量程、低功耗、模块化、通用化、体积小和结构强度高等特点。
而低量程传感器模块能否抗高过载环境,对复合量程微加速度计性能十分重要[2]。
在抗冲击试验中,低量程模块比高量程更容易损坏。
这说明加速度计的抗高过载能力还需进一步优化。
1 理论文中低量程加速度计的量程为10g,高量程为10000g。
因结构类似,下面以低量程结构为例进行介绍。
低量程结构经过分析选用双端四梁结构。
在4根梁上分布8个电阻组成惠斯通电桥。
当加速度计受到Z方向的加速度时质量块上下震动,分布在梁上的电阻由于压阻效用会发生变化,电桥有电压输出。
灌封技术对MEMS高g加速度传感器性能影响研究

灌封技术对MEMS高g加速度传感器性能影响研究李策;石云波;刘欣【摘要】Aiming at interference of high frequency signals in harsh environments and failures caused by package, design a high-g MEMS acceleration sensor which has high reliability by means of encapsulation. According to sensor packaging technology, use ANSYS software to establish finite element models,simulate and analyze structure and encapsulation techniques for sensor performance. The results show that encapsulation technology can improve overload capacity and sensitivity,that is to say,a relatively high elastic modulus and low density of the pouring sealant can be effective for the high-overload-resistance ability and high sensitivity of a MEMS high-g accelerometer.%针对恶劣环境下高频信号的干扰与由封装引起的结构失效,设计了一种MEMS高g加速度传感器,通过灌封实现机械滤波,保证封装的可靠性。
根据传感器封装工艺,利用ANSYS软件建立有限元模型,仿真分析了灌封技术对传感器结构和性能。
加速度传感器基于动力学分析的结构优化

加速度传感器基于动力学分析的结构优化摘要:根据加速度传感器大g值、高频响的特点,对传感器的壳体结构运用有限元分析软件进行动力学分析,在振动理论和有限元理论基础上,分析了传感器壳体结构系统的固有频率,并提出的改进方案,通过有限元仿真模拟分析和试验验证,方案证明了传感器壳体结构系统的固有频率可以提高,从而其远超过工作上限频率,加速度传感器的动态特性得到了提升,对确保传感器高频响指标、测量精度保证等具有非常重要的意义。
关键词:动力学特性; 有限元分析; 固有频率0 引言高g(g = 9.8m/s2)值加速度传感器可以称为高量程加速度传感器,广泛的应用于航天、船舶于航天等领域。
最近几年随着军事的快速发展与不断深入研究爆炸中的冲击现象,因此大家也逐渐提高了高g值加速度传感器的要求与需求,传感器需要具有相对较高的宽频响、高谐振频率、灵敏度等特点[1-3]。
目前,高g值加速度传感器国内研究重点在敏感元件的封装、芯片设计等方面。
中国科学院上海微系统与信息技术研究出使用曲面过载保护悬臂梁结构[4],以此研制出程可以达到1×105g压阻式加速度芯片(敏感方向为水平方向),且实现了工程化。
但是,由于工作环境、安装位置等因素,导致大多数情况下无法直接将加速度敏感元件安装在指定位置,需在传感器壳体内进行安装,然后在指定位置上再使用螺钉固定。
在传感器工作过程中,传感器壳体同样承受着环境应力的影响,受外界动态载荷冲击的影响,形成共振,理论上产生的共振频率必须高于敏感元件的基频,否则敏感元件会受到影响,使敏感元件出现增益降低、噪声变大等情况,影响传感器的测量精度,这种影响会随着信号频率的提高而逐渐增大,严重的会出现传感器失效的现象,使整个操作系统受损。
即加速度传感器的壳体不但要对敏感元件起到保护的作用,还需要有良好的动力学特性。
本文在不改变其安装尺寸和方法的前提下,通过对一种高g值的加速度传感器壳体的结构进行动力学分析,采用有限元软件对壳体结构进行优化设计,并通过仿真分析结果,使传感器壳体满足使用要求。
高g值加速度传感器的动态特性研究的开题报告

高g值加速度传感器的动态特性研究的开题报告
一、选题背景及意义
高g值加速度传感器广泛应用于飞行器、导弹和能源勘测等领域,因其具有高精度、高灵敏度和高可靠性等优点。
而我们针对高g值加速度传感器的动态特性进行研究,有助于深入了解其内部结构、工作原理,从而更好地优化传感器的性能,提高生产制造效率,满足市场需求。
二、研究目的
1.了解高g值加速度传感器的工作原理和内部结构;
2.研究传感器在高加速场合下的动态性能;
3.探究如何提高高g值加速度传感器的灵敏度和精度。
三、研究方法
本研究采用实验和仿真两种方式进行。
1.实验方法:使用高速旋转器和气炮等设备,对高g值加速度传感器进行不同距离、各方向等高加速场合下的测试,并记录测试结果,分析传感器的动态特性。
2.仿真方法:利用有限元仿真软件,建立高g值加速度传感器的模型,并分析模型在不同条件下的模拟结果,以更好地探究传感器的动态特性。
四、预期结果
通过实验和仿真两种方法,我们预计能够探究出高g值加速度传感器在不同条件下的动态特性,为其性能的优化和提升提供可靠的数据支持。
五、研究意义
本研究将有助于深入了解高g值加速度传感器的工作原理和内部结构,提高传感器的精度和灵敏度,以便更好地满足市场需求和提高企业产品竞争力。
同时,该研究成果还可以应用于其它种类加速度传感器的相关研究,推动加速度传感器相关领域的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采 用标 准 加 工工 艺 加工设 计 的 加速 度传 感
器 , 过 H p isn杆 测 通 o kno
试高 g加 速度 传 感 器 的
Absr c t a t: T tu t r o b a u e se s o d sr y i sg e he sr c u e t e me s r d i a y t e to fa de in d MEMS h g g a c l r to e s rh sl s - ih— c e e ain s n o a e s o e la blt n ti s d i a s mp c nvr n n .Th o g n lzn h fe to e s rsr c u e o t n i v ro d a i y a d i s u e n h rh i a te io me t i r u h a ay i g t e efc fa s n o tu t r n isa t-
o e l a a a i n olc i g i t cu a a g tt t si ih i a tt s n v ro d c p ct a d c l t t s u t r ld ma e sai i n h g mp c e t g,a n w meh d wa u owa d,i y e n s r sc i e t o s p tf r r t
石 云波 ,李 平 ,朱正强 ,刘 俊 ,张晓明
0 05 ) 3 0 1
( 中北大学 电子 测试 技术 重点实验室 , 太原
摘 要 :设计的M M 高 g ES 加速度传感器抗高过载能力差, 将导致在冲击等恶劣环境中应用时结构易破坏。通过
分析传感器结构对其抗过载 能力 的影 响 , 及在高 冲击测试 中传 感器结构 损坏情况 的统计 , 出了一种新颖 的优化高 g 提 加 速度传感器抗高过载能力 的方法 。该方法是在结构 最易断裂的梁根部和端部添加倒角 , 以分散在冲击作用下传感器结构 这些部位受到 的应力 , 进而提高加速度传感器的高过载能力 , 并从理论仿真分析 了该方法 的可行性 。最后利用 H p isn okno 杆测试方法对优化前后 的加速度传感 器进 行冲击测试 , 测试结果表 明 , 加速度计 的抗 高过载 能力 从 100 0g 高到 2 0 8 0 提 4 0 0g 说明该优化方法显著 , 0 , 明显提高了该类加速度传感器 的抗 高过 载能力 , 设计 的加速 度传感 器达 到了较理 想 的抗 高
ME MS高 g值 加 速 度计 主要 用 于 高 速运 动 的 载体 在启 动 和运 行过程 中速度 变 化 的测量 与控 制 , 广泛 应 用 在航 空航天领 域 以及 导 弹和智 能 化炮 弹 的精 确控 制上 ,
kz H 。我 国在 高 g传 感 器 方 面 还 是 以压 电结 构 为 主 。
c u d o tmie t e o e la -e it n b lt fa h g g a c l r to e s r o l p i z h v ro d r ssa ta iiyo ih— c ee a in s n o .W ih t smeh d,c a e swe e a d d a o t t hi t o h mf r r d e tr o a d e d o e m e n h at mo te sl o b r k n i a s n o t c u e n o d rt ip re t e sr s fs c n n fa b a b i g t e p r s a iy t e b o e n e s r sr t r i r e o d s e s h te s o u h u a e s W h n i a tla s wee e e d o e o t cur i c ul n r a e t e h【h o e la —e it n b l y.Th ra . e mp c o d r x  ̄e n a s ns r sr t e, t o d i c e s h i — v ro d r ssa ta i t u g i e
时 , 的根部 和端 部受 到 的应 力 最大 , 结 构 中 出现 最 梁 对 大应 力 的部位 作 局 部 分 析 , 臂 梁 上 局 部 应 力 云 图如 悬 图 5所示 , 图中分 析得 到 , 大应 力 分 布在 悬臂 梁 的 从 最 根 部与边 框 相 连处 , 对称 分 布 在 悬 臂 梁 的上 表 面 和 且
架
下表面处 。
表 1 不 同倒 角 大 小 的仿 真 数 值 表
Ta b.1 The sm ulto lr z t n fe e ha f r sz i a i na e uls o di r ntc m e i e
( 正视 图度传感器 的结构 图
梁的端 部 。
2 抗 过 载 能 力 的优 化
2 1 优 化方 法 .
高 g值 加速 度传 感 器结 构 在 冲击测 试 中普 遍 存在 的 问题 是沿 梁 的 端 部 或根 部 易 断 裂 , 计 的加 速 度传 设
感器在 100 0g作用下 的应 力分 布如 图 4所 示 。 5 0 从 图 4中分 析 可 得 , 加 速 度 传 感 器 受 到 高 冲击 当
的高过载压阻式加速度传感器 77 A 频 响可达到 20 20 , 0
基金项 目:山西省青年学术带头人资助和新世纪优秀人才支持计划资助 收稿 日 : 00— 5一 O 修改稿 收到 日 : 1 0 — 6 期 21 0 t 期 2 0— 7 1 0 第一作者 石云波 男 , 博士生 , 副教授 , 7 1 2年生 9
因此, 对该类传感器以及由此构成的 M M E S系统的研究 具有重大意义。M M E S高 g 值加速度传感器 主要在 冲 击 、 炸、 爆 侵彻等恶 劣环境 中应 用 , 在这些环境 中应用时 , 对高 g 加速度传感器的抗过载能力有严格 的要求 , 否则 会导致传感器结构损坏 , 测试得不到有效信号 J 卫。 美 国 E D V O公司研制出了量程可达 2000g N EC 0 0
振
动
与
冲
击
Vo. 0 No 7 2 1 I3 . 0l
第
厂 3 0卷第 7期
J OURNAL OF VI BRAT ON I AND HOCK S
十
+
_ 十 } 科 + 一 一 + _ } 简 报 研一
一 一
、0● T0
ME MS高 g加 速 度传 感 器 高 过载 能 力 的优 化研 究
北京大学微 电子所研制 的压 阻式高 g 加速度传感 值
器 , 程 为 5 0 , 侵彻 等 环 境 下 的超 高 过 载需 求 量 000g 对 仍 未 达到 应用 标准 。 本文 根 据设 计 的高 g加速 度 传感 器 抗过 载 能力 不 足 , 化设 计 了 一种 新 型 的 压 阻 式 高 g加 速 度 传 感 器 优
f a i i t f h t o a n lz d w t h o e ia i l t n .T e e s l y o e meh d w s a ay e i t e r t lsmu a i s h n,s n o s w r e td wi p i s n b ri a t b i t h c o e s r e e t se t Ho k n o a mp c h ts meh d h e t e u ti dc t d t a eh g — v ro d r ssa tc p c t fa c ee o t ro t z d c n b as d e t t o .T e ts r s l n iae t h i h o e l a —e i n a a i o n a c l rmee p i e a e r ie h t t y mi
过载能力 。
关键词 :ME MS高 g加速度传感器 ; 高过 载 ; okno H p isn杆冲击测试 ; 倒角 ; 优化
中图分类号 :T 2 2 P 1 文献标识码 :A
Hi h v r o d a iiy o tm i a i n o EM S hi h- c ee o e e g o e l a b lt p i z to fa M g g a c lr m t r
结构 , 通过在高过载测试 中结构最易断裂 的悬臂梁根 部和端部添加倒角的方法来提高加速度传感器结构 的 牢靠性 , 而提 高 加 速 度传 感 器 的抗 高 过 载 能 力。 进 Hpi o ok s n n杆冲击测试 方法对优化前后 的加 速度传感 器进行冲击测试 , 测试结果表 明, 加速度计 的抗高过载 能力从 1000g 8 0 提高到 2000g 说明该优化方法明 4 0 , 显提高了该类加速度传感器结构的抗高过载能力 。
fo 1 0, 0 o 2 0, 0 . I s s o ha he p o o e t o c n oa l n r a e t e hih— v ro d-e it n r m 0 0g t 4 0 0g twa h wn t t t r p s d meh d a n t b l i c e s h g o e l a r ssa e 8 y a ii fa MENS h g g a c lr mee . b lt o y ih— c e e a tr Ke y wor ds: MEMS h g g a c lr me e ih— c e eo tr;h g v ro d;Ho k n o a mp c e t h mf r p i z to ih o e la p i s n b r i a tts ;c a e ;o t miain
22 7
振 动 与 冲 击