L298 中文资料 说明
L298N步进电机驱动器使用说明
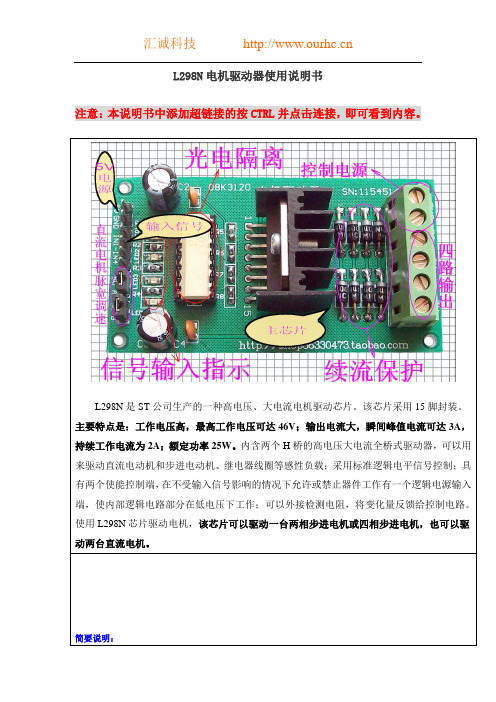
L298N电机驱动器使用说明兴创科技L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流~;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
(完整版)L298N芯片的介绍
(完整版)L298N芯片的介绍L298N芯片的介绍3.1 L298N芯片的介绍L298是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片的主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器、线圈等感性负载;采用标准TTL逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作;有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
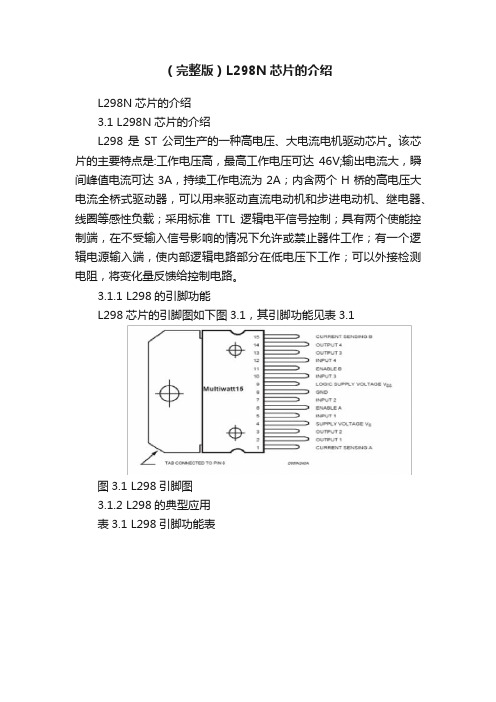
3.1.1 L298的引脚功能L298芯片的引脚图如下图3.1,其引脚功能见表3.1图3.1 L298引脚图3.1.2 L298的典型应用表3.1 L298引脚功能表L298的运行参数表3.2 L198的运行参数L298的逻辑控制L298的逻辑控制见如下表3.3。
其中C、D分别为IN1、IN2或IN3、IN4;L为低电平,H 为高电平,※为不管是低电平还是高电平。
表3.3 L298对直流电机控制的逻辑真值表输入输出Ven=H C=H;D=L 正转C=L;D=H 反转C=D 制动Ven=L C=※;D=※没有输出,电机不工作L298有Mutiwatt15和PowerSO20两种封装MW.15的1、15和PowerSO的2、19用法一样,SEN1、SEN2分别为两个H桥的电流反馈脚,不用时可以直接接地(MW.15)2、3=(PowerSO)4、5,1Y1、1Y2输出端,与对κ淙攵耍ㄈ?A1与1Y1)同逻辑4=6,VS驱动电压,最小值须比输入的低电平电压高2.5v5、7=7、9,1A1、1A2输入端,TTL电平兼容6、11=8、14,1EN、2EN使能端,低电平禁止输出8=1、10、11、20,GND地9=12,Vss逻辑电源,4.5--7V10、12=13、15,2A1、2A2 输入端,TTL电平兼容13、14=16、17,2Y1、2Y2 输出端------=3、18,NC,无连接。
L298N中文资料

L298N中文资料步进电机驱动芯片L298中文资料双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver )L298中文资料L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。
L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路; OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图图10 L298 内部逻辑图L298 ABSOLUTE MAXIMUM RATINGS 绝对最大额定值: Symbol符号Parameter 参数Value数值单位VSPower Supply 电源50VSSLogic Supply Voltage 电源电压7VVI,VenInput and Enable Voltage 输入电压和启用–0.3 to 7VIO峰值输出电流(每通道)非重复性(t= 100ms)3重复(80% on –20% off; ton = 10ms) 2.5直流运行2VsensSensing Voltage 感应电压–1 to 2.3VPtotTotal Power Dissipation (Tcase=75℃)总功率耗散(Tcase=75 ℃)25WTopJunction Operating Temperature 结工作温度–25 to 130℃Tstg,TjStorage and Junction Temperature 储存温度–40 to 150℃L298 PIN FUNCTIONS (refer to the block diagram) 引脚功能(请参阅框图):PowerSONameFunction 功能说明1;152;19Sense A; Sense B 引脚电流监测端,1、15和PowerSO的2、19用法一样,SEN1、SEN2分别为两个H桥的电流反馈脚,不用时可以直接接地2;34;5Out 1; Out 21Y1、1Y2输出端46VS功率电源电压,此引脚与地必须连接100nF电容器 5;77;9Input 1; Input 21A1、1A2输入端,TTL电平兼容6;118;14Enable A; Enable BTTL电平兼容输入 1EN、2EN使能端,低电平禁止输出 81,10,11,20GNDGND地912VSS逻辑电源电压。
【2018-2019】l298n中文资料-实用word文档 (9页)

本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==l298n中文资料篇一:L298N中文资料L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A 五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
L298N电机驱动器_共地说明书
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下: 两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)通电控制脉冲必须严格按照这一顺序分别控制A,B 相的通断。
)2、两相四线步进电机的四拍工作方式,其各相通电顺序为: (A -AB -B -BA ’-A ’-A ’B ’-B ’-B ’依次循环。
(出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用八拍工作方式)(2)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
如:正转通电顺序是:(A-B-A’-B’依次循环。
)则反转的通电顺序是:(B‘-A’-B-A依次循环。
)参考下例:(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
参考下例:(4)四相电机的控制程序以下为参考程序:实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
L298N电机驱动器使用说明书

L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)4.控制信号指示灯5.光电隔离(抗干扰) 6.核心芯片(L298N)7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
L298N资料
IN2
X 0 1 0 1
ENA
0 1 1 0 0
电机状态
停止 顺时针 逆时针 停止 停止
电机驱动模块连接图
• L298有两路电源分别为逻辑电源和动力电源,上 图中6V为逻辑电源,12V为动力电源。J4接入逻 辑电源,J6接入动力电源,J1与J2分别为单片机 控制两个电机的输入端,J3与J5分别与两个电极 的正负极相连。 • ENA与ENB直接接入6V逻辑电源也就是说两个电 机时刻都工作在使能状态,控制电机的运行状态 只有通过J1与J2两个接口。 • 由于我们使用的电机是线圈式的,在从运行状态 突然转换到停止状态和从顺时针状态突然转换到 逆时针状态时会形成很大的反向电流,在电路中 加入二极管的作用就是在产生反向电流的时候进 行泄流,保护芯片的安全。
L298驱动芯片
• L298N是SGS公司的产品,内部包含4通道 逻辑驱动电路。是一种二相和四相电机的 专用驱动器,即内含二个H桥的高电压大电 流双全桥式驱动器,接收标准TTL逻辑电平 信号,可驱动46V、2A以下的电机。
• 其实物及引脚图如下所示:
实物图
管脚图
L298的逻辑功能
•
IN1
X 1 0 0 1
l298n

l298nL298N是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。
其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。
当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。
4脚VS接电源电压,VS电压范围VIH为+2.5~46V。
输出电流可达2A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
EnA,EnB接控制使能端,控制电机的停转。
下图是L298N 内部原理图。
二、L298N中文资料汇总—L298N引脚图及功能LN298引脚图L298N逻辑功能表In3,In4的逻辑图与表1相同。
由表1可知EnA为低电平时,输入电平对电机控制起作用,当EnA为高电平,输入电平为一高一低,电机正或反转。
同为低电平电机停止,同为高电平电机刹停。
三、L298N中文资料汇总—L298N工作原理L298N控制器原理如下:图3是控制器的示意图,它由三个虚线框图组成。
(1)虚线框图1控制电机正反转,U1A,U2A是比较器,VI来自炉体压强传感器的电压。
当VI>VRBF1时,U1A输出高电平,U2A输出高电平经反相器变为低电平,电机正转。
同理VI<VRBF1时,电机反转。
(完整)L298N的介绍

驱动芯片L298N的介绍L298是SGS(通标标准技术服务有限公司)公司的品,比较常见的是15脚Multiwatt封装的L298N,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机.其引脚排列如上图中所示。
:L298N的引脚9为LOGIC SUPPLY VOLTAGE Vss,即逻辑供应电压。
引脚4为SUPPLY VOLTAGE Vs,即驱动部分输入电压。
Vss 电压要求输入最小电压为4.5V,最大可达36V;Vs电压最大值也是36V,但经过我的实验,Vs电压应该比Vss电压高,否则有时会出现失控现象.它的引脚2,3,13,14为L298N芯片输入到电动机的输出端,其中引脚2和3能控制两相电机,对于直流电动机,即可控制一个电动机。
同理,引脚13和14也可控制一个直流电动机。
引脚6和11脚为电动机的使能接线脚。
引脚5,7,10,12为单片机输入到L298N芯片的输入引脚。
下表是其使能、输入引脚和输出引脚的逻辑关系:EN A(B)IN1(IN3)IN2(IN4)电机运行情况H H L 正转H L H 反转H 同IN2(IN4)同IN1(IN3) 快速停止L X X 停止控制使能引脚ENA或者ENB就可以实现PWM脉宽速度调整。
马云任志强李嘉诚柳传志史玉柱1脚和15脚可单独引出连接电流采样电阻器,形成电流传感信号,也可以直接接地。
在可设计中就将它们直接接地。
L298N是内含二个H桥的高电压大电流双全桥式驱动器可驱动46v,2A以下电机,1和15脚可单独引出接电流采样电阻器,形成电流传感信号。
接错无法控制电机。
引脚8为芯片的接地引脚,它与L298N芯片的散热片连接在一起.由于本芯片的工作电流比较大,发热量也比较大,所以在本芯片的散热片上又连接了一块铝合金,以增大它的散热面积。
该芯片的一些参数如下:(1)逻辑部分输入电压:6~7V(2)驱动部分输入电压Vs:4.8~46V(3) 逻辑部分工作电流Iss:≤36mA(4)驱动部分工作电流Io:≤2A(5) 最大耗散功率:25W(T=75℃)(6)控制信号输入电平:高电平:2。
l298n
L298NL298N 是一种双 H-桥电机驱动芯片,可用于控制直流电机或步进电机。
它广泛应用于机器人、小车、无人机和其他需要精确控制电机的项目中。
本文将详细介绍L298N 的工作原理、连接方式以及一些常见问题的解决方法。
工作原理L298N 由两个 H-桥组成,每个 H-桥由四个开关管组成。
这些开关管由输入信号控制,以控制电机的转向和速度。
当两个开关管打开时,电机就会沿着一个方向旋转;当两个开关管关闭时,电机会沿着另一个方向旋转。
通过改变开关管的开闭状态和输入信号的时序,可以实现电机的精确控制。
连接方式L298N 的引脚功能如下所示:•EN1:使能电机1,用于控制电机1的转速。
•IN1、IN2:控制电机1的方向。
•EN2:使能电机2,用于控制电机2的转速。
•IN3、IN4:控制电机2的方向。
•VM:电机供电电源(4.8-35V)。
•GND:地。
•OUT1、OUT2:电机1输出。
•OUT3、OUT4:电机2输出。
以下是连接 L298N 的步骤:1.将VM连接到电机的正极,将地线连接到电机的负极。
2.将电机1的正极连接到OUT1,负极连接到OUT2。
3.将电机2的正极连接到OUT3,负极连接到OUT4。
4.使用导线将EN1连接到微控制器的输出引脚,以控制电机1的转速。
5.使用导线将IN1和IN2连接到微控制器的输出引脚,以控制电机1的转向。
6.使用导线将EN2连接到微控制器的输出引脚,以控制电机2的转速。
7.使用导线将IN3和IN4连接到微控制器的输出引脚,以控制电机2的转向。
常见问题与解决方法1. 电机运转不稳定这可能是由于电源供电不稳定或驱动芯片过热导致的。
解决方法包括:•使用稳定的电源供电。
确保电源电压在规定范围内。
•添加散热器以降低驱动芯片的温度。
•降低电机的负载,避免过度功率消耗。
2. 电机转向错误这可能是由于输入信号控制错误或引脚连接错误导致的。
解决方法包括:•检查输入信号的时序和引脚连接是否正确。
L298N的详细资料
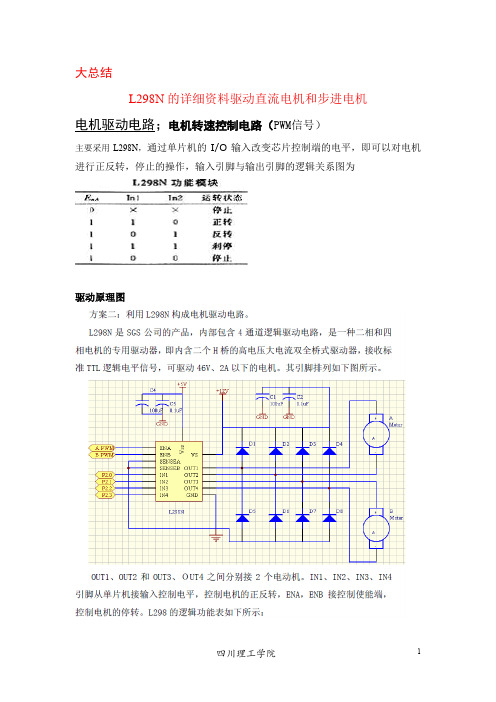
大总结L298N的详细资料驱动直流电机和步进电机电机驱动电路;电机转速控制电路(PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图--------------------------------------------------------L298N电机驱动模块图••1.1 实物图••1.2 原理图•••1.3 各种电机实物接线图•••1.4 各种电机原理图•••1.5 模块接口说明•••L298N电机驱动模块图1.1 实物图正面背面1.2 原理图1.3 各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5 模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
我正在用L298N驱动我的小车的两个直流减速电机,其实它很好用,1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3, 输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
L298N中文资料

L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)如图:按CTRL并点击(L298N驱动器与直流电机接线图)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
电机驱动芯片L298N简介
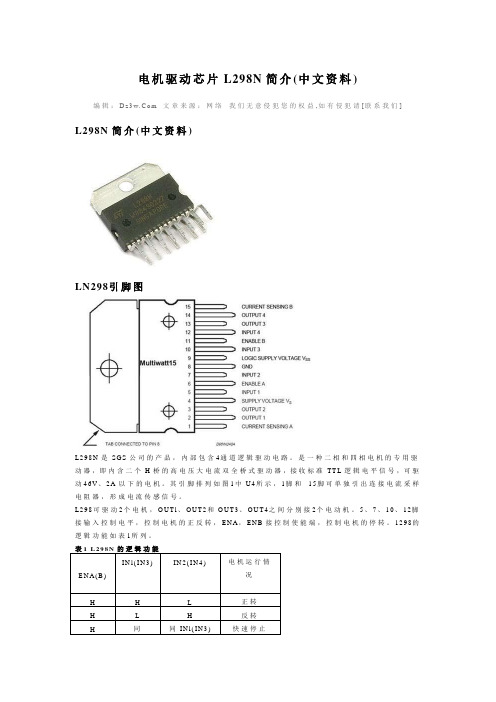
电机驱动芯片L298N简介(中文资料) 编辑:D z3w.C o m文章来源:网络我们无意侵犯您的权益,如有侵犯请[联系我们]L298N简介(中文资料)LN298引脚图L298N是S G S公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准T T L逻辑电平信号,可驱动46V、2A以下的电机。
其引脚排列如图1中U4所示,1脚和15脚可单独引出连接电流采样电阻器,形成电流传感信号。
L298可驱动2个电机,O U T l、O U T2和O U T3、O U T4之间分别接2个电动机。
5、7、10、12脚接输入控制电平,控制电机的正反转,E N A,E N B接控制使能端,控制电机的停转。
1298的逻辑功能如表1所列。
表1L298N的逻辑功能E N A(B)I N l(I N3)I N2(I N4)电机运行情况H H L正转H L H反转H同同IN l(I N3)快速停止图9L298引脚图图10L298内部逻辑图L298A B S O L U T E M A X I M U M R AT I N G S绝对最大额定值:S y m b o l 符号P a r a m e t e r参数Va l u e数值单位V S P o w e r S u p p l y50VH压(引脚6,11)SI e n= L L o w Vo l t a g e E n a b l e C u r r e n t(p i n s6,11)低电平启动电流Ve n=L–1μAI e n= H H i g h Vo l t a g e E n a b l e C u r r e n t(p i n s6,11)高电平启动电流Ve n=H≤V S S–0.6V3010μAV C E s at(H)S o u r c e S a t u r a t i o n Vo l t a g eI L =1A0.951.351.7VI L =2A2 2.7V C E s at(L)S i n k S a t u r a t i o n Vo l t a g eI L =1A (5)0.851.2 1.6VI L =2A (5) 1.7 2.3V C E s at To t a l D r o pI L =1A (5)1.83.2VI L =2A (5) 4.9V s e n s S e n s i n g Vo l t a g e电流监测电压(引脚1,15)–1(1)2V。
L298N电机驱动板用户手册说明书
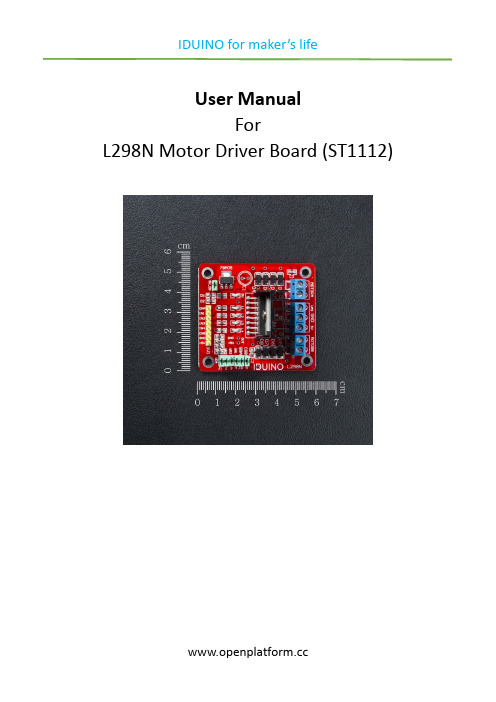
User ManualForL298N Motor Driver Board (ST1112)1. IntroductionDouble H driver module uses ST L298N dual full-bridge driver, an integrated monolithic circuit in a 15- lead Multiwatt and PowerSO20 packages. It is a high voltage, high current dual full-bridge driver designed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors. Two enable inputs are provided to enable or disable the device independently of the input signals. The emitters of the lower transistors of each bridge are connected together and the corresponding external terminal can be used for the con-nection of an external sensing resistor. An additional supply input is provided so that the logic works at a lower voltage.Specification:∙Driver: L298N∙Driver power supply: +5V/DC to +35V/DC∙Driver Io: 2A∙Logic power output Vss: +5/DC to 7V/DC (internal supply +5V/DC)∙Logic current: 0 - 36mA∙Controlling level: Low -0.3V/DC to 1.5V/DC, high: 2.3V/DC to Vss∙Enable signal level: Low -0.3V/DC to 1.5V/DC, high: 2.3V/DC - Vss∙Max power: 25W (Temperature 75 cesus)∙Working temperature: -25℃to +130℃2. Pin Instruction3. ExampleThis module can drive 2 channel DC motor or 2 phase stepper motor. For 2 channel DC motor, connection and code as below: Connection:IN1==========13;IN2==========12;IN3==========11;IN4==========10;********Code begin********int in1=13;int in2=12;int in3=11;int in4=10;int speedPinA=6;int speedPinB=5;void setup(){pinMode(in1,OUTPUT);pinMode(in2,OUTPUT);pinMode(in3,OUTPUT);pinMode(in4,OUTPUT);digitalWrite(in1,HIGH);digitalWrite(in2,HIGH);digitalWrite(in3,HIGH);digitalWrite(in4,HIGH);}void loop(){_mRight(in1,in2);_mRight(in3,in4);int n=analogRead(A0)/4;_mSetSpeed(speedPinA,n);_mSetSpeed(speedPinB,n);}void _mRight(int pin1,int pin2){digitalWrite(pin1,HIGH);digitalWrite(pin2,LOW);}void _mLeft(int pin1,int pin2){digitalWrite(pin1,LOW);digitalWrite(pin2,HIGH);}void _mStop(int pin1,int pin2){digitalWrite(pin1,HIGH);digitalWrite(pin2,HIGH);}void _mSetSpeed(int pinPWM,int SpeedValue{analogWrite(pinPWM,SpeedValue);}********Code End********For 2 stepper motor the connection and code as below: Connection:IN1=======8;IN2=======9;IN3=======10;IN4=======11;******Code begin******#include <Stepper.h>#define STEPS 100Stepper stepper(STEPS, 8, 9, 10, 11);int previous = 0;void setup(){stepper.setSpeed(90);}void loop(){int val = analogRead(0); stepper.step(val - previous);previous = val;}******Code End******。
L298N步进电机驱动器使用说明
L298N电机驱动器使用说明兴创科技xchuangkj.taobao.L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流4.5~5.5V;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
l298n中文资料_数据手册_参数

L298N中文资料第7页精选内容:图7:对于较高的电流,输出可以并联.注意平行通道1与通 道4和通道2与通道3.应用信息(参考框图) 1.1.电源输出阶段 L298集成了两个动力输出阶段 (A??; B).功率输出级是桥式配置其输出可以驱动一个电感负载,周期性或差异性模式,取 决于状态输入.流过负载的电流在这个意义上,从桥上出来:an 外部电阻(R SA ; R SB .)允 许检测内部 电阻这种电流的张力. 1.2.输入阶段每座桥都由四个门驱动,放入其中In1; In2; EnA和In3; In4; ENB. In输入设置桥接状态高 ; En输入的低状态抑制了桥接.所有的输入都是 TTL兼容的. 2.建议一个非感应电容器,通常为100nF,必须在Vs和Vss之间预见到地面,尽可 能靠近GND引脚.当大的ca-电源的供应商离IC太远了第二小的一个必须预见在附近 L298.感 应电阻器,不是线绕式的,必须的必须在VL298Ns的负极附近接地靠近IC的GND引脚每个 输入必须连接到的源通过非常短的路径驱动信号.打开和关闭:在打开Sup-在关闭电源之 前,Enablein-必须把它驱动到Low状态. 3.应用程序图6显示了一个双向直流电机控制Schematic只需要一个桥的图.二极管D1到D4的外部电桥是由四个快速恢复元素(trr ≤200纳秒) 必须选择尽可能低的VF负载电流的最坏情况.感测输出电压可以用来控制通过斩波输入来实 现电流幅度,通过切换低电L298N平来实现过流保护,能够输入.制动功能(快速电机停 止)要求 2安培的绝对最大额定值必须永远不会被克服.当重复峰值电流需要从负载高于2安 培,并联配置 - 可以选择(见图7).需要在外部连接二极管时,受到负载的驱动和输入的时 候 IC切碎;肖特基二极管L298N将是优选的. L298 7/13图1电路的建议印刷电路板布局 8(1:1 比例).图10:使用电流控制器L6506的双相双极步进电机控制电路 R R 和R sense 取决于负载 电流 L298 9/13灌电流延迟时间与输入0 V启用切换的关系.图6:双向DC电机控制. L =低 H = 高 X =不在乎在pu ts功能 V en = H C = H; D = L前锋 C = L; D = H相反 C = D快速电机停止 引 脚连接(顶视图) GND输入2 VSS NC出1 V S出2输入1启用A感觉A GND 10 8 9 7 6五 4 3 2 13 14 15 16 17 19 18 20 12 1 11 GND D95IN239输入3启用B出3输入4出4 NC感觉B GND绝对最大额 定值塞尔参数值联合国 V S电源 5L298N0 V V SS逻辑电源电压 7 V V I ,V en输入和使能电压 -0.3至7 V 我 哦峰值输出电流(每个通道) - 非重复(t = 100微秒) -Repetitive(80%在-20% off; t on = 10ms) -DC操作 3 2.5 2一个一个一个 V 感觉感应电压 -1?2.3 V P tot 总功耗(T case = 75 C) 25 w ^ T op结工作温度 -25至130 C T stg ,T j存储和结温 -40至150 C热数据塞尔参数 Po werSO20 Mu ltww 15联合国 第j个案例热阻结套最大. - 3 °C / W R th j-amb热阻结环境最大. 13(*) 35 °C / W (*)安装在铝基板上 1 2 3 4五 6 7 9 10 11 8启用B INPUT 3 逻辑电源电压V SS GND输入2启用A输入1 电源电压输出2输出1电流传感器A TAB连接到针脚8 13 14 15 12电 流传感器B输出4输出3输入4 D95IN240A Multiwatt15 PowerSO20 L298 2/13.工作电源电压高达 46 V .总直流电流高达4 A .低饱和电压 .过度保护 .逻辑“0”输入电压高达1.5 V (高噪声免 疫)描述 L298是一款集成的单片电路,引领Multiwatt和PowerSO20封装.它是一个高电压,大 电流双桥全驱动器,签署接受标准的L298NTTL逻辑电平和驱动感性负载,如继电器,螺线 管,直流和步进电机提供两个启用输入启用或禁用设备,放信号.下部晶体管的发射极每个 桥连接在一L298N起,外部终端可以用于会议一个外部电阻器.额外的提供供应输入,使得 逻辑在a处工作电压较低. L298N图中电路的建议印刷电路板布局图. 8(1:1比例).图10:使 用电流控制器L6506的双相双极步进电机控制L298N电路. R R 和R R 取决于负载电流 L298N
L298N中文资料
L298N电机驱动器使用说明书L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A’-B’)通电控制脉冲必须严格按照这一顺序分别控制A,B相的通断。
L298N步进电机驱动器使用说明
L298N电机驱动器使用说明兴创科技是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流~;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
L298N 中文说明
L298N是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。
其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,步进电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。
当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。
为了避免电机对单片机的干扰,本模块加入光耦,进行光电隔离,从而使系统能稳定可靠的工作。
本模块具有体积小,控制方便的特点。
采用此模块定会使您的电机控制自如,可以应对需要大功率步进电机的题目。
本模块具有6个指示灯,能指示步进电机的控制运行状态,便于步进电机初学者学习步进的编程,同时在教学中,也便于演示步进的运行状态。
本模块可控制两相、三相、四相的步进电机。
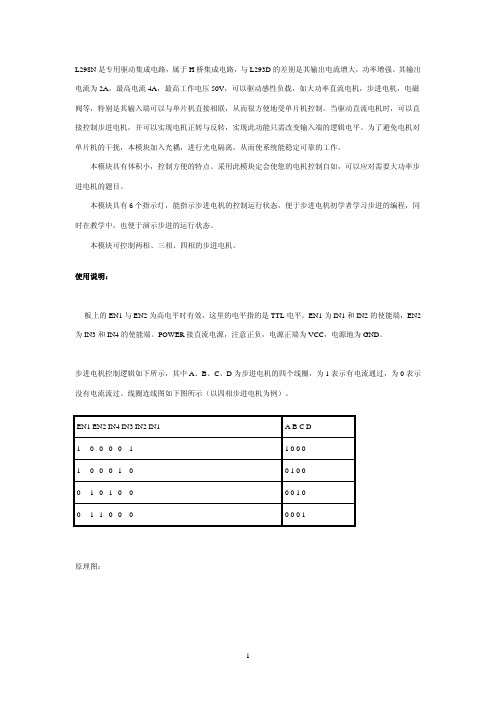
使用说明:板上的EN1与EN2为高电平时有效,这里的电平指的是TTL电平。
EN1为IN1和IN2的使能端,EN2为IN3和IN4的使能端。
POWER接直流电源,注意正负,电源正端为VCC,电源地为GND。
步进电机控制逻辑如下所示,其中A、B、C、D为步进电机的四个线圈,为1表示有电流通过,为0表示没有电流流过。
线圈连线图如下图所示(以四相步进电机为例)。
EN1 EN2 IN4 IN3 IN2 IN1 A B C D1 0 0 0 0 1 1 0 0 01 0 0 0 1 0 0 1 0 00 1 0 1 0 0 0 0 1 00 1 1 0 0 0 0 0 0 1原理图:L298Jenuary 2000DUAL FULL-BRIDGE DRIVERMultiwatt15ORDERING NUMBERS : L298N (Multiwatt Vert.)L298HN (Multiwatt Horiz.)L298P (PowerSO20)BLOCK DIAGRAM.OPERATING SUPPLY VOLTAGE UP TO 46 V .TOTAL DC CURRENT UP TO 4 A .LOW SATURATION VOLTAGE.OVERTEMPERATURE PROTECTION.LOGICAL "0" INPUT VOLTAGE UP TO 1.5 V (HIGH NOISE IMMUNITY)DESCRIPTIONThe L298 is an integrated monolithic circuit in a 15-lead Multiwatt and PowerSO20 packages. It is a high voltage, high current dual full-bridge driver de-signed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors. Two enable inputs are provided to enable or disable the device independently of the in-put signals. The emitters of the lower transistors of each bridge are connected together and the corre-sponding external terminal can be used for the con-nection of an external sensing resistor. An additional supply input is provided so that the logic works at a lower voltage.PowerSO20®1/13PIN CONNECTIONS (top view)GND Input 2VSS N.C.Out 1V SOut 2Input 1Enable A Sense AGND1089765432131415161719182012111GNDD95IN239Input 3Enable B Out 3Input 4Out 4N.C.Sense B GND ABSOLUTE MAXIMUM RATINGSSymbol ParameterValue Unit V S Power Supply 50V V SS Logic Supply Voltage7V V I ,V en Input and Enable Voltage–0.3 to 7V I OPeak Output Current (each Channel)– Non Repetitive (t = 100µs)–Repetitive (80% on –20% off; t on = 10ms)–DC Operation 32.52A A A V sens Sensing Voltage–1 to 2.3V P tot Total Power Dissipation (T case = 75°C)25W T op Junction Operating Temperature –25 to 130°C T stg , T jStorage and Junction Temperature–40 to 150°CTHERMAL DATASymbol ParameterPowerSO20Multiwatt15Unit R th j-case Thermal Resistance Junction-case Max.–3°C/W R th j-ambThermal Resistance Junction-ambient Max.13 (*)35°C/W(*) Mounted on aluminum substrate1234567910118ENABLE B INPUT 3LOGIC SUPPLY VOLTAGE V SS GND INPUT 2ENABLE A INPUT 1SUPPLY VOLTAGE V S OUTPUT 2OUTPUT 1CURRENT SENSING ATAB CONNECTED TO PIN 813141512CURRENT SENSING B OUTPUT 4OUTPUT 3INPUT 4D95IN240AMultiwatt15PowerSO20PIN FUNCTIONS (refer to the block diagram)MW.15PowerSO Name Function1;152;19Sense A; Sense B Between this pin and ground is connected the sense resistor tocontrol the current of the load.2;34;5Out 1; Out 2Outputs of the Bridge A; the current that flows through the loadconnected between these two pins is monitored at pin 1.46V S Supply Voltage for the Power Output Stages.A non-inductive 100nF capacitor must be connected between thispin and ground.5;77;9Input 1; Input 2TTL Compatible Inputs of the Bridge A.6;118;14Enable A; Enable B TTL Compatible Enable Input: the L state disables the bridge A(enable A) and/or the bridge B (enable B).81,10,11,20GND Ground.912VSS Supply Voltage for the Logic Blocks. A100nF capacitor must beconnected between this pin and ground.10; 1213;15Input 3; Input 4TTL Compatible Inputs of the Bridge B.13; 1416;17Out 3; Out 4Outputs of the Bridge B. The current that flows through the loadconnected between these two pins is monitored at pin 15.–3;18N.C.Not ConnectedELECTRICAL CHARACTERISTICS (V S = 42V; V SS = 5V, T j = 25°C; unless otherwise specified)Symbol Parameter Test Conditions Min.Typ.Max.Unit V S Supply Voltage (pin 4)Operative Condition V IH +2.546V V SS Logic Supply Voltage (pin 9) 4.557VI S Quiescent Supply Current (pin 4)V en = H; I L = 0 V i = LV i = H 13502270mAmAV en = L V i = X4mAI SS Quiescent Current from V SS (pin 9)V en = H; I L = 0 V i = LV i = H 2473612mAmAV en = L V i = X6mA V iL Input Low Voltage(pins 5, 7, 10, 12)–0.3 1.5VV iH Input High Voltage(pins 5, 7, 10, 12)2.3VSS VI iL Low Voltage Input Current(pins 5, 7, 10, 12)V i = L–10µAI iH High Voltage Input Current(pins 5, 7, 10, 12)Vi = H ≤ V SS –0.6V30100µA V en = L Enable Low Voltage (pins 6, 11)–0.3 1.5V V en = H Enable High Voltage (pins 6, 11) 2.3V SS V I en = L Low Voltage Enable Current(pins 6, 11)V en = L–10µAI en = H High Voltage Enable Current(pins 6, 11)V en = H ≤ V SS –0.6V30100µAV CEsat (H)Source Saturation Voltage I L = 1AI L = 2A 0.95 1.3521.72.7VVV CEsat (L)Sink Saturation Voltage I L = 1A (5)I L = 2A (5)0.85 1.21.71.62.3VVV CEsat Total Drop I L = 1A (5)I L = 2A (5)1.80 3.24.9VVV sens Sensing Voltage (pins 1, 15)–1 (1)2VFigure 1 : Typical Saturation Voltage vs. OutputCurrent.Figure 2 : Switching Times Test Circuits.Note :For INPUT Switching, set EN = HFor ENABLE Switching, set IN = H1) 1)Sensing voltage can be –1 V for t ≤ 50 µsec; in steady state V sens min ≥ – 0.5 V.2) See fig. 2.3) See fig. 4.4) The load must be a pure resistor.ELECTRICAL CHARACTERISTICS (continued)Symbol ParameterTest ConditionsMin.Typ.Max.Unit T 1 (V i )Source Current Turn-off Delay 0.5 V i to 0.9 I L (2); (4) 1.5µs T 2 (V i )Source Current Fall Time 0.9 I L to 0.1 I L (2); (4)0.2µs T 3 (V i )Source Current Turn-on Delay 0.5 V i to 0.1 I L (2); (4)2µs T 4 (V i )Source Current Rise Time 0.1 I L to 0.9 I L (2); (4)0.7µs T 5 (V i )Sink Current Turn-off Delay 0.5 V ito 0.9 I L (3); (4)0.7µs T 6 (V i )Sink Current Fall Time 0.9 I L to 0.1 I L (3); (4)0.25µs T 7 (V i )Sink Current Turn-on Delay 0.5 V i to 0.9 I L (3); (4) 1.6µs T 8 (V i )Sink Current Rise Time 0.1 I L to 0.9 I L (3); (4)0.2µs fc (V i )Commutation Frequency I L = 2A2540KHz T 1 (V en )Source Current Turn-off Delay 0.5 V en to 0.9 I L (2); (4)3µs T 2 (V en )Source Current Fall Time 0.9 I L to 0.1 I L (2); (4)1µs T 3 (V en )Source Current Turn-on Delay 0.5 V en to 0.1 I L (2); (4)0.3µs T 4 (V en )Source Current Rise Time 0.1 I L to 0.9 I L (2); (4)0.4µs T 5 (V en )Sink Current Turn-off Delay 0.5 V en to 0.9 I L (3); (4) 2.2µs T 6 (V en )Sink Current Fall Time 0.9 I L to 0.1 I L (3); (4)0.35µs T 7 (V en )Sink Current Turn-on Delay 0.5 V en to 0.9 I L (3); (4)0.25µs T 8 (V en )Sink Current Rise Time0.1 I L to 0.9 I L (3); (4)0.1µsFigure 3 : Source Current Delay Times vs. Input or Enable Switching.Figure 4 : Switching Times Test Circuits.Note :For INPUT Switching, set EN = HFor ENABLE Switching, set IN = LFigure 5 : Sink Current Delay Times vs. Input 0 V Enable Switching.Figure 6 :Bidirectional DC Motor Control.L = Low H = High X = Don’t careInputsFunction V en = HC = H ;D = L Forward C = L ; D = H Reverse C = DFast Motor Stop V en = LC = X ;D = XFree RunningMotor StopFigure 7 : For higher currents, outputs can be paralleled. Take care to parallel channel 1 with channel 4 and channel 2 with channel 3.APPLICATION INFORMATION (Refer to the block diagram)1.1. POWER OUTPUT STAGEThe L298 integrates two power output stages (A ; B). The power output stage is a bridge configuration and its outputs can drive an inductive load in com-mon or differenzial mode, depending on the state of the inputs. The current that flows through the load comes out from the bridge at the sense output : an external resistor (R SA ; R SB.) allows to detect the in-tensity of this current.1.2. INPUT STAGEEach bridge is driven by means of four gates the in-put of which are In1 ; In2 ; EnA and In3 ; In4 ; EnB. The In inputs set the bridge state when The En input is high ; a low state of the En input inhibits the bridge. All the inputs are TTL compatible.2. SUGGESTIONSA non inductive capacitor, usually of 100 nF, must be foreseen between both Vs and Vss, to ground, as near as possible to GND pin. When the large ca-pacitor of the power supply is too far from the IC, a second smaller one must be foreseen near the L298.The sense resistor, not of a wire wound type, must be grounded near the negative pole of Vs that must be near the GND pin of the I.C.Each input must be connected to the source of the driving signals by means of a very short path. Turn-On and Turn-Off : Before to Turn-ON the Sup-ply Voltage and before to Turn it OFF, the Enable in-put must be driven to the Low state.3. APPLICATIONSFig 6 shows a bidirectional DC motor control Sche-matic Diagram for which only one bridge is needed. The external bridge of diodes D1 to D4 is made by four fast recovery elements (trr≤ 200 nsec) that must be chosen of a VF as low as possible at the worst case of the load current.The sense output voltage can be used to control the current amplitude by chopping the inputs, or to pro-vide overcurrent protection by switching low the en-able input.The brake function (Fast motor stop) requires that the Absolute Maximum Rating of 2 Amps must never be overcome.When the repetitive peak current needed from the load is higher than 2 Amps, a paralleled configura-tion can be chosen (See Fig.7).An external bridge of diodes are required when in-ductive loads are driven and when the inputs of theIC are chopped ; Shottky diodes would be preferred.This solution can drive until 3 Amps In DC operation and until 3.5 Amps of a repetitive peak current.On Fig 8 it is shown the driving of a two phase bipolar stepper motor ; the needed signals to drive the in-puts of the L298 are generated, in this example, from the IC L297.Fig 9 shows an example of P.C.B. designed for the application of Fig 8.Fig 10 shows a second two phase bipolar stepper motor control circuit where the current is controlled by the I.C. L6506.Figure 8 : Two Phase Bipolar Stepper Motor Circuit.This circuit drives bipolar stepper motors with winding currents up to 2 A. The diodes are fast 2 A types.R S1 = R S2 = 0.5 ΩD1 to D8 = 2 A Fast diodes{V F≤ 1.2 V @ I = 2 Atrr ≤200 nsFigure 9 : Suggested Printed Circuit Board Layout for the Circuit of fig. 8 (1:1 scale).Figure 10 : Two Phase Bipolar Stepper Motor Control Circuit by Using the Current Controller L6506.R R and R sense depend from the load currentMultiwatt15 VDIM.mminch MIN.TYP.MAX.MIN.TYP.MAX.A 50.197B 2.650.104C 1.60.063D 10.039E 0.490.550.0190.022F 0.660.750.0260.030G 1.02 1.27 1.520.0400.0500.060G117.5317.7818.030.6900.7000.710H119.60.772H220.20.795L 21.922.222.50.8620.8740.886L121.722.122.50.8540.8700.886L217.6518.10.6950.713L317.2517.517.750.6790.6890.699L410.310.710.90.4060.4210.429L7 2.65 2.90.1040.114M 4.25 4.55 4.850.1670.1790.191M1 4.63 5.08 5.530.1820.2000.218S 1.9 2.60.0750.102S1 1.9 2.60.0750.102Dia13.653.850.1440.152OUTLINE ANDMECHANICAL DATADIM.mminch MIN.TYP.MAX.MIN.TYP.MAX.A 50.197B 2.650.104C 1.60.063E 0.490.550.0190.022F 0.660.750.0260.030G 1.14 1.27 1.40.0450.0500.055G117.5717.7817.910.6920.7000.705H119.60.772H220.20.795L 20.570.810L118.030.710L2 2.540.100L317.2517.517.750.6790.6890.699L410.310.710.90.4060.4210.429L5 5.280.208L6 2.380.094L7 2.65 2.90.1040.114S 1.9 2.60.0750.102S1 1.9 2.60.0750.102Dia13.653.850.1440.152Multiwatt15 HOUTLINE ANDMECHANICAL DATAJEDEC MO-166PowerSO20ea2AEa1PSO20MECDETAIL ATD11120E1E2h x 45DETAIL Aleadsluga3SGage Plane0.35LDETAIL BRDETAIL B(COPLANARITY)GC- C -SEATING PLANEe3bcNN HBOTTOM VIEWE3D1DIM.mm inch MIN.TYP.MAX.MIN.TYP.MAX.A 3.60.142a10.10.30.0040.012a2 3.30.130a300.10.0000.004b 0.40.530.0160.021c 0.230.320.0090.013D (1)15.8160.6220.630D19.49.80.3700.386E 13.914.50.5470.570e 1.270.050e311.430.450E1 (1)10.911.10.4290.437E2 2.90.114E3 5.8 6.20.2280.244G 00.10.0000.004H 15.515.90.6100.626h 1.10.043L 0.81.10.0310.043N 10˚ (max.)S T100.394(1) "D and F" do not include mold flash or protrusions.- Mold flash or protrusions shall not exceed 0.15 mm (0.006").- Critical dimensions: "E", "G" and "a3"OUTLINE AND MECHANICAL DATA8˚ (max.)10Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the conse-quences of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No license is granted by implication or otherwise under any patent or patent rights of STMicroelectronics. Specification mentioned in this publication are subject to change without notice. This publication supersedes and replaces all information previously supplied. STMi-croelectronics products are not authorized for use as critical components in life support devices or systems without express written approval of STMicroelectronics.The ST logo is a registered trademark of STMicroelectronics© 2000 STMicroelectronics – Printed in Italy – All Rights ReservedSTMicroelectronics GROUP OF COMPANIESAustralia - Brazil - China - Finland - France - Germany - Hong Kong - India - Italy - Japan - Malaysia - Malta - Morocco -Singapore - Spain - Sweden - Switzerland - United Kingdom - U.S.A.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L297-L298中文资料介绍
L298简介:
L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相
和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准
TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且
可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,
但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。
L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路;OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图
图10 L298 内部逻辑图
L298 ABSOLUTE MAXIMUM RATINGS 绝对最大额定值:
Symbol符
号
Parameter 参数Value数值单位VS Power Supply 电源50 V
VSS
Logic Supply Voltage 电源
电压
7 V
VI,Ven
Input and Enable Voltage
输入电压和启用
–0.3 to 7 V
IO 峰值输出电流(每通道)
A 非重复性(t= 100ms) 3
重复(80% on –20% off; ton
= 10ms)
2.5
L298 PIN FUNCTIONS (refer to the block diagram) 引脚功能(请参阅框图):
L298 ELECTRICAL CHARACTERISTICS(VS=42V;VSS=5V,Tj=25℃; unless otherwise specified)电气特性:
图11 L298 外形图
L297/L298组合应用实例:
297加驱动器组成的步进电机控制电路具有以下优点:使用元件少,组件的损耗低,可靠性高体积小,软件开发简单,并且计算机(或单片机)硬件费用大大减少。
L297与L298配合使用控制双极步进电机工作电流可达2.5A;如与L293E配套使用,步进电机绕组电流。
图12为L297和L298组成的控制驱动器的线路图。
L297的特性是只需要时钟、方向和模式输入信号。
相位是由内部产生的,因此可减轻计算机(或单片机)和程序设计的负担。
L298芯片是一种高压、大电流双H桥式驱动器。
L297和L298组合控制驱动的步进电机可用于如打印机的托架位置、记录仪的进给机构,以及打字机、数控机床、软盘驱动器、机器人、绘图机、复印机、阀门等设备和装置。
L297的工作原理介绍
L297是意大利SGS半导体公司生产的步进电机专用控制器,它能产生4相控制信号,可用于计算机控制的两相双极和四相单相步进电机,能够用单四拍、双四拍、四相八拍方式控制步进电机。
芯片内的PWM斩波器电路可开关模式下调节步进电机绕组中的电机绕组中
的电流。
该集成电路采用了SGS公司的模拟/数字兼容的I2L技术,使用5V的电源电压,全部信号的连接都与TFL/CMOS或集电极开路的晶体管兼容。
L297的芯片引脚特别紧凑,采用双列直插20脚塑封封装,其引脚见图1,内部方框见图2。
在图2所示的L297的内部方框图中。
变换器是一个重要组成部分。
变换器由一个三倍计算器加某些组合逻辑电路组成,产生一个基本的八格雷码(顺序如图3所示)。
由变换器产生4个输出信号送给后面的输出逻辑部分,输出逻辑提供禁止和斩波器功能所需的相序。
为了获得电动机良好的速度和转矩特性,相序信号是通过2个PWM斩波器控制电动波器包含有一个比较器、一个触发器和一个外部检测电阻,如图4所示,晶片内部的通用振荡器提供斩波频率脉冲。
每个斩波器的触发器由振荡器的脉冲调节,当负载电流提高时检测电阻上的电压相对提高,当电压达到Uref时(Uref是根据峰值负载电流而定的),将触发器重置,切断输出,直至第二个振荡脉冲到来、此线路的输出(即触发器Q输出)是一恒定速率的PWM信号,L297的CONTROL端的输入决定斩波器对相位线A,B,C,D或抑制线INH1和INH2起作用。
CONTROL为高电平时,对A,B,C,D有抑制作用;为低电平时,则对抑制线INH1和INH2有抑制作用,从而可对电动机和转矩进行控制。
图1 L297引脚图
图2 L297内部方框电路图
图3 L297变换器换出的八步雷格码(顺时针旋转)图4 斩波器线路
图5 多个L297同步工作连接图
L297 ABSOLUTE MAXIMUM RATINGS绝对最大额定值:
L297 ELECTRICAL CHARACTERISTICS (Refer to the block diagram Tamb = 25℃, Vs = 5V unless otherwise
specified) L297 电气特性:
L297各引脚功能说明
1脚(SYNG)——斩波器输出端。
如多个297同步控制,所有的SYNC端都要连在一起,共用一套振荡元件。
如果使用外部时钟源,则时钟信号接到此引脚上。
2脚(GND)——接地端。
3脚(HOME)——集电极开路输出端。
当L297在初始状态(ABCD=0101)时,此端有指示。
当此引脚有效时,晶体管开路。
4脚(A)——A相驱动信号。
5脚(INH1)——控制A相和B相的驱动极。
当此引脚为低电平时,A相、B相驱动控制被禁止;当线圈级断电时,双极性桥用这个信号使负载电源快速衰减。
若CONTROL端输入是低电平时,用斩波器调节负载电流。
6脚(B)——B相驱动信号。
7脚(C)——C相驱动信号。
8脚(INH2)——控制C相和D相的驱动级。
作用同INH1相同。
9脚(D)——D相驱动信号。
10脚(ENABLE)——L297的使能输入端。
当它为低电平时,INH1,INH2,A,B,C,D都为低电平。
当系统被复位时用来阻止电机驱动。
11脚(CONTROL)——斩波器功能控制端。
低电平时使INH1和INH2起作用,高电平时使A,B,C,D起作用。
12脚(Vcc)——+5V电源输入端。
13脚(SENS2)——C相、D相绕组电流检测电压反馈输入端。
14脚(SENS1)——A相、B相绕组电流检测电压反馈输入端。
15脚(Vref )——斩波器基准电压输入端。
加到此引脚的电压决定绕组电流的峰值。
16脚(OSC)——斩波器频率输入端。
一个RC网络接至此引角以决定斩波器频率,在多个L297同步工作时其中一个接到RC网络,其余的此引角接地,各个器件的脚I (SYNC)
应连接到一起这样可杂波的引入问题如图5所示。
17脚(CW/CCW)—方向控制端。
步进电机实际旋转方向由绕组的连接方法决定。
当改变此引脚的电平状态时,步进电机反向旋转。
18脚(CLOCK)——步进时钟输入端。
该引脚输入负脉冲时步进电机向前步进一个增量,该步进是在信号的上升沿产生。
19脚(HALF/FULL)——半步、全步方式选择端。
此引脚输入高电平时为半步方式(四相八拍),低电平时为全步方式。
如选择全步方式时变换器在奇数状态,会得到单相工作方式(单四拍)。
20脚(RESET)——复位输入端。
此引脚输入负脉冲时,变换器恢复初始状态(ABCD=0101)。
L297驱动相序的产生
L297能产生单四拍、双四拍和四相八拍工作所需的适当相序。
3种方式的驱动相序都可以很容易地根据变换器输出的格雷码的顺序产生,格雷码的顺序直接与四八拍(半步方式)相符合,只要在脚19输入一高电平即可得到。
其波形图如图6所示。
图6 四相八拍模式波形图
通过交替跳过在八步顺序中的状态就可以得到全步工作方式,此时需在脚19接一低电平,前已述及根据变换器的状态可得到四拍或双四拍2种工作模式,如图7,8所示。
图7 单四拍模式波形图图8 双四拍模式波形图。