吨秤电气图
称重传感器接线图

称重传感器接线图目录百科名片称重传感器由组合式S型梁结构及金属箔式应变计构成,具有过载保护装置。
测量精度高、温度特性好、工作稳定等优点。
广泛用于各种结构的动、静态测量及各种电子称的一次仪表。
工作原理被称重物或者载重汽车置于秤台上,在重力效用下,秤台将重力通报至扭捏支承,使称重传感器弹性体孕育发生形变,贴附于弹性体应变梁上的应变计桥路掉去均衡,输出与重量数据成比例的电旌旗灯号,经度性放大器将旌旗灯号放大。
再经A/D转换为数码旌旗灯号,由仪表的微措置惩罚机(CPU)对重量旌旗灯号举行措置惩罚后直接预示重量数据。
设置打印机后,便可打印记载称重数据,要是设置计较机可将计量数据输入计较机办理体系举行综合办理。
编辑本段称重传感器接线图称重传感器可以采用两种不同的输入、输出接线方法:一种是四线制接法,另一种是六线制接法(如图1所示).四线制接法的称重传感器对二次仪表无特殊要求,使用起来比较方便,但当电缆线较长时,容易受环境温度波动等因素的影响;六线制接法的称重传感器要求与之配套使用的二次仪表具备反馈输入接口,使用范围有一定的局限性,但不容易受环境温度波动等因素的影响,在精密测量及长距离测量时具有一定的优势在称重设备中,四线的传感器用的比较多,如果要将六线传感器接到四线传感器的设备上时,可以把反馈正(黄)和激励正(绿)接到一起,反馈负(蓝)和激励负(黑),接到一起。
信号线要注意一点就是,红色和白色在两种类型的传感器上对应的输出信号是不一样的。
称重传感器的接线手法目前我国有不少称重传感器制造企业同时生产两种不同制式的称重传感器,只是通过简单地换用四芯或六芯线来生产四线制或六线制称重传感器,也未在用户使用说明书中说明六线制接法的称重传感器使用限制或错误使用可能带来的测量误差;称重传感器可以采用两种不同的输入、输出接线方法,一种是四线制接法,另一种是六线制接法.四线制接法的称重传感器对二次仪表无特殊要求,使用起来比较方便,但当电缆线较长时,容易受环境温度波动等因素带来的干扰影响,从而影响电子衡器的计量性能;六线制接法的称重传感器要求与之配套使用的二次仪表具备反馈输入接口,使用范围有一定的局限性,但不容易受环境温度波动等因素带来的影响,在精密测量及长距离测量时具有一定的优势。
BST100-E11[E01-E21-C21][定量皮带给料机]称重控制器操作手册[V3.6]-B5
![BST100-E11[E01-E21-C21][定量皮带给料机]称重控制器操作手册[V3.6]-B5](https://img.taocdn.com/s3/m/73a5c60052ea551810a687cf.png)
设备控制器_计量柜二次接线图纸

推荐-MSP430F149电子秤设计附电路图1 精品
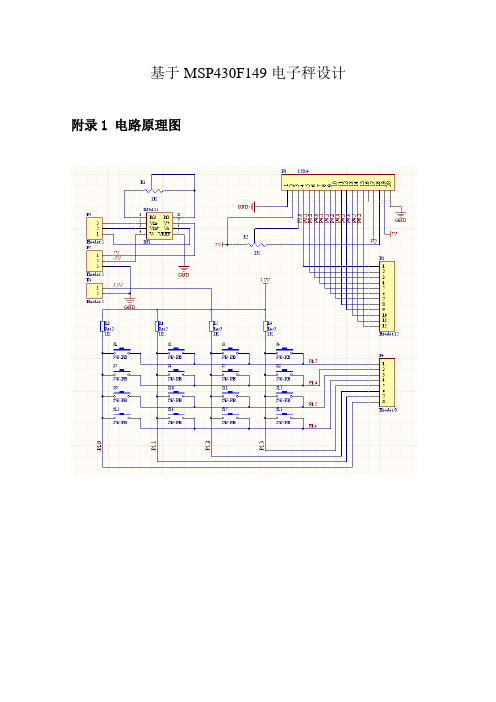
基于MSP430F149电子秤设计附录1 电路原理图附录2 程序/***********************************************************程序功能:在12864液晶上显示重量---------------------------------------------------------------------------------------------------------------测试说明:观察液晶显示***********************************************************/#include <msp430x14x.h>typedef unsigned char uchar;typedef unsigned int uint;extern const unsigned char shuzi_table[];float e;/***************全局变量***************/uchar key_Pressed; //按键是否被按下:1--是,0--否uchar key_val; //存放键值uchar key_Flag; //按键是否已放开:1--是,0--否/*设置键盘逻辑键值与程序计算键值的映射*/uchar key_Map[] = {0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15};#define LCD_DataIn P4DIR=0x00 //数据口方向设置为输入#define LCD_DataOut P4DIR=0xff //数据口方向设置为输出#define LCD2MCU_Data P4IN#define MCU2LCD_Data P4OUT#define LCD_CMDOut P3DIR|=0x07 //P3口的低三位设置为输出#define LCD_RS_H P3OUT|=BIT0 //P3.0#define LCD_RS_L P3OUT&=~BIT0 //P3.0#define LCD_RW_H P3OUT|=BIT1 //P3.1#define LCD_RW_L P3OUT&=~BIT1 //P3.1#define LCD_EN_H P3OUT|=BIT2 //P3.2#define LCD_EN_L P3OUT&=~BIT2 //P3.2/*******************************************写入内容待显示内容********************************************/const uchar hang1[] = {"小小苏电子称系统"};const uchar hang2[] = {"净重: g "};const uchar hang3[] = {"总价: 元"};const uchar hang4[] = {"单价/Kg"};const uchar hang5[] = {"萝卜"};const uchar hang6[] = {"豆角"};const uchar hang7[] = {"土豆"};const uchar hang8[] = {"白菜"};const uchar hang9[] = {"苹果"};const uchar hang10[] = {"香蕉"};const uchar hang11[] = {"橘子"};const uchar hang12[] = {"桃子"};const uchar hang13[] = {"猪肉"};const uchar hang14[] = {"羊肉"};const uchar hang15[] = {"牛肉"};const uchar hang16[] = {"鸡肉"};const uchar hang17[] = {"山药"};const uchar hang18[] = {"生姜"};const uchar hang19[] = {"木耳"};/*******************************************函数名称:Init_Keypad功能:初始化扫描键盘的IO端口参数:无返回值:无********************************************/void Init_Keypad(void){P1DIR = 0xf0; //P1.0~P1.3设置为输入状态, P1.4~P1.7设置为输出状态P1OUT |= 0xf0; // P1.4~P1.7输出低电平key_Flag = 0;key_Pressed = 0;key_val = 5;}/*******************************************函数名称:Check_Key功能:扫描键盘的IO端口,获得键值参数:无返回值:无********************************************/void Check_Key(void){uchar row ,col,tmp1,tmp2;tmp1 = 0x80;for(row = 0;row < 4;row++) //行扫描{P1OUT = 0xf0; //P1.4~P1.7输出全0P1OUT -= tmp1; //P1.4~p1.7输出四位中有一个为0tmp1 >>=1;if ((P1IN & 0x0f) < 0x0f) //是否P1IN的P1.0~P1.3中有一位为0{ tmp2 = 0x01; // tmp2用于检测出那一位为0for(col = 0;col < 4;col++) // 列检测{ if((P1IN & tmp2) == 0x00) // 是否是该列,等于0为是{ key_val = key_Map[row * 4 + col]; // 获取键值return; // 退出循环}tmp2 <<= 1; // tmp2右移1位}}}//return (key_val);}/*******************************************函数名称:delay功能:延时约15ms,完成消抖功能参数:无返回值:无********************************************/void delay(){uint tmp;for(tmp = 12000;tmp > 0;tmp--);}/*******************************************函数名称:Key_Event功能:检测按键,并获取键值参数:无返回值:无********************************************/void Key_Event(void){uchar tmp;P1OUT &= 0x00; // 设置P1高四位全为0,等待按键输入tmp = P1IN; // 获取p1INif ((key_Pressed == 0x00)&&((tmp & 0x0f) < 0x0f)) //如果有键按下{key_Pressed = 1; // 如果有按键按下,设置key_Pressed标识delay(); //消除抖动Check_Key(); // 调用check_Key(),获取键值}else if((key_Pressed == 1)&&((tmp & 0x0f) == 0x0f)) //如果按键已经释放{key_Pressed = 0; // 清除key_Pressed标识key_Flag = 1; // 设置key_Flag标识}else{_NOP();}}/*******************************************函数名称:Delay_1ms功能:延时约1ms的时间参数:无返回值:无********************************************/void Delay_1ms(void){uchar i;for(i = 150;i > 0;i--) _NOP();}/******************************************* 函数名称:Delay_Nms功能:延时N个1ms的时间参数:n--延时长度返回值:无********************************************/ void Delay_Nms(uint n){uint i;for(i = n;i > 0;i--) Delay_1ms();}/******************************************* 函数名称:Write_Cmd功能:向液晶中写控制命令参数:cmd--控制命令返回值:无********************************************/ void Write_Cmd(uchar cmd){uchar lcdtemp = 0;LCD_RS_L;LCD_RW_H;LCD_DataIn;do //判忙{ LCD_EN_H;_NOP();lcdtemp = LCD2MCU_Data;LCD_EN_L;}while(lcdtemp & 0x80);LCD_DataOut;LCD_RW_L;MCU2LCD_Data = cmd;LCD_EN_H;_NOP();LCD_EN_L;}/******************************************* 函数名称:Write_Data功能:向液晶中写显示数据参数:dat--显示数据返回值:无********************************************/ void Write_Data(uchar dat){uchar lcdtemp = 0;LCD_RS_L;LCD_RW_H;LCD_DataIn;do //判忙{LCD_EN_H;_NOP();lcdtemp = LCD2MCU_Data;LCD_EN_L;}while(lcdtemp & 0x80);LCD_DataOut;LCD_RS_H;LCD_RW_L;MCU2LCD_Data = dat;LCD_EN_H;_NOP();LCD_EN_L;}/******************************************* 函数名称:Ini_Lcd功能:初始化液晶模块参数:无返回值:无********************************************/ void Ini_Lcd(void){LCD_CMDOut; //液晶控制端口设置为输出Delay_Nms(500);Write_Cmd(0x30); //基本指令集Delay_1ms();Write_Cmd(0x02); // 地址归位Delay_1ms();Write_Cmd(0x0c); //整体显示打开,游标关闭Delay_1ms();Write_Cmd(0x01); //清除显示Delay_1ms();Write_Cmd(0x06); //游标右移Delay_1ms();Write_Cmd(0x80); //设定显示的起始地址}/******************************************* 函数名称:Disp_HZ功能:控制液晶显示汉字参数:addr--显示位置的首地址pt--指向显示数据的指针num--显示字符个数返回值:无********************************************/ void Disp_HZ(uchar addr,const uchar * pt,uchar num) {uchar i;Write_Cmd(addr);for(i = 0;i < num;i++)Write_Data(*(pt++));}/******************************************* 函数名称:Disp_WEI功能:控制液晶显示汉字参数:addr--显示位置的首地址pt--指向显示数据的指针num--显示字符个数返回值:无********************************************/ void Disp_WEI(uchar addr,int c,char num){uchar i;Write_Cmd(addr);for(i = 0;i < num;i++)Write_Data(c);}/***************************主函数*************************/void main( void ){ /*下面六行程序关闭所有的IO口*/P1DIR = 0XFF;P1OUT = 0XFF;P2DIR = 0XFF;P2OUT = 0XFF;P3DIR = 0XFF;P3OUT = 0XFF;P4DIR = 0XFF;P4OUT = 0XFF;P5DIR = 0XFF;P5OUT = 0XFF;P6DIR = 0XFF;P6OUT = 0XFF;WDTCTL = WDTPW + WDTHOLD; //关狗P6DIR |= BIT2;P6OUT |= BIT2; //关闭电平转换Ini_Lcd(); //初始化液晶ADC12CTL0=SHT0_2+ADC12ON; //设置采样时间+ADC12内核开ADC12CTL1=SHP; //使用采样定时器ADC12IE=0X01; //开启中断ADC12CTL0 |=ENC; //转换使能P6SEL |=0X01;Disp_HZ(0x80,hang1,16);Disp_HZ(0x90,hang2,16);Disp_HZ(0x88,hang3,16);Disp_HZ(0x98,hang4,16);Init_Keypad();_EINT();while(1){ADC12CTL0 |=ADC12SC; //启动转换//while ((ADC12IFG & 0x01)==0);_NOP();Key_Event();if(key_Flag==1){key_Flag=0;switch(key_val){case 0:P2OUT=0XFE;Disp_HZ(0x9a,hang5,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(2+0x30);Write_Data(0x2e);Write_Data(3+0x30);e=2.3; break;case 1:P2OUT=0XFD;Disp_HZ(0x9a,hang6,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(6+0x30);Write_Data(0x2e);Write_Data(9+0x30);e=6.9;break;case 2:P2OUT=0XFB;Disp_HZ(0x9a,hang7,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(2+0x30);Write_Data(0x2e);Write_Data(0+0x30);e=2.0;break;case 3:P2OUT=0XF7;Disp_HZ(0x9a,hang8,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(1+0x30);Write_Data(0x2e);Write_Data(5+0x30);e=1.5;break;case 4:P2OUT=0XEF;Disp_HZ(0x9a,hang9,4);Write_Cmd(0x9c);Write_Data(1+0x30);Write_Data(4+0x30);Write_Data(0x2e);Write_Data(0+0x30);e=14.0;break;case 5:P2OUT=0XDF;Disp_HZ(0x9a,hang10,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(9+0x30);Write_Data(0x2e);Write_Data(0+0x30);e=9.0;break;case 6:P2OUT=0XBF;Disp_HZ(0x9a,hang11,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(6+0x30); Write_Data(0x2e);Write_Data(0+0x30);e=6.0;break;case 7:P2OUT=0X7F;Disp_HZ(0x9a,hang12,4);Write_Cmd(0x9c);Write_Data(2+0x30);Write_Data(0+0x30); Write_Data(0x2e);Write_Data(0+0x30);e=20.0;break;case 8:P2OUT =~0XFE;Disp_HZ(0x9a,hang13,4);Write_Cmd(0x9c);Write_Data(3+0x30);Write_Data(5+0x30); Write_Data(0x2e);Write_Data(0+0x30);e=30.0;break;case 9:P2OUT =~0XFD;Disp_HZ(0x9a,hang14,4);Write_Cmd(0x9c);Write_Data(8+0x30);Write_Data(0+0x30); Write_Data(0x2e);Write_Data(0+0x30);e=80.0;break;case 10:P2OUT =~0XFB;Disp_HZ(0x9a,hang15,4);Write_Cmd(0x9c);Write_Data(7+0x30);Write_Data(0+0x30); Write_Data(0x2e);Write_Data(0+0x30);e=70.0;break;case 11:P2OUT =~0XF7;Disp_HZ(0x9a,hang16,4);Write_Cmd(0x9c);Write_Data(1+0x30);Write_Data(5+0x30); Write_Data(0x2e);Write_Data(0+0x30);e=15.0;break;case 12:P2OUT =~0XEF;Disp_HZ(0x9a,hang17,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(3+0x30); Write_Data(0x2e);Write_Data(5+0x30);e=3.5;break;case 13:P2OUT =~0XDF;Disp_HZ(0x9a,hang18,4);Write_Cmd(0x9c);Write_Data(0+0x30);Write_Data(4+0x30);Write_Data(0x2e);Write_Data(5+0x30);e=4.5;break;case 14:P2OUT =~0XBF;Disp_HZ(0x9a,hang19,4);Write_Cmd(0x9c);Write_Data(4+0x30);Write_Data(0+0x30);Write_Data(0x2e);Write_Data(5+0x30);e=40.0;break;case 15:P2OUT =~0X7F;//Disp_HZ(0x9a,hang21,4);Write_Cmd(0x9a);Write_Data(0x20);Write_Data(0x20);Write_Data(0x20);Write_Data(0x20);Write_Data(0+0x30);Write_Data(0+0x30);Write_Data(0x2e);Write_Data(0+0x30);e=0;break;default:break ;}}}}#pragma vector=ADC_VECTOR__interrupt void ADC12_ISR(void){ int a,b,c,d,temp;long int g,y;temp=ADC12MEM0;temp=temp/100;g=121*temp;y=g*e;if(g>400){a=g/1000;b=g%1000/100;c=g%1000%100/10;d=g%1000%100%10;}else{a=b=c=d=0;y=0;}Write_Cmd(0x93);Write_Data(a+0x30);Write_Data(b+0x30);Write_Data(c+0x30);Write_Data(d+0x30);Delay_Nms(200);Write_Cmd(0x8b);Write_Data(y/100000+0x30);Write_Data(y%100000/10000+0x30);Write_Data(y%100000%10000/1000+0x30);Write_Data(0x2e);Write_Data(y%100000%10000%1000/100+0x30);Write_Data(y%100000%10000%1000%100/10+0x30);_BIC_SR_IRQ(CPUOFF);}。
最新:简易电子秤设计说明书(内含电路图)
目录第一章设计任务 (2)1.1简述电子称国内外发展现状和发展趋势1.2电子称的优势第二章总体设计与方案选定 (4)2.1理论基础2.2基本原理第三章电路调试与实验 (5)3.1设计方案3.2方案介绍及选定3.2.1方案介绍3.2.2方案选定3.3系统各部分的设计3.3.1传感器的设计3.3.2传感器的选择3.3.3测试电路设计3.3.4主要芯片介绍3.3.5方案分析3.4调试方法和实验分析3.4.1调试方法3.4.2实验结果误差分析3.4.3设计中产生错误的分析第四章设计总结体会 (16)4.1设计总计体会附录 (17)附录1 电路附录2 PCB图第一章设计任务1.1简述电子称国内外发展现状和发展趋势国内发展50年代中期电子技术的渗入推动了衡器制造业的发展。
60年代初期出现机电结合式电子衡器以来,经过40多年的不断改进与完善,我国电子衡器从最初的机电结合型发展到现在的全电子型和数字智能型。
电子衡器制造技术及应用得到了新发展。
电子称重技术从静态称重向动态称重发展:计量方法从模拟测量向数字测量发展;测量特点从单参数测量向多参数测量发展,特别是对快速称重和动态称重的研究与应用。
电子称重技术基本达到国际上20世纪90年代中期的水平,少数产品的技术已处于国际领先水平。
国内的电子秤市场中,1009左右量程的电子秤精度一般为0.019即10mg。
在研究方法上,电子称重系统的工作原理一般是将作用在承载器上的质量或力的大小,通过压力传感器转换为电信号,并通过控制电路来处理该电信号。
但就总体而言,我国电子衡器产品的数量和质量与工业发达国家相比还有较大差距,其主要差距是技术与工艺不够先进、工艺装备与测试仪表老化、开发能力不足、产品的品种规格较少、功能不全、稳定性和可靠性较差等。
国外发展在国际上,一些发达国家在电子称重力一面已经达到了较高的水平。
特别是在准确度和可靠性等方面有了很大的提高。
在称重传感器方面,国外电子秤产品的品种和结构又有创新,技术功能和应用范围不断扩大,1)美国Revere公司研制出PUS型具有大气压力补偿功能的拉压两用的称重传感器,用于高准确度检验平台,称重平台,准确度可达5000d。
电子称重传感器及信号调理电路
电子称重传感器及信号调理电路燕山大学课程设计说明书题目:精密四应变片称重传感器信号调理电路设计学院(系):电气工程学院年级专业: XX学号: XX学生姓名: XX指导教师: XX教师职称: XX燕山大学课程设计(论文)任务书院(系):基层教学单位:说明:此表一式四份,学生、指导教师、基层教学单位、系部各一份。
月日燕山大学课程设计评审意见表目录第1章摘要 (1)第2章引言 (2)第3章基本原理 (3)第4章参数设计及运算 (5)4.1 结构设计 (5)4.2 电容设计与计算 (8)4.3 其他参数的计算 (10)4.4 测量电路的设计 (12)第5章误差分析 (14)第6章结论 (16)心得体会……………………………………………… (17)参考文献 (18)第1章摘要在分析重力传感器信号特性的基础上,模块化地设计了称重传感器信号的调理电路并对其进行了仿真实验。
结果表明:电路能实时、准确地处理信号,且工作稳定,可靠,重复性好,抗干扰能力强,可实现精密测量的目的。
第2章引言随着现代数据采集系统的不断发展,对高精度信号调理技术的要求也越来越高。
由于传感器输出的信号往往存在温漂、信号比较小及非线性等问题,因此它的信号通常不能被控制元件直接接收,这样一来,信号调理电路就成为数据采集系统中不可缺少的一部分,并且其电路设计的优化程度直接关系到数据采集系统的精度和稳定性。
在称重传感器信号检测中,检测精度受到诸多因素的影响,其中电桥激励电压源的精度和稳定度是影响信号精确度的重要因素之一。
电桥输出与激励电压成正比,因此,激励电压出现任何漂移都将导致电桥输出出现相应的漂移。
并且现场工作环境恶劣,可能存在粉尘、振动、噪声以及电磁干扰等,称重传感器输出的几百微伏至几十毫伏信号极易受到干扰。
所以研究抗干扰能力强、实时性好的信号变送和传输技术对保证检测精度具有重要意义。
第3章电路结构设计3.1 信号处理电路的要求分析测量电阻有两种简单的方法:一种是在电阻上通过恒定电流,并测量电阻两端的电压,这需要精密电流源和精密电压表。
电子秤实验室电路(中文)

本电路为采用AD7191构建的电子秤系统。
AD7191是一款引脚可编程、低噪声、低漂移24位Σ-Δ转换器,内置PGA,采用内部时钟。
该器件将大多数系统构建模块置于芯片内,因此能够简化电子秤设计。
它具有四种输出数据速率和四种增益设置,可利用专用引脚进行选择,这有助于简化与ADC的接口。
图1. 采用AD7191的电子秤系统(原理示意图,未显示所有连接)电路描述AD7191提供一种集成式电子秤解决方案,可以直接与称重传感器接口。
只需在模拟输入端用一些滤波器,在基准电压引脚上配置一些电容等外部元件,便可满足电磁屏蔽(EMC)要求。
来自称重传感器的低电平信号由AD7191的内置PGA放大。
该PGA经过编程,以128的增益工作。
AD7191的转换结果送至微控制器,将数字信息转换为重量并显示在LCD上。
图2所示为实际的测试设置。
为实现最佳系统性能,该测试设置使用一个6线式称重传感器。
除激励、接地和2个输出连接外,6线式称重传感器还有2个检测引脚。
这些检测引脚分别与惠斯登电桥的高端和低端相连,因此可以精确测量电桥上产生的电压。
此外,AD7191具有差分模拟输入,接受差分基准电压。
称重传感器差分SENSE线路与AD7191基准电压输入端相连,可构成一个比率式配置,不受电源激励电压的低频变化影响。
如果采用4线式称重传感器,则不存在检测引脚,ADC基准电压引脚将与激励电压和地相连。
这种配置中,由于存在线路电阻,激励电压与SENSE+之间将有压降,因此系统不是完全比率式。
另外,低端上也会有线路电阻引起的压降。
图2. 采用AD7191的电子秤系统AD7191具有单独的模拟电源和数字电源。
模拟部分必须采用5 V电源供电。
数字电源独立于模拟电源,可以为2.7 V至5.25 V范围内的任意电压。
微控制器采用3.3 V电源。
因此,DVDD也采用3.3 V电源供电。
这样就无需外部电平转换,从而可以简化ADC与微控制器之间的接口。
有多种方法可以为该电子秤系统供电,例如:利用主电源或利用电池(如图1所示)供电。
最新:简易电子秤设计说明书(内含电路图)

最新:简易电子秤设计说明书(内含电路图)案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
便携式称重仪面板和外部电路连接
便携式称重仪面板和外部电路连接1.通信接口(选配)与计算机的通信接口为一个五芯航空插座,引脚分配如下:1:GND 2:GND 3:TXD 4:RXD 5:空2.传感器连接本仪表配置了 2 个与传感器连接的四芯航空插座,内部并联因而秤台可以插入任意一个插座。
引脚分配如下:1:供桥(-) 2:供桥(+) 3:信号(-) 4:信号(+)3.直流电源和充电接口功能特点:¨240x128点阵式LCD液晶显示,界面清晰,带背光¨中文菜单提示,用户操作方便¨检测车辆总重、轴重、车速¨可选择多种车辆收尾方式(自动延时收尾、手工收尾、配车检器可实现自动收尾)¨可根据时间、车号、货名、客户名汇总¨支持多种打印格式¨具有超速报警功能¨仪表自诊断功能:帮助用户快速发现故障便携式称重仪:车辆超载是造成公路加速损坏的重要原因,国家交通部2000年2号令《超限运输车辆行驶公路管理规定》于2000年4月1日起执行,《规定》对各类车辆的轴载质量作了明确规定并指出“公路管理机构可根据需要在公路上设置车辆轴载质量及车货总质量检测装置,对超限运输车辆进行检测(第20条)”。
为了配合《规定》的实施,依据交通部对车辆轴类型及轴载质量的标准,我们研制了符合我国现管理规范要求的全自动公路动态轴重超限管理系统。
为适合管理部门流动检测的要求,又研制了便携式公路动态轴重超限检测仪,为交通部门实施有效的超限管理提供了强有力的手段。
工作流程及原理如下:1、在需要检测的路段(或入口)安装固定式动态电子轴计量秤。
2、车辆通过时,由轮胎识别器自动判别车型,车辆收尾识别器自动判别车辆是否整车通过,这两者信号及秤体称重信号一起传送到称重显示器。
3、称重显示器对于收集到的信号进行动态数据处理,显示整车的重量,并判断是否超载。
该数据同时显示在大屏幕上,方便司机查看。
也可以向计算机上传检测数据。
菲斯特转子秤接线图
=A2 Serial No.:05010
菲斯特
WA46 WAF1
+LCB1
Local panel 机旁柜
+AF4
+AF4
-Y10 -Y9
DOWN PIPE AERATION
-Y1
-Y2
-Y1
-S2
-S1
+A46
+A41
+A44
DRIVE ROTOR ENCODER
/36.6 /EMERGENCY SHUT OFF
E101
2
E102
3
E103
4
E104
5
E105
6
7
E106
8 E107
0V 24V/NE
/36.8 /FAULT DRIVE ROTOR /36.10 /EXCEEDING TEMPERATURE DRIVE ROTOR /36.13 /FAULT VOLTAGE LOCAL DEVICES
/32.14 LOADING /32.13 GND/C02
/32.18 SPEED /32.17 GND/C03 /32.23 SILO CONTENT /32.22 GND/C04
喂料给定 喂料反馈 负荷率 速度反馈 仓重(备用)
菲斯特
-A2.00 29.2 24VDC
BK5120
-A2.05 33.2
电压 频率 功率 最大电流
380V 50HZ 13.0KVA 70A
+EXT
WE02 WE03 WE04 WE05 WE06
EMERGENCY STOP
BINARY INPUTS
电子称电路的设计和分析 ppt课件

电阻应变式称重传感器
电阻应变式称重传感器包括两个主要部分, 一个是弹性敏感元件,利用它可以将测得的 重量转换为弹性体的应变值;另一个是电阻 应变计,它作为传感元件将弹性体的应变, 同步地转换为电阻值的变化。
•在电阻应变式称重传感器中,通过桥式电路 将电阻的变化转换为电压变化。电阻应变式 称重传感器的工作原理框图
如图所示:
• 电阻应变式称重传感器的 桥式测量电路
• R1、R2、R3、 如图所示: R4为4个应 变片电阻,
组成了桥式
测量电路, Rm为温度补 偿电阻,e 为激励电压, V为输出电 压。
• 当传感器不受载荷时,弹性敏感元件不产 生应变,粘贴在其上的应变片将不发生变
形,阻值不变,电桥平衡,输出电压为零; 当传感器受力时,即弹性敏感元件受载荷P 时,应变片就会发生变形,阻值发生变化,
去皮:在称重显示状态下,按[去皮]键, 则显示零值并去皮指示灯亮;在去皮状态下, 拿掉皮重物时按[去皮]键,可以清除皮重值。
• 标定功能:为保证仪器预定精度的可靠性 和合法性,仪器必须定期校准,为用户提供
电子秤的组成
1.电子秤的基本结构
电子秤是利用物体的重力作用来确定物体 质量(重量)的测量仪器,也可用来确定与质 量相关器也称磁弹性传感器,它 是一种力—电转换的无源传感器。它的工作 原理是利用压磁效应,将被称重量的变化转 换成传感器导磁体的导磁率变化并输出电信 号。
压磁传感器具有输出信号大,抗干扰性能 好,承载能力强,不均匀载荷对测量准确度 的影响小,能在恶劣的环境中工作,结构简
谐振式
• 谐振式称重传感器也称频率式传感器,它 是利用机械振子的固有频率或石英晶体的 谐振特性,随着被称物体重量的变化产生 频率变化现象而形成信号的一种传感器。 谐振式传感器可分为振弦式、振梁式、振 膜式、振筒式、振管式和晶体谐振式等多 种类型。
32吨电气原理图

15
K001
0509
0609
1209
1009
项目名称 图纸名称
32/5吨吊车电气原理图 配电保护柜电气原理图
设计 制图
校对 审核
图号
日期
第 1页
共 9页
202 201 ZH1
YJ4
Y11
Y21
Y31
Y41
Y1
Y3
系统电源 电源
Y11 电源
下降
遥控器接线端子 Y21 电源
下降
上升
保护 启动 停止 照明 电铃 主卷上升 主卷下降 主卷一档 主卷二档 主卷三档
1037 1041 1045 1051 2LSJX 3LSJX 4LSJX
FCX ZCX 1021 1027 1035
1039 1043 1047 1051
1053 1055 1057
CKX
CKX
1023
1029
ZCX
FCX 1JSCX K7 2JSCX 3JSCX 4JSCX 1LSJX
2LSJX 3LSJX 4LSJX
LYJ 1003
YJX1 1005 kx0 YJX2
1007
ZHJ ZHJ
1GLJ 1011 2GLJ 1013 3GLJ 1015 4GLJ 1017 LYJ
YJX1 YJX2
ZCX
YJX4 YJX5 YJX6 ZCd
1JSCX 2JSCX 3JSCX
FCX
FCX
1019
1025
1031
1LSJX
YJD1 YJD2 YJD4 YJD5 YJD6
YJX1 YJX2 YJX4 YJX5 YJX6
YJ4 YJ5
YJ7
20t粮食自动称重系统电气控制部分

准备论文及答辩
教研室审查意见:
教研室主任签字:
年月日
学院审查意见:
院长签字:
年月日
B.电气元件的选择计算;
C.控制柜结构设计及布线图设计;
③控制流程框图及控制柜的三维造型设计:
(2)技术参数及要求:
①额定计量能力:20吨/小时,计量漏斗容重1.5t;
②设备结构尺寸:≯3800x1800x2300mm;
③粮食输送与计量采用分体式结构,设备重量控制在5吨以内;
④计量设备和输送装置都采用拖挂方式转移场地,设备尽可能轻且操作简单;
⑤设计成果要求:
1)凡给定的设计内容,包括说明书、计算书、图纸等必须完整,不得有未完成的部分,不应出现缺页、少图纸现象。
2)对设计的全部内容,包括设计计算、机械构造、工作原理、液压系统、电气系统设计及控制置等,均应有清晰的了解。对设计过程、设计步骤有明确的概念,能用图纸完整地表达机械结构和电气原理的要求,有比较熟练的认识图纸能力。对运输、安装、使用等亦应有一般了解。
2、本毕业设计(论文)课题任务的内容和要求(包括原始数据、技术要求、工作要求等):
(1)设计任务:
①总体设计:
A.总体方案及总体参数的确定;
C.输送机的输送能力与计量漏斗计量能力的匹配计算;
②电气控制系统设计:
A.电气控制回路设计(包括手动和自动控制系统),要求能够对计量数据进行管理和处理(如数据储存、累加和打印等);
2016.4.17-2016.4.30
2016.5.1-2016.5.17
2016.5.18-2016.5.30
2016.6.1-2016.6.11
2016.6.12-2016.6.24
LA-007控制器控制仓秤操作说明及接线图

LA-007控制器仪表用于仓秤的操作说明简介:LA-007仪表是我公司新开发研制的一种新型称重仪表,是专门用于对仓秤进行称量显示仪表。
根据应用环境及工业运行的要求,在设计中,使用单片机控制技术,并采用特殊技术,以确保LA-007型仪表具有精度高,长期运行稳定性好,可靠性高等特点。
LA-007型仪表拥有完善、强大、通用的硬件结构,有2排显示器,下排显示器主要用于显示及设定数据,上排显示器主要用于显示仪表的状态和功能菜单。
另外,有20个键用于操作仪表。
下面,我们针对LA-007型仪表控制仓秤,对其使用方法进行说明。
数字键。
备用(输入符号键和小数点键)。
二.正常显示上部显示:-NET-下部显示:称量重量值三.事件信息:定义:称重器的所有功能都在内部受到监控,如有故障,将被输出作为事件信息.事件代码显示在上部. 事件列表:Err0:传感器信号输入过低Err1:传感器信号输入过高Err2-Err5未定义Err6:称重仓物料重量值超下限Err7:称重仓物料重量值超上限CErr2:调零超极限CErr4:系统增益超极限四.功能分配表在分配表中滚动。
Functions(功能CALPASS五.系统参数:参数是具有可变特性的数据,利用这些数据可以使系统运行时更适合现场情况要求,所有参数出厂时有预定值,这些都是有用的建议值。
参数为CALF00-CALF24,字母后的数字是参数的序号,参数分为数值和选择项两种类型。
1、输入和修改参数的步骤:调分配功能选系统参数功能上排显示确认输入密码:07734显示参数组CALF00选参数序号(如CALF00、CALF01)对于参数设定值为选项的用“上下键”修改,为实际数字的用数字键输入参数值23CALF06零点跟踪时间0.0-5.0s0.0CALF07零点跟踪宽度0-91d0CALF08动态检测时间0-9s1CALF09动态检测范围0-91d2CALF10备用CALF11备用CALF12备用CALF13备用CALF14备用CALF15系统零点0-999999t0.000CALF16系统增益1.0000CALF17传感器量程0-9999.99t100.00CALF18传感器灵敏度0-3mv/v2.00CALF19校准砝码重量0-999.999t100.00CALF20输出4-20MA下限0-20.000MA4.000CALF21输出4-20MA上限0-100.000MA20.000CALF22报警下限0-50%10.0CALF23报警上限0-100%90.0CALF24显示更新时间0-5s1.0六、标定仪表只有经过标定后,才能正常投入使用.标定要通过调用功能分配器中的调零与标定功能来完成.2七运行当所有参数设定完毕,调零及砝码标定后,即可工作在运行状态下,若系统无任何故障,则系统工作在正常状态下,此时上排显示器显示-NET-,下排显示器显示计量仓内物料数值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微机控制自动包装机
L
审 定 项目负责 审 核
日期 仪表控制箱 图别 图号 电 施
L
1
2
3
4
5
6
7
8
SB6
SB7
KA1
KA1
江苏绿天源系统工程有限公司
工程名称 子项名称
微机控制自动包装机
C65N 1P/10A
C65N 1P/6A
室主任 审 定 项目负责 审 核
设 计 校 对 绘 图 比 例
日期 控制电源原理图 图别 图号 电 施
24V24V+
S100
N
AC220V
24V
COM
SB1
SB2
B520 仪表 OUT2 OUT3
X0004
SQ1பைடு நூலகம்
SQ2
OUT8
IN4
X0006 X0007
PLC IN
X0000
X0002
X0003
BJ
PLC IN PLC IN PLC IN PLC IN
SB3
PLC IN
DC 0V X0000 启动/停止 X0002 手动卸料 OUT2 低低限 OUT3 低限 OUT8 报警
工程名称 子项名称
微机控制自动包装机
日期 输出控制原理图 图别 图号 电 施
AC380V & N 50HZ
A;B;C
LA;LB;LC
LA;LB;LC
LA;LB;LC
LA;LB;LC
LA;LB;LC
QFJX GV2-M22
QF1
QF2
QF3
QF4
QF5
KM1
KM2
KM3
KM4
KM5
U;V;W
U;V;W
U;V;W
U;V;W
U;V;W
M 3
M 3
M 3
M 3
M 3
QFJX 9KW
M1 2.2KW 大进料绞龙机
M2 0.75KW 小进料绞龙机 GV2-M07 LC1-D0610
M3 1.5KW 破拱 GV2-M08 LC1-D0610
M4 2.2KW 秤体输送机 M4 GV2-M10 LC1-D0610
DC 24V IN4 清报警 X0006 夹袋限位 X0007 夹袋请求
工程名称 子项名称 日期 输入控制原理图 图别 图号 电 施 微机控制自动包装机
江苏绿天源系统工程有限公司 室主任 审 定 项目负责 审 核 设 计 校 对 绘 图 比 例
S100
PLC OUT
PLC OUT
PLC OUT
PLC OUT
Y012A
Y012 小进料绞龙
Y013 称重完成
Y015 校准灯
Y017 夹袋阀
PLC OUT
Y018 计数器
Y019 大进料绞龙
Y01C 挂钩阀
Y016 破拱电机 秤体输送机 M4 重型输送机 M5
江苏绿天源系统工程有限公司 室主任 审 定 项目负责 审 核 设 计 校 对 绘 图 比 例
PLC OUT
PLC OUT
PLC OUT
Y012 KM2 Y013 Y015 Y017 Y018 Y019 KM1 SB4 SB5 Y01C Y016
Y012B Y019B KA2 QF2 Y018A QF1 Y019A KA2 HL1 KM2 HL2 HL3 HL5 HL7 JS KM1 KM3 QF4 Y018B N QF5 Y016A 102 104 QF3 KM4 KM5 101 103
M5 3KW 重型输送机 M5 GV2-M14 LC1-D0910
GV2-M22
GV2-M10 LC1-D0610
江苏绿天源系统工程有限公司 室主任 审 定 项目负责 审 核 设 计 校 对 绘 图 比 例
工程名称 子项名称
微机控制自动包装机
日期 电机控制图 图别 图号 电 施
1
2
3
4
5
6
7
8
A
A
B
B
C
C
仪表
D
电源启动 按钮 包装启动 手动卸料 按钮 计数器 00000 报警器 清报警 按钮
D
电源停止
快加料 蓝
慢加料 白
称重完成 黄
卸料 绿
校准灯 红
E
按钮
E
秤体输送机 重型输送机
F
F
G
G
H
H
I
I
J
J
K
K
江苏绿天源系统工程有限公司 室主任 设 计 校 对 绘 图 比 例
工程名称 子项名称