电子秤的原理方框图
生活中常见的电子秤原理是什么?附原理图拿走不谢

生活中常见的电子秤原理是什么?附原理图拿走不谢
电子秤在我们生活中应用十分的广泛,无论是我们我们称体重,还是在购买商品的时候都会用到,电子秤的种类也有很多,例如台式电子秤,手提电子秤等等,每一种都有自己的特色。
过去的老式手提秤已经逐渐淘汰,电子秤在我们日常生活中有着重要的位置,人们生活中的称重问题通通都要由它解决,对于电子秤原理大家是否了解?
在我们的日常生活中,离不开买卖,而在所有买卖中几乎都离不开秤,随着时代的发展,科技的不断研发,产品的不断更新换代,电子产品行业更是迅速,老式手提秤也逐步被电子秤替代,电子秤的生产无疑是解决了人们在买卖过程中遇到的称重问题,而且现在的电子秤设计非常的精密,让人与人之间的交易也达到了公平化。
接下来就随小编一起来了解一下电子秤原理吧!
电子秤原理图构成第一部分
电子秤的工作流程:当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。
该信号经放大电路放大输出到模数转换器。
转换成便于处理的数字信号输出到CPU运算控制。
CPU根据键盘命令以及程序将这种结果输出到显示器。
直至显示这种结果。
电子秤原理图构成第二部分
秤的分类:按原理分:电子秤、机械秤、机电结合秤;按功能分:计数秤、计价秤、计重秤;按用途分:工业秤商业秤、特种秤。
电子秤原理图构成第三部分
秤的品种:桌面秤指全称量在30Kg以下的电子秤;台秤指全称量在30-300Kg以内的电子秤;地磅指全称量在300Kg以上的电子秤;精密天平。
电子秤原理图构成第四部分
按准确度分类:I级:特种天平,精密度≥1/10万;II级:高精度天平,1/1万≤精密度<。
测控电路课程设计之电子称设计
测控电路课程设计之电子秤的设计一、设计任务1、题目:电子秤的设计1.确定结构电子秤由传感器、传感器专用电源、信号放大系统、模数转换系统及显示器等五部分组成,其原理框图如指导书图4所示。
2.设计技术指标如下:1)量程为0~1.999Kg ,2)传感器可采用悬臂梁式的称重传感器(悬臂梁上贴有应变片)。
3) 显示电路采用213为A/D 转换电路、共阴级数码管。
2、设计任务1)选择传感器2)设计传感器测量电路:通常用电桥测量电路。
3)放大电路设计由于传感器测量范围是0~2Kg ,假定选择的某款传感器的灵敏度为1mV/V 、工作电压为10V ,那么其输出信号只有0-10mV 左右;而A/D 转换的输入应为0-1.999Kg ,当量为1mV/g ,因此要求放大倍数约为200倍,一般采用两级放大器。
另外,在电路设计过程,应考虑电路抗干扰环节、稳定性。
选择低失调电压、低漂移、高稳定、经济性的芯片。
最后,电路中还应有调零和调增益的环节,才能保证电子秤没有称重时显示零读数,称重时读数正确反映被秤重量。
4)模数转换及显示系统A/D 转换器可选择MC14433,也可另选。
4)供电电源:设计一个可满足本设计需求的电源。
二、设计方案1、电子秤的主要组成电子秤由传感器、传感器专用电源、信号放大系统、模数转换系统及显示器等五部分组成,其原理框图如图4所示。
图4电子秤组成框图传感器将被测物体的重量转换成电压信号输出,放大系统把来自传感器的微弱信号放大,放大后的信号经过模数转换把模拟数字量,数字量通过数字显示器显示重量。
2、方案的选用方案一:采用应变式电阻称重传感器,将被测物体的重量转换成电压信号输出,然后采用AD620差动电路放大器把来自传感器的微弱信号放大,然后将放大后的信号经过MC14433模数转换器转换成数字量,最后经过动态扫描将数字量通过数码管显示出来,显示出来的数字就是被测物体的重量。
方案二:设计以51系列单片机AT89S52为控制核心,实现电子秤的基本控制功能。
电子秤的原理图

电子秤的原理图电子秤是一种利用电子技术和传感器原理来实现重量测量的设备。
它主要由传感器、模拟电路、数字电路和显示装置等部分组成。
在电子秤中,传感器起着至关重要的作用,它能够将重量转化为电信号,并通过电路进行放大、处理,最终显示在数字显示屏上。
传感器是电子秤的核心部件之一,它通常采用应变片传感器。
应变片传感器是一种能够将受力转化为电阻变化的传感器,当受力作用在其上时,电阻值会发生相应的变化。
在电子秤中,应变片传感器通常被安装在秤台上,当物体放在秤台上时,受力作用在传感器上,使其电阻值发生变化,通过测量电阻值的变化来确定物体的重量。
除了传感器外,模拟电路也是电子秤中不可或缺的一部分。
模拟电路主要负责对传感器输出的微小电信号进行放大和滤波处理,以保证测量的准确性和稳定性。
在模拟电路中,放大器起着至关重要的作用,它能够将微小的电信号放大成适合数字电路处理的电压信号,同时滤波电路则能够滤除杂散信号,保证测量的精准度。
数字电路是电子秤中另一个重要的组成部分,它主要负责对模拟信号进行数字化处理,并通过微处理器进行数据处理和显示。
在数字电路中,模数转换器能够将模拟信号转化为数字信号,然后经过微处理器进行数据处理和存储,最终通过显示装置将测量结果显示出来。
显示装置是电子秤的输出部分,它通常采用数码管或液晶显示屏来显示测量结果。
数码管能够直观地显示出物体的重量,而液晶显示屏则能够显示更多的信息,如重量单位、校准值等。
通过显示装置,用户能够方便地获取测量结果,实现对物体重量的准确测量。
综上所述,电子秤是一种利用电子技术和传感器原理来实现重量测量的设备,它主要由传感器、模拟电路、数字电路和显示装置等部分组成。
通过传感器将重量转化为电信号,经过模拟电路的放大和滤波处理,最终通过数字电路进行数字化处理和显示。
电子秤的原理图如上所示,通过对其原理的深入了解,能够更好地使用和维护电子秤,保证测量的准确性和稳定性。
基于应变片的电子秤设计

基于应变片的电子秤设计摘要电子秤从原理上完全摒弃了机械城利用杠杆原理的称重方式,是一种结合了多种信息处理技术的现代新型称重仪器。
电子称称量准确、快捷方便,操作简单,而且可自动计价,显示界面简单明了,已经普遍应用到日常生活中,深受人们欢迎。
本篇论文主要从硬件和软件两部分的分别进行阐述和设计。
称重传感器采集被测物体所施加的压力并转换成电信号,HX711芯片内部的放大电路和A/D转换电路把信号送到核心控制部件STC89C52单片机进行处理,再送入1602型LCD显示,用户可通过4×4矩阵键盘直接对系统输入指令,以上组成系统的硬件设计部分。
软件设计部分则根据系统所要实现的功能用C51语言进行编程,C51语言的语言结构清晰,具有极强的表达能力,可满足系统设计需要。
本系统设计要求最大称重量程为3Kg,允许误差5g,并有自动计价、超重报警功能。
最终设计出的成品最大量程5Kg,测量精度可达3g,精度高且操作简单。
关键词称重传感器;单片机;HX711芯片;LCD;矩阵键盘Design of Electronic Scale Based on Resistance Strain Gauge SensorAbstractElectronic scales completely abandon the principle of mechanical city from the principle of weighing mode, is a combination of a variety of information processing technology of modern new type of weighing instruments. Electronic scales weighing accurate, fast, easy to operate, and can be automatically priced, simple interface and clear display, has been widely applied to daily life, welcomed by the people.This paper mainly from the hardware design and software design two most elaborate. Weighing sensor collection object to be measured pressure and converted into electrical signals, HX711 chip internal amplifier and A / D converter circuit sends signals to the control section STC89C52 core microcontroller for processing, and then into 1602LCD display, the user can be 4 ×4 matrix keyboard directly to the input command system, consisting of more than hardware design of the system. Software design according to the system functions to be achieved with the C51 programminglanguage, clear language structure C51 language, with strong communication skills, to meet the system design requirements. The design requirements for the maximum weighing range 3Kg, tolerance ±5g, and automatic valuation, overweight alarm function. The final design of the finished maximum range 5Kg, the measurement accuracy of up to 3g, high precision and simple operation.Key WordsThe weighing sensor;MCU;HX711 chip;LCD;Matrix keyboard第一章绪论1. 背景介绍称重作为多数货品交易中一种必要的度量手段,自古以来一直被人们所重视,称重技术的一个重要参数就是质量。
电子秤工作原理

电子秤工作原理1.工作原理:电子秤的工作原理以电子元件(称重传感器,放大电路,AD转换电路,单片机电路,显示电路,键盘电路,通讯接口电路,稳压电源电路等电路组成。
工作流程说明:当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。
该信号经放大电路放大输出到模数转换器。
转换成便于处理的数字信号输出到CPU运算控制。
CPU根据键盘命令以及程序将这种结果输出到显示器。
直至显示这种结果。
部分电子秤的原理方框图:程式 K/B(按键) ↑ Fx →传感器→ OP放大→ A/D转换→ CPU →显示驱动→显示屏↓记忆体工作流程说明:当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。
该信号经放大电路放大输出到模数转换器。
转换成便于处理的数字信号输出到CPU运算控制。
CPU根据键盘命令以及程序将这种结果输出到显示器。
直至显示这种结果。
第二部分秤的分类: 1.按原理分:电子秤机械秤机电结合秤 2.按功能分:计数秤计价秤计重秤 3.按用途分:工业秤商业秤特种秤第三部分秤的种类: 1.桌面秤指全称量在30Kg以下的电子秤 2.台秤指全称量在30-300Kg 以内的电子秤 3.地磅指全称量在300Kg以上的电子秤 4.精密天平第四部分按精确度分类: I级:特种天平精密度≥1/10万 II级:高精度天平 1/1万≤精密度<1/10万 III级:中精度天平1/1000≤精密度<1/1万 IV级:普通秤1/100≤精密度<1/1000第五部分专业术语: 1.最大称量:一台电子秤不计皮重,所能称量的最大的载荷; 2.最小称量:一台电子秤在低于该值时会出现的一个相对误差; 3.安全载荷: 120%正常称量范围; 4.额定载荷:正常称量范围; 5.允许误差:等级检定时允许的最大偏差; 6.感量:一台电子秤所能显示的最小刻度;通常用“d”来表示; 7.解析量:一台具有计数功能的电子秤,所能分辩的最小刻度; 8.解析度:一台具有计数功能的电子秤,内部具有分辩能力的一个参数; 9.预热时间:一台秤达到各项指标所用的时间; 10.精度:感量与全称量的比值; 11.电子秤使用环境温度为: -10摄氏度到 40摄氏度 12.台秤的台面规格: 25cm X 30cm 30cm X 40cm 40cm X 50cm 42cm X 52cm 45cm X 60cm第六部分电子秤的特点: 1.实现远距离操作; 2.实现自动化控制; 3.数字显示直观、减小人为误差; 4.准确度高、分辩率强; 5.称量范围广; 6.特有功能:扣重、预扣重、归零、累计、警示等; 7.维护简单; 8.体积小; 9.安装、校正简单; 10.特种行业,可接打印机或电脑驱动; 11.智能化电子秤,反应快,效率高;第七部分电子秤检查过程: 1.首先整体检查:有无磨损和损坏; 2.能否开机:开机后是否从0到9依次显示、数字是否模糊、能否归零; 3.有无背光; 4.用砝码测试能否称重; 5.充电器是否完好,能否使用; 6.配件是否齐全;第八部分传感器类型: 1.电阻式:价格适中、精度高、使用广泛; 2.电容式:体积小、精度低; 3.磁浮式:特高精度、造价高; 4.油压式:现市场上已淘汰; 显示器种类: 1.LCD(液晶显示):免插电、省电、附带背光; 2.LED:免插电、耗电、很亮; 3.灯管:插电、耗电、很高; K/B(按键)类型: 1.薄膜按键:触点式; 2.机械按键:由许多单独按键组合在一起; 传感器的特性: 1.额定载荷; 2.输出灵敏度; 3.非线性; 4.滞后; 5.重复性; 6.蠕变; 7.零点输出影响; 8.额定输出温度影响; 9.零点输入; 10.输入阻抗; 11.输出阻抗; 12.绝缘阻抗; 13.容许激励电压;(5-18V)第九部分传感器损坏后现象: 1.称量不准; 2.显示不归零; 3.显示的数字乱跳判断传感器的+E、-E、+S、-S 1.先用电阻档测4条线两两这间的电阻值,共有6组。
电子秤的原理是什么?
电子秤的原理是什么?电子秤,属于衡器的一种,是利用胡克定律或力的杠杆平衡原理测定物体质量的工具。
电子秤主要由承重系统(如秤盘、秤体)、传力转换系统(如杠杆传力系统、传感器)和示值系统(如刻度盘、电子显示仪表)3部分组成。
按结构原理可分为机械秤、电子秤、机电结合秤三大类。
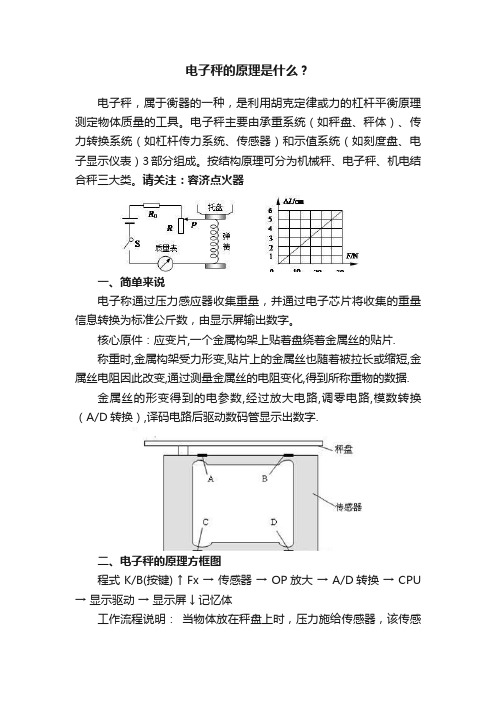
请关注:容济点火器一、简单来说电子称通过压力感应器收集重量,并通过电子芯片将收集的重量信息转换为标准公斤数,由显示屏输出数字。
核心原件:应变片,一个金属构架上贴着盘绕着金属丝的贴片.称重时,金属构架受力形变,贴片上的金属丝也随着被拉长或缩短,金属丝电阻因此改变,通过测量金属丝的电阻变化,得到所称重物的数据.金属丝的形变得到的电参数,经过放大电路,调零电路,模数转换(A/D转换),译码电路后驱动数码管显示出数字.二、电子秤的原理方框图程式 K/B(按键) ↑ Fx → 传感器→ OP放大→ A/D转换→ CPU → 显示驱动→ 显示屏↓ 记忆体工作流程说明:当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。
该信号经放大电路放大输出到模数转换器。
转换成便于处理的数字信号输出到CPU运算控制。
CPU根据键盘命令以及程序将这种结果输出到显示器。
直至显示这种结果。
三、电子秤到底是怎么给出读数的首先要明确的是,对于绝大多数「秤」而言,我们测量的不是质量,我们测量的只是重力。
用标准砝码的天平测量的才是质量,大多数弹簧秤、电子秤测量的其实都是重力。
读数是10千克,意思是说这个物体的重力与10千克物体在这个地方产生的重力相同。
可能你觉得没有区别,但如果你跑到月球上,天平的结果不会变,但是弹簧秤和电子秤的结果会大幅改变。
其次要明确的是,力是无法直接测量的,我们测量的只是变形。
力是一个非常抽象的概念而已,我们无法直接测量力,我们能测量的只是力的效应,也就是力作用在某些物体上之后这些物体的变形。
数字电子秤设计
本数字电子秤设计是由电源模块、A/D转换模块、放大模块、数字显示模块、自动切换模块五大模块组成。
采用压敏4片电阻构成的电桥测量电路来采集极其微小的电压信号,然后送入放大电路放大后送入A/D转换芯片CC7107,使得输入电压信号转换成数字量来输出;再有译码电路转换模块直接连接数码显示管构成,显示实际测量值。
同时根据输出,自动判断出所加压力的大小来改变量程,实现自动换挡。
该设计比较简单,方便制作生产。
关键词:电子秤转换器重量传感器放大器AbstractThis digital electronic scale by the power module is designed, A / D conversion module, amplifier module, a digital display module, the module automatically switches five modules. Bridge measurement circuit using four resistors sensitive to collect tiny voltage signal is then fed into the amplifier circuit A / D converter chip CC7107, so that the input signal is converted into digital voltage outputs; Further translation code conversion module circuits directly connected digital display tubes, shows the actual measured values. Meanwhile according to the output, automatically determine the size of the applied pressure to change the range, automatic shift. The design is simple, easy to produce and production. KEYWORDS :digital electronic scale weighing sensor amplifier中文摘要..................................................................... 英文摘要..................................................................... 前言..................................................... 错误!未定义书签。
电子称1
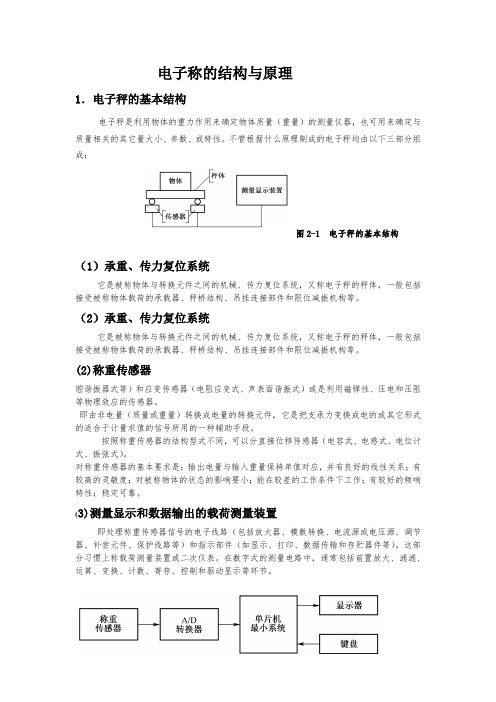
电子称的结构与原理1.电子秤的基本结构电子秤是利用物体的重力作用来确定物体质量(重量)的测量仪器,也可用来确定与质量相关的其它量大小、参数、或特性。
不管根据什么原理制成的电子秤均由以下三部分组成:图2-1 电子秤的基本结构(1)承重、传力复位系统它是被称物体与转换元件之间的机械、传力复位系统,又称电子秤的秤体,一般包括接受被称物体载荷的承载器、秤桥结构、吊挂连接部件和限位减振机构等。
(2)承重、传力复位系统它是被称物体与转换元件之间的机械、传力复位系统,又称电子秤的秤体,一般包括接受被称物体载荷的承载器、秤桥结构、吊挂连接部件和限位减振机构等。
(2)称重传感器腔谐振器式等)和应变传感器(电阻应变式、声表面谐振式)或是利用磁弹性、压电和压阻等物理效应的传感器。
即由非电量(质量或重量)转换成电量的转换元件,它是把支承力变换成电的或其它形式的适合于计量求值的信号所用的一种辅助手段。
按照称重传感器的结构型式不同,可以分直接位移传感器(电容式、电感式、电位计式、振弦式)。
对称重传感器的基本要求是:输出电量与输入重量保持单值对应,并有良好的线性关系;有较高的灵敏度;对被称物体的状态的影响要小;能在较差的工作条件下工作;有较好的频响特性;稳定可靠。
(3)测量显示和数据输出的载荷测量装置即处理称重传感器信号的电子线路(包括放大器、模数转换、电流源或电压源、调节器、补尝元件、保护线路等)和指示部件(如显示、打印、数据传输和存贮器件等)。
这部分习惯上称载荷测量装置或二次仪表。
在数字式的测量电路中,通常包括前置放大、滤滤、运算、变换、计数、寄存、控制和驱动显示等环节。
图2 电子秤测量系统的结构框图当被称物体放置在秤体的秤台上时,其重量便通过秤体传递到称重传感器,传感器随之产生力-电效应,将物体的重量转换成与被称物体重量成一定函数关系(一般成正比关系)的电信号(电压或电流等)。
此信号由放大电路进行放大、经滤波后再由模/数(A/D)器进行转换,数字信号再送到微处器的CPU处理,CPU不断扫描键盘和各种功能开关,根据键盘输入内容和各种功能开关的状态进行必要的判断、分析、由仪表的软件来控制各种运算。
基于单片机的电子秤原理讲解

修订历史1.主要框图说明:2.测重原理讲解:基本原理讲解1.3kg 传感器满量程输出电压=激励电压*灵敏度1.0mv/v例如:供电电压是3v 乘以灵敏度1.0mv/v=满量程3mv 。
相当于有3Kg 重力产生时候产生3mV 的电压。
2. 711模块对产生的3mV 电压进行采样。
概述:711模块A 通道带有128倍信号增益,可以将3mV 的电压放大128倍,然后采样输出24bit AD 转换的值,单片机通过指定时序将24bit 数据读出。
详细讲解程序计算原理:步骤1:如何计算传感器供电电压HX711可以在产生VAVDD和AGND电压,即711模块上的E+和E-电压。
该电压通过VAVDD=VBG(R1 +R2 )/R2计算。
VBG 为模块儿基准电压1.25vR1 = 20K,R2 = 8.2K因此得出VAVDD = 4.3V(为了降低功耗,该电压只在采样时刻才有输出,因此用万用表读取的值可能低于4.3v,因为万用表测量的是有效值。
)步骤2:如何计算AD输出最大值在4.3V的供电电压下3Kg的传感器最大输出电压是4.3v*1mv/V = 4.3mV经过128倍放大后,最大电压为4.3mV*128 = 550.4mV经过AD转换后输出的24bit 数字值最大为:550.4mV*224/4.3V ≈2147483步骤3:程序中数据如何转换程序中通过HX711_Buffer = HX711_Read();获取当前采样的AD值,最大2147483,存放在long型变量HX711_Buffer中,除以100,便于后续计算。
Weight_Shiwu = HX711_Buffer/100;Weight_Shiwu 最大为21474。
步骤4:如何将AD值反向转换为重力值。
假设重力为A Kg,(x<3Kg),测量出来的AD值为y3Kg传感器输出,发送给AD模块儿的电压为A Kg * 4.3mV / 3Kg = 1.43A mV 经过128倍增益后为128 * 1.43A = 183.46AmV转换为24bit数字信号为183.46A mV * 224 / 4.3V = 715801.8A所以y = 715801.8A /100 = 7158.018A因此得出A = y / 7158.018 Kg ≈y / 7.16 g所以得出程序中计算公式Weight_Shiwu = (unsigned int)((float)Weight_Shiwu/7.16+0.05);//+0.05是为了四舍五入百分位特别注意:因为不同的传感器斜率特性曲线不一样,因此,每一个传感器需要矫正这里的7.16这个除数。
【电子秤设计实验】电子秤实验报告

【电子秤设计实验】电子秤实验报告【--个人简历制作】便携式电子秤的设计实现班级:学号:姓名:摘要手提电子秤具有称重精确度高,简单实用,携带方便成成本低,制作简单,测量准确,分辨率高,不易损坏和价格便宜等优点。
是家庭购物使用的首选。
本次实验目的在于:通过对便携式电子秤的设计与制作,了解电阻应变片的工作原理,掌握其使用方法;掌握数码显示电路的设计使用方法;掌握模数转换器、仪用放大器的使用方法;掌握电子电路系统设计的基本方法,培养提高综合利用多学科相关知识进行初步工程设计与实际装调系统电路的能力。
本次便携式电子秤设计采用箔式电阻应变片E350~ZAA作为传感器,将力信号转换为电压信号,差动电路采用INA114来放大微小电压信号,转换电路采用双积分A/D转换器ICL进行A/D转换,显示电路采用LED数码管。
最终实现了将被称重物体的质量显示在数码管上的功能,称重范围为2kg 以内,单位为g。
经过最终测量,所设计制作完成的电子秤称重最大绝对误差为5g,关键词:便携式;电子秤;应变片; 7107一、设计选题及设计任务要求设计选题:便携式电子秤的设计实现任务与要求:设计一个LED数码显示的便携式电子秤,要求如下1.采用电阻应变式传感器2.称重范围为0 ~ 2kg3.测量精度:不低于20克二、方案设计与论证设计方案:方案一:基于单片机的便携式电子秤1)原理框图图1-1 基于单片机的便携式电子秤原理框图2)系统设计思路、工作原理及单片机程序流图称重传感器根据压力的变化提供相应的线性变化的电信号,该电信号经过高精度差动放大器放大。
输入给双积分型模数转换器。
转化为数字信号,数字信号可直接由单片机以串行方式读入。
单片机选用STC89C52型单片机,P0口定义为输出口,其中P0.0~P0.6输出要显示数据的段码。
P1口中的P1.0~P1.3也定义为输出,显示输出数据的位码。
显示器用动态扫描。
3)该设计方案优缺点a.优点:该系统采用了单片机作为显示模块的驱动电路,具有较好的系统扩展性,在显示压力的同时,还可以通过单片机的其他管脚输出信号以达到的功能的扩展。
电子秤的工作原理ppt课件

称重传感器类型
• 称重传感器 按转换方法分为:光电式、液压 式、电磁力式、电容式、磁极变形式、振动 式、陀螺仪式、电阻应变式等8类,以电阻应 变式使用最广。 • 下面我们来详细介绍以电阻应变式作为称重 传感器的电子秤。
电阻应变式传感器
• 电子秤,主要是由电桥电路 及电阻应变式传感器组成, 在现代测量技术中常常需要 将非电量,利用传感器转变成 电量,后再进行测量,电阻 应变式传感器是一种利用金 属电阻应变片,将应变转换 为电阻变化的传感器,它一 般分为金属丝式和箔式两类, 这里分别介绍其结构和工作 原理, 其结构如图所示:
ps:惠斯通电桥
• 科技名词定义 • 中文名称:惠斯通电桥 英文名称: Wheatstone bridge • 定义:测量电阻值的一种四臂电桥,被测电阻 为一个臂,其余三个臂是已知标准电阻,其中 至少有一个臂是可调的。 应用学科:机械工程 (一级学科);电测量仪器仪表(二级学科) ;电测量器具和设备(三级学科) • 惠斯通电桥(又称单臂电桥)是一种可以精确 测量电阻的仪器。图所示是一个通用的惠斯通 电桥。电阻R1,R2,R3,R4叫做电桥的四个 臂,G为检流计,用以检查它所在的支路有无 电流。当G无电流通过时,称电桥达到平衡。 平衡时,四个臂的阻值满足一个简单的关系, 利用这一关系就可测量电阻。
电阻应变式传感器原理
• 测量力时, 可将电阻应变片粘贴在承受被测力的弹性元件上当力作用在弹性元 件上时, 它将产生应变, 通过粘贴胶将此应变传递给电阻应变片, 使应变片的电 阻产生变化, 此现象称为电阻应变效应因为弹性元件的应变与所承受的力的大 小成比例,所以应用桥式测量电路测出电阻应变片的电阻变化值即可测出力的 大小导体的电阻值可以用下式计算 • 当此应变片两端受拉或受压以后, 它将发生变化, 对上式进行微分, 得
电子秤原理及电子秤原理图(打印版)

电子秤原理及电子秤原理图一、名词解释利用作用于物体上的重力来测量该物体质量(重量)的计量仪器,装有电子装置的秤为电子秤。
二、工作原理秤重物品经由装在机构上的重量传感器,将重力转换为电压或电流的模拟讯号,经放大及滤波处理后由A/D处理器转换为数字讯号,数字讯号由中央处理器(CPU)运算处理,而周边所须要的功能及各种接口电路也和CPU连接应用,最后由显示屏幕以数字方式显示。
电子秤原理图:三、主要组成组件1.重量传感器2.放大器电路3.滤波器电路4.模拟数字转换器5.中央处理器6.电源供应电路7.按键8.外壳9.机构 10.秤盘电子秤设计2(2006-05-05 09:08:26)第五部分:附录电子秤的信号采集、处理、显示的程序 .#include <reg52.h>#include<absacc.h>//ad 控制线#define ad_244 XBYTE[0xbfff];sbit ad_stb=P3^3;sbit ad_start=P1^1;//lcd 控制线sbit lcd_di=P1^7;sbit lcd_rw=P1^2;sbit lcd_e=P1^0;//7289 控制线sbit cs7289=P1^3;sbit clk7289=P1^4;sbit dio7289=P1^5;//sbit key7289=P1^6; //7289 查询方式sbit key7289=P3^2; //7289 中断方式sbit baoj=P3^5;//7289 子程序void ini_7289(void);void send7289(short);short receive(void);void keyin(void);//lcd 子程序void ini_lcd(void);void lcdd_send(short); void lcdi_send(short); void chk_busy(void);//ad 子程序void ad(void);void baojing(void);void d_change(long);// 初始化,编号,日期void ini();void error1(void);void nop1(){}void change(s)int dealy; // 全局变量short sh=0; // 商品号short dot=0; // 小数点标志bit list=0;short qb=0;char xdata shuju[7]=""; short xdata bcd[5];char xdata s1[16]=" 单价 : 元 ";char xdata s2[16]=" 重量 : Kg";char xdata s3[16]=" 金额 : 元 ";char xdata s4[16]=" 累计 : 元 ";char code message0[]=" 信息学院山东大学 ";char code message1[]=" 输入收银员代号 :";char code message2[]=" 输入日期 :";char code message3[16]=" -- 山东大学 -- ";char code message5[16]=" 垃圾公司欢迎您 !!";char xdata bianhao[16]=" 收银员: ";char xdata riqi[16]=" - - ";long int xdata zongjia=0,jine=0,jine1=0;int xdata shizhong=0,pizhong=0,zhongliang=0;long int xdata qingdan[20][4];char code shangpin[11][4]={{" 单价 "},{" 苹果 "},{" 梨 "},{" 花生 "},{" 大米 "}, {" 桃子 "},{" 塑料 "},{" 瓜子 "},{" 桔子 "},{" 香蕉 "},{" 玉米 "}};long int xdata danjia[11]={0,2,3635,5502,0,3320,5502,660,3210,6600,5600};char xdata jiage[6]={0x0,0x0,0x0,0xfe,0x0,0x0}; // 0.00short xdata xiuzheng[]={0,2,5,6,7,8,9,12,13};char s[16];{s[6]=shuju[0];s[7]=shuju[1];s[8]=shuju[2];s[9]=shuju[3];s[10]=shuju[4];s[11]=shuju[5];s[12]=shuju[6];}//**************************************************************** void main(){short i,j;long int x,z;int y;int xdata duilie[3]={0};P1=0xff;ini_lcd(); // 初始化 LCDlcdi_send(0x8a);while(message0[i]) lcdd_send(message0[i++]);ini_7289(); // 初始化 7289pizhong=ad1();lcdi_send(0x1); // 总清屏ini(); // 初始页面 , 收银员编号,日期lcdi_send(0x1); // 总清屏EA=1;EX0=1; // 中断//EX1=1;//ad_start=1;while(1){if(list){lcdi_send(0x80); // 显示单位名称for(i=0;i<16;i++) lcdd_send(message3[i]); x=qingdan[0][0]; // 商品名单价for(i=0;i<4;i++) s1[i]=shangpin[x][i];x=qingdan[0][1];d_change(x); change(s1);lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s1[i]);x=qingdan[0][2]; // 显示重量d_change(x); change(s2);s2[10]=s2[9];s2[9]='.';if(s2[8]==32) s2[8]=0x30;lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s2[i]);x=qingdan[0][3];d_change(x); change(s3);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(s3[i]); // 以上为第一页EA=0;EX0=0; // 关键盘中断for(j=1;j<qb;j++){while(key7289);x=qingdan[j][2];d_change(x); change(s2); // 显示数据s2[10]=s2[9];s2[9]='.'; if(s2[8]==32) s2[8]=0x30;lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s2[i]);x=qingdan[j][1];d_change(x); change(s1);x=qingdan[j][0];for(i=0;i<4;i++) s1[i]=shangpin[x][i];lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s1[i]);x=qingdan[j][3];d_change(x); change(s3);lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s3[i]);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(0x20);lcdi_send(0x98);while(key7289==0);}while(key7289);d_change(zongjia); change(s4);lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s4[i]);lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(bianhao[i]); lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(message5[i]); lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(riqi[i]);list=0;while(key7289==0);while(key7289==1);while(key7289==0);EA=1;EX0=1;}else{ y=0;/* duilie[2]=duilie[1]; // 数字滤波duilie[1]=duilie[0];y=ad1();duilie[0]=y>>1;x=duilie[0];x=x<<1;x=x+duilie[1]+duilie[2]; */zhongliang=ad1();shizhong=zhongliang-pizhong; // 数据转换x=danjia[sh];jine1=shizhong*x;jine=jine1/1;d_change(shizhong); change(s2); // 显示数据s2[10]=s2[9]; s2[9]='.';if(s2[8]==32) s2[8]=0x30;lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s2[i]);d_change(danjia[sh]); change(s1);for(i=0;i<4;i++) s1[i]=shangpin[sh][i]; lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s1[i]);d_change(jine); change(s3);lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s3[i]);d_change(zongjia); change(s4);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(s4[i]);lcdi_send(0x98);//while(1);}}}void keyin(void) interrupt 0 using 0 // 中断 0 服务程序{char X,i;long int y;send7289(0x15); // 接收数据X=receive();cs7289=1;X=X&0x1f;switch(X){case 0xf : {zongjia=zongjia+jine;qingdan[qb][0]=sh;qingdan[qb][1]=danjia[sh];qingdan[qb][2]=shizhong;qingdan[qb][3]=jine;qb++; sh=0;dot=0;danjia[0]=0;for(i=0;i<6;i++) jiage[i]=0;}break; // 累加case 0xe : pizhong=zhongliang; break; // 去皮case 0xd : {danjia[sh]=0;dot=0;} break; // 清单价case 0xc : {zongjia=0;jine=0;dot=0;list=0;qb=0;pizhong=0; if(sh==0) danjia[sh]=0;} break; // 总清case 0xa : dot=1;break; // 点case 0xb : list=1;break; // 清单case 0x19 : sh=10;break;case 0x18 : sh=9;break;case 0x17 : sh=8;break;case 0x16 : sh=7;break;case 0x15 : sh=6;break;case 0x14 : sh=5;break;case 0x13 : sh=4;break;case 0x12 : sh=3;break;case 0x11 : sh=2;break;case 0x10 : sh=1;break;case 0x1f :case 0x1e :case 0x1d :case 0x1c :case 0x1a : break;case 0x1b : dot=1;break;default :{ if(dot==0) {jiage[0]=jiage[1];jiage[1]=jiage[2];jiage[2]=X;} if(dot==1) {jiage[4]=X;dot++; }else if(dot==2) {jiage[5]=X; dot++;}else if(dot>2) break;// lcdi_send(0x84);y=jiage[0];y=y*10+jiage[1];y=y*10+jiage[2];y=y*10+jiage[4];danjia[sh]=y*10+jiage[5];}}while(key7289==0); // 等待键盘松开}/*void ad(void) interrupt 2 using 1{short x,y;x=ad_244;y=x;if(x&0x80) baojing();else x=x>>4;y=y&0xf;bcd[x]=y;} */// 初始页面void ini() // 输入收银员编号 , 日期{short i,j;char X;lcdi_send(0x80); // 提示输入收银员编号i=0;while(message1[i]) lcdd_send(message1[i++]); for(i=8;i<12;i++){while(key7289);send7289(0x15); // 接收数据X=receive();cs7289=1;bianhao[i]=X+0x30;lcdi_send(0x93);for(j=8;j<16;j++) lcdd_send(bianhao[j]);while(key7289==0);}lcdi_send(0x88); // 提示输入日期i=0;while(message2[i]) lcdd_send(message2[i++]); for(i=0;i<10;i++) // 输入日期{if(i==4||i==7) i++;while(key7289==1);send7289(0x15); // 接收数据X=receive();cs7289=1;riqi[i]=X+0x30;j=0;lcdi_send(0x9a);for(j=0;j<10;j++) lcdd_send(riqi[j]);while(key7289==0);}while(key7289);nop1();while(key7289==0);nop1();lcdi_send(0x1);}//LCD 子程序void ini_lcd() //LCD 初始化子程序{lcdi_send(0x30);lcdi_send(0x1); // 总清lcdi_send(0xc);lcdi_send(0x2); // 光标右移, AC+1}void lcdd_send(short X) //LCD 发送数据子程序{chk_busy();nop1();lcd_di=1;lcd_rw=0;lcd_e=0;P0=X;for(dealy=0;dealy<5;dealy++);//lcd_e=1; X=X;P0=0xff;}void lcdi_send(short X) //LCD 发送指令子程序{chk_busy();nop1();lcd_di=0;lcd_rw=0;lcd_e=0;P0=X;for(dealy=0;dealy<5;dealy++);//lcd_e=1; X=X;P0=0xff;}void chk_busy(){short i=0xff;while(i&0x80){lcd_di=0;lcd_rw=1;lcd_e=0;i=P0;lcd_e=1;}}//7289 子程序void ini_7289(){short i;cs7289=1; key7289=1; dio7289=1; //7289 初始化子程序for(i=0;i<50;i++)for(dealy=0;dealy<5;dealy++); // 延时 25mssend7289(0xa4); cs7289=1;}void send7289(short X) //7289 发送数据子程序{short i,j=1;cs7289=0;for(dealy=0;dealy<6;dealy++); // 延时 50us for(i=7;i>=0;i--){j=j<<i;dio7289=X&j;j=1;j=1;clk7289=1;for(dealy=0;dealy<1;dealy++) ; // 延时 10us clk7289=0;for(dealy=0;dealy<1;dealy++) ; // 延时 10us }dio7289=0;}short receive() //7289 接收数据子程序{short i,X=0;dio7289=1;for(dealy=0;dealy<6;dealy++); // 延时 50us for(i=0;i<=7;i++){clk7289=1;for(dealy=0;dealy<1;dealy++); // 延时 10usX=X<<1;if(dio7289)X++;clk7289=0;for(dealy=0;dealy<1;dealy++); // 延时 10us }dio7289=0;return(X);}//ad//AD 子程序int ad1(){short k,x;int ad_zhi=0,xz;EA=0;ad_start=1;for(k=0;k<5;k++){ while(ad_stb);x=ad_244;x=x&0xf;ad_zhi=ad_zhi*10+x;}ad_start=0;EA=1;EX0=1;ad_zhi=ad_zhi>>1;xz=ad_zhi-50;xz=xz/100;ad_zhi=ad_zhi+xiuzheng[xz];return(ad_zhi);void d_change(long X){char qian,bai,shi,ge,shifen,baifen; long int yu;if(X>) error1();qian=X/100; yu=X%100;bai=yu/10; yu=yu%10;shi=yu/1; yu=yu%1;ge=yu/100; yu=yu%100;shifen=yu/10;baifen=yu%10;qian=qian+0x30;bai=bai+0x30;shi=shi+0x30;ge=ge+0x30;shifen=shifen+0x30;baifen=baifen+0x30;if(qian==0x30){qian=0x20;if(bai==0x30){bai=0x20;if(shi==0x30) shi=0x20;}}shuju[0]=qian;shuju[1]=bai;shuju[2]=shi;shuju[3]=ge;shuju[4]='.';shuju[5]=shifen;shuju[6]=baifen;}void baojing(){short i;for(i=0;i<50;i++){baoj=0;for(dealy=0;dealy<10;dealy++); baoj=1;for(dealy=0;dealy<10;dealy++);}}摘要本系统采用单片机 AT89S52 为控制核心,实现电子秤的基本控制功能。
电子秤的原理方框图

第一部分电子秤的原理方框图:程式K/B(按键)↑ Fx → 传感器→ OP放大→ A/D转换→ CPU → 显示驱动→ 显示屏↓ 记忆体工作流程说明:当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。
该信号经放大电路放大输出到模数转换器。
转换成便于处理的数字信号输出到CPU运算控制。
CPU根据键盘命令以及程序将这种结果输出到显示器。
直至显示这种结果。
第二部分秤的分类: 1.按原理分:电子秤机械秤机电结合秤 2.按功能分:计数秤计价秤计重秤 3.按用途分:工业秤商业秤特种秤第三部分秤的种类:1.桌面秤指全称量在30Kg以下的电子秤 2.台秤指全称量在30-300Kg以内的电子秤 3.地磅指全称量在300Kg以上的电子秤 4.精密天平第四部分按精确度分类:I级:特种天平精密度≥1/10万II级:高精度天平1/1万≤精密度<1/10万III级:中精度天平1/1000≤精密度<1/1万IV级:普通秤1/100≤精密度<1/1000第五部分专业术语: 1.最大称量:一台电子秤不计皮重,所能称量的最大的载荷; 2.最小称量:一台电子秤在低于该值时会出现的一个相对误差; 3.安全载荷:120%正常称量范围; 4.额定载荷:正常称量范围; 5.允许误差:等级检定时允许的最大偏差; 6.感量:一台电子秤所能显示的最小刻度;通常用“d”来表示;7.解析量:一台具有计数功能的电子秤,所能分辩的最小刻度; 8.解析度:一台具有计数功能的电子秤,内部具有分辩能力的一个参数; 9.预热时间:一台秤达到各项指标所用的时间; 10.精度:感量与全称量的比值; 11.电子秤使用环境温度为:-10摄氏度到40摄氏度12.台秤的台面规格:25cm X 30cm30cm X 40cm 40cm X 50cm 42cm X 52cm 45cm X 60cm第六部分电子秤的特点: 1.实现远距离操作; 2.实现自动化控制; 3.数字显示直观、减小人为误差; 4.准确度高、分辩率强; 5.称量范围广; 6.特有功能:扣重、预扣重、归零、累计、警示等; 7.维护简单; 8.体积小; 9.安装、校正简单; 10.特种行业,可接打印机或电脑驱动; 11.智能化电子秤,反应快,效率高;第七部分电子秤检查过程: 1.首先整体检查:有无磨损和损坏; 2.能否开机:开机后是否从0到9依次显示、数字是否模糊、能否归零; 3.有无背光; 4.用砝码测试能否称重; 5.充电器是否完好,能否使用; 6.配件是否齐全;第八部分传感器类型: 1.电阻式:价格适中、精度高、使用广泛; 2.电容式:体积小、精度低; 3.磁浮式:特高精度、造价高; 4.油压式:现市场上已淘汰; 显示器种类:1.LCD(液晶显示):免插电、省电、附带背光; 2.LED:免插电、耗电、很亮; 3.灯管:插电、耗电、很高; K/B(按键)类型:1.薄膜按键:触点式; 2.机械按键:由许多单独按键组合在一起; 传感器的特性: 1.额定载荷; 2.输出灵敏度; 3.非线性; 4.滞后; 5.重复性; 6.蠕变; 7.零点输出影响; 8.额定输出温度影响; 9.零点输入; 10.输入阻抗; 11.输出阻抗; 12.绝缘阻抗; 13.容许激励电压;(5-18V)第九部分传感器损坏后现象:1.称量不准; 2.显示不归零; 3.显示的数字乱跳判断传感器的+E、-E、+S、-S 1.先用电阻档测4条线两两这间的电阻值,共有6组。
电子称框图

传感器接口的参数
其中各个管脚的含义及技术参数如下:
1:VCC +5V 传感器内部电路的工作电源
2:GND 传感器内部工作电路的地
3:+15V 光电检测电路的工作电源
4:光电检测的输出点
5:-15V 光电检测电路的工作电源
6:NC
7:传感器内部补偿电路的电源
8:传感器内部补偿电路的电源
9:动圈的输入电压
10:动圈的输入电压
7-8引脚是传感器内部补偿电路的输入电压,是一个差分电压,最大压差在4V左右,一般工作在1V左右。
9-10引脚是用于平衡调节而输入给动圈的电压,动圈的电阻一般在200欧姆左右,这是个差分电压,最大允许压差在6V左右,一般要求工作在3V左右进行调节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一部分电子秤的原理方框图:
程式K/B(按键)
↑ Fx → 传感器→ OP放大→ A/D转换→ CPU → 显示驱动→ 显示屏
↓ 记忆体
工作流程说明:当物体放在秤盘上时,压力施给传感器,该传感器发生形变,从而使阻抗发生变化,同时使用激励电压发生变化,输出一个变化的模拟信号。
该信号经放大电路放大输出到模数转换器。
转换成便于处理的数字信号输出到CPU运算控制。
CPU根据键盘命令以及程序将这种结果输出到显示器。
直至显示这种结果。
第二部分秤的分类: 1.按原理分:电子秤机械秤机电结合秤 2.按功能分:计数秤计价秤计重秤 3.按用途分:工业秤商业秤特种秤
第三部分秤的种类:1.桌面秤指全称量在30Kg以下的电子秤 2.台秤指全称量在30-300Kg以内的电子秤 3.地磅指全称量在300Kg以上的电子秤 4.精密天平
第四部分按精确度分类:I级:特种天平精密度≥1/10万II级:高精度天平1/1万≤精密度<1/10万III级:中精度天平1/1000≤精密度<1/1万IV级:普通秤1/100≤精密度<1/1000
第五部分专业术语: 1.最大称量:一台电子秤不计皮重,所能称量的最大的载荷; 2.最小称量:一台电子秤在低于该值时会出现的一个相对误差; 3.安全载荷:120%正常称量范围; 4.额定载荷:正常称量范围; 5.允许误差:等级检定时允许的最大偏差; 6.感量:一台电子秤所能显示的最小刻度;通常用“d”来表示;
7.解析量:一台具有计数功能的电子秤,所能分辩的最小刻度; 8.解析度:一台具有计数功能的电子秤,内部具有分辩能力的一个参数; 9.预热时间:一台秤达到各项指标所用的时间; 10.精度:感量与全称量的比值; 11.电子秤使用环境温度为:-10摄氏度到40摄氏度12.台秤的台面规格:25cm X 30cm
30cm X 40cm 40cm X 50cm 42cm X 52cm 45cm X 60cm
第六部分电子秤的特点: 1.实现远距离操作; 2.实现自动化控制; 3.数字显示直观、减小人为误差; 4.准确度高、分辩率强; 5.称量范围广; 6.特有功能:扣重、预扣重、归零、累计、警示等; 7.维护简单; 8.体积小; 9.安装、校正简单; 10.特种行业,可接打印机或电脑驱动; 11.智能化电子秤,反应快,效率高;
第七部分电子秤检查过程: 1.首先整体检查:有无磨损和损坏; 2.能否开机:开机后是否从0到9依次显示、数字是否模糊、能否归零; 3.有无背光; 4.用砝码测试能否称重; 5.充电器是否完好,能否使用; 6.配件是否齐全;
第八部分传感器类型: 1.电阻式:价格适中、精度高、使用广泛; 2.电容式:体积小、精度低; 3.磁浮式:特高精度、造价高; 4.油压式:现市场上已淘汰; 显示器种类:1.LCD(液晶显示):免插电、省电、附带背光; 2.LED:免插电、耗电、很亮; 3.灯管:插电、耗电、很高; K/B(按键)类型:1.薄膜按键:触点式; 2.机械按键:由许多单独按键组合在一起; 传感器的特性: 1.额定载荷; 2.输出灵敏度; 3.非线性; 4.滞后; 5.重复性; 6.蠕变; 7.零点输出影响; 8.额定输出温度影响; 9.零点输入; 10.输入阻抗; 11.输出阻抗; 12.绝缘阻抗; 13.容许激励电压;(5-18V)
第九部分传感器损坏后现象:1.称量不准; 2.显示不归零; 3.显示的数字乱跳判断传感器的+E、-E、+S、-S 1.先用电阻档测4条线两两这间的电阻值,共有6组。
如为400-450欧则为+E、-E;如果为350欧,则为+S、-S;为290欧,则为R桥臂; 2.在+E、-E端接上+_5V电压,传感器正确施加一个压力,如输出+_S 增大,则红表笔为+S,反之-S;
第十部分高精度计数秤特点:1.Kg/Ib单位转换功能; 2.零点显示范围、调整功能(GLH系列没有) 3.取样速度调节功能; 4.有10组单重记忆功能; 5.可同时进行重量、数量、累计功能(GLH只有数量累计) 6.可设定重量、数量上限警示功能; 7.自动零点追踪、温度线性校正;。