CART算法
CART算法

这(2)里计输算样入本标集题D的文基字尼系数,如果基尼系数小于阈值,则返回决策树子树,当前节点停止
递归。 (3)计算当前节点现ቤተ መጻሕፍቲ ባይዱ的各个特征的各个特征值对数据集D的基尼系数,对于离散值和连续
值的处理方法和基尼系数的计算见第二节。缺失值的处理方法和C4.5算法里描述的相同。 (4)在计算出来的各个特征的各个特征值对数据集D的基尼系数中,选择基尼系数最小的特
剪枝损失函数表达式:
α为正则化参数(和线性回归的正则化一样),C(Tt)为训练数据的预测误差,|Tt|是子树T叶 子节点数量。
当α = 0时,即没有正则化,原始生成的CART树即为最优子树。当α= ∞时,正则化强 度最大,此时由原始的生成CART树的根节点组成的单节点树为最优子树。当然,这是两种 极端情况,一般来说,α越大,剪枝剪的越厉害,生成的最优子树相比原生决策树就越偏小。 对于固定的α,一定存在使得损失函数Cα(Tt)最小的唯一子树。
CART既能是分类树,又能是 回归树。
如果我们想预测一个人是否 已婚,那么构建的CART将是分类 树,其叶子节点的输出结果为一个 实际的类别,在这个例子里是婚姻 的情况(已婚或者未婚),选择叶 子节点中数量占比最大的类别作为 输出的类别。
如果想预测一个人的年龄, 那么构建的将是回归树,预测用户 的实际年龄,是一个具体的输出值。 怎样得到这个输出值?一般情况下 选择使用中值、平均值或者众数进 行表示。
04 CART树算法的剪枝
剪枝的思路: 对于位于节点t的任意一颗子树Tt,如果没有剪枝,损失函数是:
如果将其剪掉,仅保留根节点,损失函数是:Cα(T)= C(T)+ α 当α= 0或α很小,Cα(Tt) < Cα(T),当α增大到一定程度时 Cα(Tt) = Cα(T) 当α继续增大时不等式反向,即满足下式:
CART算法介绍
基尼系数 Gene coefficient
Part Five 分类树生成算法
05 Part Five 分类树生成ቤተ መጻሕፍቲ ባይዱ法
(1)计算现有特征对该数据集的基尼指数,对 于每一个特征A,可以对样本点A是否为a可 以将数据集D分成数据集D1,D2D1,D2 (2)对于所有的特征A和所有可能的切分点a, 选择基尼指数最小的特征以及相对应的切分 点作为最优特征和最佳切分点。 (3)对最优子树递归调用(1)(2),直到满足停 止条件。 (4)生成CART分类树。
CART算法——分类决策树算法
目录
01CART 02基本思想 03CART树的特点 04回归树的生成 05分类树的生成及算法 06剪枝处理
Part One CART
01 Part One CART
分类回归树模型由Breiman 等人在1984年提出,是应用 广泛的决策树学习方法。 CART同样由特征选择、树的 生成以及剪枝组成,既可以 用于分类也可以用于回归。 同样属于决策树的一种。
04 Part Four 分类树的生成
对于给定的样本集合D,其基尼指数为
其中,Ck是D中属于第k类的样本子集,K是类的个数。 |Ck|和D分别表示子集的个数和样本的个数。 如果样本集合D根据特征A是否取某一可能的值α被分 割成D1和D2,即
所以在特征A的条件下集合D的基尼指数为
其中基尼指数Gini(D)表示集合的不确定性,基尼指 数G(D,A)表示A=a分解后集合的不决定性。基尼指数 越大,样本集合的不确定性越大。
Part Six 剪枝处理
06 Part Six 剪枝处理
剪枝是决策树学习算法中对付过拟合的主要手段。主 要是从已生成的书中剪掉一些子树或者叶子节点,并 将根节点或者父节点作为新的叶子节点,从而简化分 类树模型。
cart回归树
最小二乘回归树生成算法: 1)依次遍历每个特征j,以及该特征的每个取值s,计算每个切分点(j,s)的损失函数, 选择损失函数最小的切分点。
2)使用上步得到的切分点将当前的输入空间划分为两个部分
3)然后将被划分后的两个部分再次计算切分点,依次类推,直到不能继续划分。 4)最后将输入空间划分为M个区域R1,R2,…,RM,生成的决策树为:
例如,当s=1.5时,R1={1},R2={2,3,...,10},c1=5.56,c2=7.50,则
现将s及m(s)的计算结果列表如下:
由上表可知,当x=6.5的时候达到最小值,此时R1={1,2,...,6},R2={7,8,9,10}, c1=6.24,c2=8.9,所以回归树T1(x)为:
三.CART的生成 CART决策树的生成就是递归的构建二叉树,但是针对分类和回归使用的策略是 不一样的,对于回归树,使用的是平方误差最小准则;而对于分类树,使用的是 基尼指数最小化准则。 1.回归树的生成 假设X和Y分别是输入和输出变量,并且Y是连续变量,训练数据集给定,
一个回归树是对应着输入空间(特征空间)的一个划分以及在划分单元上的输 出之,此处假设已将输入空间划分为M个单元R1,R2,R3......Rm,并在每一个单 元Rm上有固定的输出值Cm,那么回归树的模型则可以表示为:
例2:
下面我们将利用上面的数据对年龄进行预测。 首先将j的属性选为职业,则有三种划分情况{“老师”,“学生”}、{“上 班族”}以及{“老师”,“上班族”}、{“学生”},最后一种为{“学生”, “上班族”}、{“老师”} (1)第一种情况R1={“学生”},R2={“老师”,”上班族”}
1 剪枝,形成子树序列
在剪枝,将α从小增大, 产生一系列的区间(ai,ai+1),i=0,1,2......n的最优子树序列{T0,T1......Tn},序 列中的子树是嵌套的,这句的意思是不同α的产生的子树是完整最优子树一 部分。
机器学习--CART算法

yes
fair
yes
>40
no
excellen t
no
m ed iu m
例:属性“student”的Gini指数计算过程如下
属性“student”有yes和no两个属性值:
, =
7
=
−
14
7
7
+
14
14
−
7
+
−
14
−
Gini指数
= ′ = 1 − 2
=1 ′ ≠
=1
反映了从 D 中随机抽取两个样例,其类别标记不一致的概率。
属性 a 的基尼指数:
1
2
, =
1 +
2
∆ = − ,
m ed iu m
no
fair
no
<=30
lo w
yes
fair
yes
>40
m ed iu m
yes
fair
yes
<=30
m ed iu m
yes
excellen t
yes
31…40 m ed iu m
no
excellen t
yes
31…40 h igh
yes
fair
yes
>40
no
excellen t
<=30
h igh
no
fair
no
<=30
cart算法题目
cart算法题目Cart算法,也称为分类和回归树(Classification and Regression Tree),是一种常用的决策树学习方法。
下面是一些关于Cart算法的题目,用于练习和检验自己对Cart算法的理解:1. 基本概念•解释什么是决策树,并给出其优缺点。
◦解释什么是Cart算法,它在哪些场景中应用?2. 构建决策树•使用Cart算法,给出如何根据数据集构建决策树的步骤。
◦当在某个节点上划分不成功时,如何处理?3. 特征选择•解释如何使用Gini指数或基尼不纯度进行特征选择。
◦解释如何使用信息增益或增益率进行特征选择。
4. 剪枝•为什么要对决策树进行剪枝?◦给出决策树剪枝的几种常见方法。
5. 应用场景•Cart算法可以用于分类问题,还可以用于回归问题。
给出一些应用场景。
6. 与其他算法比较•与其他分类算法(如K近邻、支持向量机、朴素贝叶斯)相比,Cart算法的优点和缺点是什么?7. 实战问题•给出一个数据集,使用Cart算法构建决策树,并解释结果。
◦对于一个分类问题,如何使用Cart算法进行预测?8. 优缺点•列出Cart算法的优缺点,并给出改进的方法。
9. 过拟合与欠拟合•Cart算法也可能遇到过拟合和欠拟合问题,解释这两种问题并给出解决方法。
10. 其他注意事项•在使用Cart算法时,还需要注意哪些问题?例如参数选择、特征选择等。
这些题目涵盖了Cart算法的基本概念、构建、应用和一些注意事项。
通过回答这些问题,可以帮助你深入理解Cart算法,并为实际应用打下基础。
cart算法
cart算法
cart算法,全称Classification and Regression Trees,即分类与回归树算法,是一种基于决策树的机器学习算法。
cart算法可以用于分类问题和回归问题。
在分类问题中,cart算法根据特征值将数据集划分为多个子集,并通过选择一个最佳划分特征和划分阈值来构建决策树。
在回归问题中,cart算法根据特征值将数据集划分为多个子集,并通过选择一个最佳划分特征和划分阈值来构建回归树。
cart算法的核心思想是通过递归地选择最佳划分特征和划分阈值来构建决策树。
在每个节点上,通过计算基于当前特征和划分阈值的Gini指数(用于分类问题)或平方误差(用于回归问题)来评估划分的好坏,选择最小的Gini指数或平方误差对应的特征和划分阈值进行划分。
划分后的子集继续递归地进行划分,直到满足停止条件(如节点中的样本数小于预设阈值或达到最大深度为止),然后生成叶子节点并赋予相应的类别标签或回归值。
cart算法具有较好的拟合能力和可解释性,可以处理混合类型的特征和缺失值。
然而,cart算法容易过拟合,需要采取剪枝操作或加入正则化项来降低模型复杂度。
可以通过使用不同的评估标准和剪枝策略来改进cart算法,如基于信息增益、基尼系数、均方差等评估标准和预剪枝、后剪枝等剪枝
策略。
此外,也可以使用集成学习方法(如随机森林、梯度提升树)来进一步提高模型的性能。
决策树cart算法原理详解
决策树CART(Classification and Regression Trees)算法是一种常用的机器学习算法,它的基本原理是根据已有数据的特征属性将样本划分为不同的类别。
CART算法基于“递归二元切分”的方法,通过将数据集逐步分解为两个子集来构建决策树。
在CART中,每个节点都包括一个数据子集和一个分裂规则,每个分裂规则都由一个特征和一个阈值组成,用于将数据子集分裂为两个较小的子集。
CART算法通过递归的方式将数据子集和分裂规则分解为一个二叉树,其中叶节点表示具体的类别,非叶节点表示需要进一步分裂的子集。
CART分类树适用于预测结果为离散型数据的情况,主要是计算每一组特征的Gini系数增益来确定决策树划分的优先规则。
当一列特征有K个类别,第k个类别概率为pk时,其计算Gini系数系数的公式为:对于样本D,如果根据特征A的某个值a,把D分成D1和D2两部分,则在特征A的条件下,Gini系数计算公式为:公式(请在此处输入公式)。
具体例子:属性有3个,分别是有房情况、婚姻状况和年收入,其中有房情况和婚姻状况是离散的取值,而年收入是连续的取值。
首先对数据集非类标号属性(是否有房、婚姻状况、年收入)分别计算它们的Gini系数增益,取Gini系数增益值最大的属性作为决策树的根节点属性。
以上内容仅供参考,如需更专业的解释,建议咨询数学或计算机专业人士或查阅相关书籍文献。
大数据经典算法CART讲解
大数据经典算法CART讲解CART(分类与回归树)是一种经典的机器学习算法,用于解决分类和回归问题。
它是由Leo Breiman等人在1984年提出的,是决策树算法的一种改进和扩展。
CART算法的核心思想是通过将输入空间划分为多个区域来构建一棵二叉树,每个区域用于表示一个决策规则。
CART算法的整个过程可以分为两个部分:生成和剪枝。
在生成阶段,CART算法通过递归地将数据集切分为两个子集,直到满足一些停止条件。
在剪枝阶段,CART算法通过剪枝策略对生成的树进行剪枝,以防止过拟合。
生成阶段中,CART算法的切分准则是基于Gini系数的。
Gini系数衡量了将数据集切分为两个子集后的不纯度,即数据集中样本不属于同一类别的程度。
CART算法通过选择Gini系数最小的切分点来进行切分,使得切分后的两个子集的纯度最高。
剪枝阶段中,CART算法通过损失函数来评估子树的贡献。
损失函数考虑了子树的拟合程度和子树的复杂度,以平衡模型的拟合能力和泛化能力。
剪枝阶段的目标是找到一个最优的剪枝点,使得剪枝后的子树的整体损失最小。
CART算法具有许多优点。
首先,CART算法可以处理多类别问题,不需要进行额外的转换。
其次,CART算法能够处理混合类型的数据,比如同时具有连续型和离散型特征的数据。
此外,CART算法能够处理缺失数据,并能够自动选择缺失数据的处理方法。
最后,CART算法生成的模型具有很好的可解释性,可以直观地理解决策过程。
然而,CART算法也存在一些不足之处。
首先,CART算法是一种贪心算法,通过局部最优来构建模型,不能保证全局最优。
其次,CART算法对输入特征的顺序敏感,不同的特征顺序可能会导致不同的模型结果。
此外,CART算法对噪声和异常值很敏感,可能会导致过拟合。
在实际应用中,CART算法广泛应用于分类和回归问题。
在分类问题中,CART算法可以用于构建决策树分类器,对样本进行分类预测。
在回归问题中,CART算法可以用于构建决策树回归器,根据输入特征预测输出值。
大数据经典算法CART_讲解资料
大数据经典算法CART_讲解资料CART算法,即分类与回归树(Classification and Regression Tree)算法,是一种经典的应用于大数据分析的算法。
它将数据集按照特征属性进行划分,然后根据各个特征属性的分割点将数据集划分为多个子集,进而得到一个树形的划分结构。
通过分析划分特征和划分点的选择,CART算法能够高效地解决分类和回归问题。
对于分类问题,CART算法通过衡量不纯度(impurity)来选择划分特征和划分点。
常用的不纯度指标包括基尼指数(Gini index)和信息增益(information gain)。
基尼指数衡量了随机从一个样本集合中抽取两个样本,其中属于不同类别的概率;信息增益则使用熵(entropy)作为不纯度的度量标准。
CART算法会选择使得划分后的子集的纯度提升最大的特征属性和相应的划分点进行划分。
对于回归问题,CART算法通过最小化划分后的子集的方差来选择划分特征和划分点。
在每个内部节点上,CART算法选择使得划分后的子集的方差最小化的特征属性和相应的划分点进行划分。
CART算法的优点在于它能够处理高维数据和有缺失值的数据,具有较强的鲁棒性。
此外,CART算法构建的决策树具有可解释性,能够提供对数据的直观理解。
同时,CART算法还能处理不平衡类别数据和多类别问题。
然而,CART算法也存在一些不足之处。
首先,CART算法是一种局部最优算法,可能会陷入局部最优解而无法达到全局最优解。
其次,CART 算法不适用于处理连续型特征属性,需要对连续特征进行离散化处理。
此外,由于CART算法是自顶向下的贪心算法,因此容易过拟合,需要采用一些剪枝策略进行模型的修剪。
在实际应用中,为了提高CART算法的性能,可以使用集成学习方法如随机森林、梯度提升树等。
这些方法通过构建多个CART模型,并通过集成的方式来提高预测准确率和鲁棒性。
总结起来,CART算法是一种经典的大数据分析算法,适用于解决分类和回归问题。
经典算法CART
经典算法CARTCART(Classification And Regression Trees)是一种经典的算法,用于建立分类和回归树模型。
它是由Leo Breiman在1984年首次提出的,目前被广泛应用于数据挖掘和机器学习领域。
CART算法基于决策树的思想,可以将输入数据集分割成多个小的子集,每个子集代表一个决策树节点。
通过对特征的选择和分割,可以使得每个子集的纯度更高,即同一类别的样本更多。
最终,CART算法会生成一棵满足纯度要求的决策树模型。
CART算法的主要步骤如下:1. 特征选择:CART算法使用其中一种准则来选择最佳的特征。
常用的准则包括基尼指数(Gini index)和信息增益(information gain)。
基尼指数衡量了数据集的不纯度,而信息增益衡量了特征对数据集纯度的贡献程度。
选择具有最大基尼指数或信息增益的特征作为当前节点的划分特征。
2.划分数据集:根据划分特征的取值将数据集分成多个子集。
对于离散特征,每个取值对应一个子集;对于连续特征,可以选择一个划分点将数据集分成两个子集。
3.递归建立子树:对每个子集,重复步骤1和步骤2,递归地建立子树。
直到达到停止条件,例如达到最大深度或纯度要求。
4.剪枝处理:为了避免过拟合,CART算法会对生成的决策树进行剪枝处理。
根据其中一种评估准则,剪去部分子树或合并子树。
CART算法具有一些优点,使得它成为一种经典的算法。
首先,CART算法可以处理离散特征和连续特征,非常灵活。
其次,CART算法生成的决策树易于理解和解释,可以用于预测和决策解释。
此外,CART算法还能处理多分类和回归问题。
然而,CART算法也存在一些限制。
首先,CART算法只能生成二叉树,即每个节点只有两个分支。
这可能会导致决策树过于复杂,需要更多的分支来表示复杂的决策边界。
其次,CART算法在处理高维数据和数据不平衡的情况下可能会遇到困难,需要进行特殊处理。
总结起来,CART算法是一种经典的算法,用于建立分类和回归树模型。
决策树 cart最佳分割点算法
决策树是一种经典的机器学习算法,它通过对数据集进行分割来构建一个预测模型。
在决策树的构建过程中,寻找最佳的分割点是非常重要的一步。
CART(Classification and Regression Trees)是一种常用的决策树算法,它使用基尼系数来确定最佳的分割点。
本文将重点介绍CART最佳分割点算法的原理和实现方法。
1. 基尼系数的定义在CART算法中,基尼系数是衡量数据集纯度的指标。
对于一个包含K个类别的数据集D,其基尼系数的计算公式如下:Gini(D)=1-Σ(p_i)^2其中,p_i 表示类别 i 在数据集 D 中所占的比例。
当数据集完全纯净时,即只包含单一类别的样本时,基尼系数为 0;当数据集的样本均匀分布在各个类别中时,基尼系数最大为 0.5。
2. 基尼指数的计算在决策树的构建过程中,我们希望找到一个最佳的分割点,使得基尼系数最小。
对于一个二分类的问题,我们可以遍历每个特征的取值,对数据集进行分割,并计算基尼系数。
最终选择使得基尼系数最小的特征和分割点作为最佳的分割点。
3. CART最佳分割点算法CART算法使用递归二分来构建决策树,其最佳分割点算法基本流程如下:1. 遍历每个特征的取值,对数据集进行分割;2. 计算每个分割点的基尼系数;3. 选择使得基尼系数最小的特征和分割点作为最佳的分割点;4. 重复以上步骤,直至满足停止条件(如树的最大深度、节点的最小样本数等)。
4. 实现方法在实际应用中,我们可以使用贪心算法来寻找最佳的分割点。
具体实现方法如下:1. 对于每个特征,对其取值进行排序;2. 遍历每个特征的取值,使用一个指针来指示当前的分割点;3. 维护一个变量来存储当前的基尼系数最小值,以及相应的特征和分割点;4. 在遍历过程中,不断更新基尼系数最小值和最佳的特征和分割点;5. 最终得到使得基尼系数最小的特征和分割点作为最佳的分割点。
5. 结语CART最佳分割点算法是决策树构建过程中的关键步骤,通过有效地寻找最佳的分割点,可以构建出具有良好泛化能力的决策树模型。
分类回归树cart的参数
分类回归树cart的参数
分类回归树(CART)是一种常用的决策树算法,用于解决分类
和回归问题。
CART算法的参数包括以下几个方面:
1. 分裂准则,CART算法使用基尼指数或者信息增益来进行特
征的分裂,这是决定树如何生长的重要参数。
基尼指数是一种衡量
数据不纯度的指标,信息增益则是另一种衡量数据纯度提升的指标。
2. 树的最大深度,决定树生长的最大深度是一个重要的参数,
它可以限制树的复杂度,防止过拟合。
3. 叶子节点的最小样本数,这个参数可以控制每个叶子节点的
最小样本数,当一个叶子节点的样本数少于这个阈值时,就不再分裂。
4. 分裂节点的最小样本数,这个参数可以控制一个节点需要包
含的最小样本数才能被分裂,当一个节点的样本数少于这个阈值时,就不再分裂。
5. 类别权重,在处理不平衡数据时,可以通过设置类别权重来
平衡不同类别的样本数量,这也是CART算法的一个重要参数。
总的来说,CART算法的参数包括分裂准则、树的最大深度、叶子节点的最小样本数、分裂节点的最小样本数和类别权重等。
合理地设置这些参数可以提高CART算法的性能,并且防止过拟合。
决策树(CART)
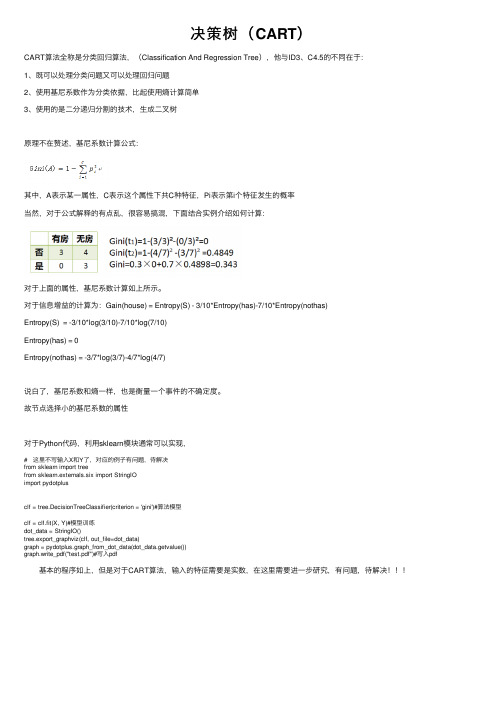
决策树(CART)CART算法全称是分类回归算法,(Classification And Regression Tree),他与ID3、C4.5的不同在于:1、既可以处理分类问题⼜可以处理回归问题2、使⽤基尼系数作为分类依据,⽐起使⽤熵计算简单3、使⽤的是⼆分递归分割的技术,⽣成⼆叉树原理不在赘述,基尼系数计算公式:其中,A表⽰某⼀属性,C表⽰这个属性下共C种特征,Pi表⽰第i个特征发⽣的概率当然,对于公式解释的有点乱,很容易搞混,下⾯结合实例介绍如何计算:对于上⾯的属性,基尼系数计算如上所⽰。
对于信息增益的计算为:Gain(house) = Entropy(S) - 3/10*Entropy(has)-7/10*Entropy(nothas)Entropy(S) = -3/10*log(3/10)-7/10*log(7/10)Entropy(has) = 0Entropy(nothas) = -3/7*log(3/7)-4/7*log(4/7)说⽩了,基尼系数和熵⼀样,也是衡量⼀个事件的不确定度。
故节点选择⼩的基尼系数的属性对于Python代码,利⽤sklearn模块通常可以实现,# 这⾥不写输⼊X和Y了,对应的例⼦有问题,待解决from sklearn import treefrom sklearn.externals.six import StringIOimport pydotplusclf = tree.DecisionTreeClassifier(criterion = 'gini')#算法模型clf = clf.fit(X, Y)#模型训练dot_data = StringIO()tree.export_graphviz(clf, out_file=dot_data)graph = pydotplus.graph_from_dot_data(dot_data.getvalue())graph.write_pdf("test.pdf")#写⼊pdf 基本的程序如上,但是对于CART算法,输⼊的特征需要是实数,在这⾥需要进⼀步研究,有问题,待解决。
简述cart算法
CART算法简述1. 什么是CART算法?CART(Classification and Regression Trees)算法是一种基于决策树的机器学习算法,用于解决分类和回归问题。
它通过构建一棵二叉树来对数据进行划分,每个内部节点表示一个特征,每个叶子节点表示一个类别或者一个数值预测。
2. CART算法的原理CART算法基于递归分割的思想,通过选择最优切分点将数据集切分成两个子集,使得切分后的子集纯度增加(分类问题)或者方差减小(回归问题)。
具体步骤如下:•选择最优特征和最优切分点:遍历所有特征和可能的切分点,计算每个切分点的纯度增益(分类问题)或者方差减少(回归问题),选择纯度增益最大或者方差减少最大的特征和切分点。
•判断停止条件:如果当前节点样本数小于预设阈值,或者当前节点纯度已经达到100%(分类问题)或者方差已经达到最小值(回归问题),则停止继续切分。
•创建子节点:根据选定的特征和切分点将数据集划分成两个子集,分别作为左子树和右子树的数据。
•递归调用:对左子树和右子树分别执行上述步骤,直到满足停止条件。
3. CART算法的优缺点CART算法具有以下优点:•可解释性强:决策树可以直观地表示特征的重要性和判断规则,易于理解和解释。
•非参数化:决策树不对数据分布做任何假设,适用于各种类型的数据。
•对异常值和缺失值不敏感:决策树使用多数投票原则进行分类,对异常值和缺失值不敏感。
然而,CART算法也存在一些缺点:•容易过拟合:由于决策树可以无限切分直到纯度为100%,容易把训练数据中的噪声也当作信息进行学习,导致过拟合问题。
•不稳定性:数据的微小变动可能会导致生成完全不同的决策树。
4. CART算法在分类问题中的应用CART算法在分类问题中通过构建决策树进行预测。
以下是应用CART算法解决分类问题的步骤:1.收集训练数据集,包括特征和标签。
2.选择最优特征和最优切分点,将数据集划分成两个子集。
简述cart算法
CART算法简述1. 引言CART(Classification and Regression Trees)算法是一种常用的决策树算法,它可以用于分类和回归问题。
CART算法通过将数据集分割成不同的子集,构建一棵二叉树来进行预测和决策。
本文将详细介绍CART算法的原理、步骤和应用。
2. 原理CART算法基于二叉树结构,每个非叶节点都有两个子节点,从而形成一个树状结构。
在分类问题中,每个叶节点代表一个类别;在回归问题中,每个叶节点代表一个数值。
CART算法通过递归地选择最佳切分特征和切分点来构建决策树。
具体步骤如下:•首先选择一个特征和切分点,将数据集分割成两个子集。
•计算每个子集的纯度或误差。
•根据纯度或误差选择最佳切分特征和切分点。
•重复上述步骤直到满足停止条件。
3. 步骤3.1 特征选择在CART算法中,特征选择是非常重要的一步。
常用的特征选择指标包括信息增益、基尼系数和均方差等。
信息增益用于分类问题,基尼系数用于分类和回归问题,均方差用于回归问题。
3.2 切分点选择在选择特征后,需要确定切分点。
对于连续特征,可以通过遍历所有可能的切分点,并计算纯度或误差来选择最佳切分点。
对于离散特征,可以遍历所有可能的取值,并计算纯度或误差来选择最佳切分点。
3.3 停止条件CART算法在构建决策树时需要满足一定的停止条件。
常用的停止条件包括:达到最大深度、节点中样本数量小于某个阈值、节点中样本属于同一类别或具有相似的数值等。
3.4 剪枝为了防止过拟合,CART算法通常会进行剪枝操作。
剪枝是指从已经生成的决策树中去掉一些子树,使得整个决策树更加简洁而泛化能力更强。
4. 应用CART算法在实际应用中具有广泛的应用场景,包括但不限于以下几个领域:4.1 金融风控在金融风控领域,CART算法可以用于评估借款人的信用风险。
通过构建决策树,可以根据借款人的个人信息和财务状况来判断其还款能力和违约概率。
4.2 医学诊断在医学诊断领域,CART算法可以用于预测疾病的发生和发展趋势。
CART算法介绍
CART算法介绍CART(Classification and Regression Trees,分类与回归树)算法是一种用于建立决策树模型的机器学习算法。
CART算法由Breiman等人于1984年提出,并在之后的几十年中被广泛应用于分类和回归问题。
CART算法的核心思想是将特征空间划分为矩形区域,并在每个矩形区域内生成一个预测值,以最小化预测值与真实值之间的误差。
在分类问题中,CART算法使用基尼指数(Gini index)作为分割准则,用于衡量分割点的纯度;在回归问题中,CART算法使用平方误差作为分割准则,用于衡量分割点的误差。
具体来说,CART算法的流程如下:1.选择一个特征和一个分割点,将数据集分成两个子集。
2.计算两个子集的纯度或误差。
3.重复步骤1和步骤2,直到达到停止条件(如达到最大深度、子集大小小于一些阈值等)。
4.生成一个决策树,每个非叶节点表示一个特征及其分割点,每个叶节点表示一个预测值。
1.非参数化:决策树不对数据的分布做出任何假设,可以适用于各种不同类型的数据。
2.解释性:生成的决策树可以被直观地解释和理解,可以用于推断和决策。
3.高效性:CART算法的时间复杂度相对较低,可以处理大规模数据集。
4.可处理离散和连续特征:CART算法可以处理离散和连续特征,通过选择最佳分割点来划分数据集。
5.可处理多类别问题:CART算法可以处理多类别分类问题,通过构建多棵决策树进行投票或平均预测。
然而,CART算法也存在一些限制:1.容易过拟合:决策树倾向于过度拟合训练数据,特别是当决策树的深度很大或训练样本数量很少时。
2.不稳定性:CART算法对于数据的微小变化非常敏感,可能会导致生成完全不同的决策树。
3.缺乏连续性:CART算法生成的决策树是分段平面,对于一些连续变量的建模可能不够精确。
为了解决CART算法的一些限制,可以采用以下方法:1. 剪枝(pruning):通过修剪决策树的一些分支来降低过拟合风险,在验证集上选择合适的剪枝策略。
CART算法介绍
CART算法介绍CART(Classification And Regression Trees)算法是一种机器学习算法,主要用于决策树模型的构建。
CART算法通过递归地将数据集分割成多个子集,直到子集中的数据只属于同一类别或满足一些预定义的条件。
CART算法可以用于分类和回归问题。
1.选择一个初始特征作为根节点,并将数据集分成两个子集。
选择初始特征的方法有很多,常见的方法有基尼指数和信息增益。
2.对每个子集,重复步骤1,选择一个最佳特征并将子集分割成更小的子集。
分割策略可以采用相同的方法,即最小化基尼指数或最大化信息增益。
3.递归地重复上述步骤,生成一棵完整的决策树,其中每个叶子节点代表一个类别。
4.进行剪枝操作,可以通过最小化损失函数或使用交叉验证方法来选择最优的决策树。
1.算法简单易懂,实现较为容易。
CART算法将复杂的决策问题简化为“是”和“否”的问题,其结果容易解释和理解。
2.可以处理多类别问题。
CART算法可以应用于多类别分类问题,并且可以通过增加决策树的深度来提高分类的准确性。
3.能够处理非线性特征。
CART算法对非线性特征没有太强的限制,可以处理多种类型的特征。
4.对缺失值和异常值具有较好的鲁棒性。
CART算法对于缺失值和异常值有一定的容忍程度,不会对模型产生太大的影响。
然而,CART算法也存在一些不足之处:1.对于样本噪声比较敏感。
CART算法对于噪声数据比较敏感,噪声数据容易导致树模型产生过拟合的情况。
2.对于类别不平衡的数据集效果不佳。
CART算法对于类别不平衡的数据集容易出现偏倚现象,导致模型效果下降。
3.容易产生过拟合。
CART算法在构建决策树时采用了贪心策略,很容易产生过拟合问题。
为了避免过拟合,可以进行剪枝操作。
总结来说,CART算法是一种强大且灵活的机器学习算法,适用于分类和回归问题。
它具有较好的鲁棒性和解释性,并且能够处理多类别和非线性特征。
然而,CART算法仍然存在一些限制,如对噪声敏感和对类别不平衡的数据处理能力不足。
cart回归树算法例题
CART(Classification and Regression Trees)回归树算法是一种常用的决策树学习方法,可以用于分类和回归问题。
以下是一个简单的CART回归树算法的例子:假设我们有一个数据集,包含两个特征(身高和体重)和一个目标变量(年龄)。
我们的任务是根据给定的身高和体重来预测一个人的年龄。
1. 特征选择:CART算法首先选择一个最优特征进行切分。
在本例中,我们可以选择身高作为最优特征。
2. 切分点选择:对于选择的身高特征,我们需要选择一个最优切分点来划分数据集。
假设最优切分点是1.7米。
3. 划分数据集:根据选择的切分点,我们将数据集划分为两部分:身高小于等于1.7米的数据集和身高大于1.7米的数据集。
4. 递归构建子树:对于每个划分的数据集,我们重复步骤1-3,直到满足停止条件(例如,所有样本都属于同一类别或达到预定的树深度)。
5. 输出决策树:最终得到的决策树就是我们的回归模型。
对于给定的身高和体重,我们可以根据决策树来预测年龄。
下面是一个简单的CART回归树的Python代码示例:```pythonfrom sklearn.tree import DecisionTreeRegressorfrom sklearn.model_selection import train_test_splitfrom sklearn.datasets import make_regressionimport numpy as np# 生成模拟数据X, y = make_regression(n_samples=100, n_features=2, noise=0.1)# 划分数据集X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)# 构建CART回归树模型model = DecisionTreeRegressor(criterion='gini')model.fit(X_train, y_train)# 预测测试集年龄y_pred = model.predict(X_test)# 输出预测结果和真实值print("Predictions:", y_pred)print("Real values:", y_test)```这个例子中,我们使用了scikit-learn库中的DecisionTreeRegressor类来构建CART回归树模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例2
• 一个移动电话套餐调查的例子,数据是对于家庭是否接受 电话套餐的调查。830个样例中有126个 接受同意了,目标 是学会接受的家庭与未接受的区别。
例2
在上述例子中,根据选择同意与否作为根节点构造出树:
实验2
简介
• 有两个步骤: • 1: 递归的划分自变量(分裂 split) • 2: 用验证数据进行剪枝(剪枝 )
回归树的生成
• 假设X与Y分别为输入和输出变量,并且Y是连续 变量,给定训练数据集 D {(x1, y1), (x2, y2 ), , (x N , yN ),}
• 考虑如何生成回归树。 • 一个回归树对应着输入空间的一个划分以及在划
K k 1
pk (1
pk )
1
p K 2
k 1 k
• 对于给定的样本集合D,其基尼指数为:
2
Gini(D) 1
K k 1
Ck D
• Ck 是D中属于第k类的样本子集,K是类的个数。
分类树的生成
• 如果样本集合D根据特征A是否取某一可能值a分 割成D1和D2两个部分,即
D1 {(x, y) D : A(x) a}, D2 D \ D1
4 8
NaN NaN
个数的时候的油耗多少。 4034
8
NaN
4166
8
NaN
3850
8
NaN
3563
8
15
3609
8
14
3353
8
NaN
3761
8
15
…
…
…
例1
分类树的生成
• 基尼指数 • 在分类问题中,假设有K个类,样本点属于第k的
概率为 pk ,则概率分布的基尼指数定义为:
Gini( p)
• Gini指数是介于0-1之间的指数,0代表完全相等, 1代表完全不相等
• 对比计算熵值,Gini计算更快,且能使用平衡相 等的成本来划分, 产生end cut的几率变小(end cut: 分割出一个大一个小的分割),即能达到相 对平衡的分割。
分类树的生成
• 停止条件 • 节点达到完全纯性,即全部完全分类完毕 • 数树的深度达到用户指定的深度,树的层数达到
实验1
• 通过CART算法对样本的特征分量进行分类,目的 是依据特征检验酒的类型。
实验1
• 实验结果
实验2
• 酵母数据集 yeast
实验2
• yeast = • Decision tree for classification • 1 if x3<0.435 then node 2 elseif x3>=0.435 then node 3 else CYT • 2 if x1<0.665 then node 4 elseif x1>=0.665 then node 5 else ME3 • 3 if x4<0.395 then node 6 elseif x4>=0.395 then node 7 else CYT • 4 if x4<0.55 then node 8 elseif x4>=0.55 then node 9 else ME3 • 5 if x2<0.625 then node 10 elseif x2>=0.625 then node 11 else ME1 • 6 if x8<0.315 then node 12 elseif x8>=0.315 then node 13 else CYT • 7 if x2<0.37 then node 14 elseif x2>=0.37 then node 15 else MIT • 8 if x1<0.555 then node 16 elseif x1>=0.555 then node 17 else ME3 • 9 class = MIT • 10 if x2<0.575 then node 18 elseif x2>=0.575 then node 19 else ME2 • 11 if x8<0.235 then node 20 elseif x8>=0.235 then node 21 else ME1 • 12 if x1<0.735 then node 22 elseif x1>=0.735 then node 23 else CYT • 13 if x1<0.685 then node 24 elseif x1>=0.685 then node 25 else NUC • 14 if x8<0.52 then node 26 elseif x8>=0.52 then node 27 else CYT • 15 if x2<0.495 then node 28 elseif x2>=0.495 then node 29 else MIT •…
• 则在特征A的条件下,集合D的基尼指数定义为
Gini(D, A)
D1 D
Gini(D1)
D2 D
Gini(D2 ).
• 基尼指数Gini(D)表示集合D的不确定性,基尼指数 Gini(D,A)表示经A=a分割后集合D的不确定性。
分类树的生成
• 基尼指数值越大,样本集合的不确定性也就越大, 与熵相似
同意为1,未同意为0
例2
对于上述例子的根节点,计算分裂规则:
根节点Gini指标值为
即 0.00703
计算剩余属性的Gini指标值(表中为排名前5的属性)为:
则子节点选择增益最高的两个属性: TELEBILC 和 USERPRICE
CART剪枝
• CART采用的是后剪枝方法:根据一定方法,自下 而上剪枝。
xiRm
• 用平方误差最小准则求解每个单元上的最优输出 值。
• 易知,单元 RM 上的 cM 的最优值 cM 是 RM 上的所 有输出实例 xi 对应的输出 yi 的均值,即
cm average{yi : xi Rm}
回归树的生成
• 如何对输入空间进行划分? • 采用启发式方法。
wight cylinders
• 当α=0时候,整体树是最优的。 • 可以用递归的方式对树进行剪枝。
例一
对于例一,可以得到在CART模型下的完整的Tree sequence如下:
有40个节点的树有最小的训 练成本即训练误分率,这 是表现最好的树,但是在 标准误差内,节点35个的树 是最小的树
实验1
• 问题描述:wine的数据来自于UCI数据库,记录的 是在意大利同一区域上三种不同品种的葡萄酒的 化学成分,数据里有178个样本,每个样本含有13 个特征分量(化学成分),每个样本的类标签已 给。
MPG
例1
3504
8
18
3693
8
15
3436
8
18
• 给出了100组汽车数据, 3433
8
16
特征包括:重量,气缸
3449 4341
8 8
17 15
个数,目标为油耗 (MPG miles per43548 Nhomakorabea14
4312
8
14
4425
8
14
gallon)。我们想预测
3850
8
15
给定的汽车重量和气缸
3090 4142
• 在剪枝中,计算子树的损失函数:
• T是任意子树,C(T)为对训练数据的预测误差(如 基尼指数),|T|为子树的叶节点个数,α>=0为参 数。参数α权衡训练数据的拟合程度与模型的复杂 度。
• 对固定的α,一定存在使得损失函数最小的子树, 将其表示为Tα(易验证这样的最优子树是唯一 的)。
• 当α大的时候,最优子树偏小;当α小的时候,最 优子树就偏大。
分的单元上的输出值。假设已将输入空间划分为 M个单元 R1, R2, , RM ,并且在每个单元 RM 上都有固 定的输出值 CM ,于是回归树模型可以表示为
M
f (x) CmIRm (x).
m1
回归树的生成
• 当输入空间的划分确定时,可以用平方误差准则 来表示回归树对训练数据的预测误差 ( yi f(xi))2
CART算法 分类与回归树
简介
• 1984年,Leo Breiman 提出了分类回归树(CART)的 思想。
• 分类与回归树是一种产生二叉决策树的方法。 • 决策树是一种基本的分类方法,首先对数据进行处理,
利用归纳方法生成可读的规则和决策树,然后用其对 数据进行分析。 • 如果目标变量是标称的,且具有两个以上的类别, CART会考虑将目标类别合成成两个超类别(双 化)。 ——分类树 • 如果目标变量是连续的,CART将会找出一组基于树 的回归方程来预测目标变量。 ——回归树