步进电机和驱动器知识雷赛科技培训课件
步进电机及驱动器原理知识【知识讲解】课件

步进电机在医疗设备领域的应用逐渐增多,如手 术机器人、诊断设备和康复设备等。
智能家居
步进电机在智能家居领域的应用也日益广泛,如 智能门锁、智能窗帘和智能照明等。
无人机和机器人
步进电机在无人机和机器人领域的应用也取得了 重要进展,如飞行控制系统和机械臂等。
对未来发展的展望
1 2 3
创新驱动 未来步进电机的技术发展将更加依赖于创新驱动, 包括新材料、新工艺和新技术的应用。
在机器人领域的应用
关节驱动
步进电机常用于机器人的 关节驱动,实现机器人的 各种复杂动作和姿态。
移动机构
步进电机可以驱动机器人 的移动机构,实现机器人 在各种地形和环境中的稳 定行走。
操控手部
步进电机可以用于机器人 的手部操作,实现抓取、 搬运和操作等动作的精确 控制。
在其他领域的应用
医疗器械
航空航天
查并紧固相关部件。
过热或冒烟
可能是由于电机过载、电源电 压过高或驱动器故障,需要检 查电机负载、电源电压和驱动 器状态。
噪声或异响
可能是由于轴承磨损、齿轮损 坏或其他机械故障,需要检查 并更换相关部件。
不通电或无响应
可能是由于电源故障、接线不 良或驱动器故障,需要检查电
源、接线和驱动器状态。
05
步进电机发展趋势
驱动器的选择
根据电机类型选择
不同类型的步进电机需要选择相 应的驱动器,例如直流步进电机 需要选择直流步进电机驱动器, 交流步进电机需要选择交流步进
电机驱动器。
根据控制系统选择
不同的控制系统需要选择相应的 驱动器,例如PLC控制系统需要 选择与PLC控制系统兼容的驱动
器。
根据性能要求选择
步进电机驱动器PPT课件

-
26
3相6拍——两转子齿
-
27
3相6拍——两转子齿
-
28
3相单3拍——两转子齿和四转子齿
-
29
步距角
-
30
细分驱动
细分驱动:细分步进驱动是将全 步进驱动时的步距角个相的电流 以阶梯状n步逐渐增加,使吸引 转子的力慢慢改变,每次转子在 该力的平衡点静止,全步距角作 n个细分,可使转子的运转效果 光滑。
-
35
5、单极与双极驱动
-
36
5、单极驱动与双极驱动
单极性方式:
磁极上绕有两个线圈组成双 线圈,一个线圈直流通电产 生的极性,与另一个线圈直 流通电产生的极性相反,此 为单极性方式。
双极性方式:
激磁定子磁极的线圈为单线 圈绕组,磁极正反切换,则 电流需要正反向流
(a)单极与双极绕组
-
37
步进电机驱动
(b)单极与双极电路与电压波形
-
38
6、步进电机驱动器的使用方法
-
39
6.1、驱动器产品接线方式
共阴极接线 共阳极接线 差分方式接线法
-
40
6.2、电路图
共阳极接线
共阴极接线
-
41
6.2、电路图
差分接线
-
42
6.2、电机的接线
-
43
6.3、电路图
-
44
6.4、实物图(57步进电机+6560v4驱动器+步进电机控制器)
-
15
3.1.3、步进电机的驱动电源
(a)单一电压型驱动电源
-
16
3.1.3、步进电机的驱动电源
(b)高、低压切换型驱动电源
雷赛步进电机资料
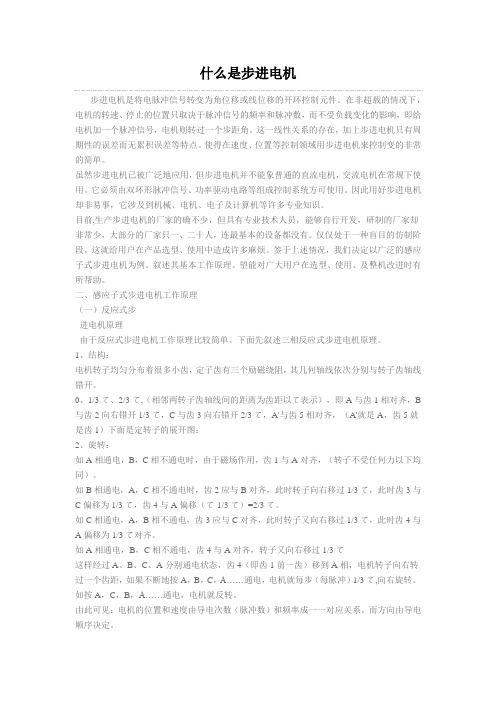
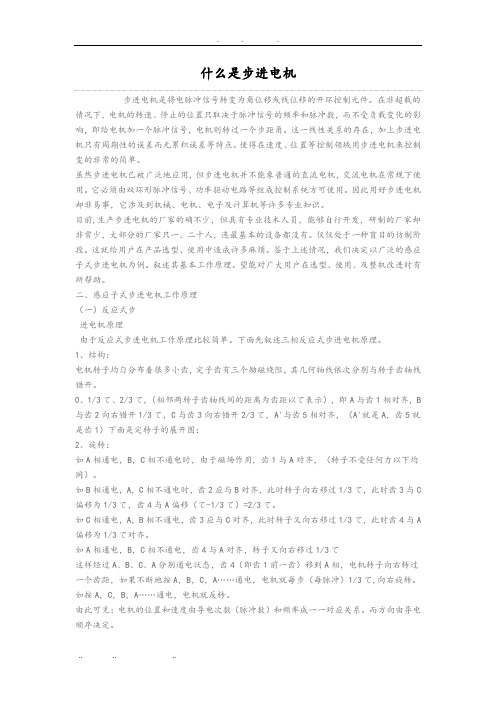
什么是步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
雷赛科技 HA860步进电机驱动器 使用说明
上海分公司 地 址:上海市淞江区九亭镇九新公路
76 号嘉和阳光大厦 9 楼 电 话:021-37829639 传 真:021-37829680
北京办事处 地 址:北京市朝阳区北苑路 13 号院领地
office1 号楼 A 单元 606 号 电 话:010-52086876 传 真:010-52086875
雷赛产品保修条款........................................................................................................................... 14
1 2
电话:0755-26433338(20 线)
MA860H 两相步进驱动器
使用说明书
版权所有 不得翻印
【使 用 前 请 仔 细 阅 读 本 手 册,以 免 损 坏 驱 动 器】
深圳市雷赛智能控制股份有限公司 地 址:深圳市南山区登良路 25 号天安南油工业区二座三楼 邮 编:518052 电 话:400-885-5521 传 真:0755-26402718 Email:info@ 网 址:
1. 电气指标........................................................................................................................................ 2
2. 使用环境及参数............................................................................................................................ 3
雷赛步进电机及驱动器讲座

m:细分数(整步为1,半步为2)
电机绕组电流波形分析
5. 步进电动机的闭环伺服控制
步进电动机矢量控制位置伺服系统框图
系统硬件结构原理图
6、导通和截止时的电机绕组电流和电压的关系
当T导通时有:
di1 U Ri1 L E dt
当T截止时有:
di2 0 i2 L E dt
7. 电压和电流与转速、转矩的关系
步进电动机微步驱动电路基本结构框图
步距角:控制系统每发一个步进脉冲信号,电机所转动的角度。 电机固有步距角 所用驱动器类型及工作状态 0.9°/1.8° 驱动器工作在半步状态 电机运行时的真正步距角 0.9°
0.9°/1.8°
0.9°/1.8° 0.9°/1.8° 0.9°/1.8°
驱动器工作在5细分状态
四、计算例题(直线运动)
已知:直线平台水平往复运动,最大行程L=400 mm,同步带 传动;往复运动周期为T = 4s;重复定位误差 0.05 mm; 平台运动质量M = 10 kg,无外力。 求:电机型号、同步带轮直径、最大细分数。
1. 运动学计算
平台结构简图
平均速度为: V 0.4 / 2 0.2 m / s 设加速时间为0.1 S;(步进电机一般取加速时间为:0.1~1秒) (伺服电机一般取加速时间为:0.05~0.5秒) 则加减速时间共为0.2 S,且加减速过程的平均速度为最大速度的一 半。
电动机构造图
转轴成平行方向的断面图
6. 步进电动机主要参数 ① 步进电机的相数:是指电机内部的线圈组数,目前常用的有 两相、三相、五相步进电机。
② 拍数:完成一个磁场周期性变化所需脉冲数或导电状态,用m
表示,或指电机转过一个齿距角所需脉冲数。 ③ 保持转矩:是指步进电机通电但没有转动时,定子锁住转子 的力矩。 ④ 步距角:对应一个脉冲信号,电机转子转过的角位移。 ⑤ 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩。 ⑥ 失步:电机运转时运转的步数,不等于理论上的步数。 ⑦ 失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在 失调角,由失调角产生的误差,采用细分驱动是不能解决的。 ⑧ 运行矩频特性:电机在某种测试条件下测得运行中输出力矩与 频率关系的曲线 。
步进电机型号、参数、选择

一、步进电动机简介
1. 步进电动机的历史 2. 步进电动机的定义
3. 4. 5. 6. 7.
步进电动机的工作原理 步进电动机的机座号 步进电动机构造 步进电动机主要参数 步进电动机的特点
一、步进电动机简介
1. 步进电动机的历史:德国百格拉公司于1973年发明了五相混 合式步进电机及其驱动器;1993年又推出了性能更加优越的三相 混合式步进电机。我国在80年代以前,一直是反应式步进电机占 统治地位,混合式步进电机是80年代后期才开始发展。 2. 步进电动机的定义:是一种专门用于速度和位置精确控制的 特种电机,它旋转是以固定的角度(称为步距角)一步一步运行 的,故称步进电机。 3. 步进电动机的工作原理 以单极性电机为例来解释 工作原理
4. 步进电动机的机座号:主要有35、39、42、57、86、110等 5. 步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠 轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相 混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿; 三相电机的定子有9个大齿,45个小齿,转子有50个小齿。
2. 电机定位精度的选择
机械传动比确定后,可根据控制系统的定位精度选择步进电机 的步距角及驱动器的细分等级。一般选电机的一个步距角对应 于系统定位精度的1/2 或更小。 注意:当细分等级大于1/4后,步距角的精度不能保证。 伺服电机编码器的分辨率选择:分辨率要比定位精度高一个数量 级。
3. 电机力矩选择 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静 力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯 性负载和摩擦负载二种。直接起动时(一般由低速)时二种负 载均要考虑,加速起动时主要考虑惯性负载,恒速运行进只要 考虑摩擦负载。一般情况下,静力矩应为摩擦负载的2-3倍内好, 静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) • 转动惯量计算
第25次课步进电机及其驱动器基础知识
5
第25次课步进电机及其驱动器基础知识
合作愉快,共赢美好未来
6
第25次课步进电机及其驱动器基础知识
2、步进电机驱动器
2.1 步进电机工作原理 2.2 步进电机驱动电路 2.3 步进电机型号选择 2.4 步进电机驱动器
2.4.1 步进电机驱动器的型号选择 2.4.2 步进电机驱动器基本使用
7
第25次课步进电机及其驱动器基础知识
2.1步进电机#39;
42
C 3B A'
A
B'
C'
C
B
A'
A相通电,转子1、
3齿与A、A' 对齐。
A、B相同时通电,A、 A' 磁极拉住1、3齿,B、 B' 磁极拉住2、4齿,转
子转过15,到达左图所 示位置。
16
第25次课步进电机及其驱动器基础知识
2.1步进电机工作原理
A
B'
C'
C
B
A'
A
B'
C'
C
B
A'
B 相通电,转子2、
4齿与B、B´ 对齐,又转
过15。
B、C相同时通电,
C' 、C 磁极拉住1、3 齿,B、B' 磁极拉住
2、4齿,转子再转过 15。
17
第25次课步进电机及其驱动器基础知识
2.1步进电机工作原理
三相反应式步进电动机的一个通电循环周 期如下:AAB B BC C CA,每个循 环周期分为六拍。每拍转子转过15(步距角), 一个通电循环周期(6拍)转子转过90 (齿距角)。
12
第25次课步进电机及其驱动器基础知识
雷赛步进电机控制祥细资料全
什么是步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C 偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A 偏移为1/3て对齐。
步进电机和驱动器知识雷赛科技培训课件

10. 免低频共振及降低运行噪声
步进电动机微步驱动电路基本结构框图
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
步距角:控制系统每发一个步进脉冲信号,电机所转动的角度。
电机固有步距角 所用驱动器类型及工作状态
0.9°/1.8° 驱动器工作在半步状态
5. 微步驱动技术是一种电流波形控制技术。其基本思想是控制每 相绕
6. 组电流的波形,使其阶梯上升或下降,即在0和最大值之间给 出多
7. 个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定 的中
8. 间状态,对应于电机转子旋转的步数增多、步距角减小。采用 细分
9. 驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动, 避
电流PWM细分驱动电路示意图
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
2. 单极性驱动 处,请联系网站或本人删除。
单极性驱动原理图
3. 双极性驱动
双极性驱动原理图
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
4. 微步驱动
处,请联系网站或本人删除。
起步速度一般在100~300RPM。根据电机大小和负载情况而
定,大电机一般对应较低的起步速度。
⑤ 低频振动特性:步进电动机以连续的步距状态边移动边重复
⑥ 运转。其步距状态的移动会产生1 步距响应。
1 步距响应图
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 电机驱动电压越高,电机处电,流请越联大系,网负站载或越本轻人,删电除机。体积越小,
0.9°/1.8° 0.9°/1.8°
驱动器工作在5细分状态 驱动器工作在10细分状态
雷赛步进电机控制祥细资料全
什么是步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给用户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B 与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C 偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A 偏移为1/3て对齐。
步进电机及其驱动系统产品技术培训
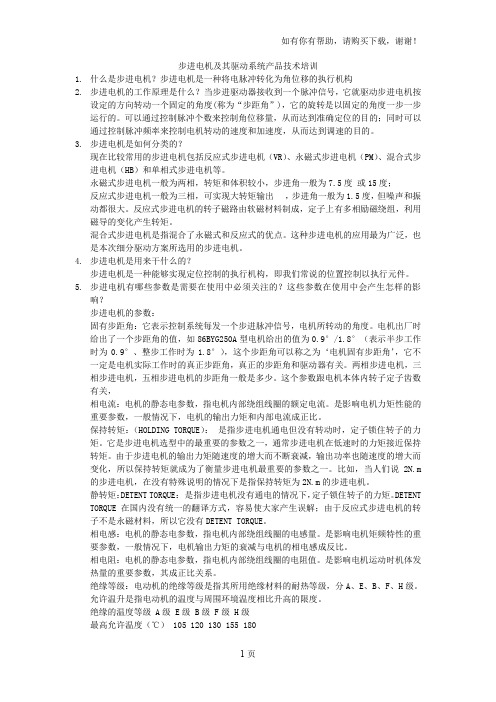
步进电机及其驱动系统产品技术培训1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构2.步进电机的工作原理是什么?当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
3.步进电机是如何分类的?现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
混合式步进电机是指混合了永磁式和反应式的优点。
这种步进电机的应用最为广泛,也是本次细分驱动方案所选用的步进电机。
4.步进电机是用来干什么的?步进电机是一种能够实现定位控制的执行机构,即我们常说的位置控制以执行元件。
5.步进电机有哪些参数是需要在使用中必须关注的?这些参数在使用中会产生怎样的影响?步进电机的参数:固有步距角:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
两相步进电机,三相步进电机,五相步进电机的步距角一般是多少。
这个参数跟电机本体内转子定子齿数有关,相电流:电机的静态电参数,指电机内部绕组线圈的额定电流。
是影响电机力矩性能的重要参数,一般情况下,电机的输出力矩和内部电流成正比。
步进电机及驱动器知识共67页文档
1
0
、
倚
南
窗
以
寄
傲
,
审
容
膝
之
易
安
。
谢谢你的阅读
❖ 知识就是财富 ❖ 丰富你的人生
71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外相应,言行相称。——韩非
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。
步进电机及驱动器知识
6
、
露
凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
以单极性电机为例来解释 工作原理
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 处,请联系网站或本人删除。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
二、步进驱动器简处介,请联系网站或本人删除。
步进驱动器:是一种能使步进电机运转的功率放大器,能把控制器 发来的脉冲信号转化为步进电机的角位移,电机的转速与脉冲频率 成正比,所以控制脉冲频率可以精确调速,控制脉冲数就可以精确 定位。
⑥ 中高频稳定性
电机的固有频率估算值:
f0
1
2
ZrTk J
式中:Zr为转子齿数;Tk为电机负载转矩;J为转子转动贯量
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
二、步进驱动器简处,介请联系网站或本人删除。
1. 恒流驱动 2. 单极性驱动 3. 双极性驱动 4. 微步驱动 5. 步进电动机的闭环伺服控制 6. 导通和截止时的电机绕组电流和电压的关系 7. 电压和电流与转速、转矩的关系
则共振区向上偏移,反之亦然。步进电机低速转动时振动和噪声
大是其固有的缺点,克服两相混合式步进电机在低速运转时的振
动和噪声方法:
a. 通过改变减速比等机械传动避开共振区; b. 采用带有细分功能的驱动器; c. 换成步距角更小的步进电机; d. 选用电感较大的电机 e. 换成交流伺服电机,几乎可以完全克服震动和噪声,但成本高; f. 采用小电流、低电压来驱动。 g. 在电机轴上加磁性阻尼器;
电动机构造图
转轴成平行方向的断面图
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 6. 步进电动机主要参数处,请联系网站或本人删除。 ① 步进电机的相数:是指电机内部的线圈组数,目前常用的有 两相、三相、五相步进电机。 ② 拍数:完成一个磁场周期性变化所需脉冲数或导电状态,用m 表示,或指电机转过一个齿距角所需脉冲数。 ③ 保持转矩:是指步进电机通电但没有转动时,定子锁住转子 的力矩。 ④ 步距角:对应一个脉冲信号,电机转子转过的角位移。 ⑤ 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩。 ⑥ 失步:电机运转时运转的步数,不等于理论上的步数。 ⑦ 失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在 失调角,由失调角产生的误差,采用细分驱动是不能解决的。 ⑧ 运行矩频特性:电机在某种测试条件下测得运行中输出力矩与 频率关系的曲线 。
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
主要内容
处,请联系网站或本人删除。
一、步进电动机简介
二、驱动器简介
三、电机选型计算方法
四、计算例题
五、雷赛公司步进驱动器的命名方法
六、雷赛公司驱动器产品线介绍
七、电机接线
八、评判步进系统好坏的依据
九、使用过程中常见问题及原因分析
十、步进驱动系统的常见问题 (FAQ)
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 7. 步进电机的特点 处,请联系网站或本人删除。 ① 一般步进电机的精度为步距角的3-5%,且不累积; ② 步进电机外表允许的最高温度取决于不同电机磁性材料的退磁点; ③ 步进电机的力矩会随转速的升高而下降(U=E+L(di/dt)+I*R)
十一、步进电动机与交流伺服电动机的性能比较
十二、驱动器产品测试对比
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
一、步进电动机简处,介请联系网站或本人删除。
1. 步进电动机的历史 2. 步进电动机的定义 3. 步进电动机的工作原理 4. 步进电动机的机座号 5. 步进电动机构造 6. 步进电动机主要参数 7. 步进电动机的特点
矩频特性曲线
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 ④ 空载启动频率:即步处进,电请机联在系空网载站情或况本下人能删够除正。常启动的脉
⑤ 冲频率,如果脉冲频率高于该值,电机不能正常启动, 可能
⑥ 发生丢步或堵转。
⑦
步进电机的起步速度一般在10~100RPM,伺服电机的
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之
一、步进电动机处简,介请联系网站或本人删除。
1. 步进电动机的历史:德国百格拉公司于1973年发明了五相混 合式步进电机及其驱动器;1993年又推出了性能更加优越的三相 混合式步进电机。我国在80年代以前,一直是反应式步进电机占 统治地位,混合式步进电机是80年代后期才开始发展。 2. 步进电动机的定义:是一种专门用于速度和位置精确控制的 特种电机,它旋转是以固定的角度(称为步距角)一步一步运行 的,故称步进电机。 3. 步进电动机的工作原理
起步速度一般在100~300RPM。根据电机大小和负载情况而
定,大电机一般对应较低的起步速度。
⑤ 低频振动特性:步进电动机以连续的步距状态边移动边重复
⑥ 运转。其步距状态的移动会产生1 步距响应。
1 步不能作为科学依据,请勿模仿;如有不当之 电机驱动电压越高,电机处电,流请越联大系,网负站载或越本轻人,删电除机。体积越小,
本文档所提供的信息仅供参考之用,不能作为科学依据,请勿模仿;如有不当之 4. 步进电动机的机座号处:,主请要联有系35网、站39或、本42人、删57除、。86、110等 5. 步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠 轴承),定子(绕组、定子铁芯),前后端盖等组成。最典型两相 混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿; 三相电机的定子有9个大齿,45个小齿,转子有50个小齿。