第2章DSP控制器总体结构.
DSP工作原理

DSP工作原理一、简介DSP(Digital Signal Processor,数字信号处理器)是一种专门用于数字信号处理的微处理器。
它具有高性能、低功耗和高度可编程的特点,广泛应用于通信、音频、视频、雷达、医疗等领域。
本文将详细介绍DSP的工作原理。
二、DSP的基本组成1. 数据通路(Data Path):数据通路是DSP的核心部份,用于执行算术运算、逻辑运算和数据传输等操作。
数据通路由运算器、寄存器和数据通路控制器组成。
2. 控制器(Controller):控制器用于控制DSP的操作,包括指令的获取、解码和执行等功能。
控制器由指令寄存器、程序计数器和控制单元等组成。
3. 存储器(Memory):存储器用于存储程序代码、数据和中间结果等信息。
存储器包括指令存储器(程序存储器)和数据存储器。
4. 外设接口(I/O Interface):外设接口用于与外部设备进行数据交换,如与传感器、显示器、键盘等设备的连接。
三、DSP的工作流程1. 指令获取阶段:DSP从指令存储器中获取指令,并将其存储到指令寄存器中。
2. 指令解码阶段:DSP解码指令,确定执行的操作类型和操作数。
3. 数据处理阶段:根据指令中的操作类型和操作数,DSP执行算术运算、逻辑运算或者数据传输等操作。
这些操作通常涉及数据的加载、存储、运算和传输。
4. 结果存储阶段:DSP将计算结果存储到数据存储器中,以备后续使用。
5. 控制流程阶段:DSP根据控制指令中的条件判断,决定下一条要执行的指令的地址。
6. 循环处理:DSP可以通过循环指令实现对一段代码的重复执行,实现高效的数据处理。
四、DSP的优势1. 高性能:DSP具有专门优化的指令集和硬件结构,能够快速执行复杂的信号处理算法。
2. 低功耗:DSP采用高度优化的架构和电源管理技术,能够在低功耗下实现高性能的信号处理。
3. 高度可编程:DSP具有灵便的指令集和丰富的外设接口,使其能够适应各种不同的应用需求。
DSP原理及应用第二章DSP的硬件结构总结(精)
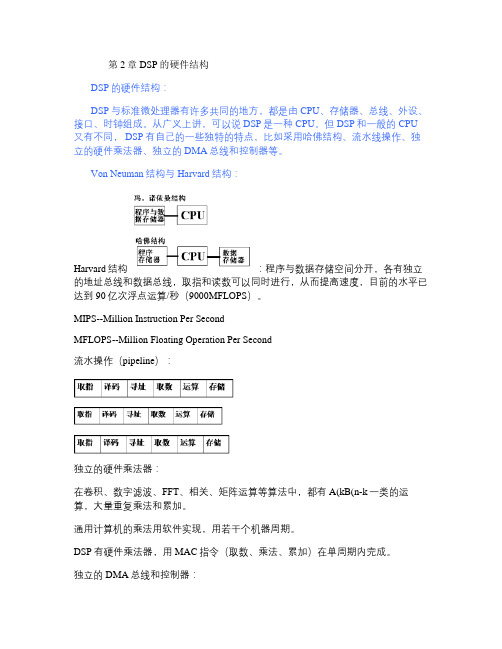
第2章DSP的硬件结构DSP的硬件结构:DSP与标准微处理器有许多共同的地方,都是由CPU、存储器、总线、外设、接口、时钟组成。
从广义上讲,可以说DSP是一种CPU。
但DSP和一般的CPU 又有不同, DSP有自己的一些独特的特点,比如采用哈佛结构、流水线操作、独立的硬件乘法器、独立的DMA总线和控制器等。
Von Neuman结构与Harvard结构:Harvard结构:程序与数据存储空间分开,各有独立的地址总线和数据总线,取指和读数可以同时进行,从而提高速度,目前的水平已达到90亿次浮点运算/秒(9000MFLOPS)。
MIPS--Million Instruction Per SecondMFLOPS--Million Floating Operation Per Second流水操作(pipeline):独立的硬件乘法器:在卷积、数字滤波、FFT、相关、矩阵运算等算法中,都有A(kB(n-k一类的运算,大量重复乘法和累加。
通用计算机的乘法用软件实现,用若干个机器周期。
DSP有硬件乘法器,用MAC指令(取数、乘法、累加)在单周期内完成。
独立的DMA总线和控制器:有一组或多组独立的DMA总线,与CPU的程序、数据总线并行工作,数据的传递和处理可以独立进行,DMA内部总线与系统总线完全分开,避开了总线使用上的瓶颈。
在不影响CPU工作的条件下,DMA速度已达800Mbyte/s。
CPU:通用微处理器的CPU由ALU和CU组成,其算术运算和逻辑运算通过软件来实现,如加法需要10个机器周期,乘法是一系列的移位和加法,需要数十个机器周期。
DSP的CPU设置硬件乘法器,可以在单周期内完成乘法和累加.移位:通用微处理器的移位,每调用一次移位指令移动1-bitDSP可以在一个机器周期内左移或右移多个bit,可以用来对数字定标,使之放大或缩小,以保证精度和防止溢出;还可以用来作定点数和浮点数之间的转换.溢出:通用CPU中,溢出发生后,设置溢出标志,不带符号位时回绕,带符号位时反相,带来很大的误差DSP把移位输出的最高位(MSB)存放在一个位检测状态寄存器中,检测到MSB=1时,就通知下一次会发生溢出,可以采取措施防止.数据地址发生器(DAG):在通用CPU中,数据地址的产生和数据的处理都由ALU来完成在DSP中,设置了专门的数据地址发生器(实际上是专门的ALU),来产生所需要的数据地址,节省公共ALU的时间.外设(peripherals):时钟发生器(振荡器与PLL)定时器(Timer)软件可编程等待状态发生器通用I/O同步串口(SSP)与异步串口(ASP)JTAG扫描逻辑电路(IEEE 1149.1标准便于对DSP作片上的在线仿真和多DSP条件下的调试’C54x的内部结构:中央处理器CPU 、内部总线控制、特殊功能寄存器、数据存储器RAM 、程序存储器ROM、I/O功能扩展接口、串行口、、主机通信接口HPI、定时系统、中断系统。
第二章 DSP架构与原理
表1.2 单片可编程DSP芯片
公司 AMI NEC TI DSP芯片 S2811 µPD7720 µPD77230 TMS32010 TMS32020 TMS320C25 TMS320C30 TMS320C40 TMS320C50 TMS320C203 TMS320LC549 TMS320C62X MC56001 MC96002 MC56002 DSP32C DSP16A DSP3210 ADSP2101 ADSP21020 推出时间 1978 1980 1985 1982 1987 1989 1989 1992 1990 1996 1996 1997 1986 1990 1991 1988 1988 1992 1990 1991 MAC周期(ns) 300 250 150 390 200 100 60 40 35 12.5 10 5 75 50 50 80 25 60 60 40 定点位数 12/16 16/32 32 16/32 16/32 16/32 24/32 32 16/32 16/32 16/32 16/32 24 32/64 24/48 16或24 16/36 24 16 32 浮点位数
第一代TMS320处理器采用二级流水线, 第二代采用三级流水线, 而第三代则采用四级流水线。
处理器可以并行处理2~6条指令,每条指令 处于流水线上的不同阶段。
三级流水线操作的例子
CLKOUT1
取指 译码 执行
N N-1 N-2
N+1 N N-1
N+2 N+1 N
取指、译码和执行操作可以独立地处理,这可使指 令执行能完全重叠。在每个指令周期内,三个不同的 指令处于激活状态,每个指令处于不同的阶段。
TMS32010 TMS32010-25 TMS32010-14 TMS32011 TMS320C10 TMS320C10-25 TMS320C15 TMS320C15-25 TMS320E15 TMS320C17200 TMS320C17-25 TMS320E17
《DSP内部结构》课件

指令调度:通过指令调度,优化指令顺序,提高流水线的 执行效率
寄存器分配:通过寄存器分配,减少寄存器冲突,提高流 水线的执行效率
内存优化:通过内存优化,减少内存访问次数,提高流水 线的执行效率
并行处理优化
并行处理技术:将任务分解为多个 子任务,同时执行
并行处理技术
并行处理技术是 DSP的核心技术之 一,可以实现多个 任务同时执行
并行处理技术可 以提高DSP的处 理速度和效率, 降低功耗
并行处理技术可 以实现数据的并 行处理,提高数 据处理速度
并行处理技术可 以实现指令的并 行执行,提高指 令执行效率
高速缓存技术
作用:提高DSP的运行速度和效率 原理:将频繁访问的数据存储在高速缓存中,减少对主存的访问次数 特点:速度快、容量小、价格高 应用:在DSP中广泛应用于指令和数据的缓存
数字信号处理单元
算术逻辑单元(ALU):进 行基本的算术和逻辑运算
添加标题
寄存器组(REG):存储数 据和指令
添加标题
指令存储器(ROM):存 储指令
添加标题
输入/输出接口(I/O):与 外部设备进行数据交换
添加标题
添加标题
添加标题
累加器(ACC):存储中间 运算结果
添加标题
程序计数器(PC):指示当 前指令的地址
集成开发环境(IDE)
集成开发环境(IDE)是 DSP编程和开发的重要 工具
常见的IDE包括Keil uVision、IAR Embedded Workbench等
IDE提供了代码编辑、编 译、调试等功能
IDE支持多种编程语言, 如C、C++等
2-DSP的硬件结构

累加器 A
39-32 AG 保护位 39-32 BG 保护位
31-16 AH 高阶位 31-16 BH 高阶位
15-0 AL 低阶位 15-0 BL 低阶位
累加器 B
•累加器分为保护位(AG、BG)、高阶位(AH、BH) 和低阶位(AL、BL)三部分。 •使用STH、STL等指令,可将累加器的内容存放到数 据存储器中。右移时,AG和BG中各数据位分别移至 AH和BH;左移时,AL和BL中各数据分别移至AH和 BH,而AL和BL的低位添0。 •注意:由于移位操作是在移位寄存器中进行,所以操 作后累加器中的内容保持不变。
流水操作(pipeline)
第一条指令取数时,第二条指令译码,第 三条指令取指,依次类推。
取指 译码 取指 取数 译码 取指 执行 取数 译码 取指 执行 取数 译码 执行 取数 执行
流水线操作
在C54x的流水线中,一条指令分为以 下6个阶段: 在T1机器周期内CPU将PC中的内 预取指 容加载到程序地址总线PAB,找到指
都有算术逻辑单元(32bit、40bit) 都有累加器ACC(一个32bit、两个40bit ) 都有乘法器(16×16bit、17×17bit) 都有移位器(乘积定标、桶形) C24x有辅助寄存器及其算术单元ARAU (用来产生数据存储器的地址);C54x有 比较、选择和存储单元CSSU(完成累加 器高低字节间的最大值比较、选择累加器 中较大的字、存储在数据存储器中) C54x还有指数编码器、CPU状态和控制寄 存器
三、专门的硬件乘法器和乘加指令MAC
在数字信号处理的算法中,乘法和累加是 基本的大量运算,占用绝大部分的处理时 间。例如,数字滤波,卷积,相关,向量 和矩阵运算中,有大量的乘和累加运算。 PC机计算乘法需多个周期用软件实现,而 DSP设置了硬件乘法器以及乘加指MAC, 在单周期内取两个操作数一次完成。
《DSP微控制器原理》第二章n
2.2.2、程序控制系统(地址产生逻辑)
程序控制是控制一条或多条指令的执行次序 。其结构如图2.4所示。 NPAR 下一个程序地址寄存器,保存着下一 个指令周期要执行的指令所在的程序地址。 PAR 程序地址寄存器,保存当前程序地址。 PC 16位程序计数器,保存下一条指令代码 所在地址。当程序顺序执行时, PC(NPAR)+1。
这里值得注意的是:TMS320LF240xA系列DSP控制器 分为两组总线(内部总线和外部总线)。上述第一部分模 块均挂接在内部总线上;第二部分模块均挂接在外部总线 上。第三部分是与外部信号连接控制系统运行的模块。
2.1 CPU总线结构与流水线作业的特点 2.1.1、总线结构 TMS320LF240xA控制器对数据的处理速 度快、效率高与其内部总线结构有着密切 的关系。它们均采用的是改进的哈佛总线 结构,具有两套相互独立的程序操作总线 和数据操作总线,共由6组16位的内部地址 和数据总线组成。其结构如图2.1所示。
2.2.3、输入定标移位器
来自程序存储器 (PRDB) 来自数据存储器(DRDB) 16 16
输入定标 部分 MUX 16 31 16 15 输入移位器(32 位) 0
32 送至 CALU 图 2. 6 输入定标移位器结构图
2.2.1、输入定标移位器
从图2.6中可以看出,输入移位器具有两个数据 源。 1、通过DRDB(数据读总线)可输入由指令操作数 所指出的数据存储器单元中的数值; 2、通过PRDB(程序读总线)输入来自指令中给出 的立即数。 当数据写到输入移位器的低16位后,输入移位 器执行由程序指令指定的左移位操作,对该数值进 行调整,然后将调整结果送至CALU的32位输入总 线。
第二章 DSP控制器的CPU功能结构
DSP课件第2章硬件结构

5、电源
采用高性能静态CMOS技术,供电电压为3.3V。 可用IDLE指令进入低功耗模式。
6、在片仿真接口
具有符合IEEEll49.1标准的在片仿真接口(JTAG)。
7、速度
单周期定点指令的执行时间为50ns、35ns或25ns(20MIPS,28.5MIPS, 或40MIPS)。
2.2 TMS320LF240x的总线结构
INTM:中断模式位
用来允许(INTM=0)或禁止(INTM=1)所有的可屏蔽中断。用 SETC OVM或CLRC OVM可将该位置1或清0。LST指令不影响OVM位。
DP:数据页面指针
当使用直接寻址方式时,DP存放存储器的数据页,DP与指令代 码的最低7位构成16位存储器地址。
数据存储器地址
SARAM的地址可以用于数据存储器和程序存储器。可通过软件配置 为外部存储器或内部SARAM。
SARAM在一个机器周期内只能访问一次。当CPU要求多次访问时, SARAM会向CPU提供一个未准备好的信号,然后在每个周期内执行一次 访问。
闪速存储器(Flash) 是电可擦除的、可编程的、可长期保存数据的存储器。
CPU的基本组成包括: 32位中央算术逻辑运算单元(CALU); 32位累加器(ACC);输入与输出数据比例移位器; 16位×16位的乘 法器(MUL)以及乘积比例移位器。
CPU功能结构图
2、输入比例部分
功能:将来自存储器的16位数据左移0~16位送往中央算术逻辑单元 (CALU)。
移位方法:左移后有使用的低位LSB填0,高位MSB填0或用符号 扩展,取决于状态寄存器ST1的符号扩展模式位SXM(D10)。 SXM=0 填0 SXM=1 符号扩展
中央算术逻辑单元
dsp控制器原理与应用的答案
DSP控制器原理与应用的答案1. 简介DSP(Digital Signal Processor)控制器是一种专门用于数字信号处理的微处理器。
它具有高性能、高速度和低功耗的特点,广泛应用于音频、视频、图像处理、通信系统等领域。
本文将介绍DSP控制器的原理和应用。
2. DSP控制器的原理DSP控制器的核心原理是通过数字信号处理算法对信号进行处理。
它包括以下几个主要组成部分:2.1 数据通路数据通路是DSP控制器中最重要的部分。
它由数据寄存器、算术逻辑单元(ALU)、累加器、控制单元等组成。
数据通路通过ALU执行加法、乘法、移位等算术和逻辑运算操作,将处理后的数据保存在数据寄存器中。
2.2 存储器存储器是用于存储数据和程序的部件。
DSP控制器通常包括内部RAM和外部ROM。
内部RAM用于临时存储数据和程序,而外部ROM用于存储固定的程序代码和常量数据。
2.3 控制单元控制单元是DSP控制器中的指令解码器和时序生成器。
它根据程序指令提供的操作码和地址信息,生成相应的控制信号,控制数据通路的工作。
控制单元还负责指令的译码、寻址以及算术和逻辑运算的协调。
3. DSP控制器的应用DSP控制器广泛应用于各个领域的数字信号处理中,包括音频、视频、图像处理和通信系统等。
以下是几个常见的应用场景:3.1 音频处理DSP控制器可以实现音频信号的滤波、变声、混音等处理功能。
例如,在音频设备中,可以使用DSP控制器对声音进行均衡处理,提升音质。
此外,DSP控制器还可以实现音频信号的压缩和解压缩,实现高效的音频编解码。
3.2 视频处理DSP控制器在视频处理中也发挥着重要作用。
它可以实现图像的降噪、边缘增强、色彩校正等功能。
在视频编解码中,DSP控制器可以对视频信号进行压缩和解压缩,实现高清视频的传输和存储。
3.3 图像处理DSP控制器在图像处理领域的应用越来越广泛。
它可以实现图像的增强、去噪、图像识别等功能。
例如,在安防领域,DSP控制器可以对监控视频进行实时的人脸识别和车牌识别。
DSP控制器及原理课堂笔记重点

第一章绪论(大题20分)1-1 DSP的概念与主要特点一.Dsp概念数字信号处理(器)二。
Dsp主要特点(考10分)1,改进的哈佛结构(早期的)冯诺依曼结构:数据和程序空间合二为一,执行过程:串行哈佛结构:程序和数据空间独立分开,执行过程:并行2,流水线技术程序执行过程:取指(令)译码执行(串行或并行:3-8级深度)3,硬件乘法器32位数字运算4,多处理单元辅助算术单元ARAU 产生操作数地址5,特殊DPS指令6,片内存储器和硬件配置硬件模块:GPIO模块7,JTAG标准测接口1-2DSP芯片的发展及应用一,发展二,分类1,按数据格式:定点DSP,浮点DSP2,按用途:通用型DSP,专用型DSP三,DSP的应用(考10分)1,数字信号处理:滤波,FFT,波形产生2,通信:调制解调,扩频通信,传真3,图像处理:图形变换,压缩,动画4,语音处理:语音编码,语音合成,语音识别5,仪器仪表:频谱分析,函数发生,数据采集6,军事:保密通信,全球定位,跟踪导航7,自动控制:引擎控制,自动驾驶,机器人控制,磁盘控制8,医疗:助听,超声设备,诊断工具,病人监护9,家用电器:高保真音响,音乐合成,音调控制,电视,数字电话1-3 TMS 320系列DSP1-4 性能工作电压3.3v(低功耗1.8v)(1分)第二章F2812的总体结构,最小系统及程序开发2-1 F2812总体结构5,时钟与系统控制单元包括:1,时钟与锁相环PLL 2,看门狗3,低功耗模式控制7,外设中断扩展模块PIE9,事件管理器模块EV(考20或15分)10,模数转换器分辨率12位总16路:2个8路A/D11,串口外设{同步串行外设接口(SPI)1个(考10分){异步串行通信接口(SCI)2个增强型的区域网络控制器(ecan)1个多通道缓冲串行接口(mcb-sp)1个12,通用输入/输出接口(GPIO)第五章F2812的控制单元及中断控制5-1 F2812的时钟时钟和系统控制单元的控制和状态寄存器HISPCP高速时钟定标寄存器LOSPCP低速外设时钟定标寄存器PCLKCR外设时钟控制寄存器LPMCR0低功耗模式控制寄存器0LPMCR1低功耗模式控制寄存器1PLLCR锁相环控制寄存器SCSR系统控制与状态寄存器WDCNTR看门狗计数器寄存器WDKEY看门狗复位密钥寄存器WDCR看门狗控制寄存器5-4 F2812的看门狗模块WDCNTR加法8位在工作时定时复位WDKEY 写入0x55h+0xaah Clk=(512Xoscclk)-》再分频WDPS WDCR D2-D0第六章F2812的定时器,GPIO及外部存储器扩展6-1 CPU定时器的结构和原理3个32位的CPU定时器6-2 F2812的GPIO1,GPIO的通用接口模块GPIOA GPIOB GPIOD GPIOE GPIOF GPIOG专用I/O口(16位)GPIO控制寄存器:GPAMUX控制GPIOA功能选择(MUX多路选择)GPAMUX =1专用外设功能=0通用数字I/O口GPADIR GPIOA 的方向控制寄存器=1输出=0输入只有A,B,D,E 4个口的《-GPAQVAL GPIOA的输入信号质量控制寄存器分频用QUAKPRD 寄存器2,数据寄存器(不受EALLOW保护)以A组为例GPADAT GPIOA的数据寄存器GPASET 的设定寄存器置1GPACLEAR 的清除寄存器清零GPATOGGLE 的触发寄存器取反第七章模数转换器(ADC)F2812的12位AD共16路分成2组A,B组每组8路时钟由HISPCLK 做(PLL旁路)可以再分频单次转换频率25MHZ 输入电压0-3V7-1 ADC模块的特点1,12位内置2个采样保持器S/H-A,A组ADCINA0-ADCINA7S/H-B,B组ADCINB0-ADCINB7共有2种采样模式:顺序采样模式,并序采样模式2,有2个排序器SEQ1和SEQ2,用来确定要转换的通道(和个数)SEQ1 8个状态SEQ2 8个状态双排序并序SEQ1,SEQ2串联形成级联16个状态单排序3,ADC采用HISPCLK做为时钟输入,经分频做ADC时钟频率4,ADC排序器有2种工作模式:启动/停止连续模式5,ADC启动:S/W软件启动触发EVA EVB启动触发外部引脚GPIO/XIN T2-ADCSPC6,ADC 具有转换完成中断请求机制每个序列转换完成后向CPU中清中断ADCTRL1 ADC控制寄存器1ADCMAXCONV ADC最大转换通道寄存器ADCCHSELSEQ1 ADC通道选择排序控制器寄存器1ADCASEQSR ADC自动排序状态寄存器ADCRESULT0 ADC结果寄存器0ADCST ADC状态寄存器8-2 通用定时器GPTX (X-1,2,3,4)每个GPTX包括:1,1个可逆计数器(可加可减)2,比较寄存器(带影子寄存器)-TxCMPR 可读写3,周期寄存器TxPR(带影子寄存器)可读写4,控制寄存器TxCON 可读写5,可选择内部或者外部时钟输入6,每个T,包括上溢/下溢中断,周期中断,比较中断通用定时器计数模式:1,停止/保持2,连续增计数模式不对称波形3,定向增/减计数模式6-1 寄存器的C语音访问(10分)SCICCR 串行通讯接口的通讯控制寄存器SCICTLI 串行通讯控制寄存器1SCIHBAUD baud波特SCILBAUDSCIRXBUF BUF缓冲寄存器SCITXBUF TX发送RX接收位域定义Stnllt bs 11定义位域bs #9#事件管理器模块(EV):TI整个2000系列DSP的一个{int a:8; 重要应用是进行电机的控制或者开关电源的控制,Int b:2; 因此事件管理器模块是2000系列DSP最有特色的外Int c:6;}; 设。
DSP控制器课件整理-仅供参考

1.1 中央算术逻辑单元(CALU)和累加器(ACC) 该单元包括(如图 2.6) : (1)32 位多路选择器(MUX)——从输入移位器或乘积移位器中,选择其一送 CALU。 (2)32 位中央算术逻辑单元(CALU)——对累加器和 MUX 的输出进行算术逻辑等运算。如 16 位加、16 位减、布尔逻辑运算、位测试、移位、旋转等。 (3)32 位累加器(ACC)——对来自 CALU 的数据进行移位操作。 (4)32 位输出移位器——对 ACC 输出的高位字或低位字的拷贝进行移位。 其输出最终将通过数据写总线送到数据存储器。
DSP 控制器原理
4)MFLOPS:百万次浮点操作/秒。如浮点加、减、乘、存储等操作。这是浮点 DSP 的重要 指标。手册提供的一般是峰值,设计时要考虑余量。 5)MAC 时间:执行一次乘法和加法运算的时间,大多数 DSP 芯片可以在一个周期内完成。 6)FFT/FIR 执行时间:运行 N 点 FFT(快速傅立叶变换)或 N 点 FIR(有限脉冲响应)运 算的时间。 7)衡量端口传输速度的指标:Mb/s。
DARAM 在一个时钟周期内可以被访问两次, 因此, 它可以在同一时钟的主相写数据, 从相读数据。这充分利用了读写各自的总线并行工作,因此极大地加快了 CPU 的处理速度。 (2)单口 RAM(SARAM) :最多 16K。
SARAM 是单口 RAM, 一个时钟周期可以访问一次。 它可以配置到 16K, 其地址范围从 0800h 处开始, 或位于程序存储器的高端。 它可以被配置成程序存储器、 数据存储器或二者公用。 用做程序存储器时, 可以把程序从片外 ROM 引导到片内 SARAM 中,以提高运行速度。
DSP 控制器原理
DSP原理及应用第二章DSP的硬件结构总结(精)

第2章DSP的硬件结构DSP的硬件结构:DSP与标准微处理器有许多共同的地方,都是由CPU、存储器、总线、外设、接口、时钟组成。
从广义上讲,可以说DSP是一种CPU。
但DSP和一般的CPU 又有不同, DSP有自己的一些独特的特点,比如采用哈佛结构、流水线操作、独立的硬件乘法器、独立的DMA总线和控制器等。
Von Neuman结构与Harvard结构:Harvard结构:程序与数据存储空间分开,各有独立的地址总线和数据总线,取指和读数可以同时进行,从而提高速度,目前的水平已达到90亿次浮点运算/秒(9000MFLOPS)。
MIPS—-Million Instruction Per SecondMFLOPS--Million Floating Operation Per Second流水操作(pipeline):独立的硬件乘法器:在卷积、数字滤波、FFT、相关、矩阵运算等算法中,都有A(kB(n-k一类的运算,大量重复乘法和累加.通用计算机的乘法用软件实现,用若干个机器周期。
DSP有硬件乘法器,用MAC指令(取数、乘法、累加)在单周期内完成。
独立的DMA总线和控制器:有一组或多组独立的DMA总线,与CPU的程序、数据总线并行工作,数据的传递和处理可以独立进行,DMA内部总线与系统总线完全分开,避开了总线使用上的瓶颈。
在不影响CPU工作的条件下,DMA速度已达800Mbyte/s。
CPU:通用微处理器的CPU由ALU和CU组成,其算术运算和逻辑运算通过软件来实现,如加法需要10个机器周期,乘法是一系列的移位和加法,需要数十个机器周期.DSP的CPU设置硬件乘法器,可以在单周期内完成乘法和累加。
移位:通用微处理器的移位,每调用一次移位指令移动1—bitDSP可以在一个机器周期内左移或右移多个bit,可以用来对数字定标,使之放大或缩小,以保证精度和防止溢出;还可以用来作定点数和浮点数之间的转换。
溢出:通用CPU中,溢出发生后,设置溢出标志,不带符号位时回绕,带符号位时反相,带来很大的误差DSP把移位输出的最高位(MSB)存放在一个位检测状态寄存器中,检测到MSB=1时,就通知下一次会发生溢出,可以采取措施防止。
DSP内部结构

9
第9页/共92页
• C54X可访问的存储器空间最大可为 192Kx16-bit(64K程序存储器,64K数 据存储器和64KI/O存储器)
• C548,549,5402,5410等具有扩展寻址方式, 最大可寻址扩展程序空间为8Mx16-bit
• 支持单指令循环和块循环,存储块移动指 令提供了更好的程序和数据管理
10
9 8 —— 0
ST0: ARP TTC C OVVA OVB
DP
DTCOPAC:V:RA:用用1P进数6/:B测来位来用位据:用辅辅试数保来与标存累用来助助/据存保指控志储加来选寄寄存A存令制位器器反L择存存储A中U标。页A映L使器加器器提志/指UBAA用减指的供测。的/针RB单运针地的试0是溢。~操算。址7操否出A位作时R。作产标地7数所的。生志址间产结溢。结接生果出合寻的。形址进成时/借1的个位。
△
△
△
△
EAB
△ △ △
程序 总线 PB
△
△
数据总线
CB
DB
EB
△
△
△
△
△(h △ w) (lw)
△
△
△
△
△
△
△
第17页/共92页
三、C54x芯片的CPU结构
40位算术逻辑运算单元(ALU)
2个40位累加器A和B
包 括
移位-16~31位的桶形移位寄存器 乘法器/加法器单元 比较和选择及存储单元(CSSU)
片内存储器
RAM
ROM
6K
48K
32K
2K
32K
16K
32K
16K
16K
4K
DSP结构
1. 程序地址产生
堆栈:可用于保存地址或数据( PUSH / POP, PSHD/POPD)
1. 程序地址产生
1. 程序地址产生
微堆栈
在执行某些指令前,MSTACK存储返回地址。 这些指令是BLDD、BLPD、MAC、MACD、 TBLR、TBLW。 MSTACK操作对用户是不可见的。
2. 流水线操作
四级流水线 取指令、指令译码、取操作数、指令执 行
3. 转移、调用和返回
无条件:转移—B, BACC;调用—CALL, CALA;返回—RET; 有条件:转移—BCND,BANZ(当前AR内 容不为0);调用—CC;返回—RETC; 多条件判断:使用两个或三个条件; 重复单条指令:RPT—单条指令执行N +1次。
第二章 TMS320LF240x CPU的结构
2.1 2.2 2.3 2.4 2.5
TMS320LF2407A的功能结构 总线结构 CPU的基本结构 状态寄存器ST0和ST1 程序控制
2.1 TMS320LF2407A的功能结构
引脚介绍
事件管理器A:三个捕捉引脚,六个PWM, 两个定时器(T1和T2)比较输出,一个 定时器计数方向,一个定时器外部时钟 输入。 事件管理器B:同上(T3和T4)。 模数转换器ADC:16个模拟量输入引脚, 两个模拟输入参考电压输入引脚,两个 模拟量供电引脚。
组1可选择两个条件 组2可选择三个条件
状态寄存器ST1
C:进位标志位 XF:XF引脚状态位。XF为通用目的输出 引脚,该位决定XF引脚的状态。 PM:乘积移位方式。
DSP硬件结构.ppt
二、流水线
CLK OUT1
取指 译码 执行
N N-1 N-2
N+1 N
N-1
N+2 N+1
N
图、 三级流水线操作
用PC中内容 加载PAB
用PB的内 容加载IR 对IR的内容 译码
读数据1,加载DB 读数据2,加载CB 如果需要,将数据3
写地址加载EAB
P取预指 F取指
用读取 到的指令 加载PB
累加器B
39-32
AG
保护位
31-16
AH
高阶位
15-0
AL
低阶位
累加器A和B的差别仅在于累加器A的31-16位可以用 作乘法器的一个输入
DB15-DB0
40
A
16
CB15-CB0
B
40 B A D C 16
MUX
TC(test bit) ALU
CSSU
Sign control
SXM
Barrel shifter (-16~31)
Legend:
A Accumulator A
B Accumulator B
C
CB data bus
D
DB data bus
T
T register
图、桶形移位器的功能框图
CB15-CB0
DB15-DB0
PB15-PB0 17
T
T
D A P AD C
X MUX
Y MUX
Sign ctr
Sign ctr
第二章 TMS320C45x DSP硬件结构
控制界面
系统控制
PAB PB CAB CB DAB DB EAB EB
乘法器 加法器
第2章DSP控制器总体结构.
Control Ports
McBSP CAN 2.0B SCI-UART A SCI-UART B SPI
Event Managers Ultra-Fast 12-bit ADC 12.5 MSPS throughput Dual sample&holds enable simultaneous sampling Auto Sequencer, up to 16 conversions w/o CPU
7
TI还推出了F2808、F2806、F2801等型号,其内部结 构与F2812类似,但引脚数、时钟频率、内部资源有所降低, 以降低成本。
F28x DSP的硬件资源
8
2.2 DSP的片内硬件资源
F281x DSP的功能框图
9
2812 DSP控制器的结构
• CPU • 片内存储器 • 片内外设 (片内接口电路)
24
Flash存储器的特点
• • • • •
多个分区。 有代码安全保护。 有低功耗模式。 可根据CPU频率调整的等待状态。 可提高性能的流水线模式。
25
Flash和OTP的功耗模式
• Sleep Mode. • Standby Mode. • Active Mode.
26
Flash和OTP的性能
• XINTF (External Interface) 信号: 地址(19位)/数据(16 位)及存储器控制信号引脚。 • JTAG仿真测试及其他(振荡器、复位)引脚。 • A/D转换器引脚。 • 电源引脚。 • GPIOA、GPIOD或( EVA)引脚, GPIO 56个引脚。 • GPIOB 、GPIOD或( EVB事件管理器B)引脚。 • 通信模块(SPI/SCI/CAN/McBSP)或GPIOF、GPIOG引 脚。 • 外部中断或GPIOE 引脚。 • 通用数字I/O GPIOF或XF输出引脚。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Communications Ports
Multiple standard communication ports provide simple interfaces to other components 11
F281x DSP的 功能框图
12
On-Chip Flash Memory
Code security
Watchdog
GPIO
Interrupt Management
150 MIPs C28xTM 32-bit DSP 32x32-bit Multiplier 32-bit Timers (3) Real-Time JTAG 32-bit Register File RMW Atomic ALU
TM
DSP Core)
150MIPS performance Single cycle 32 x32-bit MAC (or dual 16 x16 MAC) Very Fast Interrupt Response Single cycle read-modified-write F24x/LF240x Source Code Compatible
10
TMS320F2812 / TMS320F2810
Most Powerful - Most Integrated Dual Function Digital Signal Controller High-Performance CPU (C28x
Code security
128Kw Flash + 2Kw OTP XINTF 18Kw RAM 4Kw Boot ROM Event Mgr A Event Mgr B
2
2.1 DSP的引脚及其功能
下图分别为TMS320F2812的176引脚PGF LQFP(LowProfile Quad Flatpack)封装图和TMS320F2810的128引脚 PBK LQFP封装图。
3
F2812 DSP的 引脚
4
F2810 DSP的 引脚
5
引脚说明 (见教材表格)
Memory Bus Peripheral Bus
12-Bit ADC
Memory Control Sub-System Peripherals
Fast program execution out of both RAM and Flash memory 100-120 MIPS with Flash Acceleration Technology 150 MIPS out of RAM for time-critical 6、F2801等型号,其内部结 构与F2812类似,但引脚数、时钟频率、内部资源有所降低, 以降低成本。
F28x DSP的硬件资源
8
2.2 DSP的片内硬件资源
F281x DSP的功能框图
9
2812 DSP控制器的结构
• CPU • 片内存储器 • 片内外设 (片内接口电路)
128Kw Flash + 2Kw OTP 18Kw RAM 4Kw Boot ROM Event Mgr A Event Mgr B XINTF
Memory Sub-System
Quarter of a Megabyte of on-chip Flash Memory Fast program execution out of both RAM and Flash memory
Control Ports
McBSP CAN 2.0B SCI-UART A SCI-UART B SPI
Event Managers Ultra-Fast 12-bit ADC 12.5 MSPS throughput Dual sample&holds enable simultaneous sampling Auto Sequencer, up to 16 conversions w/o CPU
• XINTF (External Interface) 信号: 地址(19位)/数据(16 位)及存储器控制信号引脚。 • JTAG仿真测试及其他(振荡器、复位)引脚。 • A/D转换器引脚。 • 电源引脚。 • GPIOA、GPIOD或( EVA)引脚, GPIO 56个引脚。 • GPIOB 、GPIOD或( EVB事件管理器B)引脚。 • 通信模块(SPI/SCI/CAN/McBSP)或GPIOF、GPIOG引 脚。 • 外部中断或GPIOE 引脚。 • 通用数字I/O GPIOF或XF输出引脚。
Memory Bus Peripheral Bus
12-Bit ADC Watchdog
Interrupt Management
100-120 MIPS with Flash Acceleration Technology 150 MIPS out of RAM for time-critical code
6
• XINTF 信号: 地址/数据及存储器控制信号引脚 XA[18]~XA[0]: 19根外部地址线。 XD[15]~XD[0]: 16根外部数据线。 XMP/MC :微处理器/微计算机模式选择 。 XHOLD :外部保持请求。 XHOLDA :外部保持应答。 XZCS0AND1 :XINTF 的Zone0和 Zone1选择。 :XINTF 的Zone2选择。 XZCS2 XZCS6AND7 :XINTF 的Zone6和 Zone7选择。 :写使能。 XWE :读使能。 XRD :读/写选通。 XR/ W XREADY :准备好信号 。
第2章 TMS320F281x DSP控制器总体结构
本章内容: 2.1 DSP的引脚及其功能 2.2 DSP的片内硬件资源 2.3 存储器扩展外部接口 2.4 DSP 片内Flash和OTP存储器 2.5 代码安全模块
1
2.6 时钟与低功耗模式 2.7 看门狗定时器 2.8 32位 CPU定时器 2.9 通用输入/输出 2.10 片内外设寄存器 2.11 外设中断扩展