第3章脉冲多普勒雷达
脉冲多普勒雷达matlab
脉冲多普勒雷达matlab脉冲多普勒雷达是一种广泛应用于军事、民用和科学研究领域的雷达系统。
它可以通过测量目标的速度和距离来实现目标检测和跟踪。
而matlab作为一种强大的数学计算软件,可以帮助我们更加高效地进行雷达信号处理和分析。
一、脉冲多普勒雷达的原理脉冲多普勒雷达的工作原理是通过发射一系列短脉冲信号,然后接收反射回来的信号,并通过信号处理来提取目标的速度和距离信息。
其中,多普勒效应是实现速度测量的关键。
当目标相对于雷达运动时,反射回来的信号会发生多普勒频移,通过测量这个频移可以得到目标的速度信息。
二、matlab在脉冲多普勒雷达中的应用matlab作为一种强大的数学计算软件,可以帮助我们更加高效地进行雷达信号处理和分析。
在脉冲多普勒雷达中,matlab可以用于以下方面:1. 信号处理脉冲多普勒雷达接收到的信号通常包含噪声和杂波,需要进行信号处理来提取目标信息。
matlab提供了丰富的信号处理工具箱,可以帮助我们进行滤波、去噪、谱分析等操作,从而提高信号的质量和可靠性。
2. 目标检测和跟踪脉冲多普勒雷达需要对接收到的信号进行目标检测和跟踪。
matlab提供了多种目标检测和跟踪算法,如CFAR、MTI、MUSIC等,可以帮助我们实现自动化目标检测和跟踪。
3. 数据可视化matlab可以帮助我们将雷达接收到的信号进行可视化,以便更好地理解和分析数据。
通过matlab的绘图工具,我们可以绘制出目标的距离-速度图、功率谱密度图等,从而更加直观地了解目标的特征和运动状态。
三、结语脉冲多普勒雷达是一种重要的雷达系统,它在军事、民用和科学研究领域都有广泛的应用。
而matlab作为一种强大的数学计算软件,可以帮助我们更加高效地进行雷达信号处理和分析。
通过matlab的信号处理工具、目标检测和跟踪算法以及数据可视化功能,我们可以更加准确地提取目标信息,从而实现更加精确的目标检测和跟踪。
脉冲多普勒雷达
脉冲多普勒雷达(pulse Doppler Radar)学习笔记1:PD雷达简介PD雷达的广泛定义应为:能实现对雷达信号脉冲串频谱单根谱线滤波(频域滤波),具有对目标进行速度分辨能力的雷达PD雷达是一种利用多普勒效应检测目标信息的脉冲雷达。
通常工作在一组较高的脉冲频率上,并采用主振放大链型的信号源和距离门窄带滤波器链的信号处理器. 它具有较高的速度分辨能力,从而可以更有效的解决抑制极强的地杂波干扰的问题。
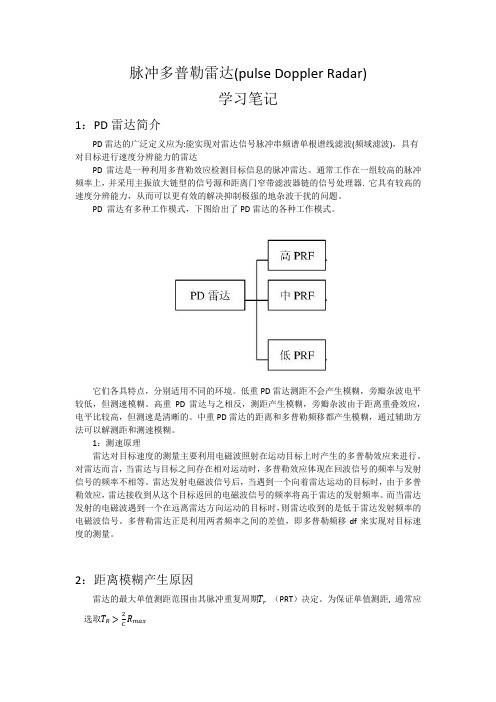
PD 雷达有多种工作模式,下图给出了PD雷达的各种工作模式。
它们各具特点,分别适用不同的环境。
低重PD雷达测距不会产生模糊,旁瓣杂波电平较低,但测速模糊。
高重PD雷达与之相反,测距产生模糊,旁瓣杂波由于距离重叠效应,电平比较高,但测速是清晰的。
中重PD雷达的距离和多普勒频移都产生模糊,通过辅助方法可以解测距和测速模糊。
1:测速原理雷达对目标速度的测量主要利用电磁波照射在运动目标上时产生的多普勒效应来进行。
对雷达而言,当雷达与目标之间存在相对运动时,多普勒效应体现在回波信号的频率与发射信号的频率不相等。
雷达发射电磁波信号后,当遇到一个向着雷达运动的目标时,由于多普勒效应,雷达接收到从这个目标返回的电磁波信号的频率将高于雷达的发射频率。
而当雷达发射的电磁波遇到一个在远离雷达方向运动的目标时,则雷达收到的是低于雷达发射频率的电磁波信号。
多普勒雷达正是利用两者频率之间的差值,即多普勒频移df来实现对目标速度的测量。
2:距离模糊产生原因雷达的最大单值测距范围由其脉冲重复周期T r(PRT)决定。
为保证单值测距, 通常应R max选取T R>2CR max为被测目标的最大作用距离。
有时雷达重复频率的选择不能满足单值测距的要求, 例如在脉冲多普勒雷达或远程雷达, 这时目标回波对应的距离R为R=c2(m×T r+t r)式中,t r为测得的回波信号与发射脉冲间的时延。
这时将产生测距模糊, 为了得到目标的真实距离R, 必须判明式(2.1.7)中的模糊值m。
SQ-雷达系统(第三章)脉冲多普勒雷达

PD雷达的应用
强杂波背景下检测动目标的雷达系统
应用
要求
机载或空间监视
探测距离远;距离数据精确
战场监视(低速目标检测) 中等探测距离;距离和速度数据精确
导弹告警
探测距离近;非常低的虚警率
2
2020/12/8
第三章 脉冲多普勒雷达
3.1 脉冲多普勒(PD)雷达基本概念 3.2 脉冲多普勒雷达的杂波 3.3 PD雷达典型框图与原理 3.4 PD雷达的距离性能
措施:
① 降低天线副瓣 杂波功率谱 提高相对强度
② 提高载机飞行高度 fc max
18
2020/12/8
第三章 脉冲多普勒雷达
3.1 脉冲多普勒(PD)雷达基本概念 3.2 脉冲多普勒雷达的杂波 3.3 PD雷达典型框图与原理 3.4 PD雷达的距离性能
19
2020/12/8
机载PD雷达典型框图与原理
3
2020/12/8
机载PD雷达下视几何关系
天线主瓣
天线旁瓣
机载下视雷达的地面杂波被分为:
主瓣杂波区 -> 天线波束主瓣照射区的地面杂波 旁瓣杂波区 -> 视角范围宽广的天线旁瓣照射的杂波 高度线杂波区 -> 雷达正下方的地面回波
杂波的多普勒频率分布取决于: ① 雷达平台速度(速度和方向) ② 平台相对地面照射点的几何关系
主瓣杂波
主瓣杂波强度:最大
主瓣杂波多普勒中心频率:
fM Bfd(0)2vRcos0
主瓣杂波宽度: fM B fd (0 2 B ) fd (0 2 B ) 2 v RB s in0
8
2020/12/8
旁瓣杂波
旁瓣杂波强度:较大
旁瓣波束与地面的夹角为 ,其多普勒频率为:
脉冲多普勒雷达系统 频段
脉冲多普勒雷达系统频段
脉冲多普勒雷达系统是一种常见的雷达技术,广泛应用于军事和民用领域。
它利用脉冲信号和多普勒效应来实现对目标的探测和跟踪。
在不同的频段下,脉冲多普勒雷达系统具有不同的特点和应用。
在S波段,脉冲多普勒雷达系统具有较高的分辨率和较小的波束宽度,适用于需要高精度探测的场景。
例如,在航空领域,S波段脉冲多普勒雷达系统可以用于飞机的导航和防撞系统,能够精确测量飞机与其他目标的距离和速度,提供可靠的飞行安全保障。
而在X波段,脉冲多普勒雷达系统具有较长的探测距离和较强的透穿能力,适用于对地面目标的探测。
比如,X波段脉冲多普勒雷达系统可以用于地质勘探和环境监测,可以探测到地下水和地表变形等信息,为资源开发和环境保护提供重要参考。
K波段和Ka波段的脉冲多普勒雷达系统具有较高的抗干扰能力和较强的穿透能力,适用于复杂的电磁环境和恶劣的天气条件下的探测任务。
例如,在天气预报和气象监测领域,K波段和Ka波段脉冲多普勒雷达系统可以用于测量降水粒子的速度和方向,实现对降雨量和暴风雨等极端天气的准确预测和警报。
脉冲多普勒雷达系统在不同频段下具有不同的特点和应用。
通过选择合适的频段,可以最大程度地满足不同领域的需求,实现对目标的精确探测和跟踪。
脉冲多普勒雷达系统的发展将进一步推动雷达
技术在军事、民用和科研等领域的广泛应用。
脉冲多普勒雷达的总结

脉冲多普勒雷达的总结1、 适用范围脉冲多普勒(PD )雷达是在动目标显示雷达基础上发展起来的一种新型雷达体制。
这种雷达具有脉冲雷达的距离分辨力和连续波雷达的速度分辨力,有更强的抑制杂波的能力,因而能在较强的杂波背景中分辨出动目标回波。
2、 PD 雷达的定义及其特征(1) 定义:PD 雷达是一种利用多普勒效应检测目标信息的脉冲雷达。
(2) 特征:①具有足够高的脉冲重复频率(简称PRF ),以致不论杂波或所观测到的目标都没有速度模糊。
②能实现对脉冲串频谱单根谱线的多普勒滤波,即频域滤波。
③PRF 很高,通常对所观测的目标产生距离模糊。
3、 PD 雷达的分类图1 PD 雷达的分类图① MTI 雷达(低PRF ):测距清晰,测速模糊 ② PD 雷达(中PRF ):测距模糊,测速模糊,是机载雷达的最佳波形选择 ③ PD 雷达(高PRF ):测距模糊,测速清晰4、 机载下视PD 雷达的杂波谱分析机载下视PD 雷达的地面杂波是由主瓣杂波、旁瓣杂波和高度线杂波所组成的。
表15、PRF的选择(1)高、中、低脉冲重复频率的选择①机载雷达在没有地杂波背景干扰的仰视情况下,通常采用低PRF加脉冲压缩。
②迎面攻击时高PRF优于中PRF。
尾随时,在低空,中PRF优于高PRF ;在高空,高PRF优于中PRF。
③交替使用中、高PRF的方法,或者再加上在下视时采用低PRF的方法,并在低、中PRF时配合采用脉冲压缩技术,将是在所有工作条件下得到远距离探测性能的最有效的方法。
(2)高PRF时重复频率的选择①使迎面目标谱线不落人旁瓣杂波区中:②为了识别迎面和离去的目标:A、当接收机单边带滤波器对主瓣杂波频率固定时:B、当接收机单边带滤波器相对发射频率是固定时:注:单边带滤波器的通带范围应从,单边带滤波器的中心频率是固定的,但偏离应为。
6、PD雷达的信号处理系统PD雷达的信号处理系统主要由单边带滤波器、主瓣杂波抑制滤波器、零多普勒频率抑制滤波器、多普勒滤波器组、检波积累、转换器和门限等部分组成,下面总结各组成部分的特点及其实现方法。
2014脉冲多普勒雷达

中 晰 糊 单 单 低 模 模 复 复 高 中 良 中 良 糊 糊 杂 杂 模 清 复 复 最
高 糊 晰 杂 杂 高 高 优 大 优
清 模 简 简 很 低 差 小 差
4
脉冲多普勒雷达的杂波
研究PD雷达的杂波的重要意义
脉冲多普勒杂波
① PD雷达的基本特点之一:在频域-时域分布相当广 且功率相当强的背景杂波中检测出有用信号。 ② 杂波频谱的形状和强度决定了雷达对具有不同多 普勒频率的目标的检测能力。
脉冲多普勒雷达
本章内容
脉冲多普勒(PD)雷达基本概念 脉冲多普勒雷达的杂波 PD雷达典型框图与原理 PD雷达的距离性能
1
脉冲多普勒雷达基本概念
20世纪60年代,为了解决机载下视雷达强地杂波的干扰, 研制了脉冲多普勒体制雷达,即PD雷达。
脉冲多普勒雷达(Pulse Doppler Radar, PD Radar) 在动目标显示雷达基础上发展的新体制雷达。具 有脉冲雷达的距离分辨力和连续波雷达的速度分 辨力,有更强的抑制杂波的能力,能在较强的杂 波背景中分辨出动目标回波。
脉冲多普勒雷达基本概念
PD雷达的特点
利用多普勒效 应检测目标信 息
具有足够高的脉冲重复频率,没有速度模糊; 能对脉冲串频谱单根谱线作多普勒滤波; 高PRF导致目标距离模糊。
广义定义:
能实现对雷达信号脉冲串频谱单根谱线滤波(频
域滤波),具有对目标的速度分辨能力的雷达。
脉冲多普勒雷达基本概念
2
PD雷达的应用
脉冲多普勒雷达的杂波
9
高度线杂波
机载下视PD雷达地杂波中 f d 0 位置上的杂波 高度线杂波与发射机泄漏相重合,高度线杂波距离雷达最 近,加之垂直反射强。所以在任何时候,在零多普勒频率 位置处总有一个较强的“杂波”。
脉冲多普勒雷达原理
脉冲多普勒雷达原理
脉冲多普勒雷达是一种利用脉冲信号来测量目标距离和速度的雷达系统。
它通过发射脉冲信号并接收目标反射的信号来实现目标的探测和跟踪。
脉冲多普勒雷达具有较高的测速精度和抗干扰能力,因此在军事、民用航空等领域得到了广泛的应用。
脉冲多普勒雷达的工作原理主要包括脉冲信号的发射和接收、目标回波信号的处理以及速度测量等几个方面。
首先,当脉冲多普勒雷达工作时,会发射一系列的脉冲信号。
这些脉冲信号会以一定的重复频率被发射出去,然后在空间中传播。
当这些脉冲信号遇到目标时,会被目标反射回来,形成回波信号。
接着,雷达系统会接收这些回波信号,并进行信号处理。
在信号处理过程中,脉冲多普勒雷达会对接收到的回波信号进行时域和频域的分析。
通过时域分析,可以测量目标与雷达之间的距离,即目标的径向距离。
而通过频域分析,可以测量目标的速度。
这是因为目标的运动会导致回波信号的多普勒频移,通过测量多普勒频移的大小,可以计算出目标的速度信息。
除了距离和速度测量外,脉冲多普勒雷达还可以实现目标的探测和跟踪。
当目标被探测到后,雷达系统会不断地追踪目标,并根据目标的运动状态进行预测。
这样可以实现对目标的持续跟踪,从而满足实际应用中对目标监测的需求。
总的来说,脉冲多普勒雷达是一种能够实现目标距离和速度测量的雷达系统。
它通过发射脉冲信号、接收目标回波信号并进行信号处理,实现了对目标的探测和跟踪。
在实际应用中,脉冲多普勒雷达具有较高的测速精度和抗干扰能力,因此在军事、民用航空等领域有着广泛的应用前景。
脉冲多普勒雷达matlab
脉冲多普勒雷达matlab脉冲多普勒雷达是一种广泛应用于军事、天文、大气科学、气象等领域的电磁波测量技术。
它通过发送一定频率的脉冲信号,并对返回信号进行处理,可以获取目标的信息,如位置、速度、加速度等。
本文将介绍脉冲多普勒雷达的原理和在MATLAB中的实现。
一、脉冲多普勒雷达的原理脉冲多普勒雷达是一种主动雷达,它通过发送脉冲信号,利用目标回波信号的时间差和频率差来测量目标的距离、速度和加速度等信息。
其信号处理过程主要包括以下几个步骤:1. 发送脉冲信号脉冲多普勒雷达发送的脉冲信号通常是一段短时间内的高功率信号,一般情况下可以用正弦函数表示,即:s(t) = A·sin(2πfct)其中,A表示信号的幅度,fc为信号的载频,t为时间。
2. 接收回波信号经过一段时间后,脉冲信号会被目标反射,形成回波信号并被多普勒雷达接收。
多普勒雷达接收到的回波信号会包含有目标的信息,但由于信号在传输过程中会受到一些干扰和衰减,因此需要对信号进行处理,以得到目标信息。
首先,通过信号处理技术可以提取出回波信号中的目标信号,即目标的距离信息。
然后,可以利用多普勒效应来提取目标的速度信息。
多普勒效应是指当观察者和目标相对运动时,目标回波信号的频率会发生变化。
具体来说,当目标朝着多普勒雷达运动时,回波信号的频率高于原始信号的频率;而当目标远离多普勒雷达时,回波信号的频率低于原始信号的频率。
因此,在脉冲多普勒雷达中,可以通过测量回波信号的频率差来计算目标的速度。
对于进行速度测量,一般会采用FFT变换的方法进行频域处理,即把回波信号转换到频域,然后通过计算频率谱来得到目标的速度信息。
频率谱可以使用MATLAB中的fft函数快速计算得到。
4. 计算目标加速度除了可以得到目标的距离和速度信息外,通过对速度信号再次求导,可以得到目标的加速度信息。
因此,可以通过进一步处理速度信号来计算目标的加速度。
在MATLAB中,可以使用diff函数对速度信号进行差分计算,得到相邻速度值之间的差异,再次差分求得目标的加速度。
多普勒雷达

多普勒雷达就是利用多普勒效应进行定位,测速,测距等工作的雷达。
所谓多普勒效应就是,当声音,光和无线电波等振动源与观测者以相对速度V相对运动时,观测者所收到的振动频率与振动源所发出的频率有所不同。
因为这一现象是奥地利科学家多普勒最早发现的,所以称之为多普勒效应.脉冲多普勒雷达是利用多普勒效应制成的雷达。
它的工作原理可表述如下:当雷达发射一固定频率的脉冲波对空扫描时,如遇到活动目标,回波的频率与发射波的频率出现频率差,称为多普勒频率。
根据多普勒频率的大小,可测出目标对雷达的径向相对运动速度;根据发射脉冲和接收的时间差,可以测出目标的距离。
同时用频率过滤方法检测目标的多普勒频率谱线,滤除干扰杂波的谱线,可使雷达从强杂波中分辨出目标信号。
所以脉冲多普勒雷达比普通雷达的抗杂波干扰能力强,能探测出隐蔽在背景中的活动目标。
脉冲多普勒雷达距离方位矩阵

脉冲多普勒雷达距离方位矩阵摘要:1.脉冲多普勒雷达概述2.距离方位矩阵的构建3.距离模糊问题的提出4.新算法解决距离模糊问题5.实验结果与分析6.结论正文:一、脉冲多普勒雷达概述脉冲多普勒雷达是一种利用多普勒效应测量目标距离和速度的雷达系统。
它通过发送短脉冲信号并与接收到的回波进行比较,来检测和测量目标的距离和速度。
由于其高精度和可靠性,脉冲多普勒雷达在军事、航空、航天等领域具有广泛的应用。
二、距离方位矩阵的构建距离方位矩阵是脉冲多普勒雷达系统中的一个重要组成部分,它用于存储雷达接收到的回波信息。
距离方位矩阵由距离通道和方位通道组成,其中距离通道表示目标距离信息,方位通道表示目标方位信息。
通过距离方位矩阵,可以获得目标的距离和方位信息。
三、距离模糊问题的提出在实际应用中,由于雷达系统受到各种因素的影响,例如信号噪声、多径效应等,导致距离方位矩阵中的距离信息出现模糊,无法准确获得目标的距离。
因此,如何解决距离模糊问题成为脉冲多普勒雷达研究的关键之一。
四、新算法解决距离模糊问题为了解决距离模糊问题,研究人员提出了一种新的算法。
该算法通过对距离方位矩阵进行处理,消除噪声和多径效应的影响,从而提高距离信息的准确性。
具体来说,该算法包括以下步骤:1.对距离方位矩阵进行预处理,消除噪声和多径效应的影响;2.计算预处理后的距离方位矩阵的特征矩阵;3.根据特征矩阵,估计目标的距离信息。
五、实验结果与分析为了验证新算法的有效性,研究人员进行了大量实验。
实验结果表明,新算法能够在一定程度上提高距离信息的准确性,降低距离模糊的程度。
在不同的场景和条件下,新算法都表现出较好的性能。
六、结论本文介绍了脉冲多普勒雷达距离方位矩阵的概念,提出了一种解决距离模糊问题的新算法。
实验结果表明,该算法能够有效地提高距离信息的准确性,具有较好的应用前景。
脉冲多普勒雷达
Rm a xVm a x
c
8
λ是雷达波长,c为光速。λ越大,不模糊距离和速度的乘积就越大, 但要增加雷达的体积和成本,还有其他限制,因而是不现实的。
(2)解距离模糊
(a)重频参差解距离模糊
雷 频达率以下重读复出频的率模f糊r1、距f离交不替同工,作可,以如据果此发计生算了出距实离际模距糊离,。在解两距个离重复模 糊有两个限制:
(4)无杂波区
适当选择雷达脉冲重复频率使地面杂波不连续不重叠,形成无杂波 区.在无杂波区域,只有接收机噪声,没有地面杂波,有利于发 现该区域的运动目标.
2.脉冲重复频率的选择
根据技术要求和用途(如要求雷达在无杂波区检测目标还是满足无模糊测速), 也可以根据战术要求选择高,中,低脉冲重复频率段.
结果:
回波
目标 扫描轨迹
回波
扫描角度
图3.8 圆锥扫描示意
扫描角度
βx 波程差l
y
x 图3.9 单脉冲跟踪示意
目标方位βx与波程差l和信号相位差θ的关系:
l x sin x
(3-9)
l 360(度)
( 3-10)
x
arcsin
360 x
( 3-11)
同样可以求得y方向的方位角βy。 在PD雷达中实现单脉冲体制是非常困难的:性能优良的杂波滤波器
f
(c)用fsa1时钟复采样的数字信号延拓频谱
图3.12采样信号频谱延拓与频谱模糊的产生
同样由于目标回波的多普勒频移可能大于若干脉冲重复频率,使测
量到的多普勒频率与实际多普勒频率不一定相等,同一频率读数对
应的目标真实速度有多种可能值的现象叫做测速模糊。未经解模糊 肯定的读数速度叫做模糊速度。
脉冲多普勒法的原理
脉冲多普勒法的原理脉冲多普勒法(Pulse Doppler)是一种用于检测和测量目标速度的雷达技术。
它利用了多普勒效应,即当目标物相对于雷达移动时,它的反射波频率会发生变化。
脉冲多普勒法的原理是基于脉冲雷达的基本原理。
在脉冲雷达中,发射器发出一个短脉冲的电磁波,并且等待反射波返回。
接收器接收到反射波后,通过测量返回时间来计算目标物距离。
而在脉冲多普勒雷达中,除了测量目标物的距离,还能够测量目标物的速度。
当脉冲电磁波与移动的目标相互作用时,反射波的频率会因为多普勒效应而发生变化。
多普勒效应是指当发射源和接收源与移动的物体之间存在相对运动时,接收源接收到的波的频率相对于发射源的频率发生变化。
这种频率变化取决于目标物相对于雷达的速度。
为了解释脉冲多普勒法的原理,我们可以将其分为两个方面来讨论:距离测量和速度测量。
首先,对于距离测量,脉冲多普勒法使用的是时差测量原理。
当发射器发出一个短脉冲的电磁波后,接收器开始等待反射波的返回。
通过测量发射脉冲和接收脉冲之间的时间差,可以计算目标物与雷达的距离。
这是因为电磁波在真空中的传播速度是已知的,因此可以根据时间差和传播速度来计算距离。
其次,对于速度测量,脉冲多普勒法利用多普勒频移原理。
当发射脉冲的雷达与移动的目标进行相互作用时,接收到的反射波的频率会发生变化。
如果目标物朝着雷达运动,接收到的频率比发射频率要高;如果目标物远离雷达运动,接收到的频率比发射频率要低。
通过测量接收到的波的频率变化,可以计算出目标物相对于雷达的速度。
脉冲多普勒法的速度测量原理是通过两个不同的过程实现的。
首先,借助于基频接收器或者混频器,可以将接收到的带有多普勒频率变化的接收信号与发射信号进行混合。
然后,通过信号处理器将混合后的信号进行解析,并提取出多普勒频率成分。
最后,通过反向多普勒变换等算法,可以将多普勒频率转换为目标物相对于雷达的速度。
总结起来,脉冲多普勒法是一种通过利用多普勒效应来测量目标物的速度的雷达技术。
脉冲多普勒雷达原理

脉冲多普勒雷达原理
脉冲多普勒雷达(Pulse-Doppler radar)是一种利用脉冲信号和多普勒效应来测量目标运动状态的雷达系统。
其原理涉及到以下几个关键概念和过程。
首先,雷达系统会发射短暂、高功率的脉冲信号。
这些脉冲信号会沿着发射方向传播,并在探测到目标后被反射回来。
当脉冲信号遇到一个静止的目标时,反射信号的频率与发送频率相同,因为目标对信号的回波没有任何变化。
然而,当目标相对于雷达系统运动时,反射信号的频率会发生变化,这就是多普勒效应。
多普勒效应是由于目标的运动引起的,它会导致回波信号的频率发生变化。
当目标以接近雷达的速度靠近时,回波频率会比发送频率更高;当目标以远离雷达的速度远离时,回波频率会比发送频率更低。
利用多普勒效应,雷达系统可以通过测量回波信号的频率来确定目标的速度。
此外,雷达系统还可以通过比较不同时间内的回波信号来确定目标的位置和运动方向。
脉冲多普勒雷达系统通常使用特殊的信号处理技术来处理接收到的回波信号。
这包括时域滤波和频域分析等方法。
通过这些技术,雷达系统可以提取出目标的速度、距离和方向等关键参数。
总的来说,脉冲多普勒雷达利用脉冲信号和多普勒效应实现对目标运动状态的测量。
通过测量回波信号的频率变化,雷达系统可以确定目标的速度、距离和方向等关键信息。
这使得脉冲多普勒雷达成为了许多应用中非常重要的一种雷达技术。
脉冲多普勒雷达
在机载电子设备方面,苏-27装备了N001ZHUK(朱克)多脉冲多普勒雷达,有同步搜索跟踪、上视上射、下视下射的能力,能同时跟踪10个目标,并自动评估威胁优先级别。
与西方产品相比,功率大,作用距离远(对3平方米反射面的目标,前视距离超过100公里,后视距离达40公里),抗干扰能力强。
另外在风挡前固定安装了OEPS-27光电探测系统(左图及下图),这和美国单独加装光学导航攻击吊舱的做法不同。
该系统镜头部分装在一个风挡前透明的半球体内。
系统包括一红外搜索跟踪系统(IRSTinfra-redsearchandtrack)和一个激光测距仪,探测距离40到100公里。
假如敌机高红外辐射的发动机喷管对着己方,IRST作用距离就远些,反之则近些。
拥有IRST 使得苏-27可以在雷达静默或强电子干扰的情况下保持发现和攻击目标的能力。
目前美军新型的F-16战斗机也开始在风挡前加装IRST装置。
脉冲多普勒雷达测速仿真讲解

任务书雷达进行PD测速主要是利用了目标回波中携带的多普勒信息,在频域实现目标和杂波的分离,它可以把位于特定距离上、具有特定多普勒频移的目标回波检测出来,而把其他的杂波和干扰滤除。
因此要求雷达必须具备很强的抑制杂波的能力,能在较强的杂波背景中分辨出运动目标的回波。
如今,不管是在军用还是民用上,雷达都在发挥着它很早重要的作用,与早期雷达采用距离微分方法测速相比,基于脉冲多普勒理论的雷达测速技术具有实时性好、精度高等优点。
特别是现代相控阵技术在雷达领域的应用,实现了波束的无惯性扫描和工作方式的快速切换,更便于应用脉冲多普勒技术进行雷达测速。
本篇课程设计目的在于介绍脉冲多普勒雷达测速的原理,并对这种技术进行介绍和仿真。
摘要脉冲多普勒(PD)雷达以其卓越的杂波抑制性能受到世人瞩目。
现代飞行器性能的改进和导航手段的加强,使其能在低空和超低空飞行,因此防御低空入侵己成重要问题,由此要求机载雷达,包括预警机雷达和机载火控雷达具有下视能力,即要求能在强的地杂波背景中发现微弱的目标信号,所以现代的预警机雷达和机载火控雷达皆采用PD体制。
脉冲多普勒雷达包含了连续波雷达和脉冲雷达两方面的优点,它具有较高的速度分辨能力,从而可以更有效地解决抑制极强的地杂波干扰问题;此外,脉冲多普勒雷达能够同时敏感地测定距离和速度信息;能够利用多普勒处理技术实现高分辨率的合成孔径图像;而且亦具有良好的抗消极干扰能力和抗积极干扰能力。
本文介绍了脉冲多普勒雷达测速的原理,信号处理。
并用matlab简单的仿真了雷达系统对信号的处理.关键词:脉冲多普勒雷达恒虚警脉冲压缩线性调频AbstactPulse Doppler (PD) radar is famous for it`s outsdanding clutter suppression.Modern aircraft`s function and GPS has been strengthen.now.it makes the aircraft can fly lower and lower.So.nowadays,Defensing.Low altitude invasion has been an important problem.so we require airborne radar. Early warning radar and airborne fire control radar have the ability to look down.That is to say.The radar is be required the ability to find Weak target signal in the strong Groung clutter.So .The modern airborne early warning radar and airborne fire control radar use the PD system.Pulse Doppler (PD) radar concludes two adervantages of Continuous wave radar and impulse radar.It has a higher velocity resolution.thus it can effectively.soveing the problem of strong ground clutter.what`s more.Pulse Dppler (PD) radar can Sensitive text the Distance and speed on the same time.Itcan use Doppler processing technology to realise Synthetic aperture images with high resolution.This article sinply introduced principle of pulse Doppler radar and signaling matlab to simulation The signal processing of radar system.Linear frequency modulation.Keywords:Pulse Doppler (PD) radar.Constant false alarm rate .pulse compression.目录一.脉冲多普雷达简介 (1)1,多普勒效应 (1)二、多普勒测速原理 (2)三、多普勒雷达简介 (4)四、多普勒雷达工作原理 (6)五、PD雷达信号处理仿真 (8)5.1、正交双通道处理 (9)5.2、脉冲压缩 (10)5.3、线性调频信号的脉冲压缩 (12)5.4、巴克码信号的脉冲压缩 (14)5.5、恒虚警处理 (14)5.5.1、单元平均恒虚警处理(CA-CFAR) (16)5.5.2、平均选大恒虚警处理(GO-CFAR) (16)5.6、动目标检测(MTD)模型 (19)六、总结与展望 (20)参考文献 (21)二、脉冲多普雷达简介1,多普勒效应多普勒效应是指当发射源和接收者之间有相对径向运动时,接收到的信号将发生变化。
脉冲多普勒雷达原理

脉冲多普勒雷达原理1 脉冲多普勒雷达概述脉冲多普勒雷达(Pulse-Doppler Radar)是一种应用了多种高科技技术的雷达系统,它可以同时进行目标的探测、跟踪和识别,并且可以在保证高分辨率的前提下提高探测和跟踪的距离,具有和收音机一样广泛的应用领域,比如在军事、民用和航空领域等。
2 脉冲多普勒雷达的原理脉冲多普勒雷达最基本的原理是利用雷达发射器的微波脉冲辐射目标,然后通过检测目标反射回来的回波信号,分析回波信号的时间、相位和频率等特征,以便确定目标的位置、速度、大小和形状等相关量。
在脉冲多普勒雷达系统中,发射器通过周期性地发射一系列短时间、高峰值的微波脉冲信号,这些脉冲信号被称作“雷达脉冲”。
当这些雷达脉冲向目标发射时,它们遇到目标后会被反射回来,这些回波信号会被雷达接收器捕获,然后通过信号处理系统处理,以便获得目标的信息。
基于多普勒效应的原理,当目标在雷达天线的几何轴线方向上运动时,回波信号的频率会发生变化,这种频率变化被称为“多普勒频移”,通过分析多普勒频移,可以计算出目标的速度信息。
此外,脉冲多普勒雷达还可以通过时差测量获得目标的距离信息,通过回波信号的幅度和相位信息来识别目标。
3 脉冲多普勒雷达的应用作为一种高科技应用,在军事和民用领域都有着广泛的应用。
在军事领域,脉冲多普勒雷达可以用于空中和海上的目标监测、导弹制导、防空反导和战术侦察等领域,这些应用都需要雷达系统的高精度、高分辨率、高速度和高可靠性。
在民用领域,脉冲多普勒雷达也得到了广泛应用,比如用于气象、地球物理勘探、空中交通管制、风能利用等领域。
总之,脉冲多普勒雷达是一种高科技应用技术,它的原理基于多种物理原理,既有数据处理技术,也有信号处理技术,应用领域广泛。
它不仅在军事领域有重要的应用价值,也在民用和科研领域中有着广泛的应用前景。
第3章脉冲多普勒雷达

在图3.11中,P3、P4等为发射脉冲,R1、R2、R3等为接收 脉冲。R3是P3脉冲的目标回波。图(a)表示发射脉冲串和接收脉冲 串,图(b)表示回波实际延迟时间,图(c)为显示器直接显示结果。 由图(c)显示结果表示的距离称之为模糊距离。
P3 R1
在PD雷达中,距离跟踪采用距离门和速度联合的方法 (2)四维分辨跟踪系统 对速度、距离、方位角、俯仰角联合跟踪。 (3)多目标跟踪 采用边扫描边跟踪方式。相控阵体制可进行多波束跟踪。
上节课
2.测距和测速模糊的解算
(1)测距和测速模糊的基本概念 为了提高检测性能,PD雷达采用高PRF信号,以便在频域获得 足够宽的无杂波区。发射一个脉冲之后,回波可能隔几个周期才回 来,但接收时不能判断该回波对应于哪一个发射脉冲,于是发生了 测距模糊。读出的目标距离误差是:
§3.1脉冲多普勒雷达的基本概念
脉冲多普勒雷达简称PD雷达,特点: 具有脉冲雷达的距离分辨能力 具有连续波雷达的速度分辨率 有强的杂波抑制能力
1.PD雷达的定义 雷达的定义 20世纪70年代初的定义 (1)具有足够高的PRF,使观测范围内的目标、杂波时 均没有速度模糊。 (2)能对脉冲串频谱单根谱线滤波。 (3)对观测目标的距离有一定的模糊。 上世纪70年代中期,制造出中重频PD雷达,既有距离 模糊又有速度模糊。而将原来的定义称为高重频PD雷达。 最后,不管雷达的重复频率,只要满足上述定义第二条, 就可称为PD雷达,是一个广义定义。
Rm = c (T − δ) cT c ≈ = 2 2 2 f PR
当脉冲重复频率为300Hz时,最大不模糊距离约为 500千米。 解决距离模糊的方法: 1.降低雷达脉冲重复频率 2.脉冲重复频率参差
脉冲多普勒雷达的总结

脉冲多普勒雷达的总结适用范围1、)雷达是在动目标显示雷达基础上发展起来的一种新型雷达脉冲多普勒(PD有更强体制。
这种雷达具有脉冲雷达的距离分辨力和连续波雷达的速度分辨力,的抑制杂波的能力,因而能在较强的杂波背景中分辨出动目标回波。
PD雷达的定义及其特征2、 PD雷达是一种利用多普勒效应检测目标信息的脉冲雷达。
)(1 定义:,以致不论杂波或所观PRF)(2)特征:①具有足够高的脉冲重复频率(简称测到的目标都没有速度模糊。
②能实现对脉冲串频谱单根谱线的多普勒滤波,即频域滤波。
很高,通常对所观测的目标产生距离模糊。
③PRF雷达的分类3、PD1 PD 图雷达的分类图MTI雷达(低:测距清晰,测速模糊PRF)①):测距模糊,测速模糊,是机载雷达的最佳波形选择PRF②PD雷达(中 PRF③PD雷达(高):测距模糊,测速清晰、机载下视PD雷达的杂波谱分析4雷达的地面杂波是由主瓣杂波、旁瓣杂波和高度线杂波所组成PD机载下视的。
1表多普勒中心频率变化范围特点①强度比雷达接收机的噪声强70-90dB②与天线主波束的宽度、方向角、载机速度、发射信号波长有主瓣杂波关①当PD雷达不运动时,旁瓣杂波与主瓣杂波在频域上相重合;旁瓣杂波②当PD雷达运动时,旁瓣杂波与主瓣杂波就分布在不同的频域上①机载下视PD雷达做平行于地面的运动高度线杂波②在零多普勒频率处总有一个较强的“杂波”①恰当选择雷达信号的PRF,使得其地面杂波既不重叠也不连接无杂波区②其频谱中不可能有地面杂波,只有接收机内部热噪声的部分5、PRF的选择(1)高、中、低脉冲重复频率的选择①机载雷达在没有地杂波背景干扰的仰视情况下,通常采用低PRF加脉冲压缩。
②迎面攻击时高PRF优于中PRF。
尾随时,在低空,中PRF优于高PRF ;在高空,高PRF优于中PRF。
③交替使用中、高PRF的方法,或者再加上在下视时采用低PRF的方法,并在低、中PRF时配合采用脉冲压缩技术,将是在所有工作条件下得到远距离探测性能的最有效的方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.脉冲多普勒雷达的跟踪 (1)单目标跟踪系统 (1-1)角度跟踪系统 根据角度,距离和速度信息,用伺服系统始终跟踪目标。 补充:常规雷达单目标跟踪方式:圆锥扫描,单脉冲体制。 回波 扫描角度
目标 扫描轨迹
回波
扫描角度 图3.8 圆锥扫描示意
βx 波程差l y x 图3.9 单脉冲跟踪示意 目标方位βx与波程差l和信号相位差θ的关系: (3-9)
2.PD雷达的分类 PD雷达的分类 1.高重频脉冲多普勒雷达 2.中重频脉冲多普勒雷达 3.低重频脉冲多普勒雷达 三种雷达的性能见下表: 表3-1 性能 PRF 低 测距 清晰 测速 模糊 测距设备、信号处理 简单 测速精度 旁瓣杂波电平 主瓣杂波抑制 允许方位扫描角 发现地面动目标 低 低 差 小 差
f c ,max =
2v R cos ψ λ
角度变化范围是0-360度,所以,旁瓣多普勒频率范围是... 当PD雷达不动是主瓣杂波与旁瓣杂波在频域上是重合的 (3)垂直(高度线)杂波。 雷达副瓣垂直照射地面,地面反射较强,回波中存在一个较强的" 零频"杂波. (4)无杂波区 适当选择雷达脉冲重复频率使地面杂波不连续不重叠,形成无杂波 区.在无杂波区域,只有接收机噪声,没有地面杂波,有利于发 现该区域的运动目标.
fd =
2v 2vf 0 = λ c
如果直接接收运动物体产生的波,多普勒频移为:
v vf 0 fd = = λ c
对回波进行频谱分析就可计算出目标相对速度。物体向着接收机运 动,fd >0;物体离开接收机,fd<0。
2. 脉冲雷达与连续波雷达 脉冲雷达发射微波脉冲,在两个脉冲间隙期间接收回波,根据接收 到的回波相对于发射脉冲的延迟时间τ计算目标径向距离R。目前普 遍使用的警戒雷达、航管雷达等均为脉冲雷达。 脉冲雷达的最大特点是发射脉冲与接收回波在时间上是分开的。 连续波雷达发射的是连续波,发射脉冲的时候同时接收回波。主要 用于测速。设发射信号频率为f0,目标运动产生的多普勒频率为fd, 电路框图为: 连续波 产生器 发射机 +fd 接收机 相参 检波器 fd
中 模糊 模糊 复杂 高 中 良 中 良
高 模糊 清晰 复杂 最高 高 优 大 优
§3.2脉冲多普勒雷达的杂波
PD雷达通常为机载雷达,在频域-时域分布范围广、功率强的背景 杂波中检测出有用的信号。背景杂波主要是地杂波,相对于飞机, 它是运动杂波,称之为脉冲多普勒杂波。 机载下视PD PD雷达的杂波谱 1.机载下视PD雷达的杂波谱 由于天线方向图和下视PD雷达与地面之间的相对运动使地面杂波复 杂了。
τ= α 1 1 = = Ω 6 × 360 / 60 36
PPR ≥
N = 36 × 5 = 185 τ
雷达脉冲重复频率至少应为185Hz。如果其他条件 不变,天线扫描速度改为12周/秒,则雷达脉冲重复频率 应为370Hz以上。典型数据:fPR为280Hz、300Hz。 关于距离模糊:考察下图:
第二章 小结 1.虚警概率、发现概率、虚警时间 2.最佳判决准值 3.匹配滤波器 4.检波器,包络检波、相干检波 5.脉冲积累 6.动目标显示 7.恒虚警处理
第三章 脉冲多普勒雷达
1.多普勒效应 运动物体的回声具有频移,这种频移现象就是多普勒效应。 设声波或电磁波的波长为λ,频率为f0,速度为c,运动物体的径向速 度为v,回波多普勒频移为fd,则:
λ
∆f MB θ θ 2v = f d ψ 0 − B − f d ψ 0 + B ≈ R θ B sin ψ 0 2 2 λ
fd =
2v R
cosψ 0
(3-7)
机载PD雷达的主瓣杂波强度与下列因数有关: 发射机功率,天线增益,地物反射特性,雷达距地面高度等.具体强 度可以比雷达接收机的噪声高70-90分贝. (2)旁瓣杂波 · 雷达天线总是存在若干副瓣(旁瓣),通过旁瓣产生旁瓣杂 波. · 旁瓣与主瓣是由不同的地物产生的 · 旁瓣杂波的频率为:
§3.1脉冲多普勒雷达的基本概念
脉冲多普勒雷达简称PD雷达,特点: 具有脉冲雷达的距离分辨能力 具有连续波雷达的速度分辨率 有强的杂波抑制能力
1.PD雷达的定义 雷达的定义 20世纪70年代初的定义 (1)具有足够高的PRF,使观测范围内的目标、杂波时 均没有速度模糊。 (2)能对脉冲串频谱单根谱线滤波。 (3)对观测目标的距离有一定的模糊。 上世纪70年代中期,制造出中重频PD雷达,既有距离 模糊又有速度模糊。而将原来的定义称为高重频PD雷达。 最后,不管雷达的重复频率,只要满足上述定义第二条, 就可称为PD雷达,是一个广义定义。
6.恒虚警处理 现在恒虚警处理均在零中频上进行。 7.线性调频频谱变换(p91) 进行频谱分析最简单的方法就是进行傅立叶 变换。我们也可以用若干滤波器组成滤波器组进 行频谱分析。得益于CCD器件和SAW器件的发 展。 §3.4脉冲多普勒雷达数据处理 数据处理的目的:最大限度提取雷达目标的 坐标信息。内容:解测距模糊,解测速模糊和目 标跟踪。
T τ
P1
s1
P2 s2 P3 图3.4 脉冲雷达距离模糊图解
s3
t
图中,P1-P3为雷达发射脉冲,s1-s3为回波脉冲,T 为发射脉冲重复周期,τ为回波延迟时间。
所谓距离模糊,指回波延迟时间大于T,比如对应于P1 的回波在s2位置,我们不能判断延迟时间为τ还是T+τ。 又设脉冲宽度为δ,雷达最大不模糊距离Rm为:
l = x sin β xlθ=来自λ× 360(度)
( 3-10) ( 3-11)
λθ β x = arcsin 360 x
同样可以求得y方向的方位角βy。 在PD雷达中实现单脉冲体制是非常困难的:性能优良的杂波滤波器 极点多,相位特性变化陡,要使四个接收通道的相位特性一致是 非常困难的。解决途径: a. 用圆锥扫描体制。 b. 用单脉冲合并通道技术。 (1-2)速度跟踪系统 实际上跟踪多普勒频率。用锁频或锁相方式跟踪。 (1-3)距离跟踪系统 常规雷达是用距离门跟踪方式: R 图3.10 距离门跟踪示意
2.脉冲重复频率的选择 根据技术要求和用途(如要求雷达在无杂波区检测目标还是满足无模糊测速), 也可以根据战术要求选择高,中,低脉冲重复频率段. 结果:
旁瓣杂波
适用 情况
在距离上重 叠情况
在频域上重 叠情况
低 PRF 中 PRF 高 PRF
很少 部分 无
严重 部分 无
低速目 标 机载 机载
雷达能改变PRF最好. 如美国:p85
主瓣 旁瓣 -180 0 180 度 图3.5 天线方向图 vR
垂直杂波 旁瓣杂波 主瓣杂波 地面 ψ ψ0 图3.6 机载PD雷达下视情况
机载雷达共有3种杂波: 主瓣杂波,旁瓣杂波,垂直杂波。
(1)主瓣杂波 主波束中心与地平面有一个锐角ψ0,多普勒频移为: (3-6) 主波束增益最高,杂波也最强。主波束有一定的立体角,在该 立体角中不同方位回波的多普勒频移也是不同的.设主波束宽度为θB, 主瓣杂波的边沿位置间的最大多普勒频率差为:
P4 R2
P5 R3
P6 R4
(a)发射脉冲串与回波脉冲串
(b)回波实际延迟时间 说 明 : Pi 为 发 射 脉 冲 Ri为回波信号
(c)显示器显示情况 图3.11 测距模糊的产生
由于目标回波的延迟时间可能大于脉冲重复周 期,使收发脉冲的对应关系发生了混乱,同一距离读数 对应的目标真实距离有多种可能值的现象叫做测距模糊。 未经解模糊肯定的读数距离叫做模糊距离。如果雷达的 最大探测距离小于模糊距离,就不存在距离模糊的问题。 PD雷达和部分警戒雷达的最大探测距离大于模糊距离, 需要解模糊。 关于速度模糊。目标径向速度与多普勒频移成 正比,研究速度模糊与研究多普勒频率模糊是等价的。 采样信号的频谱关系如图3.12。
在PD雷达中,距离跟踪采用距离门和速度联合的方法 (2)四维分辨跟踪系统 对速度、距离、方位角、俯仰角联合跟踪。 (3)多目标跟踪 采用边扫描边跟踪方式。相控阵体制可进行多波束跟踪。
上节课
2.测距和测速模糊的解算
(1)测距和测速模糊的基本概念 为了提高检测性能,PD雷达采用高PRF信号,以便在频域获得 足够宽的无杂波区。发射一个脉冲之后,回波可能隔几个周期才回 来,但接收时不能判断该回波对应于哪一个发射脉冲,于是发生了 测距模糊。读出的目标距离误差是:
§3.3脉冲多普勒雷达信号处理
PD雷达充分利用多普勒信息,能从强的地物杂波背景中检测出运动 目标. 1.电路框图
接收机 混频 中放 发射机 脉冲抑制 距离 选通 单边带 滤波
收发开关 发射机 多普勒 滤波 主瓣杂 波滤波 滤波 滤波 器组 显示
2.单边带滤波器 该滤波器是在中频上进行的,单独滤出一根谱线, 形成连续波,因而距离跟踪应事先完成.单边带滤波可 以改善目标频谱混叠. 3.主瓣杂波抑制滤波器 目的是滤除强地杂波,相当于一个白化滤波器,幅 频特性应为主瓣杂波频谱包络的倒数.主瓣杂波抑制滤 波器是一个频率自适应滤波器。 4.高度杂波的滤除 高度杂波比漫反射杂波强得多,与发射机泄露的功 率谱重叠,在零频附近.高度杂波滤波器是一个零频滤 波器。 5.多普勒滤波器组 多普勒滤波器组由若干窄带滤波器组成。
图3-1 连续波雷达测速原理图
调频连续波雷达一般用于测量雷达高度
测高雷达 f1 发射 接收 t 地面 ∆f t 图3.2测高雷达示意 图3.3测高雷达频率关系
连续波雷达的最大特点是发射和接收是同时进行的。
3.雷达脉冲重复频率PRF与雷达模糊距离
雷达脉冲重复频率PRF的选择与下列因素有关: 最大不模糊距离、脉冲积累数、MTI滤波器级数、天线扫描速度、 波束宽度等。 例:设波束宽度为1o,扫描速度为6周/分钟,每个目标至少有5 个回波。计算雷达脉冲重复频率。 解:设天线扫描每次照射目标的时间为τ,天线扫描速度 ,波束宽度 α,雷达脉冲重复频率fPR,每次目标回波数N,则: